EP3750841B1 - Dispositif de manutention d'un panneau rigide et procédé de manutention utilisant un tel dispositif - Google Patents
Dispositif de manutention d'un panneau rigide et procédé de manutention utilisant un tel dispositif Download PDFInfo
- Publication number
- EP3750841B1 EP3750841B1 EP20177123.5A EP20177123A EP3750841B1 EP 3750841 B1 EP3750841 B1 EP 3750841B1 EP 20177123 A EP20177123 A EP 20177123A EP 3750841 B1 EP3750841 B1 EP 3750841B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- plate
- frame
- grippers
- clamps
- handling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 6
- 239000000853 adhesive Substances 0.000 claims 10
- 230000001070 adhesive effect Effects 0.000 claims 10
- 230000002452 interceptive effect Effects 0.000 description 3
- 230000000903 blocking effect Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000000151 deposition Methods 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000005303 weighing Methods 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/02—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by suction means
- B66C1/0237—Multiple lifting units; More than one suction area
- B66C1/0243—Separate cups
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H15/00—Overturning articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H5/00—Feeding articles separated from piles; Feeding articles to machines
- B65H5/08—Feeding articles separated from piles; Feeding articles to machines by grippers, e.g. suction grippers
- B65H5/10—Reciprocating or oscillating grippers, e.g. suction or gripper tables
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/02—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by suction means
- B66C1/0256—Operating and control devices
- B66C1/0262—Operating and control devices for rotation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/04—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by magnetic means
- B66C1/06—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by magnetic means electromagnetic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/10—Handled articles or webs
- B65H2701/17—Nature of material
- B65H2701/173—Metal
Definitions
- the technical field of the invention is that of devices for handling rigid panels, such as metallic or non-metallic plates, and handling methods using such devices.
- Such a device requires a specific table able to pass a jaw of each gripper under the plate and requires that the gripping position of the plate is different from the depositing position of the plate.
- Such a device is not compatible with use on a machine tool intended to work both sides of the plate and which therefore requires gripping and resting the plate on each of its faces in exactly the same place and this without allow the passage of any tool under the plate.
- EP1036753 discloses a handling device according to the preamble of independent claim 1.
- the invention proposes to solve this handling problem by proposing a handling device which allows a simple reversal of the plate with deposit in the same place as the seizure and without passing through an intermediate deposit station.
- the proposed handling device also allows a plate to be placed in a vertical position on a storage space.
- the subject of the invention is a device for handling a rigid panel such as a plate, device comprising a load-bearing frame, frame able to move and comprising at least one gripper by adhesion intended to adhere on command with a first face oriented towards the top of the plate, frame comprising at least one clamp arranged at one of the ends of the frame and intended to clamp an edge of the plate, clamp capable of pivoting through at least 180 degrees around a substantially horizontal reversal axis by means of 'a motorization so as to return the plate partially or completely so as to expose a second face upwards.
- the device comprises two clamps having their reversal axes coaxial.
- the device may comprise at least three gripping grippers integral with the frame and distributed so as to maintain the plate in a balanced manner with respect to the frame.
- the grippers by adhesion may include electromagnets or may include suction cups.
- the frame may comprise at least one horizontal beam on which the grippers will be fixed by adhesion, a beam which will be vertically movable relative to the vertical uprights so as to be able to handle the plate.
- the grippers may be integral with the vertical uprights and may be movable relative to the latter in order to be able to be placed facing the edges of the plate once the grippers have grasped the plate.
- a gripping device 1 comprises a frame 2 comprising two vertical uprights 2a connected by a horizontal beam 2b.
- the frame 2 comprises three pairs of grippers 3. Each pair of grippers 3 comprises a gripper 3 positioned on each side of the beam 2a so as to balance the assembly.
- the grippers 3 are grippers by adhesion and they therefore have the ability to adhere to a flat surface by the action of a control means 11.
- Such grippers may be constituted for example by electromagnets whose magnetic adhesion is controlled by the passage of an electric current in a coil of the gripper.
- the grippers 3 may consist of suction cups, the adhesion of which is controlled by a pneumatic depression.
- the frame 2 comprises, in the vicinity of each of the lower ends of the uprights 2a, a clamp 4 which is controllable in opening and closing.
- the grippers 3 and the clamps 4 are movable relative to each other by the ends of the beam 2b sliding along the uprights 2a.
- the vertical movement of the beam 2b is ensured on the one hand by a conventional lifting means, and not shown, of the hoist type for example, capable of lifting the whole of the frame 1 or by a vertical mobility means M located at each end of the beam 2b and comprising, for example, a motorized nut M intended to rotate around a screw that the associated upright 2a comprises so as to make raise or lower the beam 2 along the amount 2a.
- the grippers 4 have hydraulically activated jaws 4 sized to be able to hold a plate 10 weighing several hundred kilos in a pinch.
- the length of the beam 2b can vary thanks to sleeves 5 of the beam 2b in which the bars 6 of the beam 2b can slide and this by simple spacing or bringing together of the uprights 2a of the chassis 2.
- the adjustment of the length of the beam 2b can be done manually by moving the uprights 2a apart or bringing them closer to each other then by blocking the sliding of the bars 2b relative to the sleeves 5 by pins for example (pins not shown) in the case where a long series of plates of the same size must be handled.
- clamps 4 can each pivot around a substantially horizontal pivot axis 4a.
- the pivot axes 4a of each gripper are co-linear and a pivot motor P allows rotational drive of at least one gripper 4 around the pivot axle 4a.
- the clamps 4 also include a translation motor means T of the clamps 4 collinearly with the pivot axis 4a.
- the device 1 is located above a work surface 20 on which rests a plate 10 to be grasped.
- the spacing between the uprights 2a of the frame 2 is chosen by the person skilled in the art so that it is adapted to the dimension of the plate 10 to be gripped by sliding the bars 6 in the sleeves 5 of the beam 2b .
- the frame 2 is lowered vertically by the lifting means until the grippers 3 are in contact with a first face 10a of the plate 10, first face 10a which is exposed upwards.
- the adhesion of the grippers 3 with the plate 10 is caused by the action on the control means 11.
- the frame 2 is raised by the lifting means to a height H of the work surface 20 (H is the distance between the axis 4a of the grippers and the work surface 20) and the grippers 3 are raised thanks to the motor means M relative to the clamps 4 so that opposite edges of the plate 10 are at the same vertical level as the clamps 4. It can be seen that thanks to the invention the plate 10 can be lifted without it being necessary to have access to its peripheral edges. This is very useful when the plate has dimensions smaller than those of the worktop.
- the clamps 4 are brought closer to the edges of the plate 10 thanks to the translation means T then clamp the opposite edges of the plate 10. It is noted in the present case that the pivot axes 4a of the clamps 4 are coplanar with the plate 10. The plate 10 being lifted from the work surface 20, we have access to its peripheral edges and the clamps 4 will be able to grasp the plate at this level, which was not possible when the plate was placed on the work surface. 20.
- the grippers 3 are controlled so as to interrupt their adhesion with the plate 10.
- the beam 2b is raised along the uprights 2a at a distance D from the plate 10 thanks to the vertical mobility means M.
- the distance D is chosen such that the plate 10 can subsequently pivot without interfering with the grippers 3.
- the height H between the pivot axis 4a of the grippers and the work surface 20 is also chosen as that plate 10 can subsequently pivot without interfering with worktop 20.
- the plate 10 is pivoted around the pivot axes 4a of the grippers 4.
- the distance D between the pivot axis 4a and the beam 2b carrying the grippers 3 and the height H separating these same pivot axes 4a from the work plane 20 are such that the plate 10 can rotate without interfering with the grippers 3 or with the work plan 20.
- the vertical position could possibly be used to move the plate vertically and store it in a suitable support.
- a blocking means (not shown) of the plate in the vertical position will then be provided.
- the reversal of the plate 10 is then partial.
- the plate 10 has been rotated 180 degrees (complete reversal), relative to its initial angular position shown in figures 1 to 3 , so as to expose a second face 10b exposed upwards to allow machining or assembly.
- the plate 10 has its first face 10a facing the work surface 20.
- the grippers 3 are lowered using the vertical mobility means M and brought back into contact with the plate 10, then adhesion is activated.
- the plate 10 thus maintained, the clamps 4 can be loosened and moved away from the plate 10 thanks to the translation means T.
- FIG 10 The frame 2 is lowered vertically by means of the lifting means until the plate 10 rests on the work surface 20 by its first face 10a, which allows the adhesion of the grippers 3 to be stopped.
- the frame 2 is then moved away of the work surface 20 thanks to the lifting means thus leaving the plate 10 turned over, placed on its first face 10a, thus leaving free access to the second face 10b and this without passing through an intermediate workstation or the use of a specially arranged work surface.
Description
- Le domaine technique de l'invention est celui des dispositifs de manutention de panneaux rigides, tels que des plaques métalliques ou non, et des procédés de manutention utilisant de tels dispositifs.
- Afin de retourner une plaque qui expose en partie supérieure une première face, plaque disposée sensiblement horizontalement sur un plan de travail, il est connu du brevet
FR3047984 - Un tel dispositif nécessite une table spécifique apte à faire passer une mâchoire de chaque pince sous la plaque et impose que la position de saisie de la plaque soit différente de la position de dépose de la plaque.
- Un tel dispositif n'est pas compatible d'une utilisation sur une machine-outil destinée à ouvrager les deux faces de la plaque et qui impose donc une saisie et une repose de la plaque sur chacune de ses faces exactement au même endroit et ceci sans permettre le passage d'un quelconque outillage sous la plaque.
- On connaît également par le brevet
EP1036753 un dispositif de manutention comportant des pinces pouvant tourner autour d'un axe vertical pour s'appliquer sur des bords latéraux de la plaque. Mais un tel dispositif de manutention ne permet pas le retournement de la plaque. -
EP1036753 divulgue un dispositif de manutention selon le préambule de la revendication indépendante 1. - On connaît enfin par les brevets
FR2173995 JPS54-56871U - L'invention propose de résoudre ce problème de manutention en proposant un dispositif de manutention qui permet un retournement simple de la plaque avec dépose au même endroit que la saisie et sans passage par une station de dépose intermédiaire.
- Le dispositif de manutention proposé permet également une dépose d'une plaque en position verticale sur un espace de rangement.
- Ainsi l'invention a pour objet un dispositif de manutention d'un panneau rigide tel une plaque, dispositif comportant un châssis porteur, châssis apte à se mouvoir et comportant au moins un préhenseur par adhérence destiné à adhérer sur commande avec une première face orientée vers le haut de la plaque, châssis comportant au moins une pince disposée à une des extrémités du châssis et destinée à pincer un bord de la plaque, pince apte à pivoter sur au moins 180 degrés autour d'un axe de retournement sensiblement horizontal au moyen d'une motorisation de manière à retourner la plaque partiellement ou complètement de façon à exposer une seconde face vers le haut.
- Selon un mode particulier de réalisation, le dispositif comporte deux pinces ayant leurs axes de retournement coaxiaux.
- Le dispositif pourra comporter au moins trois préhenseurs par adhérence solidaires du châssis et répartis de manière à maintenir la plaque de façon équilibrée par rapport au châssis.
- Selon différents modes de réalisation : les préhenseurs par adhérence pourront comporter des électroaimants ou pourront comporter des ventouses.
- Selon des modalités particulières de réalisation, le châssis pourra comporter au moins une poutre horizontale sur laquelle seront fixés les préhenseurs par adhérence, poutre qui sera mobile verticalement par rapport à des montants verticaux de manière à pouvoir manutentionner la plaque.
- Les pinces pourront être solidaires des montants verticaux et pourront être mobiles relativement à ces derniers afin de pouvoir être placées en regard des bords de la plaque une fois que les préhenseurs ont saisi la plaque.
- L'invention porte également sur un procédé de manutention d'un panneau rigide tel une plaque qui est disposée sur un plan de travail et mettant en œuvre un dispositif de manutention selon l'une des caractéristiques précédentes, procédé tel que :
- on fait descendre le châssis vers la plaque jusqu'à ce que les préhenseurs par adhérence entrent en contact avec la plaque;
- on commande les préhenseurs par adhérence pour qu'ils adhèrent avec la plaque;
- on lève la plaque par un mouvement de montée du châssis;
- on amène les pinces au voisinage des bords de la plaque;
- on commande le serrage de la plaque par les pinces au niveau de bords opposés;
- on libère les préhenseurs par adhérence et on les place à distance de la plaque;
- on fait pivoter les pinces d'au moins 90° par rapport au châssis.
- Selon un mode particulier de mise en œuvre :
- on fait pivoter les pinces de 180° par rapport au châssis;
- on amène les préhenseurs par adhérence en contact avec la plaque et on les commande pour qu'ils adhèrent avec celle-ci ;
- on desserre les pinces et on les écarte de la plaque ;
- on abaisse le châssis jusqu'à ce que la plaque repose sur le plan de travail;
- on libère les préhenseurs par adhérence et on éloigne le châssis du plan de travail.
- L'invention sera mieux comprise à la lecture de la description suivante, description faite à la lumière des dessins en annexe, dessins dans lesquels :
- [
Fig.1 ] représente une vue de trois quarts d'un dispositif selon l'invention lors d'une première phase de retournement d'une plaque. - [
Fig.2 ] représente une vue de trois quarts d'un dispositif selon l'invention lors d'une deuxième phase de retournement d'une plaque. - [
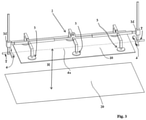
Fig.3 ] représente une vue de trois quarts d'un dispositif selon l'invention lors d'une troisième phase de retournement d'une plaque. - [
Fig.4 ] représente une vue de trois quarts d'un dispositif selon l'invention lors d'une quatrième phase de retournement d'une plaque. - [
Fig.5 ] représente une vue de trois quarts d'un dispositif selon l'invention lors d'une cinquième phase de retournement d'une plaque. - [
Fig.6 ] représente une vue de trois quarts d'un dispositif selon l'invention lors d'une sixième phase de retournement d'une plaque. - [
Fig.7 ] représente une vue de trois quarts d'un dispositif selon l'invention lors d'une septième phase de retournement d'une plaque. - [
Fig.8 ] représente une vue de trois quarts d'un dispositif selon l'invention lors d'une huitième phase de retournement d'une plaque. - [
Fig.9 ] représente une vue de trois quarts d'un dispositif selon l'invention lors d'une neuvième phase de retournement d'une plaque. - [
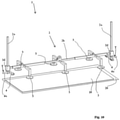
Fig.10 ] représente une vue de trois quarts d'un dispositif selon l'invention lors d'une dixième phase de retournement d'une plaque. - Selon la
figure 1 , un dispositif de préhension 1 selon l'invention comporte un châssis 2 comportant deux montants verticaux 2a reliés par une poutre horizontale 2b. - Le châssis 2 comporte trois paires de préhenseurs 3. Chaque paire de préhenseur 3 comporte un préhenseur 3 positionné de chaque côté de la poutre 2a de manière à équilibrer le montage.
- Les préhenseurs 3 sont des préhenseurs par adhérence et ils ont donc la capacité d'adhérer à une surface plane par l'action d'un moyen de commande 11.
- De tels préhenseurs pourront être constitués par exemple par des électroaimants dont l'adhérence magnétique est commandée par le passage d'un courant électrique dans une bobine du préhenseur. Les préhenseurs 3 pourront être constitués par des ventouses dont l'adhérence est commandée par une dépression pneumatique.
- L'Homme du Métier choisira le type de préhenseur 3 selon la nature et la masse du matériau de la plaque 10 auquel les préhenseurs sont destinés à adhérer.
- Le châssis 2 comporte, au voisinage de chacune des extrémités inférieures des montants 2a, une pince 4 qui est commandable en ouverture et fermeture. Les préhenseurs 3 et les pinces 4 sont mobiles les uns par rapport aux autres par coulissement des extrémités de la poutre 2b le long des montants 2a. Le mouvement vertical de la poutre 2b est assuré d'une part par un moyen de levage classique, et non représenté, de type palan par exemple, apte à lever l'ensemble du châssis 1 ou par un moyen de mobilité verticale M situé à chaque extrémité de la poutre 2b et comportant, par exemple, un écrou motorisé M destiné à tourner autour d'une vis que comporte le montant 2a associé de manière à faire monter ou descendre la poutre 2 le long des montant 2a. De même, les pinces 4 ont des mâchoires 4 activées hydrauliquement et dimensionnées pour pouvoir maintenir pincée une plaque 10 de plusieurs centaines de kilos.
- On note que selon un mode de réalisation particulier, la longueur de la poutre 2b peut varier grâce à des manchons 5 de la poutre 2b dans lesquels peuvent coulisser des barres 6 de la poutre 2b et ceci par simple écartement ou rapprochement des montants 2a du châssis 2. L'ajustement de la longueur de la poutre 2b pourra se faire manuellement en écartant ou en rapprochant les montants 2a l'un de l'autre puis en bloquant le coulissement des barres 2b relativement aux manchons 5 par des goupilles par exemple (goupilles non représentées) dans le cas où une longue série de plaques de même dimension doivent être manutentionnées.
- Dans le cas où la longueur des plaques à manutentionner est appelée à varier souvent, il est envisageable d'automatiser le réglage de l'écartement entre montants 2a, et donc entre pinces 4, en incluant un vérin reliant chacun des montants 2a, vérin pouvant être placé dans la poutre 2b par exemple (vérin non visible). Il est à noter également que les pinces 4 peuvent pivoter chacune autour d'un axe de pivotement 4a sensiblement horizontal. Les axes de pivotement 4a de chaque pince sont colinéaires et un moteur de pivot P permet l'entrainement en rotation d'au moins une pince 4 autour de l'axe de pivotement 4a. Les pinces 4 comportent aussi un moyen moteur de translation T des pinces 4 colinéairement à l'axe de pivotement 4a.
- Toujours selon la
figure 1 , le dispositif 1 est situé au-dessus d'un plan de travail 20 sur lequel repose une plaque 10 à saisir. L'écartement entre les montants 2a du châssis 2 est choisi par l'Homme du Métier de manière à ce qu'il soit adapté à la dimension de la plaque 10 à saisir en faisant coulisser les barres 6 dans les manchons 5 de la poutre 2b. - Selon la
figure 2 , le châssis 2 est abaissé verticalement grâce au moyen de levage jusqu'à ce que les préhenseurs 3 soient en contact avec une première face 10a de la plaque 10, première face 10a qui est exposée vers le haut. L'adhérence des préhenseurs 3 avec la plaque 10 est provoquée par l'action sur le moyen de commande 11. - Selon la
figure 3 , le châssis 2 est relevé par le moyen de levage à une hauteur H du plan de travail 20 (H est la distance entre l'axe 4a des pinces et le plan de travail 20) et les préhenseurs 3 sont remontés grâce au moyen moteur M relativement aux pinces 4 de manière à ce que des bords opposés de la plaque 10 se trouvent au même niveau vertical que les pinces 4. On voit que grâce à l'invention on peut soulever la plaque 10 sans qu'il soit nécessaire d'avoir accès à ses bords périphériques. Ceci est très utile lorsque la plaque a des dimensions inférieures à celles du plan de travail. - Selon la
figure 4 , les pinces 4 sont rapprochées des bords de la plaque 10 grâce au moyen de translation T puis serrent les bords opposés de la plaque 10. On note dans le cas de figure présent que les axes de pivotement 4a des pinces 4 sont coplanaires à la plaque 10. La plaque 10 étant soulevée du plan de travail 20, on a accès à ses bords périphériques et les pinces 4 vont pouvoir saisir la plaque à ce niveau, ce qui n'était pas possible quand la plaque était posée sur le plan de travail 20. - Selon la
figure 5 , les préhenseurs 3 sont commandés de manière à interrompre leur adhérence avec la plaque 10. La poutre 2b est remontée le long des montants 2a à une distance D de la plaque 10 grâce aux moyens de mobilité verticale M. La distance D est choisie telle que la plaque 10 puisse pivoter par la suite sans interférer avec les préhenseurs 3. Par ailleurs la hauteur H entre l'axe 4a de pivotement des pinces et le plan de travail 20 est également choisie telle que plaque 10 puisse pivoter par la suite sans interférer avec le plan de travail 20. - Selon les
figures 6 et7 , la plaque 10 est pivotée autour des axes de pivotement 4a des pinces 4. On note à lafigure 7 que lorsque la plaque 10 est verticale, la distance D entre l'axe de pivotement 4a et la poutre 2b portant les préhenseurs 3 et la hauteur H séparant ces mêmes axes de pivotement 4a du plan de travail 20 sont telles que la plaque 10 peut tourner sans interférer avec les préhenseurs 3 ou avec le plan de travail 20. - La position verticale pourra être utilisée éventuellement pour déplacer verticalement la plaque et la ranger dans un support approprié. On prévoira alors un moyen de blocage (non représenté) de la plaque dans la position verticale. Le retournement de la plaque 10 est alors partiel.
- Selon la
figure 8 , la plaque 10 a été pivotée de 180 degrés (retournement complet), par rapport à sa position angulaire initiale représentée auxfigures 1 à 3 , de manière à exposer une seconde face 10b exposée vers le haut pour permettre des usinages ou assemblages. La plaque 10 a sa première face 10a en regard du plan de travail 20. - Selon la
figure 9 , les préhenseurs 3 sont abaissés grâce aux moyens de mobilité verticale M et remis en contact avec la plaque 10 puis l'adhérence est activée. La plaque 10 ainsi maintenue, les pinces 4 peuvent être desserrées et éloignées de la plaque 10 grâce aux moyens de translation T. - Selon la
figure 10 . Le châssis 2 est abaissé verticalement grâce au moyen de levage jusqu'à ce que la plaque 10 repose sur le plan de travail 20 par sa première face 10a, ce qui autorise à stopper l'adhérence des préhenseurs 3. On éloigne ensuite le châssis 2 du plan de travail 20 grâce au moyen de levage laissant ainsi la plaque 10 retournée, posée sur sa première face 10a, laissant ainsi libre accès à la seconde face 10b et ceci sans passage par une station de travail intermédiaire ni emploi d'un plan de travail 20 spécialement aménagé.
Claims (9)
- Dispositif (1) de manutention d'un panneau rigide tel une plaque (10), dispositif comportant un châssis (2) porteur, châssis (2) apte à se mouvoir et comportant au moins un préhenseur (3) par adhérence destiné à adhérer sur commande avec une première face (10a) orientée vers le haut de la plaque (10), châssis (2) comportant au moins une pince (4) disposée à une des extrémités du châssis (2) et destinée à pincer un bord de la plaque (10), caractérisé en ce que la pince (4) est apte à pivoter sur au moins 180 degrés autour d'un axe de retournement (4a) sensiblement horizontal au moyen d'une motorisation (P) de manière à retourner la plaque (10) partiellement ou complètement de façon à exposer une seconde face (10b) vers le haut.
- Dispositif (1) selon la revendication 1, caractérisé en ce qu'il comporte deux pinces (4) ayant leurs axes (4a) de retournement coaxiaux.
- Dispositif (1) selon une des revendications 1 à 2, caractérisé en ce qu'il comporte au moins trois préhenseurs (3) par adhérence solidaires du châssis (2) et répartis de manière à maintenir la plaque (10) de façon équilibrée par rapport au châssis (2).
- Dispositif (1) selon une des revendications 1 à 3, caractérisé en ce que les préhenseurs (3) par adhérence comportent des électroaimants (3).
- Dispositif (1) selon une des revendications 1 à 3, caractérisé en ce que les préhenseurs (3) par adhérence comportent des ventouses (3).
- Dispositif (1) selon une des revendications 1 à 5, caractérisé en ce que le châssis (2) comporte au moins une poutre (2b) horizontale sur laquelle sont fixés les préhenseurs (3) par adhérence, poutre (2b) qui est mobile verticalement par rapport à des montants verticaux (2a) de manière à pouvoir manutentionner la plaque (10).
- Dispositif (1) selon une des revendications 1 à 6, caractérisé en ce que les pinces (4) sont solidaires des montants (2a) verticaux et sont mobiles relativement à ces derniers afin de pouvoirs être placées en regard des bords de la plaque (10) une fois que les préhenseurs (3) ont saisi la plaque (10).
- Procédé de manutention d'un panneau rigide tel une plaque (10) qui est disposée sur un plan de travail (20) et mettant en œuvre un dispositif de manutention (1) selon l'une des revendications 1 à 7, caractérisé en ce que :- on fait descendre le châssis (2) vers la plaque (10) jusqu'à ce que les préhenseurs (3) par adhérence entrent en contact avec la plaque(10) ;- on commande les préhenseurs (3) par adhérence pour qu'ils adhèrent avec la plaque (10) ;- on lève la plaque (10) par un mouvement de montée du châssis (2) ;- on amène les pinces (4) au voisinage des bords de la plaque (10) ;- on commande le serrage de la plaque (10) par les pinces (4) au niveau de bords opposés ;- on libère les préhenseurs (3) par adhérence et on les place à distance de la plaque (10) ;- on fait pivoter les pinces (4) d'au moins 90° par rapport au châssis (2).
- Procédé de manutention d'une plaque (10) disposée sur un plan de travail selon la revendication 8, caractérisé en ce que :- on fait pivoter les pinces (4) de 180° par rapport au châssis (2) ;- on amène les préhenseurs (3) par adhérence en contact avec la plaque (10) et on les commande pour qu'ils adhèrent avec celle-ci ;- on desserre les pinces (4) et on les écarte de la plaque (10) ;- on abaisse le châssis (2) jusqu'à ce que la plaque (10) repose sur le plan de travail (20) ;- on libère les préhenseurs (3) par adhérence et on éloigne le châssis (2) du plan de travail (20).
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1906072A FR3097213B1 (fr) | 2019-06-11 | 2019-06-11 | Dispositif de manutention d'un panneau rigide et procédé de manutention utilisant un tel dispositif |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3750841A1 EP3750841A1 (fr) | 2020-12-16 |
| EP3750841B1 true EP3750841B1 (fr) | 2022-03-02 |
Family
ID=68343008
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20177123.5A Active EP3750841B1 (fr) | 2019-06-11 | 2020-05-28 | Dispositif de manutention d'un panneau rigide et procédé de manutention utilisant un tel dispositif |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3750841B1 (fr) |
| ES (1) | ES2913177T3 (fr) |
| FR (1) | FR3097213B1 (fr) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116495603B (zh) * | 2023-06-30 | 2023-08-29 | 山东三箭建设工程股份有限公司 | 一种可调节的工字钢梁起吊器 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BE795685A (fr) * | 1972-03-01 | 1973-06-18 | Siempelkamp Gmbh & Co | Dispositif de manipulation de feuilles de placage |
| JPS5629308Y2 (fr) * | 1977-09-29 | 1981-07-13 | ||
| DE19911897B4 (de) * | 1999-03-17 | 2008-02-21 | Woko Gmbh | Lasthebemagnet |
| FR3047984A1 (fr) | 2016-02-22 | 2017-08-25 | Entrepose Group | Outil pour le retournement et la manutention de toles |
-
2019
- 2019-06-11 FR FR1906072A patent/FR3097213B1/fr active Active
-
2020
- 2020-05-28 ES ES20177123T patent/ES2913177T3/es active Active
- 2020-05-28 EP EP20177123.5A patent/EP3750841B1/fr active Active
Also Published As
| Publication number | Publication date |
|---|---|
| ES2913177T3 (es) | 2022-05-31 |
| FR3097213B1 (fr) | 2021-05-21 |
| FR3097213A1 (fr) | 2020-12-18 |
| EP3750841A1 (fr) | 2020-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0069661B1 (fr) | Plieuse automatique de tôles | |
| EP3214025B1 (fr) | Prehension de palette | |
| EP3750841B1 (fr) | Dispositif de manutention d'un panneau rigide et procédé de manutention utilisant un tel dispositif | |
| FR2695586A1 (fr) | Dispositif et appareil de soudage. | |
| FR2982188A1 (fr) | Dispositif elliptique manipulateur de palier | |
| EP3150544B1 (fr) | Dispositif de préhension pour obus et civière associée | |
| FR2563757A1 (fr) | Cisaille a guillotine | |
| EP1908590A2 (fr) | Dispositif de transfert et machine d'impression | |
| EP3647208A1 (fr) | Chariot de transport | |
| FR2736626A1 (fr) | Appareil de manutention destine a manipuler des articles en forme de panneaux | |
| EP0188987B1 (fr) | Installation de palettisation notamment de paquets de sacs | |
| EP0252936A1 (fr) | Dispositif de separation de paquets de feuilles, en particulier de papier, formant une pile. | |
| WO2008068249A1 (fr) | Prehenseur de pieces de tolerie de taille et/ou de types differents | |
| FR2514738A1 (fr) | Dispositif de prehension et de manipulation de casiers, et casier associe | |
| EP3162741B1 (fr) | Methode d'extraction | |
| FR2972951A1 (fr) | Systeme de chargement-dechargement de grandes palettes porte-piece pour machine-outil | |
| FR2971496A1 (fr) | Outil de manipulation de produits | |
| EP3208042A1 (fr) | Outil pour le retournement et la manutention de tôles | |
| EP2097210B1 (fr) | Procede et systeme de positionnement d'une piece sur une chaine d'assemblage et de fabrication | |
| FR2491445A1 (fr) | Dispositif et procede de manutention et d'empilage d'objets parallelepipediques | |
| FR3055825A1 (fr) | Dispositif de deplacement d’un materiau en feuille et procede correspondant. | |
| FR2942157A1 (fr) | Dispositif de manutention concu pour une ligne d'emboutissage | |
| FR2795012A1 (fr) | Dispositif de transfert de pieces a usiner | |
| WO2024061864A1 (fr) | Système de préhension d'une pièce textile à fixation déverrouillable, notamment magnétique | |
| FR3139745A1 (fr) | Système de préhension d’une pièce textile |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: NEXTER SYSTEMS |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20210526 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B65H 15/00 20060101ALI20210920BHEP Ipc: B65H 5/10 20060101ALI20210920BHEP Ipc: B66C 1/06 20060101ALI20210920BHEP Ipc: B66C 1/02 20060101AFI20210920BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20211019 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 1472120 Country of ref document: AT Kind code of ref document: T Effective date: 20220315 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602020002027 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: FI Ref legal event code: FGE |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2913177 Country of ref document: ES Kind code of ref document: T3 Effective date: 20220531 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220602 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220602 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1472120 Country of ref document: AT Kind code of ref document: T Effective date: 20220302 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220603 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220704 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220702 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602020002027 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220528 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 |
|
| 26N | No opposition filed |
Effective date: 20221205 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220528 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20230419 Year of fee payment: 4 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20230531 Year of fee payment: 4 Ref country code: FR Payment date: 20230420 Year of fee payment: 4 Ref country code: ES Payment date: 20230601 Year of fee payment: 4 Ref country code: DE Payment date: 20230419 Year of fee payment: 4 Ref country code: CZ Payment date: 20230421 Year of fee payment: 4 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: TR Payment date: 20230428 Year of fee payment: 4 Ref country code: SE Payment date: 20230419 Year of fee payment: 4 Ref country code: FI Payment date: 20230419 Year of fee payment: 4 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20230419 Year of fee payment: 4 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230531 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 |