EP3686355B1 - Hydraulic excavator - Google Patents
Hydraulic excavator Download PDFInfo
- Publication number
- EP3686355B1 EP3686355B1 EP18858555.8A EP18858555A EP3686355B1 EP 3686355 B1 EP3686355 B1 EP 3686355B1 EP 18858555 A EP18858555 A EP 18858555A EP 3686355 B1 EP3686355 B1 EP 3686355B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- traveling
- manipulation levers
- levers
- work
- lock
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/225—Control of steering, e.g. for hydraulic motors driving the vehicle tracks
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2253—Controlling the travelling speed of vehicles, e.g. adjusting travelling speed according to implement loads, control of hydrostatic transmission
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/24—Safety devices, e.g. for preventing overload
Definitions
- the present invention relates mainly to a work vehicle including a lock mechanism for locking a traveling manipulation lever.
- Patent Literatures 1 and 2 disclose this type of work vehicle.
- PTL 1 discloses a traveling work machine including two traveling manipulation levers and fixing mechanisms.
- the two traveling manipulation levers are disposed in a standing manner in a portion of a machine base which portion is in front of a driver's seat.
- the two traveling manipulation levers have bases provided with actuating members configured to turn together with the traveling manipulation levers, respectively.
- the actuating members have respective latched pins.
- the fixing mechanisms include respective fixing pieces that are movable linearly. Each of the fixing pieces has an engagement recess. By causing the fixing piece to move linearly to have its engagement recess engage with the latched pin, the traveling manipulation lever is locked.
- PTL 2 discloses a small hydraulic excavator including two traveling manipulation levers and a traveling lock device.
- the two traveling manipulation levers are turnable about turning axes that are two tubes disposed below a floor, on which a driver's seat is mounted.
- the tubes i.e., portions close to the bases of the traveling manipulation levers
- the traveling lock device includes a lock plate and a hydraulic cylinder.
- the lock plate is disposed perpendicularly to the floor.
- the lock plate has a plurality of grooves.
- the hydraulic cylinder causes linear movement of the lock plate. As a result of the linear movement of the lock plate, the protruding parts of the tubes are inserted into the grooves of the lock plate, whereby the traveling manipulation levers are locked.
- the traveling manipulation lever is locked by restricting movement of an additional member disposed at a location close to the base of the traveling manipulation lever.
- the fixing mechanism or the traveling lock device needs to be disposed at a location close to the base of the traveling manipulation lever. This impairs the flexibility in designing.
- PTLs 1 and 2 also disclose that the fixing mechanism/the traveling lock device can be disposed in a space-saving manner.
- PTLs 1 and 2 disclose the configuration in which the fixing piece/the lock plate moves linearly, PTLs 1 and 2 fail to disclose any space-saving configuration other than this.
- a main object of some aspects of the present invention is to provide, to a work vehicle, a lock mechanism for locking a traveling manipulation lever, the lock mechanism having excellent flexibility in designing and being allowed to be mounted in a space-saving manner.
- the hydraulic excavator includes a traveling body, two traveling manipulation levers, and a lock mechanism.
- the traveling manipulation levers are configured to be tilted in a front-rear direction to give an instruction on traveling of the traveling body.
- the lock mechanism is capable of restricting the tilting of the two traveling manipulation levers in the front-rear direction.
- the lock mechanism includes a driving unit, a transmission unit, and a lock plate.
- the driving unit is configured to generate drive power.
- the transmission unit is configured to transmit the drive power generated by the driving unit.
- the lock plate is a plate-shaped member.
- the lock plate has a thickness direction being in parallel with longitudinal directions of the traveling manipulation levers positioned at a neutral position.
- the lock plate has a first recess and a second recess.
- the drive power transmitted via the transmission unit causes the lock plate to turn about a turning axis being in parallel with the longitudinal directions of the traveling manipulation levers being at the neutral position to change a position of the lock plate between a lock position, where the two traveling manipulation levers are respectively accommodated in the first recess and the second recess to restrict the tilting of the traveling manipulation levers in the front-rear direction, and a release position, where the two traveling manipulation levers are outside the first recess and the second recess.
- This configuration restricts movement of the traveling manipulation levers themselves, rather than movement of an additional member attached to the base of the traveling manipulation lever. This expands the range in which the lock mechanism can be attached, thereby making it possible to enhance the flexibility in designing. In addition, this configuration does not need the additional member attached to the traveling manipulation lever, and therefore can be simplified. Furthermore, since the lock plate has the thickness direction being in parallel with the longitudinal directions of the traveling manipulation levers being at the neutral position and the lock plate is configured to turn around the turning axis extending in the longitudinal direction, the lock plate can turn with a small turning trajectory. Therefore, the lock mechanism can be accommodated in a small space.
- the hydraulic excavator described above preferably includes the following features. That is, the driving unit includes a movable part, which is configured to perform a linear motion to generate the drive power.
- the transmission unit converts the linear motion of the movable part into a turning motion around a turning axis being in parallel with the longitudinal directions of the traveling manipulation levers being at the neutral position to cause the lock plate to turn.
- the direction in which the movable part performs the linear motion is in parallel with the longitudinal directions of the traveling manipulation levers being at the neutral position.
- the direction of the movable part performs the linear motion is in parallel with both of the longitudinal directions of the traveling manipulation levers being at the neutral position and the direction of the turning axis of the lock plate, and therefore it is possible to simplify the configuration of the transmission unit and to downsize the transmission unit.
- the hydraulic excavator described above preferably includes the following features. That is, the hydraulic excavator includes work manipulation levers and console boxes.
- the work manipulation levers are respectively disposed on the left and right sides of the driver's seat, and the work manipulation levers are usable for manipulation of at least a work device.
- the console boxes are respectively provided with the work manipulation levers, and the console boxes are turnable together with the work manipulation levers around a turning axis extending in a left-right direction.
- the lock mechanism starts restricting the tilting of the two traveling manipulation levers.
- the hydraulic excavator described above preferably includes the following features. That is, the hydraulic excavator includes a driver's seat and a floor. On the driver's seat, the operator can sit. On the floor, the operator sitting on the driver's seat can place his/her feet.
- the hydraulic excavator includes a steering box.
- the steering box is disposed so as to protrude upward from a portion of the floor which portion is in front of the driver's seat, and the steering box internally includes a direction selector valve unit made of a plurality of direction selector valves capable of changing a feeding direction of operating oil from one to another.
- the two traveling manipulation levers are disposed in the steering box.
- the steering box internally includes the lock mechanism.
- the effect of the present invention of making it possible for the lock mechanism to be accommodated in a small space is more effective. Also in view of the fact that the configuration in which the steering box is disposed in front of the driver's seat is often applied to small work vehicles, the effect of the present invention is more effective.
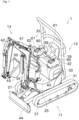
- FIG. 1 is a perspective view illustrating an overall structure of a revolving work vehicle 1 according to one embodiment of the present invention.
- FIG. 2 is a side view illustrating the revolving work vehicle 1.
- the revolving work vehicle (work vehicle) 1 of the present embodiment illustrated in FIGs. 1 and 2 includes a lower traveling body (traveling body) 11 and an upper revolving body 12.
- the lower traveling body 11 includes left and right paired crawler traveling devices 21 and hydraulic motors (not illustrated) configured to drive the crawler traveling devices 21.
- hydraulic motors not illustrated
- the upper revolving body 12 includes a revolving frame 31, an engine hood 32, an engine 33, a hydraulic pump unit 34, a work device 13, and a steering unit 35.
- the revolving frame 31 is disposed above the lower traveling body 11.
- the revolving frame 31 is supported by the lower traveling body 11 such that the revolving frame 31 is turnable about an axis perpendicular to a horizontal plane.
- a revolving motor (not illustrated), the revolving frame 31 can be driven to turn relative to the lower traveling body 11.
- the engine hood 32 is disposed in a rear portion of the revolving frame 31. Inside the engine hood 32, the engine 33 is disposed.
- the engine 33 is a diesel engine, for example.
- the hydraulic pump unit 34 is driven by the engine 33 to generate hydraulic force that the revolving work vehicle 1 requires to travel and to perform work.
- the work device 13 includes a boom 41, an arm 42, a bucket 43, and a blade (earth removing blade) 44.
- the boom 41, the arm 42, the bucket 43, and the blade 44 are respectively coupled to hydraulic cylinders. By extending and retracting these hydraulic cylinders with the hydraulic force generated by the hydraulic pump unit 34, it is possible to cause the boom 41 and the arm 42 to turn to change their positions, to cause the bucket 43 to perform work such as excavation work, and/or to cause the blade 44 to turn up and down.
- the steering unit 35 includes various manipulation members disposed in a space around a driver's seat 39, on which an operator can sit.
- the manipulation members are mainly disposed in the steering box 50 and console boxes 60.
- the expressions "front”, “rear”, “left”, and “right” in the following description respectively mean the front, rear, left, and right for the operator sitting on the driver's seat 39 in a state where both of the lower traveling body 11 and the upper revolving body 12 face the front.
- the steering box 50 is disposed in front of the driver's seat 39 such that the steering box 50 extends upward from a floor 25, on which the operator sitting on the driver's seat 39 can place his/her feet.
- the steering box 50 is provided with traveling manipulation levers 36 used to give an instruction on traveling of the revolving work vehicle 1 and a blade manipulation lever 37 used to give an instruction on lifting/lowering of the blade 44, for example.
- the traveling manipulation levers 36 are disposed so as to extend upward (specifically, obliquely rearward and upward) from the steering box 50.
- the traveling manipulation levers 36 are provided in a pair on the left and right sides. By manipulating the traveling manipulation lever 36 on the left side, it is possible to give an instruction to the crawler traveling device 21 on the left side. Meanwhile, by manipulating the traveling manipulation lever 36 on the right side, it is possible to give an instruction to the crawler traveling device 21 on the right side.
- By tilting the traveling manipulation levers 36 forward it is possible to cause the crawler traveling devices 21 to travel forward.
- By tilting the traveling manipulation levers 36 rearward it is possible to cause the crawler traveling devices 21 to travel backward. By positioning the traveling manipulation levers 36 at a neutral position, it is possible to stop the crawler traveling devices 21.
- the steering box 50 internally includes a direction selector valve unit 38.
- the direction selector valve unit 38 includes a plurality of direction selector valves for driving or stopping the hydraulic actuators of the revolving work vehicle 1 and the like.
- the direction selector valves include respective spools. Manipulation of the manipulation members causes displacement of the spools to drive the crawler traveling devices 21, the revolving motor, the work device 13, and the like.
- the left and right paired console boxes 60 are disposed to sandwich the driver's seat 39.
- the driver's seat 39 and the console boxes 60 are disposed on an upper surface of the engine hood 32 of the upper revolving body 12.
- the structures of the left and right console boxes 60 are symmetric to each other, and thus are substantially identical to each other.
- the left and right console boxes 60 are each provided with a work manipulation lever 61 and a lock lever 62.
- the console boxes 60 are supported turnably around a turning axis extending in a left-right direction, relative to brackets (not illustrated) fixed on the upper surface of the engine hood 32. Since the work manipulation levers 61 and the lock levers 62 are attached to the console boxes 60, the work manipulation levers 61 and the lock levers 62 turn together with the console boxes 60. Thus, as illustrated in FIG. 2 , the postures of the console boxes 60 can be changed between a normal posture, which is indicated by the solid lines, and a retracted posture, which is indicated by the two-dot chain lines.
- the operator on the revolving work vehicle 1 manipulates the work manipulation levers 61 after setting the console boxes 60 in the normal posture. Meanwhile, when the operator is to get on or off the revolving work vehicle 1, the operator sets the console box(es) 60 in the retracted posture so that the operator's body is not interfered with by the console box(es) 60.
- the work manipulation levers 61 extend upward (specifically, obliquely forward and upward) from upper portions of the console boxes 60.
- the work manipulation levers 61 are levers used to give an instruction on revolving of the upper revolving body 12 and instructions on driving of the boom 41, the arm 42, and the bucket 43.
- the lock lever 62 extends obliquely forward and upward from front portions of the console boxes 60. Both in a case where the console boxes 60 are in the normal posture and in a case where the console boxes 60 are in the retracted posture, turning of the console boxes 60 is restricted by a restriction mechanism (not illustrated). By turning the lock levers 62, it is possible to release the restriction by the restriction mechanism, thereby permitting turning of the console boxes 60.
- the console boxes 60 are each provided with a contact sensor and a contact member (each not illustrated). While the console boxes 60 are in the normal posture, the contact members are in contact with the contact sensors. At a timing when the console boxes 60 start turning rearward from the normal posture, the contact members are separated from the contact sensors. When the contact members are not in contact with the contact sensors, a solenoid valve (not illustrated) and/or the like is closed. Consequently, operating oil supply according to manipulation of the work manipulation levers 61 is interrupted, and accordingly manipulation of the work manipulation levers 61 is disabled. Furthermore, a lock mechanism 70 (described later) is actuated to lock the traveling manipulation levers 36.
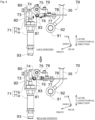
- FIG. 3 is a perspective view illustrating a configuration of the lock mechanism 70.
- FIGs. 4 and 5 are a side view and a plan view illustrating how the positions of the members/parts are changed while the lock mechanism 70 is unlocking the traveling manipulation levers 36.
- expressions about directions such as “parallel” and “vertical”, mean not only states strictly and literally defined by the expressions but also states that vary from the literally defined states by several degrees (e.g., "substantially parallel” and “substantially vertical”).
- the steering box 50 has, in its upper rear portion, an inclined surface 52.
- the inclined surface 52 is a surface inclined so that it becomes higher as it gets closer to the front.
- the inclined surface 52 includes, e.g., a notification lamp for notifying an abnormality and/or the like of a battery and a counter indicating cumulative work time.
- the inclined surface 52 also includes, in its center in the left-right direction, two lever insertion holes 53 arranged side by side in the left-right direction.
- the two traveling manipulation levers 36 are inserted into the two lever insertion holes 53, respectively. Namely, the traveling manipulation levers 36 are disposed to penetrate through the exterior member (housing) of the steering box 50.
- the steering box 50 internally includes a rotating shaft 91 and a plurality of rotating tubes 92.
- the rotating shaft 91 is a thin elongated cylindrical member, and is arranged such that its axial direction (longitudinal direction) is in parallel with the left-right direction.
- Each of the rotating tubes 92 is a tubular member attached to the rotating shaft 91 such that the rotating tube 92 is rotatable relative to the rotating shaft 91.
- the rotating tubes 92 are arranged side by side along the axial direction of the rotating shaft 91.
- the two traveling manipulation levers 36 are welded to their respective rotating tubes 92. With this configuration, when one of the traveling manipulation levers 36 is manipulated, a corresponding one of the rotating tubes 92 solely rotates.
- a power transmission member (not illustrated) is attached to the rotating tubes 92.
- the power transmission member is configured to transmit power generated by rotation of the rotating tube 92 to the direction selector valve unit 38, thereby causing displacement of the above-described spools.
- portions of the traveling manipulation levers 36 which portions are inside the steering box 50 are curved.
- major portions of the traveling manipulation levers 36 are linear.
- the expression "longitudinal direction(s) of the traveling manipulation lever(s) 36" or the like refers to a longitudinal direction(s) of the major portion(s) of the traveling manipulation lever(s) 36 (which portion(s) is/are outside the steering box 50).
- a “lever longitudinal direction” refers to a longitudinal direction(s) of the traveling manipulation lever(s) 36 being at a neutral position (i.e., a longitudinal direction(s) of the traveling manipulation lever(s) 36 giving an instruction for the crawler traveling device(s) 21 to stop).
- the lever longitudinal direction is slant relative to a top-bottom direction.
- a side close to an upper side in the lever longitudinal direction may be referred to as “upper side/upward in the lever longitudinal direction", occasionally.
- the lock mechanism 70 is configured to lock the traveling manipulation levers 36 (i.e., to inhibit manipulation of the traveling manipulation levers 36) by restricting tilting of the traveling manipulation levers 36 in a front-rear direction.
- the lock mechanism 70 includes a hydraulic cylinder (driving unit) 71, a transmission unit 72, and a lock plate 78.
- the parts/members constituting the lock mechanism 70 are supported by a stay 80.
- the stay 80 includes a cylinder support 81 for supporting the hydraulic cylinder 71, a frame attachment part 82 that is to be attached to a frame included in the steering box 50, and a rotation shaft support 83 for supporting a first rotation shaft 75 and a second rotation shaft 79 (described later).
- the hydraulic cylinder 71 is a driving unit configured to generate drive power with operating oil supplied thereto through a hydraulic hose 93 and a first end of the hydraulic cylinder 71.
- the hydraulic cylinder 71 is a thin elongated cylinder, and includes a main body 71a and a movable part 71b.
- the main body 71a and the movable part 71b are arranged such that their longitudinal directions are in parallel with the lever longitudinal direction.
- the movable part 71b is provided to a second end (an upper end in the lever longitudinal direction) of the main body 71a.
- the movable part 71b is linearly movable relative to the main body 71a in the lever longitudinal direction.
- the hydraulic cylinder 71 is provided with a spring (biasing member), which is not illustrated.
- a spring biasing member
- the main body 71a In a state where operating oil is not supplied to the hydraulic cylinder 71, the main body 71a is positioned downward in the lever longitudinal direction by the biasing force of the spring.
- the movable part 71b When operating oil is supplied to the hydraulic cylinder 71, the movable part 71b is pushed by a force greater than the biasing force of the spring, so that the movable part 71b moves upward in the lever longitudinal direction.
- the contact members are in contact with the contact sensors in the console boxes 60, operating oil is supplied to the hydraulic cylinder 71. Meanwhile, when the contact members are separated from the contact sensors in the console boxes 60 (namely, at a timing when the console boxes 60 start turning rearward from the normal posture), the supply of the operating oil is stopped.
- the transmission unit 72 transmits the drive power generated by the hydraulic cylinder 71 (i.e., the linear motion in the lever longitudinal direction of the movable part 71b), thereby causing the lock plate 78 to turn around a turning axis extending in the lever longitudinal direction.
- the transmission unit 72 includes a link arm 73, a link plate 74, the first rotation shaft 75, a ball joint 76, and a turning plate 77.
- the link arm 73 is fixed to the movable part 71b such that the link arm 73 is movable together with the movable part 71b.
- the link arm 73 is arranged such that its longitudinal direction is in parallel with the lever longitudinal direction.
- the link arm 73 has a first end (a lower end in the lever longitudinal direction) fixed to the movable part 71b.
- the link arm 73 has a second end (an upper end in the lever longitudinal direction) turnably attached to the link plate 74.
- the link plate 74 is arranged such that its thickness direction is in parallel with the left-right direction.
- the link plate 74 is supported by the rotation shaft support 83 such that the link plate 74 is turnable around a turning axis that is the first rotation shaft 75 (around a turning axis extending in the left-right direction).
- the link plate 74 has a front end (a first end) to which the link arm 73 is turnably attached in the above-described manner, and the link plate 74 has a rear end (a second end) to which the ball joint 76 is turnably attached.
- the ball joint 76 is attached to the rear end (the first end) of the link plate 74 such that the ball joint 76 is turnable around a turning axis extending in the left-right direction.
- the ball joint 76 is attached to a front end (a first end) of the turning plate 77 such that the ball joint 76 is turnable around a turning axis extending in the lever longitudinal direction.
- the ball joint 76 allows drive power to be transmitted between two members (the link plate 74 and the turning plate 77) whose turning axes extend in different directions.
- the turning plate 77 is arranged such that its thickness direction is in parallel with the lever longitudinal direction.
- the turning plate 77 is supported by the rotation shaft support 83 such that the turning plate 77 is turnable around a turning axis that is the second rotation shaft 79 (i.e., around a turning axis extending in the lever longitudinal direction).
- the lock plate 78 is fixed to the turning plate 77.
- the turning plate 77 and the lock plate 78 turn together.
- each of the turning plate 77 and the lock plate 78 is configured such that its thickness direction and its turning axis are in parallel with each other, each of the turning plate 77 and the lock plate 78 turns in a single plane, and thus turns with a small turning trajectory.
- the lock plate 78 comes closer to the traveling manipulation levers 36 by substantially the shortest distance. Also because of this, the lock plate 78 can turn with a small turning trajectory. Consequently, the lock mechanism 70 can be accommodated in a space-saving manner.
- the hydraulic hose 93 can be made shorter.
- the lock plate 78 has a first arm 78a and a second arm 78b, each of which extends to be away from the second rotation shaft 79. A space between the first arm 78a and the second arm 78b is expressed as a gap 78c.
- the lock plate 78 includes a connecting part 78d via which the first arm 78a and the second arm 78b are connected with each other.
- the first arm 78a and the second arm 78b may be independent members separated from each other.
- the traveling manipulation lever 36 on the left side is positioned in the gap 78c between the first arm 78a and the second arm 78b.
- the traveling manipulation lever 36 on the right side is positioned on the right of the second arm 78b.
- the first arm 78a has a first recess 78e in its right side (a side close to the second arm 78b, a side close to the gap 78c, an inner portion of the lock plate 78, a side close to the traveling manipulation lever 36 on the left side).
- the second arm 78b has a second recess 78f in its right side (a side away from the first arm 78a, a side away from the gap 78c, an outer portion of the lock plate 78, a side close to the traveling manipulation lever 36 on the right side).
- the ball joint 76 can move linearly to make the rear end of the ball joint 76, the turning plate 77, and the lock plate 78 turn together around the turning axis extending in the lever longitudinal direction. This can cause the lock plate 78 to turn to move between a lock position and a release position. When the lock plate 78 turns clockwise in a top view, the lock plate 78 is shifted from the lock position to the release position.
- the lock plate 78 is at the lock position. While the lock plate 78 is at the lock position, the traveling manipulation levers 36 are respectively accommodated in the first recess 78e and the second recess 78b to restrict tilting of the traveling manipulation levers 36 in the front-rear direction. Thus, it is possible to lock the traveling manipulation levers 36 while the operator is getting in or off the work vehicle, for example.
- the lock plate 78 is at the release position. While the lock plate 78 is at the release position, the traveling manipulation levers 36 are outside the first recess 78e and the second recess 78b. In the gap 78c, the traveling manipulation lever 36 on the left side can be tilted in the front-rear direction.
- the gap 78c is set to have a length in the front-rear direction that does not allow the traveling manipulation lever 36 to come into contact with the lock plate 78 even when the traveling manipulation lever 36 is tilted to the foremost position. Since the traveling manipulation lever 36 on the right side does not overlap the lock plate 78 in the left-right direction, the traveling manipulation lever 36 on the right side can be tilted in the front-rear direction.
- the revolving work vehicle 1 of the present embodiment includes the lower traveling body 11, the two traveling manipulation levers 36, and the lock mechanism 70.
- the lock mechanism 70 is capable of restricting tilting of the two traveling manipulation levers 36 in the front-rear direction.
- the lock mechanism 70 includes the hydraulic cylinder 71, the transmission unit 72, and the lock plate 78.
- the hydraulic cylinder 71 is configured to generate drive power.
- the transmission unit 72 is configured to transmit the drive power generated by the hydraulic cylinder 71.
- the lock plate 78 is a plate-shaped member.
- the lock plate 78 has a thickness direction being in parallel with the longitudinal directions of the traveling manipulation levers 36 positioned at the neutral position.
- the lock plate 78 has the first recess 78e and the second recess 78f.
- the drive power transmitted via the transmission unit 72 causes the lock plate 78 to turn around a turning axis being in parallel with the longitudinal directions of the traveling manipulation levers 36 being at the neutral position to change the position of the lock plate 78 between the lock position, where the two traveling manipulation levers 36 are respectively accommodated in the first recess 78e and the second recess 78f to restrict the tilting of the traveling manipulation levers 36 in the front-rear direction, and the release position, where the two traveling manipulation levers 36 are outside the first recess 78e and the second recess 78f.
- This configuration restricts movement of the traveling manipulation levers 36 themselves, rather than tilting of an additional member attached to the bases of the traveling manipulation levers 36. This expands the range in which the lock mechanism 70 can be attached, thereby making it possible to enhance the flexibility in designing. In addition, this configuration does not need the additional member attached to the traveling manipulation levers 36, and therefore can be simplified. Furthermore, since the lock plate 78 has the thickness direction being in parallel with the longitudinal directions of the traveling manipulation levers 36 being at the neutral position and the lock plate 78 is configured to turn around the turning axis extending in the longitudinal direction, the lock plate 78 can turn with a small turning trajectory. Therefore, the lock mechanism 70 can be accommodated in a small space.
- the hydraulic cylinder 71 includes the movable part 71b, which is configured to perform a linear motion to generate drive power.
- the transmission unit 72 converts the linear motion of the movable part 71b into a turning motion around the turning axis being in parallel with the longitudinal directions of the traveling manipulation levers 36 being at the neutral position to cause the lock plate 78 to turn.
- the direction in which the movable part 71b performs the linear motion is in parallel with the longitudinal directions of the traveling manipulation levers 36 being at the neutral position.
- the revolving work vehicle 1 of the present embodiment includes the work manipulation levers 61 and the console boxes 60.
- the work manipulation levers 61 are respectively disposed on the left and right sides of the driver's seat 39, and are usable for manipulation of at least the work device 13.
- the console boxes 60 are respectively provided with the work manipulation levers 61.
- the console boxes 60 are turnable together with the work manipulation levers 61 around the turning axis extending in the left-right direction.
- the lock mechanism 70 starts restricting the tilting of the two traveling manipulation levers 36.
- the revolving work vehicle 1 of the present embodiment has the following features. That is, the revolving work vehicle 1 includes the driver's seat 39 and the floor. On the driver's seat 39, the operator can sit. On the floor, the operator sitting on the driver's seat 39 can place his/her feet.
- the revolving work vehicle 1 includes the steering box 50.
- the steering box 50 is disposed so as to protrude upward from a portion of the floor which portion is in front of the driver's seat 39.
- the steering box 50 internally includes the direction selector valve unit 38 made of the plurality of direction selector valves capable of changing the feeding direction of operating oil from one to another.
- the two traveling manipulation levers 36 are disposed in the steering box 50.
- the lock mechanism 70 is disposed inside the steering box 50.
- the effect of the present invention of making it possible for the lock mechanism 70 to be accommodated in a small space is more effective. Also in view of the fact that the configuration in which the steering box 50 is disposed in front of the driver's seat 39 is often applied to small revolving work vehicles 1, such as those described in the present embodiment, the effect of the present invention is more effective.
- the direction in which the lock plate 78 turns to unlock the traveling manipulation levers 36 may alternatively be reverse to that of the above-described embodiment (i.e., a counterclockwise direction in a top view).
- the direction of the power generated by the hydraulic cylinder 71 may not be in parallel with the lever longitudinal direction, and may alternatively be perpendicular to the lever longitudinal direction, for example.
- the console boxes 60 are caused to turn rearward together with the work manipulation levers 61 to disable operation of the work manipulation levers 61 for giving an instruction to the work device 13 and/or the like.
- This configuration may be replaced by a configuration including an additional lever used to inhibit the work manipulation levers 61 from giving an instruction to the work device and/or the like (i.e., a configuration not allowing the console boxes 60 to turn when the operator gets in or off the work vehicle).
- the hydraulic cylinder 71 is employed as the driving unit of the lock mechanism.
- a driving unit configured in a different manner may be employed.
- the driving unit may be a cylinder configured to generate drive power upon receipt of fluid (e.g., air) that is not operating oil.
- the driving unit may be a driving unit (e.g., a solenoid) configured to generate drive power depending on the presence or absence of an electric signal or an electric current.
- features of the present invention may be applied to other work vehicles (e.g., construction machines for civil engineering work, construction work, and the like) as long as they include two traveling manipulation levers used to give an instruction on traveling, for example.
- work vehicles e.g., construction machines for civil engineering work, construction work, and the like
- two traveling manipulation levers used to give an instruction on traveling, for example.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Operation Control Of Excavators (AREA)
- Mechanical Control Devices (AREA)
- Component Parts Of Construction Machinery (AREA)
- Non-Deflectable Wheels, Steering Of Trailers, Or Other Steering (AREA)
Description
- The present invention relates mainly to a work vehicle including a lock mechanism for locking a traveling manipulation lever.
- There has been known a work vehicle including: a traveling manipulation lever that is to be tilted to give an instruction on traveling of the work vehicle; and a lock mechanism configured to restrict the tilting of the traveling manipulation lever to lock the traveling manipulation lever.
Patent Literatures 1 and 2 (hereinafter, referred to asPTLs 1 and 2, respectively) disclose this type of work vehicle. -
PTL 1 discloses a traveling work machine including two traveling manipulation levers and fixing mechanisms. The two traveling manipulation levers are disposed in a standing manner in a portion of a machine base which portion is in front of a driver's seat. The two traveling manipulation levers have bases provided with actuating members configured to turn together with the traveling manipulation levers, respectively. The actuating members have respective latched pins. The fixing mechanisms include respective fixing pieces that are movable linearly. Each of the fixing pieces has an engagement recess. By causing the fixing piece to move linearly to have its engagement recess engage with the latched pin, the traveling manipulation lever is locked. - PTL 2 discloses a small hydraulic excavator including two traveling manipulation levers and a traveling lock device. The two traveling manipulation levers are turnable about turning axes that are two tubes disposed below a floor, on which a driver's seat is mounted. The tubes (i.e., portions close to the bases of the traveling manipulation levers) have protruding parts that protrude from the tubes, respectively. The traveling lock device includes a lock plate and a hydraulic cylinder. The lock plate is disposed perpendicularly to the floor. The lock plate has a plurality of grooves. The hydraulic cylinder causes linear movement of the lock plate. As a result of the linear movement of the lock plate, the protruding parts of the tubes are inserted into the grooves of the lock plate, whereby the traveling manipulation levers are locked.
-
- PTL 1:
Japanese Patent Application Laid-Open No. H8(1996)-284212 - PTL 2:
Japanese Patent Application Laid-Open No. 2016-141934 - According to
PTLs 1 and 2, the traveling manipulation lever is locked by restricting movement of an additional member disposed at a location close to the base of the traveling manipulation lever. In order to achieve this, the fixing mechanism or the traveling lock device needs to be disposed at a location close to the base of the traveling manipulation lever. This impairs the flexibility in designing. -
PTLs 1 and 2 also disclose that the fixing mechanism/the traveling lock device can be disposed in a space-saving manner. However, althoughPTLs 1 and 2 disclose the configuration in which the fixing piece/the lock plate moves linearly,PTLs 1 and 2 fail to disclose any space-saving configuration other than this. - Some aspects of the present invention were made in view of the circumstances described above. A main object of some aspects of the present invention is to provide, to a work vehicle, a lock mechanism for locking a traveling manipulation lever, the lock mechanism having excellent flexibility in designing and being allowed to be mounted in a space-saving manner.
- The problem to be solved by the present invention has been described above. Next, the following will describe solutions to this problem and effects achieved by the solutions.
- According to the present invention, a hydraulic excavator having the following features is provided. That is, the hydraulic excavator includes a traveling body, two traveling manipulation levers, and a lock mechanism. The traveling manipulation levers are configured to be tilted in a front-rear direction to give an instruction on traveling of the traveling body. The lock mechanism is capable of restricting the tilting of the two traveling manipulation levers in the front-rear direction. The lock mechanism includes a driving unit, a transmission unit, and a lock plate. The driving unit is configured to generate drive power. The transmission unit is configured to transmit the drive power generated by the driving unit. The lock plate is a plate-shaped member. The lock plate has a thickness direction being in parallel with longitudinal directions of the traveling manipulation levers positioned at a neutral position. The lock plate has a first recess and a second recess. The drive power transmitted via the transmission unit causes the lock plate to turn about a turning axis being in parallel with the longitudinal directions of the traveling manipulation levers being at the neutral position to change a position of the lock plate between a lock position, where the two traveling manipulation levers are respectively accommodated in the first recess and the second recess to restrict the tilting of the traveling manipulation levers in the front-rear direction, and a release position, where the two traveling manipulation levers are outside the first recess and the second recess.
- This configuration restricts movement of the traveling manipulation levers themselves, rather than movement of an additional member attached to the base of the traveling manipulation lever. This expands the range in which the lock mechanism can be attached, thereby making it possible to enhance the flexibility in designing. In addition, this configuration does not need the additional member attached to the traveling manipulation lever, and therefore can be simplified. Furthermore, since the lock plate has the thickness direction being in parallel with the longitudinal directions of the traveling manipulation levers being at the neutral position and the lock plate is configured to turn around the turning axis extending in the longitudinal direction, the lock plate can turn with a small turning trajectory. Therefore, the lock mechanism can be accommodated in a small space.
- The hydraulic excavator described above preferably includes the following features. That is, the driving unit includes a movable part, which is configured to perform a linear motion to generate the drive power. The transmission unit converts the linear motion of the movable part into a turning motion around a turning axis being in parallel with the longitudinal directions of the traveling manipulation levers being at the neutral position to cause the lock plate to turn. The direction in which the movable part performs the linear motion is in parallel with the longitudinal directions of the traveling manipulation levers being at the neutral position.
- Thus, the direction of the movable part performs the linear motion is in parallel with both of the longitudinal directions of the traveling manipulation levers being at the neutral position and the direction of the turning axis of the lock plate, and therefore it is possible to simplify the configuration of the transmission unit and to downsize the transmission unit.
- The hydraulic excavator described above preferably includes the following features. That is, the hydraulic excavator includes work manipulation levers and console boxes. The work manipulation levers are respectively disposed on the left and right sides of the driver's seat, and the work manipulation levers are usable for manipulation of at least a work device. The console boxes are respectively provided with the work manipulation levers, and the console boxes are turnable together with the work manipulation levers around a turning axis extending in a left-right direction. At a timing when the work manipulation levers and the console boxes start turning rearward from the normal posture, where work with the work device is to be performed, the lock mechanism starts restricting the tilting of the two traveling manipulation levers.
- With this configuration, it is possible to lock the traveling manipulation levers at the timing when the work manipulation levers and the console boxes start turning rearward (i.e., at an early timing). In addition, in view of the fact that the configuration in which the work manipulation levers and the console boxes turn together is often applied to small revolving work vehicles, the effect of the present invention of making it possible for the lock mechanism to be accommodated in a small space is more effective.
- The hydraulic excavator described above preferably includes the following features. That is, the hydraulic excavator includes a driver's seat and a floor. On the driver's seat, the operator can sit. On the floor, the operator sitting on the driver's seat can place his/her feet. The hydraulic excavator includes a steering box. The steering box is disposed so as to protrude upward from a portion of the floor which portion is in front of the driver's seat, and the steering box internally includes a direction selector valve unit made of a plurality of direction selector valves capable of changing a feeding direction of operating oil from one to another. The two traveling manipulation levers are disposed in the steering box. The steering box internally includes the lock mechanism.
- In view of the fact that the space inside the steering box tends to be limited due to the direction selector valve unit disposed inside the steering box, the effect of the present invention of making it possible for the lock mechanism to be accommodated in a small space is more effective. Also in view of the fact that the configuration in which the steering box is disposed in front of the driver's seat is often applied to small work vehicles, the effect of the present invention is more effective.
-
- [
FIG. 1 ] A perspective view illustrating an overall structure of a revolving work vehicle according to one embodiment of the present invention. - [
FIG. 2 ] A side view of the revolving work vehicle. - [
FIG. 3 ] A perspective view illustrating a configuration of a lock mechanism. - [
FIG. 4 ] A side view illustrating how positions of members/parts are changed while the lock mechanism is unlocking traveling manipulation levers. - [
FIG. 5 ] A plan view illustrating how the positions of the members/parts are changed while the lock mechanism is unlocking the traveling manipulation levers. - The following will describe embodiments of the present invention with reference to the drawings.
FIG. 1 is a perspective view illustrating an overall structure of a revolvingwork vehicle 1 according to one embodiment of the present invention.FIG. 2 is a side view illustrating the revolvingwork vehicle 1. - The revolving work vehicle (work vehicle) 1 of the present embodiment illustrated in
FIGs. 1 and2 includes a lower traveling body (traveling body) 11 and an upper revolvingbody 12. - The
lower traveling body 11 includes left and right pairedcrawler traveling devices 21 and hydraulic motors (not illustrated) configured to drive thecrawler traveling devices 21. By individually driving the left and rightcrawler traveling devices 21 in various directions at various speeds, it is possible to drive the lower travelingbody 11 so that the lower travelingbody 11 travels in various ways, e.g., travel straight forward or backward or make a turn. - The upper revolving
body 12 includes a revolvingframe 31, anengine hood 32, anengine 33, ahydraulic pump unit 34, awork device 13, and asteering unit 35. - The revolving
frame 31 is disposed above the lower travelingbody 11. The revolvingframe 31 is supported by the lower travelingbody 11 such that the revolvingframe 31 is turnable about an axis perpendicular to a horizontal plane. By a revolving motor (not illustrated), the revolvingframe 31 can be driven to turn relative to the lower travelingbody 11. Theengine hood 32 is disposed in a rear portion of the revolvingframe 31. Inside theengine hood 32, theengine 33 is disposed. Theengine 33 is a diesel engine, for example. Thehydraulic pump unit 34 is driven by theengine 33 to generate hydraulic force that the revolvingwork vehicle 1 requires to travel and to perform work. - The
work device 13 includes aboom 41, anarm 42, abucket 43, and a blade (earth removing blade) 44. Theboom 41, thearm 42, thebucket 43, and theblade 44 are respectively coupled to hydraulic cylinders. By extending and retracting these hydraulic cylinders with the hydraulic force generated by thehydraulic pump unit 34, it is possible to cause theboom 41 and thearm 42 to turn to change their positions, to cause thebucket 43 to perform work such as excavation work, and/or to cause theblade 44 to turn up and down. - The
steering unit 35 includes various manipulation members disposed in a space around a driver'sseat 39, on which an operator can sit. The manipulation members are mainly disposed in thesteering box 50 andconsole boxes 60. The expressions "front", "rear", "left", and "right" in the following description respectively mean the front, rear, left, and right for the operator sitting on the driver'sseat 39 in a state where both of the lower travelingbody 11 and the upper revolvingbody 12 face the front. - The
steering box 50 is disposed in front of the driver'sseat 39 such that thesteering box 50 extends upward from afloor 25, on which the operator sitting on the driver'sseat 39 can place his/her feet. Thesteering box 50 is provided with traveling manipulation levers 36 used to give an instruction on traveling of the revolvingwork vehicle 1 and ablade manipulation lever 37 used to give an instruction on lifting/lowering of theblade 44, for example. - The traveling manipulation levers 36 are disposed so as to extend upward (specifically, obliquely rearward and upward) from the
steering box 50. The traveling manipulation levers 36 are provided in a pair on the left and right sides. By manipulating the travelingmanipulation lever 36 on the left side, it is possible to give an instruction to thecrawler traveling device 21 on the left side. Meanwhile, by manipulating the travelingmanipulation lever 36 on the right side, it is possible to give an instruction to thecrawler traveling device 21 on the right side. By tilting the traveling manipulation levers 36 forward, it is possible to cause thecrawler traveling devices 21 to travel forward. By tilting the traveling manipulation levers 36 rearward, it is possible to cause thecrawler traveling devices 21 to travel backward. By positioning the traveling manipulation levers 36 at a neutral position, it is possible to stop thecrawler traveling devices 21. - As illustrated in
FIG. 2 , thesteering box 50 internally includes a directionselector valve unit 38. The directionselector valve unit 38 includes a plurality of direction selector valves for driving or stopping the hydraulic actuators of the revolvingwork vehicle 1 and the like. The direction selector valves include respective spools. Manipulation of the manipulation members causes displacement of the spools to drive thecrawler traveling devices 21, the revolving motor, thework device 13, and the like. - The left and right paired
console boxes 60 are disposed to sandwich the driver'sseat 39. The driver'sseat 39 and theconsole boxes 60 are disposed on an upper surface of theengine hood 32 of the upper revolvingbody 12. The structures of the left andright console boxes 60 are symmetric to each other, and thus are substantially identical to each other. The left andright console boxes 60 are each provided with awork manipulation lever 61 and alock lever 62. - The
console boxes 60 are supported turnably around a turning axis extending in a left-right direction, relative to brackets (not illustrated) fixed on the upper surface of theengine hood 32. Since the work manipulation levers 61 and the lock levers 62 are attached to theconsole boxes 60, the work manipulation levers 61 and the lock levers 62 turn together with theconsole boxes 60. Thus, as illustrated inFIG. 2 , the postures of theconsole boxes 60 can be changed between a normal posture, which is indicated by the solid lines, and a retracted posture, which is indicated by the two-dot chain lines. - The operator on the revolving
work vehicle 1 manipulates the work manipulation levers 61 after setting theconsole boxes 60 in the normal posture. Meanwhile, when the operator is to get on or off the revolvingwork vehicle 1, the operator sets the console box(es) 60 in the retracted posture so that the operator's body is not interfered with by the console box(es) 60. - While the
console boxes 60 are in the normal posture, the work manipulation levers 61 extend upward (specifically, obliquely forward and upward) from upper portions of theconsole boxes 60. The work manipulation levers 61 are levers used to give an instruction on revolving of the upper revolvingbody 12 and instructions on driving of theboom 41, thearm 42, and thebucket 43. - While the
console boxes 60 are in the retracted posture, thelock lever 62 extends obliquely forward and upward from front portions of theconsole boxes 60. Both in a case where theconsole boxes 60 are in the normal posture and in a case where theconsole boxes 60 are in the retracted posture, turning of theconsole boxes 60 is restricted by a restriction mechanism (not illustrated). By turning the lock levers 62, it is possible to release the restriction by the restriction mechanism, thereby permitting turning of theconsole boxes 60. - The
console boxes 60 are each provided with a contact sensor and a contact member (each not illustrated). While theconsole boxes 60 are in the normal posture, the contact members are in contact with the contact sensors. At a timing when theconsole boxes 60 start turning rearward from the normal posture, the contact members are separated from the contact sensors. When the contact members are not in contact with the contact sensors, a solenoid valve (not illustrated) and/or the like is closed. Consequently, operating oil supply according to manipulation of the work manipulation levers 61 is interrupted, and accordingly manipulation of the work manipulation levers 61 is disabled. Furthermore, a lock mechanism 70 (described later) is actuated to lock the traveling manipulation levers 36. - Next, with reference to
FIGs. 3 to 5 , the following will describe thelock mechanism 70 configured to lock the work manipulation levers 61.FIG. 3 is a perspective view illustrating a configuration of thelock mechanism 70.FIGs. 4 and5 are a side view and a plan view illustrating how the positions of the members/parts are changed while thelock mechanism 70 is unlocking the traveling manipulation levers 36. In the following description, expressions about directions, such as "parallel" and "vertical", mean not only states strictly and literally defined by the expressions but also states that vary from the literally defined states by several degrees (e.g., "substantially parallel" and "substantially vertical"). - As illustrated in
FIG. 3 , thesteering box 50 has, in its upper rear portion, aninclined surface 52. Theinclined surface 52 is a surface inclined so that it becomes higher as it gets closer to the front. Theinclined surface 52 includes, e.g., a notification lamp for notifying an abnormality and/or the like of a battery and a counter indicating cumulative work time. Theinclined surface 52 also includes, in its center in the left-right direction, two lever insertion holes 53 arranged side by side in the left-right direction. The two traveling manipulation levers 36 are inserted into the two lever insertion holes 53, respectively. Namely, the traveling manipulation levers 36 are disposed to penetrate through the exterior member (housing) of thesteering box 50. - The
steering box 50 internally includes arotating shaft 91 and a plurality ofrotating tubes 92. The rotatingshaft 91 is a thin elongated cylindrical member, and is arranged such that its axial direction (longitudinal direction) is in parallel with the left-right direction. Each of therotating tubes 92 is a tubular member attached to therotating shaft 91 such that therotating tube 92 is rotatable relative to therotating shaft 91. Therotating tubes 92 are arranged side by side along the axial direction of therotating shaft 91. The two traveling manipulation levers 36 are welded to their respectiverotating tubes 92. With this configuration, when one of the traveling manipulation levers 36 is manipulated, a corresponding one of therotating tubes 92 solely rotates. To therotating tubes 92, a power transmission member (not illustrated) is attached. The power transmission member is configured to transmit power generated by rotation of therotating tube 92 to the directionselector valve unit 38, thereby causing displacement of the above-described spools. - As illustrated in, e.g.,
FIG. 3 , portions of the traveling manipulation levers 36 which portions are inside thesteering box 50 are curved. However, major portions of the traveling manipulation levers 36 (which portions are outside the steering box 50) are linear. Thus, the expression "longitudinal direction(s) of the traveling manipulation lever(s) 36" or the like refers to a longitudinal direction(s) of the major portion(s) of the traveling manipulation lever(s) 36 (which portion(s) is/are outside the steering box 50). In the following description, a "lever longitudinal direction" refers to a longitudinal direction(s) of the traveling manipulation lever(s) 36 being at a neutral position (i.e., a longitudinal direction(s) of the traveling manipulation lever(s) 36 giving an instruction for the crawler traveling device(s) 21 to stop). As is clear from the above description, the lever longitudinal direction is slant relative to a top-bottom direction. However, a side close to an upper side in the lever longitudinal direction may be referred to as "upper side/upward in the lever longitudinal direction", occasionally. - The
lock mechanism 70 is configured to lock the traveling manipulation levers 36 (i.e., to inhibit manipulation of the traveling manipulation levers 36) by restricting tilting of the traveling manipulation levers 36 in a front-rear direction. As illustrated inFIG. 3 , thelock mechanism 70 includes a hydraulic cylinder (driving unit) 71, atransmission unit 72, and alock plate 78. The parts/members constituting thelock mechanism 70 are supported by astay 80. Thestay 80 includes acylinder support 81 for supporting thehydraulic cylinder 71, aframe attachment part 82 that is to be attached to a frame included in thesteering box 50, and arotation shaft support 83 for supporting afirst rotation shaft 75 and a second rotation shaft 79 (described later). - The
hydraulic cylinder 71 is a driving unit configured to generate drive power with operating oil supplied thereto through ahydraulic hose 93 and a first end of thehydraulic cylinder 71. Thehydraulic cylinder 71 is a thin elongated cylinder, and includes a main body 71a and amovable part 71b. The main body 71a and themovable part 71b are arranged such that their longitudinal directions are in parallel with the lever longitudinal direction. Themovable part 71b is provided to a second end (an upper end in the lever longitudinal direction) of the main body 71a. Themovable part 71b is linearly movable relative to the main body 71a in the lever longitudinal direction. - The
hydraulic cylinder 71 is provided with a spring (biasing member), which is not illustrated. In a state where operating oil is not supplied to thehydraulic cylinder 71, the main body 71a is positioned downward in the lever longitudinal direction by the biasing force of the spring. When operating oil is supplied to thehydraulic cylinder 71, themovable part 71b is pushed by a force greater than the biasing force of the spring, so that themovable part 71b moves upward in the lever longitudinal direction. While the contact members are in contact with the contact sensors in theconsole boxes 60, operating oil is supplied to thehydraulic cylinder 71. Meanwhile, when the contact members are separated from the contact sensors in the console boxes 60 (namely, at a timing when theconsole boxes 60 start turning rearward from the normal posture), the supply of the operating oil is stopped. - The
transmission unit 72 transmits the drive power generated by the hydraulic cylinder 71 (i.e., the linear motion in the lever longitudinal direction of themovable part 71b), thereby causing thelock plate 78 to turn around a turning axis extending in the lever longitudinal direction. As illustrated inFIG. 3 , thetransmission unit 72 includes alink arm 73, alink plate 74, thefirst rotation shaft 75, a ball joint 76, and a turningplate 77. - The
link arm 73 is fixed to themovable part 71b such that thelink arm 73 is movable together with themovable part 71b. Thelink arm 73 is arranged such that its longitudinal direction is in parallel with the lever longitudinal direction. Thelink arm 73 has a first end (a lower end in the lever longitudinal direction) fixed to themovable part 71b. Thelink arm 73 has a second end (an upper end in the lever longitudinal direction) turnably attached to thelink plate 74. - The
link plate 74 is arranged such that its thickness direction is in parallel with the left-right direction. Thelink plate 74 is supported by therotation shaft support 83 such that thelink plate 74 is turnable around a turning axis that is the first rotation shaft 75 (around a turning axis extending in the left-right direction). Thelink plate 74 has a front end (a first end) to which thelink arm 73 is turnably attached in the above-described manner, and thelink plate 74 has a rear end (a second end) to which the ball joint 76 is turnably attached. - With the configuration described above, when operating oil is supplied to the
hydraulic cylinder 71 and accordingly themovable part 71b moves upward linearly in the lever longitudinal direction, thelink plate 74 turns, as illustrated inFIG. 4 . Consequently, the ball joint 76, which is attached to thelink plate 74, moves linearly substantially forward. - As described above, the ball joint 76 is attached to the rear end (the first end) of the
link plate 74 such that the ball joint 76 is turnable around a turning axis extending in the left-right direction. The ball joint 76 is attached to a front end (a first end) of the turningplate 77 such that the ball joint 76 is turnable around a turning axis extending in the lever longitudinal direction. With this configuration, the ball joint 76 allows drive power to be transmitted between two members (thelink plate 74 and the turning plate 77) whose turning axes extend in different directions. - The turning
plate 77 is arranged such that its thickness direction is in parallel with the lever longitudinal direction. The turningplate 77 is supported by therotation shaft support 83 such that the turningplate 77 is turnable around a turning axis that is the second rotation shaft 79 (i.e., around a turning axis extending in the lever longitudinal direction). To the turningplate 77, thelock plate 78 is fixed. Thus, the turningplate 77 and thelock plate 78 turn together. - Since each of the turning
plate 77 and thelock plate 78 is configured such that its thickness direction and its turning axis are in parallel with each other, each of the turningplate 77 and thelock plate 78 turns in a single plane, and thus turns with a small turning trajectory. In addition, since the turning axis of thelock plate 78 is in parallel with the lever longitudinal direction, thelock plate 78 comes closer to the traveling manipulation levers 36 by substantially the shortest distance. Also because of this, thelock plate 78 can turn with a small turning trajectory. Consequently, thelock mechanism 70 can be accommodated in a space-saving manner. In addition, thanks to the configuration in which the directionselector valve unit 38 is disposed in thesteering box 50 and operating oil is supplied from the directionselector valve unit 38 to thehydraulic cylinder 71, thehydraulic hose 93 can be made shorter. - The
lock plate 78 has afirst arm 78a and asecond arm 78b, each of which extends to be away from thesecond rotation shaft 79. A space between thefirst arm 78a and thesecond arm 78b is expressed as agap 78c. In the present embodiment, thelock plate 78 includes a connectingpart 78d via which thefirst arm 78a and thesecond arm 78b are connected with each other. Alternatively, thefirst arm 78a and thesecond arm 78b may be independent members separated from each other. - The traveling
manipulation lever 36 on the left side is positioned in thegap 78c between thefirst arm 78a and thesecond arm 78b. The travelingmanipulation lever 36 on the right side is positioned on the right of thesecond arm 78b. Thefirst arm 78a has afirst recess 78e in its right side (a side close to thesecond arm 78b, a side close to thegap 78c, an inner portion of thelock plate 78, a side close to the travelingmanipulation lever 36 on the left side). Thesecond arm 78b has asecond recess 78f in its right side (a side away from thefirst arm 78a, a side away from thegap 78c, an outer portion of thelock plate 78, a side close to the travelingmanipulation lever 36 on the right side). - As illustrated in
FIG. 5 , the ball joint 76 can move linearly to make the rear end of the ball joint 76, the turningplate 77, and thelock plate 78 turn together around the turning axis extending in the lever longitudinal direction. This can cause thelock plate 78 to turn to move between a lock position and a release position. When thelock plate 78 turns clockwise in a top view, thelock plate 78 is shifted from the lock position to the release position. - Specifically, in a state where operating oil is not supplied to the
hydraulic cylinder 71, thelock plate 78 is at the lock position. While thelock plate 78 is at the lock position, the traveling manipulation levers 36 are respectively accommodated in thefirst recess 78e and thesecond recess 78b to restrict tilting of the traveling manipulation levers 36 in the front-rear direction. Thus, it is possible to lock the traveling manipulation levers 36 while the operator is getting in or off the work vehicle, for example. - Meanwhile, in a state where operating oil is supplied to the
hydraulic cylinder 71, thelock plate 78 is at the release position. While thelock plate 78 is at the release position, the traveling manipulation levers 36 are outside thefirst recess 78e and thesecond recess 78b. In thegap 78c, the travelingmanipulation lever 36 on the left side can be tilted in the front-rear direction. Thus, thegap 78c is set to have a length in the front-rear direction that does not allow the travelingmanipulation lever 36 to come into contact with thelock plate 78 even when the travelingmanipulation lever 36 is tilted to the foremost position. Since the travelingmanipulation lever 36 on the right side does not overlap thelock plate 78 in the left-right direction, the travelingmanipulation lever 36 on the right side can be tilted in the front-rear direction. - As described above, the revolving
work vehicle 1 of the present embodiment includes the lower travelingbody 11, the two traveling manipulation levers 36, and thelock mechanism 70. By tilting the traveling manipulation levers 36 in the front-rear direction, it is possible to give an instruction on traveling of the lower travelingbody 11. Thelock mechanism 70 is capable of restricting tilting of the two traveling manipulation levers 36 in the front-rear direction. Thelock mechanism 70 includes thehydraulic cylinder 71, thetransmission unit 72, and thelock plate 78. Thehydraulic cylinder 71 is configured to generate drive power. Thetransmission unit 72 is configured to transmit the drive power generated by thehydraulic cylinder 71. Thelock plate 78 is a plate-shaped member. Thelock plate 78 has a thickness direction being in parallel with the longitudinal directions of the traveling manipulation levers 36 positioned at the neutral position. Thelock plate 78 has thefirst recess 78e and thesecond recess 78f. The drive power transmitted via thetransmission unit 72 causes thelock plate 78 to turn around a turning axis being in parallel with the longitudinal directions of the traveling manipulation levers 36 being at the neutral position to change the position of thelock plate 78 between the lock position, where the two traveling manipulation levers 36 are respectively accommodated in thefirst recess 78e and thesecond recess 78f to restrict the tilting of the traveling manipulation levers 36 in the front-rear direction, and the release position, where the two traveling manipulation levers 36 are outside thefirst recess 78e and thesecond recess 78f. - This configuration restricts movement of the traveling manipulation levers 36 themselves, rather than tilting of an additional member attached to the bases of the traveling manipulation levers 36. This expands the range in which the
lock mechanism 70 can be attached, thereby making it possible to enhance the flexibility in designing. In addition, this configuration does not need the additional member attached to the traveling manipulation levers 36, and therefore can be simplified. Furthermore, since thelock plate 78 has the thickness direction being in parallel with the longitudinal directions of the traveling manipulation levers 36 being at the neutral position and thelock plate 78 is configured to turn around the turning axis extending in the longitudinal direction, thelock plate 78 can turn with a small turning trajectory. Therefore, thelock mechanism 70 can be accommodated in a small space. - In the revolving
work vehicle 1 of the present embodiment, thehydraulic cylinder 71 includes themovable part 71b, which is configured to perform a linear motion to generate drive power. Thetransmission unit 72 converts the linear motion of themovable part 71b into a turning motion around the turning axis being in parallel with the longitudinal directions of the traveling manipulation levers 36 being at the neutral position to cause thelock plate 78 to turn. The direction in which themovable part 71b performs the linear motion is in parallel with the longitudinal directions of the traveling manipulation levers 36 being at the neutral position. - With this configuration, since the direction in which the
movable part 71b performs the linear motion is in parallel with both of the longitudinal directions of the traveling manipulation levers 36 being at the neutral position and the direction of the turning axis of thelock plate 78, it is possible to simplify the configuration of thetransmission unit 72 and to downsize thetransmission unit 72. - The revolving
work vehicle 1 of the present embodiment includes the work manipulation levers 61 and theconsole boxes 60. The work manipulation levers 61 are respectively disposed on the left and right sides of the driver'sseat 39, and are usable for manipulation of at least thework device 13. Theconsole boxes 60 are respectively provided with the work manipulation levers 61. Theconsole boxes 60 are turnable together with the work manipulation levers 61 around the turning axis extending in the left-right direction. At a timing when the work manipulation levers 61 and theconsole boxes 60 start turning rearward from the normal posture, where work with thework device 13 is to be performed, thelock mechanism 70 starts restricting the tilting of the two traveling manipulation levers 36. - With this configuration, it is possible to lock the traveling manipulation levers 36 at the timing when the work manipulation levers 61 and the
console boxes 60 start turning rearward (i.e., at an early timing). In addition, in view of the fact that the configuration in which the work manipulation levers 61 and theconsole boxes 60 are caused to turn rearward together is often applied to small revolvingwork vehicles 1, such as those described in the present embodiment, the effect of the present invention of making it possible for thelock mechanism 70 to be accommodated in a small space is more effective. - The revolving
work vehicle 1 of the present embodiment has the following features. That is, the revolvingwork vehicle 1 includes the driver'sseat 39 and the floor. On the driver'sseat 39, the operator can sit. On the floor, the operator sitting on the driver'sseat 39 can place his/her feet. The revolvingwork vehicle 1 includes thesteering box 50. Thesteering box 50 is disposed so as to protrude upward from a portion of the floor which portion is in front of the driver'sseat 39. Thesteering box 50 internally includes the directionselector valve unit 38 made of the plurality of direction selector valves capable of changing the feeding direction of operating oil from one to another. The two traveling manipulation levers 36 are disposed in thesteering box 50. Thelock mechanism 70 is disposed inside thesteering box 50. - In view of the fact that the space inside the
steering box 50 tends to be limited due to the directionselector valve unit 38 disposed inside thesteering box 50, the effect of the present invention of making it possible for thelock mechanism 70 to be accommodated in a small space is more effective. Also in view of the fact that the configuration in which thesteering box 50 is disposed in front of the driver'sseat 39 is often applied to small revolvingwork vehicles 1, such as those described in the present embodiment, the effect of the present invention is more effective. - The preferred embodiments of the present invention have been described above. However, the configurations described above can be modified as below, for example.
- The direction in which the
lock plate 78 turns to unlock the traveling manipulation levers 36 may alternatively be reverse to that of the above-described embodiment (i.e., a counterclockwise direction in a top view). The direction of the power generated by thehydraulic cylinder 71 may not be in parallel with the lever longitudinal direction, and may alternatively be perpendicular to the lever longitudinal direction, for example. - In the configuration according to the above-described embodiment, the
console boxes 60 are caused to turn rearward together with the work manipulation levers 61 to disable operation of the work manipulation levers 61 for giving an instruction to thework device 13 and/or the like. This configuration may be replaced by a configuration including an additional lever used to inhibit the work manipulation levers 61 from giving an instruction to the work device and/or the like (i.e., a configuration not allowing theconsole boxes 60 to turn when the operator gets in or off the work vehicle). - In the embodiment described above, the
hydraulic cylinder 71 is employed as the driving unit of the lock mechanism. Instead of this, a driving unit configured in a different manner may be employed. Alternatively, for example, the driving unit may be a cylinder configured to generate drive power upon receipt of fluid (e.g., air) that is not operating oil. Further alternatively, the driving unit may be a driving unit (e.g., a solenoid) configured to generate drive power depending on the presence or absence of an electric signal or an electric current. - The explanation of the embodiment described above has dealt with the example in which the present invention is applied to the revolving work vehicle (hydraulic excavator).
- According to examples not within the scope of the presently claimed invention, features of the present invention may be applied to other work vehicles (e.g., construction machines for civil engineering work, construction work, and the like) as long as they include two traveling manipulation levers used to give an instruction on traveling, for example.
-
- 1
- revolving work vehicle (work vehicle)
- 11
- lower traveling body (traveling body)
- 12
- upper revolving body
- 36
- traveling manipulation lever
- 50
- steering box
- 60
- console box
- 70
- lock mechanism
- 71
- hydraulic cylinder (driving unit)
- 72
- transmission unit
- 78
- lock plate
Claims (4)
- A hydraulic excavator comprising:a traveling body (11);two traveling manipulation levers (36) configured to be tilted in a front-rear direction to give an instruction on traveling of the traveling body (11); anda lock mechanism (70) capable of restricting the tilting of the two traveling manipulation levers (36) in the front-rear direction, whereinthe lock mechanism (70) includesa driving unit (71) configured to generate drive power,a transmission unit (72) configured to transmit the drive power generated by the driving unit (71), anda lock plate (78) being a plate-shaped member, the lock plate (78) having a thickness direction being in parallel with longitudinal directions of the two traveling manipulation levers (36) positioned at a neutral position, the lock plate (78) having a first recess (78e) and a second recess (78f), andthe drive power transmitted via the transmission unit (72) causes the lock plate (78) to turn about a turning axis being in parallel with the longitudinal directions of the two traveling manipulation levers (36) being at the neutral position to change a position of the lock plate(78) between a lock position, where the two traveling manipulation levers (36) are respectively accommodated in the first recess (78e) and the second recess (78f) to restrict the tilting of the two traveling manipulation levers (36) in the front-rear direction, and a release position, where the two traveling manipulation levers (36) are outside the first recess (78e) and the second recess (78f).
- The hydraulic excavator according to claim 1, whereinthe driving unit (71) includes a movable part (71b), which is configured to perform a linear motion to generate the drive power,the transmission unit (72) converts the linear motion of the movable part (71b) into a turning motion around a turning axis being in parallel with the longitudinal directions of the two traveling manipulation levers (36) being at the neutral position to cause the lock plate (78) to turn, anda direction in which the movable part (71b) performs the linear motion is in parallel with the longitudinal directions of the two traveling manipulation levers (36) being at the neutral position.
- The hydraulic excavator according to claim 1 or 2, further comprising:work manipulation levers (61) respectively disposed on left and right sides of a driver's seat (39) on which an operator sits, the work manipulation levers (36) being usable for manipulation of at least a work device; andconsole boxes (60) respectively provided with the work manipulation levers (61), the console boxes (60) being turnable together with the work manipulation levers (61) around a turning axis extending in a left-right direction, whereinat a timing when the work manipulation levers (61) and the console boxes (60) start turning rearward from the normal posture, where work with the work device is to be performed, the lock mechanism starts restricting the tilting of the two traveling manipulation levers (36).
- The hydraulic excavator according to claim 1, further comprising:a driver's seat (39) on which an operator sits;a floor on which the operator sitting on the driver's seat places operator's feet; anda steering box (50) disposed so as to protrude upward from a portion of the floor which portion is in front of the driver's seat (39), the steering box(50) internally including a direction selector valve unit (38) made of a plurality of direction selector valves capable of changing a feeding direction of operating oil from one to another, whereinthe two traveling manipulation levers (36) are disposed in the steering box (50), andthe steering box (50) internally includes the lock mechanism (70).
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017180258A JP6735258B2 (en) | 2017-09-20 | 2017-09-20 | Work vehicle |
| PCT/JP2018/028402 WO2019058763A1 (en) | 2017-09-20 | 2018-07-30 | Work vehicle |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP3686355A1 EP3686355A1 (en) | 2020-07-29 |
| EP3686355A4 EP3686355A4 (en) | 2021-06-16 |
| EP3686355B1 true EP3686355B1 (en) | 2023-06-28 |
Family
ID=65810218
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18858555.8A Active EP3686355B1 (en) | 2017-09-20 | 2018-07-30 | Hydraulic excavator |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP3686355B1 (en) |
| JP (1) | JP6735258B2 (en) |
| KR (2) | KR102482320B1 (en) |
| BR (1) | BR112020003686A2 (en) |
| WO (1) | WO2019058763A1 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7652669B2 (en) | 2021-09-16 | 2025-03-27 | ヤンマーホールディングス株式会社 | Locking mechanism |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5828043Y2 (en) * | 1977-10-07 | 1983-06-18 | 株式会社クボタ | Work vehicle arm lowering prevention structure |
| JPS5943566U (en) * | 1982-09-14 | 1984-03-22 | 日立建機株式会社 | Construction machinery travel lever device |
| JPH0327099Y2 (en) * | 1984-09-10 | 1991-06-12 | ||
| JP2770994B2 (en) * | 1989-09-30 | 1998-07-02 | 井関農機株式会社 | Locking device for hydraulic operating lever in small excavator |
| JP2582937B2 (en) * | 1990-11-30 | 1997-02-19 | 日立建機株式会社 | Lever lock device |
| JP3005589B2 (en) * | 1991-10-15 | 2000-01-31 | 井関農機株式会社 | Locking device for operating lever |
| JP2625306B2 (en) * | 1992-01-14 | 1997-07-02 | 株式会社豊田自動織機製作所 | Support device for limit switch for cargo handling control |
| JPH08284212A (en) | 1995-04-13 | 1996-10-29 | Shin Caterpillar Mitsubishi Ltd | Shift lever fixing device for travel work machine |
| JPH11180677A (en) * | 1997-12-24 | 1999-07-06 | Furukawa Co Ltd | Safety device of crawler crane |
| JP4057742B2 (en) * | 1999-05-13 | 2008-03-05 | 住友建機製造株式会社 | Construction machine travel lever locking device |
| JP2007276942A (en) | 2006-04-05 | 2007-10-25 | Toyota Industries Corp | Simultaneous operation restriction mechanism and fork lift |
| JP5162019B1 (en) * | 2011-10-28 | 2013-03-13 | 株式会社小松製作所 | Operation lever lock device |
| GB2527334A (en) * | 2014-06-18 | 2015-12-23 | Bamford Excavators Ltd | Working machine joystick assembly |
| JP6258881B2 (en) | 2015-01-29 | 2018-01-10 | 株式会社日立建機ティエラ | Small excavator |
-
2017
- 2017-09-20 JP JP2017180258A patent/JP6735258B2/en active Active
-
2018
- 2018-07-30 EP EP18858555.8A patent/EP3686355B1/en active Active
- 2018-07-30 KR KR1020207033494A patent/KR102482320B1/en active Active
- 2018-07-30 BR BR112020003686-2A patent/BR112020003686A2/en not_active Application Discontinuation
- 2018-07-30 KR KR1020197022957A patent/KR102187012B1/en active Active
- 2018-07-30 WO PCT/JP2018/028402 patent/WO2019058763A1/en not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| EP3686355A1 (en) | 2020-07-29 |
| KR102482320B1 (en) | 2022-12-27 |
| KR102187012B1 (en) | 2020-12-04 |
| BR112020003686A2 (en) | 2020-09-01 |
| KR20190105037A (en) | 2019-09-11 |
| JP2019056216A (en) | 2019-04-11 |
| JP6735258B2 (en) | 2020-08-05 |
| EP3686355A4 (en) | 2021-06-16 |
| KR20200135557A (en) | 2020-12-02 |
| WO2019058763A1 (en) | 2019-03-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6702999B2 (en) | Work vehicle | |
| CN103547484A (en) | Movable ladder device for work vehicles | |
| CN112638744B (en) | Traveling vehicle | |
| EP3190236B1 (en) | Work vehicle with control console | |
| EP3612682B1 (en) | Loader frame | |
| CN107077162A (en) | Working truck | |
| JP2019214475A (en) | Telescoping boom with rotary extension and locking system | |
| EP3686355B1 (en) | Hydraulic excavator | |
| EP3674485B1 (en) | Work vehicle | |
| JP6944025B2 (en) | Work vehicle | |
| JP7130546B2 (en) | work machine | |
| JP2019052455A (en) | Work vehicle | |
| EP4215674B1 (en) | Work vehicle | |
| JP7780557B2 (en) | Work vehicles | |
| JP4537967B2 (en) | Tractor shifting operation device | |
| JP7833933B2 (en) | Working machinery | |
| JP3759817B2 (en) | Work vehicle | |
| US20170225722A1 (en) | Mechanical control linkage | |
| JP7172508B2 (en) | outboard steering gear | |
| JP2018053521A (en) | Construction machine | |
| JP5479257B2 (en) | Work vehicle | |
| CN207092177U (en) | Dynamic power machine | |
| JP2026001534A (en) | Work vehicles | |
| JP2007237788A5 (en) | ||
| BR112020002977B1 (en) | WORK VEHICLE |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20200407 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: YANMAR POWER TECHNOLOGY CO., LTD. |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| A4 | Supplementary search report drawn up and despatched |
Effective date: 20210519 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E02F 9/24 20060101AFI20210512BHEP Ipc: E02F 9/20 20060101ALI20210512BHEP Ipc: E02F 9/22 20060101ALI20210512BHEP Ipc: G05G 5/00 20060101ALI20210512BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20220408 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20230131 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1582802 Country of ref document: AT Kind code of ref document: T Effective date: 20230715 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602018052599 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230928 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20230628 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1582802 Country of ref document: AT Kind code of ref document: T Effective date: 20230628 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230929 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231028 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231030 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231028 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20230731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230730 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230730 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602018052599 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230731 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20230928 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230731 |
|
| 26N | No opposition filed |
Effective date: 20240402 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230730 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230928 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230730 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230928 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20180730 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20180730 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250722 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250725 Year of fee payment: 8 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230628 |