EP3629103A1 - Timepiece comprising a mechanical movement of which the oscillation is regulated by an electronic device - Google Patents
Timepiece comprising a mechanical movement of which the oscillation is regulated by an electronic device Download PDFInfo
- Publication number
- EP3629103A1 EP3629103A1 EP18197529.3A EP18197529A EP3629103A1 EP 3629103 A1 EP3629103 A1 EP 3629103A1 EP 18197529 A EP18197529 A EP 18197529A EP 3629103 A1 EP3629103 A1 EP 3629103A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- frequency
- regulation
- pulses
- moments
- period
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000001105 regulatory effect Effects 0.000 title claims abstract description 49
- 230000010355 oscillation Effects 0.000 title claims description 21
- 230000033228 biological regulation Effects 0.000 claims abstract description 135
- 238000012937 correction Methods 0.000 claims abstract description 36
- 239000000463 material Substances 0.000 claims description 18
- 230000002123 temporal effect Effects 0.000 claims description 11
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 claims description 9
- 230000001360 synchronised effect Effects 0.000 claims description 8
- 230000001052 transient effect Effects 0.000 claims description 8
- 239000013078 crystal Substances 0.000 claims description 4
- 229910052710 silicon Inorganic materials 0.000 claims description 4
- 239000010703 silicon Substances 0.000 claims description 4
- 229910052814 silicon oxide Inorganic materials 0.000 claims description 3
- PMHQVHHXPFUNSP-UHFFFAOYSA-M copper(1+);methylsulfanylmethane;bromide Chemical compound Br[Cu].CSC PMHQVHHXPFUNSP-UHFFFAOYSA-M 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 7
- 239000010453 quartz Substances 0.000 description 5
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical group [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 4
- 230000002457 bidirectional effect Effects 0.000 description 4
- 239000003990 capacitor Substances 0.000 description 3
- 230000007935 neutral effect Effects 0.000 description 3
- 101100171060 Caenorhabditis elegans div-1 gene Proteins 0.000 description 2
- 230000001186 cumulative effect Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000000737 periodic effect Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- PIGFYZPCRLYGLF-UHFFFAOYSA-N Aluminum nitride Chemical compound [Al]#N PIGFYZPCRLYGLF-UHFFFAOYSA-N 0.000 description 1
- 241001415961 Gaviidae Species 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000000593 degrading effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005764 inhibitory process Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/04—Oscillators acting by spring tension
- G04B17/06—Oscillators with hairsprings, e.g. balance
- G04B17/066—Manufacture of the spiral spring
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C3/00—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means
- G04C3/04—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a balance
- G04C3/047—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a balance using other coupling means, e.g. electrostrictive, magnetostrictive
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/04—Oscillators acting by spring tension
- G04B17/06—Oscillators with hairsprings, e.g. balance
- G04B17/063—Balance construction
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/20—Compensation of mechanisms for stabilising frequency
- G04B17/22—Compensation of mechanisms for stabilising frequency for the effect of variations of temperature
- G04B17/222—Compensation of mechanisms for stabilising frequency for the effect of variations of temperature with balances
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B17/00—Mechanisms for stabilising frequency
- G04B17/20—Compensation of mechanisms for stabilising frequency
- G04B17/22—Compensation of mechanisms for stabilising frequency for the effect of variations of temperature
- G04B17/227—Compensation of mechanisms for stabilising frequency for the effect of variations of temperature composition and manufacture of the material used
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C3/00—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means
- G04C3/04—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a balance
Definitions
- the present invention relates to a timepiece comprising a mechanical movement, provided with a mechanical oscillator which is formed by a balance and a hairspring, and an electronic regulating device for regulating the frequency of the mechanical oscillator which controls the running of the mechanical movement.
- the electronic regulating device comprises an auxiliary oscillator of the electronic type generally more precise than the mechanical oscillator, in particular a quartz oscillator.
- the patent application US 2013/0051191 relates to a timepiece comprising a balance spring and an electronic circuit for regulating the frequency of oscillation of this balance spring.
- the hairspring is made of a piezoelectric material or comprises two lateral layers of piezoelectric material on a silicon core, two external lateral electrodes being arranged on the lateral surfaces of the hairspring. These two electrodes are connected to the electronic regulation circuit which comprises a plurality of switchable capacitors arranged in parallel and connected to the two electrodes of the hairspring.
- FIG. 1 Using the Figures 1 to 4 , a timepiece of the type described in the above-mentioned American patent application will be described.
- Figure 1 only the mechanical resonator 2 of the mechanical movement of the timepiece, this resonator comprising a balance 4 oscillating around a geometric axis 6 and a hairspring 8 whose terminal curve 10 conventionally passes through a stud 12 secured to a balance bridge (not shown) of the mechanical movement.
- the Figure 2 schematically shows a portion of the hairspring 8.
- This hairspring is formed by a central body 14 made of silicon, two lateral layers 16, 18 made of piezoelectric material, in particular aluminum nitride (AlN), and two external metal electrodes 20, 22.
- the two electrodes are connected by conductive wires 26, 28 (diagrammatic representation) to an electronic regulation circuit 24.
- the Figure 3 (which reproduces the figure 1 of the previous document considered with some additional information from figures 2 and 7 ) shows the general arrangement of the regulating device 32 which is incorporated in the timepiece in question and in particular the electronic regulating circuit 24.
- This circuit 24 comprises a first capacitor 34 connected to the two electrodes of the piezoelectric hairspring and a plurality of switchable capacitances 36a to 36d which are arranged in parallel with the first capacitance, so as to form a variable capacitance Cv in order to be able to vary the value of the capacitance connected to the electrodes of the balance spring and thus vary, according to the teaching of the document, the rigidity hairspring.
- the circuit 24 further comprises a comparator 38, the two inputs of which are connected respectively to the two electrodes of the hairspring 8, this comparator being designed to supply a logic signal making it possible to determine, thanks to successive changes in the logic state of this logic signal, the passages by zero of the voltage induced between the two electrodes of the hairspring.
- the logic signal is supplied to a logic circuit 40 which also receives a reference signal from a clock circuit 42 associated with a quartz resonator 44. Based on a comparison between the reference signal and the logic signal supplied by the comparator 38, the logic circuit 40 controls the switches of the switchable capacitors 36a to 36d.
- a full-wave rectifier circuit 46 conventionally formed by a bridge with four diodes, which supplies a DC voltage V DC and charges a storage capacity 48.
- This electrical energy supplied by the piezoelectric hairspring provides power to the device 32.
- There is therefore an autonomous electrical system because it is self-powered in the sense that the electrical energy comes from the mechanical energy supplied to the mechanical resonator 2 including the piezoelectric hairspring 8, when the resonator mechanical oscillates, forms an electromechanical transducer (an electric current generator).
- the electronic regulation circuit 24 can only reduce the oscillation frequency of the mechanical resonator 2 by increasing the value of the variable capacitance Cv.
- This finding is confirmed by the graph of the Figure 4 which shows the curve 50 giving the path difference as a function of the value of the variable capacity Cv. It is observed in fact that the path difference obtained is always less than zero and increases in absolute value when the value of the variable capacity increases.
- the regulation system requires that the natural frequency of the mechanical oscillator (frequency in the absence of regulation) is greater than the nominal frequency (setpoint frequency) of this mechanical oscillator.
- the present invention aims to provide a timepiece, provided with a mechanical resonator comprising a hairspring formed at least partially of a piezoelectric material and an electronic regulation system, associated with the piezoelectric hairspring, which does not have the drawbacks of the timepiece of the prior art described above, in particular which can be associated with a mechanical movement whose progress is initially adjusted optimally, that is to say to the best of its ability.
- the invention aims to provide an electronic regulation system which is, thanks to the use of a piezoelectric hairspring, discrete and autonomous and which is truly complementary to the mechanical movement by making it possible to increase its precision without degrading by elsewhere an optimal initial adjustment of this mechanical movement.
- the subject of the invention is a timepiece comprising a regulating device arranged to be able to regulate the average frequency of a mechanical oscillator, formed by a balance and a hairspring, which cadences the running of the timepiece. horology, this regulating device comprising an auxiliary time base, formed by an auxiliary electronic oscillator, which provides a reference frequency signal for regulation.
- the hairspring is formed at least partially by a piezoelectric material and by at least two electrodes arranged so as to present between them a voltage induced by the piezoelectric material undergoing mechanical stress and electrically connected to the regulating device which is arranged to be able to vary the impedance of the regulation system formed by the piezoelectric material, the at least two electrodes and the regulation device.
- the regulating device is arranged so as to be able to temporarily vary the electrical resistance generated by this regulation between the at least two electrodes, in order to be able to generate at least at times regulation pulses which are distinct and each have a certain duration T P , each regulation pulse consisting of a momentary decrease in said electrical resistance relative to a nominal electrical resistance which is generated by the regulation device between the two electrodes apart from the separate regulation pulses.
- the regulating device is arranged to determine by means of the reference time base the start of each of the regulating pulses, so as to satisfy the aforementioned mathematical relationship between the temporal distance and the regulating period, and thus to determine the frequency of regulation.
- said moments are contiguous and together form a continuous time range.
- the regulation device is arranged to apply during the continuous time range the regulation pulses so that any two successive regulation pulses intervening in this continuous time range present between their beginnings the time distance D T with the regulation period Treg equal to one setpoint period T0c, which is the inverse of the setpoint frequency F0c, so as to be able to synchronize continuously, after a possible initial transient phase, the frequency of the mechanical oscillator with a setpoint frequency F0c during the continuous time range.
- the number N, respectively M is constant and predefined for the continuous time range.
- the timepiece further comprises a device for measuring a time drift in the operation of the mechanical oscillator relative to its set frequency F0c, and the regulating device is arranged to select , before each of said moments, for the regulation period Treg, depending on whether at least some positive or negative time drift is detected, respectively a first correction period Tcor1 which is greater than a setpoint period T0c, equal to the reverse of the setpoint frequency, or a second correction period Tcor2 which is less than the setpoint period.
- the number N, respectively M is constant during each of said moments and it is either predetermined or determined before the next moment considered.
- the characteristics of the timepiece according to the invention it is possible to correct both an advance and a delay in the natural progress of a mechanical movement by acting by regulation pulses, each having a limited duration, which vary the resistance between the at least two electrodes of the hairspring which is formed at least partially of a piezoelectric material.
- the separate regulation pulses are applied without interruption and the instants of their triggering are determined so that the frequency of the mechanical oscillator is permanently synchronized to a set frequency, so that no temporal drift occurs after an initial phase allowing the desired synchronization to be obtained.
- This first embodiment is very advantageous by the simplicity of its electronic circuit.
- the regulation system generates an induced voltage between the two electrodes of the hairspring, which makes it possible to easily count the alternations or the periods of the mechanical oscillator and thus to be able to detect a temporal drift in the progress of the timepiece.
- the timepiece according to the invention comprises, like the timepiece of the prior art described above, a mechanical timepiece movement provided with a mechanical oscillator, formed by a pendulum and a piezoelectric hairspring, for example as shown to the Figures 1 and 2 , and arranged to clock the progress of the watch movement, this mechanical oscillator having a preset frequency F0c.
- the hairspring is formed at least partially by a piezoelectric material and it comprises two electrodes 20, 22 arranged so as to be able to present therebetween a voltage induced by the piezoelectric material when the latter is put under mechanical stress during an oscillation of the mechanical oscillator.
- the timepiece further comprises a regulation device arranged to be able to regulate the average frequency of the mechanical oscillator and comprising an auxiliary time base, formed by an auxiliary electronic oscillator and providing a reference frequency signal.
- the two electrodes of the balance spring are electrically connected to the regulating device which is arranged to be able to vary the impedance of the regulating system which is formed by the piezoelectric material, the two electrodes and the regulating device.
- the regulation device is arranged so as to be able to vary momentarily the electrical resistance generated by this regulation device between the two electrodes of the hairspring, in order to be able to generate at least at times regulation pulses which are distinct and each have a certain duration T P , each regulation pulse consisting of a momentary decrease in the electric resistance of the regulation system, namely the aforementioned electric resistance relative to a nominal electric resistance which is generated by the regulation device between the two electrodes outside separate regulatory pulses.
- the regulation device is arranged to determine by means of the reference time base the start of each of said regulation pulses, so as to satisfy the aforementioned mathematical relation between the time distance D T and the regulation period Treg, and thus determine the regulation frequency.
- Similar results can be obtained with a division by an even number 2M and a similar condition between K and M, but a priori it seems that in the latter case synchronization is not established as effectively as for an odd number, the effect of the short-circuit pulses being less.
- the electronic circuit which forms the entire regulating device 52, is very simple.
- a quartz resonator 44 is excited by a clock circuit 42, the latter supplying a reference signal S Ref either at the frequency of the quartz F Q , preferably at a frequency adjusted to 32,768 Hz, or at a fraction of this frequency F Q , for example F Q / 4 and preferably at a fraction of the frequency adjusted in particular by means of an inhibition circuit known to the person skilled in the art.
- the reference signal S Ref is supplied to a frequency divider 64 which outputs a control signal S com to a timer 58 which, in response to the control signal, supplies a short-circuit signal Scc to a switch 60 arranged between the two electrodes 20, 22 of the piezoelectric hairspring 8 (shown schematically in the Figure 6 ) at the frequency imposed by the control signal.
- This process takes place without interruption in a continuous time range which lasts as long as the regulating device is active, that is to say as long as it is electrically powered.
- the piezoelectric hairspring 8 is formed at least partially by a piezoelectric material and by at least two electrodes 20, 22 (see Figures 2 and 10 ) which are arranged so as to be able to present between them a voltage induced U (t) by the piezoelectric material when the latter is put under mechanical stress during an oscillation of the mechanical oscillator (see Figure 9 ).
- the numbers N and M are constants and predefined for the continuous time range during which the short-circuit pulses are applied which define the regulation pulses.
- the timer 58 on each pulse of the control signal, closes the switch 60 (passing switch and therefore conductive) during a time interval T R , so that the short-circuit pulses each have a duration T R , which is preferably less than a quarter of the set period T0c.
- the duration of the regulation pulses is less than or substantially equal to one tenth of the setpoint period T0c.
- FIG. 7 To the Figure 7 is represented the electronic diagram of a regulation device, identical to that described above, which is associated with a supply circuit 66, formed of a rectifier 68 of an induced voltage U (t) between the two electrodes 20, 22 of hairspring 8 when the mechanical resonator oscillates and arranged to supply the regulating device 62, the rectified voltage being stored in a storage capacity C AL , so that the regulating device with the supply circuit form a unit autonomous.
- this autonomous unit is supported by the pendulum 4 (see Figure 1 ) to which it is attached.
- the timepiece comprises a regulating device 62 formed by an electronic regulating circuit 62a and an auxiliary time base which comprises an auxiliary oscillator and which supplies a reference signal S Ref to the electronic regulating circuit.
- This time base comprises for example a quartz resonator 44 and a clock circuit 42 which supplies the reference signal S Ref , already described in the context of the first main embodiment, to a divider having at least two stages DIV1 and DIV2, this divider being included in the circuit 62a.
- the piezoelectric hairspring 8 is similar to that described in the first main embodiment and its two electrodes 20, 22 are electrically connected to the electronic regulation circuit 62a.
- the electronic regulation circuit includes a device for measuring a possible time drift in the progress of the watch movement relative to a set frequency for the mechanical oscillator which is determined by the auxiliary time base 42,44.
- the measuring device is formed by a hysteresis comparator 54, the two inputs of which are connected to the two electrodes 20, 22 of the piezoelectric hairspring 8. It will be noted that in the example given, the electrode 20 is electrically connected to an input of the comparator 54 via the ground of the regulation device.
- the hysteresis comparator provides a digital 'Comp' signal (see Figure 9 ) whose logic state changes just after each pass of the mechanical oscillator by its neutral position (angular position ⁇ (t) equal to zero) and therefore after each pass through zero of the mechanical resonator forming this mechanical oscillator.
- the induced voltage U (t) generated by the piezoelectric hairspring is zero during the passage of the mechanical resonator through its neutral position (angular position 'zero'), while it is maximum, for a given charge applied between the two electrodes, when the mechanical resonator is in one or other of its two extreme positions (defining the amplitude of the mechanical oscillator respectively on both sides of the neutral position), as shown in Figure 9 .
- the signal 'Comp' is supplied to a first input 'Up' of a bidirectional counter CB forming the measuring device.
- the bidirectional counter is thus incremented by one unit at each period of oscillation of the mechanical oscillator (in particular at each rising edge of the signal). It therefore continuously receives a measurement of the instantaneous oscillation frequency from the mechanical oscillator.
- the bidirectional counter receives at its second input 'Down' a clock signal S hor supplied by the frequency divider DIV1 & DIV2, this clock signal corresponding to a set frequency F0c for the mechanical oscillator which is determined by l auxiliary time base auxiliary oscillator.
- the bidirectional counter supplies the control logic circuit 56 with a signal S DT corresponding to a cumulative error over time between the oscillation frequency of the mechanical oscillator and the set frequency, this cumulative error defining the time drift of the mechanical oscillator relative to the auxiliary oscillator.
- the regulating device 62 comprises a switch 60 formed by a transistor and arranged between the two electrodes 20, 22 of the hairspring 8, this switch being controlled by the logic control circuit 56 which is arranged to be able to close, via a timer 58, momentarily this switch so as to make it conducting / conducting during the regulation pulses, which then define short-circuit pulses.
- the control circuit selectively supplies a control signal S com to the timer 58 which, in response to this control signal, controls the momentary closing of the transistor 60 by applying to it a signal Scc.
- the control circuit determines the instant of the start of each short-circuit pulse by triggering or resetting the timer ('Timer') which directly turns transistor 60 on / off (switch closed), the timer determining the duration T R of each short circuit pulse.
- the timer opens the switch again so that the transistor 60 is no longer on, that is to say that it becomes non-conductive again.
- the regulation pulses each have a duration of less than a quarter of the setpoint period T0c which is equal to the inverse of the setpoint frequency for the mechanical oscillator.
- the duration of the regulation pulses is less than or substantially equal to one tenth of a set period.
- the electronic circuit 62a further comprises a supply circuit 66 of the regulation device, which has already been described previously.
- the regulation method according to the second main embodiment, implemented by the regulation device 62 and implemented in the logic control circuit 56, is set out below.
- the control logic circuit is arranged to be able to determine whether a time drift measured by the measuring device corresponds to at least a certain advance (CB> N1) or to at least a certain delay (CB ⁇ - N2), N1 and N2 being positive integers.
- the number N is preferably expected to be constant during each correction moment and it is either predetermined or determined before the next correction time considered.
- the integer N is expected to be smaller in an initial phase than in a final phase of each of the correction moments, so as to best reduce the initial transient phase.
- the number M is expected to be constant during each correction moment and it is either predetermined or determined before the next correction moment considered.
- a first regulation pulse is also supplied to the logic control circuit 56.
- the first regulation pulse is triggered by a rising edge or a falling edge of the signal 'Comp'.
- This hairspring 70 shown in cross section, comprises a central body 72 of silicon, a layer of silicon oxide 74 deposited on the surface of the central body so as to thermally compensate the hairspring, a conductive layer 76 deposited on the oxide layer silicon, and a piezoelectric material deposited in the form of a piezoelectric layer 78 on the conductive layer 76.
- Two electrodes 20a and 22a are arranged on the piezoelectric layer 78 respectively on the two lateral sides of the hairspring (the two electrodes being able to partially cover the lower and upper sides of the hairspring without however joining).
- the first part 80a and the second part 80b of the piezoelectric layer extending respectively on the two lateral sides of the central body 72 have, by their growth from the conductive layer 76, respective crystallographic structures which are symmetrical relative to a plane median 84 parallel to these two lateral sides.
- the piezoelectric layer has two same respective piezoelectric axes 82a, 82b which are perpendicular to the piezoelectric layer and in opposite directions. So we have an inversion of the sign of the induced voltage between the internal electrode and each of the two external lateral electrodes for the same mechanical stress.
- the piezoelectric layer consists of a crystal of aluminum nitride formed by a growth of this crystal from the conductive layer 76 (internal electrode) and perpendicular thereto.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Metallurgy (AREA)
- Manufacturing & Machinery (AREA)
- Electric Clocks (AREA)
- Oscillators With Electromechanical Resonators (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
La pièce d'horlogerie comprend un oscillateur mécanique, formé par un balancier et un spiral piézoélectrique (8), et un dispositif de régulation pour réguler la fréquence de l'oscillateur mécanique. Ce dispositif de régulation est agencé pour pouvoir engendrer des impulsions de régulation (Scc) temporellement séparées et consistant chacune en une diminution momentanée d'une résistance électrique appliquée par le dispositif de régulation entre deux électrodes (20, 22) du spiral piézoélectrique relativement à une résistance électrique nominale. Le dispositif de régulation est agencé pour pouvoir appliquer une pluralité d'impulsions de régulation durant chaque moment d'une succession de moments de correction distincts ou sans interruption sur une plage temporelle continue, de manière à respectivement synchroniser l'oscillateur mécanique sur une fréquence de correction dont la valeur dépend d'une dérive temporelle positive ou négative détectée ou sur une fréquence de consigne pour l'oscillateur mécanique.The timepiece comprises a mechanical oscillator, formed by a balance and a piezoelectric hairspring (8), and a regulating device for regulating the frequency of the mechanical oscillator. This regulation device is arranged to be able to generate regulation pulses (Scc) temporally separated and each consisting of a momentary decrease in an electrical resistance applied by the regulation device between two electrodes (20, 22) of the piezoelectric hairspring relative to a nominal electrical resistance. The regulating device is arranged to be able to apply a plurality of regulating pulses during each moment of a succession of distinct correction moments or without interruption over a continuous time range, so as to respectively synchronize the mechanical oscillator on a frequency of correction whose value depends on a positive or negative time drift detected or on a set frequency for the mechanical oscillator.
Description
La présente invention concerne une pièce d'horlogerie comprenant un mouvement mécanique, muni d'un oscillateur mécanique qui est formé par un balancier et un spiral, et un dispositif électronique de régulation pour réguler la fréquence de l'oscillateur mécanique qui contrôle la marche du mouvement mécanique.The present invention relates to a timepiece comprising a mechanical movement, provided with a mechanical oscillator which is formed by a balance and a hairspring, and an electronic regulating device for regulating the frequency of the mechanical oscillator which controls the running of the mechanical movement.
En particulier, le dispositif électronique de régulation comprend un oscillateur auxiliaire du type électronique généralement plus précis que l'oscillateur mécanique, en particulier un oscillateur à quartz.In particular, the electronic regulating device comprises an auxiliary oscillator of the electronic type generally more precise than the mechanical oscillator, in particular a quartz oscillator.
Plusieurs documents concernent la régulation électronique d'un oscillateur mécanique dans une pièce d'horlogerie. En particulier, la demande de brevet
A l'aide des
La
De plus, il est prévu à la suite du circuit de capacités commutables un circuit redresseur double alternance 46, formé classiquement d'un pont à quatre diodes, qui fournit une tension continue VDC et charge une capacité de stockage 48. Cette énergie électrique fournie par le spiral piézoélectrique permet une alimentation du dispositif 32. On a donc un système électrique autonome car il est autoalimenté en ce sens que l'énergie électrique provient de l'énergie mécanique fournie au résonateur mécanique 2 dont le spiral piézoélectrique 8, lorsque le résonateur mécanique oscille, forme un transducteur électromécanique (un générateur de courant électrique).In addition, there is provided following the switchable capacitance circuit a full-
Comme indiqué dans le document
La présente invention a pour but de proposer une pièce d'horlogerie, munie d'un résonateur mécanique comprenant un spiral formé au moins partiellement d'un matériau piézoélectrique et d'un système de régulation électronique, associé au spiral piézoélectrique, qui ne présente pas les inconvénients de la pièce d'horlogerie de l'art antérieur précédemment décrite, en particulier qui puisse être associé à un mouvement mécanique dont la marche est réglée initialement de manière optimale, c'est-à-dire au mieux de ses possibilités. Ainsi, l'invention a pour objectif de fournir un système de régulation électronique qui soit, grâce à l'utilisation d'un spiral piézoélectrique, discret et autonome et qui soit réellement complémentaire au mouvement mécanique en permettant d'augmenter sa précision sans dégrader par ailleurs un réglage initial optimal de ce mouvement mécanique.The present invention aims to provide a timepiece, provided with a mechanical resonator comprising a hairspring formed at least partially of a piezoelectric material and an electronic regulation system, associated with the piezoelectric hairspring, which does not have the drawbacks of the timepiece of the prior art described above, in particular which can be associated with a mechanical movement whose progress is initially adjusted optimally, that is to say to the best of its ability. Thus, the invention aims to provide an electronic regulation system which is, thanks to the use of a piezoelectric hairspring, discrete and autonomous and which is truly complementary to the mechanical movement by making it possible to increase its precision without degrading by elsewhere an optimal initial adjustment of this mechanical movement.
A cet effet, l'invention a pour objet une pièce d'horlogerie comprenant un dispositif de régulation agencé pour pouvoir réguler la fréquence moyenne d'un oscillateur mécanique, formé par un balancier et un spiral, qui cadence la marche de la pièce d'horlogerie, ce dispositif de régulation comprenant une base de temps auxiliaire, formée par un oscillateur électronique auxiliaire, qui fournit un signal de fréquence de référence pour la régulation. Le spiral est formé au moins partiellement par un matériau piézoélectrique et par au moins deux électrodes agencées de manière à présenter entre elles une tension induite par le matériau piézoélectrique subissant une contrainte mécanique et reliées électriquement au dispositif de régulation qui est agencé pour pouvoir varier l'impédance du système de régulation formé par le matériau piézoélectrique, les au moins deux électrodes et le dispositif de régulation. Le dispositif de régulation est agencé de manière à pouvoir varier momentanément la résistance électrique engendrée par ce dispositif de régulation entre les au moins deux électrodes, pour pouvoir engendrer au moins par moments des impulsions de régulation qui sont distinctes et ont chacune une certaine durée TP, chaque impulsion de régulation consistant en une diminution momentanée de ladite résistance électrique relativement à une résistance électrique nominale qui est engendrée par le dispositif de régulation entre les deux électrodes en dehors des impulsions de régulation distinctes. Le dispositif de régulation est agencé pour pouvoir appliquer une pluralité d'impulsions de régulation durant chacun desdits moments, de manière que deux impulsions de régulation successives quelconques parmi chaque pluralité d'impulsions de régulation présentent entre leurs débuts une distance temporelle DT égale à un nombre N multiplié par la moitié d'une période de régulation Treg déterminée pour chacun desdits moments, soit une relation mathématique DT = N·Treg / 2, N étant un nombre entier positif supérieur à zéro. La période de régulation Treg et le nombre N sont sélectionnés de manière à permettre une synchronisation de l'oscillateur mécanique sur une fréquence de régulation Freg = 1 /Treg au cours de chacun desdits moments. Le dispositif de régulation est agencé pour déterminer au moyen de la base de temps de référence le début de chacune des impulsions de régulation, de manière à satisfaire la relation mathématique susmentionnée entre la distance temporelle et la période de régulation, et pour ainsi déterminer la fréquence de régulation.To this end, the subject of the invention is a timepiece comprising a regulating device arranged to be able to regulate the average frequency of a mechanical oscillator, formed by a balance and a hairspring, which cadences the running of the timepiece. horology, this regulating device comprising an auxiliary time base, formed by an auxiliary electronic oscillator, which provides a reference frequency signal for regulation. The hairspring is formed at least partially by a piezoelectric material and by at least two electrodes arranged so as to present between them a voltage induced by the piezoelectric material undergoing mechanical stress and electrically connected to the regulating device which is arranged to be able to vary the impedance of the regulation system formed by the piezoelectric material, the at least two electrodes and the regulation device. The regulating device is arranged so as to be able to temporarily vary the electrical resistance generated by this regulation between the at least two electrodes, in order to be able to generate at least at times regulation pulses which are distinct and each have a certain duration T P , each regulation pulse consisting of a momentary decrease in said electrical resistance relative to a nominal electrical resistance which is generated by the regulation device between the two electrodes apart from the separate regulation pulses. The regulation device is arranged to be able to apply a plurality of regulation pulses during each of said moments, so that any two successive regulation pulses among each plurality of regulation pulses present between their beginnings a time distance D T equal to one number N multiplied by half of a regulation period Treg determined for each of said moments, ie a mathematical relation D T = N · Treg / 2, N being a positive integer greater than zero. The regulation period Treg and the number N are selected so as to allow synchronization of the mechanical oscillator on a regulation frequency Freg = 1 / Treg during each of said moments. The regulating device is arranged to determine by means of the reference time base the start of each of the regulating pulses, so as to satisfy the aforementioned mathematical relationship between the temporal distance and the regulating period, and thus to determine the frequency of regulation.
Selon une variante avantageuse, la distance temporelle DT est égale à un nombre impair 2M - 1 multiplié par la moitié d'une période de régulation Treg déterminée pour chacun desdits moments, soit une relation mathématique DT = (2M - 1)·Treg /2, M étant un nombre entier positif supérieur à zéro. La période de régulation Treg et le nombre M sont sélectionnés de manière à permettre une synchronisation de l'oscillateur mécanique sur une fréquence de régulation Freg = 1 /Treg au cours de chacun desdits moments.According to an advantageous variant, the time distance D T is equal to an odd number 2M - 1 multiplied by half of a regulation period Treg determined for each of said moments, ie a mathematical relation D T = (2M - 1) · Treg / 2, M being a positive integer greater than zero. The regulation period Treg and the number M are selected so as to allow synchronization of the mechanical oscillator on a regulation frequency Freg = 1 / Treg during each of said moments.
Selon un premier mode de réalisation principal, lesdits moments sont contigus et forment ensemble une plage temporelle continue. Le dispositif de régulation est agencé pour appliquer durant la plage temporelle continue les impulsions de régulation de manière que deux impulsions de régulation successives quelconques intervenant dans cette plage temporelle continue présentent entre leurs débuts la distance temporelle DT avec la période de régulation Treg égale à une période de consigne T0c, laquelle est l'inverse de la fréquence de consigne F0c, de manière à pouvoir synchroniser continument, après une éventuelle phase transitoire initiale, la fréquence de l'oscillateur mécanique sur une fréquence de consigne F0c durant la plage temporelle continue.According to a first main embodiment, said moments are contiguous and together form a continuous time range. The regulation device is arranged to apply during the continuous time range the regulation pulses so that any two successive regulation pulses intervening in this continuous time range present between their beginnings the time distance D T with the regulation period Treg equal to one setpoint period T0c, which is the inverse of the setpoint frequency F0c, so as to be able to synchronize continuously, after a possible initial transient phase, the frequency of the mechanical oscillator with a setpoint frequency F0c during the continuous time range.
Dans une variante particulière, le dispositif de régulation est agencé pour appliquer, durant la plage temporelle continue, périodiquement les impulsions de régulation avec une fréquence de déclenchement FD(N)=2·F0c/N dans le cadre de la variante générale exposée précédemment, respectivement FD(M)= 2·F0c/(2M- 1) dans le cadre de la variante avantageuse aussi mentionnée précédemment. Dans une variante préférée, le nombre N, respectivement M est constant et prédéfini pour la plage temporelle continue.In a particular variant, the regulation device is arranged to periodically apply, during the continuous time period, the regulation pulses with a triggering frequency F D (N) = 2 · F0c / N within the framework of the general variant described above. , respectively F D (M) = 2 · F0c / (2M- 1) in the context of the advantageous variant also mentioned above. In a preferred variant, the number N, respectively M is constant and predefined for the continuous time range.
Selon un deuxième mode de réalisation principal, la pièce d'horlogerie comprend en outre un dispositif de mesure d'une dérive temporelle dans le fonctionnement de l'oscillateur mécanique relativement à sa fréquence de consigne F0c, et le dispositif de régulation est agencé pour sélectionner, avant chacun desdits moments, pour la période de régulation Treg, selon qu'au moins une certaine dérive temporelle positive ou négative est détectée, respectivement une première période de correction Tcor1 qui est supérieure à une période de consigne T0c, égale à l'inverse de la fréquence de consigne, ou une deuxième période de correction Tcor2 qui est inférieure à la période de consigne. Chacun desdits moments est prévu avec une durée suffisante à l'établissement d'une phase synchrone dans laquelle la fréquence de l'oscillateur mécanique est synchronisée soit sur une première fréquence de correction Fcor1 = 1/Tcor1 lorsque ladite au moins une certaine dérive temporelle positive est détectée avant le moment considéré, soit sur une deuxième fréquence de correction Fcor2 = 1/Tcor2 lorsque ladite au moins une certaine dérive temporelle négative est détectée avant le moment considéré.According to a second main embodiment, the timepiece further comprises a device for measuring a time drift in the operation of the mechanical oscillator relative to its set frequency F0c, and the regulating device is arranged to select , before each of said moments, for the regulation period Treg, depending on whether at least some positive or negative time drift is detected, respectively a first correction period Tcor1 which is greater than a setpoint period T0c, equal to the reverse of the setpoint frequency, or a second correction period Tcor2 which is less than the setpoint period. Each of said moments is provided with a duration sufficient for the establishment of a synchronous phase in which the frequency of the mechanical oscillator is synchronized either on a first correction frequency Fcor1 = 1 / Tcor1 when said at least a certain positive time drift is detected before the considered moment, or on a second correction frequency Fcor2 = 1 / Tcor2 when said at least a certain negative temporal drift is detected before the considered moment.
Selon une variante préférée, lorsque ladite au moins une certaine dérive temporelle positive ou négative est détectée, le dispositif de régulation est agencé pour appliquer périodiquement, durant le moment suivant parmi lesdits moments, la pluralité d'impulsions de régulation correspondante avec respectivement une première fréquence FINF, selon la variante mentionnée précédemment FNF=2·Fcor1/N ou FINF=2-Fcor1/(2M-1), ou avec une deuxième fréquence FSUP, selon la variante mentionnée précédemment FSUP= 2·Fcor2/N ou FSUP= 2·Fcor2/(2M - 1). En particulier, le nombre N, respectivement M est constant au cours de chacun desdits moments et il est soit prédéterminé, soit déterminé avant le moment suivant considéré.According to a preferred variant, when said at least a certain positive or negative time drift is detected, the regulation device is arranged to periodically apply, during the next moment among said moments, the plurality of corresponding regulation pulses with respectively a first frequency F INF , according to the previously mentioned variant FNF = 2 · Fcor1 / N or F INF = 2-Fcor1 / (2M-1), or with a second frequency F SUP , according to the previously mentioned variant F SUP = 2 · Fcor2 / N or F SUP = 2 · Fcor2 / (2M - 1). In particular, the number N, respectively M is constant during each of said moments and it is either predetermined or determined before the next moment considered.
Grâce aux caractéristiques de la pièce d'horlogerie selon l'invention, il est possible de corriger aussi bien une avance qu'un retard dans la marche naturelle d'un mouvement mécanique en agissant par des impulsions de régulation, ayant chacune une durée limitée, qui varient la résistance entre les au moins deux électrodes du spiral qui est formé au moins partiellement d'un matériau piézoélectrique.Thanks to the characteristics of the timepiece according to the invention, it is possible to correct both an advance and a delay in the natural progress of a mechanical movement by acting by regulation pulses, each having a limited duration, which vary the resistance between the at least two electrodes of the hairspring which is formed at least partially of a piezoelectric material.
Dans le premier mode de réalisation principal, les impulsions de régulation distinctes sont appliquées sans interruption et les instants de leur déclenchement sont déterminés de manière que la fréquence de l'oscillateur mécanique soit synchronisée en permanence sur une fréquence de consigne, de sorte qu'aucune dérive temporelle n'intervient après une phase initiale permettant d'obtenir la synchronisation voulue. Ce premier mode de réalisation est très avantageux par la simplicité de son circuit électronique.In the first main embodiment, the separate regulation pulses are applied without interruption and the instants of their triggering are determined so that the frequency of the mechanical oscillator is permanently synchronized to a set frequency, so that no temporal drift occurs after an initial phase allowing the desired synchronization to be obtained. This first embodiment is very advantageous by the simplicity of its electronic circuit.
Dans le deuxième mode de réalisation principal, on tire parti du fait que le système de régulation engendre une tension induite entre les deux électrodes du spiral, ce qui permet de compter aisément les alternances ou les périodes de l'oscillateur mécanique et de pouvoir ainsi détecter une dérive temporelle dans la marche de la pièce d'horlogerie. Dans ce cas, il est prévu d'appliquer des impulsions de régulation que par moments séparés et seulement lorsque qu'une certaine dérive temporelle est détectée, de manière différenciée selon que cette dérive temporelle est positive ou négative, pour corriger la dérive temporelle.In the second main embodiment, advantage is taken of the fact that the regulation system generates an induced voltage between the two electrodes of the hairspring, which makes it possible to easily count the alternations or the periods of the mechanical oscillator and thus to be able to detect a temporal drift in the progress of the timepiece. In this case, provision is made to apply regulation pulses only at separate times and only when a certain time drift is detected, in a differentiated manner depending on whether this time drift is positive or negative, in order to correct the time drift.
L'invention sera décrite ci-après de manière plus détaillée à l'aide des dessins annexés, donnés à titre d'exemples nullement limitatifs, dans lesquels :
- La
Figure 1 , déjà décrite, montre une pièce d'horlogerie de l'art antérieur comprenant un résonateur mécanique, formé d'un balancier et d'un spiral piézoélectrique, et un circuit électronique de régulation qui est relié aux deux électrodes du spiral piézoélectrique; - La
Figure 2 est un agrandissement d'une portion du spiral piézoélectrique de laFigure 1 ; - La
Figure 3 montre partiellement le schéma électrique du dispositif de régulation de la pièce d'horlogerie de laFigure 1 ; - La
Figure 4 donne l'écart de marche pour la pièce d'horlogerie des figures précédentes en fonction d'une capacité variable appliquée entre les deux électrodes du spiral piézoélectrique; - La
Figure 5 montre l'évolution de la fréquence d'oscillation du résonateur mécanique lors d'une application périodique d'impulsions de régulation pour diverses fréquences de déclenchement de ces impulsions de régulation autour d'une fréquence égale au double d'une fréquence de consigne pour l'oscillateur mécanique de la pièce d'horlogerie; - La
Figure 6 montre le schéma électrique d'un dispositif de régulation incorporé dans une variante d'un premier mode de réalisation principal d'une pièce d'horlogerie selon l'invention; - La
Figure 7 montre le schéma électrique d'un dispositif de régulation incorporé dans une variante préférée du premier mode de réalisation principal; - La
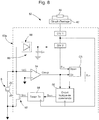
Figure 8 montre le schéma électrique d'un dispositif de régulation incorporé dans une variante d'un deuxième mode de réalisation principal d'une pièce d'horlogerie selon l'invention; - La
Figure 9 montre le graphe de la tension induite entre les deux électrodes du spiral piézoélectrique en fonction de la position angulaire du résonateur mécanique, ainsi qu'un signal fourni par un comparateur à hystérèse pour pouvoir compter les périodes d'oscillation du résonateur mécanique; et - La
Figure 10 est une coupe transversale d'un mode de réalisation préféré d'un spiral piézoélectrique formant le résonateur mécanique d'une pièce d'horlogerie selon l'invention.
- The
Figure 1 , already described, shows a timepiece of the prior art comprising a mechanical resonator, formed of a balance and a piezoelectric hairspring, and an electronic regulation circuit which is connected to the two electrodes of the piezoelectric hairspring; - The
Figure 2 is an enlargement of a portion of the piezoelectric hairspring of theFigure 1 ; - The
Figure 3 partially shows the electrical diagram of the device for regulating the timepiece of theFigure 1 ; - The
Figure 4 gives the step difference for the timepiece of the preceding figures as a function of a variable capacity applied between the two electrodes of the piezoelectric hairspring; - The
Figure 5 shows the evolution of the frequency of oscillation of the mechanical resonator during a periodic application of regulation pulses for various triggering frequencies of these regulation pulses around a frequency equal to twice a set frequency for l 'mechanical oscillator of the timepiece; - The
Figure 6 shows the electrical diagram of a regulating device incorporated in a variant of a first main embodiment of a timepiece according to the invention; - The
Figure 7 shows the electrical diagram of a regulating device incorporated in a preferred variant of the first main embodiment; - The
Figure 8 shows the electrical diagram of a regulating device incorporated in a variant of a second main embodiment of a timepiece according to the invention; - The
Figure 9 shows the graph of the voltage induced between the two electrodes of the piezoelectric hairspring as a function of the angular position of the mechanical resonator, as well as a signal supplied by a hysteresis comparator to be able to count the periods of oscillation of the mechanical resonator; and - The
Figure 10 is a cross section of a preferred embodiment of a piezoelectric hairspring forming the mechanical resonator of a timepiece according to the invention.
La pièce d'horlogerie selon l'invention comprend, comme la pièce d'horlogerie de l'art antérieur décrite précédemment, un mouvement horloger mécanique muni d'un oscillateur mécanique, formé par un balancier et un spiral piézoélectrique, par exemple tel que représenté aux
Selon l'invention, le dispositif de régulation est agencé de manière à pouvoir varier momentanément la résistance électrique engendrée par ce dispositif de régulation entre les deux électrodes du spiral, pour pouvoir engendrer au moins par moments des impulsions de régulation qui sont distinctes et ont chacune une certaine durée TP, chaque impulsion de régulation consistant en une diminution momentanée de la résistance électrique du système de régulation, à savoir la résistance électrique susmentionnée relativement à une résistance électrique nominale qui est engendrée par le dispositif de régulation entre les deux électrodes en dehors des impulsions de régulation distinctes. De manière générale, le dispositif de régulation est agencé pour pouvoir appliquer au moins par moments une pluralité d'impulsions de régulation durant chacun de ces moments, de manière que deux impulsions de régulation successives quelconques parmi chaque pluralité d'impulsions de régulation présentent entre leurs débuts une distance temporelle DT égale à un nombre N multiplié par la moitié d'une période de régulation Treg déterminée pour chacun desdits moments, soit une relation mathématique DT = N·Treg / 2, N étant un nombre entier positif supérieur à zéro. La période de régulation Treg et le nombre N sont sélectionnés de manière à permettre une synchronisation de l'oscillateur mécanique sur une fréquence de régulation Freg = 1 /Treg au cours de chacun desdits moments, comme ceci sera exposé plus en détails par la suite. Le dispositif de régulation est agencé pour déterminer au moyen de la base de temps de référence le début de chacune desdites impulsions de régulation, de manière à satisfaire la relation mathématique susmentionnée entre la distance temporelle DT et la période de régulation Treg, et pour ainsi déterminer la fréquence de régulation.According to the invention, the regulation device is arranged so as to be able to vary momentarily the electrical resistance generated by this regulation device between the two electrodes of the hairspring, in order to be able to generate at least at times regulation pulses which are distinct and each have a certain duration T P , each regulation pulse consisting of a momentary decrease in the electric resistance of the regulation system, namely the aforementioned electric resistance relative to a nominal electric resistance which is generated by the regulation device between the two electrodes outside separate regulatory pulses. Generally, the regulation device is arranged to be able to apply at least at times a plurality of regulation pulses during each of these moments, so that any two successive regulation pulses among each plurality of regulation pulses have between their starts a time distance D T equal to a number N multiplied by half of a regulation period Treg determined for each of said moments, that is to say a mathematical relation D T = N · Treg / 2, N being a positive integer greater than zero . The regulation period Treg and the number N are selected so as to allow synchronization of the mechanical oscillator on a regulation frequency Freg = 1 / Treg during each of said moments, as will be explained in more detail below. The regulation device is arranged to determine by means of the reference time base the start of each of said regulation pulses, so as to satisfy the aforementioned mathematical relation between the time distance D T and the regulation period Treg, and thus determine the regulation frequency.
Dans une variante avantageuse, la distance temporelle DT est égale à un nombre impair 2M - 1 multiplié par la moitié d'une période de régulation Treg déterminée pour chacun desdits moments, soit une relation mathématique DT = (2M - 1)·Treg /2, M étant un nombre entier positif supérieur à zéro. Cette variante, qui sélectionne les nombres impairs parmi les valeurs possibles pour le nombre N susmentionné dans la variante générale exposée ci-avant, est avantageuse car, selon les observations effectuées par les inventeurs, la sélection d'un nombre impair résulte en une plus grande efficacité de régulation relativement au cas d'un nombre pair pour le nombre N.In an advantageous variant, the time distance D T is equal to an odd number 2M - 1 multiplied by half of a regulation period Treg determined for each of said moments, ie a mathematical relation D T = (2M - 1) · Treg / 2, M being a positive integer greater than zero. This variant, which selects the odd numbers from the possible values for the number N mentioned in the general variant set out above, is advantageous because, according to the observations made by the inventors, the selection of an odd number results in a greater regulation efficiency relative to the case of an even number for the number N.
De préférence, au cours de chaque moment où intervient une pluralité d'impulsions de régulation, le dispositif de régulation est agencé pour appliquer périodiquement les impulsions de régulation avec une fréquence de déclenchement FD(N) = 2·Freg/N pour la variante générale, et FD(M) = 2·Freg/ (2M - 1) pour la variante avantageuse susmentionnée.Preferably, during each moment when a plurality of regulation pulses occurs, the regulation device is arranged to periodically apply the regulation pulses with a triggering frequency F D (N) = 2 · Freg / N for the variant general, and F D (M) = 2 · Freg / (2M - 1) for the aforementioned advantageous variant.
Dans le cadre du développement ayant conduit à la présente invention, les inventeurs ont mis en lumière un phénomène physique tout-à-fait remarquable en relation avec un oscillateur mécanique formé par un balancier et un spiral piézoélectrique, ce phénomène physique permettant d'effectuer selon l'invention une régulation de la fréquence moyenne d'un oscillateur mécanique incorporé dans un mouvement mécanique au moyen d'un dispositif de régulation électronique, comme exposé ci-avant. Ensuite, les inventeurs ont définis deux types de régulation basés sur ce phénomène physique qui sont respectivement implémentés dans deux modes de réalisation principaux qui seront décrits en détails par la suite. Pour exposer ce phénomène physique, la
Dans l'exemple représenté à la
- La courbe CF0 correspond à une fréquence de déclenchement des impulsions de court-circuit FD0 = 10.00 Hz, et on observe que la fréquence d'oscillation se stabilise à la fréquence de consigne Fso = F0c = 5.00 Hz ;
- Les courbes CF1 et CF2 correspondent à des fréquences de déclenchement des impulsions de court-circuit qui sont supérieures à FD0, soit respectivement FD1 = 10.03 Hz et FD2 = 10.08 Hz, et on observe que la fréquence d'oscillation se synchronise respectivement sur les fréquences de synchronisation FS1 = 5.015 Hz et FS2 = 5.04 Hz après une phase transitoire intervenant au début de chaque moment d'application d'impulsions de court-circuit ; et
- Les courbes CF3, CF4 et CF5 correspondent à des fréquences de déclenchement des impulsions de court-circuit qui sont inférieures à FD0, soit respectivement FD3 = 9.96 Hz, FD4 = 9.94 Hz et FD5 = 9.88 Hz, et on observe que la fréquence d'oscillation se synchronise respectivement sur les fréquences de synchronisation FS3 = 4.98 Hz, FS4 = 4.97 Hz et FS5 = 4.94 Hz après une phase transitoire intervenant au début de chaque moment d'application d'impulsions de court-circuit.
- Curve C F0 corresponds to a frequency for triggering short-circuit pulses F D0 = 10.00 Hz, and it is observed that the oscillation frequency stabilizes at the set frequency Fso = F0c = 5.00 Hz;
- The curves C F1 and C F2 correspond to tripping frequencies of the short-circuit pulses which are greater than F D0 , that is to say F D1 = 10.03 Hz and F D2 = 10.08 Hz, and it is observed that the oscillation frequency is synchronizes respectively on the synchronization frequencies F S1 = 5.015 Hz and F S2 = 5.04 Hz after a transient phase occurring at the start of each moment of application of short-circuit pulses; and
- The curves C F3 , C F4 and C F5 correspond to tripping frequencies of the short-circuit pulses which are lower than F D0 , i.e. respectively F D3 = 9.96 Hz, F D4 = 9.94 Hz and F D5 = 9.88 Hz, and it is observed that the oscillation frequency is synchronized respectively with the synchronization frequencies F S3 = 4.98 Hz, F S4 = 4.97 Hz and F S5 = 4.94 Hz after a transient phase occurring at the start of each moment of application of pulses of short circuit.
De manière remarquable, les mêmes fréquences de synchronisation ont été obtenues pour des fréquences de déclenchement des impulsions de court-circuit respectivement égales aux fréquences de déclenchement FDX, X = 1 à 5, mentionnées ci-avant, divisées par un nombre impair 2M-1, M étant un nombre entier positif supérieur à zéro, dans la mesure où le rapport entre la fréquence de synchronisation et la fréquence naturelle de l'oscillateur mécanique / la fréquence de consigne est comprise entre (K-1)/K et (K+1)/K avec K> 40·(2M-1). Des résultats similaires peuvent être obtenus avec une division par un nombre pair 2M et une condition semblable entre K et M, mais a priori il semble que dans ce dernier cas la synchronisation ne s'établisse pas de manière aussi efficace que pour un nombre impair, l'effet des impulsions de court-circuit étant moindre.Remarkably, the same synchronization frequencies were obtained for triggering frequencies of the short-circuit pulses respectively equal to the triggering frequencies F DX , X = 1 to 5, mentioned above, divided by an odd number 2M- 1, M being a positive integer greater than zero, insofar as the ratio between the synchronization frequency and the natural frequency of the mechanical oscillator / the set frequency is between (K-1) / K and (K +1) / K with K> 40 · (2M-1). Similar results can be obtained with a division by an even number 2M and a similar condition between K and M, but a priori it seems that in the latter case synchronization is not established as effectively as for an odd number, the effect of the short-circuit pulses being less.
Des observations et considérations précédentes, on déduit qu'il est possible de synchroniser un oscillateur mécanique, ayant un spiral piézo-électrique tel que décrit précédemment, en appliquant périodiquement des impulsions de court-circuit entre les deux électrodes de ce spiral, sur une fréquence proche de sa fréquence naturelle mais différente de cette dernière.From the preceding observations and considerations, it is deduced that it is possible to synchronize a mechanical oscillator, having a piezoelectric hairspring as described above, by periodically applying short-circuit pulses between the two electrodes of this hairspring, on a frequency close to its natural frequency but different from the latter.
Ainsi, si la fréquence naturelle s'écarte de la fréquence de consigne de manière usuelle, soit d'une seconde à environ une quinzaine de secondes par jour, on peut aisément synchroniser, par une régulation totalement en boucle ouverte, la fréquence de l'oscillateur mécanique sur la fréquence de consigne en appliquant de manière continue des impulsions de régulation distinctes telles que décrites précédemment avec une fréquence de déclenchement sélectionnée de manière appropriée. Cette application fait l'objet du premier mode de réalisation principal. En utilisant le signal de tension induite entre les électrodes du spiral lorsque le résonateur mécanique oscille, on peut aisément compter les périodes d'oscillation et déterminer une dérive temporelle, en particulier détecter lorsqu'une certaine dérive temporelle positive ou négative est atteinte, et ensuite on peut appliquer durant un certain moment de correction une pluralité d'impulsions de régulation distinctes telles que décrites précédemment avec une fréquence de déclenchement sélectionnée de manière appropriée pour synchroniser l'oscillation de l'oscillateur mécanique sur une fréquence de correction différente de la fréquence de consigne mais sélectionnée suffisamment proche de cette fréquence de consigne pour permettre une synchronisation, et pour ainsi corriger la dérive temporelle détectée. Cette application, que l'on peut considérer en boucle semi-ouverte ou semi-fermée, fait l'objet du deuxième mode de réalisation principal.Thus, if the natural frequency deviates from the set frequency in the usual way, that is to say from one second to about fifteen seconds per day, it is easy to synchronize, by totally open-loop regulation, the frequency of the mechanical oscillator on the set frequency by continuously applying separate control pulses as described above with a frequency of trigger selected appropriately. This application is the subject of the first main embodiment. By using the signal of induced voltage between the electrodes of the balance spring when the mechanical resonator oscillates, one can easily count the periods of oscillation and determine a temporal drift, in particular to detect when a certain positive or negative temporal drift is reached, and then it is possible to apply, during a certain correction moment, a plurality of distinct regulation pulses as described above with a trigger frequency appropriately selected to synchronize the oscillation of the mechanical oscillator with a correction frequency different from the frequency of setpoint but selected close enough to this setpoint frequency to allow synchronization, and thereby correct the detected time drift. This application, which can be considered in semi-open or semi-closed loop, is the subject of the second main embodiment.
A la
Le spiral piézoélectrique 8 est formé au moins partiellement par un matériau piézoélectrique et par au moins deux électrodes 20, 22 (voir
Le signal de commande Scom est un signal de fréquence ayant, dans une variante générale, une fréquence de déclenchement FD(N) = 2·F0c / N, le nombre N étant un nombre entier supérieur à zéro qui est sélectionné de manière que, pour un rapport entre une fréquence de dérive maximale dans le fonctionnement de l'oscillateur mécanique et la fréquence de consigne F0c compris entre (K-1) / K et (K+1) / K, ce nombre N est inférieur à K / 40, soit N < K / 40. Dans une variante avantageuse, le signal de commande Scom est un signal de fréquence qui présente une fréquence de déclenchement FD(M) = 2·F0c / (2M-1), le nombre M étant un nombre entier supérieur à zéro qui est sélectionné de manière que, pour un rapport entre une fréquence de dérive maximale dans le fonctionnement de l'oscillateur mécanique et la fréquence de consigne compris entre (K-1) / K et (K+1) / K, on a 2M-1 inférieur à K / 40, soit 2M-1 < K / 40. De préférence, les nombres N et M sont constants et prédéfinis pour la plage temporelle continue durant laquelle sont appliquées les impulsions de court-circuit qui définissent les impulsions de régulation.The control signal S com is a frequency signal having, in a general variant, a triggering frequency F D (N) = 2 · F0c / N, the number N being an integer greater than zero which is selected so that , for a ratio between a maximum drift frequency in the operation of the mechanical oscillator and the set frequency F0c between (K-1) / K and (K + 1) / K, this number N is less than K / 40, ie N <K / 40. In an advantageous variant, the control signal S com is a frequency signal which has a triggering frequency F D (M) = 2 · F0c / (2M-1), the number M being an integer greater than zero which is selected so that, for a ratio between a maximum drift frequency in the operation of the mechanical oscillator and the set frequency between (K-1) / K and (K + 1 ) / K, we have 2M-1 less than K / 40, that is 2M-1 <K / 40. Preferably, the numbers N and M are constants and predefined for the continuous time range during which the short-circuit pulses are applied which define the regulation pulses.
Le minuteur 58, à chaque impulsion du signal de commande, ferme l'interrupteur 60 (interrupteur passant et donc conducteur) durant un intervalle de temps TR, de sorte que les impulsions de court-circuit ont chacune une durée TR, laquelle est prévue de préférence inférieure au quart de la période de consigne T0c. Dans une variante avantageuse, la durée des impulsions de régulation est inférieure ou sensiblement égale à un dixième de la période de consigne T0c. On obtient ainsi durant la plage temporelle continue susmentionnée, après une phase transitoire éventuelle lors de l'activation du dispositif de régulation, une synchronisation continue de la fréquence de l'oscillateur mécanique sur la fréquence de consigne F0c.The
A la
A la
Le circuit électronique de régulation comprend un dispositif de mesure d'une dérive temporelle éventuelle dans la marche du mouvement horloger relativement à une fréquence de consigne pour l'oscillateur mécanique qui est déterminée par la base de temps auxiliaire 42,44. Le dispositif de mesure est formé par un comparateur à hystérèse 54 dont les deux entrées sont reliées aux deux électrodes 20,22 du spiral piézoélectrique 8. On remarquera que dans l'exemple donné, l'électrode 20 est reliée électriquement à une entrée du comparateur 54 via la masse du dispositif de régulation. Le comparateur à hystérèse fournit un signal digital 'Comp' (voir
Le signal 'Comp' est fourni à une première entrée 'Up' d'un compteur bidirectionnel CB formant le dispositif de mesure. Le compteur bidirectionnel est ainsi incrémenté d'une unité à chaque période d'oscillation de l'oscillateur mécanique (notamment à chaque flanc montant du signal). Il reçoit donc en continu une mesure de la fréquence d'oscillation instantanée de l'oscillateur mécanique. Le compteur bidirectionnel reçoit à sa deuxième entrée 'Down' un signal d'horloge Shor fourni par le diviseur de fréquence DIV1 & DIV2, ce signal d'horloge correspondant à une fréquence de consigne F0c pour l'oscillateur mécanique qui est déterminée par l'oscillateur auxiliaire de la base de temps auxiliaire. Ainsi, le compteur bidirectionnel fournit au circuit logique de commande 56 un signal SDT correspondant à une erreur cumulée au cours du temps entre la fréquence d'oscillation de l'oscillateur mécanique et la fréquence de consigne, cette erreur cumulée définissant la dérive temporelle de l'oscillateur mécanique relativement à l'oscillateur auxiliaire.The signal 'Comp' is supplied to a first input 'Up' of a bidirectional counter CB forming the measuring device. The bidirectional counter is thus incremented by one unit at each period of oscillation of the mechanical oscillator (in particular at each rising edge of the signal). It therefore continuously receives a measurement of the instantaneous oscillation frequency from the mechanical oscillator. The bidirectional counter receives at its second input 'Down' a clock signal S hor supplied by the frequency divider DIV1 & DIV2, this clock signal corresponding to a set frequency F0c for the mechanical oscillator which is determined by l auxiliary time base auxiliary oscillator. Thus, the bidirectional counter supplies the
Ensuite, le dispositif de régulation 62 comprend un interrupteur 60 formé par un transistor et agencé entre les deux électrodes 20, 22 du spiral 8, cet interrupteur étant commandé par le circuit logique de commande 56 qui est agencé pour pouvoir fermer, via un minuteur 58, momentanément cet interrupteur de manière à le rendre passant / conducteur durant les impulsions de régulation, lesquelles définissent alors des impulsions de court-circuit. Le circuit de commande fournit sélectivement un signal de commande Scom au minuteur 58 qui, en réponse à ce signal de commande, commande la fermeture momentanée du transistor 60 en lui appliquant un signal Scc. Plus précisément, le circuit de commande détermine l'instant du début de chaque impulsion de court-circuit en déclenchant ou réinitialisant le minuteur ('Timer') qui rend directement passant / conducteur le transistor 60 (interrupteur fermé), le minuteur déterminant la durée TR de chaque impulsion de court-circuit. A la fin de chaque impulsion de court-circuit, le minuteur ouvre à nouveau l'interrupteur de sorte que le transistor 60 n'est plus passant, c'est-à-dire qu'il redevient non conducteur. Dans une variante générale, les impulsions de régulation ont chacune une durée inférieure au quart de la période de consigne T0c qui est égale à l'inverse de la fréquence de consigne pour l'oscillateur mécanique. Dans une variante de réalisation préférée, la durée des impulsions de régulation est inférieure ou sensiblement égale à un dixième d'une période de consigne.Next, the regulating
Le circuit électronique 62a comprend en outre un circuit d'alimentation 66 du dispositif de régulation, lequel a déjà été décrit précédemment.The
Le procédé de régulation selon le deuxième mode de réalisation principal, mis en oeuvre par le dispositif de régulation 62 et implémenté dans le circuit logique de commande 56, est exposé ci-après. Le circuit logique de commande est agencé pour pouvoir déterminer si une dérive temporelle mesurée par le dispositif de mesure correspond à au moins une certaine avance (CB > N1) ou à au moins un certain retard (CB < - N2), N1 et N2 étant des nombres entiers positifs. Le dispositif de régulation, en particulier son circuit logique de commande, est agencé pour sélectionner, avant chaque moment de correction distinct prévu, pour la période de régulation Treg telle que définie précédemment, selon qu'au moins une certaine dérive temporelle positive ou négative est détectée, respectivement une première période de correction Tcor1 qui est supérieure à la période de consigne T0c ou une deuxième période de correction Tcor2 qui est inférieure à la période de consigne, chacun des moments de correction étant prévu avec une durée suffisante à l'établissement d'une phase synchrone dans laquelle la fréquence de l'oscillateur mécanique est synchronisée soit sur une première fréquence de correction Fcor1 = 1/Tcor1 lorsque ladite au moins une certaine dérive temporelle positive est détectée avant le moment considéré, soit sur une deuxième fréquence de correction Fcor2 = 1/ Tcor2 lorsque ladite au moins une certaine dérive temporelle négative est détectée avant le moment considéré, de sorte à corriger la dérive temporelle détectée.The regulation method according to the second main embodiment, implemented by the
Dans une variante avantageuse, le circuit logique de commande 56 est agencé de manière que la distance temporelle DT entre deux impulsions de court-circuit, dans chaque moment de correction distinct, est égale à un nombre impair 2M - 1 multiplié par la moitié de la période de régulation Treg déterminée pour chacun des moments de correction, soit une relation mathématique DT = (2M-1)·Treg /2, M étant un nombre entier positif supérieur à zéro, la période de régulation Treg et le nombre M étant sélectionnés de manière à permettre une synchronisation de l'oscillateur mécanique sur une fréquence de régulation Freg = 1 /Treg au cours de chacun des moments de correction.In an advantageous variant, the
Dans une variante particulière, lorsque ladite au moins une certaine dérive temporelle positive ou négative est détectée par le circuit logique de commande 56, le dispositif de régulation 62 est agencé pour appliquer périodiquement, durant le moment de correction suivant, une pluralité d'impulsions de régulation correspondante avec respectivement une première fréquence de déclenchement FINF= 2·Fcor1/N ou une deuxième fréquence de déclenchement FSUP=2·Fcor2/N. Le nombre N est de préférence prévu constant au cours de chaque moment de correction et il est soit prédéterminé, soit déterminé avant le moment de correction suivant considéré.In a particular variant, when said at least some positive or negative time drift is detected by the
De manière à assurer la synchronisation voulue au cours de chacun des moments de correction, il est avantageusement prévu que, pour chacun des moments de correction où intervient la première fréquence de déclenchement FINF, cette dernière est prévue supérieure à une première fréquence limite FL1(N,K)=[(K-1)/K]·2·F0c/N avec K>40·N, et, pour chacun des moments de correction où intervient la deuxième fréquence de déclenchement FSUP, cette dernière est prévue inférieure à une deuxième fréquence limite FL2(N,K) = [(K+1)/K]·2·F0c/N avec K> 40·N.In order to ensure the desired synchronization during each of the correction moments, it is advantageously provided that, for each of the correction moments where the first trigger frequency F INF occurs, the latter is provided greater than a first limit frequency F L1 (N, K) = [(K-1) / K] · 2 · F0c / N with K> 40 · N, and, for each of the correction moments where the second trip frequency F SUP occurs, the latter is provided less than a second limiting frequency F L2 (N, K) = [(K + 1) / K] · 2 · F0c / N with K> 40 · N.
Dans une variante spécifique, le nombre entier N est prévu plus petit dans une phase initiale que dans une phase finale de chacun des moments de correction, de manière à diminuer au mieux la phase transitoire initiale.In a specific variant, the integer N is expected to be smaller in an initial phase than in a final phase of each of the correction moments, so as to best reduce the initial transient phase.
Dans une variante préférée, lorsque ladite au moins une certaine dérive temporelle positive ou négative est détectée par le circuit logique de commande 56, le dispositif de régulation 62 est agencé pour appliquer périodiquement, durant le moment de correction suivant, une pluralité d'impulsions de régulation correspondante avec respectivement une première fréquence de déclenchement FINF= 2·Fcor1/(2M - 1) ou une deuxième fréquence de déclenchement FSUP=2·Fcor2/(2M-1). En particulier, le nombre M est prévu constant au cours de chaque moment de correction et il est soit prédéterminé, soit déterminé avant le moment de correction suivant considéré.In a preferred variant, when said at least some positive or negative time drift is detected by the
De manière à assurer la synchronisation voulue au cours de chacun des moments de correction, il est avantageusement prévu que, pour chacun des moments de correction où intervient la première fréquence de déclenchement FINF, cette dernière est prévue supérieure à une première fréquence limite FL1 (M, K) = [(K-1)/K]·2·F0c/(2M -1) avec K>40·(2M-1), et, pour chacun des moments de correction où intervient la deuxième fréquence de déclenchement FSUP, cette dernière est prévue inférieure à une deuxième fréquence limite FL2(M,K) = [(K+1)/K]·2·F0c/(2M - 1) avec K>40·(2M-1).In order to ensure the desired synchronization during each of the correction moments, it is advantageously provided that, for each of the correction moments where the first trigger frequency F INF occurs, the latter is provided greater than a first limit frequency F L1 (M, K) = [(K-1) / K] · 2 · F0c / (2M -1) with K> 40 · (2M-1), and, for each of the correction moments where the second frequency of F SUP trigger, the latter is expected to be less than one second limiting frequency F L2 (M, K) = [(K + 1) / K] · 2 · F0c / (2M - 1) with K> 40 · (2M-1).
Dans une variante spécifique, de manière à diminuer au mieux la phase transitoire initiale dans chaque moment de correction, il est prévu de déterminer le début d'une première impulsion de régulation, parmi la pluralité d'impulsions de régulation prévue pour le moment de correction considéré, relativement à la position angulaire de l'oscillateur mécanique. A cet effet, le signal 'Comp' est aussi fourni au circuit logique de commande 56. Dans cette variante spécifique, la première impulsion de régulation est déclenchée par un flanc montant ou un flanc descendant du signal 'Comp'.In a specific variant, so as to best reduce the initial transient phase in each correction moment, provision is made for determining the start of a first regulation pulse, from among the plurality of regulation pulses provided for the correction moment considered, relative to the angular position of the mechanical oscillator. For this purpose, the signal 'Comp' is also supplied to the
A l'aide de la
Dans la variante particulière représentée à la
Claims (20)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18197529.3A EP3629103B1 (en) | 2018-09-28 | 2018-09-28 | Timepiece comprising a mechanical movement of which the oscillation precision is regulated by an electronic device |
| US16/572,996 US11619910B2 (en) | 2018-09-28 | 2019-09-17 | Timepiece including a mechanical movement whose operation is controlled by an electronic device |
| JP2019171186A JP6854329B2 (en) | 2018-09-28 | 2019-09-20 | A timekeeper containing a mechanical movement whose operation is controlled by an electronic device |
| CN201910924692.1A CN110967959B (en) | 2018-09-28 | 2019-09-27 | Timepiece including a mechanical movement whose operation is controlled by electronic means |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18197529.3A EP3629103B1 (en) | 2018-09-28 | 2018-09-28 | Timepiece comprising a mechanical movement of which the oscillation precision is regulated by an electronic device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3629103A1 true EP3629103A1 (en) | 2020-04-01 |
| EP3629103B1 EP3629103B1 (en) | 2021-05-12 |
Family
ID=63708249
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18197529.3A Active EP3629103B1 (en) | 2018-09-28 | 2018-09-28 | Timepiece comprising a mechanical movement of which the oscillation precision is regulated by an electronic device |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11619910B2 (en) |
| EP (1) | EP3629103B1 (en) |
| JP (1) | JP6854329B2 (en) |
| CN (1) | CN110967959B (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113411135A (en) * | 2021-07-12 | 2021-09-17 | 上海交通大学 | Probability shaping polarization code method and system based on density transmission in FSO (free space optical access) |
| CN115437231A (en) * | 2021-06-02 | 2022-12-06 | 斯沃奇集团研究和开发有限公司 | Timepiece movement provided with an oscillator including a piezoelectric balance spring |
| EP4130890A1 (en) | 2021-08-04 | 2023-02-08 | The Swatch Group Research and Development Ltd | Timepiece movement provided with an oscillator comprising a piezoelectric hairspring |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4194960A1 (en) | 2021-12-10 | 2023-06-14 | The Swatch Group Research and Development Ltd | Piezoelectric spiral spring and method for manufacturing said spiral spring |
| DE102023104606A1 (en) | 2023-02-24 | 2024-08-29 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Amorphous seed layer for the production of piezoelectric layers |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1164441A1 (en) * | 1999-12-24 | 2001-12-19 | Seiko Instruments Inc. | Mechanical timepiece having train wheel operation controller |
| JP2002228774A (en) * | 2001-01-30 | 2002-08-14 | Seiko Epson Corp | Piezoelectric speed governor and electronic equipment using the piezoelectric speed governor |
| US20130051191A1 (en) | 2010-04-21 | 2013-02-28 | Team Smartfish Gmbh | Controller for a clockwork mechanism, and corresponding method |
| CH705679A2 (en) * | 2011-10-28 | 2013-04-30 | Swatch Group Res & Dev Ltd | Circuit self-regulation of the oscillation frequency of an oscillating mechanical system, and device comprising it. |
| US20150051191A1 (en) | 2013-08-15 | 2015-02-19 | Medicinova, Inc. | Treatment of alcoholism using ibudilast |
| EP2908187A1 (en) * | 2014-02-17 | 2015-08-19 | The Swatch Group Research and Development Ltd. | Adjustment of a clock piece resonator by changing the active length of a hairspring |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3781955A (en) * | 1970-12-21 | 1974-01-01 | V Lavrinenko | Method of making a piezoelectric element |
| JPS58179379A (en) * | 1982-04-15 | 1983-10-20 | Shiojiri Kogyo Kk | Electronic timepiece |
| JP2000121756A (en) * | 1998-10-13 | 2000-04-28 | Seiko Epson Corp | Electronically controlled mechanical clock |
| CN1348555A (en) * | 1999-06-29 | 2002-05-08 | 精工电子有限公司 | Mechanical timepiece having train wheel operation controller |
| JP4070011B2 (en) | 2002-08-06 | 2008-04-02 | キヤノン化成株式会社 | Method of manufacturing foamed conductive rubber roller for image forming apparatus and transfer roller |
| EP2224293B1 (en) | 2003-04-29 | 2012-07-18 | Patek Philippe SA Genève | Balance and flat hairspring regulator for a watch movement |
| CH697207A5 (en) | 2003-04-29 | 2008-06-25 | Patek Philippe Sa | Horological movement for timepiece i.e. watch, has control unit with spring, where space between end part and spring's turn is large so that penultimate turn is free when spiral expands till amplitude corresponding to maximum rotation angle |
| ATE363676T1 (en) * | 2003-10-01 | 2007-06-15 | Asulab Sa | CLOCK WITH A MECHANICAL MOVEMENT COUPLED WITH AN ELECTRONIC REGULATOR |
| EP1605323A3 (en) | 2004-04-13 | 2006-07-12 | Coredem S.A. | Spiral spring for mechanical clockwork |
| JP5613056B2 (en) | 2007-11-28 | 2014-10-22 | マニュファクチュール エ ファブリック ドゥ モントル エ クロノメートル ユリース ナルダン ル ロクル エス.アー.Manufacture Et Fabrique De Montres Et Chronometres Ulysse Nardin Le Locles.A. | Mechanical vibrator with optimized thermoelastic coefficient |
| DE102009005357A1 (en) | 2008-12-04 | 2010-08-05 | Konrad Damasko | Functional element e.g. spiral or balance-spring of mechanical oscillation system for wrist watch, involves subjecting functional elements to carbon-diffusion-treatment with predetermined atmospheric pressure |
| US20130203595A1 (en) | 2009-11-24 | 2013-08-08 | Syngenta Crop Protection Llc | Stable mixtures and related methods |
| EP2565727A1 (en) * | 2011-09-05 | 2013-03-06 | Nivarox-FAR S.A. | Method for forming a clock balance wheel-hairspring assembly and adjusting the oscillation frequency |
| WO2015113973A1 (en) | 2014-01-29 | 2015-08-06 | Cartier Création Studio Sa | Thermally compensated hairspring made from ceramic comprising silicon in the composition of same and method for adjusting same |
| EP2908188B1 (en) | 2014-02-17 | 2018-06-27 | The Swatch Group Research and Development Ltd. | Adjustment of a clock piece resonator by changing the rigidity of a resilient return means |
| CH709281A2 (en) * | 2014-02-17 | 2015-08-28 | Swatch Group Res & Dev Ltd | Clockwork resonator mechanism comprising an oscillating member carrying an oscillating regulator device. |
| EP3457223A1 (en) * | 2017-09-14 | 2019-03-20 | The Swatch Group Research and Development Ltd | Piezoelectric element for a frequency self-regulation circuit, and oscillating mechanical system and device including the same |
| EP3540528B1 (en) * | 2018-03-16 | 2020-08-05 | The Swatch Group Research and Development Ltd | Timepiece comprising a mechanical movement the oscillating rate of which is controlled by an electronic device |
| EP3629104B1 (en) * | 2018-09-27 | 2021-05-12 | The Swatch Group Research and Development Ltd | Mechanical timepiece comprising an electronic device for regulating the time keeping precision of the timepiece |
-
2018
- 2018-09-28 EP EP18197529.3A patent/EP3629103B1/en active Active
-
2019
- 2019-09-17 US US16/572,996 patent/US11619910B2/en active Active
- 2019-09-20 JP JP2019171186A patent/JP6854329B2/en active Active
- 2019-09-27 CN CN201910924692.1A patent/CN110967959B/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1164441A1 (en) * | 1999-12-24 | 2001-12-19 | Seiko Instruments Inc. | Mechanical timepiece having train wheel operation controller |
| JP2002228774A (en) * | 2001-01-30 | 2002-08-14 | Seiko Epson Corp | Piezoelectric speed governor and electronic equipment using the piezoelectric speed governor |
| US20130051191A1 (en) | 2010-04-21 | 2013-02-28 | Team Smartfish Gmbh | Controller for a clockwork mechanism, and corresponding method |
| CH705679A2 (en) * | 2011-10-28 | 2013-04-30 | Swatch Group Res & Dev Ltd | Circuit self-regulation of the oscillation frequency of an oscillating mechanical system, and device comprising it. |
| US20150051191A1 (en) | 2013-08-15 | 2015-02-19 | Medicinova, Inc. | Treatment of alcoholism using ibudilast |
| EP2908187A1 (en) * | 2014-02-17 | 2015-08-19 | The Swatch Group Research and Development Ltd. | Adjustment of a clock piece resonator by changing the active length of a hairspring |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115437231A (en) * | 2021-06-02 | 2022-12-06 | 斯沃奇集团研究和开发有限公司 | Timepiece movement provided with an oscillator including a piezoelectric balance spring |
| EP4099100A1 (en) | 2021-06-02 | 2022-12-07 | The Swatch Group Research and Development Ltd | Timepiece movement provided with an oscillator comprising a piezoelectric hairspring |
| CN113411135A (en) * | 2021-07-12 | 2021-09-17 | 上海交通大学 | Probability shaping polarization code method and system based on density transmission in FSO (free space optical access) |
| EP4130890A1 (en) | 2021-08-04 | 2023-02-08 | The Swatch Group Research and Development Ltd | Timepiece movement provided with an oscillator comprising a piezoelectric hairspring |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020056784A (en) | 2020-04-09 |
| JP6854329B2 (en) | 2021-04-07 |
| CN110967959B (en) | 2021-11-02 |
| EP3629103B1 (en) | 2021-05-12 |
| US11619910B2 (en) | 2023-04-04 |
| US20200103826A1 (en) | 2020-04-02 |
| CN110967959A (en) | 2020-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3629103B1 (en) | Timepiece comprising a mechanical movement of which the oscillation precision is regulated by an electronic device | |
| EP3540528B1 (en) | Timepiece comprising a mechanical movement the oscillating rate of which is controlled by an electronic device | |
| EP3629104B1 (en) | Mechanical timepiece comprising an electronic device for regulating the time keeping precision of the timepiece | |
| FR2652960A1 (en) | POWER SUPPLY CIRCUIT FOR A PIEZOELECTRIC TRANSDUCER. | |
| EP2668716B1 (en) | Circuit for optimizing the recovery of vibratory energy by a mechanical/electrical converter | |
| EP3502798B1 (en) | Timepiece comprising a mechanical oscillator associated with a control system | |
| EP3620867B1 (en) | Timepiece comprising a mechanical oscillator whose average frequency is synchronised to that of a reference electronic oscillator | |
| FR2752312A1 (en) | METHOD AND CIRCUIT FOR DYNAMICALLY ADJUSTING THE SUPPLY VOLTAGE AND OR THE FREQUENCY OF THE CLOCK SIGNAL IN A DIGITAL CIRCUIT | |
| EP3410236A1 (en) | Device and method for adjusting the rate and correcting the state of a watch | |
| EP3457224B1 (en) | Piezoelectric element for a frequency self-regulation circuit, oscillating mechanical system and device including the same, and method for manufacturing the piezoelectric element | |
| EP3457223A1 (en) | Piezoelectric element for a frequency self-regulation circuit, and oscillating mechanical system and device including the same | |
| FR2634957A1 (en) | CUK TYPE CONTINUOUS / CONTINUOUS VOLTAGE CONVERTER AND DIRECT CONVERSION AREA POWER SUPPLY REALIZED FROM SUCH CONVERTER | |
| EP3502796B1 (en) | Timepiece comprising a mechanical oscillator associated with a control system | |
| EP3502797B1 (en) | Timepiece comprising a mechanical oscillator associated with a control system | |
| CH715392A2 (en) | Timepiece comprising a mechanical movement, the progress of which is regulated by an electronic device. | |
| EP4130890B1 (en) | Timepiece movement provided with an oscillator comprising a piezoelectric hairspring | |
| CH714794A2 (en) | Timepiece comprising a mechanical movement whose movement is regulated by an electronic device. | |
| EP4099100A1 (en) | Timepiece movement provided with an oscillator comprising a piezoelectric hairspring | |
| CH718897A2 (en) | Watch movement equipped with an oscillator comprising a piezoelectric hairspring. | |
| EP4009119B1 (en) | Timepiece movement provided with a generator and a circuit for controlling the frequency of rotation of said generator | |
| EP0848306B1 (en) | Time piece having an electric energy generator | |
| EP1014230B1 (en) | Timepiece having an electrical energy generator | |
| CH715295A2 (en) | Timepiece including a mechanical oscillator whose average frequency is synchronized with that of a reference electronic oscillator. | |
| CH718689A2 (en) | Watch movement fitted with an oscillator comprising a piezoelectric hairspring. | |
| CH714143A2 (en) | Piezoelectric element for a frequency self-regulating circuit, and oscillating mechanical system and device comprising same. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20201001 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20201210 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602018016973 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1392582 Country of ref document: AT Kind code of ref document: T Effective date: 20210615 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1392582 Country of ref document: AT Kind code of ref document: T Effective date: 20210512 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20210512 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210812 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210913 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210812 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210912 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210813 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602018016973 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20220215 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210912 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210928 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210928 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210930 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20220928 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230615 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20180928 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220928 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20231001 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210512 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240820 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240820 Year of fee payment: 7 |