EP3570431A1 - Moteur et dispositif de commande associé - Google Patents
Moteur et dispositif de commande associé Download PDFInfo
- Publication number
- EP3570431A1 EP3570431A1 EP17876042.7A EP17876042A EP3570431A1 EP 3570431 A1 EP3570431 A1 EP 3570431A1 EP 17876042 A EP17876042 A EP 17876042A EP 3570431 A1 EP3570431 A1 EP 3570431A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- current
- rotor
- motor
- stator
- windings
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/32—Arrangements for controlling wound field motors, e.g. motors with exciter coils
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/26—Power factor control [PFC]
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K17/00—Asynchronous induction motors; Asynchronous induction generators
- H02K17/02—Asynchronous induction motors
- H02K17/34—Cascade arrangement of an asynchronous motor with another dynamo-electric motor or converter
- H02K17/40—Cascade arrangement of an asynchronous motor with another dynamo-electric motor or converter with a rotary AC/DC converter
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/0086—Arrangements or methods for the control of AC motors characterised by a control method other than vector control specially adapted for high speeds, e.g. above nominal speed
- H02P23/009—Arrangements or methods for the control of AC motors characterised by a control method other than vector control specially adapted for high speeds, e.g. above nominal speed using field weakening
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/08—Reluctance motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/16—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the circuit arrangement or by the kind of wiring
- H02P25/22—Multiple windings; Windings for more than three phases
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P9/00—Arrangements for controlling electric generators for the purpose of obtaining a desired output
- H02P9/14—Arrangements for controlling electric generators for the purpose of obtaining a desired output by variation of field
- H02P9/26—Arrangements for controlling electric generators for the purpose of obtaining a desired output by variation of field using discharge tubes or semiconductor devices
- H02P9/30—Arrangements for controlling electric generators for the purpose of obtaining a desired output by variation of field using discharge tubes or semiconductor devices using semiconductor devices
- H02P9/302—Brushless excitation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2207/00—Indexing scheme relating to controlling arrangements characterised by the type of motor
- H02P2207/05—Synchronous machines, e.g. with permanent magnets or DC excitation
Definitions
- the present invention concerns with a technique for motors which can be applied to applications which need a large peak of torque, applications need constant output control under weakened field control or application which need both such torture and control.
- the present invention concerns with motors for main machines mounted in electric vehicles EV, industrial motors, motors for aircrafts.
- the present invention provides motors and control apparatuses therefor, which are able to control both amplitudes of field magnetic fluxes and torque, and more practically, motors and control apparatuses therefor, which almost generate an armature reaction during generation of a large peak of torque.
- Interior Permanent Magnet motors are used as main-machine motors for hybrid vehicles and industrial motors. It is expected in the future that such motors will be mounted widely on compact-size and large-size electric vehicles.
- That problem comes from operating points which are in an area "A" in Fig. 27 , which shows a characteristic defined by rotation speeds V and torque amounts T in Fig. 27 .
- This characteristic which is a constant output characteristic and is defined the torque amounts T taken along an axis of ordinate and the rotation speeds V taken along an axis of abscissa.
- a power factor reduces down to 0.6
- a motor current increases 1.666 times and a motor copper loss increases 2.777 times, compared with comparison with those factors provided when the motor has a power factor of 1.
- the motor suffers from being lowered power efficiency, thereby making the motor larger in size in order to secure a desired power efficiency and increasing production cost thereof.
- an inverter which drives the motor cannot be avoided from being larger in size.
- the vehicle-mounted motor needs a higher-speed rotation, in which it is difficult to freely perform weakened field control of the motor.
- the motor voltage tends to be excessively larger, which can be seen an operating point in a range B in Fig. 27 .
- a driving inverter is forced to have a larger load, thereby reducing the power factor and raising the size and production cost thereof.
- the field magnetic fluxes should be as larger as possible, whilst, in a higher-speed rotation of the motor, the field magnetic fluxes should be as lesser as possible. This means that, in these two driving modes, the field magnetic fluxes is desired to be controlled under mutually conflicting characteristics.
- interior permanent magnet motors have a drawback which results from positional changes in the field magnetic fluxes in the circumferential direction.
- Such positional changes are due to an armature reaction which is caused by torque current components.
- Another cause for such positional changes is due to the fact that, since the motors have many permanent magnets to increase a motor power efficacy, the field magnetic fluxes should be weakened in a controlled manner in a higher-speed rotation range.
- the armature reaction brings an adverse effect, which is for example a distribution of the field magnetic fluxes becomes ununiform in the circumferential direction due to electromagnetic actions which are attributable to torque current comments.
- Fig. 29 shows a modelized representation of an induction motor.
- the induction motor has a lower power factor and a lower power efficiency due to copper loss of rotor windings thereof.
- the induction motor is higher resistance to an external force, does not permanent magnets which are usually higher in cost, and can usually be supplied at inexpensive cost thanks to mass production.
- a point which should be focused on the induction motor is that the induction motor generates no armature reaction and has superior characteristics for constant output control and higher-speed rotation drive based on controlling weakened field fluxes.
- That motor is a two-pole motor, in which a reference number 251 shows a stator, a reference number 252 shows a rotor, and reference numbers 253 and 254 show field current components Id which generate field magnetic fluxes ⁇ a shown by reference numbers 25B and 255.
- the field current components cause field magnetic fluxes to be rotated in the circumferential direction at a speed faster than a rotor rotation speed Vr by a slipping velocity Vs.
- a voltage is generated through q-axis windings, in which the generated voltage is proportional to both the slipping velocity Vs in the counterclockwise direction CCW and the field magnetic fluxes ⁇ a, whereby secondary currents 256 and 257 pass though in the rotor.
- the field current components Id are provided by field windings connected with a voltage source whose power impedance is low, such as, a commercial power of three-phase, 50/60 Hz and 200V.
- the q-axis current components Iq which are shown by reference numbers 258 and 259, are fed so as to compensate for a decrease in the field magnetic fluxes ⁇ a owing to the rotor secondary currents 256 and 257.
- the rotor secondary currents 256 and 257 and the q-axis current components Iq are equal in current amounts and mutually oppose in their current directions.
- the induction motor generates an amount of torque T in the CCW direction shown by an arrow 25A, which torque amount is proportional to both the field magnetic fluxes ⁇ a and the rotor secondary currents 256 and 257.
- a point of note in this motor is that a round integration of strength of a magnetic field along one magnetic path 25C becomes zero and equals to a sum of those caused by current components 258 and 256, which means that a magnetic component along such directions is zero, whereby there is caused no armature reaction. In parallel, a magnetic component along the other magnetic path 25D becomes zero, thereby causing no armature reaction.
- the induction motor has a magnetic isotropy in all the directions, so that it can be explained that if there occurs an armature reaction, the motor cannot be operated as a motor. This point is different from motors which use reluctance torque.
- the induction motor has an ideal operation, but, as a mater of fact, the induction motor is confronted with some difficulties, such as a limited peak amount of torque and a lower power factor.
- the former difficulty comes from, as one reason, generation of a phase delay of the rotor second currents 256 and 257 due to a winding inductance, while the latter difficulty results from the field current components Id and the phase delay.
- the motor efficiency is obliged from being lowered, while the motor becomes larger in size for desired performance.
- a winding resistance value Rr of the rotor is an important parameter. However, this winding resistance value Rr changes largely with fluctuations in the temperature, which is difficult to be controlled. In addition, the rotor currents or the field magnetic fluxes are also difficult to be detected.
- motors serving as main machine in the electric vehicles have higher characteristics for both generation of larger torque and higher power factors in lower rotation speeds required when the vehicles climb up steeper roads, and generation of weakened field when the vehicles run at higher rotation speeds.
- Objects of the present invention are thus to realize a motor and a control apparatus therefor which can obtain larger torque output at higher power efficiencies and which avoid the motor voltage from being excessive in a higher rotation speed range. In parallel, it is also required to make the motor and the control apparatus smaller in size, lesser in weight and lower in manufacturing cost.
- motors which do not generate an armature reaction, which are able to concentrate magnetic fluxes the airgap or an area near thereat in the circumferential direction, and which are able to output lager amounts of torque which is largely higher than conventional torque values.
- motors whose field magnetic fluxes can be controlled easily, and whose weakened field results in constant output control and whose ration control is also possible in higher rotation speeds.
- a motor and a control device characterized in that, the motor and the control device comprise: a multiple-phase stator windings SW arranged in a stator, the stator windings being arranged in a circumferential periphery of the stator, the circumferential periphery being opposed to a stator; a rotor winding RW arranged in the rotor, the rotor winding being arranged in a circumferential periphery of the rotor, the circumferential periphery of the rotor being opposed to the stator; stator current supplying means MSC which supply a current SIG to the stator windings SW; rotor current supplying means MRC which supply a current RIG to the rotor; and current control means MCC which control the current SIG to the stator windings SW and the current RIG to the rotor winding RW, wherein a flowing direction of the current SIG and a flowing direction of the current RIG
- the armature reaction can be removed or reduced, so that larger amounts of torque can be outputted. Accordingly, there can be provided a motor and a control device which are good in weakening the field in a higher rotation range and a control device
- the motor and the control device are characterized in that the rotor current supplying means MRC comprises a rotary transformer RTT or an AC generator AG which supplies the rotor current; and a rectifying device REC1 which rectifies an output AC voltage and an output AC current to a DC rotor current.
- the rotor current supplying means MRC comprises a rotary transformer RTT or an AC generator AG which supplies the rotor current; and a rectifying device REC1 which rectifies an output AC voltage and an output AC current to a DC rotor current.
- the rotor current can be supplied by a simplified structure of the motor, with improved reliability due to non-contact current supply.
- the motor and the control device are characterized in that the rotor current supplying means MRC are configured to supply the rotor current based on the current generated by the stator current supplying means MSC and supplied to the stator windings SW.
- the rotor current can be supplied by a simplified structure of the motor.
- the motor and the control device are characterized in that the rotor current supplying means MRC comprises a stator power-supplying winding PSW which excites a AC magnetic flux component, which is present in the stator at pitches, the pitches being defined by multiplying an electrical angle 360 degrees by QN times, the QN being an integer of 2 or more; a rotor power-receiving winding PRW which receives power for the rotor, the power-receiving winding being arranged in the rotor in a circumferential direction thereof and arranged at pitches, the pitches being defined by multiplying an electrical angle 360 degrees by an integer number; and a rectifying device REC2 which rectifies an AC voltage and an AC current of the received power to a DC rotor current.
- the rotor current supplying means MRC comprises a stator power-supplying winding PSW which excites a AC magnetic flux component, which is present in the stator at pitches, the pitches being defined by multiplying an electrical angle 360 degrees by QN times, the QN being an integer of
- the winding structure of the stator can be used partly to supply the rotor current, thus simplifying the motor configuration and improved reliability due to non-contact current supply.
- the motor and the control device are characterized in that the current control means MCC are configured to control the currents such that a sum IWSP of torque current components of the stator and a sum IWRM of toque current components of the rotor, the toque current components of the rotor being opposed to the torque current components of the stator via an airgap and energized.
- This configuration makes it possible to arbitrarily increase or decrease the field current component to the motor, thus realizing output of larger amounts of torque or faster rotation drive.
- the motor and the control device are characterized in that the current control means MCC are configured to control a current phase ⁇ i of the stator to a circumferential position ⁇ r of the rotor winding RW.
- This configuration makes it possible to arbitrarily increase or decrease the field current component to the motor, thus realizing output of larger amounts of torque or faster rotation drive.
- the motor and the control device are characterized in that the current control means MCC are configured to:
- the motor and the control device are characterized in that the rotary transformer RTT is provided with a stator-side rotary transformer RTS provided with a position sensor SPS which detects a rotor position of the rotor, and the rotary transformer RTT is also provided with a rotor-side rotary transformer RTR provided with a portion which detects a position of the rotor, the portion including a portion having a small magnetic resistance and a potion having a magnetic resistance which is larger than the small magnetic resistance.
- This configuration makes it possible to detect a rotor rotation position using a part of the rotary transformer RTT supplying the rotor current.
- the motor and the control device are characterized in that the motor and the control device comprises: power supplying means MSP which supply power to the rotor, the power supplying means MSP being a part of the rotor current supplying means MRC; and current control means RCC which is a part of the rotor current supplying means.
- This configuration enables more accurate supply of the rotor current and faster control of the rotor current.
- the motor according to the present invention has features as follows. No armature reaction is caused, or the armature reaction can be reduced largely. Circumferential magnetic fluxes can be collected to the airgap or a portion near to the airgap, thus a magnetic flux density in the airgap or the portion near to the airgap in the circumferential direction. Accordingly, torque whose amount is greatly larger than the congenital motor can be outputted, and a greater motor output density can also be provided. In addition, field weakening control can be performed more accurately and reliably, thereby realizing higher-level constant output control of the motor.
- the motor voltage can be controlled so as not to allow the motor voltage to be excessive in a high rotation range of the motor, to improve both a power factor in the high rotation range and toque output. Accordingly, such advantages can contribute to high performance, more compact design, weight saving, and/or lower-cost manufacturing of products such as motors for main machines mounted in electric vehicles EV.
- Fig. 1 shows a lateral sectional view of a motor provided according to the present invention.
- a two-pole synchronous motor in which a reference number 11 indicates a stator and a reference number 12 indicates a rotor.
- the stator has ten slots and the rotor also has ten slots.
- the stator has concentrated windings which are composed of five-phase and full-pitch windings.
- a reference symbol SA indicates an A-phase winding of the stator, which is a part of a circulated winding which is also wound as a winding SA/ located on the 180-degree opposite side of the stator to the winding SA, such the A-phase windings are wound at pitches defined by an electrical angle of 180 degrees in the circumferential direction.
- an A-phase current Ia is suppled, so that an oppositely directed current -Ia flows through the winding SA/.
- a reference symbol SB indicates a B-phase winding of the stator to which a B-phase current Ib is supplied, so that an opposite-side winding SB/ is subjected to supply of -Ib, which is circulated through both the B-phase windings.
- a reference symbol SC indicates a C-phase winding of the stator to which a C-phase current Ic is supplied, so that an opposite-side winding SC/ is subjected to supply of -Ic, which is circulated through both the B-phase windings.
- a reference symbol SD indicates a D-phase winding of the stator to which a D-phase current Id is supplied, so that an opposite-side winding SD/ is subjected to supply of -Id, which is circulated through both the C-phase windings.
- a reference symbol SE indicates an E-phase winding of the stator to which an E-phase current Ie is supplied, so that an opposite-side winding SE/ is subjected to supply of -Ie, which is circulated through both the E-phase windings.
- Supply currents to the stator windings of the motor according to the present invention can be realized by various driving methods, which include a driving method which uses sinusoidal-wave voltages and currents, a driving method which uses rectangular-wave voltages and currents, and a driving method which uses trapezoidal-wave voltages and currents. First, how to drive using five-phase trapezoidal-wave voltages and currents will now be described.
- the motor shown in Fig.1 is an AC motor, in which current values in each of the phases of the motor becomes positive and negative values alternatively in sequence, thereby providing a timing at which the current value is zero.
- a rectangular-wave current for the driving has a current amplitude of Imax
- the current will change from its value +Imax to -Imax at a moment, so that it will not be impossible to control the current at a high speed which makes it negligible a time duration down to a current zero.
- the motor will have drawbacks such as ripples in the torque, vibration, noise, and/or power loss.
- trapezoidal-wave currents each having a current amplitude Imax.
- trapezoidal-wave currents Ia, Ib, Ic, Id and Ie have current waveforms Iak, Ibk, Ick, Idk and Iek, respectively.
- the abscissa axis represents electrical angle of the rotation angle ⁇ r of the rotor.
- phase windings located in an upper half side of the stator are aligned in the order of SA, SD/, SB, SE/ and SC in the circumferential direction, whereby current passing those windings are in the order of Ia, -Id, Ib, -Ie, and Ic.
- a rotor current Ir
- the currents of the respective phase windings belonging to the upper half side of the stator in the drawing are all positive currents.
- the formula (3) shows a sum of such positive currents.
- phase windings located in a lower half side of the stator are aligned in the order of SA/, SD, SB/, SE and SC/ in the circumferential direction, whereby current passing those windings are in the order of -Ia, Id, -Ib, Ie, and -Ic, which are all negative currents which pass the phase windings located in the lower half side of the stator in the drawing.
- the rotor 12 can be rotated freely in its circumferential directions.
- the rotor rotation position ⁇ r in Fig. 1 is 0 degrees.
- the windings of the stator and the windings of rotor are directly opposed to each other via an airgap. Currents supplied to the rotor windings are opposite in their directions to currents supplied to the stator windings which are opposed to the rotor windings.
- a rotor current -0.5xIr is supplied, while to the rotor winding R1/, a rotor current 0.5xIr is suppled, which means that those currents take a round.
- a rotor current -Ir is supplied, while to the rotor winding R2/, a rotor current Ir is suppled, which means that those currents also take a round.
- a rotor current -Ir is supplied, while to the rotor winding R3/, a rotor current Ir is suppled, which means that those currents also take a round.
- a rotor current -Ir is supplied, while to the rotor winding R4/, a rotor current Ir is suppled, which means that those currents also take a round.
- a rotor current -0.5xIr is supplied, while to the rotor winding R5/, a rotor current 0.5xIr is suppled, which means that those currents also take a round.
- windings R1, R1/, R5 and R5/ are given an amount of "currents x number of winding turns" which is half of such an amount given to the other windings. For this reason, the number of turns of each of these windings can be reduced down to 1/2, and the same amounts of currents as those to the other windings can be supplied. In this case, such rotor windings can be connected in series to have the same amount of current flowed therethrough. In addition, since the degree of freedom of winding connections is higher, the windings to which the same amount of current, so that the connections of the windings can be changed with each other. In addition, an easier method of turning the windings or a method of reducing amounts of windings at coil end portions can be employed.
- the stator has 10 slots and the rotor has also 10 slots.
- the stator slots and windings wound in the respective stator slots are directly opposed to the rotor slots and windings wound in the respective stator slots via the airgap provided between the stator and rotor.
- the stator windings and the rotor windings which are directly opposed to each other, are subjected to receiving currents whose amplitudes are equal to each other but whose directions are opposite to each other.
- the stator winding SB receives a curren Ib flowing throgh a diretion from the front to the rear of the drawing paper
- an integral of stregnth H of a magntic field around a path of a magnetic flux shown in a two-dot chain line becomes zero accroding to Ampere's law, because the currens passing through the windings providing this path are cancled out to be zero. That is, the magentic flux 13 has a component of zero.
- stator current phase ⁇ i 0 degrees.
- a clockwise direction CW thereof is fined as a positive direction and expressed by an electrical angle.
- circumferential electrical angle positions in the counterclockwise rotation direction are provided as 0 degrees at the A-phase winding, 72 degrees at the B-phase winding, 144 degrees at the C-phase winding, 216 degrees at the D-phase winding, and 288 degrees at the E-phase winding.
- FIG. 2 A state shown in Fig. 2 will now described in which a current phase ⁇ i is 36 degrees and the stator current is moved 36 degrees relatively in the clockwise rotation direction CW.
- the current Ia of the A-phase winding SA changes from the previous 05xIr to Ir
- the current Ic of the C-phase winding SC changes from the previous 05xIr to -IrxIr
- the current Ie of the E-phase winding SE changes from the previous -Ir to -05xIr, respectively, but the B-phase and D-phase currents Ib and Id are not changed.
- the rotor rotation position ⁇ r shown in Fig. 2 is the same as that shown in Fig.
- respective directions radially viewing from the center of the motor which can be shown for example in Fig. 1 , are defined as a motor angle ⁇ z, as shown in Fig. 2 .
- currents passing through the winding SC/ and R1/ shown in Fig. 2 are both 0.5xIr, so that a sum 1.0 ⁇ Ir of both currents contributes magnetic excitation.
- currents through the winding SA and R1 are Ir and-0.5xIr, respectively, so that a sum of 0.5xIr of both currents contributes to the magnetic excitation.
- currents through the winding SC and R5 are both-0.5xIr, whereby a sum -Ir of both currents contributes to generating the field magnetic fluxes for the excitation.
- currents through the winding SE/ and R4 are 0.5xIr and -Ir, respectively, a sum of -0.5xIr of both currents contributes to generating the field magnetic fluxes for the excitation.
- currents through the winding SA/ and R5/ are -Ir and 0.5xIr, respectively, a sum of -0.5xIr of both currents contributes to generating the field magnetic fluxes for the excitation. Accordingly, a sum IFN of the field currents passing through those six windings is shown as -2xIr.
- the currents 2xIr and -2xIr which pass through 12 and two-grouped windigns contribute field current components for producing magentic fluxes icnluding fluxes shown by two-dot chain lines 21, 22 23.
- the sate shown in Fig. 2 indicates a magentic-flux direction at which the motor ange ⁇ z is 72 degreees.
- the respetive stater currents adn the respective rotor currents are cancleled out due to passing in the mutually opposed directions, characterized by the field current compoent is zero as a total.
- field current comonents 4xIr and -4xIr are generated. In this way, in the configuration of the present embodimetn, the field current components are generated depending on the current phase ⁇ i.
- stator currents ITS and the rotor currents ITR still have interactions with the field magnetic fluxes so as to generate torque.
- Such currents can be regarded as torque current components.
- the field magnetic fluxes interact with the rotor currents ITR to generate electromagnetic interactions therebetween, thus providing torque to the rotor.
- the field magnetic fluxes interact with the stator currents ITS to generate electromagnetic interactions therebetween, thus providing the rotor with torque in the opposite direction. That is, owing to the interactions with the field magnetic fluxes, there is provided a relationship between actions and reactions, which makes it possible to generate the torque.
- the action/reaction relationship provides a basic configuration to generate the torque without causing the armature reactions.
- the field magnetic fluxes can be increased or decreased.
- the current components of both stator currents and rotor currents excite the field magnetic fluxes.
- many of the conventional motors have field current components in either the stator or the rotor.
- the foregoing excitation structure of the present embodiment is one of the features of the present invention.
- the motor shown in Figs. 1 and 2 provides magnetic resistance values which are mutually equal to each other in any of the directions defined by the respective motor angles ⁇ z, and provides the rotor having no salient pole structure. These points are also one of the features of the motor according to the present invention.
- such methods include a method of providing the stator with field excitation current components, a method of providing the stator with permanent magnets, a variable-magnet method of varying the strength of the permanent magnets using currents for magnetization and demagnetization, a method of providing slits, a method of arranging the slits and permanent magnets closely to each other, and a method of providing the rotor with a shape having a salient-pole structure. These methods can also be used in a combination thereof.
- a current passing each slot is defined as a product, ampere-turn, [A•Turn] between the current value of each winding and the number of turns of the windings in each slot.
- a winding current 5[A] and 20 turns of windings in a slot is equal in the product [A•Turn] as a case where a winding current 10[A] and 10 turns of windings in a slot.
- reducing a slot current done to half thereof means a reduction in the current value or the number of turns.
- a winding voltage can be selected.
- the field current component and the torque current component can be superposed on the windings in each slot, as exemplified by the windings SA, SA/, R2/ and R4 shown in Fig. 2 .
- FIG. 3 shows a development view in which the sylindirical motor of in Fig. 2 is developed linearly.
- a rotor rotation position ⁇ r is 0 degrees and a current phase ⁇ i is 36 degrees.
- Slots shown in Fig. 2 are omitted from being drawn. Wave-shaped broken lines mean that both outsides of the range are omitted from being drawn.
- the windings are given the same refernce numbers as those shown in Fig. 2 .
- a reference number 31 shows a motor
- a refernce number 32 shows a rotor
- an airgap is formed therebetween.
- the range of the motor angles ⁇ z 0 degrees to 360 degrees corerespods to the configuration shown Fig. 2 .
- Windings circled by broken lines 37, 38, 39 and 3A include field excitation current compoents, as described in Fig. 2 .
- Such field excitation current compoents excite the field magentic fluxes 21, 22, 23, 33, 34, 35 and 36, and other fluxes.
- Currents passing through the other windings are current components for generatingng torque, not contibuting to the field excitation.
- Torque Tacting to the right side in the drwwigns is applied to torque current comoetns of the stator 31, while torque T acting to the left side in the drawing is applied to toruqe cvurrent compoentns of the rotor 32. Both of the toruqe T acts in the mutually opposite directions via the field magenetic fluxes.
- Fig. 4 is an example showing a configuration in which the current phase ⁇ i of Fig. 3 is increased from 36 degrees to 72 degrees.
- Broken lines 41, 42, 43 and 44 encircles windings of which currents include field excitation current components. These current components are increased two times larger than those shown in Fig. 3 .
- reference numbers 41, 42, 43, 44, 45, 46 and 47 show field magnetic fluxes.
- the field current components are increased by increasing the current phase ⁇ i to 72 degrees.
- the current phase ⁇ i may be made larger so as to raise a ratio of the field magnetic flux current components. Such a method will raise the torque, which improves an efficiency of power of the motor.
- the current phase ⁇ i and the rotor rotation position ⁇ r are equal to the integral multiple of 36 degrees, dawning and explaining changes of such current phase and the rotor rotation position are easier.
- the slots of both stator and rotor are arranged at a pitch of 36 degrees, which is larger in the sense of discreteness. Hence, larger ripples in the torque may occur. Additionally, linearity between the current phase ⁇ i and the field magnetic flux amplitudes may be degraded.
- One solution to this discreteness issue is to increase the number of phases.
- Figs. 1 and 2 exemplify the five-phase stator, three- and four-phase stators can be available and the number of phases can be increased up to higher phases, such as six, seven, nine and eleven phases.
- the number of rotor slots may be set to be different from the number of stator slots. This is also able to reduce the discreteness due to an averaging effect.
- the stator windings are would in the full-pitch and concentrated winding manner, but may be wound in a distributed winding manner, thereby lowering the discreteness.
- a short-pitch winding method may be applied to the distributed windings, thereby further decreasing the discreteness.
- IWSP and IWRN denote current components which are approximately opposed to each other via the airgap and are opposite to each other in their passing directions.
- the formula (9) is suitable.
- the sum IWSP is 3xIr provided by the stator windings SA, SD/, SB and SE/.
- the sum -IWRN is -3xIr provided by the rotor windings R1, R2, R3 and R4.
- the stator current is defined as a sum of a torque current component and a field current component.
- the stator toque current components IWSP have the same value of the rotor torque current components IWRN which are approximately opposed to the stator toque current components IWSP via the airgap but are opposite to each other in their directions. Accordingly, a sum "IWSP-IWRN" of both torque current components can be regarded as a generic term of the current components which will not generate a magnetomotive force in other parts of the mother and will not affect magnetically the field magnetic fluxes.
- currents other than the torque current components can be provided as field current components, and contribute to the amplitudes and distributions of the field magnetic fluxes.
- the field current components generate torque depending on a particular distribution of the field magnetic fluxes, and it is noted that the torque current components and the field current components are not strictly separated from each other.
- the currents provided by the torque current components IWSP and IWRN and field current components can also be defined by using current phase ⁇ i and current amplitude Ims. Such a definition can be employed when the stator current amplitude Ims and the rotor current amplitude Imr are qual to each other.
- the field current components can be said such that the stator-side field current components Ifs and the rotor-side field current components Ifr are not always the same value.
- This differential field current component Ifr can be treated by another control manner, whereby the motor currents can be expressed based on the current amplitude Ims and the current phase ⁇ i. From the values of the current phase ⁇ i, a ratio between approximate field current components and torque current components can be recognized for the control. As will be described later with Fig. 9 and its explanations, a characteristic diagram showing the current phase ⁇ i and the torque T can be produced.
- controlling the magnitudes of the field magnetic fluxes controlling the current phase ⁇ i has been explained. Instead of this, the amplitude of the current can be controlled. Since the motor voltage is proportional to a product of the magnitudes of the field magnetic fluxes and the number of rotations, it is necessary to control the field magnetic fluxes depending on drive conditions of the motor. Particularly, in a high-speed rotation range, the field should be weakened so that the field magnetic fluxes should be smaller in a controlled manner. Weakening the field will be explained later.
- Fig. 5 exemplifies various motor sections, which are provided by rotation of the motor shown in Fig. 2 .
- This example is provided at a current phase ⁇ i of 36 degrees.
- Fig. 2 shows that a rotor rotation position ⁇ r is 0 degrees and the direction of field magnetic fluxes is shown by a magnetic flux 22.
- the rotor rotation position ⁇ r is 18 degrees and the direction of the field magnetic fluxes is shown by a two-dot chain line 51.
- the rotor rotation position ⁇ r is 36 degrees and the direction of the field magnetic fluxes is shown by a two-dot chain line 52.
- the rotor rotation position ⁇ r is 54 degrees and the direction of the field magnetic fluxes is shown by a two-dot chain line 53. Furthermore, in a part (d) of Fig. 5 , the rotor rotation position ⁇ r is 72 degrees and the direction of the field magnetic fluxes is shown by a two-dot chain line 54. In these rotation positions, the amount of the rotor current Ir is constant, while the windings of the rotor are subjected to passing of constant currents when the rotor rotates.
- the phase currents of the stator are controlled based on the foregoing formulae (4) to (8) such that the stator currents can maintain the relative same relationship with the respective currents of the rotor, that is, the current phase ⁇ i of 36 degrees can be maintained.
- Fig. 6 shows the respective phase-current waveforms obtained at the current phase ⁇ i of 0 degrees
- the phase is delayed by 36 degrees to reach the current phase ⁇ i of 36 degrees.
- the respective current waveforms are moved by 36 degrees to the right side on the drawing of Fig. 6 , thus providing the respective current waveforms which are obtained at the rotor rotation positions in Fig. 5 .
- Fig. 7 exemplifies a configuration which supplies a rotor current Ir by using a rotary transformer, in which this configuration also outlines longitudinal sections of the motor shown in Figs. 1, 2 and other drawings.
- a reference number 71 shows a stator
- a refence number 72 shows a rotor
- a reference number 73 shows coil end portions of stator windings
- a reference number 74 shows coil end portions of rotor windings
- a reference number 75 shows a rotor shaft.
- a reference number 76 shows a rotary transformer which transmits power necessary to supply the rotor current Ir, from a driver to the windings 74 of the rotor 72.
- a reference number 7A shows a stator of the rotary transformer
- a reference number 7B shows a rotor of the rotary transformer.
- the rotary transformer is shaped by converting the section shown in Fig. 7 into a cylindrical form.
- a reference number 78 shows a stator-side winding provided in a circular form in the rotary transformer.
- a reference number 79 shows a rotor-side winding provided in a circular form in the rotary transformer.
- a magnetic flux is generated in a direction shown by a two-dot chain line 7K.
- a reference number 7H shows a rectifying circuit and a reference number 7G shows connecting lines from the rotor-side winding of the rotary transformer. The output of the rectifying circuit 7H is connected to the rotor winding 74 via connecting liens 7J, so that the rotary current Ir is supplied.
- the rotary trasnformer 76 is drawn by being exaggerated in its size and structure.
- power supplied to the rotor is mainly consumed as resistive lossof of the rotor winding, and is smalelr compared with a motor output.
- the rotary transformer 76 is driven by a highfrequency AC voltage of a frequency of 100 kHz or more, the rotary trasnfomer can be provided with a smaller-size core, windings with lesser turns, and a more compact size, such as a trasnformer installed in a swithcing regulatior power supply.
- the rotary transformer 76 and the rectifying circuit 7H can be arraned in such a space.
- the rotor 72 of the motor and the the rotor 7B of the rotary transformer can be unitied if the radially outer portion of the stator 7A and the radially inner poriton of the rotor 7B are swithched to each other. This is advangageous in protecting the rotor-side winding 79 of the rotary trasnformer from being subjected to the centerigural force.
- magnetic members used by the rotary dterasnformer is formed of materials such as amorphous, silicon, or thin iron core, to avoide the iron loss from being too excessive. This is also advantegeous in producing a compact rotary trasnformer.
- the rotary trasnformer 76 is magtically excited in the rotor shaft direction, so that non-magentic memgers can be used partly, thus being an effective countermeasure.
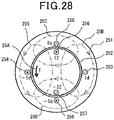
- a part (A) of Fig. 24 exemplifies a rotary transformer 241 which is one of solutions to a magnetomotive force generated in the rotor shaft direction in the rotary transformer 76 shown in Fig. 7 .
- a reference number 242 shows a stator of the rotary transformed
- a reference number 243 shows a rotor of the rotary transformer.
- This rotary transformer 76 has a cylindrical shape produced based on the section of the part (A) of Fig. 24 .
- Reference numbers 244 and 245 shows stator-side windings of the rotary transformer, and these windings are connected in series but oppositely to each other and each are shaped into a circular.
- reference numbers 246 and 247 show rotor-side windings of the rotary transformer, and also connected in series but oppositely to each other.
- An output line 248 is electrically connected to the rectifying circuit 7H of Fig. 7 .
- the rotor-side windings 246 and 247 each are shaped into a circular form.
- magnetic fluxes 24G and 24H are generated in directions 7K shown by two-dot chain line.
- Employing the configuration shown in the part (a) of Fig. 24 makes it possible to cancel out axial magnetomotive forces generated along the rotor shaft 75, thus being no magnetomotive force generated and no adhesion of iron powder from the surroundings.
- a part (b) of Fig. 24 exemplifies a generator 249 which can be used in place of the rotary transformer 76 of Fig. 7 .
- a refence number 24A shows a stator and a refence number 24C shows three-phase windings having input lines 24D to which three-phase voltages and currents are supplied.
- a reference number 24B shows a rotor and a reference number 24E shows three-phase windings having output lines 24F electrically connected to the rectifying circuit 7H shown in Fig. 7 .
- the rectifying circuit 7H is provided as a three-phase full-wave rectifying circuit.
- Fig. 8 exemplifies a driver which supplied currents and voltages to the windings of the a motor according to the present invention, in which the motor are shown in figures including Figs. 1 and 2 .
- a reference number 81 shows a DC power supply and a reference number 87 shows an A-phase winding which corresponds to the windings SA and SA/ shown in Fig. 1 .
- a reference number 88 shows a current detecting means to detect the A-phase current Ia shown in Fig. 1 .
- Reference numbers 82, 83, 84 and 85 each show a power converting element such as a transistor, which applies PWN control to the current of the A-phase winding 87 for the drive thereof, of which controlled current is a positive or negative value.
- a reference number 86 indicates four transistors, and reference numbers 89, 8C, 8F, 8J, and 8M are power driving units having the same function as that of the four transistors 86.
- a reference number 8A shows a B-phase winding which corresponds to the windings SB and SB/ shown in Fig. 1 .
- a reference number 8B shows a current detecting means to detect the B-phase current Ib shown in Fig. 1 .
- a reference number 8D shows a C-phase winding which corresponds to the windings SC and SC/ shown in Fig. 1 .
- a reference number 8E shows a current detecting means to detect the C-phase current Ic shown in Fig. 1 .
- a reference number 8G shows a D-phase winding which corresponds to the windings SD and SD/ shown in Fig. 1 .
- a reference number 8H shows a current detecting means to detect the D-phase current Id shown in Fig. 1 .
- a reference number 8K shows an E-phase winding which corresponds to the windings SE and SE/ shown in Fig. 1 .
- a reference number 8L shows a current detecting means to detect the E-phase current Ie shown in Fig. 1 .
- the power converting elements a semiconductor which uses MOSFET, IGBT, GaN, or SiC, or an integrated element or module can be adopted.
- a reference number 811 shows a control device which is charge of controlling the driving circuits, in detail, controlling positions, a rotation speed, torque, currents and other factors of the motor.
- a reference number shows a control command signal which includes a motor position command.
- a reference number 813 shows a position detecting means of the rotor, and an output 814 of the position detecting means 813 is expressed by a rotor rotation angle ⁇ r.
- the motor position control is carried out such that the rotor rotation angle ⁇ r is feed-back controlled to the position command, with which a difference is calculated to obtain a speed command.
- the motor speed control is carried out such that a temporal differential value of the rotor rotation angle ⁇ r is feed-back controlled to the speed command, with which a difference is calculated to obtain a torque command 95.
- a reference number 97 indicates a current command generating means which operates based on a torque command 95 and motor spec information 96 in order to obtain a current amplitude Imax, which is numbered 99, a current phase ⁇ i and other necessary information. That is, a process is performed by the generating means to provide proper values to motor torque, a motor voltage, and a motor current.
- the motor spec information 96 includes a rotor rotation angle ⁇ r, a rotor rotation speed, and motor-inherent information shown in Figs. 9 and 10 .
- a reference number 9A indicates an adder provided to obtain current phase information (- ⁇ i+ ⁇ r).
- a reference number 9C indicates a current control means, which is provided to input the current amplitude Imax, the current phase information (- ⁇ i+ ⁇ r), and outputs 88, 8B, 8E, 8H and 8L of the current detecting means in order to perform feed-back control on the respective phase currents.
- This performance enables the phase currents to have control angels as shown by the formulae (4) to (8).
- a driving putout 9D is thus outputted to have the transistors of each of the power driving units 86, 89, 8C, 8F, 8J and 8M turned on or off selectively for the PWM control.
- the control device 811 can control the rotation of the motor.
- a reference number 8M indicates a power driving unit structured similarly to the foregoing power driving units 86 and operates in response to a drive output 81B for control.
- a reference number 8N encircled by a dashed line indicates the rotary transformer 76 shown in Fig. 7 , in which a stator-side winding 8P corresponding to the stator-side winding 78 shown in Fig. 7 and a rotor-side winding 8Q corresponding to the rotor-side winding 79 shown in Fig. 7 .
- the control device 811 Based on a current value 8R detected by the current detecting means which detects a current passing through the stator-side winding 8P, the control device 811 calculates a rotor current Ir for estimating thereof.
- a circuit 8S corresponds to the rectifying circuit 7H shown in Fig. 7 , and in this circuit, the output of the rotary transformer 76 is rectified to generate a rotor current Ir passing therethrough.
- Reference numbers 8T, 8U, 8V, 8W and 8X show the mutually serially-connected rotor windings, which correspond to the rotor windings R1 and R1/, R2 and R2/, R3 and R3/, R4 and R4/, and R5 and R5/, respectively.
- the control device 811 has the configuration as described and drive not only the currents Ia, Ib, Ic, Id and Ie of the respective phases of the stator but also the rotor current Ir, thereby controlling the rotation positions, rotation speeds, toque amounts, and other necessary factors of the motor.
- Fig. 9 shows a quantitative relationship between the current phase ⁇ i and torque T of the motor shown in Figs. 1 and 2 .
- Fig. 9 has an abscissa axis indicating the current phase ⁇ i ranging from 0 degrees to 360 degrees and an ordinate axis indicating the torque amounts.
- the torque 91 changes as shown in a characteristic curve, by way of example.
- the motor of Fig. 1 is energized, so that magnetomotive forces resulting from the stator currents and the rotor curates are canceled out with each other, thus generating no field magnetic fluxes.
- the torque T is zero.
- An operating point 92 the field current component has been increased, but a magnetic saturation characteristic in magnetic steel sheets appears gradually.
- a ratio between the rotor current Ir and the current amplitude Imax of each of the phases of the stator can be kept at the same value but can be changed their amplitudes.
- the torque characteristic curve 91 moves up or down in Fig. 9 in similar figure curves.
- the torque characteristic curve changes into various figures, so that the such characteristic curves are also be usable.
- Fig. 10 shows a quantiative comaprison the convetional mtor and the moror accordng to the present invetion, in respect of a relationship between the motor curretn I and the torque T.
- Fig. 10 has an abscissa axis indicating a motor current obtained by giving 1 to a constant rating current, so that, for example, a number "4" in the abscissa axis shows four times larger than the constant rating current.
- the ordinate axis shows amounts of torque T.
- Fig. 10 shows a characteristic 101 exemplifying a conventional interior permanent magnet synchronous motor (IPSM) or similar motors.
- the toque T linearly increases in proportion to current supplied within a range up to a torque amount of approx. three times larger than a constant rating torque, but the torque amount of the three times or more is not guaranteed. It is thus frequent that the torque of such conventional motors is saturated at an amount which is five times largen than a constant raring torque.
- magnetic members such as magnetic steel sheets will saturate magnetically so that operating points of permanent magnets will change, resulting in that the power factor decreases and copper loss increases. This will reduce power efficiency of the motor.
- both the rotor current Ir and the current amplitude Imax of each phase of the stator are changed.
- a maximum torque point such as the operating point 92 in Fig. 9 , is obtained to have a relationship between the motor current I and the torque T as shown by the torque characteristic 102 in Fig. 10 .
- the obtained characteristic is not so much different from that of the conventional motors, rather being disadvantageous in some degree due to needing supply of the rotor current.
- large values of the torque can be generated in Fig. 10 .
- the torque in such larger current range can increase at a rate of 1.3-th power or more, thereby being able to torque amounts larger than that obtained by a linear increase.
- the stator currents and the rotor currents are opposed to each other via the airgap and the positive and negative currents enable the magnetomotive forces to be canceled out with each other, thus no causing magnetomotive forces around the currents.
- the field current components generate field magnetic fluxes
- the torque current components generate torque but does not generate the armature reaction. Hence, there are no affection on the field magnetic fluxes from the torque current components.
- the formula (12) represents a force in the circumferential direction, which acts in the airgap of the motor.
- FEN BR ⁇ BEN / ⁇
- FEN denotes a force exerted in the circumferential direction
- BR denotes a magnetic flux component along the radial direction in the airgap
- BEN denotes a magnetic flux component along the circumferential direction in the airgap
- ⁇ denotes a permeability in vacuum.
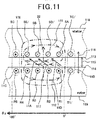
- Fig. 11 is a linearly developed view, in which the upper part shows the stator and lower part shows the rotor in the drawing.
- a reference number 113 shows an airgap surface of the stator
- a reference number 114 shows an airgap surface of the rotor
- an airgap 115 is provided between both surfaces 113 and 114.
- the outside of wave-shaped dashed lines 118 in the stator and the outside of wave-shaped dashed lines 119 are omitted from being drawn. Further, the airgap 115 is exaggerated for the sake of an easier explanation.
- the slot shapes shown in Fig. 2 are also omitted.
- Fig. 2 when the rectangular-wave currents allows a positive current Ir to pass from the front to the rear in the drawing, as indicated by a mark of a circle combined with an x-symbol, whilst, when the rectangular-wave currents allows a negative current Ir to pass from the rear to the front, as indicated by a mark of a circle combined with a dot.
- the positive current Ir is supplied to the windings TC/, T1/, SA, SD/, SB, and SE/ of Fig. 11 .
- the negative current Ir is supplied to the windings R1, R2, R3, R4, R5 and SC.
- FIG. 25 An example of the rectangular-waveform currents applied in Fig. 11 is shown in Fig. 25 .
- the current phase ⁇ i is 36 degrees
- the rotor rotation positions ⁇ r are assigned to the abscissa axis
- currents are assigned to the ordinate axis.
- a chart (a) of Fig. 25 shows an A-phase field current component Iaf
- a chart (f) thereof shows an A-phase torque current component Iat
- B-, C-, D- and E-phases shows a rotor current Ir.
- the respective phase current waveforms can be adjusted depending on motor characteristics, including reducing torque ripples, for an improved performance of the motor.
- the waveform can be changed approximately to smoother rise and fall waveforms, or smoother sinusoidal waveforms.
- the positive current Ir passing through the stator winding SA and the negative current -Ir passing through the rotor winding R1 are close to each other. For this reason, a total magnetomotive force from these two windings are canceled out, thus being 0.
- the magnetomotive force of the two windings does not affect the surrounding.
- the same theory can be applied to the mutually opposed windings SD/ and R2, SB and R3, SE/ and R4, whereby a magnetomotive force from these paired windings to the surrounding is zero.
- the eight currents are located such that the mutually opposed currents via the airgap offset their magnetomotive forces, so that there is caused no magnetomotive force outside the eight currents (windings), thus causing no armature reaction.
- a circuital integration value of a magnetic field strength H vector along a path 11E indicated by a two-dot chain line becomes zero according to Ampere's law, because a sum of currents passing through an inside of the path 11E. Hence, magnetic fluxes generated along the path 11E become zero. However, within an inside encircled by the path 11E, magnetomotive forces are partially generated. For example, there is a path 111 indicated by a two-dot chain line. A circuital integration value of a magnetic field strength H vector along the path 111 becomes a sum "4xIr" of currents passing the stator windings SA, SD/, SB and SE/ located within the path 111, according to Ampere's law.
- a circuital integration value of a magnetic field strength H vector along the path 112 becomes a sum -"4xIr" of currents passing the stator windings R1, R2, R3 and R4 located within the path 111, according to Ampere's law. Since the rectangular-wave current drive is for non-liner drive, it is effective if an algorism is employed with which current excess and deficiency caused due to the rotor rotation is compensated by all the currents of the motor.
- the magnetic fluxes 111 and 112 produce circumferential magnetic flux components MFG in both the airgap 115 and its surrounding.
- a radial magnetic flux component 22 in both the airgap 115 and its surrounding and the circumferential magnetic flux components MFG are combined with each other, and the combined magnetic fluxes 117, 11A and 11D can be depicted as shown in Fig. 11 .
- the combined magnetic fluxes are depicted only in the airgap 115.
- a magnetic flux density of such combined magnetic fluxes is divided into a radial magnetic flux density component and a circumferential magnetic flux density component, and these components are applied to the formula (12), so that a circumferential force exerted in the stator and the rotor can be calculated. Moreover, by multiplying the calculated value by the radius of the rotor, an amount of torque can be calculated.
- the radial length of the back yoke is tens of times larger, compared with the airgap length of 0.5 mm.
- the circumfential magenetic flux density compoent of the magnetic flux 111 in the back yoke is smaller, so that magnetic resistace at this portion is also lower.
- the cirmcumferential magenetic flux density compoenent of the magennec flux 112 is also smaller, thereby providng a lower magenetic resisntace to this magnetic flux 112, due to that fact that the back yoke of the rotor is wider.
- These magnetic fluxes 111 and 112 thus do not affect much the radial magenetic flux components 22 in the back yoke members in terms of the magnetic flux densities.
- the motor according to the present invention has an advantage that both the currents passing through the stator windings SA, SD/, SB and SE/ and the currents passing through the rotor windings R1, R2, R3 and R4 confine the circumferential magnetic flux component MFG in the thin airgap and its near surrounding.
- the back-yoke members have smaller magnetic resistance values, thereby being less consuming of the magnetomotive force.
- the foregoing eight currents can raise, up to a higher level, a magnetic flux density component BEN of the circumferential magnetic flux component MFG in the airgap.
- Passing of the radial magnetic flux component 22 through the airgap 115 is relatively easier to the fluxes even when the circumferential magnetic flux density component of the airgap is very large, because the distance of the airgap is smaller, such as 0.5 mm.
- the radial magnetic flux component 22 i.e, a field magnetic flux component
- the radial magnetic flux density BR can be raised.
- the field magnetic flux component can be generated relatively easily by adopting, for example, permanent magnets which can be arranged in the rotor, rotor- and stator-arranged field windings dedicated to the field magnetic flux, or other means.
- the motor according to the present invention can provide characteristics showing a higher torque density and a higher output density.
- the circumferential magnetic flux density component BEN of the circumferential magnetic flux component MFG can produce locally a higher magnetic flux density, such as 4 or 6 tesla, which is over 2 tesla corresponding to a saturated magnetic flux density of normal magnetic steel sheets, by supply of larger torque current components.
- the value of a magnetic flux density in portions close to the airgap in Fig. 11 is largely concerned with generation of the torque. Other portions such as back yoke portions do not contribute to generating the torque, which is rather favorable to a motor design.
- a motor can be produced whose torque generating portion generates a substantially 6 tesla of magnetic fluxes, by using a magnetic material whose saturated magnetic flux density is 2 tesla.
- a magnetic flux density of the radial magnetic flux component 22 which is a part of the field magnetic flux component.
- the field excitation current components can be made very larger, so that the magnetic flux density of 2 or more tesla can be generated.
- a specific permeability comes closer to 1, but there are no limitations to the configuration and theory.
- the torque is proportional to the radial magnetic flux density component BR at the portions close to the airgap, which means that this component BR is an important factor in generating the torque.
- the circumferential force according to the formula (12), which is derived from Maxwell stress formula, is expressed as a magnetic flux density at an operating point. Accordingly, this formula manner is able to express a force generated in a higher magnetic flux density range of a magnetic member used by a motor.
- a higher magnetic flux density range is a range in which the specific permeability comes close to 1, or a range higher than a magnetic saturation upper limit.
- the motor according to the present invention provides advantages of reducing bias in the field magnetic fluxes due to the armature reaction as well as realizing higher torque by raising the magnetic flux density in the airgap more than a saturated magnetic flux density and weakening the field during a higher rotation range by arbitrary controlling the radial magnetic flux density component. It is considered that Fig. 11 shows an electromagnetic basic configuration which can generate a larger amount of force.
- a rotor N-pole and its neighborhood regions has been shown in a range of motor angles ⁇ z from 0 to 180 degrees.
- the directions of currents and magnetic fluxes should be shown oppositely to those shown in Fig. 11 .
- the directions and amounts of the force and torque are the same direction as those shown in Fig. 11 .
- the width of the airgap 115 can be smaller at 0.5 mm or thereabouts, but a radial length 116 ranging from the radially inner position of the rotor windings to the radially outer position of the stator windings is, as can be understood from the slot shapes in Fig. 1 , for example 50 mm, which is 100 times larger than 0. 5 mm width of the airgap, though being just an example.
- the airgap 115 is drawn in an exaggerated manner about its size.
- the radial magnetic flux component 22 has another difficulty such that magnetic resistance against the radial magnetic flux component becomes sharply large when its average magnetic flux density exceeds an average magnetic flux density which can be defined as approximately half of 2 tesla, although the magnetic resistance is kept smaller in a rage in which the average magnetic flux density is below the average magnetic flux density.
- an average magnetic flux density which can be defined as approximately half of 2 tesla, although the magnetic resistance is kept smaller in a rage in which the average magnetic flux density is below the average magnetic flux density.
- the steel sheets normally used by the conventional motors have a saturated magnetic flux density of 2 tesla.
- Fig. 12 shows a lateral section of a core-less motor from which stator tooth and rotor tooth are removed.
- This motor can be provided by modifying the motor shown in Fig. 1 and other drawings.
- a reference number 121 shows the back yoke of a stator
- a reference number 122 shows stator windings
- a reference number 123 shows the back yoke of a rotor
- a reference number 124 shows rotor windings.
- the stator windings are composed of multiple-phase windings each of which is a round wire or a rectangular wire. Each wire is folded and formed and fixed using a high heat-resistant resin materials or other materials.
- a reference number 125 indicates a radial length covering the windings of both stator and rotor.
- this radial length 125 can be shortened to 1/2 or thereabouts of a radial length 116 of the windings in Fig. 11 , as the windings can be arranged in the motor teeth in Fig. 1 and other drawings.
- the radial direction 125 can be shortened more.
- the core-less structure motor shown in Fig. 12 can be energized by larger amounts of current to output larger torque, in addition to realizing a compact structure, weight saving, lesser vibration, lesser noise, and other features.
- a relatively smaller current is used to obtain lower torque output, the load to magnetically excite the field is relatively increased, so that the motor efficiency is lowered.
- Fig. 13 shows a motor provided with an intermediate structure between the motor shown in Fig. 1 and the motor shown in Fig. 12 .
- a partial structure of a stator shown in Fig. 13 is made by modifying the motor of Fig. 1 into a four-pole structure and modifying a stator shape of Fig. 16 .
- a slot shape 137, shown by a broken line, corresponds to the slot shape of Fig. 15 .
- a reference number 134 shows a stator tooth and a reference number 135 shows a slot. Circumferential outsides of wave-formed broken lines are committed from being drawn.
- a reference number 131 indicates a width of each tooth 134 of the stator
- a reference number 132 indicates a circumrenal width of each slot 135 at a radially inward position of the stator.
- the tooth width 131 and the slot width 132 are almost equal to each other, but in this modification, the tooth width 131 is reduced largely.
- each slot 135 is able to have an increased sectional area, whereby a radial length 133 of each slot can be shortened. From an electromagnetic viewpoint, this motor can resemble the motor of Fig. 2 in the slots and winding structures.
- the stator teeth 134 can serve as aligning the stator windings and firmly fixing the stator windings.
- the windings can be manicured more easily and the fixing strength to the weddings can be raised, when being compared with the motor of Fig. 12 .
- a reference number 136 indicates, by way of example, a cooling pipe, which is installed in the slot, closely to the back yoke, or on a part of the tooth 134.
- Such cooling pipes can be fixed with the tooth 134.
- this stator and rotor can be combined with, with modifications if needed, the configuration shown in Fig. 1 , 12, 13 , or other structures. Particularly, when larger current is required to energize the windings or when faster rotation is required, securing a high cooling performance should be secured by various types of cooling means.
- the field magnetic fluxes can be controlled.
- currents other than the field current components can be supplied such that magnetomotive forces caused by the stator-side currents and those caused by the rotor-side currents can be canceled out each other, thereby preventing the armature reaction from occurring or reducing the degree of the armature reaction.
- the field current components can be increased or decreased, so that the field can be strengthened or weakened in a controlled manner.
- An operating point belonging to a region A in the characteristic of the speed V and the torque V shown in Fig. 27 , provides a maximum of the field current components and a maximum of the torque current components in Fig. 2 or other figures.
- such an operating point correspond to the operating point 92 in the qualitative characteristic between the current phase ⁇ i and torque T in Fig. 9 .
- the field current components are weakened, for example, in the case of Fig. 2 , so that the torque current components are larger.
- This opening point can be indicated, for instance, as an operating point 93 in the current phase ⁇ i and torque T in Fig. 9 .
- the motor When the field magnetic fluxes are small, the motor has a smaller induced voltage constant, whereby the motor can be driven at a high rotation speed.
- the field weekend control is performed to keep the motor voltage at a constant value from the base rotation speed to a high rotation speed of the motor, in parallel with maintaining the torque current components.
- this parallel control allows a product of the motor voltage and the motor current to be constant, thus achieving, namely, constant output control.
- Fig. 14 exemplifies a driving circuit in which the motor windings are star-connected with each other, in stead of the connection form of Fig. 8 .
- an A-phase current Ia is supplied to a A-phase winding 141; via transistors 149 and 14A, a B-phase current Ib is supplied to a B-phase winding 142; via transistors 14B and 14C, a C-phase current Ic is supplied to a C-phase winding 143; via transistors 14D and 14E, a D-phase current Id is supplied to a D-phase winding 144; and via transistors 14F and 14G, an E-phase current Ie is supplied to an E-phase winding 145.
- the phase curetns are driven independently of each other by the four transistors, thus allowing arbitary phase-by-phase indepennt control.
- the star-connected driving circuit in Fig. 14 can reduce the number of transistors from 20 in Fig. 8 to 10 , threby simplifying the structure of the driving circuit.
- the configuraiton of Fig. 8 has no current limitation such as exression (13), thus prividing a higher degree of current control.
- a distribution of the volgages and currents of the windings is changed between the motors in Figs. 8 and 14 .
- a product of a current capacity of each transistor and the number of transistors has no large difference between the inverters shown in Figs. 8 and 14 .
- the motor according to the present invention can be driven using either of the inverters.
- the method related to claim 3 is a method of supplying the rotor current Ir and is different from the method related to claim 2 that uses rotary transformer.
- Phase windings 141, 142, 143, 144 and 145 shown in Fig. 15 are the same as those shown in Fig. 14 , however, include a diode bridge 151 which is inserted at the position corresponding to the neutral point 146 to rectify the phase currents.
- Numeral 152 indicates a brush mounted to the stator
- numeral 153 indicates a slip rinig mounted to the rotor.
- numeral 154 indicates a brush and numeral 155 indicates a slip ring.
- Windings 8T, 8U, 8V, 8W and 8X respectively correspond to the rotor windings R1 and R1, R2 and R2, R3 and R3, R4 and R4, and R5 and R5.
- the stator current that has been rectified by the diode bridge 151 is supplied to the rotor using the two brushes 152 and 154, and the slip rings 153 and 155, and then supplied as rotor current Ir.
- the brushes and the slip rings are mounted in place of the rotary transformer 76 and the rectifying circuit 7H of Fig. 7 .
- the rotor current Ir can be generated from the stator current by using the diode bridge 151. Therefore, the driving circuit for the rotor current Ir shown in Fig. 8 can be simplified. Furthermore, the amplitude of the rotor current Ir can be permitted to passively match that of the stator current and thus the balance between the stator and the rotor can be reliably maintained. This configuration is simple and causes fewer error. However, the configuration and the method shown in Fig. 15 raise issues of reliability, useful life and maintenance burden. This method is suitable for an application where the rotation speed is low and the utilization ratio is low.
- the rotor current Ir may be supplied by a driving circuit, e.g., the power drive unit 8M shown in Fig. 8 .
- Fig. 26 another method will be described.
- the brushes and the slip rings shown in Fig. 15 are not used.
- a DC-AC converter enclosed by the broken line 290, a rotary transformer 8N and a rectifying circuit 8S are used.
- the configuration is the same as that shown in Fig. 8 .
- the DC-AC converter 290 includes transistors 291, 292, 293 and 294 which convert the direct current that is an output of the diode bridge 151 into alternating current, for supply to a primary winding 8P of the rotary transformer.
- Numeral 295 indicates a capacitor, a filter, or the like which prevents overvoltage.
- the rotary transformer includes a secondary winding 8Q whose output is converted to direct current by the rectifying circuit 8S, for supply as rotor current Ir to the rotor windings 8T, 8U, 8V, 8W and 8X.
- the functions of the configuration shown in Fig. 26 are substantially the same as those of the configuration shown in Fig.
- the amplitude of the rotor current Ir can be permitted to passively match the stator current.
- the issues of reliability, useful life and maintenance burden of the brushes and the slip rings can be settled.
- the stator current rapidly decreases in the configuration shown in Fig. 15 or 26 , decrease of the rotor current Ir is delayed because of being circulated in the diode. Accordingly, some measures, such as control of the current phase ⁇ i, are required.
- various modes of circuits can be used as the DC-AC converter 290.
- Connection to the brushes 152 and 154 may be established at a position between the DC power supply 81 and the inverter shown in Fig. 14 , i.e., may be inserted at the position indicated by the arrow 14H.
- This is a dirrect current for the inverter.
- an error may be caused beween the stator current and the rotor current.
- the error mentioned above may increase extremely and may greatly vary depending on the rotation speed, raising a serious problem.
- the problem may be settled by, e.g., controlling phase of the stator current.
- Fig. 16 is a cross-sectional view of a 4-pole motor based on the motor shown in Fig. 1 .
- the stator includes 20 slots and the rotor includes 20 slots.
- the stator has concentrated windings which are composed of five-phase and full-pitch windings.
- the driving circuit for the windings is shown in Fig. 17 .
- the A-phase winding 141 is separated into an A1-phase winding 171 and an A2-phase winding 172.
- the number of turns of the A1- and A2-phase windings 171 and 172 is the same as that of other phases so that the same voltage is obtained. Since the configuration other than the A1 and A2 phases is the same between Figs. 14 and 17 , description is omitted.
- Fig. 16 a method of supplying electrical power, or supplying rotor current, from the stator to the rotor will be described. Since the electrical power is supplied using the A1- and A2-phase windings 171 and 172, Fig. 16 shows only the A1- and A2-phase windings 171 and 172 as stator windings. As mentioned above, this motor is a 4-pole motor based on the motor shown in Fig. 1 . Accordingly, except for the A-phase winding, windings of other phases have the same configurations between Figs. 16 and 1 .
- the A1-phase winding 171 corresponds to windings 161, 162 and 163, and windings 164, 165 and 166 having a motor angle of ⁇ z that is in the range or 0° to 360° in electrical angle.
- the A1-phase winding 171 corresponds to windings 161, 162 and 163, and windings 164, 165 and 166 having a motor angle of ⁇ z that is in the range or 0° to 360° in electrical angle.
- the A2-phase winding 172 corresponds to windings 167, 168 and 169, and windings 16A, 16B and 16C having an electrical angle in the range or 360° to 720°.
- the A-phase current has directions indicated by the current symbols in Fig. 16 .
- the current symbols 167, 168, 16A and 16B of the A2-phase winding are reversely directed according to Formula (15).
- the supply current Ifa 165 and 167 cancel with each other, and 161 and 16B cancel with each other.
- the current supply directions of the supply current Ifa for 168 and 16A are reverse of those of the current symbols.
- magnetic flux ⁇ sup excited by the supply current Ifa will be 16F as indicated by the two-dot chain line.
- Due to the supply current Ifa which is supplied being superimposed on the A-phase current Ia magnetic flux of 720° period is obtained as a result of excitation.
- the configuration and operation shown in Fig. 14 apply to B, C, D and E phases.
- the rotor is wound by a power receiving G winding 16G and a power receiving H winding 16H which are perpendicular to each other for interlinkage of the magnetic flux ⁇ sup.
- the power receiving G winding 16G and the power receiving H winding 16H which are each wound at a pitch of 360°, are windings having a 720° period.
- current of the power receiving G winding 16G is inputted to a diode bridge 181 so that the AC voltage is rectified to DC.
- Current of the power receiving H winding 16H is inputted to a diode bridge 182 so that the AC voltage is rectified to DC.
- rotor current Ir is supplied.
- electrical power required for the rotor current Ir can be supplied from the stator to the rotor in a non-contact manner.
- the relationship between the AC supply current Ifa and the DC rotor current is simple similarly to the relationship between the primary current and the secondary current of a transformer. Accordingly, the rotor current Ir can be estimated from the stator side and can be precisely controlled by feedback control.
- the five-phase current of a 360° period in terms of electrical angle has a principally non-interfering relationship with the 720°-period supply current Ifa. Therefore, these currents are unlikely to affect the functions and performance of the five-phase motor. Since the supply current corresponds to the resistance consumption of the rotor winding and has a relatively small amplitude, the load and influence, which are caused by the supply of this rotor electrical power, on the control of the stator current are comparatively small.
- voltage drop of the diode bridges 181 and 182 corresponds to the voltage of four diodes. Accordingly, by adding a diode 183, voltage drop when the rotor current Ir is circulated can be reduced to 1/4.
- the method described referring to Fig. 16 or 17 may be modified in various ways in terms of the windings, rectifier, inverter, and the like. Phases other than the A phase may be used. All the phases may be used. In an application where the motor is used at substantially constant rotation, permanent magnets may be mounted to the stator, and the power receiving G winding 16G and the power receiving H winding 16H may be used as generator windings to thereby supply the rotor current Ir.
- the power receiving windings of the rotor may be a single-phase or three or more-phase winding instead of the two-phase winding of G and H shown in Fig. 16 . This may be applied to motors having a different number of phases other than five phases.
- the modified method uses a five-phase winding to supply the rotor current Ir.
- the stator winding has a 10-phase winding configuration in which the B, C, D and E phases each have two windings similarly to the A phase.
- B1- and B2-phase windings, C1- and C2-phase windings, D1- and D2-phase windings and E1- and E2-phase windings are configured so as to have a relationship similar to the A1- and A2-phase windings.
- phase currents Ib, Ic, Id and Ie are similar to the relationship expressed by Formulas (14), (15), (16) and (17).
- the supply current Ifa described referring to Figs. 16 and 17 has a single phase, single-phase AC current and voltage are used. However, the five-phase supply currents Ifa, Ifb, Ifc, Ifd and Ife use five-phase AD current.
- the five-phase supply currents generate 720°-period rotating magnetic flux ⁇ im for the rotor.
- the rotating flux ⁇ im has a frequency Fim which may be arbitrarily selected.
- the connecting method and the like shown in Figs. 16 and 18 apply herein, in terms of the power receiving G winding 16G and the power receiving H winding 16H of the rotor, and the rectifiers 181 and 182.
- the 720°-period rotating magnetic flux caused by the five-phase supply currents Ifa, Ifb, Ifc, Ifd and Ife interlinks with the power receiving G winding 16G and the power receiving H winding 16 to generate voltages Vg and Vh respectively in these windings.
- the voltages Vg and Vh are proportional to the product of the magnitude of the rotating magnetic flux and the difference between the frequency of the rotating magnetic flux and 1/2 of the electrical angular rotational frequency of the rotor rotation. As shown in Fig. 18 , the voltages Vg and Vh are rectified to supply the rotor current Ir. Therefore, it is necessary to precisely control the amplitude and the frequency Fim of the five-phase supply currents according to the rotation speed of the rotor.
- the frequency Fim of the five-phase supply currents is determined and controlled so that the difference between the electrical angular frequency Fim of the rotating magnetic flux ⁇ im and 1/2 of the electrical angular rotational frequency of the rotor will have a constant value Fs.
- the frequency of the voltage induced in the power receiving G winding 16G and the power receiving H winding 16H may be Fs.
- the amplitude of the five-phase supply currents may be determined and controlled according to the amplitude of the rotor current Ir to be supplied.
- the power receiving G winding 16G and the power receiving H winding 16H may be regarded to be the windings of the generator that generates power according to the rotating magnetic flux.
- the example described herein is based on an assumption that the rotating magnetic flux ⁇ im has a 720° period that is twice the period of the motor. However, similar power supply can be realized in an application or modification where the rotating magnetic flux ⁇ im has a period that is an integer multiple of 360°.
- power receiving windings for receiving the pulse current or the high frequency current may be provided so that the voltage of the power receiving windings can be full-wave-rectified, and the rotor current Ir may be supplied to the rotor windings 8T, 8U, 8V, 8W and 8X.
- magnetic flux components of spatial harmonics may be produced in the motor structure or in the airgap by stator current, a winding WKM may be provided to the rotor so that the spatial harmonic magnetic flux interlinks therewith, and the voltage of the winding WKM may be rectified for supply of the rotor current Ir.
- Claim 5 relates to the method and apparatus for controlling the motor of the present invention which is shown in Figs. 1 to 5 , 8 , 9 and 11 , Formulas (9) and (10), and the like.
- the torque of the motor of the present invention can be controlled by controlling the amplitudes of the stator current and the rotor current and the relative phase difference between these amplitudes.
- a total IWSP of the torque current components of the stator is made equal to a total IWRN of the torque current components of the rotor, i.e., control is performed as expressed by Formula (9).
- This method not only reduces the armature reaction, but also concentrates the circumferential magnetic flux density component BEN expressed by Formula (12) on the vicinity of the air gap. Accordingly, the force FEN expressed by Formula (12) can be increased. It should be noted that the field current component produces the magnetic flux density component BR in the radial direction.
- Claim 6 relates to the method and apparatus for controlling the motor of the present invention and the stator current which are shown in Figs. 1 to 6 , 8 , 9 , 11 and the like.
- the current phase ⁇ i of the stator is controlled relative to the circumferential position ⁇ r of the rotor winding RW.
- the current phase ⁇ i the ratio of the field current component and the torque current component can be arbitrarily controlled.
- the rotor current Ir is supplied so as to be balanced with the sum of the field current component and the torque current component. Examples of these controls have been described referring to Figs. 1 to 6 and the like.
- the magnitudes of the torque and the field magnetic flux can be controlled by variably controlling not only the current phase ⁇ i but also the magnitude or amplitude of current.
- One of other characteristics of the method of controlling the current phase ⁇ i as a parameter is that there is less current bias such as of allowing the amplitude of the stator current of a specific phase to increase more than the current values of other phases. This is because the field current component is separated from the torque current component due to the current phase ⁇ i. Thus, load is evenly imposed on the transistors of the driving inverter, thereby reducing the load of the driving inverter.
- the method using control of the current phase ⁇ i can rapidly reduce the value of the field magnetic flux component by changing the value of the current phase ⁇ i to a small value even when the rotor current Ir moderately decreases. Therefore, torque can be rapidly reduced.
- rapidly decreasing a large torque output is a required important performance for safety. It should be noted that simply rapidly decreasing the stator current for rapid decrease of the torque may allow increase of the field magnetic flux due to the rotor current. This may raise a new issue of overvoltage at high speed rotation.
- Figs. 1 to 5 The description referring to Figs. 1 to 5 has been provided by way of an example in which the same rotor current is supplied using five-phase stator current by connecting the windings of the slots in series.
- Stator current waveform has also been described by way of an example of the current having a rectangular waveform or the current having substantially a trapezoidal waveform.
- the stator current may have a sinusoidal waveform or may have various waveforms between rectangle and sine.
- the driving circuit 86 or the like of Fig. 8 can control the waveform of the current as desired.
- the control As the waveform of each phase current of the stator is approximated to a sinusoidal waveform, the control apparently exhibits similarities to the sinusoidal waveform control for the interior permaneng magnet motors based on conventional art.
- the motor of the present invention is different from the motors of the conventional art in that the rotor curren is present, or part of the rotor current serves as a field current component.
- unbalanced control is available between the stator current and the rotor current.
- the components that do not cancel the magnetomotive force of each other's current may affect the magnitude and distribution of the field magnetic flux.
- One of the aims of the motor of the present invention is to reduce loss of motor efficiency in the region of high current at low speed rotation or large torque output, or to reduce current capacity of the inverter. This leads to cost and size reduction.
- sinusoidal waveform and rectangular waveform are compared to each other from this point of view, AC voltage and AC current having a sinusoidal waveform and an amplitude of 1V and 1A will have an output of 0.5 W. In the case of AC voltage and AC current having a rectangular waveform and an amplitude of 1V and 1A, the output will be 1W.
- the rectangular waveform motor will have an output that is twice the output of the other.
- the rectangular waveform inverter can reduce the size of the inverter to 1/2. Loss herein is taken to be 0. Considering the loss of motor winding, copper loss corresponds to the product of the square of current and the winding resistance. Thus, when the output is the same, copper loss can be reduced to 1/2 in the rectangular waveform motor. Accordingly, the rectangular waveform motor can reduce its size.
- the size and the inverter capacity of the main engine motor of an electric vehicle depend on the performance under conditions of high current at low speed rotation or large torque output.
- Low speed rotation enables motor control with a voltage waveform or current waveform approximate to rectangle, which is advantageous from the perspective of size and cost reduction.
- operation at high speed rotation or operation with a load of middle or small torque causes no large disadvantage if the waveform is approximated to a sinusoidal waveform from a rectangular waveform.
- Rotor current has been described by way of an example in which the windings of the slots are connected in series and the same current is supplied to the individual slots.
- the number of turns may not necessarily be the same between the slots.
- distribution of the numbers of turns around the slots in the circumferential direction may be made suitable for a sinusoidal waveform.
- various types of rotor windings or various types of rotor currents may be used, although the motor structure may become complicated.
- the motor of the present invention is configured such that the torque current component IWSP of the stator and the torque current component IWRN of the rotor are carried in an opposing manner, via the airgap portion.
- One of the opposing currents is a positive current and the other is a negative current.
- a relationship shown in formula (1), formula (9), and the like is established.
- magnetomotive forces that are applied to the periphery by the opposing positive current and negative current are canceled, and the armature reaction hardly occurs in the periphery thereof.
- field magnetic flux can be generated with relative ease by various methods.
- the various methods include a field current component ISFAD that is carried to the stator, a field current component IRFAD that is carried to the rotor, a permanent magnet that is arranged in the rotor, and the like.
- the field magnetic flux can be generated through combined use of these methods and the above-described method for controlling the current phase.
- generated force and torque can be expressed by formula (11), formula (12), and the like.
- force is relatively generated between the stator and the rotor through the field magnetic flux ⁇ x.
- a current component Iu that is carried to the winding SA in Fig. 19 from the front of the drawing paper to the back side and returned from the winding SA/ can be added or a current component Iv that is carried from the front side of the drawing paper of the winding SC/ to the back side and returned from the winding SC can be added, and the field magnetic fluxes such as those shown by 196 and 197 can be generated by Iu, Iv, and the like.
- windings 194 and 195 in Fig. 19 can be added.
- a current Ix that is carried to the winding 194 from the front side of the drawing paper to the back side and returned from the back side to the front side by the winding 195 can be carried, and the field magnetic fluxes such as those shown by 196 and 197 can be generated.
- the windings 194 and 195 that are separate from the windings R1/ and R5 are required to be arranged and the necessary field current Ix is required to be carried.
- the windings 194 and 195 may be distributed among a plurality of slots.
- the windings 194 and 195 may be provided in slots that differ from those of the windings R1/ and R5. Furthermore, modifications such as currents being superimposed are also possible.
- the direction of the field magnetic flux within the rotor is a substantially fixed direction. Therefore, the field magnetic flux can also be generated by permanent magnets such 191 and 19A being arranged in the rotor.
- the above-described field current component ISFAD, the above-described field current component IRFAD, or the method for controlling the current phase ⁇ i can also be used in combination.
- the negative torque can be generated by the current phase ⁇ i being changed from a positive value to a negative value, and the direction of the field magnetic flux being reversed.
- the permanent magnets 191 and 19A are provided in the motor in Fig. 19
- the rotor current is set to zero and the energization direction of the stator current is reversed.
- the energization directions of both the rotor current and the stator current are reversed. In this manner, the configuration becomes slightly more complex than that of the motor in Fig. 2 and the like.
- the radial-direction magnetic flux component 22 can be generated by the permanent magnets 191 and 19A as a result of the permanent magnets 191 and 19A being permanent magnets that can be magnetized, demagnetized, or made to have magnetic characteristics of an arbitrary strength. Current load of field excitation can be reduced. Variations in the magnetic characteristics of the permanent magnets 191 and 19A can be achieved by magnetization and demagnetization through use of the stator current of each phase, the rotor current, and the like. In addition, combined use of the permanent magnets and the field current component, and the like is also, of course, possible.
- the armature reaction does not occur in the motor of the present invention. Therefore, leeway regarding demagnetization of the permanent magnet and the like can be significantly reduced.
- the motor can be configured through use of a small amount of the permanent magnets, such as by magnet thickness being reduced. The burden of cost can be reduced.
- the strength of the permanent magnet can be more easily varied. Even should demagnetization inadvertently occur, magnetization can be performed.
- Fig. 19 in a manner similar to the conventional permanent magnet motor, by the rotor current Ir and the field current component being reduced through use of the permanent magnets 191 and 19A, the flux barriers 192 and 193, and the like.
- operations shown in Fig. 1 to Fig. 5 and the like are performed.
- optimization of the operations can be performed.
- characteristics that combine the characteristics of the motor shown in Fig. 1 to Fig. 5 and the like and the characteristics of the conventional permanent magnet motor can be achieved.
- Fig. 19 shows a model with two poles to describe the principles. However, when the number of poles are increased to about eight poles, modification to a more practical shape can be performed.
- the permanent magnet can have a flat plate-like shape.
- Fig. 19 shows an example in which the rotor is substantially circular in shape.
- the outer circumference of the rotor may have an uneven shape.
- functions and performance are limited as a result of a simple configuration being used, various modifications are possible.
- a single rotor winding may be provided per pole.
- the configuration may be such that only a single turn of a slightly thick copper wire is arranged in the slots of the rotor. Simplification in terms of the manner in which the windings are mounted can be achieved. In this case, because the rotor current increases, a turn ratio of the rotary transformer 76 is required to be increased.
- the stator structure can be a simple concentrated-winding configuration.
- Fig. 20 is a time chart of the voltages and currents in the periphery of the rotary transformer. A horizontal axis indicates time. In this example, the rotary transformer is driven at 100 kHz. A single cycle thereof is 10 ⁇ sec.
- (a) is an example of the input voltage Vrp of the rotary transformer 8N in Fig. 8 .
- a portion indicated by 201 is an average voltage of which the pulse width is wide and relatively large.
- a portion indicated by 202 is an average voltage of which the pulse width is narrow and relatively small.
- (b) in Fig. 20 is a direct-current voltage Vrs that is a rectified output of the rotary transformer.
- the waveform of the direct-current voltage Vrs the rectified waveform of the input voltage Vrp.
- (c) in Fig. 20 is an example of the rotor current Ir.
- the rotor winding has a large inductance and a small winding resistance. Therefore, the rotor current Ir is a current value that is a first-order lag of the applied voltage.
- (d) in Fig. 20 is an example of the waveform of the input current Irp of the rotary transformer 8N.
- a broken line 203 is the waveform of the rotor current Ir.
- a broken line 204 is a negative value of 203.
- the input current Irp of the rotary transformer 8N can be measured by the current detection value 8R in Fig. 8 . That is, when a current value Itv that is supplied to the rotary transformer 8N is measured at a timing at which a large voltage is supplied to the rotary transformer 8N, the obtained value is a value that is proportional to the rotor current Ir. The value of the rotor current Ir can be measured.
- the rotor current Ir is required to be measured.
- the configuration is effective in that supplying of the rotor current Ir and detection of the rotor current Ir can be performed in the rotary transformer.
- the rotor current Ir is circulated by the rectification circuit 8S in Fig. 8 and is in a flywheel state. Calculation can be performed as an electric circuit of the rotary transformer 8N, the rectification circuit 8S, inductance Lr, and winding resistance Rr.
- (e) in Fig. 20 is a voltage waveform when a maximum voltage is supplied in the rotary transformer.
- a rotation position detection apparatus for the rotor is provided in a portion of the rotary transformer 76 in Fig. 7 , taking advantage of the rotary transformer 76 being excited at a high frequency.
- Fig. 21 is a diagram in which a horizontal axis is a motor angle ⁇ z, and each section of the rotation position detection apparatus is horizontally exploded such that the circumferential-direction shape that faces the airgap between the stator and the rotor in a linear state.
- (a) in Fig. 21 is 7E in Fig. 7 and is a position sensor unit on the stator side.
- Fig. 21 rectangular protruding portions 211 are arrayed in the circumferential direction at an interval of 22.5° electrical angle.
- Fig. 21 is 7F in Fig. 7 and 212 therein is a sensor magnetic pole that is arranged on the rotor side. A section through which magnetic flux passes and a section through which magnetic flux does not pass are formed by the protrusions and recesses thereof, for detection of the rotor position.
- the rotor rotation position ⁇ r in Fig. 21 is 0°.
- the sensor magnetic pole 212 is a protruding portion with a width of 45° electrical angle and a circumferential-direction pitch of 9°. A recessing portion is formed over the remaining 45°.
- the protruding portion 211 and the sensor magnetic pole 212 oppose each other with the airgap therebetween. Meanwhile, an A-phase detection winding 213 that has a pitch of 45° electrical angle is wound around the protruding portion 211, and the output thereof is Sa.
- a similar B-phase detection winding 214 is arranged such as to have a phase difference of 22.5° with the A phase detection winding 213 in the circumferential direction. The pitch of the B-phase detection winding 214 is 45° and the output thereof is Sb.
- the maximum and minimum voltages are repeated at a 90° interval.
- the maximum and minimum voltages are repeated at a 90° interval.
- the signals of Sa and Sb use a portion of the magnetic flux of the rotary transformer 76. Therefore, as shown in the example of the voltage waveform thereof in (a) in Fig. 20 , for example, when the frequency is 100 kHz, the voltage is an alternating-current voltage of the pulse width varies from 0 ⁇ sec to 5 ⁇ sec, based on the magnitude of the supplied power.
- Sa and Sb are each subjected to full-wave rectification.
- Direct-current signals Sax and Sbx are generated from the alternating-current signals.
- Sax and Sbx are normalized so as to be unaffected by the supply voltage of the rotary transformer.
- the voltage that is the rectified supply voltage of the rotary transformer is Vrs in (b) in Fig. 20 . Therefore, a filtering process is performed on this voltage and an average value Vrsa is generated.
- position signals Pa and Pb of two phases shown in Fig 22 are generated.
- Pa Sax / Vrsa
- Pb Sbx / Vrsa
- the normalized signals of Pa and Pb can also be obtained by an amplitude value CXV being determined by Sax and Sbx, and CXV being substituted for Vrsa in formulae (18) and (19).
- the two normalization methods, described above, may be combined.
- a technology for performing, by two sine-wave signals, interpolation calculation of a position within a sine wave period from two-phase sine-wave signals that mutually differ in phase by 90° is well known as a mainstream position detection technology used in resolvers for position detection, optical encoders, magnetic encoders, and the like.
- the position signals Pa and Pb in Fig. 22 are triangular-wave signals with a period of 90° electrical angle of the rotor.
- the position signals Pa and Pb have a phase difference of 22.5°.
- the shape of the sensor magnetic pole 212 may be changed from a rectangular shape to a rounded shape.
- the triangular-wave signal may be changed to be closer to a sine-wave signal.
- the periods of (a) and (b) in Fig. 21 may be 360° electrical angle.
- a multiple-layer position detection method involving two layers, three layers, or the like can be used.
- 215 of (c) in Fig. 21 is a position sensor unit on the stator side and has a width of 90°.
- 216 of (d) is a sensor magnetic pole that is arranged on the rotor side and has a width of 180°. The position sensor unit 215 and the sensor magnetic pole 216 configure a rotation position detection apparatus of a 360° electrical angle period.
- a winding 217 is a C-phase detection winding and has a pitch of 180°.
- the output thereof is Sc.
- a winding 218 is a D-phase detection winding and has a pitch of 180°.
- the winding 218 is arranged to have a phase difference of 90° with the C-phase detection winding 217 in the circumferential direction.
- the output thereof is Sd.
- the configurations of (c) and (d) in Fig. 21 are not shown in Fig. 7 and can be added in a manner similar to the configurations of the position sensor unit 7E and the sensor magnetic pole 7F.
- Pc and Pd in Fig. 22 can be generated from the signals Sc and Sc by a method which is similar to the signal processing of Sa and Sb.in a manner similar to that of Sa and Sb.
- Rotor position detection of 360° electrical angle can be performed.
- a highly accurate rotor position detection of 360° electrical angle can be performed.
- a fine/rough multiple-level position detection can be performed.
- precise position detection by (a) and (b) in Fig. 21 can become difficult because processing time becomes shorter in position detection at high-speed rotation.
- control can be performed mainly using the information of the rough position detecting unit in (c) and (d) in Fig. 21 .
- the configurations shown in Fig. 7 . Fig. 21, and Fig. 22 can be modified, combined, and the like in various ways.
- the windings 213, 214, 217, and 218 are shown to have a single-turn configuration.
- the number of turns is required to be optimized.
- position detection accuracy can be improved.
- a signal that has resilience against disturbances such as eccentricity in the rotor can be generated.
- determination of an absolute position at 360° mechanical angle may also be actualized by a means for detecting a specific position of the motor angle ⁇ z and incremental position detection in (a) and (b) in Fig. 21 .
- the motor of the present invention and the control apparatus thereof can, of course, be configured through use of an entirely different position detection apparatus, sensor-less position detection, or the like.
- Various control circuits are provided in the rotor.
- the method enables control of each current of the rotor as required.
- the same rotary transformer 8N as that in Fig. 8 is used as the power supply means of the rotor.
- the voltage of the rotary transformer 8N is the voltage shown in (e) in Fig. 20 .
- the rotary transformer 8N can function as a high-frequency alternating-current voltage source.
- the rotary transformer 8N can supply electric power from the stator side to the rotor side, perform rectification and obtain a direct-current voltage, and can be used for various types of control on the rotor side.
- the rotary transformer 8N can also perform power regeneration from the rotor side to the stator side.
- 23Q is a transmission/reception circuit on the stator side.
- the stator-side transmission/reception circuit 23Q outputs transmission signals, such as a command regarding the rotor current Ir and a command regarding the field current.
- the stator-side transmission/reception circuit 23Q also receives rotor information from the rotor side.
- 23 R is a communication means for communication by radio waves, communication by light, communication by high-frequency current components passing through the rotary transformer 8N, or the like.
- 23G is a transmission/reception circuit on the rotor side.
- the rotor-side transmission/reception circuit 23G receives the transmission signal from the stator-side transmission/reception circuit 23Q and outputs the transmission signal to a rotor-side control circuit 23H.
- the rotor-side transmission/reception circuit 23G also transmits rotor-side information from the rotor-side control circuit 23H to the stator-side transmission/reception circuit 23Q.
- the alternating-current voltages of 23E and 23F that are supplied from the rotary transformer 8N are rectified by the diodes that are connected in parallel to transistors 231, 232, 233, and 234.
- the direct-current voltage is stabilized by a capacitor 23D or the like.
- the rotor current Ir is carried by transistors 235 and 238.
- the transistors 231, 232, 233, and 234 are not required.
- the transistors 236 and 237 are not required.
- the rotor-side control circuit 23H detects a current value 23M of the rotor current Ir and compares the current value 23M with a command value of the rotor current Ir.
- the rotor-side control circuit 23H then outputs a control signal 23K for the transistors 231, 232, 233, and 234, and controls the rotor current Ir.
- alternating-current power can be supplied to the input winding 8P of the rotary transformer 8N from the stator side.
- the command value of the rotor current Ir can be transmitted to the rotor side by the communication means 23R.
- the rotor current Ir can be autonomously controlled on the rotor side.
- a control signal 23L for transistors 239, 23A, 23B, and 23C is outputted based on a command value of the current Ifx that is transmitted by the communication means 23R and a value of a current value 23N of the current Ifx. The current Ifx is thereby controlled.
- control of other currents of the rotor can be added in a similar manner as required.
- many types of currents can be controlled on the rotor side. Therefore, the functions and performance of the motor can be improved.
- the current of the rotor can be multiple phases and controlled. A winding that excites the field can be added on the rotor side, the field excitation can be performed.
- control of other currents of the rotor can be added in a similar manner as required.
- many types of currents can be controlled on the rotor side. Therefore, the functions and performance of the motor can be improved.
- the current of the rotor can be multiple phases and controlled. A winding that excites the field can be added on the rotor side, the field excitation can be performed.
- the rotary transformer 8N in Fig. 23 and Fig. 8 indicates the rotary transformer 76 in Fig. 7 .
- the rotary transformer may be the rotary transformer 241 shown in (a) in Fig. 24 .
- a three-phase alternating-current rotary transformer may be used.
- the generator 249 shown in (b) in Fig. 24 may be used.
- the power supply circuit of the transistors, diodes, and the like in Fig. 23 is required to be corrected. In these cases as well, power supply from the stator side to the rotor side and power regeneration from the rotor side to the stator side can be performed.
- An electric vehicle may be used in a dangerous area, such as an extremely cold region, an extremely hot region, a warzone, or the like. Even should a breakdown, such as damage to a component, occur, reliability and safety can be improved if the motor can be driven through use of the remaining normal sections of the electric vehicle.
- 815 in Fig. 8 is an abnormal operation monitoring means that monitors the states of the motor and the control apparatus thereof. The abnormal operation monitoring means performs detection of disconnection in the motor windings, insulation failure, and the like, and determines an abnormal state.
- the abnormal operation monitoring means stops operation of the faulty component, the section that is abnormally operating, and the like, and issues a command to drive the motor using the normal sections.
- the winding of each phase of the stator and the transistor bridge that drives the current thereof can be electrically separated and insulated from other phases.
- stopping and separating of a faulty section is facilitated.
- Emergency driving can be actualized at a higher probability. Reliability is thereby improved.
- the present invention is described above. However, various modifications, applications, and combinations are possible.
- the number of phases of the stator winding and the rotor winding of the motor can be changed to three phases, five phases, seven phases, eleven phases, and the like.
- Various types of skewing and the number of slots can also be selected. Discreteness attributed to the number of slots can resolved.
- performance and characteristics of the motor of the present invention can be achieved.
- the number of components in the driving apparatus increases as a result of multiple phases. However, high integration technology and the like are possible. Electrical increase in the power unit does not occur in theory.
- Regarding the number of poles an example of two poles is mainly given.
- winding method of the windings can be concentrated winding, distributed winding, short-pitched winding, toroidal winding, or the like.
- Superconductive winding and various cooling mechanisms can also be used.
- an outer-rotor motor As the shape of the motor, an outer-rotor motor, an axial gap motor, a linear motor, or motor shapes such as conical or multi-stepped can be selected.
- a composite motor in which a plurality of motor elements are provided in an inner/outer radial direction or a rotor axial direction is also possible.
- combination with other types of motor elements is also possible.
- various materials such as a thin electromagnetic steel sheet, a 6.5% silicon steel sheet, amorphous metal, ferrite, a powder magnetic core, or permendur can be used.
- various permanent magnets can be used.
- Various high-strength materials and mechanisms can also be used.
- the present invention includes the present invention to which these technologies have been applied.
- the present invention includes the present invention to which these technologies have been applied.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Control Of Ac Motors In General (AREA)
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016234618 | 2016-12-02 | ||
| JP2017004918A JP7126150B2 (ja) | 2016-12-02 | 2017-01-16 | モータ |
| PCT/JP2017/042157 WO2018101158A1 (fr) | 2016-12-02 | 2017-11-24 | Moteur et dispositif de commande associé |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3570431A1 true EP3570431A1 (fr) | 2019-11-20 |
| EP3570431A4 EP3570431A4 (fr) | 2020-12-16 |
Family
ID=62566527
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP17876042.7A Withdrawn EP3570431A4 (fr) | 2016-12-02 | 2017-11-24 | Moteur et dispositif de commande associé |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3570431A4 (fr) |
| JP (1) | JP7126150B2 (fr) |
| CN (1) | CN110235356B (fr) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11777384B2 (en) | 2019-02-09 | 2023-10-03 | Nam Soo Myung | Electromagnetic machine using magnetic field binding of multiple multi-phase winding wires |
| CN110492710B (zh) * | 2019-09-20 | 2021-02-26 | 齐鲁工业大学 | 一种双转子发电机及其控制方法 |
| CN110767429B (zh) * | 2019-11-01 | 2020-11-10 | 北京动力机械研究所 | 可高速运行的磁阻式旋转变压器 |
| CN113824289A (zh) * | 2021-09-18 | 2021-12-21 | 长沙硕博电机有限公司 | 一种定向电枢电流的直流电动机及直流电动机控制方法 |
| CN114513106B (zh) * | 2022-01-24 | 2024-01-30 | 国网河南省电力公司电力科学研究院 | 一种基于pwm思想的永磁同步直线电机磁极结构设计方法 |
| CN116902228B (zh) * | 2023-09-06 | 2023-11-17 | 长光卫星技术股份有限公司 | 一种飞轮系统及其驱动控制方法,电子设备和存储介质 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5838077B2 (ja) * | 1976-06-24 | 1983-08-20 | 株式会社東芝 | 無整流子電動機の制御装置 |
| JPS531814A (en) * | 1976-06-28 | 1978-01-10 | Toshiba Corp | Control unit of induction motor |
| US4573003A (en) | 1983-09-30 | 1986-02-25 | Wisconsin Alumni Research Foundation | AC Machine optimized for converter operation |
| JPS62104491A (ja) * | 1985-10-31 | 1987-05-14 | Secoh Giken Inc | 半導体電動機 |
| US5418446A (en) | 1993-05-10 | 1995-05-23 | Hallidy; William M. | Variable speed constant frequency synchronous electric power generating system and method of using same |
| SE526270C2 (sv) | 2003-03-19 | 2005-08-09 | Forskarpatent I Syd Ab | Seriemagnetisering av synkronmotorer |
| CN1825739A (zh) | 2005-02-26 | 2006-08-30 | 丁振荣 | 一种感应磁阻电机及其变频装置 |
| JP5120586B2 (ja) * | 2005-06-28 | 2013-01-16 | 株式会社デンソー | 界磁巻線型同期機 |
| US7508086B2 (en) * | 2006-03-24 | 2009-03-24 | General Electric Company | Aircraft engine starter/generator and controller |
| JP4853232B2 (ja) | 2006-10-27 | 2012-01-11 | 株式会社デンソー | 回転電機装置 |
| JP5287824B2 (ja) * | 2010-10-20 | 2013-09-11 | 株式会社デンソー | モータ |
| US9318937B2 (en) | 2013-03-20 | 2016-04-19 | Hamilton Sundstrand Corporation | Flux controlled PM electric machine rotor |
| JP6355251B2 (ja) * | 2013-08-26 | 2018-07-11 | 梨木 政行 | モータ |
-
2017
- 2017-01-16 JP JP2017004918A patent/JP7126150B2/ja active Active
- 2017-11-24 CN CN201780085312.9A patent/CN110235356B/zh active Active
- 2017-11-24 EP EP17876042.7A patent/EP3570431A4/fr not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018093695A (ja) | 2018-06-14 |
| CN110235356A (zh) | 2019-09-13 |
| CN110235356B (zh) | 2023-03-21 |
| EP3570431A4 (fr) | 2020-12-16 |
| JP7126150B2 (ja) | 2022-08-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3570431A1 (fr) | Moteur et dispositif de commande associé | |
| US11283385B2 (en) | Motor system provided with both motor having multiple-phase stator windings and control device controlling the motor | |
| US9083276B2 (en) | Rotary electric machine driving system | |
| US20130334937A1 (en) | Rotary electric machine driving system | |
| JP5827026B2 (ja) | 回転電機及び回転電機駆動システム | |
| US9124159B2 (en) | Electromagnetic rotary electric machine | |
| JP5120586B2 (ja) | 界磁巻線型同期機 | |
| US11283384B2 (en) | Motor system provided with both motor having multiple-phase stator windings and control device controlling the motor | |
| JP2012222941A (ja) | 回転電機 | |
| JP2010022185A (ja) | 同期機 | |
| EP3484044B1 (fr) | Moteur triphasé à 6 lignes | |
| US10063127B2 (en) | Multiple-phase AC electric motor whose rotor is equipped with field winding and diode | |
| US20120038301A1 (en) | Polyphase AC Motor, Driving Device and Driving Method Therefor | |
| JP5626306B2 (ja) | 回転電機制御システム | |
| JP6075161B2 (ja) | スイッチトリラクタンスモータの制御装置 | |
| JP5623346B2 (ja) | 回転電機駆動システム | |
| JP2013110942A (ja) | 回転電機及び回転電機制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20190624 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| A4 | Supplementary search report drawn up and despatched |
Effective date: 20201113 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: H02P 25/22 20060101ALI20201109BHEP Ipc: H02K 11/21 20160101ALI20201109BHEP Ipc: H02P 9/30 20060101ALI20201109BHEP Ipc: H02P 23/28 20160101AFI20201109BHEP Ipc: H02P 6/32 20160101ALI20201109BHEP Ipc: H02K 17/40 20060101ALI20201109BHEP Ipc: H02P 23/00 20160101ALI20201109BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20221202 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20230413 |