EP3552729A1 - Dispositif d'installation de rivets auto-poinçonneurs - Google Patents
Dispositif d'installation de rivets auto-poinçonneurs Download PDFInfo
- Publication number
- EP3552729A1 EP3552729A1 EP19160692.0A EP19160692A EP3552729A1 EP 3552729 A1 EP3552729 A1 EP 3552729A1 EP 19160692 A EP19160692 A EP 19160692A EP 3552729 A1 EP3552729 A1 EP 3552729A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- punch
- drive
- support arm
- punch riveting
- components
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005304 joining Methods 0.000 claims abstract description 34
- 239000000463 material Substances 0.000 claims description 7
- 238000004080 punching Methods 0.000 claims description 6
- 230000007246 mechanism Effects 0.000 claims description 2
- 238000005452 bending Methods 0.000 description 10
- 230000010355 oscillation Effects 0.000 description 8
- 238000004519 manufacturing process Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 5
- 238000010276 construction Methods 0.000 description 3
- 238000003825 pressing Methods 0.000 description 3
- FYYHWMGAXLPEAU-UHFFFAOYSA-N Magnesium Chemical compound [Mg] FYYHWMGAXLPEAU-UHFFFAOYSA-N 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- 239000004918 carbon fiber reinforced polymer Substances 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000011777 magnesium Substances 0.000 description 2
- 229910052749 magnesium Inorganic materials 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000011152 fibreglass Substances 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 230000005012 migration Effects 0.000 description 1
- 238000013508 migration Methods 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21J—FORGING; HAMMERING; PRESSING METAL; RIVETING; FORGE FURNACES
- B21J15/00—Riveting
- B21J15/02—Riveting procedures
- B21J15/025—Setting self-piercing rivets
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21J—FORGING; HAMMERING; PRESSING METAL; RIVETING; FORGE FURNACES
- B21J15/00—Riveting
- B21J15/10—Riveting machines
- B21J15/12—Riveting machines with tools or tool parts having a movement additional to the feed movement, e.g. spin
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21J—FORGING; HAMMERING; PRESSING METAL; RIVETING; FORGE FURNACES
- B21J15/00—Riveting
- B21J15/10—Riveting machines
- B21J15/16—Drives for riveting machines; Transmission means therefor
Definitions
- the present invention relates to punch riveting with a vibrating system, in particular so-called. Ultraschallstanznietvortechnischen.
- Methods and devices for punch riveting serve for connecting at least two in a connecting region in particular flat trained components.
- a punch riveting method is characterized in that a pre-punching of the components to be joined together is not required. Rather, a rivet is pressed by means of a punch or a punch tool in the at least two components, which is ensured by a correspondingly shaped counter-holder, for example in the form of a die, which cooperates with the punch tool, that the rivet in a certain manner within deformed the components to be joined together to produce a positive and positive connection between the components while avoiding penetration of the rivet facing away from the component.
- ultrasonic punch riveting methods or devices are known in which a vibration generator, such as an ultrasonic generator is used to enable one or more components in connecting the components in vibration. By this vibration, for example, the force to be applied for pressing the rivet is reduced.
- the invention is based on a punch riveting device for connecting at least two components by means of a rivet, with a punch and a counter-holder, between which the at least two components and the rivet can be arranged.
- the punch riveting on a vibrating system, which in turn has the punch and a vibration converter which is so coupled or coupled to a vibration generator that the vibrating system can be excited to vibrate.
- the oscillation converter may be used, for example, as an electro-mechanical converter, such as an electro-mechanical converter. Be formed piezo-converter and directly or indirectly via a so-called.
- Booster or amplitude amplifier
- the vibration generator can in particular be a frequency or sound generator, in particular an ultrasonic generator, in each case preferably also in the form of a function generator which supplies the vibration converter with a suitable signal, so that it is excited accordingly to oscillate.
- the punch riveting apparatus further comprises a drive, by means of which the oscillating system and thus the punch can be acted upon by a force and movable in a joining direction to a arranged between the punch and a stamp facing component of at least two components arranged rivet by means of the punch in the at least push in two components.
- the problem with known punch riveting devices with vibration coupling may be that undesired tilting moments occur. This is especially true when the drive and the oscillating system are arranged in the joining direction in series or one behind the other. However, this can also occur if the drive and the oscillating system are arranged to overlap parallel or at least in the joining direction, but the drive is regularly mounted on the frame of the punch riveting device.
- a guide means disposed on a frame of the punch riveting apparatus, in which a support arm extending at an angle of more than 0 ° and less than 180 °, in particular more than 45 ° and less than 135 °, in particular extends substantially 90 ° to the joining direction, feasible in the joining direction and is movable by means of the drive, wherein the oscillating system is arranged on the support arm perpendicular to the joining direction of the guide device spaced.
- the support arm may in particular be fixedly connected to a carriage, which is mounted so that it can be guided in the guide device.
- suitable bearings such as roller ball or plain bearings can be provided. Likewise, such bearings may be provided on the carriage.
- the support arm used can be designed to be particularly stiff or torsion-resistant, and on the other hand, this support arm can also be performed particularly stable and straight in the guide device. This is achieved in particular because, in the proposed punch riveting apparatus, the oscillating system is no longer fixed or arranged via the drive on the frame, but rather via the support arm and the guide device. The latter two can be much more stable and stiffer than is the case with a conventional drive.
- the support arm may preferably consist of a stiffer material than the frame, so that the necessary rigidity is achieved.
- steel, high-strength steel, CFRP (carbon fiber reinforced plastic) or fiberglass-reinforced plastic may be used as materials for the support arm.
- CFRP carbon fiber reinforced plastic
- Aluminum or magnesium or materials containing aluminum and / or magnesium are also conceivable. It is also conceivable, for example, a truss structure, a pipe construction or a profile (for example, a T-profile, a double-T profile or a U-profile) or the like for the support arm. This can in turn be done in particular with the mentioned materials.
- the drive is arranged on the frame and connected directly to the support arm.
- the drive may be a spindle drive or the like. The movement of the drive is then converted directly into a movement of the support arm and is particularly easy to provide.
- the drive is arranged on the frame and coupled by means of a lever to the support arm or possibly the carriage.
- a lever may in particular be coupled between a pivot point on which the lever is rotatably mounted on the frame, and a point of application of the drive on the lever with the support arm or optionally via the carriage.
- an arrangement of the drive at another position on the frame is possible.
- the drive is integrated in the guide device and in particular is designed as a linear drive.
- the drive is integrated in the guide device and in particular is designed as a linear drive.
- the lever is coupled by means of link guide with the support arm.
- a slot or the like may be provided, in which a guide pin or the like, which is arranged on the carriage or on the support arm, is guided. Through the slot or generally the scenery, the rotational movement of the lever can be particularly easily implemented in a linear movement of the carriage or the support arm.
- a further guide device arranged on the frame of the punch riveting device perpendicular to the joining direction and spaced from the guide device in which the carrier arm can be guided in the joining direction.
- two guide means are present, by means of which the support arm is guided, whereby an even higher torsional strength achieved becomes.
- the drive can then be used as previously explained. For example, a connection is only necessary on one of the carriages.
- a compensating element is provided which is arranged in the punch riveting device such that upon movement or actuation of the compensating element, an orientation of the ram and the counter-holder to one another changes.
- the oscillating system is arranged on the drive, in particular directly attached thereto, wherein the compensating element between the oscillating system and the drive is arranged.
- the compensating element in this case particularly preferably has a wedge plate, as will be explained in more detail below.
- the compensating element is arranged in the frame of the punch riveting device.
- the frame can be easily bent actively, so that any bending or tilting, which arises during regular operation of the punch riveting, can be compensated.
- the compensation element in this case particularly preferably has an actuator, as will be explained in more detail below.
- a arranged on a frame of the punch riveting guide means in which a perpendicular to the joining direction extending support arm in the joining direction is feasible and movable by means of the drive, wherein seen on the support arm perpendicular to the joining direction spaced the oscillating system is arranged.
- the compensation element is then preferably arranged in the support arm.
- the support arm can be actively bent or tilted, for example, in order to counteract any possible slight tilting which may still occur despite the support arm.
- the compensating element proposed according to the second aspect of the invention may be used at the other positions or positions mentioned in relation to the second aspect, even though the support arm and guide means are used as mentioned with respect to the first aspect ,
- the compensation element has an actuator, in particular a piezoelectric actuator, a hydraulic actuator, a mechanically actuated actuator or a lever mechanism on.
- actuators can be controlled particularly easily automated, allowing a quick and easy application.
- a piezoactuator for example, integrated in a support arm near an outer side, can be expanded by applying an electrical voltage, which causes a slight bending of the support arm.
- the compensating element has a wedge plate that is rotatable and / or translationally movable. For example, by inserting such a wedge plate in a corresponding gap in the frame, the support arm or other component, a slight bend can be achieved.
- an actuating device which is adapted to actuate the compensation element automatically.
- the Actuator be adapted to actuate the compensation element such that an angle which is included between a movement and force application direction of the oscillating system and a perpendicular to a surface of the components, in terms of size is smaller.
- Such an actuating device for example, in the context of a control or regulation of the punch riveting in their operation can be operated accordingly to counteract any tilting or bending quickly.
- the tilt can be detected or measured for example by means of suitable sensors.
- a suitable model by means of which it is estimated or predefined when and to what extent an actuation of the compensating element should take place.
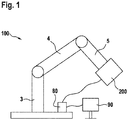
- FIG. 1 is simplified and shown schematically a manufacturing device 100.
- the production device 100 may be, for example, an industrial robot in a production hall, for example for an automotive body construction.
- the production device 100 has a carrier structure 3 arranged on a base and two arms 4 and 5 arranged thereon and connected to one another and movable.
- a punch riveting device 200 is arranged in a preferred embodiment, which is shown here only schematically and will be described in more detail below.
- a computing unit 80 is shown, which is, for example, a control unit of the punch riveting apparatus 200.
- the arithmetic unit 80 may also be used as a control unit for the entire manufacturing facility, i. be provided in addition to the punch riveting especially for the control of the movable arms.
- display means 90 for example a display, are provided on which, for example, current operating parameters of the punch riveting apparatus can be displayed.
- the element 90 may also be a combined display / input means, e.g. a touchscreen, act.
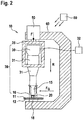
- FIG. 2 schematically a non-inventive punch riveting apparatus 10 is shown, at which a problem to be solved, which is achieved with the present invention.
- the punch riveting apparatus 10 has a frame 60, which is preferably in the form of a C-frame or C-bracket, on which the individual components are usually arranged in a punch riveting apparatus in order to be able to assume the desired position relative to one another.
- the punch rivet 10 for example, on an arm as in FIG. 1 be shown attached.
- the punch riveting apparatus 10 has a punch (or sonotrode) 15, by way of example with a round cross section.
- the punch 15 is radially surrounded by a (sleeve-shaped) hold-down 16 and arranged movable relative to this in the longitudinal direction.
- the hold-down device is preferably fastened to a so-called zero-amplitude passage of the punch, ie a position of the punch at which oscillation amplitudes are zero or at least as low as possible, by means of a spring.
- the stamp 15 with a drive 50 coupled which serves to apply a force required for pressing the rivet 20 in the two components 11, 12 force F in the joining direction R.
- the drive 50 can be controlled, for example, by means of the computing unit 80.
- the force F can be predetermined, for example, via a desired value and recorded as an actual value.
- the hold-down 16 is adapted to press against the surface of the die 15 facing member 11 with a hold-down force.
- a separate drive can be provided.
- the hold-down 16 may also (as shown here) be coupled to the drive 50 of the punch 15 or to the punch 15 itself, for example by means of a spring.
- a counter-holder in the form of a die 18 is arranged on the stamp 15 and the hold-down 16 opposite side of the two components 11, 12, a counter-holder in the form of a die 18 is arranged.
- the punch 15 and the die 18 are in the vertical direction, as well as the hold-16, arranged and movable relative to each other, wherein the die 18 itself is not movable in the rule.
- the hold-down 16 and the die 18 serve to clamp or compress the two components 11, 12 between the hold-down 16 and the die 18 during processing by the punch 15.
- the rivet 20 here by way of example a semi-hollow punch rivet, preferably consists of a material which is harder than the materials of the two components 11, 12, at least in the region of a rivet shank.
- the component 11 facing away from the flat top of the rivet 20 is arranged in operative connection with the punch 15, which rests flat against the top of the rivet 20.
- the punch 15 is operatively connected to an (electro-mechanical) vibration converter 30, for example a piezo-converter.
- the oscillation converter 30 in turn is connected to an (electric) oscillation generator 32, for example an ultrasonic generator.
- an (electric) oscillation generator 32 for example an ultrasonic generator.
- vibrations or vibrations can be generated and coupled to the ram 15, and thus the rivet 20.
- the vibration generator 32 and the vibration converter 30 ultrasonic vibrations with a vibration amplitude (distance between maximum positive and negative amplitude of a vibration) between 10 .mu.m and 110 .mu.m (corresponding to an amplitude of 5 .mu.m to 55 .mu.m) and a frequency between 15 kHz and 35 kHz or if necessary also produced higher.
- the oscillator 32 is connected to the arithmetic unit 80 (or may also be part of the arithmetic unit) and can be controlled by it.
- the drive 50 can be, for example, a ball, roller, planetary thread or threaded roller screw drive or the like which is suitable for applying a force F for pressing in the rivet 20 into the components 11, 12.
- a holding device 35 for example in the form of a frame or a frame attached.
- a vibration system 39 which in the present case comprises the oscillation converter 30, a booster 31 and the punch or the sonotrode 15 and the hold-down 16, respectively.
- the high-frequency longitudinal oscillation of the joining tool i. Sonotrode 15, booster 31 and vibration converter 30 come to a lateral migration or kinking or evasion of the joining tool.
- Such lateral forces are in FIG. 2 exemplified by F Q. Moreover, in FIG. 2 the tilting of the joining tool or of the entire oscillating system 39 is also shown graphically. Such transverse forces are not known in previous, conventional punch riveting devices (without vibration or ultrasound support) in these magnitudes, since the joining tool is not subjected to high-frequency longitudinal vibrations.
- FIGS. 3 to 9 are shown schematically punch riveting according to the invention in various preferred embodiments.
- the basic components of these punch riveting apparatuses correspond to the components of the punch riveting apparatus 10 according to FIG. 2 and are so far with the same Provided with reference numerals. In this respect, reference is also made to the description there. The clarity, however, some components are not shown.
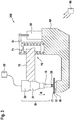
- FIG. 3 schematically a punch rivet 200 according to the invention is shown in a preferred embodiment.
- the punch riveting apparatus 200 has a vibration system 39 with oscillation converter 30, booster 31 and sonotrode or stamp 15.
- the oscillating system 39 is attached to a support arm 70. This can be done either directly or for example by a suitable holder, as in FIG. 2 shown. Such a holder would then be attached according to the side of the support arm 70 and not on the drive.
- the support arm 70 extends here perpendicular to the joining direction R and is attached to a carriage 71.
- This carriage 71 is arranged to be guidable in the joining direction R in a guide device 75 designed as a guide rail.
- roller bearings are provided by way of example.
- the guide device or the guide rail 75 may in this case be part of the frame 60 or else manufactured as an independent component and then suitably fastened to the frame. In this way, the support arm 70 in the guide device 75 and in the joining direction R can be performed.
- the drive 50 is arranged on the frame 60 and coupled by means of a lever 51 with the carriage 71 and thus with the support arm 70.
- the lever 51 may be rotatably attached to a part of the guide means 75, for example by means of a hinge.
- the drive 50 can incidentally, ie in particular with regard to its operation, as with respect to FIG. 2 be explained explained.
- the oscillating system 39 is therefore particularly stable in the joining direction R feasible and movable.
- any resulting from lateral forces tilting or bending can be avoided or at least reduced.
- the guide device 75 which can be configured in a particularly stable manner
- the support arm 70 which can be configured in a particularly rigid manner, as has already been explained in detail above.
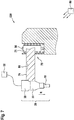
- FIG. 4 schematically a punch rivet 300 according to the invention is shown in a further preferred embodiment.
- the lever 51 is also the same as in the punch riveting apparatus 200 of FIG. 3 attached to guide means 75 by means of a hinge, but at a different location.
- the lever 51 is not coupled by means of a joint directly to the carriage 71, but via a provided in the lever 51 and its lever arm slot 52 together with a provided on the carriage 71 guide pin 72. In this way, a so-called. Slotted guide educated.
- the drive 50 can be compared to the embodiment according to FIG. 2 For example, be formed shorter or arranged at another position.
- FIG. 5 schematically a punch rivet 400 according to the invention is shown in a further preferred embodiment.
- the punch riveting device 400 two guide devices 75 and 76 are provided on the frame, each with a slide 71 and 73, respectively.
- the support arm 70 is fastened to both slides 71 and 73, so that an even higher stability for reducing or reducing the use of only one guide device Avoidance of any tilting is achieved.
- the drive 50 is in this case arranged directly between the frame 60 and the support arm 70.
- no translation it is understood, however, that the drive 50 can be connected here by means of a lever, as for example in the Figures 3 or 4 is shown. It is then sufficient if the lever is only coupled to one of the carriages.
- FIG. 6 schematically a punch rivet 500 according to the invention is shown in a further preferred embodiment.
- the drive 50 is in this case integrated in the guide device 75 and can be designed in particular as a linear drive. This allows a more compact design than with externally arranged drive can be achieved.
- FIG. 7 schematically a punch rivet 600 according to the invention is shown in a further preferred embodiment, as in FIG. 6 is shown. For the sake of clarity, however, only a part of the punch riveting apparatus is shown here.
- a compensating element 85 is provided on a region opposite to the joining direction R.
- This compensating element 85 can be, for example, a piezoelectric element that can be changed in length by applying a suitable voltage in a direction perpendicular to the joining direction R, and thus in particular in the direction of alignment or main extension direction of the support arm 70.
- An activation of the compensating element 85 can take place, for example, by means of the arithmetic unit 80.
- a linear drive is shown as a drive 50, it is understood that the compensation element, in particular when it is arranged in the support arm, with other types of drives, as for example in the FIGS. 3 to 5 are shown can be used.
- FIG. 8 schematically a punch rivet 700 according to the invention is shown in a further preferred embodiment, as in FIG. 6 is shown.
- a punch rivet 700 according to the invention is shown in a further preferred embodiment, as in FIG. 6 is shown.
- a part of the punch riveting apparatus is shown here, namely in particular without the counterholder, the rivet and the components to be connected.
- Such a wedge plate can cover, for example, only a part of the cross-sectional area of the support arm, so that furthermore a high stability of the support arm is ensured.
- an actuating device 87 is provided, by means of which the wedge plate can be automated, for example by actuation of the arithmetic unit 80, actuated or moved.
- the wedge plate 86 can for this purpose be rotated and / or moved translationally, so as to change the orientation of the oscillating system 39.
- the actuating device may be configured to actuate the compensation element such that an angle which is included between a movement and force application direction of the oscillating system and a perpendicular to a surface of the components is smaller in magnitude. In this way, for example occurring during the punch riveting process tilting or bending can be compensated.
- FIG. 9 schematically a punch rivet 800 according to the invention is shown in a further preferred embodiment.
- the punch riveting apparatus 800 is similar to that in FIG. 2 constructed punching riveting, but the vibration system 39, ie without support, is arranged on the drive 50 directly.
- a compensating element designed as a wedge plate 86 is arranged between the drive 50 and the oscillating system 39 or the oscillation converter 30.
- This wedge plate may be like that FIG. 8 explained wedge plate be constructed and used.
- an actuating device (not shown here) to be provided to rotate and / or translate the wedge plate as indicated. Even with such an arrangement of the wedge plate tilting or bending can be compensated.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Presses And Accessory Devices Thereof (AREA)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102018205526.2A DE102018205526A1 (de) | 2018-04-12 | 2018-04-12 | Stanznietvorrichtungen |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3552729A1 true EP3552729A1 (fr) | 2019-10-16 |
| EP3552729B1 EP3552729B1 (fr) | 2021-01-27 |
Family
ID=65686782
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19160692.0A Active EP3552729B1 (fr) | 2018-04-12 | 2019-03-05 | Dispositif d'installation de rivets auto-poinçonneurs |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3552729B1 (fr) |
| DE (1) | DE102018205526A1 (fr) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102021120409A1 (de) | 2021-08-05 | 2023-02-09 | Tox Pressotechnik Gmbh & Co. Kg | Vorrichtung zum Durchsetzfügen |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1128851A (fr) * | 1955-05-25 | 1957-01-11 | Kumag A G | Machine à river |
| US3483611A (en) * | 1966-08-12 | 1969-12-16 | Cavitron Corp | Methods and apparatus for assembling parts together by ultrasonic energy |
| DE19905527A1 (de) * | 1999-02-10 | 2000-08-17 | Boellhoff Gmbh | Vorrichtung zum Fügen von Werkstücken aus duktilem Material |
| DE102008039872A1 (de) * | 2008-08-27 | 2010-03-04 | Robert Bosch Gmbh | Widerstandsschweißanordnung |
| DE102012102309A1 (de) * | 2012-03-19 | 2013-09-19 | Tkr Spezialwerkzeuge Gmbh | Nietbügel zum Setzen von Nieten |
| DE102014224596A1 (de) * | 2014-12-02 | 2016-06-02 | Robert Bosch Gmbh | Stanznietzange mit Vibrationsunterstützung in X-Bauart |
| DE102015007295B3 (de) * | 2015-06-10 | 2016-09-08 | Audi Ag | Setzvorrichtung |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB0813883D0 (en) | 2008-07-30 | 2008-09-03 | Henrob Ltd | Joining apparatus and method |
| DE102014203357B4 (de) | 2014-02-25 | 2016-11-03 | Henkel Ag & Co. Kgaa | Darreichungseinheit für eine Masse |
| DE102014203757B4 (de) * | 2014-02-28 | 2022-03-31 | Robert Bosch Gmbh | Verfahren zum Verbinden wenigstens zweier Bauteile im Stanznietverfahren, Vorrichtung zum Durchführung des Verfahrens, Fertigungseinrichtung und Verwendung des Verfahrens |
| DE102017205659A1 (de) * | 2017-04-03 | 2018-10-04 | Robert Bosch Gmbh | Stanznietvorrichtung zum setzen eines stanzniets mit einer eine stempelkraft unterstützenden schwingung und verfahren zum stanznieten mit einer solchen stanznietvorrichtung |
-
2018
- 2018-04-12 DE DE102018205526.2A patent/DE102018205526A1/de not_active Withdrawn
-
2019
- 2019-03-05 EP EP19160692.0A patent/EP3552729B1/fr active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1128851A (fr) * | 1955-05-25 | 1957-01-11 | Kumag A G | Machine à river |
| US3483611A (en) * | 1966-08-12 | 1969-12-16 | Cavitron Corp | Methods and apparatus for assembling parts together by ultrasonic energy |
| DE19905527A1 (de) * | 1999-02-10 | 2000-08-17 | Boellhoff Gmbh | Vorrichtung zum Fügen von Werkstücken aus duktilem Material |
| DE102008039872A1 (de) * | 2008-08-27 | 2010-03-04 | Robert Bosch Gmbh | Widerstandsschweißanordnung |
| DE102012102309A1 (de) * | 2012-03-19 | 2013-09-19 | Tkr Spezialwerkzeuge Gmbh | Nietbügel zum Setzen von Nieten |
| DE102014224596A1 (de) * | 2014-12-02 | 2016-06-02 | Robert Bosch Gmbh | Stanznietzange mit Vibrationsunterstützung in X-Bauart |
| DE102015007295B3 (de) * | 2015-06-10 | 2016-09-08 | Audi Ag | Setzvorrichtung |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102018205526A1 (de) | 2019-10-17 |
| EP3552729B1 (fr) | 2021-01-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE19905527B4 (de) | Vorrichtung zum Fügen von Werkstücken aus duktilem Material | |
| EP2146818B1 (fr) | Porte-outil modulaire | |
| EP0890397A1 (fr) | Appareil et procédé de joindre Mécaniquement des tÔles, des profilés et/ou des connections de tÔles multiples | |
| EP3505270B1 (fr) | Unité de frappe pour un dispositif de poinçonnage, dispositif de poinçonnage et procédé de fabrication d'un tel dispositif de poinçonnage | |
| EP3117923B1 (fr) | Procédé de liaison d'au moins deux composants au moyen d'un dispositif de rivetage et dispositif de fabrication | |
| EP3120951B1 (fr) | Dispositif de rivetage et dispositif de fabrication | |
| DE102015007295B3 (de) | Setzvorrichtung | |
| EP3281721B1 (fr) | Procédé de fixation d'au moins deux composants au moyen d'un dispositif de rivetage auto-poinconnant et dispositif de fabrication | |
| DE102018111496B4 (de) | Verfahren zum Rührreibschweißen | |
| EP3552729B1 (fr) | Dispositif d'installation de rivets auto-poinçonneurs | |
| DE102017220816A1 (de) | Fügevorrichtung und verfahren zum fügen mindestens eines bauteils unter verwendung einer x-zange | |
| EP3546084B1 (fr) | Procédé de liaison d'au moins deux composants au moyen d'un dispositif de rivetage et dispositif de rivetage | |
| EP3552730B1 (fr) | Dispositif rivet auto-poinçonneur | |
| EP3381581B1 (fr) | Dispositif de poinçonnage et procédé de fonctionnement d'un dispositif de poinçonnage | |
| DE102017205659A1 (de) | Stanznietvorrichtung zum setzen eines stanzniets mit einer eine stempelkraft unterstützenden schwingung und verfahren zum stanznieten mit einer solchen stanznietvorrichtung | |
| EP3552731B1 (fr) | Unité de pose pour un dispositif rivet auto-poinçonneur et dispositif rivet auto-poinçonneur | |
| DE102018205621A1 (de) | Stanznietvorrichtung mit Zuführeinheit für Niete | |
| DE19819721A1 (de) | Vorrichtung zum mechanischen Fügen von aufeinanderliegenden Fügeteilen | |
| DE102018222841A1 (de) | Setzeinheit für eine Stanznietvorrichtung, Stanznietvorrichtung und Verfahren zum Verbinden von Bauteilen | |
| DE102018203720A1 (de) | Stanznietvorrichtung | |
| DE102017209020A1 (de) | Fügevorrichtung und Verfahren zum Betreiben einer Fügevorrichtung | |
| DE102017213233A1 (de) | Stanznietvorrichtung und Verfahren zum Verbinden von Bauteilen | |
| DE102017220335A1 (de) | Stanznietvorrichtung und verfahren zum setzen eines stanzniets mit einer eine stempelkraft unterstützenden schwingung | |
| DE102019200015A1 (de) | Setzeinheiten für eine Stanznietvorrichtung und Stanznietvorrichtung | |
| DE102017209264A1 (de) | Stanznietvorrichtung mit Schwingungserzeuger und Beschleunigungssensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: ROBERT BOSCH GMBH |
|
| 17P | Request for examination filed |
Effective date: 20200416 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B21J 15/16 20060101ALI20200914BHEP Ipc: B21J 15/12 20060101ALI20200914BHEP Ipc: B21J 15/24 20060101ALI20200914BHEP Ipc: B21J 15/02 20060101AFI20200914BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20201019 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1357877 Country of ref document: AT Kind code of ref document: T Effective date: 20210215 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502019000750 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20210127 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210527 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210427 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210427 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210428 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210527 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502019000750 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210331 |
|
| 26N | No opposition filed |
Effective date: 20211028 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210305 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210305 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210327 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210527 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210331 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220331 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210127 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20190305 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20230305 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230305 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230305 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240527 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |