EP3439937B1 - Systeme de deplacement pour deplacer des vehicules d'une installation de transport aerien par cable tracteur et procédé correspondant - Google Patents
Systeme de deplacement pour deplacer des vehicules d'une installation de transport aerien par cable tracteur et procédé correspondant Download PDFInfo
- Publication number
- EP3439937B1 EP3439937B1 EP17724853.1A EP17724853A EP3439937B1 EP 3439937 B1 EP3439937 B1 EP 3439937B1 EP 17724853 A EP17724853 A EP 17724853A EP 3439937 B1 EP3439937 B1 EP 3439937B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- slow
- belt
- drive
- vehicle
- along
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title description 3
- 238000006073 displacement reaction Methods 0.000 claims description 55
- 230000001133 acceleration Effects 0.000 claims description 33
- 230000008878 coupling Effects 0.000 claims description 27
- 238000010168 coupling process Methods 0.000 claims description 27
- 238000005859 coupling reaction Methods 0.000 claims description 27
- 238000011549 displacement method Methods 0.000 claims 2
- 238000009434 installation Methods 0.000 description 26
- 238000010586 diagram Methods 0.000 description 12
- 230000007423 decrease Effects 0.000 description 4
- 230000000979 retarding effect Effects 0.000 description 4
- 229940082150 encore Drugs 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61B—RAILWAY SYSTEMS; EQUIPMENT THEREFOR NOT OTHERWISE PROVIDED FOR
- B61B12/00—Component parts, details or accessories not provided for in groups B61B7/00 - B61B11/00
- B61B12/10—Cable traction drives
- B61B12/105—Acceleration devices or deceleration devices other than braking devices
Definitions
- the present invention relates to a movement system for moving vehicles of an aerial transport installation by towing cable when the vehicles are disengaged from the towing cable.
- Each travel system has a retarding device configured to slow down vehicles disengaged from the towing cable to allow passengers to board or alight from vehicles, and an accelerator configured to accelerate previously slowed vehicles so that they can be reconnected to the towing cable.
- the slowing and acceleration devices are each provided with a plurality of tires configured to cooperate with the coupling devices of the vehicles so as to respectively slow down and accelerate the latter.
- a major drawback of such slowing and acceleration devices lies in the fact that the pressure of the tires must be checked regularly for safety reasons, which leads to high maintenance costs. In addition, such tires show rapid wear and must therefore be replaced frequently, which further increases the costs of the air transport installation.
- DE-OS-1 505 985 a displacement system having a slowing device comprising, instead of tires, two slowing belts each driven at constant speed.
- the present invention aims to remedy these drawbacks.
- the technical problem underlying the invention therefore consists in providing a movement system for an air transport installation which is simple and economical in structure, while making it possible to ensure a high capacity for the air transport installation.
- Such a configuration of the slowing device allows two vehicles to be slowed down simultaneously along the slowing path, namely a first vehicle along the first part of the slowing path via the first slowing belt and a second vehicle along the second part of the deceleration path via the second deceleration belt.
- the movement system according to the invention makes it possible to significantly increase the capacity of the air transport installation.
- the displacement system may further exhibit one or more of the following characteristics, taken alone or in combination.
- the second slowing belt is arranged in the extension of the first slowing belt.
- the first and second slowing belts are arranged so as to allow a transfer of a vehicle from the first slowing belt to the second slowing belt.
- the first and second deceleration belts extend in the same direction of extension.
- the first and second deceleration belts extend substantially parallel.
- the deceleration trajectory is rectilinear.
- the slowing device comprises a first drive pulley and a first driven pulley configured to support the first deceleration belt, and a second drive pulley and a second driven pulley configured to support the second deceleration belt, the first drive motor being rotatably coupled to the first drive pulley, the second drive motor being rotatably coupled to the second drive pulley.
- the first and second deceleration belts respectively comprise a first notched drive surface and a second notched drive surface, the first and second notched drive surfaces being configured to cooperate with the vehicles to slow down.
- the displacement system comprises a control device configured to control the first and second drive devices, and more particularly the first and second drive motors.
- control device is configured to control the first and second drive devices, and more particularly the first and second drive motors, depending on the position of a vehicle along the deceleration path.
- control device is configured to communicate wirelessly with the first and second training devices, for example by Wifi or Bluetooth.
- control device comprises for example an electronic card integrating a microprocessor, and can for example be a central unit of a PC.
- the control device comprises a single control unit configured to control the first and second drive devices, and more particularly the first and second drive motors.
- the control device comprises a first control unit configured to control the first drive device, and a second control unit configured to control the second drive device, the first and second control units being configured to communicate with each other.
- control device is configured to control the first and second drive devices, and more particularly the first and second drive motors, such that when a vehicle is transferred from the first deceleration belt to the second deceleration belt, the first and second travel speeds are substantially identical.
- control device is configured to control the first and second drive devices, and more particularly the first and second drive motors, such that when a vehicle is transferred from the first deceleration belt to the second deceleration belt, the first and second displacement speeds are between 2.5 and 3.5 ms -1 , and for example equal to approximately 2 ms -1 .
- control device is configured to control the first drive device, and more particularly the first drive motor, such that the first displacement speed gradually decreases during a movement of a vehicle along the first part of the travel path.
- control device is configured to control the second drive device, and more particularly the second drive motor, so that the second travel speed gradually decreases during a movement of a vehicle along the second part of the travel path.
- control device is configured to control the first drive device, and more particularly the first drive motor, so that the first displacement speed varies between a first primary value and a second primary value less than the first primary value, during a movement of a vehicle along the first part of the travel path
- controller is further configured to control the second drive device , and more particularly the second drive motor, such that the second displacement speed varies between a first secondary value less than or equal to the first primary value and a second secondary value less than the first secondary value, during a moving a vehicle along the second part of the travel path.
- the control device is configured to control the first drive device, and more particularly the first drive motor, such that the first displacement speed varies between a first value between 5 and 7 ms -1 , and for example about 6 ms -1 , and a second value between 2.5 and 3.5 ms -1 , and for example about 3 ms -1 , during a movement of a vehicle along the first part of the travel path.
- control device is configured to control the second drive device, and more particularly the second drive motor, such that the second displacement speed varies between a first value between 2 and 4 ms -1 , and for example about 3 ms -1 , and a second value between 0 and 1.5 ms -1 , and for example about 1 ms -1 , during a movement of a vehicle along the second part of the travel path.
- control device is configured to control the second drive device, and more particularly the second drive motors, such that when a vehicle reaches an end zone of the second part of the deceleration path opposite to the first part of the deceleration path, the second movement speed is between 0 and 1.5 ms -1 .
- control device is configured to control the first drive device, and more particularly the first drive motor, such that when a vehicle is transferred from the towing cable to the first deceleration belt, the first travel speed is substantially identical to the travel speed of the towing cable.
- the speed of movement of the towing cable is between 6 and 8 ms -1 .
- the displacement system comprises a guide element extending along the first and second deceleration belts, the guide element being configured to guide the vehicles slowed down by the first and second belts. of deceleration along the deceleration path.
- the guide element comprises a guide part which is substantially rectilinear and which extends along the first and second deceleration belts.
- the guide part extends below the first and second deceleration belts.
- the slowing device comprises a first set of tensioning devices configured to tension the first slowing belt, and for example a part of the first slowing belt, and a second set of tensioning devices configured to tension the second deceleration belt, and for example a part of the second deceleration belt.
- each tensioning device is disposed at least in part between the two strands of one respective one of the first and second slowing belts.
- each tensioning device is configured to exert a force on an interior surface of a strand of one respective one of the first and second slowing belts, and more particularly on the interior surface. of the strand of one respective one of the first and second deceleration belts which is intended to cooperate with a vehicle.
- the tensioning devices of the first assembly are distributed, for example regularly distributed, along the first deceleration belt, and the tensioning devices of the second set are distributed, for example regularly distributed, along the second slowing belt.
- each tensioning device comprises a tensioning roller configured to cooperate with an interior surface of one of the first and second slowing belts, respectively.
- Each tensioning roller is preferably mounted so as to be able to rotate about a substantially horizontal axis of rotation.
- each tensioning device comprises a support element mounted to pivot about a substantially horizontal pivot axis, each respective tensioning roller being mounted to rotate freely on the control element. respective support.
- each tensioning device comprises a biasing element configured to bias the respective support element towards a tensioning position in which the respective tensioning roller exerts a force on the inner surface of a respective one of the first and second deceleration belts.
- Each biasing element can for example be a drive motor, a torsion spring or any other suitable element.
- the coupling device of each vehicle comprises a drive element, for example a drive shoe or cross member, configured to cooperate with the first and second deceleration belts of the displacement system. .
- the tensioning devices of the first assembly are configured to press the first deceleration belt on the drive element of a vehicle when slowing down said vehicle along the first part. of the deceleration path, and the tensioning devices of the second set are configured to press the second deceleration belt on the drive member of a vehicle when slowing down said vehicle along the second part of the path slowdown.
- each drive element comprises a plurality of notches configured to cooperate with notches of the first and second notched drive surfaces.
- the drive elements and the first and second notched drive surfaces are configured such that the space between two adjacent notches of a drive element is suitable for receiving two Adjacent notches of each of the first and second notched drive surfaces.
- each drive element is configured such that, when the respective vehicle is transferred from the first retardation belt to the second retardation belt, said drive element respectively cooperates with the first and second deceleration belts.
- each drive element extends substantially parallel to the direction of extension of the first and second deceleration belts, when the respective vehicle is driven by the first and second deceleration belts.
- the first and second deceleration belts are spaced from each other by a predetermined distance.
- the drive element is elongated, and has a length greater than the predetermined distance separating the first and second deceleration belts.
- each coupling device comprises at least one running roller, the guide element being configured to guide the at least one running roller of a coupling device during slowing down the respective vehicle along the slowing path.
- each coupling device comprises a first clamping jaw and a second clamping jaw movably mounted relative to the first clamping jaw between a clamping position in which the first and second clamping jaws are configured to grip the pulling cable and a release position in which the first and second clamping jaws are configured to release the pulling cable.
- each coupling device comprises an actuation lever configured to actuate a movement of the second gripping jaw between the tightening and release positions, the actuating lever being mounted movably between a a first position in which the respective second clamping jaw is in the clamping position, and a second in which the respective second clamping jaw is in the release position.
- the displacement system comprises at least one release rail extending along the first part of the deceleration path, the release rail being configured to cooperate with a release element / clutch mounted on the actuating lever of the respective coupling device so as to cause a movement of said actuating lever to the second position.
- the displacement system comprises at least one clutch rail extending along the second part of the acceleration path, the clutch rail being configured to cooperate with the disengaging / clutching member mounted on the actuating lever of the respective coupling device so as to cause movement of said actuating lever to the first position.
- the figures 1 to 11 represent an aerial transport installation 2 by towing cable.
- the air transport installation 2 comprises in particular stations 3, for example two in number, a tractor cable 4, in a closed loop and defining an outward and a return path, and a plurality of vehicles 5, such as cable cars or chairlifts, arranged to be coupled to the towing cable 4 so as to be moved by the latter between the stations 3 and along the outward and return tracks.
- the towing cable 4 can be, advantageously, a carrier-towing cable, that is to say a carrier cable arranged to support the vehicles 5 during their movements between the stations 3.
- each vehicle 5 comprises in particular a coupling device 6, also called a coupling clamp, intended to couple the respective vehicle 5 to the towing cable 4.
- Each coupling device 6 comprises a support body 7 connected to a hanger 8 supporting the respective vehicle 5.
- Each coupling device 6 also comprises a first clamping jaw 9 fixedly mounted by relative to the respective support body 7, and a clamping element 11 comprising a second clamping jaw 12, the clamping element 11 being hingedly mounted on the respective support body 7 between a clamping position (shown in figure figure 10 ) in which the respective first and second clamping jaws 9, 12 are configured to grip the pulling cable 4 so that the respective vehicle 5 can be moved by the pulling cable 4, and a release position (shown in the figure). figure 7 ) in which the respective first and second clamping jaws 9, 12 are configured to release the traction cable 4.
- Each clamping element 11 is notably moved into the release position at the entrance of a station 3 in order to ensure a disengagement of the respective vehicle 5, and therefore a disconnection of the respective vehicle 5 from the towing cable 4.
- Each coupling device 6 also includes an actuating lever 13 configured to actuate movement of the respective clamp member 11 between the clamping and release positions.
- the actuating lever 13 of each coupling device 6 is hingedly mounted on the respective support body 7 between a first position (shown in figure 10 ) in which the respective clamping element 11 is in the clamping position, and a second position (shown in figure 7 ) in which the respective clamping element 11 is in the release position.
- Each coupling device 6 also comprises a clutch release / clutch roller 14 mounted movably in rotation on the respective actuating lever 13, and the operation of which will be explained below.
- Each coupling device 6 also comprises rolling rollers 15 mounted to be movable in rotation on the respective support body 7, and a drive element 16, for example a drive shoe or cross member, comprising a plurality of notches 17.
- a drive element 16 for example a drive shoe or cross member, comprising a plurality of notches 17.
- the air transport installation 2 further comprises movement systems 18 each arranged in a respective station 3.
- Each movement system 18 is more particularly configured to move vehicles 5, disengaged from the tractor cable 4, in the respective station 3.
- each travel system 18 comprises a slowing device 19 configured to slow down, along a slowing path TR, vehicles 5 disengaged from the towing cable 4, so that passengers can get on or off slowed down vehicles in an embarkation / disembarkation area located in the respective station 3 and downstream of the respective slowing device 19.
- the deceleration trajectory TR is advantageously rectilinear.
- Each slowing device 19 more particularly comprises a first slowing belt 21 configured to cooperate with and slow down a vehicle 5 along a first part TR1 of the slowing path TR, and a second slowing belt 22 configured to cooperate with and slowing down a vehicle 5 along a second part TR2 of the deceleration path TR.
- the second deceleration belt 22 is arranged in the extension of the first deceleration belt 21, such that the first and second deceleration belts 21, 22 extend substantially in the same direction of extension.
- the first and second deceleration belts 21, 22 are advantageously arranged so as to allow a transfer of a vehicle 5 from the first deceleration belt 21 to the second deceleration belt 22.
- the first and second deceleration belts 21, 22 respectively comprise a notched external drive surface 23 and a notched external drive surface 24.
- Each of the notched drive surfaces 23, 24 is configured to cooperate with the notches 17 d a drive element 16 provided on a coupling device 16 of a vehicle 5 so as to be able to slow the latter.
- the drive elements 16 and the notched outer drive surfaces 23, 24 are configured such that the space between two adjacent notches 17 of a drive element 16 is able on the one hand to receive two adjacent notches of the notched external drive surface 23 when slowing down a vehicle 5 along the first part TR1 of the deceleration path TR, and on the other hand to receive two notches adjacent to the notched outer drive surface 24 when decelerating a vehicle 5 along the second portion TR2 of the deceleration path TR.
- each drive member 16 is configured such that when the respective vehicle is transferred from the first deceleration belt 21 to the second deceleration belt 22, said drive member 16 cooperates respectively with the first and second belts slowdown 21, 22.
- each drive element 15 extends substantially parallel to the direction of extension of the first and second belts of deceleration 21, 22, when the respective vehicle 5 is decelerated by the first and second deceleration belts 21, 22.
- each slowing device 19 also includes a first drive pulley 25 and a first driven pulley 26 configured to support the first deceleration belt 21, and a second drive pulley 27 and a second driven pulley 28 configured to support the second Slowing belt 22.
- Each slowing device 19 further comprises a first drive motor 29 rotatably coupled to the first drive pulley 25 and configured to drive the first slowing belt 21 at a first variable displacement speed V1, and a second drive motor 31 rotatably coupled to the second drive pulley 22 and configured to drive the second deceleration belt 22 at a second variable travel speed V2.
- Each travel system 18 further comprises a controller 32 configured to control the respective first and second drive motors 29, 31 according to the position of a vehicle 5 along the respective retardation path TR.
- the control device 32 is configured to communicate wirelessly with the respective first and second drive motors 29, 31, and for example by Wifi or Bluetooth.
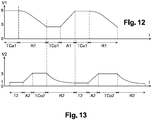
- the figures 12 and 13 represent speed diagrams showing the variations respectively of the first and second variable displacement speeds V1, V2 (in ms -1 ) of a slowing device 19 as a function of time.
- the values indicated on these diagrams are given only by way of example, and could of course vary according in particular to the type of stations (end stations or intermediate stations) and / or the type of vehicles (cable cars or chairlifts).
- each portion R1 of the diagram of the figure 12 corresponds to a phase of slowing down a vehicle 5 along the first part TR1 of the slowing path TR
- the portion TCo1 of the diagram of the figure 12 corresponds to a phase of transfer of a vehicle 5 from the first deceleration belt 21 to the second deceleration belt 22
- the portion A1 of the diagram of the figure 12 corresponds to a phase of increasing the first displacement speed V1 such that the first deceleration belt 21 reaches the displacement speed of the traction cable 4
- each portion TCa1 of the diagram of the figure 12 corresponds to a phase of transfer of a vehicle 5 from the towing cable 4 to the first deceleration belt 21.
- each portion R2 of the diagram of the figure 13 corresponds to a phase of slowing down a vehicle 5 along the second part TR2 of the slowing path TR
- each portion T2 of the diagram of the figure 13 corresponds to a phase of transfer of a vehicle 5 from the second deceleration belt 21 to a downstream zone of the slowdown
- each portion A2 of the diagram of the figure 13 corresponds to a phase of increasing the second displacement speed V2 such that the second deceleration belt 22 reaches a speed substantially identical to the displacement speed of the first deceleration belt 21 at the end of a slowing phase R1 of the latter
- the TCo2 portion of the diagram of the figure 13 corresponds to a phase of transfer of a vehicle 5 from the first deceleration belt 21 to the second deceleration belt 22.
- each slowing device 19 also comprises a first set of tensioning devices 33 configured to tension the first deceleration belt 21, and a second set of tensioning devices 34 configured to tension the second belt. slowdown 22 (see in particular the figure 3 , 8 and 9 ).
- the tensioning devices 33, 34 are more particularly configured to ensure optimum cooperation between the notches of the notched external drive surfaces 23, 24 and the notches 17 of a coupling device 6 when slowing down the respective vehicle 5. along the TR deceleration path.
- the tensioning devices 33 are for example regularly distributed along the first slowing belt 21, and the tensioning devices 34 are for example regularly distributed along the second slowing belt 22.
- each tensioning device 33, 34 comprises a support element 33.1, 34.1 mounted to pivot about a substantially horizontal pivot axis, and a tensioning roller 33.2, 34.2 mounted free to rotate on the respective support element 33.1, 34.1 about a substantially horizontal axis of rotation.
- Each tensioning roller 33.2, 34.2 is configured to cooperate with an inner surface of a respective one of the first and second deceleration belts 21, 22.
- each tensioning roller 33.2 is configured to exert a force on the inner surface of the strand of the first deceleration belt 21 which is intended to cooperate with a vehicle 5 during its deceleration along the first part TR1 of the deceleration path TR
- each tensioning roller 34.2 is configured to exert a force on the inner surface of the strand of the second deceleration belt 22 which is intended to cooperate with a vehicle 5 during its deceleration along the second part TR2 of the deceleration path TR.
- each tensioning device 33, 34 further comprises a biasing element 33.3, 34.3 configured to bias the respective support element 33.2, 34.2 towards a tensioning position in which the tensioning roller 33.1 , 34.1 respectively exerts a force on the inner surface of a respective one of the first and second deceleration belts 21, 22.
- Each biasing element 33.3, 34.3 can for example be a drive motor, a torsion spring or any other appropriate item.
- Each movement system 18 also includes a guide rail 35 extending along the respective first and second deceleration belts 21, 22.
- Each guide rail 35 is configured to support and guide the rollers 15 provided on the coupling device 6 of a vehicle 5 during a deceleration of this vehicle 5 along the deceleration path TR.
- each guide rail 35 comprises a guide part which is substantially rectilinear and which extends below and along the first and second deceleration belts 21, 22.
- each displacement system 18 further comprises an acceleration device 36 configured to accelerate, along an acceleration trajectory TA, vehicles 5 disengaged from the tractor cable 4 and previously slowed down by the respective slowing device 19, from such that the vehicles 5 can be coupled again to the traction cable 4.
- Each acceleration device 36 comprises a first acceleration belt 37 configured to cooperate with and accelerate a vehicle 5 along a first part TA1 of the trajectory acceleration TA, and a second acceleration belt 38 configured to cooperate with and accelerate a vehicle 5 along a second portion TA2 of the acceleration path TA.
- the acceleration trajectory TA is advantageously rectilinear.
- Each acceleration device 36 further includes a drive motor 39 configured to drive the first accelerator belt 37 at a third variable travel speed, and a drive motor 41 configured to drive the second accelerator belt 38. at a fourth variable travel speed.
- Each acceleration device 36 also includes a controller 42 configured to control the respective drive motors 39, 41 according to the position of a vehicle 5 along the respective acceleration path TA.
- acceleration device 36 is not described in detail since the latter is similar to the deceleration device 19. respective, apart from the fact that it accelerates the vehicles 5 for their connection to the towing cable 4.
- Each movement system 18 further comprises a release rail (not shown in the figures) extending along the first part TR1 of the deceleration path TR.
- Each release rail is configured to cooperate with the release / clutch element 14 of the coupling device 6 of a vehicle 5 so as to cause a displacement of the respective actuating lever 13 towards the second position, and therefore a displacement respective first and second clamping jaws in their release position, in order to allow this vehicle 5 to be released from the towing cable 4.
- Each movement system 18 also comprises a clutch rail (not shown in the figures) extending along the second part TA2 of the acceleration path TA.
- Each clutch rail is configured to cooperate with the disengagement / clutch element 14 of the coupling device 6 of a vehicle 5 so as to cause a movement of the respective actuating lever 13 towards the first position, and therefore a movement. displacement of the respective first and second clamping jaws towards their clamping position, in order to allow coupling of this vehicle 5 to the towing cable 4.
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Devices For Conveying Motion By Means Of Endless Flexible Members (AREA)
- Control And Safety Of Cranes (AREA)
Description
- La présente invention concerne un système de déplacement pour déplacer des véhicules d'une installation de transport aérien par câble tracteur lorsque les véhicules sont débrayés du câble tracteur.
- Une installation de transport aérien par câble tracteur comporte de façon connue :
- deux stations d'extrémité, et éventuellement des stations intermédiaires disposées entre les deux stations d'extrémité,
- un câble tracteur en boucle fermée et définissant une voie aller et une voie retour,
- des véhicules agencés pour être accouplés au câble tracteur, par l'intermédiaire de dispositifs d'accouplement débrayables, de manière à être déplacés par le câble tracteur entre les stations d'extrémité et le long des voies aller et retour, et
- deux systèmes de déplacement disposés chacun dans une station d'extrémité respective, chaque système de déplacement étant configuré pour déplacer les véhicules dans la station d'extrémité respective lorsque ces véhicules sont débrayés du câble tracteur.
- Chaque système de déplacement comporte un dispositif de ralentissement configuré pour ralentir les véhicules débrayés du câble tracteur afin de permettre à des passagers de monter dans ou de descendre depuis les véhicules, et un dispositif d'accélération configuré pour accélérer les véhicules préalablement ralentis afin qu'ils puissent être accouplés de nouveau au câble tracteur.
- Les dispositifs de ralentissement et d'accélération sont chacun pourvus d'une pluralité de pneumatiques configurés pour coopérer avec les dispositifs d'accouplement des véhicules de manière à respectivement ralentir et accélérer ces derniers. Un inconvénient majeur de tels dispositifs de ralentissement et d'accélération réside dans le fait que la pression des pneumatiques doit être contrôlée régulièrement pour des raisons de sécurité, ce qui induit des coûts de maintenance élevés. De plus, de tels pneumatiques présentent une usure rapide et doivent donc être fréquemment remplacés, ce qui augmente encore les coûts de l'installation de transport aérien.
- On connaît également de
DE-OS-1 505 985 - La présente invention vise à remédier à ces inconvénients.
- Le problème technique à la base de l'invention consiste donc à fournir un système de déplacement pour une installation de transport aérien qui soit de structure simple et économique, tout en permettant d'assurer une capacité élevée à l'installation de transport aérien.
- A cet effet, la présente invention concerne un système de déplacement pour déplacer des véhicules d'une installation de transport aérien par câble tracteur lorsque les véhicules sont débrayés du câble tracteur, le système de déplacement comprenant :
- un dispositif de ralentissement destiné à être disposé dans une station de l'installation de transport aérien et configuré pour ralentir des véhicules débrayés du câble tracteur le long d'une trajectoire de ralentissement, le dispositif de ralentissement comportant au moins une première courroie de ralentissement et une deuxième courroie de ralentissement, la première courroie de ralentissement étant configurée pour coopérer avec et ralentir un véhicule le long d'une première partie de la trajectoire de ralentissement, la deuxième courroie de ralentissement étant configurée pour coopérer avec et ralentir un véhicule le long d'une deuxième partie de la trajectoire de ralentissement,
- un premier dispositif d'entraînement comportant un premier moteur d'entraînement configuré pour entraîner la première courroie de ralentissement à une première vitesse de déplacement variable, et
- un deuxième dispositif d'entraînement comportant un deuxième moteur d'entraînement configuré pour entraîner la deuxième courroie de ralentissement à une deuxième vitesse de déplacement variable.
- Une telle configuration du dispositif de ralentissement permet de ralentir simultanément deux véhicules le long de la trajectoire de ralentissement, à savoir un premier véhicule le long de la première partie de la trajectoire de ralentissement par l'intermédiaire de la première courroie de ralentissement et un deuxième véhicule le long de la deuxième partie de la trajectoire de ralentissement par l'intermédiaire de la deuxième courroie de ralentissement. Ainsi, le système de déplacement selon l'invention permet d'augmenter de manière significative la capacité de l'installation de transport aérien.
- De plus, l'utilisation d'une paire de courroies de ralentissement à la place d'une série de pneumatiques de ralentissement permet de limiter grandement l'usure du dispositif de ralentissement, ainsi que les interventions de personnels sur site pour vérifier la pression des pneumatiques de ralentissement.
- Le système de déplacement peut en outre présenter une ou plusieurs des caractéristiques suivantes, prises seules ou en combinaison.
- Selon un mode de réalisation de l'invention, la deuxième courroie de ralentissement est disposée dans le prolongement de la première courroie de ralentissement.
- Selon un mode de réalisation de l'invention, les première et deuxième courroies de ralentissement sont agencées de manière à permettre un transfert d'un véhicule de la première courroie de ralentissement à la deuxième courroie de ralentissement.
- Selon un mode de réalisation de l'invention, les première et deuxième courroies de ralentissement s'étendent selon une même direction d'extension.
- Selon un mode de réalisation de l'invention, les première et deuxième courroies de ralentissement s'étendent sensiblement parallèlement.
- Selon un mode de réalisation de l'invention, la trajectoire de ralentissement est rectiligne.
- Selon un mode de réalisation de l'invention, le dispositif de ralentissement comporte une première poulie d'entraînement et une première poulie entraînée configurées pour supporter la première courroie de ralentissement, et une deuxième poulie d'entraînement et une deuxième poulie entraînée configurées pour supporter la deuxième courroie de ralentissement, le premier moteur d'entraînement étant couplé en rotation à la première poulie d'entraînement, le deuxième moteur d'entraînement étant couplé en rotation à la deuxième poulie d'entraînement.
- Selon un mode de réalisation de l'invention, les première et deuxième courroies de ralentissement comportent respectivement une première surface d'entraînement crantée et une deuxième surface d'entraînement crantée, les première et deuxième surfaces d'entraînement crantées étant configurées pour coopérer avec les véhicules à ralentir. Ces dispositions permettent d'éviter un glissement des courroies de ralentissement par rapport aux véhicules, et donc de connaître précisément la proposition des véhicules dans le système de déplacement.
- Selon un mode de réalisation de l'invention, le système de déplacement comprend un dispositif de commande configuré pour commander les premier et deuxième dispositifs d'entraînement, et plus particulièrement les premier et deuxième moteurs d'entraînement.
- Selon un mode de réalisation de l'invention, le dispositif de commande est configuré pour commander les premier et deuxième dispositifs d'entraînement, et plus particulièrement les premier et deuxième moteurs d'entraînement, en fonction de la position d'un véhicule le long de la trajectoire de ralentissement.
- Selon un mode de réalisation de l'invention, le dispositif de commande est configuré pour communiquer sans fil avec les premier et deuxième dispositifs d'entraînement, par exemple par Wifi ou Bluetooth.
- Selon un mode de réalisation de l'invention, le dispositif de commande comporte par exemple une carte électronique intégrant un microprocesseur, et peut par exemple être une unité centrale d'un PC.
- Selon un mode de réalisation de l'invention, le dispositif de commande comporte une unique unité de commande configurée pour commander les premier et deuxième dispositifs d'entraînement, et plus particulièrement les premier et deuxième moteurs d'entraînement. Selon une variante de réalisation, le dispositif de commande comporte une première unité de commande configurée pour commander le premier dispositif d'entraînement, et une deuxième unité de commande configurée pour commander le deuxième dispositif d'entraînement, les première et deuxième unités de commande étant configurées pour communiquer entre elles.
- Selon un mode de réalisation de l'invention, le dispositif de commande est configuré pour commander les premier et deuxième dispositifs d'entraînement, et plus particulièrement les premier et deuxième moteurs d'entraînement, de telle sorte que, lorsqu'un véhicule est transféré de la première courroie de ralentissement à la deuxième courroie de ralentissement, les première et deuxième vitesses de déplacement sont sensiblement identiques.
- Selon un mode de réalisation de l'invention, le dispositif de commande est configuré pour commander les premier et deuxième dispositifs d'entraînement, et plus particulièrement les premier et deuxième moteurs d'entraînement, de telle sorte que, lorsqu'un véhicule est transféré de la première courroie de ralentissement à la deuxième courroie de ralentissement, les première et deuxième vitesses de déplacement sont comprises entre 2,5 et 3,5 m.s-1, et par exemple égales à environ 2 m.s-1.
- Selon un mode de réalisation de l'invention, le dispositif de commande est configuré pour commander le premier dispositif d'entraînement, et plus particulièrement le premier moteur d'entraînement, de telle sorte la première vitesse de déplacement diminue progressivement au cours d'un déplacement d'un véhicule le long de la première partie de la trajectoire de déplacement.
- Selon un mode de réalisation de l'invention, le dispositif de commande est configuré pour commander le deuxième dispositif d'entraînement, et plus particulièrement le deuxième moteur d'entraînement, de telle sorte la deuxième vitesse de déplacement diminue progressivement au cours d'un déplacement d'un véhicule le long de la deuxième partie de la trajectoire de déplacement.
- Selon un mode de réalisation de l'invention, le dispositif de commande est configuré pour commander le premier dispositif d'entraînement, et plus particulièrement le premier moteur d'entraînement, de telle sorte la première vitesse de déplacement varie entre une première valeur primaire et une deuxième valeur primaire inférieure à la première valeur primaire, au cours d'un déplacement d'un véhicule le long de la première partie de la trajectoire de déplacement, et le dispositif de commande est en outre configuré pour commander le deuxième dispositif d'entraînement, et plus particulièrement le deuxième moteur d'entraînement, de telle sorte la deuxième vitesse de déplacement varie entre une première valeur secondaire inférieure ou égale à la première valeur primaire et une deuxième valeur secondaire inférieure à la première valeur secondaire, au cours d'un déplacement d'un véhicule le long de la deuxième partie de la trajectoire de déplacement.
- Selon un mode de réalisation de l'invention, le dispositif de commande est configuré pour commander le premier dispositif d'entraînement, et plus particulièrement le premier moteur d'entraînement, de telle sorte la première vitesse de déplacement varie entre une première valeur comprise entre 5 et 7 m.s-1, et par exemple d'environ 6 m.s-1, et une deuxième valeur comprise entre 2,5 et 3,5 m.s-1, et par exemple d'environ 3 m.s-1, au cours d'un déplacement d'un véhicule le long de la première partie de la trajectoire de déplacement.
- Selon un mode de réalisation de l'invention, le dispositif de commande est configuré pour commander le deuxième dispositif d'entraînement, et plus particulièrement le deuxième moteur d'entraînement, de telle sorte la deuxième vitesse de déplacement varie entre une première valeur comprise entre 2 et 4 m.s-1, et par exemple d'environ 3 m.s-1, et une deuxième valeur comprise entre 0 et 1,5 m.s-1, et par exemple d'environ 1 m.s-1, au cours d'un déplacement d'un véhicule le long de la deuxième partie de la trajectoire de déplacement.
- Selon un mode de réalisation de l'invention, le dispositif de commande est configuré pour commander le deuxième dispositif d'entraînement, et plus particulièrement le deuxième moteurs d'entraînement, de telle sorte que, lorsqu'un véhicule atteint une zone d'extrémité de la deuxième partie de la trajectoire de ralentissement opposée à la première partie de la trajectoire de ralentissement, la deuxième vitesse de déplacement est comprise entre 0 et 1,5 m.s-1.
- Selon un mode de réalisation de l'invention, le dispositif de commande est configuré pour commander le premier dispositif d'entraînement, et plus particulièrement le premier moteur d'entraînement, de telle sorte que, lorsqu'un véhicule est transféré du câble tracteur à la première courroie de ralentissement, la première vitesse de déplacement est sensiblement identique à la vitesse de déplacement du câble tracteur.
- Selon un mode de réalisation de l'invention, la vitesse de déplacement du câble tracteur est comprise entre 6 et 8 m.s-1.
- Selon un mode de réalisation de l'invention, le système de déplacement comporte un élément de guidage s'étendant le long des première et deuxième courroies de ralentissement, l'élément de guidage étant configuré pour guider les véhicules ralentis par les première et deuxième courroies de ralentissement le long de la trajectoire de ralentissement.
- Selon un mode de réalisation de l'invention, l'élément de guidage comporte une partie de guidage qui est sensiblement rectiligne et qui s'étend le long des première et deuxième courroies de ralentissement.
- Selon un mode de réalisation de l'invention, la partie de guidage s'étend en dessous des première et deuxième courroies de ralentissement.
- Selon un mode de réalisation de l'invention, le dispositif de ralentissement comporte un premier ensemble de dispositifs de mise en tension configurés pour mettre en tension la première courroie de ralentissement, et par exemple un brin de la première courroie de ralentissement, et un deuxième ensemble de dispositifs de mise en tension configurés pour mettre en tension la deuxième courroie de ralentissement, et par exemple un brin de la deuxième courroie de ralentissement.
- Selon un mode de réalisation de l'invention, chaque dispositif de mise en tension est disposé au moins en partie entre les deux brins de l'une respective des première et deuxième courroies de ralentissement.
- Selon un mode de réalisation de l'invention, chaque dispositif de mise en tension est configuré pour exercer un effort sur une surface intérieure d'un brin de l'une respective des première et deuxième courroies de ralentissement, et plus particulièrement sur la surface intérieure du brin de l'une respective des première et deuxième courroies de ralentissement qui est destiné à coopérer avec un véhicule.
- Selon un mode de réalisation de l'invention, les dispositifs de mise en tension du premier ensemble sont répartis, par exemple régulièrement répartis, le long de la première courroie de ralentissement, et les dispositifs de mise en tension du deuxième ensemble sont répartis, par exemple régulièrement répartis, le long de la deuxième courroie de ralentissement.
- Selon un mode de réalisation de l'invention, chaque dispositif de mise en tension comporte un galet de mise en tension configuré pour coopérer avec une surface intérieure de l'une respective des première et deuxième courroies de ralentissement. Chaque galet de mise en tension est de préférence monté mobile en rotation autour d'un axe de rotation sensiblement horizontal.
- Selon un mode de réalisation de l'invention, chaque dispositif de mise en tension comporte un élément de support monté pivotant autour d'un axe de pivotement sensiblement horizontal, chaque galet de mise en tension respectif étant monté libre en rotation sur l'élément de support respectif.
- Selon un mode de réalisation de l'invention, chaque dispositif de mise en tension comporte un élément de sollicitation configuré pour solliciter l'élément de support respectif vers une position de mise en tension dans laquelle le galet de mise en tension respectif exerce un effort sur la surface intérieure de l'une respective des première et deuxième courroies de ralentissement. Chaque élément de sollicitation peut par exemple être un moteur d'entraînement, un ressort de torsion ou tout autre élément approprié.
- Selon un mode de réalisation de l'invention, le système de déplacement comporte en outre :
- un dispositif d'accélération destiné à être disposé dans la station de l'installation de transport aérien et configuré pour accélérer des véhicules débrayés du câble tracteur le long d'une trajectoire d'accélération, le dispositif d'accélération comportant au moins une première courroie d'accélération et une deuxième courroie d'accélération, la première courroie d'accélération étant configurée pour coopérer avec et accélérer un véhicule le long d'une première partie de la trajectoire d'accélération, la deuxième courroie d'accélération étant configurée pour coopérer avec et accélérer un véhicule le long d'une deuxième partie de la trajectoire d'accélération,
- un troisième dispositif d'entraînement configuré pour entraîner la première courroie d'accélération à une troisième vitesse de déplacement variable, et
- un quatrième dispositif d'entraînement configuré pour entraîner la deuxième courroie d'accélération à une quatrième vitesse de déplacement variable.
- La présente invention concerne en outre une installation de transport aérien par câble tracteur, comportant :
- un câble tracteur,
- une pluralité de véhicules comprenant chacun un dispositif d'accouplement destiné à être accouplé au câble tracteur, et
- un système de déplacement selon l'invention.
- Selon un mode de réalisation de l'invention, le dispositif d'accouplement de chaque véhicule comporte un élément d'entraînement, par exemple un patin ou traverse d'entraînement, configuré pour coopérer avec les première et deuxième courroies de ralentissement du système de déplacement.
- Selon un mode de réalisation de l'invention, les dispositifs de mise en tension du premier ensemble sont configurés pour appuyer la première courroie de ralentissement sur l'élément d'entraînement d'un véhicule lors du ralentissement dudit véhicule le long de la première partie de la trajectoire de ralentissement, et les dispositifs de mise en tension du deuxième ensemble sont configurés pour appuyer la deuxième courroie de ralentissement sur l'élément d'entraînement d'un véhicule lors du ralentissement dudit véhicule le long de la deuxième partie de la trajectoire de ralentissement.
- Selon un mode de réalisation de l'invention, chaque élément d'entraînement comporte une pluralité de crans configurés pour coopérer avec des crans des première et deuxième surfaces d'entraînement crantées.
- Selon un mode de réalisation de l'invention, les éléments d'entraînement et les première et deuxième surfaces d'entraînement crantées sont configurés de telle sorte que l'espace entre deux crans adjacents d'un élément d'entraînement est apte à recevoir deux crans adjacents de chacune des première et deuxième surfaces d'entraînement crantées.
- Selon un mode de réalisation de l'invention, chaque élément d'entraînement est configuré de telle sorte que, lorsque le véhicule respectif est transféré de la première courroie de ralentissement à la deuxième courroie de ralentissement, ledit élément d'entraînement coopère respectivement avec les première et deuxième courroies de ralentissement.
- Selon un mode de réalisation de l'invention, chaque élément d'entraînement s'étend sensiblement parallèlement à la direction d'extension des première et deuxième courroies de ralentissement, lorsque le véhicule respectif est entraîné par les première et deuxième courroies de ralentissement.
- Selon un mode de réalisation de l'invention, les première et deuxième courroies de ralentissement sont espacées l'une de l'autre d'une distance prédéterminée.
- Selon un mode de réalisation de l'invention, l'élément d'entraînement est allongé, et présente une longueur supérieure à la distance prédéterminée séparant les première et deuxième courroies de ralentissement.
- Selon un mode de réalisation de l'invention, chaque dispositif d'accouplement comporte au moins un galet de roulement, l'élément de guidage étant configuré pour guider l'au moins un galet de roulement d'un dispositif d'accouplement lors d'un ralentissement du véhicule respectif le long de la trajectoire de ralentissement.
- Selon un mode de réalisation de l'invention, chaque dispositif d'accouplement comporte un premier mors de serrage et un deuxième mors de serrage monté mobile par rapport au premier mors de serrage entre une position de serrage dans laquelle les premier et deuxième mors de serrage sont configurés pour enserrer le câble tracteur et une position de libération dans laquelle les premier et deuxième mors de serrage sont configurés pour libérer le câble tracteur.
- Selon un mode de réalisation de l'invention, chaque dispositif d'accouplement comporte un levier d'actionnement configuré pour actionner un déplacement du deuxième mors de serrage entre les positions de serrage et de libération, le levier d'actionnement étant monté mobile entre une première position dans laquelle le deuxième mors de serrage respectif est dans la position de serrage, et une deuxième dans laquelle le deuxième mors de serrage de serrage respectif est dans la position de libération.
- Selon un mode de réalisation de l'invention, le système de déplacement comprend au moins un rail de débrayage s'étendant le long de la première partie de la trajectoire de ralentissement, le rail de débrayage étant configuré pour coopérer avec un élément de débrayage/embrayage monté sur le levier d'actionnement du dispositif d'accouplement respectif de manière à entraîner un déplacement dudit levier d'actionnement vers la deuxième position.
- Selon un mode de réalisation de l'invention, le système de déplacement comprend au moins un rail d'embrayage s'étendant le long de la deuxième partie de la trajectoire d'accélération, le rail d'embrayage étant configuré pour coopérer avec l'élément de débrayage/embrayage monté sur le levier d'actionnement du dispositif d'accouplement respectif de manière à entraîner un déplacement dudit levier d'actionnement vers la première position.
- La présente invention concerne en outre un procédé de déplacement pour déplacer des véhicules d'une installation de transport aérien par câble tracteur lorsque les véhicules sont débrayés du câble tracteur, le procédé de déplacement comprenant les étapes suivantes :
- prévoir un dispositif de ralentissement disposé dans une station de l'installation de transport aérien et configuré pour ralentir des véhicules débrayés du câble tracteur le long d'une trajectoire de ralentissement, le dispositif de ralentissement comportant au moins une première courroie de ralentissement et une deuxième courroie de ralentissement, la première courroie de ralentissement étant configurée pour coopérer avec et ralentir un véhicule le long d'une première partie de la trajectoire de ralentissement, la deuxième courroie de ralentissement étant configurée pour coopérer avec et ralentir un véhicule le long d'une deuxième partie de la trajectoire de ralentissement,
- prévoir un premier dispositif d'entraînement comportant un premier moteur d'entraînement configuré pour entraîner la première courroie de ralentissement à une première vitesse de déplacement variable,
- prévoir un deuxième dispositif d'entraînement comportant un deuxième moteur d'entraînement configuré pour entraîner la deuxième courroie de ralentissement à une deuxième vitesse de déplacement variable,
- commander le premier moteur d'entraînement de manière à entraîner la première courroie de ralentissement à la première vitesse de déplacement variable afin de ralentir un véhicule le long de la première partie de la trajectoire de ralentissement, et
- commander le deuxième moteur d'entraînement de manière à entraîner la deuxième courroie de ralentissement à la deuxième vitesse de déplacement variable afin de ralentir un véhicule le long de la deuxième partie de la trajectoire de ralentissement.
- De toute façon l'invention sera bien comprise à l'aide de la description qui suit en référence au dessin schématique annexé représentant, à titre d'exemple non limitatif, une forme d'exécution de ce système de déplacement.
-
Figure 1 est une vue schématique de dessus d'une installation de transport aérien 2 par câble tracteur. -
Figure 2 est une vue schématique de côté d'un dispositif de ralentissement appartenant à l'installation de transport aérien de lafigure 1 . -
Figure 3 est une vue partielle en perspective du dispositif de ralentissement de lafigure 3 . -
Figures 4 et 5 sont des vues en perspective respectivement d'une première et d'une deuxième courroie de ralentissement appartenant au dispositif de ralentissement de lafigure 3 . -
Figure 6 est une vue partielle de dessus du dispositif de ralentissement de lafigure 3 . -
Figure 7 est une vue de côté du dispositif de ralentissement de lafigure 3 . -
Figure 8 est une vue partielle de face du dispositif de ralentissement de lafigure 3 . -
Figure 9 est une vue, à l'échelle agrandie, d'un détail de lafigure 8 . -
Figure 10 est une vue en perspective d'un dispositif d'accouplement prévu sur un véhicule de l'installation de transport aérien de lafigure 1 . -
Figure 11 est une vue schématique de côté d'un dispositif d'accélération appartenant à l'installation de transport aérien de lafigure 1 . -
Figure 12 est un diagramme représentant les variations, en fonction du temps, de la vitesse de déplacement d'une première courroie de ralentissement appartenant au dispositif de ralentissement de lafigure 3 . -
Figure 13 est un diagramme représentant les variations, en fonction du temps, de la vitesse de déplacement d'une deuxième courroie de ralentissement appartenant au dispositif de ralentissement de lafigure 3 . - Les
figures 1 à 11 représentent une installation de transport aérien 2 par câble tracteur. - Comme représenté plus particulièrement sur la
figure 1 , l'installation de transport aérien 2 comprend notamment des stations 3, par exemple au nombre de deux, un câble tracteur 4, en boucle fermée et définissant une voie aller et une voie retour, et une pluralité de véhicules 5, tels que des télécabines ou des télésièges, agencés pour être accouplés au câble tracteur 4 de manière à être déplacés par ce dernier entre les stations 3 et le long des voies aller et retour. Il convient d'être noté que le câble tracteur 4 peut être, de façon avantageuse, un câble porteur-tracteur, c'est-à-dire un câble porteur agencé pour supporter les véhicules 5 lors de leurs déplacements entre les stations 3. - Comme montré plus particulièrement sur les
figures 2 et10 , chaque véhicule 5 comprend notamment un dispositif d'accouplement 6, également nommé pince d'accouplement, destiné à accoupler le véhicule 5 respectif au câble tracteur 4. - Chaque dispositif d'accouplement 6 comprend un corps de support 7 relié à une suspente 8 supportant le véhicule 5 respectif. Chaque dispositif d'accouplement 6 comprend également un premier mors de serrage 9 monté fixe par rapport au corps de support 7 respectif, et un élément de serrage 11 comprenant un deuxième mors de serrage 12, l'élément de serrage 11 étant monté articulé sur le corps de support 7 respectif entre une position de serrage (montrée sur la
figure 10 ) dans laquelle les premier et deuxième mors de serrage 9, 12 respectifs sont configurés pour enserrer le câble tracteur 4 de telle sorte que le véhicule 5 respectif peut être déplacé par le câble tracteur 4, et une position de libération (montrée sur lafigure 7 ) dans laquelle les premier et deuxième mors de serrage 9, 12 respectifs sont configurés pour libérer le câble tracteur 4. Chaque élément de serrage 11 est notamment déplacé dans la position de libération à l'entrée d'une station 3 afin d'assurer un débrayage du véhicule 5 respectif, et donc une déconnexion du véhicule 5 respectif du câble tracteur 4. - Chaque dispositif d'accouplement 6 comprend également un levier d'actionnement 13 configuré pour actionner un déplacement de l'élément de serrage 11 respectif entre les positions de serrage et de libération. Le levier d'actionnement 13 de chaque dispositif d'accouplement 6 est montée articulée sur le corps de support 7 respectif entre une première position (montrée sur la
figure 10 ) dans laquelle l'élément de serrage 11 respectif est dans la position de serrage, et une deuxième position (montrée sur lafigure 7 ) dans laquelle l'élément de serrage 11 respectif est dans la position de libération. Chaque dispositif d'accouplement 6 comprend également un galet de débrayage/embrayage 14 monté mobile en rotation sur le levier d'actionnement 13 respectif, et dont le fonctionnement sera explicité ci-après. - Chaque dispositif d'accouplement 6 comporte également des galets de roulement 15 montés mobiles en rotation sur le corps de support 7 respectif, et un élément d'entraînement 16, par exemple un patin ou traverse d'entraînement, comportant une pluralité de crans 17. Les fonctions des galets de roulement 15 et de l'élément d'entraînement 16 seront également explicitées ci-après.
- L'installation de transport aérien 2 comprend en outre des systèmes de déplacement 18 disposés chacun dans une station 3 respective. Chaque système de déplacement 18 est plus particulièrement configuré pour déplacer des véhicules 5, débrayés du câble tracteur 4, dans la station 3 respective.
- Comme montré notamment sur la
figure 2 , chaque système de déplacement 18 comprend un dispositif de ralentissement 19 configuré pour ralentir, le long d'une trajectoire de ralentissement TR, des véhicules 5 débrayés du câble tracteur 4, de telle sorte que des passagers puissent montés dans ou descendre des véhicules ralentis dans une zone d'embarquement/débarquement disposée dans la station 3 respective et en aval du dispositif de ralentissement 19 respectif. Il convient d'être noté que la trajectoire de ralentissement TR est avantageusement rectiligne. - Chaque dispositif de ralentissement 19 comporte plus particulièrement une première courroie de ralentissement 21 configurée pour coopérer avec et ralentir un véhicule 5 le long d'une première partie TR1 de la trajectoire de ralentissement TR, et une deuxième courroie de ralentissement 22 configurée pour coopérer avec et ralentir un véhicule 5 le long d'une deuxième partie TR2 de la trajectoire de ralentissement TR. La deuxième courroie de ralentissement 22 est disposée dans le prolongement de la première courroie de ralentissement 21, de telle sorte que les première et deuxième courroies de ralentissement 21, 22 s'étendent sensiblement selon une même direction d'extension. Les première et deuxième courroies de ralentissement 21, 22 sont avantageusement agencées de manière à permettre un transfert d'un véhicule 5 de la première courroie de ralentissement 21 à la deuxième courroie de ralentissement 22.
- Comme montré plus particulièrement sur les
figures 8 et9 , les première et deuxième courroies de ralentissement 21, 22 comportent respectivement une surface d'entraînement externe crantée 23 et une surface d'entraînement externe crantée 24. Chacune des surfaces d'entraînement crantées 23, 24 est configurée pour coopérer avec les crans 17 d'un élément d'entraînement 16 prévu sur un dispositif d'accouplement 16 d'un véhicule 5 de manière à pouvoir ralentir ce dernier. Selon le mode de réalisation représenté sur les figures, les éléments d'entraînement 16 et les surfaces d'entraînement externes crantées 23, 24 sont configurés de telle sorte que l'espace entre deux crans 17 adjacents d'un élément d'entraînement 16 est apte d'une part à recevoir deux crans adjacents de la surface d'entraînement externe crantée 23 lors du ralentissement d'un véhicule 5 le long de la première partie TR1 de la trajectoire de ralentissement TR, et d'autre part à recevoir deux crans adjacents de la surface d'entraînement externe crantée 24 lors du ralentissement d'un véhicule 5 le long de la deuxième partie TR2 de la trajectoire de ralentissement TR. - Comme cela ressort plus particulièrement de la
figure 8 , chaque élément d'entraînement 16 est configuré de telle sorte que, lorsque le véhicule 5 respectif est transféré de la première courroie de ralentissement 21 à la deuxième courroie de ralentissement 22, ledit élément d'entraînement 16 coopère respectivement avec les première et deuxième courroies de ralentissement 21, 22. De plus, comme montré sur lesfigures 3 et6 , chaque élément d'entraînement 15 s'étend sensiblement parallèlement à la direction d'extension des première et deuxième courroies de ralentissement 21, 22, lorsque le véhicule 5 respectif est ralenti par les première et deuxième courroies de ralentissement 21, 22. - Comme montré sur les
figures 4 et 5 , chaque dispositif de ralentissement 19 comporte également une première poulie d'entraînement 25 et une première poulie entraînée 26 configurées pour supporter la première courroie de ralentissement 21, et une deuxième poulie d'entraînement 27 et une deuxième poulie entraînée 28 configurées pour supporter la deuxième courroie de ralentissement 22. Chaque dispositif de ralentissement 19 comporte en outre un premier moteur d'entraînement 29 couplé en rotation à la première poulie d'entraînement 25 et configuré pour entraîner la première courroie de ralentissement 21 à une première vitesse de déplacement variable V1, et un deuxième moteur d'entraînement 31 couplé en rotation à la deuxième poulie d'entraînement 22 et configuré pour entraîner la deuxième courroie de ralentissement 22 à une deuxième vitesse de déplacement variable V2. - Chaque système de déplacement 18 comprend en outre un dispositif de commande 32 configuré pour commander les premier et deuxième moteurs d'entraînement 29, 31 respectifs en fonction de la position d'un véhicule 5 le long de la trajectoire de ralentissement TR respective. Avantageusement, le dispositif de commande 32 est configuré pour communiquer sans fil avec les premier et deuxième moteurs d'entraînement 29, 31 respectifs, et par exemple par Wifi ou Bluetooth.
- Chaque dispositif de commande 32 peut par exemple être configuré pour commander les premier et deuxième moteurs d'entraînement 29, 31 respectifs de telle sorte que :
- lorsqu'un véhicule 5 encore embrayé sur le câble tracteur 4 est transféré à la première courroie de ralentissement 21, c'est-à-dire entre en contact avec la première courroie de ralentissement 21, la première vitesse de déplacement V1 est sensiblement identique à la vitesse de déplacement du câble tracteur 4, qui peut être comprise entre 5 et 7 m.s-1 et par exemple égale à environ 6 m.s-1, de manière à assurer un transfert sans à coup d'un véhicule 5 du câble tracteur 4 à la première courroie de ralentissement 21 ;
- dès qu'un véhicule 5 transféré à la première courroie de ralentissement 21 est débrayé du câble tracteur 4, la première vitesse de déplacement V1 diminue progressivement jusqu'à une valeur comprise entre 2,5 et 3,5 m.s-1, et par exemple d'environ 3 m.s-1, et ce de manière à ralentir le véhicule 5 le long de la première partie TR1 de la trajectoire de déplacement TR ;
- lors du transfert d'un véhicule 5 de la première courroie de ralentissement 21 à la deuxième courroie de ralentissement 22, c'est-à-dire lorsque le véhicule 5 est simultanément en contact avec les première et deuxième courroies de ralentissement 21, 22, les première et deuxième vitesses de déplacement V1, V2 sont sensiblement identiques et comprises entre 2,5 et 3,5 m.s-1, et par exemple égales à environ 3 m.s-1;
- dès qu'un véhicule 5 est transféré à la deuxième courroie de ralentissement 22, c'est-à-dire lorsqu'il n'est plus en contact avec la première courroie de ralentissement 21, la deuxième vitesse de déplacement V2 diminue progressivement jusqu'à une valeur inférieure à 1,5 m.s-1, et par exemple d'environ 1 m.s-1, et ce de manière à ralentir le véhicule 5 le long de la deuxième partie TR2 de la trajectoire de déplacement TR, afin de permettre à des passagers d'embarquer ou de débarquer du véhicule 5 ralenti.
- Les
figures 12 et 13 représentent des diagrammes de vitesse montrant les variations respectivement des première et deuxième vitesses de déplacement variables V1, V2 (en m.s-1) d'un dispositif de ralentissement 19 en fonction du temps. Les valeurs indiquées sur ces diagrammes sont données uniquement à titre d'exemples, et pourraient bien entendu variées en fonction notamment du type de stations (stations d'extrémité ou stations intermédiaires) et/ou du type de véhicules (télécabines ou télésièges). - Il convient d'être noté que chaque portion R1 du diagramme de la
figure 12 correspond à une phase de ralentissement d'un véhicule 5 le long de la première partie TR1 de la trajectoire de ralentissement TR, que la portion TCo1 du diagramme de lafigure 12 correspond à une phase de transfert d'un véhicule 5 de la première courroie de ralentissement 21 à la deuxième courroie de ralentissement 22, que la portion A1 du diagramme de lafigure 12 correspond à une phase d'augmentation de la première vitesse de déplacement V1 de telle sorte que la première courroie de ralentissement 21 atteigne la vitesse de déplacement du câble tracteur 4, et que chaque portion TCa1 du diagramme de lafigure 12 correspond à une phase de transfert d'un véhicule 5 du câble tracteur 4 à la première courroie de ralentissement 21. - Il convient également d'être noté que chaque portion R2 du diagramme de la
figure 13 correspond à une phase de ralentissement d'un véhicule 5 le long de la deuxième partie TR2 de la trajectoire de ralentissement TR, que chaque portion T2 du diagramme de lafigure 13 correspond à une phase de transfert d'un véhicule 5 de la deuxième courroie de ralentissement 21 à une zone aval du système de ralentissement, que chaque portion A2 du diagramme de lafigure 13 correspond à une phase d'augmentation de la deuxième vitesse de déplacement V2 de telle sorte que la deuxième courroie de ralentissement 22 atteigne une vitesse sensiblement identique à la vitesse de déplacement de la première courroie de ralentissement 21 à la fin d'une phase de ralentissement R1 de cette dernière, et que la portion TCo2 du diagramme de lafigure 13 correspond à une phase de transfert d'un véhicule 5 de la première courroie de ralentissement 21 à la deuxième courroie de ralentissement 22. - Avantageusement, chaque dispositif de ralentissement 19 comporte également un premier ensemble de dispositifs de mise en tension 33 configurés pour mettre en tension la première courroie de ralentissement 21, et un deuxième ensemble de dispositifs de mise en tension 34 configurés pour mettre en tension la deuxième courroie de ralentissement 22 (voir notamment les
figure 3 ,8 et9 ). Les dispositifs de mise en tension 33, 34 sont plus particulièrement configurés pour assurer une coopération optimale entre les crans des surfaces d'entraînement externes crantées 23, 24 et les crans 17 d'un dispositif d'accouplement 6 lors du ralentissement du véhicule 5 respectif le long de la trajectoire de ralentissement TR. Les dispositifs de mise en tension 33 sont par exemple régulièrement répartis le long de la première courroie de ralentissement 21, et les dispositifs de mise en tension 34 sont par exemple régulièrement répartis le long de la deuxième courroie de ralentissement 22. - Selon le mode de réalisation représenté sur les figures, chaque dispositif de mise en tension 33, 34 comporte un élément de support 33.1, 34.1 monté pivotant autour d'un axe de pivotement sensiblement horizontal, et un galet de mise en tension 33.2, 34.2 monté libre en rotation sur l'élément de support 33.1, 34.1 respectif autour d'un axe de rotation sensiblement horizontal. Chaque galet de mise en tension 33.2, 34.2 est configuré pour coopérer avec une surface intérieure de l'une respective des première et deuxième courroies de ralentissement 21, 22. Plus particulièrement, chaque galet de mise en tension 33.2 est configuré pour exercer un effort sur la surface intérieure du brin de la première courroie de ralentissement 21 qui est destiné à coopérer avec un véhicule 5 lors de son ralentissement le long de la première partie TR1 de la trajectoire de ralentissement TR, et chaque galet de mise en tension 34.2 est configuré pour exercer un effort sur la surface intérieure du brin de la deuxième courroie de ralentissement 22 qui est destiné à coopérer avec un véhicule 5 lors de son ralentissement le long de la deuxième partie TR2 de la trajectoire de ralentissement TR.
- De préférence, chaque dispositif de mise en tension 33, 34 comporte en outre un élément de sollicitation 33.3, 34.3 configuré pour solliciter l'élément de support 33.2, 34.2 respectif vers une position de mise en tension dans laquelle le galet de mise en tension 33.1, 34.1 respectif exerce un effort sur la surface intérieure de l'une respective des première et deuxième courroies de ralentissement 21, 22. Chaque élément de sollicitation 33.3, 34.3 peut par exemple être un moteur d'entraînement, un ressort de torsion ou tout autre élément approprié.
- Chaque système de déplacement 18 comporte également un rail de guidage 35 s'étendant le long des première et deuxième courroies de ralentissement 21, 22 respectives. Chaque rail de guidage 35 est configuré pour supporter et guider les galets de roulements 15 prévus sur le dispositif d'accouplement 6 d'un véhicule 5 lors d'un ralentissement de ce véhicule 5 le long de la trajectoire de ralentissement TR. Selon le mode de réalisation représenté sur les figures, chaque rail de guidage 35 comporte une partie de guidage qui est sensiblement rectiligne et qui s'étend en dessous et le long des première et deuxième courroies de ralentissement 21, 22.
- Comme montré sur la
figure 11 , chaque système de déplacement 18 comporte en outre un dispositif d'accélération 36 configuré pour accélérer, le long d'une trajectoire d'accélération TA, des véhicules 5 débrayés du câble tracteur 4 et préalablement ralentis par le dispositif de ralentissement 19 respectif, de telle sorte que les véhicules 5 puissent être accouplés à nouveau au câble tracteur 4. Chaque dispositif d'accélération 36 comporte une première courroie d'accélération 37 configurée pour coopérer avec et accélérer un véhicule 5 le long d'une première partie TA1 de la trajectoire d'accélération TA, et une deuxième courroie d'accélération 38 configurée pour coopérer avec et accélérer un véhicule 5 le long d'une deuxième partie TA2 de la trajectoire d'accélération TA. Il convient d'être noté que la trajectoire d'accélération TA est avantageusement rectiligne. - Chaque dispositif d'accélération 36 comporte en outre un moteur d'entraînement 39 configuré pour entraîner la première courroie d'accélération 37 à une troisième vitesse de déplacement variable, et un moteur d'entraînement 41 configuré pour entraîner la deuxième courroie d'accélération 38 à une quatrième vitesse de déplacement variable. Chaque dispositif d'accélération 36 comporte également un dispositif de commande 42 configuré pour commander les moteurs d'entraînement 39, 41 respectifs en fonction de la position d'un véhicule 5 le long de la trajectoire d'accélération TA respective.
- Il convient d'être noté que le dispositif d'accélération 36 n'est pas décrit de manière détaillé puisque ce dernier est similaire au dispositif de ralentissement 19 respectif, mis à part le fait qu'il accélère les véhicules 5 en vue de leur connexion au câble tracteur 4.
- Chaque système de déplacement 18 comprend en outre un rail de débrayage (non représenté sur les figures) s'étendant le long de la première partie TR1 de la trajectoire de ralentissement TR. Chaque rail de débrayage est configuré pour coopérer avec l'élément de débrayage/embrayage 14 du dispositif d'accouplement 6 d'un véhicule 5 de manière à entraîner un déplacement du levier d'actionnement 13 respectif vers la deuxième position, et donc un déplacement des premier et deuxième mors de serrage respectifs dans leur position de libération, et ce afin de permettre un débrayage de ce véhicule 5 du câble tracteur 4.
- Chaque système de déplacement 18 comprend également un rail d'embrayage (non représenté sur les figures) s'étendant le long de la deuxième partie TA2 de la trajectoire d'accélération TA. Chaque rail d'embrayage est configuré pour coopérer avec l'élément de débrayage/embrayage 14 du dispositif d'accouplement 6 d'un véhicule 5 de manière à entraîner un déplacement du levier d'actionnement 13 respectif vers la première position, et donc un déplacement des premier et deuxième mors de serrage respectifs vers leur position de serrage, et ce afin de permettre un accouplement de ce véhicule 5 au câble tracteur 4.
- Comme il va de soi, l'invention ne se limite pas à la seule forme d'exécution de ce système de déplacement, décrite ci-dessus à titre d'exemple, elle en embrasse au contraire toutes les variantes de réalisation, pourvu qu'elles soient couvertes par les revendications ci-jointes.
Claims (12)
- Système de déplacement (18) pour déplacer des véhicules (5) d'une installation de transport aérien (2) par câble tracteur lorsque les véhicules (5) sont débrayés du câble tracteur (4), le système de déplacement (18) comprenant :- un dispositif de ralentissement (19) destiné à être disposé dans une station (3) de l'installation de transport aérien (2) et configuré pour ralentir des véhicules (5) débrayés du câble tracteur (4) le long d'une trajectoire de ralentissement (TR), le dispositif de ralentissement (19) comportant au moins une première courroie de ralentissement (21) et une deuxième courroie de ralentissement (22), la première courroie de ralentissement (21) étant configurée pour coopérer avec et ralentir un véhicule (5) le long d'une première partie (TR1) de la trajectoire de ralentissement (TR), la deuxième courroie de ralentissement (22) étant configurée pour coopérer avec et ralentir un véhicule (5) le long d'une deuxième partie (TR2) de la trajectoire de ralentissement (TR),- un premier dispositif d'entraînement (29) comportant un premier moteur d'entraînement (29) configuré pour entraîner la première courroie de ralentissement (21) à une première vitesse de déplacement variable (V1), et- un deuxième dispositif d'entraînement (31) comportant un deuxième moteur d'entraînement (31) configuré pour entraîner la deuxième courroie de ralentissement (22) à une deuxième vitesse de déplacement variable (V2).
- Système de déplacement (18) selon la revendication 1, dans lequel la deuxième courroie de ralentissement (22) est disposée dans le prolongement de la première courroie de ralentissement (21).
- Système de déplacement selon la revendication 1 ou 2, dans lequel les première et deuxième courroies de ralentissement (21, 22) comportent respectivement une première surface d'entraînement crantée (23) et une deuxième surface d'entraînement crantée (24), les première et deuxième surfaces d'entraînement crantées (23, 24) étant configurées pour coopérer avec les véhicules (5) à ralentir.
- Système de déplacement (18) selon l'une quelconque des revendications 1 à 3, lequel comprend un dispositif de commande (32) configuré pour commander les premier et deuxième dispositifs d'entraînement (29, 31).
- Système de déplacement (18) selon la revendication 4, dans lequel le dispositif de commande (32) est configuré pour commander les premier et deuxième dispositifs d'entraînement (29, 21) de telle sorte que, lorsqu'un véhicule (5) est transféré de la première courroie de ralentissement (21) à la deuxième courroie de ralentissement (22), les première et deuxième vitesses de déplacement (V1, V2) sont sensiblement identiques.
- Système de déplacement (18) selon la revendication 4 ou 5, dans lequel le dispositif de commande (32) est configuré pour commander le premier dispositif d'entraînement (29) de telle sorte que, lorsqu'un véhicule (5) est transféré du câble tracteur (4) à la première courroie de ralentissement (21), la première vitesse de déplacement (V1) est sensiblement identique à la vitesse de déplacement du câble tracteur (4).
- Système de déplacement (18) selon l'une quelconque des revendications 1 à 6, lequel comporte un élément de guidage (35) s'étendant le long des première et deuxième courroies de ralentissement (21, 22), l'élément de guidage (35) étant configuré pour guider les véhicules (5) ralentis par les première et deuxième courroies de ralentissement (21, 22) le long de la trajectoire de ralentissement (TR).
- Système de déplacement (18) selon l'une quelconque des revendications 1 à 7, dans lequel le dispositif de ralentissement (18) comporte un premier ensemble de dispositifs de mise en tension (33) configurés pour mettre en tension la première courroie de ralentissement (21), et un deuxième ensemble de dispositifs de mise en tension (34) configurés pour mettre en tension la deuxième courroie de ralentissement (22).
- Système de déplacement (18) selon l'une quelconque des revendications 1 à 8, lequel comporte en outre :- un dispositif d'accélération (36) destiné à être disposé dans la station de l'installation de transport aérien (2) et configuré pour accélérer des véhicules (5) débrayés du câble tracteur (4) le long d'une trajectoire d'accélération (TA), le dispositif d'accélération (36) comportant au moins une première courroie d'accélération (37) et une deuxième courroie d'accélération (38), la première courroie d'accélération (37) étant configurée pour coopérer avec et accélérer un véhicule (5) le long d'une première partie (TA1) de la trajectoire d'accélération (TA), la deuxième courroie d'accélération (38) étant configurée pour coopérer avec et accélérer un véhicule (5) le long d'une deuxième partie (TA2) de la trajectoire d'accélération (TA),- un troisième dispositif d'entraînement (39) configuré pour entraîner la première courroie d'accélération (37) à une troisième vitesse de déplacement variable, et- un quatrième dispositif d'entraînement (41) configuré pour entraîner la deuxième courroie d'accélération (38) à une quatrième vitesse de déplacement variable.
- Installation de transport aérien (2) par câble tracteur, comportant :- un câble tracteur (4),- une pluralité de véhicules (5) comprenant chacun un dispositif d'accouplement (6) destiné à être accouplé au câble tracteur (4), et- un système de déplacement (18) selon l'une quelconque des revendications 1 à 9.
- Installation de transport aérien (2) selon la revendication 10, dans laquelle le dispositif d'accouplement (6) de chaque véhicule (5) comporte un élément d'entraînement (16) configuré pour coopérer avec les première et deuxième courroies de ralentissement (21, 22) du système de déplacement (18).
- Procédé de déplacement pour déplacer des véhicules (5) d'une installation de transport aérien (2) par câble tracteur lorsque les véhicules (5) sont débrayés du câble tracteur, le procédé de déplacement comprenant les étapes suivantes :- prévoir un dispositif de ralentissement (19) disposé dans une station (3) de l'installation de transport aérien (2) et configuré pour ralentir des véhicules (5) débrayés du câble tracteur (4) le long d'une trajectoire de ralentissement (TR), le dispositif de ralentissement (19) comportant au moins une première courroie de ralentissement (21) et une deuxième courroie de ralentissement (22), la première courroie de ralentissement (21) étant configurée pour coopérer avec et ralentir un véhicule (5) le long d'une première partie (TR1) de la trajectoire de ralentissement (TR), la deuxième courroie de ralentissement (22) étant configurée pour coopérer avec et ralentir un véhicule (5) le long d'une deuxième partie (TR2) de la trajectoire de ralentissement (TR),- prévoir un premier dispositif d'entraînement (29) comportant un premier moteur d'entraînement (29) configuré pour entraîner la première courroie de ralentissement (21) à une première vitesse de déplacement variable (V1),- prévoir un deuxième dispositif d'entraînement (31) comportant un deuxième moteur d'entraînement (31) configuré pour entraîner la deuxième courroie de ralentissement (22) à une deuxième vitesse de déplacement variable (V2),- commander le premier moteur d'entraînement (29) de manière à entraîner la première courroie de ralentissement (21) à la première vitesse de déplacement variable (V1) afin de ralentir un véhicule (5) le long de la première partie (TR1) de la trajectoire de ralentissement (TR), et- commander le deuxième moteur d'entraînement (31) de manière à entraîner la deuxième courroie de ralentissement (22) à la deuxième vitesse de déplacement variable (V2) afin de ralentir un véhicule (5) le long de la deuxième partie (TR2) de la trajectoire de ralentissement (TR).
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1652966A FR3049547B1 (fr) | 2016-04-05 | 2016-04-05 | Systeme de deplacement pour deplacer des vehicules d’une installation de transport aerien par cable tracteur |
| PCT/FR2017/050807 WO2017174933A2 (fr) | 2016-04-05 | 2017-04-05 | Système de déplacement pour déplacer des véhicules d'une installation de transport aérien par câble tracteur |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3439937A2 EP3439937A2 (fr) | 2019-02-13 |
| EP3439937B1 true EP3439937B1 (fr) | 2020-11-18 |
Family
ID=56263894
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP17724853.1A Active EP3439937B1 (fr) | 2016-04-05 | 2017-04-05 | Systeme de deplacement pour deplacer des vehicules d'une installation de transport aerien par cable tracteur et procédé correspondant |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3439937B1 (fr) |
| FR (1) | FR3049547B1 (fr) |
| WO (1) | WO2017174933A2 (fr) |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1401291A (fr) * | 1964-04-15 | 1965-06-04 | Neyrpic Ets | Dispositif de réception en gare des véhicules de téléphériques |
| DE2645455C3 (de) * | 1976-10-08 | 1981-10-22 | Habegger, Willy, Hünibach | Vorrichtung zum Beschleunigen bzw. Verzögern von Fahrzeugen einer Seilschwebebahn |
| FR2730691B1 (fr) * | 1995-02-21 | 1997-04-25 | Reel Sa | Dispositif variateur de la vitesse des vehicules d'une installation de transport aerien par cable(s) |
| AT12625U1 (de) * | 2010-10-18 | 2012-09-15 | Innova Patent Gmbh | Seilbahnanlage |
-
2016
- 2016-04-05 FR FR1652966A patent/FR3049547B1/fr not_active Expired - Fee Related
-
2017
- 2017-04-05 EP EP17724853.1A patent/EP3439937B1/fr active Active
- 2017-04-05 WO PCT/FR2017/050807 patent/WO2017174933A2/fr active Application Filing
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3439937A2 (fr) | 2019-02-13 |
| WO2017174933A3 (fr) | 2018-03-08 |
| FR3049547A1 (fr) | 2017-10-06 |
| FR3049547B1 (fr) | 2019-07-05 |
| WO2017174933A2 (fr) | 2017-10-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2675949C1 (ru) | Устройство для присоединения транспортного средства к тяговому канату, транспортное средство, обеспеченное таким устройством, и транспортная установка с тяговым канатом, включающая в себя такое транспортное средство | |
| EP0018932B1 (fr) | Dispositif de transport funiculaire à double câble, bouclé sur lui-même et à variation de vitesse | |
| EP0114129A1 (fr) | Dispositif cadenceur pour télécabine ou télésiège débrayable | |
| EP1864882B1 (fr) | Installation de transport à câble à regroupement de véhicules avant embarquement/débarquement et procédé de contrôle | |
| EP2036797A1 (fr) | Installation de transport de passagers embarqués à bord d'un véhicule, à deux moyens de déplacement du véhicule | |
| FR2927598A1 (fr) | Systeme d'aide a l'embarquement et/ou au debarquement de passagers a bord de cabines | |
| EP2990292B1 (fr) | Installation et procédé de transport par câble aérien | |
| EP0051594B1 (fr) | Systeme de transport automatique a vehicules passifs tractes par cable | |
| EP3439937B1 (fr) | Systeme de deplacement pour deplacer des vehicules d'une installation de transport aerien par cable tracteur et procédé correspondant | |
| FR2810655A1 (fr) | Mecanisme a traction variable pour un dispositif de securite de survitesse a organe de commande rotatif | |
| EP0922620A1 (fr) | Procédé de stockage et déstockage de cabines dans les gares d'une installation de transport à cable aérien | |
| EP0507699B1 (fr) | Dispositif d'entraînement de véhicules par des roues de friction | |
| US3596607A (en) | Cable drive device for an endless cable installation | |
| EP2014533A1 (fr) | Installation de transport par cable aérien comportant un circuit de transfert des véhicules muni d'un moteur-couple | |
| EP1193153B1 (fr) | Installation de déplacement de véhicules tractés par câble | |
| US6431080B1 (en) | Accelerator and decelerator sliding block, in particular for transport system vehicles, and conveyor associable to said sliding block | |
| EP0227508B1 (fr) | Installation de transport sur voie de guidage comportant un agencement de sécurité pour le freinage d'urgence d'au moins une voiture assurant le transport | |
| FR2654052A1 (fr) | Procede pour la mise en route et l'arret d'une installation de transport aerien par cable. | |
| FR2691692A1 (fr) | Système de transport comprenant des véhicules roulant sur des rails et tractés par un câble. | |
| FR2675451A1 (fr) | Dispositif d'entrainement et de commande d'une pince d'un teleporteur. | |
| SU1131715A1 (ru) | Включающее устройство дл сцепного прибора вагонетки канатной дороги | |
| JPH11334594A (ja) | 斜行軌道牽引車用非常停止装置 | |
| FR2689846A1 (fr) | Télésiège à débrayage simplifié. | |
| FR2639304A1 (fr) | Telepherique debrayable a dispositif de deceleration ou d'acceleration des vehicules | |
| FR2689847A1 (fr) | Pince de télésiège. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20181105 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20191220 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602017027760 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1335451 Country of ref document: AT Kind code of ref document: T Effective date: 20201215 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: CABINET GERMAIN AND MAUREAU, CH |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20201118 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210219 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210218 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210318 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210218 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602017027760 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20210819 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602017027760 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20210405 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210405 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211103 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210405 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210405 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210430 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: UEP Ref document number: 1335451 Country of ref document: AT Kind code of ref document: T Effective date: 20201118 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230612 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20170405 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20240501 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20240422 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20240410 Year of fee payment: 8 Ref country code: FR Payment date: 20240412 Year of fee payment: 8 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201118 |