EP3438946A2 - Procédé de prédiction d'un moment de commutation d'un groupe de signaux d'une installation de signalisation - Google Patents
Procédé de prédiction d'un moment de commutation d'un groupe de signaux d'une installation de signalisation Download PDFInfo
- Publication number
- EP3438946A2 EP3438946A2 EP18186211.1A EP18186211A EP3438946A2 EP 3438946 A2 EP3438946 A2 EP 3438946A2 EP 18186211 A EP18186211 A EP 18186211A EP 3438946 A2 EP3438946 A2 EP 3438946A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- signal
- time
- artificial intelligence
- signal state
- traffic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images



Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096766—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission
- G08G1/096775—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission where the origin of the information is a central station
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0145—Measuring and analyzing of parameters relative to traffic conditions for specific applications for active traffic flow control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/07—Controlling traffic signals
- G08G1/08—Controlling traffic signals according to detected number or speed of vehicles
Definitions
- the invention relates to a method for predicting a switching time of a signal group of a signaling system, a computer program product and a computing unit.
- the object of the invention is to improve a method for predicting a switching time of a signal group of the signal system from a signal state to a following signal state.
- a switching time of the signal group of the signaling system is predicted from a signal state to a subsequent signal state taking into account data of the traffic of the road and the signal state of the signal group using an artificial intelligence using a computing unit.
- the artificial intelligence is executed by a computing unit.
- the information about the switching time or the remaining time for the present signal state of the signal group can be displayed or transmitted to vehicles.
- vehicles take into account the information about the switching time or the remaining time of a current signal state when approaching the signal group and, for example, make a speed adjustment in such a way that the vehicle with as little as possible waiting time at the signal group, the crossing or the signaling system can happen.
- the prediction of the switching time can be carried out for a signal group of a signal system or for several signal groups of the signal system.
- the prediction of the switching times for all signal groups of the signaling system i. be carried out for all traffic lights of the intersection light signal system.
- a further improvement of the method is achieved in that in addition to the switching time or the remaining time of the present signal state, a probability for the remaining time of the present signal state is determined. Probability allows a driver or vehicle to evaluate the reliability of predicted signal time remaining and thus obtain more accurate information about the future switching behavior of the signal group. For example, for a green signal of a traffic light, a probability for the occurrence of the green signal is determined. The probability of the signal state can be determined not only for the current signal state, but also for future signal states.
- the determination of the probability for the remaining time of the present signal state and / or for future signal states can be carried out for a signal group of a signal system or for several signal groups of the signal system.
- the determination of the probabilities of the signal states can be carried out for all signal groups of the signal system, ie for all traffic lights of the traffic light system of the intersection.
- the probability of the signal states ie, for example, the probability of a green signal of the traffic light, can be predicted for a given temporal forecast horizon into the future, for example for 120 seconds or longer into the future.
- At least one information about a control program is taken into account by the artificial intelligence, wherein the control program controls the signaling system.
- the information about the control program may include, for example, the type of the control program and so on.
- the artificial intelligence takes into account at least one current time, in particular a current time and / or a current day of the week and / or a current month and / or a current holiday. This can also improve the prediction of the switching time and the determination of the probability of the signal state.
- the artificial intelligence takes into account a cycle time within a control program and / or a circulation time of the control program after which the control program is repeated.
- a message of a public means of transport and / or a request for a public means of transport for an enable signal of the signal system are taken into account by the artificial intelligence.
- the forecast for the switching time or the switching times between two signal states for a specified future period in particular for 30 seconds or up to 120 seconds or longer performed.
- several changes of signal states and thus several switching times between two consecutive signal states can be predicted.
- not only the next switching time, but several future switching times between signal states are determined. This allows a longer-term forecast for the switching behavior of the signal group of the signaling system.
- the probabilities for the future signal state (s) of at least one, in particular all signal groups of a signaling system of an intersection are calculated for a specified future period of time, in particular for 30 seconds or up to 120 seconds or longer.
- probabilities for several following signal states can be predicted.
- the probability for the current signal state, but also for several future signal states can be determined. This allows a longer-term forecast for the switching behavior of the signal group of the signaling system.
- traffic information is taken into account by the artificial intelligence.
- Traffic information may include information about a traffic jam or accident, and so on.
- the traffic information can have a significant effect on the traffic volume or the traffic at the signaling system. Thus, the determination of the switching timing for the change of signal states of the signal groups in consideration of traffic information is improved.
- At least part of the forecast of the switching time is performed in an external computing unit, in particular in a cloud.
- the entire forecast of the switching time or the remaining time in the external arithmetic unit can be executed.
- computing time can be saved in the arithmetic unit itself. This requires data communication between the arithmetic unit of the signaling system and the external arithmetic unit. This can be carried out, for example, wireless or wired.
- At least part of the determination of the probability of the signal state is carried out in an external computing unit, in particular in a cloud.
- the entire determination of the probability of the signal state or the remaining time in the external arithmetic unit can be performed.
- computing time can be saved in the arithmetic unit itself. This requires data communication between the arithmetic unit of the signaling system and the external arithmetic unit. This can be carried out, for example, wireless or wired.
- an artificial intelligence is used, which was trained with traffic data of the road of the signal system and the signal states of the signal group.
- the artificial intelligence is able to predict the switching time between signal states well and reliably.
- one of the following parameters may preferably be additionally used: information about the control program that controls the signaling system; a current time, in particular a time of day and / or a day of the week and / or a month and / or a public holiday; a cycle time and / or a round trip time of the control program; Presence of a fixed-time control or a traffic-dependent control or presence of a central control or a local control; a message of a public transport and / or request for a public transport release signal; Traffic information, etc.
- These parameters can be used to achieve a more precise modeling of artificial intelligence.
- At least part of the training of the artificial intelligence can be carried out in an external computing unit, in particular in a cloud.
- the artificial intelligence is transmitted to the arithmetic unit. As a result, computing capacity of the arithmetic unit of the signal system is saved.
- the artificial intelligence is trained during the operation of the signaling system and the newly trained artificial intelligence is used by the computing unit after completion of the training.
- the artificial intelligence is trained during the operation of the signaling system and the newly trained artificial intelligence is used by the computing unit after completion of the training.
- Regular adaptation of the model of artificial intelligence may result in improved prediction of the switching times and / or the probabilities of signal conditions of the signal systems.
- a regular training of the artificial intelligence for example, a changed traffic volume can be considered.
- the predicted switching time between two signal states of a signal group and / or a probability for the predicted signal state is transmitted to at least one road user, in particular wirelessly.
- the road users may be, for example, pedestrians, cyclists, vehicles, etc.
- this information can be taken into account by the road user for improved planning, in particular control of the vehicle, in particular control of the speed of the vehicle. In this way, unnecessary waiting times at a signaling system can be reduced. Furthermore, energy consumption of the vehicles can be reduced.
- a neural network in particular a recursive neural network, can be used for the training of the artificial intelligence.
- these networks were good results in the prediction of switching times reached between the signal states of a signal group of a signaling system. With these networks, good results have been achieved in predicting probabilities for the signal states of the signal group.
- Modern traffic signal systems for controlling traffic on roads have the task of controlling the traffic as far as possible with low waiting times at the traffic signals at a high throughput rate of vehicles.
- green-wave method are used to a possible fluent traffic with a relatively high average speed and to achieve short service lives in signal systems.
- Good traffic control can be achieved in that the road users, in particular the vehicles receive information about future signal states of a signal group of a signaling system and in particular information about future switching times between future signal states of a signal group of a signaling system.
- the future signal states or the switching times for the change of the signal states of the signal system can be sent, for example, wirelessly from switching points on the roadside or via mobile radio from an external arithmetic unit to the vehicles.
- a driver of a vehicle or a control unit of the vehicle can e.g. determine or set an optimized speed that is advantageous for the vehicle.
- the optimized speed can be calculated on the basis of the current location of the vehicle, which is known for example by GPS information, the location of the signal group and the expected switching time of the signal group.
- An object of the present method and system is to enable improved prediction of the remaining time of a signal state of a signal group of a signaling system until a next switching time.
- a further improvement can be achieved by additionally determining a probability for the remaining time until the next switching time of the signal state and, in particular, transmitting it to the road users.
- the proposed method can be applied to individual signal systems with one or more signal group, several signal systems with several signal groups and a composite of signal systems and signal groups.
- Remaining times can be determined for a given time horizon in the future.
- the prediction of the switching times can be a classification problem that is optimized by means of a cross entropy.
- an artificial intelligence in particular a neural network, a probability distribution over the signal state of the respective signal group over the temporal prognosis horizon is obtained.
- a simulation model for the switching times simulated with the artificial intelligence, in particular the neural network can fulfill two tasks: data-based learning of the switching behavior of the signal groups of the signal system and a time-dependent system model of the traffic flows, as detected by detectors, as well as the resulting switching behavior of the signals Signal groups of the signaling system.
- the prediction model may preferably be created by methods for modeling dynamic systems, in particular using neural networks, preferably recurrent neural networks.
- neural networks preferably recurrent neural networks.
- the following architectures and networks can be used: recurrent neural networks, fixed-point convergence networks, Elman-Jordan networks, ECNN, causal retro-causal networks, LSTM, gated recurrent units.
- the neural networks make it possible to provide information about the predictive certainty of the switching states or switching times, as well as to distinguish safe from unsafe states. Possibilities for this are: The derivation of the uncertainty from a model error, dispersion of the output of models, the derivation of a bandwidth of a conditional-density-estimation, generation of model-output by scenario-building.
- the network can be able to learn statistical and system-inherent dynamic relationships between input variables and output variables. For example, the network can learn an increased traffic volume at a specific time and, taking into account these statistical relationships, for example, predict a higher red probability for a given signal group at that time.
- a switching time is understood to mean the point in time at which a signal group makes a signal change.
- the signal group can switch from the signal free travel, which is indicated for example by a green signal, to restricted travel, which is indicated by a red signal, for example.
- This can be formalized as a regression problem between a real switching time versus a predicted switching time.
- the architecture of the forecasting model may be able to map a certain memory effect.
- the proposed method or the proposed system can provide a prognosis matrix which contains a predicted probability for a signal state for each time point in a predefined time window and for each signal group of a signaling system.
- the prediction matrix may include a probability of a green signal of a traffic light or a probability of a red signal of a traffic light for each time window.
- This task can be solved by using a multi-objective learning problem.
- a prediction of signal states, in particular probabilities for signal states and remaining time forecasts can be solved by a switching state from a signal state to a following signal state for all signal groups of a signaling system using a neural network, which solves the learning problem dynamically and integrated.
- the method used requires no information about a precise circuit diagram of the traffic signal system and also no expert knowledge about the causal relationships in a traffic control system.
- the proposed method has a high scalability with regard to an application to different traffic signal systems, since this is a method that only needs to be calibrated on the basis of a given data set, ie, artificial intelligence has to be trained.
- the forecasting model is in real time usable and can be retrained to current data at any time.
- Neural networks are parametric functions that can be trained by data driven stochastic gradient descent. Thus, the neural networks are able to recognize non-linear relationships without expert knowledge. Likewise, one of the technical features of neural networks is that the architecture used allows an integrated prediction of switching timing and state. Recurrent neural networks enable a higher degree of predictive quality, since they are better able to map the underlying dynamics of the system to be modeled as well as occurring memory effects than pure input-output models such as feed-forward networks.
- FIG. 1 shows a schematic representation of a structure of a signal system 14 with three signal groups 6, 7, 8.
- the signal system 14 has a control unit 5, which is connected to detectors 1, 2, 3.
- the detectors 1, 2, 3 detect various parameters of traffic on at least one road on which the signal system 14 with the signal groups 6, 7, 8 is arranged.
- vehicles are detected on the road.
- a control of the signal system 14 adapted to the traffic can take place.
- a computing unit 4 is provided, which receives information about the traffic either directly from the detectors 1, 2, 3 information about the traffic on the road or via the control unit 5.
- the arithmetic unit 4 also receives the information about the traffic, in particular about the traffic density on the roads of an intersection.
- the data of the detectors 1, 2, 3 are obtained, for example, from the arithmetic unit 4 via a first input 9.
- the control unit 5 has a data memory and control programs with which, depending on various parameters and in particular depending on traffic data, which are detected by means of the detectors 1, 2, 3, the signal groups 6, 7, 8 of the signal system 14 are driven in such a way in that a desired traffic flow can take place on the road, in particular via an intersection.
- the signal groups 6, 7, 8 are formed in the illustrated embodiment as light signal groups.
- Each signal group has a red light indicator, a yellow light indicator, and a green light indicator.
- the indicator for red light means for the traffic that the passage past the signal group is blocked.
- the display of the green light means that passing by the signal group is enabled.
- the yellow light indication means that a signal change between the release, i. green light and blocking, i. red light takes place.
- the signal groups 6, 7, 8 may also have other signals to enable a ride or to block a ride.
- the control unit 5 also forwards the control signals for the signal groups of the signal system to a second input 10 of the arithmetic unit 4.
- the arithmetic unit 4 also has the information as to which signal group is currently displaying which signal.
- a fourth input 15 is provided, via which the control unit 5 transmits to the arithmetic unit 4 further information about the control program which the control unit 5 uses to control the signal system 14 with the signal groups 6, 7, 8.
- the information about the control program may include, for example, the round trip time, the cycle time, information as to whether it is a central controller, a local controller, or a controller that can be activated by the traffic, whether errors in the controller or the Traffic lights are present, whether it is a traffic-dependent control, whether an error is present at the detector, whether it is a higher-level control or a central control is in which state the control unit is located, etc.
- the arithmetic unit 4 also has a third input 11, via which further information is obtained.
- the further information may include, for example, traffic information, information about a public transport, a public transport message at a reporting point, or a request for free travel by a public transport, and so on.
- the message of the means of transport may for example comprise information about the type of means of transport or an identification of the means of transport, such as a line number of the means of transport.
- a public transport can be a bus, a tram, etc.
- the arithmetic unit 4 has a time unit with which the current time can be determined.
- the arithmetic unit 4 has information about which time, which day of the week, which month, which calendar day, which year, etc. is straight.
- information about a current holiday of the arithmetic unit 4 may be available or made available via the third input.
- the arithmetic unit 4 can be transmitted via the third input 11 information about the traffic, such as traffic information.
- Traffic information can be, for example, information about accidents, traffic jams, heavy traffic, road closure etc.
- the arithmetic unit 4 has an artificial intelligence in the form of a computer program and / or in the form of hardware circuits, wherein the artificial intelligence is designed to predict a switching time of at least one signal group from one signal state to a subsequent one based on at least one of the available parameters Predict signal state.
- the residual time duration of the present current signal state can thus for at least one signal group and also switching times between future signal states of the signal group can be predicted.
- the time horizon up to which the signal profile and thus the switching times between the signal states of a signal group is predicted can be in the range of a few seconds up to 30 seconds and also longer than 30 seconds.
- the prognosis can determine a probability for the predicted remaining time duration of the current signal state of a signal group. Furthermore, a probability for the predicted time duration and the predicted switching times between the signal states can also be determined for future signal states.
- the determination of the switching times between signal states of a signal group can be updated at fixed time intervals. For example, every second for the given future time horizon of, for example, greater than 30 seconds, in particular greater than 120 seconds, the switching times between the signal states of the signal group can be predicted. In addition, every second the probabilities for the signal states of the signal group can be determined. This simultaneously determines a remaining duration of the present signal state of the signal group.
- the arithmetic unit 4 may be designed to determine the switching times for a transition between signal states of the signal systems for a given future time horizon for several signal groups of the signal system, in particular for all signal groups of the signal system.
- the arithmetic unit 4 can be designed to determine the probabilities for the residual time durations of the current signal states of the signal groups of the signal system for a plurality of signal groups 6, 7, 8, in particular for all signal groups of the signal system.
- the switching times and the probabilities for the following signal states of the signal groups can also be determined for the change of further signal states of the signal groups of the signal system. It can also be dependent of the selected embodiment, the arithmetic unit 4 may be designed to determine the switching times of the signal groups of the signal systems and the probabilities for the signal states of the signal groups of the signaling system for several signal systems. The arithmetic unit 4 and the control unit 5 may also be formed in a single arithmetic unit, depending on the selected embodiment. The probabilities are determined by the arithmetic unit 4 from a learned historical comparison of the predicted switching times with the actually measured switching times. In this case, switching times for certain traffic situations and states of the signaling system are predicted for a fixed future period of time.
- the probability with which the predicted signal states have actually occurred is checked by means of the detectors.
- other methods for determining the probabilities of the signal states may also be used.
- At least one future switching time or a remaining time of the current signal state or a time duration of a future signal state is transmitted from the arithmetic unit 4 to a vehicle 13 via an output 12, for example wirelessly.
- the switching times of future transitions between signal states for a given future time horizon of at least one of the signal groups of the signaling system, in particular all signal groups of the signaling system can be transmitted to the vehicle 13.
- the durations of the current signal states of the signal groups and the durations of the future signal states of the signal groups for a given future time horizon may be at least for one of the signal groups of the signaling system, in particular for all signal groups of the signaling system are transmitted to the vehicle 13. Furthermore, this information can also be transmitted to an external computing unit 16.
- the vehicle 13 and / or the external computing unit 16 can transmit the information about the future switching times of the signal groups of the signaling system and / or the durations of the current and / or future signal states of the signal groups and / or the probabilities of the current and / or future signal states use the signal groups for a statistical evaluation, travel planning a route and / or control of a speed of the vehicle or an output of information to a driver.
- the data in the vehicle 13 may be used by a control unit to automatically control a speed of the vehicle.
- the information in the vehicle 13 can be read into a navigation system or navigation program and taken into account for the route planning.
- the information can be displayed to the driver via a display, for example a display of a mobile telephone or a display of an integrated navigation system.
- the external arithmetic unit 16 can also be configured to transmit the transmitted information about the future switching times of the signal groups of the signal system and their probabilities to vehicles 13 wirelessly.
- the external computing unit 16 can be implemented as a cloud or as a single external computing unit. Depending on the selected embodiment, the parameters that are detected by the arithmetic unit 4 can also be transmitted to the external arithmetic unit 16. In addition, the external computing unit 16 can be designed to train the artificial intelligence and to implement the corresponding model for the prediction of the switching times and the probability of the signal states.
- the trained artificial intelligence can then be transmitted to the arithmetic unit 4 as a computer program.
- the interface between the external arithmetic unit 16 and the arithmetic unit 4 may be wireless but also wired.
- the calculation of the forecast for the switching times and / or the calculation of the probabilities of the signal states can also be carried out in the external arithmetic unit 16.
- the external arithmetic unit 16 can transmit the determined probabilities of the current and future signal states of the signal groups and the determined future switching times of the signal groups to the arithmetic unit 4.
- the external computing unit 16 may be designed to transmit the information about the switching times and the probabilities of the switching times to further computing units or to the vehicles 13.
- the arithmetic unit 4 can carry out the transmission of the switching times of the signal groups and / or the probabilities of the signal states to the vehicles 13, for example wirelessly.
- the arithmetic unit 4 and / or the external arithmetic unit 16 can train the artificial intelligence.
- the data required by the arithmetic unit 4 to predict the switching times and / or the probabilities of the signal states can be requested from the control unit 5 via a data connection.
- the parameters can be polled and received every second by the control unit 5.
- the data required for training the model can be transmitted every second from the arithmetic unit 4 and / or from the control unit 5 to the external arithmetic unit 16.
- only the arithmetic unit 4 can perform the training of the artificial intelligence.
- the artificial intelligence of the arithmetic unit 4 can be transmitted externally.
- FIG. 2 shows a schematic representation of an intersection 17 at which a second road 18 opens into a first street 19 or branches off.
- the first signal group 6 and the first detector 1 are arranged to the left of the intersection 17.
- the second detector 2 and the second signal group 7 are arranged.
- the third detector 3 and the third signal group 8 are arranged on the first street 19.
- the detectors 1, 2, 3 are connected to the control unit 5 and the arithmetic unit 4.
- the arithmetic unit 4 and the control unit 5 may also be formed in a single arithmetic unit, depending on the selected embodiment.
- the computing unit 4 and / or the control unit 5 are arranged at the roadside in a switchbox.
- the signal groups 6, 7, 8 of the signal system 14 are connected to the control unit 5 in connection.
- the detectors 1, 2, 3 are designed to detect vehicles approaching the intersection 17.
- the control unit 5 depending on the current traffic, a traffic-dependent control of the signal states of the signal groups 6, 7, 8 of the signaling system 14 perform.
- the control unit 5 may communicate with the arithmetic unit 4 via an Ethernet, for example.
- the current information about the signal program, the orbital period, the cycle time, the signal state for the control of the signal states of the signal groups, the data of the detectors, information about messages can currently be accessed via this connection public transport etc. at fixed intervals, for example, every second.
- the arithmetic unit 4 can be used as artificial intelligence for modeling the switching behavior of at least one signal group of a signal system or several, in particular all signal groups of a signaling system of an intersection, for example a neural network, a recurrent neural network, a fixed-point convergence network, an Elman-Jordan network , ECNN, a Causal-Retro-Causal Network, an LSTM, a Gated Recurrent Network.
- FIG. 3 shows a simple, schematic example of a neural network in the form of a recurrent neural network.
- a state transition is determined by a previous internal hidden state of the system s t-1 at time t-1 and the influence of an external parameter u t at time t on the new state s t at time t.
- the states s t , s t-1 , etc. may be parameters or vectors having multiple parameters.
- the output equation determines the determinable output vector y t .
- the external parameters u t are the parameters that are detected by the detectors.
- the output vector y t are the signal states of the signal groups of the signaling system.
- s t tanh A s t - 1 .
- Bu t state u ⁇ transition y t Cs t output equation
- an input vector at time t with the weight B will act on the hidden layer of states s t .
- the hidden layer will transition to the output vector y t with a weight C.
- the state s t-1 with the weight A will act on the hidden layer.
- the hidden layer with a unit matrix id will affect the state s t .
- the output function NN (s t ; w) is realized as a linear function.
- FIG. 3 schematically illustrated recurrent neural network can be realized.
- the neural network has a hidden layer with the hidden states s t , where t defines an incremental time.
- an input vector u t with the weight B will act on the respective hidden state.
- an output vector y t is determined from the hidden state s t with the weight C.
- a hidden state s t-1 acts on the following state s t with the weight A.
- One task is to determine the model of the output vector y t as precisely as possible.
- the action of three previous states that is, s t-3 , s t-2 and s t-1 together with the current hidden state s t is used to determine future hidden states s t + 1 , s t- 2 , etc. and also to determine future output vectors y t + 1 , y t + 2 , etc.
- the neural network is trained in such a way that the weights A, B and C are determined, so that the output vectors y t calculated with the neural network correspond as exactly as possible to the measured output vectors y t .
- the parameters which are supplied to the arithmetic unit 4 via the first input 9, the third input 11 and the fourth input 15 are used to train the neural network as input vectors u t .
- the parameters which are supplied to the arithmetic unit 4 via the first input 9, the third input 11 and the fourth input 15 are used to train the neural network as input vectors u t .
- the parameters which are supplied to the arithmetic unit 4 via the first input 9 the third input 11 and the fourth input 15 are used to train the neural network as input vectors u t .
- the parameters which are supplied to the arithmetic unit 4 via the first input 9 the third input 11 and the fourth input 15 are used to train the neural network as input vectors u t .
- the parameters which are supplied to the arith
- At least one switching instant of a signal group from a current signal state to a following signal state is determined as the output vector.
- the output vector may include a probability for the correctness of a predicted signal state of at least one signal group of the signal system.
- the output vector can have the switching times between the occurring signal states of a signal group for a given time.
- the output vector can have probabilities for the signal states of at least one signal group for a predefined prognosis period.
- the output vector can have the switching times and / or the probabilities for the signal states of a plurality of signal groups of the signal system, in particular for all signal groups of the signal system. The measured output vectors are compared with the calculated output vectors.
- the calculated output vectors are adapted to the measured output vectors. If the difference between the calculated output vector and the measured output vector for each parameter is less than 5%, then the learning process is terminated and the model or neural network is maintained with the weights A, B, C.
- This model is used for a future prediction of switching instants and / or probabilities of the signal states from the arithmetic unit 4.
- a recurrent neural network with error correction can be used as artificial intelligence.
- FIG. 4 shows a table that the arithmetic unit 4 using artificial intelligence for switching times of four signal groups has been determined at continuous time points. In addition, probabilities for the presence of a green signal are given for the future.
- a first column 21 indicates the date and time at which the data was determined. The time progresses from top to bottom consecutively in time intervals of one second each.
- the individual signal groups with sgr_01 for the first signal group, sgr_02 for the second signal group, sgr_03 for the third signal group, and sgr_04 for the fourth signal group are indicated in a second column 22.
- the values for the four signal groups are given for each time point in each case.
- a first line 24 the times for future times are plotted with t for the present and t + 01, t + 02, t + 03, etc., respectively for the present + 1 second, 2 seconds and so on.
- the probabilities for a green phase are indicated in the columns under the times.
- the switching times, determined using artificial intelligence, for the respective signal group at the respective times are indicated.
- the switching time of 3 seconds is specified.
- the time 13:02 clock and 1 second for the first signal group sgr 01 at time t + 01 given a probability of 1% that a green signal, ie free travel from the signal group 1 is displayed.
- the probability of a green signal is also 1%.
- the probability is also only 2% for a green signal.
- the probability is 97% for a green signal. This can be explained by the fact that the switching time was determined at 3 seconds. The switching time calculates the time, which elapses starting at time t, until the signal of the signal group is switched over. The probability is for the times t + 5 to t + 20 at a value of 99%. Only at the time t + 25 the probability drops to 93% and at a time t + 30 to the probability of 79% for a green signal.
- the switching time is calculated with 3 seconds and indicated in the last column 23.
- the probabilities are given for the times t + 01 and t + 02, each with 1% for a green signal.
- the probability is 2% for a green signal.
- the probability of a green signal is 97%.
- the probability of a green signal is 99%.
- the switching time is calculated to be 29 seconds for the time of 25.02.2017 at 13:02 o'clock and 1 second.
- the probability of a green signal for the times t + 1 to t + 25 is only 1%.
- the probability of a green signal is 12%.
- the switching times are given in seconds, that is to say for the time 13:02 and 2 seconds and 13:02 and 3 seconds for the signal groups for the future. Accordingly, the probabilities for a green signal for the future are given.
- the switching times of the signal groups and the probability of the signal states of the signal groups can be transmitted from the arithmetic unit 4 to an external arithmetic unit and in particular to vehicles.
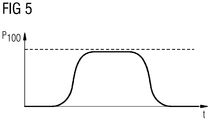
- FIG. 5 shows a schematic representation of the probability of a particular signal state of a signal group.
- the signal group can be configured as a traffic signal system, in particular as a traffic light.
- the signal state can be, for example, a green signal of the traffic light.
- the forecasting period can be up to 180 seconds into the future, but shorter or longer.
- the probability of 100% corresponds to a safe prognosis for the green signal.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Traffic Control Systems (AREA)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017213350.3A DE102017213350A1 (de) | 2017-08-02 | 2017-08-02 | Verfahren zur Vorhersage eines Schaltzeitpunktes einer Signalgruppe einer Signalanlage |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3438946A2 true EP3438946A2 (fr) | 2019-02-06 |
| EP3438946A3 EP3438946A3 (fr) | 2019-02-20 |
Family
ID=63103776
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18186211.1A Withdrawn EP3438946A3 (fr) | 2017-08-02 | 2018-07-30 | Procédé de prédiction d'un moment de commutation d'un groupe de signaux d'une installation de signalisation |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3438946A3 (fr) |
| DE (1) | DE102017213350A1 (fr) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110880052A (zh) * | 2019-11-22 | 2020-03-13 | 河北轨道运输职业技术学院 | 一种城市轨道交通短期客流动态预测方法 |
| WO2021037494A1 (fr) * | 2019-08-30 | 2021-03-04 | Siemens Mobility GmbH | Procédé et dispositif de prédiction d'un état de commutation et/ou d'un point de commutation d'un système de signalisation pour la régulation du trafic |
| EP3813034A1 (fr) * | 2019-10-22 | 2021-04-28 | Siemens Mobility GmbH | Procédé de détermination d'une valeur de temps restant actuelle ajustée pour une installation |
| DE102020202380A1 (de) | 2020-02-25 | 2021-08-26 | Siemens Mobility GmbH | Verfahren zur Verkehrsbeeinflussung und Verkehrsbeeinflussungseinrichtung |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102018221044A1 (de) * | 2018-12-05 | 2020-06-10 | Siemens Mobility GmbH | Verfahren und Vorrichtung zur Prognose eines Schaltzustands und eines Schaltzeitpunkts einer Signalanlage zur Verkehrssteuerung |
| DE102019218903A1 (de) | 2019-12-04 | 2021-06-10 | Siemens Mobility GmbH | Verfahren und Anordnung zur Vorhersage von Schaltzeitpunkten einer Signalgruppe einer Signalanlage zur Steuerung eines Verkehrsflusses |
| DE102020202656A1 (de) | 2020-03-02 | 2021-09-02 | Siemens Mobility GmbH | Bestimmen eines zukünftigen Schaltverhaltens einer Anlageeinheit |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE50100650D1 (de) | 2000-01-31 | 2003-10-23 | Siemens Ag | Anordnung miteinander verbundener rechenelemente und verfahren zur rechnergestützten ermittlung eines zweiten zustands eines systems in einem ersten zustandsraum aus einem ersten zustand des systems in dem ersten zustandsraum |
| US8972145B2 (en) * | 2013-03-15 | 2015-03-03 | Bayerische Motoren Werke Aktiengesellscahft | Systems and methods for predicting traffic signal information |
| HUE038758T2 (hu) * | 2015-09-21 | 2018-11-28 | Urban Software Inst Gmbh | Számítógépi rendszer és eljárás forgalmi rendszer monitorozására |
| CN105844927A (zh) * | 2016-04-06 | 2016-08-10 | 深圳榕亨实业集团有限公司 | 新型感知与控制的道路交叉口群信号控制系统及控制方法 |
| DE102017003346A1 (de) * | 2017-04-06 | 2017-10-26 | Daimler Ag | Verfahren zur Bereitstellung von Daten zur Ampelphasenschaltung |
-
2017
- 2017-08-02 DE DE102017213350.3A patent/DE102017213350A1/de not_active Withdrawn
-
2018
- 2018-07-30 EP EP18186211.1A patent/EP3438946A3/fr not_active Withdrawn
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021037494A1 (fr) * | 2019-08-30 | 2021-03-04 | Siemens Mobility GmbH | Procédé et dispositif de prédiction d'un état de commutation et/ou d'un point de commutation d'un système de signalisation pour la régulation du trafic |
| EP3813034A1 (fr) * | 2019-10-22 | 2021-04-28 | Siemens Mobility GmbH | Procédé de détermination d'une valeur de temps restant actuelle ajustée pour une installation |
| CN110880052A (zh) * | 2019-11-22 | 2020-03-13 | 河北轨道运输职业技术学院 | 一种城市轨道交通短期客流动态预测方法 |
| DE102020202380A1 (de) | 2020-02-25 | 2021-08-26 | Siemens Mobility GmbH | Verfahren zur Verkehrsbeeinflussung und Verkehrsbeeinflussungseinrichtung |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3438946A3 (fr) | 2019-02-20 |
| DE102017213350A1 (de) | 2019-02-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3438946A2 (fr) | Procédé de prédiction d'un moment de commutation d'un groupe de signaux d'une installation de signalisation | |
| EP3755592B1 (fr) | Trajectoires en essaim pour véhicules automobile | |
| DE102011083677A1 (de) | Prognose einer Verkehrssituation für ein Fahrzeug | |
| DE102019002790B4 (de) | Verfahren zur Prädiktion einer Verkehrssituation für ein Fahrzeug | |
| WO1998027525A1 (fr) | Procede pour completer et/ou verifier des donnees concernant l'etat d'un reseau routier; central d'informations routieres | |
| EP1920420A1 (fr) | Procede et dispositif pour generer automatiquement des strategies de gestion de la circulation | |
| DE102012204306A1 (de) | Verfahren zur Steuerung eines Bereitstellens von Verkehrsinformationsdaten zur Aktualisierung einer Verkehrsinformation | |
| DE10146398A1 (de) | System zum Steuern von Lichtsignalgebern an Kreuzungen | |
| EP2280383A1 (fr) | Procédé d'établissement d'informations de circulation pour un traject routier d'un réseau routier et calculateur de circulation destiné à l'exécution du procédé | |
| EP4046150B1 (fr) | Procédé et agencement pour prédire des temps de commutation d'un groupe de signaux d'un système de signal pour commander un écoulement de trafic | |
| DE10057796A1 (de) | Verfahren zur fahrzeugindividuellen Verkehrszustandsprognose | |
| DE102005044888B4 (de) | Verfahren, Anordnung und Simulationseinheit für ein Verkehrszustands-Schätzsystem | |
| DE102007062741B4 (de) | Verfahren und Prüfeinrichtung zum Prüfen eines Verkehrssteuerungssystems | |
| DE19944310C2 (de) | Verfahren und System zur Priorisierung des öffentlichen Personennahverkehrs | |
| DE102015218942A1 (de) | Verfahren zum Steuern einer Anzeige einer Restzeit | |
| DE10108611A1 (de) | Verfahren zur Simulation und Prognose der Bewegung von Einzelfahrzeugen auf einem Verkehrswegenetz | |
| DE102015115237B4 (de) | Steuervorrichtung und steuerverfahren für eine verkehrssteueranlage, und steuersystem | |
| DE102016216538A1 (de) | Verfahren zum Betreiben einer Steuervorrichtung eines Kraftfahrzeugs, Steuervorrichtung und Kraftfahrzeug | |
| AT510247B1 (de) | Verfahren zur regelung einer signalanlage | |
| EP2413302B1 (fr) | Procédé de réglage de la circulation d'un tramway | |
| DE2411716A1 (de) | Verkehrssteuersystem | |
| DE102015203115B4 (de) | Ermitteln von fehlerhaften Konfigurationen von Detektoren und Signalen von Lichtsignalanlagen | |
| WO2021190799A1 (fr) | Détermination du comportement futur de commutation d'une unité de système | |
| DE102008024781A1 (de) | Technik zur Reisezeitprognose | |
| DE19752605A1 (de) | Verfahren und Anordnung zur rechnergestützten Ermittlung einer in Meßdaten enthaltenen Struktur unter Verwendung von Fuzzy Clustering |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: G08G 1/0967 20060101ALI20190117BHEP Ipc: G08G 1/01 20060101ALI20190117BHEP Ipc: G08G 1/08 20060101AFI20190117BHEP Ipc: G08G 1/07 20060101ALI20190117BHEP |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: SIEMENS MOBILITY GMBH |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20190821 |