EP3085886A1 - Outil de creusement pour un tunnelier, ainsi que tunnelier comprenant un tel outil - Google Patents
Outil de creusement pour un tunnelier, ainsi que tunnelier comprenant un tel outil Download PDFInfo
- Publication number
- EP3085886A1 EP3085886A1 EP16164220.2A EP16164220A EP3085886A1 EP 3085886 A1 EP3085886 A1 EP 3085886A1 EP 16164220 A EP16164220 A EP 16164220A EP 3085886 A1 EP3085886 A1 EP 3085886A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- tooth
- screw
- support
- digging tool
- clearance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005520 cutting process Methods 0.000 claims abstract description 30
- 238000010079 rubber tapping Methods 0.000 claims abstract description 12
- 230000005641 tunneling Effects 0.000 abstract description 4
- 239000012120 mounting media Substances 0.000 abstract 1
- 238000007790 scraping Methods 0.000 description 5
- 241000920340 Pion Species 0.000 description 4
- 230000000295 complement effect Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 238000003466 welding Methods 0.000 description 2
- 238000005299 abrasion Methods 0.000 description 1
- 230000004323 axial length Effects 0.000 description 1
- 239000011324 bead Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005553 drilling Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images




Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21C—MINING OR QUARRYING
- E21C35/00—Details of, or accessories for, machines for slitting or completely freeing the mineral from the seam, not provided for in groups E21C25/00 - E21C33/00, E21C37/00 or E21C39/00
- E21C35/18—Mining picks; Holders therefor
- E21C35/19—Means for fixing picks or holders
- E21C35/193—Means for fixing picks or holders using bolts as main fixing elements
- E21C35/1936—Means for fixing picks or holders using bolts as main fixing elements the picks having a square- or rectangular-section shank
Definitions
- the present invention relates to a digging tool for a tunnel boring machine, and a tunnel boring machine comprising such a digging tool.
- a tunnel boring machine otherwise known as tunneling machine, comprises a tubular casing in front of which is provided a shield whose outer diameter corresponds to the diameter of the dug tunnel.
- the front part of the shield which comes into contact with the face to dig the terrain traversed by the tunneling machine, comprises a cutting head which is rotated on itself about an axis corresponding to the central longitudinal axis of the TBM.
- the felling of the ground is obtained by the rotation of the cutting head and the simultaneous advance thereof generated by a strong thrust against the face of size.
- the tunneling machine envelope is internally equipped with means for moving the TBM forward, a disposal system for the cuttings resulting from the felling of the ground and a laying device. of voussoirs inside the tunnel dug to gradually build a tube lining the inside of the tunnel.
- the cutting head includes radial arms that support digging tools for felling the ground.
- tools which rotate freely on themselves on a shaft integral with the cutting head and which are typically rollers rolling on the face to cut, tools which, in use, are provided fixed on the head cutting and attacking the face by scraping.
- the invention is concerned with the latter digging tools, which conventionally include a digging tooth of the ground to dig, sometimes called a pick, plane or knife.
- This tooth is subject, due to the geological nature of the terrain crossed, to heavy mechanical stresses and abrasion, so that it wears or even breaks and must be replaced periodically.
- the tooth is mounted interchangeably on a dedicated support, fixed permanently, usually by welding, on the arms of the cutting head.
- the tooth is retained on the support by removable fastening means, which must allow disassembly of the worn tooth and reassembly of a new tooth, both easy, using a portable tool and usual, and fast to prevent the tunnel boring machine from becoming too long.
- removable fastening means must be adapted to the operating conditions of the digging tool, including the forces and shocks that the tool undergoes, as well as the presence of cuttings and water.
- these fixing means must be provided to limit the constraints of use and minimize the weight of the tools to be handled by the operators having to carry out maintenance operations of the digging tool, in particular the replacement of his tooth: in fact, these operations are performed under difficult conditions for operators, from a room, often in overpressure, between the cutting head and a fixed vertical partition disposed behind this head.
- a first solution which is the most widespread, is to fix the tooth to the support by several screws, for example four screws or more, which pass through a smooth bore of the tooth to be screwed into complementary threads of the support, to tighten the tooth against the support.
- This solution has disadvantages. Indeed, the accessibility of the screw heads is delicate whereas these screws must be associated with washers and ideally tightened with the torque wrench, which involves long and tedious manipulations for the operator, with the risk of escaping or to lose the screws. In addition, these screws directly support most of the forces applied to the tooth. Furthermore, in the long run, the threads of the support tend to be damaged, because of the forces and the corrosion.
- a second solution is to wedge the tooth on the support so that, in use, the forces applied to the tooth are essentially taken directly by the support, while providing for the release of the tooth vis-à-vis the support in at least one predetermined clearance direction.
- a screw passes through both the tooth and the support and clamps them against each other by bringing a tightening nut to the opposite end of the screw at his head.
- a third solution has been proposed by EP-1,253,286-A1 on which the preamble of the appended claim 1 is based.
- the tooth is, in use, wedged on the support in all directions of the space except in a direction of disengagement.
- a screw fixes the tooth to the support of detachably: in a mounted configuration of this digging tool, the threaded end of the screw is screwed into a tapping of the tooth, whose central axis is parallel or slightly inclined with respect to the direction of disengagement, while the head of the screw is supported on a wall of the support through which the screw extends.
- the screw is partially unscrewed, then it is necessary to move the tooth first in a first translational movement in the direction of release, then in a second movement translation in a direction perpendicular to this direction of release: the first movement allows only partially disengage the tooth vis-à-vis the support, the continuation of this first movement being impossible because of the interference, in the direction of release between the head of the screw and the aforementioned wall of the support.
- the displacement of the tooth according to the second movement is due to the fact that the shank of the screw passes through the aforementioned wall of the support by a slot of this wall, this slot being oriented in the direction of the second translational movement and open at its end to let the rod out of the screw and thus allow the effective clearance of the tooth and screw vis-à-vis the support.
- the successive implementation of the first and second movements mentioned above can be tricky, in particular for a manipulator robot.
- the object of the present invention is to provide a digging tool of the type mentioned above, the mounting and fixing of the tooth are effective and fast, and particularly simple to implement, potentially automatically by a robot .
- the invention relates to a digging tool for a tunnel boring machine, as defined in claim 1.
- the fixing of the tooth on the support is carried out by at least one screw which, both when the tooth is mounted on the support and that the tool is thus in a state of service, when the tooth is disassembled vis-à-vis the support and that the tool is thus in a maintenance state for the purpose of repair or change of the tooth, is maintained physically secured to the tooth, remaining screwed into the tooth. There is therefore no risk of losing or escaping the screw during the handling of the tooth.
- the passage of the tool according to the invention between its assembled and disassembled configurations is carried out by relative screwing-unscrewing between the screw and the tooth.
- the screw bears little or almost no effort exerted by the ground on the tooth during the scraping action of the latter on the face of size: indeed , because of the direct engagement between the tooth and the support, in particular by wedging, these forces are taken up mostly, or even exclusively by the support, except in the direction of clearance of the tooth vis-à-vis the support, direction in which the screw ensures the locking of the tooth relative to the support by interfering with the latter.
- the part of the forces applied precisely in this direction of disengagement is small, even marginal with respect to the set of efforts which, cumulatively, are exerted on the tooth, these forces being oriented in a very large number of directions , according to the asperities of the face of size and as and when the rotation of the cutting head.
- the screw of the digging tool according to the invention can advantageously be dimensioned accordingly "a minimum” and be provided in one copy, which reinforces the ease of handling, while by guaranteeing the reliability of the digging tool in service.
- the invention also relates to a tunnel boring machine, comprising a cutting head, and at least one digging tool, which is as defined above and whose support is fixed permanently to the cutting head.
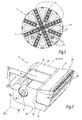
- FIG 1 is schematically represented a tunnel boring machine 1 whose tubular casing, with a substantially circular base, includes a front bumper comprising, in its front part, a cutting head 2 coming into contact with the face cut by the tunnel boring machine.
- the cutting head 2 sometimes called the drilling head, is designed to be rotated on itself about an axis 2A corresponding substantially to the central longitudinal axis of the tubular casing of the tunnel boring machine 1.
- TBM 1 is observed from the front and in the axis 2A, so that only its cutting head 2 is visible, the remainder of the TBM extending back and in the axial extension of the head.
- the tunnel boring machine 1 digs a ground by cutting the latter under the action of the rotation of the cutting head 2 and the simultaneous advance of this head, generated by a strong thrust against the front of size.
- the cutting head 2 comprises arms 3 extending radially to the axis 2A. These radial arms 3 delimit between them openings opening towards the rear of the head 2, in a felling chamber from which the cuttings torn from the face of the face by the head 2 are removed.
- Each of the radial arms 3 carries digging tools 4 designed to cut the ground by scraping, one of these tools 4 being represented alone and on a larger scale on the Figures 2 to 8 .
- each of the radial arms 3 also carries rollers 5, which rotate freely on themselves on a shaft integral with the arm and which, in use, roll on the face to cut it.
- this description is oriented with respect to a spatial reference consisting of three geometric axes X, Y, Z, drawn on the Figures 2 to 4 and orthogonal to each other.
- the Z axis is associated with the vertical, considering that its direction is directed upwards when it points towards the upper part of the Figures 2 to 6 while pointing downwards in the opposite direction.
- the X and Y axes define a horizontal geometric plane, the X axis being associated with an anteroposterior direction which is oriented forward when it points to the right Figures 2 and 4 to 6 while facing backwards in the opposite direction.
- the digging tool 4 comprises or consists of three main components that are a support 10, a tooth 20 and a screw 30.
- the support 10 includes a lower base 11 which, in its rear part, is surmounted by two branches 12 and 13.
- the branches 12 and 13 are spaced from each other in the direction of the Y axis.
- the rear of the base 11 is notched between the branches 12 and 13, and the entire spreading distance, along the Y axis between these branches.
- the base 11 thus delimits an upper surface 11A, which is inscribed in a plane perpendicular to the Z axis and which, in the example considered in the figures, extends, at the same time, between the branches 12 and 13 and in front of each of them.
- the base 11 delimits a rear surface 11 B, which is inscribed in a plane perpendicular to the axis X and which, in the example considered in the figures, extends between the branches 12 and 13 .
- the base 11 is designed to be fixed permanently to the cutting head 2, in particular to one of its radial arms 3, as in the example shown in FIG. figure 1 .
- This final fixing is carried out by any appropriate means, for example by welding the lower face of the base 11 to a side edge of the arm 3 concerned.
- the orientation of the support 10 relative to the arm concerned 3 or, more generally, with respect to the cutting head 2 is not limiting of the invention.
- the branch 12 On its side facing the branch 13, the branch 12 delimits a lateral surface 12A, which is inscribed in a plane perpendicular to the Y axis and which, in the example considered in the figures, extends over the entire extent of the branch 12 along the X and Z axes.
- the branch 13 On its side facing the branch 12, the branch 13 delimits a lateral surface 13A, which is inscribed in a plane perpendicular to the Y axis and which, in the example considered in the figures, extends over the entire extent of the branch 13 along the axes X and Z.
- the lateral surfaces 12A and 13A are thus facing each other along the Y axis.
- the branch 12 On its lateral side opposite its surface 12A, the branch 12 defines a housing 14 which is cylindrical, circular base and centered on an axis Y1 parallel to the Y axis.
- the housing 14 is thus recessed in the lateral face of the branch 12, opposed to branch 13.
- the branch 12 also delimits a slot 15 which, at the same time, connects the housing 14 to the upper face of the branch 12 along the Z axis and connects, along the Y axis, the bottom of the housing 14 to the lateral surface 12A of the branch 12.
- This slot 15 has a smooth wall and has a width, that is to say a dimension along the axis X, which is strictly smaller than the diameter of the housing 14.
- the branch 13 delimits for its part a through hole 16, with a smooth wall and connecting the lateral surface 13A to the lateral face of the branch 13, opposite the branch 12.
- This through hole 16 extends along the axis Y, in being centered on the Y1 axis, as clearly visible on the Figures 7 and 8 .
- branches 12 and 13 delimit respective front surfaces 12B and 13B, which are inscribed in the same plane perpendicular to the axis X and which, in the example considered in the figures, extend over an upper part of these branches .
- the tooth 20 comprises a front head 21 extended rearwardly by a body 22, conferring on the tooth 20 a "T" shape when it is observed along the Z axis.
- the head 21 On its front side, the head 21 is designed to attack the ground to dig, by scraping to pull cuttings. To this end, in a manner known per se and not limiting of the invention, the front of the head 21 is rigidly provided with inserts 23 of hard material, such as carbide, or, more generally, functionally resistant elements. similar in order to intensify the scraping action of the tooth 20 against the face of size.
- hard material such as carbide, or, more generally, functionally resistant elements. similar in order to intensify the scraping action of the tooth 20 against the face of size.
- the head 21 delimits, on either side, along the Y axis, the body 22, rear surfaces 21A and 21B, which are inscribed in the same plane perpendicular to the axis X and which, in the embodiment considered here, occupy the entire rear face of the head 21 outside the grip of the body 22.
- the head 21 delimits, on its lower side, a lower surface 21C, which is inscribed in a plane perpendicular to the Z axis and which, in the embodiment considered here, occupies a front part of the lower face of the head.
- the body 22 is provided at its rear end with a lower bead 24 which, at the junction with the rest of the body 22, forms a bend facing downwards.
- the heel 24 thus delimits a front surface 24A, which is inscribed in a plane perpendicular to the X axis and which, in the embodiment considered here, extends over substantially the entire front face of the heel.
- the body 22 delimits lateral surfaces 22A and 22B, opposite to each other along the axis Y, which are inscribed with each of the planes perpendicular to the axis Y and which, in the embodiment considered here, occupy substantially the entire extent of the corresponding lateral faces of the body 22.
- the support 10 and the tooth 20 are shaped to be engaged with each other so as to block, with functional clearances, any relative movement between them except an upward movement along the Z axis of the tooth relative to the support.
- the tooth 20 is designed to be mounted on the support 10 so that its body 22 is received between the branches 12 and 13 and its head 21 is received at the front of these branches while its heel 24 is received in the notch rear of the base 11.
- the lower surface 21C of the head 21 is in plane contact against the upper surface 11A of the base 11 so that the tooth is wedged down along the axis Z relative to the support 10.
- the distance, according to the X axis, between the rear surfaces 21 A and 21 B of the head 21 and the front surface 24A of the heel 24 is equal to a functional clearance by the distance, along the X axis, between the rear surface 11 B of the base 11 and the front surfaces 12B and 13B of the branches 12 and 13: in the mounted state of the tooth 20 on the support 10, the surfaces 24A, 21A and 21B are, in the abovementioned clearance, in plane contact with respectively the surfaces 11B, 12B and 13B so that the tooth 20 and the support 10 are wedged relative to each other both forward and backward along the X axis, as shown on the Figures 5 and 6 .
- the dimension, along the Y axis, of the body 22 is equal, with a functional clearance close, to the spacing, along this axis Y, between the branches 12 and 13: in the mounted state of the tooth 20 on the support 10, the lateral surfaces 22A and 22B of the body 22 are, with the clearance mentioned above, in plane contact with respectively the lateral surfaces 12A and 13A of the branches 12 and 13 so that the tooth 20 and the support 10 are wedged with the relative to each other in the two opposite directions, extending along the Y axis.
- the tooth 20 and the support 10 cooperate, in all directions of the space except upwards along the Z axis, by complementarity of shapes so as to to be fixedly connected to one another by wedging between the surfaces 21A, 21B, 21C, 22A, 22B and 24A and the surfaces 11A, 11B, 12A, 13A, 12B and 13B. It is also understood that to move the tooth 20 from the support 10 for the purpose of disassembling the tooth is only possible in a direction of clearance D, which is rectilinear and oriented in one direction, and which, in the example considered here and as indicated by an arrow on the figure 4 extends along the Z axis and is oriented upwards.
- the body 22 of the tooth 20 defines a through hole 25 which extends along the Y axis, connecting the side surfaces 22A and 22B to one another.
- This hole 25 is centered on an axis Y2 and is provided with a tapping 26 which, in the embodiment considered here, extends over the entire axial length of the hole 25.
- the hole 25 extends in the extension, along the Y axis, of the housing 14 and the hole 16 of the branches 12 and 13, the axes Y1 and Y2 then being substantially merged, as shown in FIGS. Figures 7 and 8 .
- the thread 34 of the screw 30 is complementary to the tapping 26 of the tooth 20, so that, as shown in FIG. figure 4 , the hole 25 of the tooth 20 is designed to movably receive the screw 30, by screwing-unscrewing between the thread 34 and the tapping 26, the Y2 and Y3 axes then being merged.
- the screw 30 is movable relative to the tooth along the Y axis, by means of its drive in rotation on itself.
- the screw 30 is provided to fix the tooth 20 to the support 10, not in the sense that this screw 30 rigidly binds the tooth 20 and the support 10 together by transmitting the forces between them in all directions, but in the sense that the screw 30 is designed to lock the tooth 20 relative to the support 10 only in the disengagement direction D, thus locking the mounted state of the tooth 20 on the support 10.
- the head 31 of the screw 30 is designed to be received inside the housing 14, the latter being provided complementary to the head 31, and the pin 32 of the screw 30 is designed to be received in the hole 16, the latter being provided complementary to the pin 32: by complementarity of shapes between, on the one hand, the head 31 and the housing 14 and, on the other hand, the pin 32 and the hole 16, to near functional play, the screw 30 is in potential interference with the support in all the radial directions to the axes Y1 and Y3 then substantially merged.
- the screw mechanically interferes with the support 10 only in the disengagement direction D, i.e. upwardly along the axis Z, this interference in the direction of clearance D being moreover exclusively between the screw and the support in the sense that, in this direction of clearance D, the support and the tooth are not in direct connection with each other.
- the screw 30 is, by driving its head 21 with the aid of a tool ad hoc not shown, unscrewed vis-à-vis the tooth 20 so as to leave, along the Y axis, the head 31 of the 14 and the pin 32 of the hole 16. This unscrewing of the screw 30 is continued until the entire head 31 of the housing 14 and the pin 32 of the hole 16, as shown in FIG. figure 8 , without extracting the screw 30 from the tapped hole 25 of the tooth 20, while keeping a portion of the thread 34 engaged with a portion of the thread 26.
- the tooth 20 and the screw 30 can then be jointly disengaged completely from the support 10, by being driven, manually or by appropriate tooling, upwards along the Z axis, that is, only in the disengagement direction D, as shown in FIG. figure 4 .
- the screw 30 does not block the relative clearance between the support 10 and the assembly consisting of the tooth and the screw 30, the latter must not interfere with the support 10 in the disengagement direction D, this which passes through an ad hoc dimensioning of its slot 15, the width of this slot, that is to say its dimension along the X axis, being greater, at least to a functional clearance, to the diameter of the rod 33 , as clearly visible on the figure 5 .
- the passage of the tool 4 from the disassembled configuration to the mounted configuration is done in a manner that is the opposite of what has been described for the transition from the assembled configuration to the disassembled configuration, by means of, successively, the complete assembly of the together, consisting of the tooth 20 and the screw 30, on the support 10 by driving this assembly only in a direction opposite to the direction of clearance D, then the screwing of the screw 30, until complete penetration of its 31 in the housing 14 and its pin 32 in the hole 16. In practice, this screwing is implemented until abutting, along the Y axis, the head 31 against the bottom of the housing 14.
- the passage of the digging tool 4 between its mounted and dismounted configurations is achieved simply by screwing-unscrewing the screw 30, while keeping it secured to the tooth 20: the corresponding manipulations are fast and easy to implement, if necessary automatically by a manipulator robot, without running the risk of losing the screw.
- the complete clearance, vis-à-vis the support 10, of the tooth 20 and the screw 30 which remains partially aimed therein, just like the assembly on the support of this assembly consisting of the tooth and the screw, are made by driving this assembly exclusively parallel to the disengagement direction D, respectively in the direction of this direction of disengagement and in the opposite direction: the manipulations
- they are quick and easy to implement, if necessary automatically by a manipulator robot.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- Geology (AREA)
- Earth Drilling (AREA)
Abstract
Description
- La présente invention concerne un outil de creusement pour un tunnelier, ainsi qu'un tunnelier comprenant un tel outil de creusement.
- Un tunnelier, autrement appelé machine de creusement d'un tunnel, comprend une enveloppe tubulaire à l'avant de laquelle est prévu un bouclier dont le diamètre extérieur correspond au diamètre du tunnel creusé. La partie antérieure du bouclier qui vient en contact avec le front de taille pour creuser le terrain traversé par le tunnelier, comporte une tête de coupe qui est entraînée en rotation sur elle-même autour d'un axe correspondant à l'axe longitudinal central du tunnelier. L'abattage du terrain est obtenu par la rotation de la tête de coupe et l'avance simultanée de celle-ci générée par une forte poussée contre le front de taille. A l'arrière du bouclier frontal, l'enveloppe du tunnelier est intérieurement équipée de moyens de déplacement du tunnelier vers l'avant, d'un système d'évacuation des déblais résultant de l'abattage du terrain et d'un dispositif de pose de voussoirs à l'intérieur du tunnel creusé afin de fabriquer progressivement un tube garnissant l'intérieur du tunnel.
- La tête de coupe comprend des bras radiaux qui supportent des outils de creusement destinés à l'abattage du terrain. On distingue les outils, qui tournent librement sur eux-mêmes sur un arbre solidaire de la tête de coupe et qui sont typiquement des molettes roulant sur le front de taille pour le couper, des outils qui, en service, sont prévus fixes sur la tête de coupe et qui attaquent le front de taille par raclage. L'invention s'intéresse à ces derniers outils de creusement, qui, de manière classique, comportent une dent d'attaque du terrain à creuser, parfois appelée pic, rabot ou couteau. Cette dent est soumise, du fait de la nature géologique du terrain traversé, à de fortes sollicitations mécaniques et à l'abrasion, si bien qu'elle s'use voire se casse et qu'elle doit donc être remplacée périodiquement. Dans cette optique, la dent est montée de manière interchangeable sur un support dédié, fixé à demeure, généralement par soudage, sur les bras de la tête de coupe. En pratique, la dent est retenue sur le support par des moyens de fixation amovibles, qui doivent permettre un démontage de la dent usée et un remontage d'une dent neuve, à la fois, faciles, en utilisant un outillage portatif et usuel, et rapides pour éviter une trop longue immobilisation du tunnelier. Bien entendu, ces moyens de fixation doivent être adaptés aux conditions d'exploitation de l'outil de creusement, notamment aux efforts et aux chocs que subit l'outil, ainsi qu'à la présence de déblais et d'eau. De plus, en principe, ces moyens de fixation doivent être prévus pour limiter les contraintes d'utilisation et minimiser le poids de l'outillage à manipuler par les opérateurs ayant à réaliser les opérations de maintenance de l'outil de creusement, notamment l'opération de remplacement de sa dent : en effet, ces opérations sont réalisées dans des conditions difficiles pour les opérateurs, à partir d'une chambre, souvent en surpression, entre la tête de coupe et une cloison verticale fixe disposée derrière cette tête.
- Une première solution, qui est la plus répandue, consiste à fixer la dent au support par plusieurs vis, par exemple quatre vis voire davantage, qui traversent un alésage lisse de la dent pour être vissées dans des taraudages complémentaires du support, jusqu'à serrer la dent contre le support. Cette solution présente des inconvénients. En effet, l'accessibilité des têtes de vis est délicate alors que ces vis doivent être associées à des rondelles et idéalement serrées à la clé dynamométrique, ce qui implique des manipulations longues et fastidieuses pour l'opérateur, avec le risque d'échapper ou de perdre les vis. De plus, ces vis supportent directement l'essentiel des efforts appliqués sur la dent. Par ailleurs, à la longue, les taraudages du support tendent à être endommagés, du fait des efforts et de la corrosion.
- Une deuxième solution consiste à caler la dent sur le support pour que, en service, les efforts appliqués à la dent soient essentiellement repris directement par le support, tout en prévoyant de pouvoir dégager la dent vis-à-vis du support dans au moins une direction de dégagement prédéterminée. Pour empêcher ce dégagement tant qu'il n'est pas souhaité, une vis traverse à la fois la dent et le support et les serre l'un contre l'autre en rapportant un écrou de serrage à l'extrémité de la vis, opposée à sa tête. Cette solution présente aussi des inconvénients. En effet, il est nécessaire, tant au montage qu'au démontage, de manipuler à peu près en même temps la vis et son écrou associé : dans les conditions de maintenance évoquées plus haut, et en tenant compte du fait que, eu égard aux diverses orientations possibles de l'outil liées à la position angulaire de la tête de coupe, la vis s'étend le plus souvent de manière inclinée par rapport à l'horizontale, on comprend que ces manipulations requièrent deux opérateurs, sauf à courir le risque élevé de perdre la vis et/ou l'écrou.
- Par ailleurs, aussi bien pour l'une que pour l'autre de ces solutions, le dégagement de la dent vis-à-vis du support nécessite que les vis soient totalement séparées de la dent et du support, le cas échéant après avoir été libérées de leur écrou : on comprend que les mouvements engagés dans les opérations correspondantes sont nombreux et complexes, ce qui fait que, en pratique, ces opérations ne peuvent pas, dans des coûts raisonnables, être mises en oeuvre par des robots manipulateurs.
- Une troisième solution a été proposée par
EP-1 253 286-A1 sur lequel est basé le préambule de la revendication 1 annexée. Comme pour la deuxième solution évoquée ci-dessus, la dent est, en service, calée sur le support dans toutes les directions de l'espace hormis dans une direction de dégagement. Pour empêcher que la dent ne se déboîte du support au cours de la rotation de la tête de coupe, une vis fixe la dent au support de manière amovible : dans une configuration montée de cet outil de creusement, l'extrémité filetée de la vis est vissée dans un taraudage de la dent, dont l'axe central est parallèle ou peu incliné par rapport à la direction de dégagement, tandis que la tête de la vis prend appui sur une paroi du support à travers laquelle la vis s'étend. Pour dégager la dent du support tout en maintenant la vis solidaire de cette dent, on dévisse partiellement la vis, puis il est nécessaire de déplacer la dent d'abord selon un premier mouvement de translation dans la direction de dégagement, puis selon un second mouvement de translation dans une direction perpendiculaire à cette direction de dégagement : le premier mouvement permet de déboîter seulement partiellement la dent vis-à-vis du support, la poursuite de ce premier mouvement étant impossible du fait de l'interférence, dans la direction de dégagement, entre la tête de la vis et la paroi précitée du support. Le déplacement de la dent selon le second mouvement tient au fait que la tige de la vis traverse la paroi précitée du support par une fente de cette paroi, cette fente étant orientée dans la direction du second mouvement de translation et ouverte à son extrémité pour en laisser sortir la tige de la vis et ainsi permettre le dégagement effectif de la dent et de la vis vis-à-vis du support. La mise en oeuvre successive des premier et second mouvements précités peut s'avérer délicate, en particulier pour un robot manipulateur. - Le but de la présente invention est de proposer un outil de creusement du type évoqué ci-dessus, dont le montage et la fixation de la dent sont efficaces et rapides, ainsi que particulièrement simples à mettre en oeuvre, potentiellement de manière automatique par un robot.
- A cet effet, l'invention a pour objet un outil de creusement pour un tunnelier, tel que défini à la revendication 1.
- Grâce à l'invention, la fixation de la dent sur le support est réalisée par au moins une vis qui, aussi bien lorsque la dent est montée sur le support et que l'outil est ainsi en état de service, que lorsque la dent est démontée vis-à-vis du support et que l'outil est ainsi en état de maintenance aux fins de la réparation ou du changement de la dent, est maintenue physiquement solidaire de la dent, en restant vissée dans cette dent. Il n'y a donc pas de risque de perdre ou d'échapper la vis lors des manipulations de la dent. Le passage de l'outil conforme à l'invention entre ses configurations montée et démontée s'effectue par vissage-dévissage relatif entre la vis et la dent. De plus, une fois que l'outil est en configuration démontée, l'entraînement conjoint de la dent et de la vis exclusivement dans la direction de dégagement permet de complètement dégager cette dent et cette vis vis-à-vis du support ; le montage de l'ensemble « dent + vis » sur le support est, quant à lui, totalement obtenu par entraînement de cet ensemble exclusivement en direction opposée à la direction de dégagement. Ainsi, les mouvements engagés pour le montage et le démontage de l'outil, à savoir le vissage-dévissage de la vis et l'entraînement rectiligne de l'ensemble « vis + dent » parallèlement à la direction d'engagement, sont limités, constants et répétitifs, l'ensemble « dent + vis » restant intègre et solidaire : les opérations de montage et démontage s'en trouvent facilitées et écourtées pour un opérateur humain, ces opérations étant même facilement adaptables à une mise en oeuvre automatique par un robot manipulateur.
- De plus, dans la configuration montée de l'outil, la vis ne supporte que peu, voire quasiment pas d'efforts exercés par le terrain sur la dent lors de l'action de raclage de cette dernière sur le front de taille : en effet, du fait de la mise en prise directe entre la dent et le support, notamment par calage, ces efforts sont repris majoritairement, voire exclusivement par le support, hormis dans la direction de dégagement de la dent vis-à-vis du support, direction dans laquelle la vis assure le blocage de la dent par rapport au support en interférant avec ce dernier. En pratique, la part des efforts appliqués précisément dans cette direction de dégagement est faible, voire marginale par rapport à l'ensemble des efforts qui, au cumul, s'exercent sur la dent, ces efforts étant orientés dans un très grand nombre de directions, selon les aspérités du front de taille et au fur et à mesure de la rotation de la tête de coupe. On comprend que la vis de l'outil de creusement conforme à l'invention peut, avantageusement, être dimensionnée en conséquence « a minima » et n'être prévue qu'en un seul exemplaire, ce qui en renforce la facilité de manipulation, tout en garantissant la fiabilité de l'outil de creusement en service.
- Des caractéristiques additionnelles avantageuses de l'outil de creusement conforme à l'invention sont spécifiées aux revendications 2 à 10.
- L'invention a également pour objet un tunnelier, comprenant une tête de coupe, et au moins un outil de creusement, qui est tel que défini ci-dessus et dont le support est fixé à demeure à la tête de coupe.
- L'invention sera mieux comprise à la lecture de la description qui va suivre, donnée uniquement à titre d'exemple et faite en se référant aux dessins sur lesquels :
- la
figure 1 est une vue de face d'un tunnelier conforme à l'invention ; - la
figure 2 est une vue en perspective d'un outil de creusement conforme à l'invention, en configuration montée ; - la
figure 3 est une vue en perspective d'un éclaté de l'outil de lafigure 2 ; - la
figure 4 est une vue en perspective, sous un angle d'observation différent de celui de lafigure 3 , de l'outil de lafigure 2 , en configuration démontée ; - les
figures 5 à 7 sont des coupes selon respectivement les plans V, VI et VII de lafigure 2 ; et - la
figure 8 est une vue similaire à lafigure 7 , montrant l'outil en configuration démontée. - Sur la
figure 1 est représenté schématiquement un tunnelier 1 dont l'enveloppe tubulaire, à base sensiblement circulaire, inclut un bouclier frontal comportant, dans sa partie antérieure, une tête de coupe 2 venant en contact avec le front de taille creusé par le tunnelier. De manière connue en soi, la tête de coupe 2, parfois appelée tête de foration, est conçue pour être entrainée en rotation sur elle-même autour d'un axe 2A correspondant sensiblement à l'axe longitudinal central de l'enveloppe tubulaire du tunnelier 1. Sur lafigure 1 , le tunnelier 1 est observé de face et dans l'axe 2A, de sorte que seule sa tête de coupe 2 est visible, le reste du tunnelier s'étendant en arrière et dans le prolongement axial de la tête. - Comme expliqué dans la partie introductive du présent document, le tunnelier 1 creuse un terrain en abattant ce dernier sous l'action de la rotation de la tête de coupe 2 et l'avance simultanée de cette tête, générée par une forte poussée contre le front de taille. Dans l'exemple de réalisation considéré sur la
figure 1 , la tête de coupe 2 comporte des bras 3 s'étendant radialement à l'axe 2A. Ces bras radiaux 3 délimitent entre eux des ouvertures débouchant, vers l'arrière de la tête 2, dans une chambre d'abattage à partir de laquelle les déblais arrachés au front de taille par la tête 2 sont évacués. Chacun des bras radiaux 3 porte des outils de creusement 4 conçus pour abattre le terrain par raclage, un de ces outils 4 étant représenté seul et à plus grande échelle sur lesfigures 2 à 8 . Bien entendu, la tête de coupe 2 peut être équipée d'autres outils de creusement que les outils 4 : ainsi, dans l'exemple de réalisation considéré sur lafigure 1 , chacun des bras radiaux 3 porte également des molettes 5, qui tournent librement sur elles-mêmes sur un arbre solidaire du bras et qui, en service, roulent sur le front de taille pour le couper. - Pour faciliter la description de l'outil de creusement 4 qui va suivre, cette description est orientée par rapport à un référentiel spatial constitué de trois axes géométriques X, Y, Z, dessinés sur les
figures 2 à 4 et orthogonaux entre eux. Par commodité, l'axe Z est associé à la verticale, en considérant que sa direction est dirigée vers le haut lorsqu'elle pointe vers la partie haute desfigures 2 à 6 , tandis qu'elle dirigée vers le bas en sens opposé. Les axes X et Y définissent un plan géométrique horizontal, l'axe X étant associé à une direction antéro-postérieure qui est orientée vers l'avant lorsqu'elle pointe vers la partie droite desfigures 2 et 4 à 6 , tandis qu'elle est orientée vers l'arrière en sens opposé. - Comme bien visible sur la
figure 3 , l'outil de creusement 4 comprend, voire est constitué de trois composants principaux que sont un support 10, une dent 20 et une vis 30. - Comme bien visible sur les
figures 3 et4 , le support 10 inclut une base inférieure 11 qui, dans sa partie arrière, est surmontée de deux branches 12 et 13. Les branches 12 et 13 sont distantes l'une de l'autre dans la direction de l'axe Y. Comme bien visible sur lesfigures 4 et6 , l'arrière de la base 11 est échancré entre les branches 12 et 13, et ce sur toute l'étendue d'écartement, selon l'axe Y, entre ces branches. La base 11 délimite ainsi une surface supérieure 11 A, qui est inscrite dans un plan perpendiculaire à l'axe Z et qui, dans l'exemple considéré sur les figures, s'étend, à la fois, entre les branches 12 et 13 et à l'avant de chacune d'elles. Au niveau de son échancrure arrière, la base 11 délimite une surface arrière 11 B, qui est inscrite dans un plan perpendiculaire à l'axe X et qui, dans l'exemple considéré sur les figures, s'étend entre les branches 12 et 13. - La base 11 est conçue pour être fixée à demeure à la tête de coupe 2, en particulier à l'un de ses bras radiaux 3, comme dans l'exemple montré à la
figure 1 . Cette fixation définitive est réalisée par tout moyen approprié, par exemple par soudage de la face inférieure de la base 11 à un bord latéral du bras 3 concerné. En pratique, l'orientation du support 10 par rapport au bras concerné 3 ou, plus généralement, par rapport à la tête de coupe 2 n'est pas limitative de l'invention. - Sur son côté tourné vers la branche 13, la branche 12 délimite une surface latérale 12A, qui est inscrite dans un plan perpendiculaire à l'axe Y et qui, dans l'exemple considéré sur les figures, s'étend sur toute l'étendue de la branche 12 selon les axes X et Z. De la même façon, sur son côté tourné vers la branche 12, la branche 13 délimite une surface latérale 13A, qui est inscrite dans un plan perpendiculaire à l'axe Y et qui, dans l'exemple considéré sur les figures, s'étend sur toute l'étendue de la branche 13 selon les axes X et Z. Comme bien visible sur les
figures 7 et 8 , les surfaces latérales 12A et 13A sont ainsi en regard l'une de l'autre selon l'axe Y. - Sur son côté latéral opposé à sa surface 12A, la branche 12 délimite un logement 14 qui est cylindrique, à base circulaire et centré sur un axe Y1 parallèle à l'axe Y. Le logement 14 est ainsi en creux dans la face latérale de la branche 12, opposée à la branche 13. Comme bien visible sur les
figures 3 et4 , la branche 12 délimite également une fente 15 qui, à la fois, relie selon l'axe Z le logement 14 à la face supérieure de la branche 12 et relie, selon l'axe Y, le fond du logement 14 à la surface latérale 12A de la branche 12. Cette fente 15 est à paroi lisse et présente une largeur, c'est-à-dire une dimension selon l'axe X, qui est strictement inférieure au diamètre du logement 14. - La branche 13 délimite quant à elle un trou traversant 16, à paroi lisse et reliant la surface latérale 13A à la face latérale de la branche 13, opposé à la branche 12. Ce trou traversant 16 s'étend selon l'axe Y, en étant centré sur l'axe Y1, comme bien visible sur les
figures 7 et 8 . - De plus, comme bien visible sur les
figures 3 et5 , les branches 12 et 13 délimitent des surfaces avant respectives 12B et 13B, qui sont inscrites dans un même plan perpendiculaire à l'axe X et qui, dans l'exemple considéré sur les figures, s'étendent sur une partie supérieure de ces branches. - Comme bien visible sur les
figures 3 et4 , la dent 20 comprend une tête avant 21 prolongée vers l'arrière par un corps 22, en conférant à la dent 20 une forme en « T » lorsqu'elle est observée selon l'axe Z. - Sur son côté avant, la tête 21 est conçue pour attaquer le terrain à creuser, par raclage pour en arracher des déblais. A cette fin, de manière connue en soi et non limitative de l'invention, l'avant de la tête 21 est rigidement pourvu d'inserts 23 en matériau dur, tel que du carbure, ou, plus généralement, d'éléments résistants fonctionnellement similaires en vue d'intensifier l'action de raclage de la dent 20 contre le front de taille.
- A l'arrière, la tête 21 délimite, de part et d'autre, selon l'axe Y, du corps 22, des surfaces arrières 21 A et 21 B, qui sont inscrites dans un même plan perpendiculaire à l'axe X et qui, dans l'exemple de réalisation considéré ici, occupent toute la face arrière de la tête 21 en dehors de l'emprise du corps 22. De même, comme indiqué sur les
figures 5 et 6 , la tête 21 délimite, sur son côté inférieur, une surface inférieure 21C, qui est inscrite dans un plan perpendiculaire à l'axe Z et qui, dans l'exemple de réalisation considéré ici, occupe une partie avant de la face inférieure de la tête. - Comme bien visible sur les
figures 3 ,4 et6 , le corps 22 est pourvu, à son extrémité arrière, d'un talon inférieur 24 qui, à la jonction avec le reste du corps 22, forme un coude tourné vers le bas. Le talon 24 délimite ainsi une surface avant 24A, qui est inscrite dans un plan perpendiculaire à l'axe X et qui, dans l'exemple de réalisation considéré ici, s'étend sur sensiblement toute la face avant du talon. - Le corps 22 délimite des surfaces latérales 22A et 22B, opposées l'une à l'autre selon l'axe Y, qui s'inscrivent chacune des plans perpendiculaires à l'axe Y et qui, dans l'exemple de réalisation considéré ici, occupent sensiblement toute l'étendue des faces latérales correspondantes du corps 22.
- Le support 10 et la dent 20 sont conformés pour être mis en prise l'un avec l'autre de manière à bloquer, à des jeux fonctionnels près, tout mouvement relatif entre eux excepté un mouvement vers le haut selon l'axe Z de la dent par rapport au support. Pour ce faire, comme représenté sur les
figures 2 et 5 à 8 , la dent 20 est conçue pour être montée sur le support 10 de manière que son corps 22 est reçu entre les branches 12 et 13 et sa tête 21 est reçue à l'avant de ces branches tandis que son talon 24 est reçu dans l'échancrure arrière de la base 11. Dans cet état monté de la dent 20 sur le support 10, la surface inférieure 21C de la tête 21 est en contact plan contre la surface supérieure 11 A de la base 11 de sorte que la dent est calée vers le bas selon l'axe Z par rapport au support 10. De plus, la distance, selon l'axe X, entre les surfaces arrières 21 A et 21 B de la tête 21 et la surface avant 24A du talon 24 est égale, à un jeu fonctionnel près, à la distance, selon l'axe X, entre la surface arrière 11 B de la base 11 et les surfaces avant 12B et 13B des branches 12 et 13 : à l'état monté de la dent 20 sur le support 10, les surfaces 24A, 21A et 21 B sont, au jeu précité près, en contact plan avec respectivement les surfaces 11 B, 12B et 13B de sorte que la dent 20 et le support 10 sont calés l'un par rapport à l'autre à la fois vers l'avant et vers l'arrière selon l'axe X, comme montré sur lesfigures 5 et 6 . Par ailleurs, la dimension, selon l'axe Y, du corps 22 est égale, à un jeu fonctionnel près, à l'écartement, selon cet axe Y, entre les branches 12 et 13 : à l'état monté de la dent 20 sur le support 10, les surfaces latérales 22A et 22B du corps 22 sont, au jeu précité près, en contact plan avec respectivement les surfaces latérales 12A et 13A des branches 12 et 13 de sorte que la dent 20 et le support 10 sont calés l'un par rapport à l'autre dans les deux directions, opposées l'une à l'autre, s'étendant selon l'axe Y. - Ainsi, à l'état monté de la dent 20 sur le support 10, la dent 20 et le support 10 coopèrent, dans toutes les directions de l'espace hormis vers le haut selon l'axe Z, par complémentarité de formes de manière à être liés fixement l'un à l'autre, par calage entre les surfaces 21 A, 21 B, 21C, 22A, 22B et 24A et les surfaces 11 A, 11 B, 12A, 13A, 12B et 13B. On comprend également qu'écarter la dent 20 du support 10 aux fins du démontage de la dent n'est possible que dans une direction de dégagement D, qui est rectiligne et orientée dans un sens, et qui, dans l'exemple considéré ici et comme indiqué par une flèche sur la
figure 4 , s'étend selon l'axe Z et est orientée vers le haut. - Par ailleurs, comme montré sur les
figures 3 ,7 et 8 , le corps 22 de la dent 20 délimite un trou traversant 25 qui s'étend selon l'axe Y, en reliant l'une à l'autre les surfaces latérales 22A et 22B. Ce trou 25 est centré sur un axe Y2 et est pourvu d'un taraudage 26 qui, dans l'exemple de réalisation considéré ici, s'étend sur toute la longueur axiale du trou 25. A l'état monté de la dent 20 sur le support 10, le trou 25 s'étend dans le prolongement, selon l'axe Y, du logement 14 et du trou 16 des branches 12 et 13, les axes Y1 et Y2 étant alors sensiblement confondus, comme montré sur lesfigures 7 et 8 . - Comme montré sur la
figure 3 , la vis 30 définit un axe longitudinal central Y3 qui, en service, s'étend selon l'axe Y. Cette vis 30 inclut de manière centrée sur l'axe Y3 : - à une extrémité longitudinale 30A, une tête 31 pourvue d'une empreinte de réception d'un outillage, non représenté, d'entrainement de la vis 30 en rotation sur elle-même autour de l'axe Y3 ;
- à son extrémité longitudinale opposée 30B, un pion 32 à surface lisse, en particulier non filetée ; et
- dans sa partie courante 30C, une tige 33 de liaison entre la tête 31 et le pion 32, qui est pourvue d'un filetage 34, s'étendant sur l'essentiel de cette tige, et qui présente un diamètre à la fois strictement inférieur à celui de la tête 31 et strictement supérieur à celui du pion 32.
- Le filetage 34 de la vis 30 est complémentaire du taraudage 26 de la dent 20, de sorte que, comme montré sur la
figure 4 , le trou 25 de la dent 20 est conçu pour recevoir de manière mobile la vis 30, par vissage-dévissage entre le filetage 34 et le taraudage 26, les axes Y2 et Y3 étant alors confondus. Ainsi, tout en restant solidaire de la dent 20, la vis 30 est déplaçable par rapport à la dent selon l'axe Y, moyennant son entrainement en rotation sur elle-même. - La vis 30 est prévue pour fixer la dent 20 au support 10, non pas dans le sens où cette vis 30 lierait rigidement l'un à l'autre la dent 20 et le support 10 en transmettant les efforts entre eux dans toutes les directions, mais dans le sens où la vis 30 est conçue pour bloquer la dent 20 par rapport au support 10 uniquement dans la direction de dégagement D, figeant ainsi l'état monté de la dent 20 sur le support 10. Pour ce faire, alors que la dent 20 est à l'état monté sur le support 10, la tête 31 de la vis 30 est conçue pour être reçue à l'intérieur du logement 14, ce dernier étant prévu complémentaire de la tête 31, et le pion 32 de la vis 30 est conçu pour être reçu dans le trou 16, ce dernier étant prévu complémentaire du pion 32 : par complémentarité de formes entre, d'une part, la tête 31 et le logement 14 et, d'autre part, le pion 32 et le trou 16, à des jeux fonctionnels près, la vis 30 est en interférence potentielle avec le support dans toutes les directions radiales aux axes Y1 et Y3 alors sensiblement confondus. Cependant, du fait de la mise en prise, par calage, entre le support 10 et la dent 20, décrite plus haut, la vis n'interfère mécaniquement avec le support 10 que dans la direction de dégagement D, c'est-à-dire vers le haut selon l'axe Z, cette interférence dans la direction de dégagement D étant d'ailleurs exclusivement entre la vis et le support dans le sens où, dans cette direction de dégagement D, le support et la dent ne sont pas en prise directe l'un avec l'autre.
- L'agencement relatif qui vient d'être décrit, entre le support 10, la dent 20 et la vis 30, correspond à une configuration montée de l'outil de creusement 4, illustrée par les
figures 2 et 5 à 7 : dans cette configuration montée, comme expliqué ci-dessus, la vis 30 entre en interférence avec le support 10 uniquement dans la direction de dégagement D pour bloquer la dent 20 par rapport au support, tandis que, dans les directions autres que cette direction de dégagement D, la dent est en prise mécanique directe avec le support. De cette façon, les efforts exercés sur la dent 20 lorsque l'outil 4 racle le front de taille contre lequel est appliquée la tête de coupe 2, sont transmis directement au support 10, sans transiter par la vis 30, excepté pour les efforts orientés rigoureusement dans la direction de dégagement D. On comprend que, sans pénaliser la fixation de la dent 20 au support 10 et, plus généralement, la fiabilité de l'outil de creusement 4, la vis 30, même prévue en un seul exemplaire au sein de cet outil de creusement, est suffisante, aucun moyen de fixation autre que cette unique vis n'étant avantageusement nécessaire. - Pour passer l'outil 4 de sa configuration montée à une configuration démontée, telle qu'illustrée sur les
figures 4 et8 , la vis 30 est, par entrainement de sa tête 21 à l'aide d'un outillage ad hoc non représenté, dévissée vis-à-vis de la dent 20 de manière à sortir, selon l'axe Y, la tête 31 du logement 14 et le pion 32 du trou 16. Ce dévissage de la vis 30 est poursuivi jusqu'à sortir en totalité la tête 31 du logement 14 et le pion 32 du trou 16, comme représenté sur lafigure 8 , sans pour autant extraire la vis 30 du trou taraudé 25 de la dent 20, en maintenant engagée une partie du filetage 34 avec une partie du taraudage 26. La dent 20 et la vis 30 peuvent alors être conjointement dégagées en totalité du support 10, en étant entrainées, manuellement ou par un outillage approprié, vers le haut selon l'axe Z, autrement dit, uniquement dans la direction de dégagement D, comme montré sur lafigure 4 . Bien entendu, pour que la vis 30 ne bloque pas le dégagement relatif entre le support 10 et l'ensemble constitué de la dent et de la vis 30, cette dernière ne doit pas interférer avec le support 10 dans la direction de dégagement D, ce qui passe par un dimensionnement ad hoc de sa fente 15, la largeur de cette fente, c'est-à-dire sa dimension selon l'axe X, étant supérieure, au moins à un jeu fonctionnel près, au diamètre de la tige 33, comme bien visible sur lafigure 5 . - Le passage de l'outil 4 de la configuration démontée à la configuration montée s'effectue de manière inverse à ce qui vient d'être décrit pour le passage de la configuration montée à la configuration démontée, moyennant, successivement, le montage complet de l'ensemble, constitué de la dent 20 et de la vis 30, sur le support 10 par entraînement de cet ensemble uniquement dans une direction opposée à la direction de dégagement D, puis le vissage de la vis 30, jusqu'à pénétration complète de sa tête 31 dans le logement 14 et de son pion 32 dans le trou 16. En pratique, ce vissage est mis en oeuvre jusqu'à mettre en butée, selon l'axe Y, la tête 31 contre le fond du logement 14. La poursuite de ce vissage est empêchée, à un jeu fonctionnel près, par calage, dans l'axe Y, de la surface 22A du corps 22 contre la surface 12A de la branche 12 du support 10, mais permet avantageusement de coincer la vis 30 du fait du serrage de la branche 12 entre la tête 31 de la vis et le corps 22 de la dent : le risque de dévissage inopiné de la vis 30 est ainsi limité puisqu'un effort de déblocage de la vis est nécessaire pour initier son dévissage aux fins de passer l'outil 4 en configuration démontée.
- Dans tous les cas, le passage de l'outil de creusement 4 entre ses configurations montée et démontée est réalisé simplement par vissage-dévisage de la vis 30, tout en la maintenant solidaire de la dent 20 : les manipulations correspondantes sont rapides et faciles à mettre en oeuvre, le cas échéant de manière automatique par un robot manipulateur, sans courir le risque de perdre la vis. De même, une fois que l'outil de creusement 4 est dans la configuration démontée, le dégagement complet, vis-à-vis du support 10, de la dent 20 et de la vis 30 qui y reste partiellement visée, tout comme le montage sur le support de cet ensemble constitué de la dent et de la vis, sont réalisés par entraînement de cet ensemble exclusivement de manière parallèle à la direction de dégagement D, respectivement dans le sens de cette direction de dégagement et dans le sens opposé : les manipulations respectives sont là encore rapides et faciles à mettre en oeuvre, le cas échéant de manière automatique par un robot manipulateur.
- Enfin, divers aménagements et variantes à l'outil de creusement 4 et au tunnelier 1, décrits jusqu'ici, sont par ailleurs envisageables. A titre d'exemples :
- plutôt que d'être traversant, le trou 16 peut être prévu borgne, en ne débouchant que sur la surface latérale 13A de la branche 13 ;
- pour faciliter la mise en place de l'ensemble, constitué de la dent 20 et de la vis 30, vis-à-vis du support 10, certaines arêtes du support, de la dent et /ou de la vis sont avantageusement chanfreinées ; dans l'exemple de réalisation représenté sur les figures, c'est le cas notamment pour l'arête supérieure des surfaces latérales 12A et 13A, l'arête inférieure des surfaces latérales 22A et 22B, l'arête supérieure de la surface arrière 11 B, l'arête inférieure de la surface avant 24A, l'arête supérieure des bords de la fente 15 et l'arête périphérique extrême du pion 32, ainsi que le pourtour du logement 14 et du trou 16 ; et/ou
- plutôt que d'être rigoureusement perpendiculaire comme dans l'exemple de réalisation considéré sur les figures, la direction de dégagement D peut, plus généralement, être transversale à l'axe central Y2 du trou taraudé 25.
Claims (10)
- Outil de creusement (4) pour un tunnelier (1), comprenant :- une dent (20) d'attaque du terrain à creuser,- un support (10) de montage de la dent, le support étant prévu pour être fixé à demeure à une tête de coupe (2) du tunnelier, le support et la dent étant conformés pour être mis en prise l'un avec l'autre de manière à lier fixement la dent avec le support dans toutes les directions de l'espace hormis dans une direction de dégagement (D), et- une vis (30) de fixation amovible de la dent au support, la vis étant pourvue d'un filetage (34) qui est vissé dans un taraudage (26) de la dent, la direction de dégagement (D) étant transversale à l'axe central (Y2) de ce taraudage,dans lequel, dans une configuration montée de l'outil de creusement (4), la dent (20) est en prise mécanique directe avec le support (10) dans les directions autres que la direction de dégagement (D) et la vis (30) interfère avec le support dans la direction de dégagement (D) pour bloquer la dent par rapport au support,
caractérisé en ce que le taraudage (26) de la dent (20) et le filetage (34) de la vis (30) sont conçus pour, par vissage-dévissage, maintenir la dent et la vis solidaires l'une de l'autre tout en passant l'outil de creusement (4) entre la configuration montée et une configuration démontée dans laquelle la vis n'interfère pas avec le support (10) dans la direction de dégagement (D) de sorte que, par entraînement uniquement dans la direction de dégagement, la dent et la vis sont dégagées du support, tandis que par entraînement uniquement dans une direction opposée à la direction de dégagement, la dent et la vis sont montées sur le support. - Outil de creusement suivant la revendication 1, caractérisé en ce que le filetage (34) de la vis (30) est situé dans la partie courante (30C) de la vis.
- Outil de creusement suivant l'une des revendications 1 ou 2, caractérisé en ce que, dans la configuration montée de l'outil de creusement (4), la vis (30) interfère avec le support (10) dans la direction de dégagement (D) au niveau des deux extrémités longitudinales opposées (30A, 30B) de la vis.
- Outil de creusement suivant la revendication 3, caractérisé en ce qu'une première (30A) des deux extrémités de la vis (30) forme une tête (31) d'entrainement de la vis en vissage-dévissage par rapport au taraudage (26) de la dent (20), cette tête étant reliée à la seconde extrémité (30B) de la vis par une tige (33) de la vis, dont le diamètre est strictement inférieur à celui de la tête, et
en ce que le support (10) délimite un logement (14) :- à l'intérieur duquel la tête (31) de la vis (30) est reçue de façon complémentaire dans la configuration montée de l'outil de creusement (4),- duquel la tête de la vis sort en totalité lors du dévissage de la vis pour passer l'outil de creusement de sa configuration montée à sa configuration démontée, et- qui est relié à une face extérieure du support (10) dans la direction de dégagement (D) par une fente (15) du support, dont la largeur est à la fois inférieure au diamètre de la tête (31) de la vis (30) et supérieure au diamètre de la tige (33) de la vis. - Outil de creusement suivant la revendication 4, caractérisé en ce que la fente (15) du support (10) relie également le logement (14) à une surface (12A), délimitée par le support, de calage de la dent (20) dans une direction parallèle à l'axe central (Y2) du taraudage (26).
- Outil de creusement suivant l'une des revendications 4 ou 5, caractérisé en ce que la seconde extrémité (30B) de la vis (30) forme un pion lisse (32), et
en ce que le support (10) délimite un trou lisse (16), à l'intérieur duquel le pion (32) de la vis (30) est reçu de façon complémentaire dans la configuration montée de l'outil de creusement (4), et duquel le pion de la vis sort en totalité lors du dévissage de la vis pour passer l'outil de creusement de sa configuration montée à sa configuration démontée. - Outil de creusement suivant l'une quelconque des revendications précédentes, caractérisé en ce que, dans la configuration montée de l'outil de creusement (4), la dent (20) et le support (10) sont, dans les directions autres que la direction de dégagement (D), en prise mécanique l'un avec l'autre par contact entre des surfaces de calage (11 A, 11 B, 12A, 12B, 13A, 13B, 21 A, 21 B, 21C, 22A, 22B, 24A) respectivement délimitées par la dent et le support.
- Outil de creusement suivant la revendication 7, caractérisé en ce que lesdites surfaces de calage incluent :- une surface (21 C) de la dent (20) et une surface (11 A) du support (10), qui, dans la configuration montée de l'outil de creusement (4), sont en contact l'une avec l'autre pour caler la dent par rapport au support dans la direction opposée à la direction de dégagement (D),- des surfaces (22A, 22B) de la dent (20) et des surfaces (12A, 13A) du support (10), qui, dans la configuration montée de l'outil de creusement, sont en contact les unes avec les autres pour caler la dent et le support l'un par rapport à l'autre dans les directions, opposées l'une à l'autre, qui sont parallèles à l'axe central (Y2) du taraudage (26), et- des surfaces (21 A, 21 B, 24A) de la dent (20) et des surfaces (12B, 13B, 11 B) du support (10), qui, dans la configuration montée de l'outil de creusement, sont en contact les unes avec les autres pour caler la dent et le support l'un par rapport à l'autre dans les directions, opposées l'une à l'autre, qui sont perpendiculaires, à la fois, à la direction de dégagement (D) et à l'axe central (Y2) du taraudage (26).
- Outil de creusement suivant l'une quelconque des revendications précédentes, caractérisé en ce que la vis (30) est prévue en un seul exemplaire, et en ce que l'outil de creusement (4) est dépourvu de tout autre moyen de fixation de la dent (20) au support (10) que cette vis unique.
- Tunnelier (1), comprenant :- une tête de coupe (2), et- au moins un outil de creusement (4), qui est conforme à l'une quelconque des revendications précédentes et dont le support (10) est fixé à demeure à la tête de coupe (2).
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PL16164220T PL3085886T3 (pl) | 2015-04-08 | 2016-04-07 | Narzędzie drążące dla kombajnu chodnikowego, jak również kombajn chodnikowy zawierający to narzędzie |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1553007A FR3034806A1 (fr) | 2015-04-08 | 2015-04-08 | Outil de creusement pour un tunnelier, ainsi que tunnelier comprenant un tel outil |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3085886A1 true EP3085886A1 (fr) | 2016-10-26 |
| EP3085886B1 EP3085886B1 (fr) | 2018-01-03 |
Family
ID=53274684
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP16164220.2A Not-in-force EP3085886B1 (fr) | 2015-04-08 | 2016-04-07 | Outil de creusement pour un tunnelier, ainsi que tunnelier comprenant un tel outil |
Country Status (9)
| Country | Link |
|---|---|
| EP (1) | EP3085886B1 (fr) |
| CN (1) | CN106050253A (fr) |
| AU (1) | AU2016202062B1 (fr) |
| DK (1) | DK3085886T3 (fr) |
| ES (1) | ES2664424T3 (fr) |
| FR (1) | FR3034806A1 (fr) |
| NO (1) | NO3085886T3 (fr) |
| PL (1) | PL3085886T3 (fr) |
| SG (1) | SG10201602756VA (fr) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112177623A (zh) * | 2020-09-27 | 2021-01-05 | 中铁隧道局集团有限公司 | 一种不同富水破碎程度地层隧道tbm分级施工方法 |
| CN112593963B (zh) * | 2020-12-07 | 2024-06-04 | 安徽唐兴装备科技股份有限公司 | 一种可刮土的滚刀刀盘 |
| CN113021392B (zh) * | 2021-03-26 | 2022-04-22 | 中煤科工集团重庆研究院有限公司 | 一种矿用内置活塞式机械爪 |
| CN112983449B (zh) * | 2021-04-19 | 2022-06-07 | 中国铁建重工集团股份有限公司 | 一种刀盘和基于钻爆施工的全断面硬岩掘进机及破岩方法 |
| CN113431598A (zh) * | 2021-08-09 | 2021-09-24 | 太原理工大学 | 一种具有新型刀具安装方式的小直径刀盘及隧道掘进机 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1253286A1 (fr) | 2001-04-24 | 2002-10-30 | NFM Technologies | Dispositif de fixation d'un outil de travail sur une machine de creusement de tunnels |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB218065A (en) * | 1923-05-09 | 1924-07-03 | Arthur James Wilkinson | Improvements in or relating to coal cutting machines |
| AT504281B1 (de) * | 2006-09-20 | 2010-08-15 | Voest Alpine Bergtechnik | Vollschnittstreckenvortriebsmaschine |
| EP2845997A1 (fr) * | 2013-09-06 | 2015-03-11 | Sandvik Intellectual Property AB | Ensemble de retenue de trépan tranchant |
| CN203756178U (zh) * | 2013-12-26 | 2014-08-06 | 江苏凯宫隧道机械有限公司 | 一种刀盘以及盾构机 |
| CN103742135B (zh) * | 2014-01-15 | 2016-09-07 | 上海安运输送设备有限公司 | 矿用全断面矩形快速掘进机 |
-
2015
- 2015-04-08 FR FR1553007A patent/FR3034806A1/fr not_active Withdrawn
-
2016
- 2016-04-04 AU AU2016202062A patent/AU2016202062B1/en not_active Ceased
- 2016-04-07 DK DK16164220.2T patent/DK3085886T3/en active
- 2016-04-07 SG SG10201602756VA patent/SG10201602756VA/en unknown
- 2016-04-07 PL PL16164220T patent/PL3085886T3/pl unknown
- 2016-04-07 NO NO16164220A patent/NO3085886T3/no unknown
- 2016-04-07 EP EP16164220.2A patent/EP3085886B1/fr not_active Not-in-force
- 2016-04-07 ES ES16164220.2T patent/ES2664424T3/es active Active
- 2016-04-08 CN CN201610217766.4A patent/CN106050253A/zh active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1253286A1 (fr) | 2001-04-24 | 2002-10-30 | NFM Technologies | Dispositif de fixation d'un outil de travail sur une machine de creusement de tunnels |
Also Published As
| Publication number | Publication date |
|---|---|
| NO3085886T3 (fr) | 2018-06-02 |
| DK3085886T3 (en) | 2018-03-12 |
| PL3085886T3 (pl) | 2018-05-30 |
| CN106050253A (zh) | 2016-10-26 |
| SG10201602756VA (en) | 2016-11-29 |
| EP3085886B1 (fr) | 2018-01-03 |
| ES2664424T3 (es) | 2018-04-19 |
| AU2016202062B1 (en) | 2016-06-16 |
| FR3034806A1 (fr) | 2016-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3085886B1 (fr) | Outil de creusement pour un tunnelier, ainsi que tunnelier comprenant un tel outil | |
| CA2697128C (fr) | Agrafage d'epinglage a vis et son utilisation pour la fixation temporaire d'une grille de percage sur des elements a assembler | |
| FR2587251A1 (fr) | Procede et appareil pour gratter la surface exterieure d'un tube | |
| FR2903334A1 (fr) | Outil a rochet | |
| EP0096622B1 (fr) | Procédé et dispositif pour le forage du sol | |
| FR2941641A1 (fr) | Couteau incluant un dispositif permettant sa transformation et son utilisation en outil a main. | |
| EP1702715B1 (fr) | Prolongateur pour ponceuse girafe | |
| BE1008200A3 (fr) | Dispositif de prise et de depose automatiques reversibles d'un outil de travail par le porte-outil d'une machine, notamment de terrassement et outil en faisant application. | |
| EP0249551A1 (fr) | Roue trancheuse, notamment pour le creusage de tranchées | |
| EP1005959B1 (fr) | Procédé de pose d'une embase de fixation de pièce et outil de fixation pour la mise en oeuvre du procédé | |
| FR2939160B1 (fr) | Godet couplable au bras d'un engin automoteur et ensemble d'outillage incluant un tel godet | |
| EP3012403B1 (fr) | Système de fixation d'un outil de coupe sur une tête de coupe de tunnelier et tunnelier comprenant un tel système de fixation | |
| FR2498672A1 (fr) | Procedes et outillage de forage, notamment de sondage de couches rocheuses, en utilisant un adaptateur directeur | |
| EP3284333B1 (fr) | Dispositif de montage/demontage d'au moins un marteau sur un rotor de machine agricole, et outil equipe d'un tel dispositif | |
| FR2742177A1 (fr) | Dispositif de raccord d'elements de forage de fondation et systeme equipe de ce dispositif | |
| FR2988025A1 (fr) | Dispositif d'aide au vissage de deux pieces et application au vissage d'une garniture sur la porte d'un vehicule automobile. | |
| CA2734453C (fr) | Debroussailleuse | |
| EP0102303A2 (fr) | Système de montage des secteurs porte-pics sur une roue de trancheuse ou tambour de fraise | |
| EP2684629B1 (fr) | Gabarit de perçage | |
| FR3039448A1 (fr) | Douille de vissage magnetique. | |
| EP1253286A1 (fr) | Dispositif de fixation d'un outil de travail sur une machine de creusement de tunnels | |
| EP1094197A1 (fr) | Ensemble d'outillage de pose et de dépose d'outils de travail d'une machine de creusement de tunnel | |
| FR3066934B1 (fr) | Dispositif de coupe rotatif | |
| EP4060124B1 (fr) | Ensemble de couplage securise d'un outil sur un bras de travail d'un engin de travaux publics a fonctionnement ameliore | |
| FR2732051A1 (fr) | Roue trancheuse |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20170331 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20170809 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 960453 Country of ref document: AT Kind code of ref document: T Effective date: 20180115 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602016001264 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 Effective date: 20180309 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: MICHELI AND CIE SA, CH |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 3 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2664424 Country of ref document: ES Kind code of ref document: T3 Effective date: 20180419 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DK Payment date: 20180322 Year of fee payment: 3 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20180103 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20180319 Year of fee payment: 3 |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: T2 Effective date: 20180103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20180409 Year of fee payment: 3 Ref country code: CZ Payment date: 20180320 Year of fee payment: 3 Ref country code: ES Payment date: 20180531 Year of fee payment: 3 Ref country code: NO Payment date: 20180327 Year of fee payment: 3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180403 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180503 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180404 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20180423 Year of fee payment: 3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20180413 Year of fee payment: 3 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602016001264 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 |
|
| 26N | No opposition filed |
Effective date: 20181005 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20180430 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180407 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180430 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180407 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20190430 Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190407 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602016001264 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: MMEP |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: EBP Effective date: 20190430 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190430 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190430 Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190408 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191101 Ref country code: NO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20160407 Ref country code: MK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180103 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180103 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20200828 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190408 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190407 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20200407 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: UEP Ref document number: 960453 Country of ref document: AT Kind code of ref document: T Effective date: 20180103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200407 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190430 |
|
| PGRI | Patent reinstated in contracting state [announced from national office to epo] |
Ref country code: FR Effective date: 20210218 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200407 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20220314 Year of fee payment: 7 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 960453 Country of ref document: AT Kind code of ref document: T Effective date: 20210407 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190407 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210407 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230430 |