EP3046434B1 - Footwear having a removable motorized adjustment system - Google Patents
Footwear having a removable motorized adjustment system Download PDFInfo
- Publication number
- EP3046434B1 EP3046434B1 EP14790802.4A EP14790802A EP3046434B1 EP 3046434 B1 EP3046434 B1 EP 3046434B1 EP 14790802 A EP14790802 A EP 14790802A EP 3046434 B1 EP3046434 B1 EP 3046434B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- footwear
- article
- tensile member
- motorized
- lace
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 41
- 238000000034 method Methods 0.000 claims description 29
- 239000011800 void material Substances 0.000 claims description 13
- 210000000452 mid-foot Anatomy 0.000 claims description 11
- 230000009467 reduction Effects 0.000 description 48
- 210000002683 foot Anatomy 0.000 description 43
- 238000004804 winding Methods 0.000 description 38
- 210000000474 heel Anatomy 0.000 description 37
- 239000000463 material Substances 0.000 description 16
- 230000008878 coupling Effects 0.000 description 13
- 238000010168 coupling process Methods 0.000 description 13
- 238000005859 coupling reaction Methods 0.000 description 13
- 230000033001 locomotion Effects 0.000 description 11
- 238000004891 communication Methods 0.000 description 10
- 210000004744 fore-foot Anatomy 0.000 description 10
- 230000006870 function Effects 0.000 description 9
- 230000000694 effects Effects 0.000 description 7
- 238000005516 engineering process Methods 0.000 description 7
- 238000013461 design Methods 0.000 description 6
- 230000001965 increasing effect Effects 0.000 description 6
- 230000000977 initiatory effect Effects 0.000 description 6
- 230000002093 peripheral effect Effects 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 230000000386 athletic effect Effects 0.000 description 5
- 230000006835 compression Effects 0.000 description 5
- 238000007906 compression Methods 0.000 description 5
- 230000003247 decreasing effect Effects 0.000 description 4
- 230000003993 interaction Effects 0.000 description 4
- 238000012544 monitoring process Methods 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 238000013519 translation Methods 0.000 description 4
- 230000000712 assembly Effects 0.000 description 3
- 238000000429 assembly Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 239000006260 foam Substances 0.000 description 3
- 238000002955 isolation Methods 0.000 description 3
- 238000005304 joining Methods 0.000 description 3
- 229920000642 polymer Polymers 0.000 description 3
- 230000002829 reductive effect Effects 0.000 description 3
- 210000003371 toe Anatomy 0.000 description 3
- 238000003466 welding Methods 0.000 description 3
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000017531 blood circulation Effects 0.000 description 2
- BFMKFCLXZSUVPI-UHFFFAOYSA-N ethyl but-3-enoate Chemical compound CCOC(=O)CC=C BFMKFCLXZSUVPI-UHFFFAOYSA-N 0.000 description 2
- 230000001976 improved effect Effects 0.000 description 2
- 230000001939 inductive effect Effects 0.000 description 2
- 239000010985 leather Substances 0.000 description 2
- 239000002649 leather substitute Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000036961 partial effect Effects 0.000 description 2
- 230000001681 protective effect Effects 0.000 description 2
- 239000004753 textile Substances 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 229910001369 Brass Inorganic materials 0.000 description 1
- WHXSMMKQMYFTQS-UHFFFAOYSA-N Lithium Chemical compound [Li] WHXSMMKQMYFTQS-UHFFFAOYSA-N 0.000 description 1
- 239000004677 Nylon Substances 0.000 description 1
- 241001417527 Pempheridae Species 0.000 description 1
- 229920005830 Polyurethane Foam Polymers 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000004026 adhesive bonding Methods 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 210000003423 ankle Anatomy 0.000 description 1
- 230000003466 anti-cipated effect Effects 0.000 description 1
- 230000037147 athletic performance Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000010951 brass Substances 0.000 description 1
- 210000000459 calcaneus Anatomy 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000009194 climbing Effects 0.000 description 1
- 230000002860 competitive effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000011217 control strategy Methods 0.000 description 1
- 125000004122 cyclic group Chemical group 0.000 description 1
- 238000013480 data collection Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 239000002657 fibrous material Substances 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 239000006261 foam material Substances 0.000 description 1
- 239000011121 hardwood Substances 0.000 description 1
- 238000003306 harvesting Methods 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 239000010410 layer Substances 0.000 description 1
- 229910052744 lithium Inorganic materials 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 210000001872 metatarsal bone Anatomy 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 238000011022 operating instruction Methods 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 239000002861 polymer material Substances 0.000 description 1
- 239000004814 polyurethane Substances 0.000 description 1
- 239000011496 polyurethane foam Substances 0.000 description 1
- 230000036316 preload Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 230000008961 swelling Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 229920000785 ultra high molecular weight polyethylene Polymers 0.000 description 1
Images
































Classifications
-
- A—HUMAN NECESSITIES
- A43—FOOTWEAR
- A43B—CHARACTERISTIC FEATURES OF FOOTWEAR; PARTS OF FOOTWEAR
- A43B11/00—Footwear with arrangements to facilitate putting-on or removing, e.g. with straps
-
- A—HUMAN NECESSITIES
- A43—FOOTWEAR
- A43B—CHARACTERISTIC FEATURES OF FOOTWEAR; PARTS OF FOOTWEAR
- A43B3/00—Footwear characterised by the shape or the use
- A43B3/34—Footwear characterised by the shape or the use with electrical or electronic arrangements
- A43B3/38—Footwear characterised by the shape or the use with electrical or electronic arrangements with power sources
-
- A—HUMAN NECESSITIES
- A43—FOOTWEAR
- A43B—CHARACTERISTIC FEATURES OF FOOTWEAR; PARTS OF FOOTWEAR
- A43B3/00—Footwear characterised by the shape or the use
- A43B3/34—Footwear characterised by the shape or the use with electrical or electronic arrangements
- A43B3/44—Footwear characterised by the shape or the use with electrical or electronic arrangements with sensors, e.g. for detecting contact or position
-
- A—HUMAN NECESSITIES
- A43—FOOTWEAR
- A43C—FASTENINGS OR ATTACHMENTS OF FOOTWEAR; LACES IN GENERAL
- A43C11/00—Other fastenings specially adapted for shoes
- A43C11/16—Fastenings secured by wire, bolts, or the like
- A43C11/165—Fastenings secured by wire, bolts, or the like characterised by a spool, reel or pulley for winding up cables, laces or straps by rotation
Definitions
- the present embodiments relate generally to articles of footwear and including removable motorized adjustment systems.
- Articles of footwear generally include two primary elements: an upper and a sole structure.
- the upper is often formed from a plurality of material elements (e.g., textiles, polymer sheet layers, foam layers, leather, synthetic leather) that are stitched or adhesively bonded together to form a void on the interior of the footwear for comfortably and securely receiving a foot. More particularly, the upper forms a structure that extends over instep and toe areas of the foot, along medial and lateral sides of the foot, and around a heel area of the foot.
- the upper may also incorporate a lacing system to adjust the fit of the footwear, as well as permitting entry and removal of the foot from the void within the upper.
- some articles of apparel may include various kinds of closure systems for adjusting the fit of the apparel.
- WO 01/15559 A1 relates to a footwear lacing system, which comprises a tightening mechanism used for tightening the lace of the footwear.
- the footwear comprises a number of guide members through which the lace is threaded.
- the lace and the guide members have low friction.
- US 5 157 813 A describes a shoelace tensioning device, which is mounted on the top of a shoe and which is has a hook mechanism wound onto a drum within the device for tensioning of the shoelace ends.
- the problem relates to improving operability of lacing of an article of footwear.
- the invention relates to an article of footwear as specified in appended independent claim 1, a method of changing a lacing system of an article of footwear as specified in appended independent claim 12, and a motorized footwear lacing system as specified in appended independent claim 14.
- Preferred embodiments of the invention are disclosed in the dependent claims.
- longitudinal refers to a direction extending a length of a component.
- a longitudinal direction of an article of footwear extends from a forefoot region to a heel region of the article of footwear.
- forward is used to refer to the general direction in which the toes of a foot point, and the term “rearward” is used to refer to the opposite direction, i.e., the direction in which the heel of the foot is facing.
- lateral direction refers to a side-to-side direction extending a width of a component.
- the lateral direction may extend between a medial side and a lateral side of an article of footwear, with the lateral side of the article of footwear being the surface that faces away from the other foot, and the medial side being the surface that faces toward the other foot.
- side refers to any portion of a component facing generally in a lateral, medial, forward, or rearward direction, as opposed to an upward or downward direction.
- vertical refers to a direction generally perpendicular to both the lateral and longitudinal directions. For example, in cases where a sole is planted flat on a ground surface, the vertical direction may extend from the ground surface upward. It will be understood that each of these directional adjectives may be applied to individual components of a sole.
- upward refers to the vertical direction heading away from a ground surface, while the term “downward” refers to the vertical direction heading towards the ground surface.
- top refers to the portion of an object substantially furthest from the ground in a vertical direction
- bottom refers to the portion of an object substantially closest to the ground in a vertical direction
- the "interior” of a shoe refers to space that is occupied by a wearer's foot when the shoe is worn.
- the “inner side” of a panel or other shoe element refers to the face of that panel or element that is (or will be) oriented toward the shoe interior in a completed shoe.
- the “outer side” or “exterior” of an element refers to the face of that element that is (or will be) oriented away from the shoe interior in the completed shoe.
- the inner side of an element may have other elements between that inner side and the interior in the completed shoe.
- an outer side of an element may have other elements between that outer side and the space external to the completed shoe.
- the terms “inward” and “inwardly” shall refer to the direction toward the interior of the shoe, and the terms “outward” and “outwardly” shall refer to the direction toward the exterior of the shoe.
- the foregoing directional terms when used in reference to an article of footwear, shall refer to the article of footwear when sitting in an upright position, with the sole facing groundward, that is, as it would be positioned when worn by a wearer standing on a substantially level surface.
- fixedly attached shall refer to two components joined in a manner such that the components may not be readily separated (for example, without destroying one or both of the components).
- exemplary modalities of fixed attachment may include joining with permanent adhesive, rivets, stitches, nails, staples, welding or other thermal bonding, or other joining techniques.
- two components may be "fixedly attached” by virtue of being integrally formed, for example, in a molding process.
- removable attachment shall refer to the joining of two components in a manner such that the two components are secured together, but may be readily detached from one another.
- removable attachment mechanisms may include hook and loop fasteners, friction fit connections, interference fit connections, threaded connectors, cam-locking connectors, and other such readily detachable connectors.
- a motorized footwear lacing system may include an article of footwear, a manual lace, and a motorized tensioning system.
- the motorized tensioning system includes a tensile member and a motorized tightening device that are removable and interchangeable with the manual lace.
- the lacing system may be provided as a kit of parts, including a container in which a pair of footwear, a pair of motorized tensioning systems, and a pair of manual laces may be provided.
- the motorized tightening device may be removably attached to the heel portion of the article of footwear.
- the tensile member may include a cord or other lace-like member that attaches to the motorized tightening device.
- the cord may be laced through eye stays in a lacing region of the article of footwear. Accordingly, when the motorized tightening device and the tensile member are removed from the footwear, the manual lace may be laced into the same eye stays in which the tensile member is used.
- the motorized tensioning system enables relatively rapid tightening of the footwear.
- the tightening system may provide incremental tightening. Such incremental tightening may enable the user to achieve a predictable tightness for each wearing.
- sensors may be included to monitor tightness. In such embodiments, the user may also achieve a predictable tightness.
- using a motorized tensioning device may remove dexterity issues that may occur with other tensioning technologies (pulling straps, Velcro, and other such manual closure systems).
- Such a design could improve the use of footwear for physically impaired or injured individuals who may otherwise have a hard time putting on and adjusting their footwear.
- footwear could be tightened via a push button or remote interface.
- the tensioning system may be remotely controlled, for example by a bracelet or hand-held device.
- adjustments may be made without the wearer having to stop the activity in which they are participating. For example, a distance runner may adjust the tightness of their footwear without interrupting their workout or competitive event.
- the tensioning system may also be configured to make automatic adjustments.
- the system may be configured to maintain tightness during wear by adjusting tightness according to changes in the fit. For example, as feet swell during wear, the tensioning system may release tension on the tensile member, in order to maintain the initially selected tightness.
- the tensioning system may be configured to adjust the tightness during use to improve performance. For example, as a wearer places loads on the footwear during an athletic activity, the system may tighten or loosen the tensile members to achieve desired performance characteristics. For example, as a runner proceeds around a curve, the tensioning system may tighten the footwear in order to provide additional stability and maintain the foot in a centralized position within the footwear. As another example, when a runner is running downhill, the tightening system may loosen the footwear to limit additional forces exerted on the foot as the foot tends to slide toward the front of the footwear during the downhill run. Numerous other automated adjustments may be utilized for performance. Such automated adjustments may vary for each activity.
- the type and amount of such adjustments may be preselected by the user. For instance, using the examples above, the user may select whether to tighten or loosen the footwear while proceeding around a curve. In addition, the user may select whether to utilize an automated adjustment at all during certain conditions. For example, the user may choose to implement the adjustment while proceeding around curves, but may opt not to utilize an adjustment when running downhill.
- Providing the motorized tensioning system as removable from the article of footwear may enable the footwear to be used conventionally.
- removability of the tensioning system may enable components of the tensioning system to be repaired or replaced independent of the footwear.
- removability of the tensioning system enables the footwear to be repaired or replaced independent of the tensioning system.
- FIG. 1 illustrates a motorized footwear lacing system 1100.
- system 1100 is a kit of parts.
- the kit of parts includes a container 1105 configured to store components of the motorized footwear lacing system 1100.
- System 1100 includes a first article of footwear 1100.
- System 1100 also includes a first manual lace 1116 configured to be laced into footwear 1110 in a conventional manner. Lace 1116 may be utilized to modify the dimensions of interior void 1165, thereby securing the foot of a wearer within interior void 1165 and facilitating entry and removal of the foot from interior void 1165.
- System 1100 includes a first motorized tensioning system 1120, which includes a first tensile member and a first motorized tightening device 1125 configured to apply tension in the tensile member to adjust the size of an internal void defined by footwear 1110.
- the tensile member is provided in sections.
- the tensile member includes a first tensile member portion 1130, associated with tightening device 1125 and extending through motorized tightening device 1125, as shown in FIG. 1 .
- the tensile member includes a second tensile member portion 1135, which is configured to be releasably attached to first tensile member portion 1130.
- the tensile member may include a third tensile member portion 1136, which may be attachable to first tensile member portion 1130.
- Second tensile member portion 1135 and third tensile member portion 1136 may be laced into footwear 1110, and thus, replace manual lace 1116. Once second tensile member portion 1135 and third tensile member portion 1136 are laced into footwear 1110, second tensile member portion 1135 may be releasably fastened to third tensile member portion 1136.
- Motorized tightening device 1125 and the tensile member are removably attached to footwear 1110.
- manual lace 1116 may be interchangeable with the tensile member and motorized tightening device 1125.
- system 1100 may include a pair of footwear and thus may include a second article of footwear 1111. Further, since system 1100 may include a pair of footwear, the other components of system 1100 may also be provided in pairs. For example, system 1100 may include a second manual lace 1115. In addition, system 1100 may include a second motorized tensioning system 1121. Second motorized tensioning system 1121 may include a second motorized tensioning device 1126. Second motorized tensioning system 1121 may also include a second tensile member, including a fourth tensile member portion 1131, a fifth tensile member portion 1140, and a sixth tensile member portion 1141. For purposes of description, only one of each pair of components will be discussed in detail below.
- motorized footwear lacing system 1100 may include a remote device 1145 configured to control motorized tightening device 1125.
- remote device 1145 may be provided in the form of a bracelet, as shown in FIG. 1 .
- remote device 1145 may be implemented as a function of a watch.
- remote device 1145 may be a hand-held device.
- remote device 1145 may be implemented as a function of a mobile telephone or other mobile device.
- Container 1105 may be configured to contain the pair of footwear, the pair of manual laces, and the pair of motorized tensioning systems, including the tensile members and the pair of motorized tightening devices. As shown in FIG. 1 , in some embodiments, container 1105 may be a box, such as a shoe box.
- FIG. 2 illustrates the association between tensioning system 1120 and footwear 1110.
- footwear 1110 may be divided into three general regions: a forefoot region 10, a midfoot region 12, and a heel region 14.
- Forefoot region 10 generally includes portions of footwear 1110 corresponding with the toes and the joints connecting the metatarsals with the phalanges.
- Midfoot region 12 generally includes portions of footwear 1110 corresponding with an arch area of the foot.
- Heel region 14 generally corresponds with rear portions of the foot, including the calcaneus bone.
- Forefoot region 10, midfoot region 12, and heel region 14 are not intended to demarcate precise areas of footwear 1110. Rather, forefoot region 10, midfoot region 12, and heel region 14 are intended to represent general relative areas of footwear 1110 to aid in the following discussion. Since various features of footwear 1110 extend beyond one region of footwear 1110, the terms forefoot region 10, midfoot region 12, and heel region 14 apply not only to footwear 1110, but also to the various features of footwear 1110.
- Footwear 1110 may include a sole structure 1150 and an upper 1155 secured to sole structure 1150.
- upper 1155 may include one or more material elements (for example, meshes, textiles, foam, leather, and synthetic leather), which may be joined to define an interior void 1165 configured to receive a foot of a wearer.
- the material elements may be selected and arranged to selectively impart properties such as light weight, durability, air-permeability, wear-resistance, flexibility, and comfort.
- Upper 1155 may define a throat opening 1160 through which a foot of a wearer may be received into void 1165.
- Sole structure 1150 may be fixedly attached to upper 1155 (for example, with adhesive, stitching, welding, or other suitable techniques) and may have a configuration that extends between upper 1155 and the ground. Sole structure 1150 may include provisions for attenuating ground reaction forces (that is, cushioning and stabilizing the foot during vertical and horizontal loading). In addition, sole structure 1150 may be configured to provide traction, impart stability, and control or limit various foot motions, such as pronation, supination, or other motions.
- sole structure 1150 may vary significantly according to one or more types of ground surfaces on which sole structure 1155 may be used.
- the disclosed concepts may be applicable to footwear configured for use on any of a variety of surfaces, including indoor surfaces or outdoor surfaces.
- the configuration of sole structure 11150 may vary based on the properties and conditions of the surfaces on which footwear 1110 is anticipated to be used.
- sole structure 1150 may vary depending on whether the surface is harder or softer.
- sole structure 1150 may be tailored for use in wet or dry conditions.
- sole structure 1150 may be configured for a particularly specialized surface or condition.
- footwear 1110 is illustrated in the accompanying figures as a running shoe and, accordingly, the illustrated sole structure 1150 is configured for providing cushioning, stability, and traction on hard, smooth surfaces, such as pavement.
- the proposed footwear upper construction may be applicable to any kind of footwear, however, such as basketball, soccer, football, and other athletic activities.
- sole structure 1150 may be configured to provide traction and stability on hard indoor surfaces (such as hardwood), soft, natural turf surfaces, or on hard, artificial turf surfaces.
- sole structure 1150 may be configured for use on a multiple different surfaces.
- sole structure 1150 may include multiple components, which may individually or collectively provide footwear 1110 with a number of attributes, such as support, rigidity, flexibility, stability, cushioning, comfort, reduced weight, or other attributes.
- sole structure 1150 may include an insole/sockliner (See FIG. 46 ), a midsole 1151, and a ground-contacting outer sole member 1152, which may have an exposed, ground-contacting lower surface 1153, as shown in FIG. 2 . In some cases, however, one or more of these components may be omitted.
- the insole may be disposed in void 1165 defined by upper 1155.
- the insole may extend through each of forefoot region 10, midfoot region 12, and heel region 14, and between a lateral side and medial side of footwear 1110.
- the insole may be formed of a deformable (for example, compressible) material, such as polyurethane foams, or other polymer foam materials. Accordingly, the insole may, by virtue of its compressibility, provide cushioning, and may also conform to the foot in order to provide comfort, support, and stability.
- Midsole 1151 may be fixedly attached to a lower area of upper 1155 (for example, through stitching, adhesive bonding, thermal bonding (such as welding), or other techniques), or may be integral with upper 1155.
- Midsole 1151 may extend through each of forefoot region 10, midfoot region 12, and heel region 14, and between a lateral side and medial side of footwear 100.
- portions of midsole 1151 may be exposed around the periphery of footwear 1110, as shown in FIG. 2 .
- midsole 1151 may be completely covered by other elements, such as material layers from upper 1155.
- Midsole 1151 may be formed from any suitable material having the properties described above, according to the activity for which footwear 1110 is intended.
- midsole 160 may include a foamed polymer material, such as polyurethane (PU), ethyl vinyl acetate (EVA), or any other suitable material that operates to attenuate ground reaction forces as sole structure 1150 contacts the ground during walking, running, or other ambulatory activities.
- PU polyurethane
- EVA ethyl vinyl acetate
- footwear 1110 may include a tongue 2270, which may be provided in a lacing region 1175.
- lacing region 1175 may be provided in an instep region of footwear 1110, as shown in FIG. 2 .
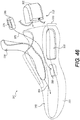
- the lacing region may be provided in other portions of the article of footwear. (See FIGS. 48 and 49 .)
- footwear 1110 may include a plurality of eye stays in lacing region 1175 configured to receive a lace.
- footwear 1110 may include a first eye stay 1181, a second eye stay 1182, a third eye stay 1183, and a fourth eye stay 1184 on a first side of lacing region 1175.
- footwear 1110 may include a fifth eye stay 1185, a sixth eye stay 1186, a seventh eye stay 1187, and an eighth eye stay 1188 on a second side of lacing region 1175.
- the eye stays are illustrated schematically in FIG. 2 , and may have any suitable configuration that will accept a conventional shoelace as well as the tensile member of tensioning system 1120.
- FIG. 2 schematically illustrates the placement of motorized tensioning system 1120 when removably attached to footwear 1110.
- tensioning system 1120 may be removably attached to heel region 14 of footwear 1110.
- Motorized tightening device 1125 may be disposed in a housing 1190, which may have a shape that conforms with the heel counter of footwear 1110.
- housing 1190 may have a first surface 1127 configured to mate with a second surface 1128 on upper 1155 of footwear 1110.
- first surface 1127 and second surface 1128 may be removably attached with a hook and loop fastener material 1129.
- first surface 1127 and second surface 1128 may be removably attached with a tongue and groove configuration, including a tongue 2300 and groove 2305.
- Tongue 2300 and groove 2305 are shown oriented in a substantially horizontal position for purposes of illustration. As implemented, tongue 2300 and groove 2305 may be oriented vertically. In such a vertical orientation, housing 1190 may be slid vertically into position.
- first surface 1127 and second surface 1128 may be removably attached with an interference fit or friction fit.
- a first protruding portion 2310 may extend into a recess 2315 in an interference fit.
- the components of such a friction fit attachment may have any suitable orientation.
- first surface 1127 or second surface 1128 may be disposed on either first surface 1127 or second surface 1128.
- the hook component of the hook and loop fastener 1129 may be located on either first surface 1127 or second surface 1128.
- the loop component of hook and loop fastener 1129 may be disposed on the opposing surface to the hook component.
- tongue 2300 may be located on either first surface 1127 or second surface 1128 and groove 2305 may be located on the opposing surface from tongue 2300.
- protruding portion 2310 may be located on either first surface 1127 or second surface 1128 and recess 2315 may be located on the opposing surface from protruding portion 2310.
- the tensile member may be laced through the eyelets in lacing region 1175, in the same or similar manner as a manual lace.
- third tensile member portion 1135 may be threaded through fifth eyelet 185, second eyelet 182, seventh eyelet 1187, and fourth eyelet 1184.
- fourth tensile member portion 1136 may be threaded through first eyelet 1181, sixth eyelet 1186, third eyelet 1183, and eighth eyelet 1188.
- third tensile member portion 1135 and fourth tensile member portion 1136 may be detachable from first tensile member portion 1130, third tensile member portion 1135 and fourth tensile member portion 1136 may be laced through the eyelets from either end.
- the mechanical connectors connecting the portions of the tensile member together are shown schematically and are shown enlarged for purposes of illustration.
- a coupling 1235 at the distal ends of third tensile member portion 1135 an fourth tensile member portion 1136 may include a first connector portion 1240 and a second connector portion 1245.
- First connector portion 1240 and second female portion 1245 may be sized and configured to be laced through the eyelets in lacing region 1175.
- a method of changing the lacing system of footwear 1110 may include removing the tensile member, motorized tightening device 1125, and a power source from the article of footwear and lacing a manual lace into footwear 1110.
- lacing a manual lace into the article of footwear includes lacing the manual lace into the eye stays from which the tensile member of system 1120 was removed.
- the step of removing motorized tightening device 1125 from footwear 1110 may include detaching housing 1190 from upper 1155 of footwear 1110.
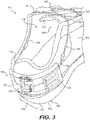
- FIG. 3 is a rear perspective view of article of footwear 1110 with tensioning system 1120 removably installed.
- housing 1190 is removably attached to a heel portion of footwear 1110.
- third tensile member portion 1135 and fourth tensile member portion 1136 are laced into the eye stays, including first eye stay 1181, second eye stay 1182, fifth eye stay 1185, and sixth eye stay 1186.
- the remainder of the lacing region has been truncated in FIG. 3 for purposes of illustration.
- tensioning system 1120 may include motorized tightening device 1125 configured to apply tension in the tensile member to adjust the size of internal void 1165 defined by footwear 1110. Tightening device may be disposed within housing 1190.
- system 1120 may include a power source 1205 configured to supply power to motorized tightening device 1125.
- Housing 1190 may be configured to house motorized tightening device 1125 and power source 1205, as well as first tensile member portion 1130.
- power source 1205 may include one or more batteries.
- Power source 1205 is only intended as a schematic representation of one or more types of battery technologies that could be used to power motorized tightening device 1125.
- One possibly battery technology that could be used is a lithium polymer battery.
- the battery (or batteries) could be rechargeable or replaceable units packaged as flat, cylindrical, or coin shaped.
- batteries could be single cell or cells in series or parallel.
- Rechargeable batteries could be recharged in place or removed from an article for recharging.
- charging circuitry could be built in and on board.
- charging circuitry could be located in a remote charger.
- inductive charging could be used for charging one or more batteries.
- a charging antenna could be disposed in a sole structure of an article and the article could then be placed on a charging mat to recharge the batteries.
- Additional provisions could be incorporated to maximize battery power and/or otherwise improve use.
- batteries could be used in combination with super caps to handle peak current requirements.
- energy harvesting techniques could be incorporated which utilize the weight of the runner and each step to generate power for charging a battery.
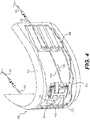
- FIG. 4 is a rear perspective view of motorized tensioning system 1120.
- FIG. 4 includes a cutaway view of housing 1190 exposing components of system 1120 located within housing 1190.
- FIG. 4 shows motorized tightening device 1125.
- FIG. 4 shows an outer housing of tightening device 1125.
- the inner winding mechanisms of tightening device 1125 are discussed in greater detail below.
- tightening device 1125 may be configured to apply tension to the tensile member by drawing first tensile member portion 1130 into tightening device 1125, as illustrated by a first arrow 1225 and a second arrow 1230. It will be noted that the routing of first tensile member portion 1130 is merely schematic, and more complicated arrangements for such routing are possible.
- Control unit 1215 may include various circuitry components.
- control unit 1215 may include a processor, configured to control motorized tightening device 1125.
- tensioning system 1120 may include a first electrical cable 1210 extending between power source 1205 and motorized tightening device 1125.
- a second electrical cable 1220 may extend between control unit 1215 and tightening device 1125.
- First electrical cable 1210 and second electrical cable 1220 may be configured to deliver electrical power, as well as electronic communication signals, between power source 1205, tightening device 1125, and control unit 1215.
- Control unit 1215 is only intended as a schematic representation of one or more control technologies that could be used with motor tightening device 1125.
- motor control there are various approaches to motor control that may be employed to allow speed and direction control.
- a microcontroller unit may be used.
- the microcontroller may use internal interrupt generated timing pulses to create pulse-width modulation (PWM) output.
- PWM pulse-width modulation
- This PWM output is fed to an H-bridge which allows high current PWM pulses to drive the motor both clockwise and counterclockwise with speed control.
- any other methods of motor control known in the art could also be used.
- FIG. 5 is a schematic top view of tensioning system 1120 installed on footwear 1110.
- housing 1190 may be configured to be removably attached to a heel portion of footwear 1110.
- tightening device 1125, power source 1205, and control unit 1215 may be housed within housing 1190, which may function to receive and protect these components.
- motorized tensioning device 1125 may be disposed in a rearmost portion of footwear 1110. This positioning may facilitate the application of tension to tensile members on both a medial side 1260 and a lateral side 1265 of footwear 1110.
- any of these components could be disposed in any other portions of an article, including the upper and/or sole structure. In some cases, some components could be disposed in one portion of an article and other components could be disposed in another, different, portion.
- motorized tensioning device 1125 could be disposed at the heel of an upper, while power source 1205 and/or control unit 1215 could be disposed with a sole structure of footwear 1110.
- the power source and control unit may be disposed under midfoot region 12 of article 1110 with a cable connection (or a simple electrical contact connection) to motorized tensioning device 1125, which may be disposed in heel region 14.
- a power source and a control unit could be integrated into a motorized tensioning device.
- both a battery and a control unit could be disposed within an outer housing of motorized tensioning device 1125.
- housing 1190 may be configured to wrap at least partially around medial side 1260 and lateral side 1265 of the heel portion of footwear 1110, as also shown in FIG. 5 .
- control unit 1215 is shown on medial side 1260 in heel region 14 of footwear 1110.
- Power source 1205 is shown on lateral side 1265 in heel region 14 of footwear 1110.
- the positions of control unit 1215 and power source 1205 may be reversed in some embodiments.
- FIG. 6 is a partial view of lacing region 1175 of footwear 1110 with the tensile member of the tensioning system installed.
- third tensile member portion 1135 is laced through seventh eyelet 1187 and fourth eyelet 1184.
- fourth tensile member portion 1136 is laced through third eyelet 1183 and eighth eyelet 1188.
- the tensile member may include a manual release mechanism for manually decoupling third tensile member portion 1135 from a fourth tensile member portion 1136.
- a coupling 1235 may include first connector portion 1240 at the distal end of third tensile member portion 1135, and second connector portion 1245 at the distal end of fourth tensile member portion 1135.
- the manual release mechanism such as coupling 1235, may be located in an instep region of footwear 1110.
- Coupling 1235 may be a readily decoupled manually, in order to enable removal of the tensile member from the article of footwear. Such manual decoupling may facilitate removal of the motorized tensioning system from footwear 1110. This manual release mechanism may also enable the tension in the tensile member to be released in the event of a malfunction or low battery power.
- Exemplary manual release mechanisms may include any suitable connector types.
- threaded connections may be utilized.
- first connector portion 1240 may include a male threaded portion and second connector portion 1245 may include a female threaded portion.
- first connector portion 1240 and second connector portion 1245 may be twisted, for example in the directions of a first arrow 1250 and a second arrow 1255. While FIG. 6 illustrates a threaded coupling, in other embodiments the tensile member could utilized any other fastening provisions including a snap fit connector, a hook and receiver type connector, or any other kinds of manual fasteners known in the art.
- FIG. 7 illustrates an embodiment of an exemplary manual release system for tensile members.
- article 1000 may be similar to previous embodiments and can include a tensioning system 1002 with a lace 1004 and a motorized tensioning device 1006.
- a portion of lace 1004 is equipped with a manual release mechanism 1010.
- manual release mechanism 1010 includes corresponding fasteners 1012 that can be manually disconnected to relieve lace tension.
- fasteners 1012 comprise a threaded coupling, as shown in FIG. 7 .
- other embodiments could utilized any other fastening provisions including a snap fit connector, a hook and receiver type connector, or any other kinds of fasteners known in the art.
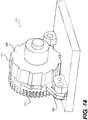
- FIGS. 8 and 9 illustrate an isometric view and isometric exploded view, respectively, of an embodiment of the internal components of motorized tensioning device 160.
- Housing unit 212 may further include an inner housing portion 216 and an outer housing portion 218.
- Outer housing portion 218 may include a base panel 210 as well as an outer cover 214, and generally provides a protective outer covering for components of motorized tensioning device 160.
- Inner housing portion 216 may be shaped to support components of motorized tensioning device 160. In some cases, portions of inner housing portion 216 function to limit the mobility of some components, as discussed in detail below.
- motorized tensioning system 160 may comprise motor 220 (shown schematically in FIG. 9 ).
- motor 220 may be an electric motor.
- motor 220 could comprise any kind of non-electric motor known in the art.
- Motors examples include, but are not limited to: DC motors (such as permanent-magnet motors, brushed DC motors, brushless DC motors, switched reluctance motors, etc.), AC motors (such as motors with sliding rotors, synchronous electrical motors, asynchronous electrical motors, induction motors, etc.), universal motors, stepper motors, piezoelectric motors, as well as any other kinds of motors known in the art.
- Motor 220 may further include a motor crankshaft 222 that can be used to drive one or more components of motorized tensioning system 160. Provisions for powering motor 220, including various kinds of batteries, are discussed in detail below.
- motorized tensioning system 160 can include provisions for reducing the output speed of, and increasing the torque generated by, motor 220.
- motorized tensioning system 160 can include one or more gear reduction assemblies and/or gear reduction systems.
- motorized tensioning system 160 may include a single gear reduction assembly.
- motorized tensioning system 160 may include two or more gear reduction assemblies.
- motorized tensioning system 160 includes first gear reduction assembly 230 and second gear reduction assembly 232, which may be collectively referred to as gear reduction system 228.
- First gear reduction assembly 230 may be an in-line spur gear reduction assembly that is generally aligned with motor 220 and/or crankshaft 222.
- second gear reduction assembly 232 may provide additional gear reduction that extends in a generally perpendicular direction to the orientation of crankshaft 222.
- first gear reduction assembly 230 may extend in a longitudinal direction of housing unit 212 while second gear reduction assembly 232 may extend in a lateral (or horizontal) direction of housing unit 212.
- motor 220 can be arranged in parallel with a spool and corresponding spool shaft (as discussed in further detail below). This arrangement may reduce the longitudinal space required to fit all the components of motorized tensioning device 160 within housing unit 212.
- Each gear reduction assembly can comprise one or more gears.
- first gear reduction assembly 230 comprises one or more in-line spur gears.
- first gear reduction assembly 230 may be driven by crankshaft 222 and itself drives a first gear 234 of second gear reduction assembly 232.
- second gear reduction assembly 232 may be configured with 4 stages of spur gears, including a first gear 234, a second gear 235, a third gear 236 and a fourth gear 237.
- fourth gear 237 acts as a clamping gear for turning additional components of motorized tensioning device 160, as described in further detail below.
- the current embodiment of second gear reduction assembly 232 includes four gears. However, other embodiments could use any other number of gears.
- the number of gears comprising first gear reduction assembly 230 may vary in different embodiments. Additionally, in different embodiments, the type of gears used in first gear reduction assembly 230 and/or second gear assembly 232 could vary. In some cases, spur gears may be used.
- gears that may be used include, but are not limited to: helical gears, external gears, internal gears, bevel gears, crown gears, worm gears, non-circular gears, rack and pinion gears, epicyclic gears, planetary gears, harmonic drive gears, cage gears, magnetic gears as well as any other kinds of gears and/or any combinations of various kinds of gears.
- the number, type and arrangement of gears for gear reduction system 228 may be selected to achieve the desired tradeoff between size, torque and speed of the motorized tensioning system 160.
- motorized tensioning system 160 can include provisions for winding and unwinding portions of a lace.
- motorized tensioning system 160 can include spool 240.
- spool 240 may further comprise a first receiving portion 242 and a second receiving portion 244 for receiving a lace and a portion of a spring, respectively.
- first receiving portion 242 may comprise a first lace winding region 246 and a second lace winding region 248, which in some cases can be used to separately wind two ends of a lace. Since torque output goes down as the lace builds up in diameter, using separate winding regions for each lace end may help decrease the diameter of wound lace on spool 240 and thereby minimize torque output reduction.
- first lace winding region 246 and second lace winding region 248 may be separated by a dividing portion 249, which may include a lace receiving channel 247 for permanently retaining a portion of the lace on spool 240.
- first receiving portion 242 may comprise a single lace winding region.
- Motorized lacing system 160 may include provisions for transferring torque between a final drive gear of second gear reduction assembly 232 and spool 240.
- motorized lacing system 160 may include provisions for transferring torque from second gear reduction assembly 232 (or more generally from gear reduction system 228) to spool 240 in a manner that allows for incremental tightening, incremental loosening and full loosening of a lace.
- motorized lacing system 160 may be configured with a torque transmitting system 250 that facilitates the transmission of torque from fourth gear 237 of second gear reduction assembly 232 to spool 240.
- Torque transmitting system 250 may further comprise various assemblies and components.
- torque transmitting system 250 may include a ratcheting assembly 252, a shaft 254 and a rotation control assembly 256.
- the components of torque transmitting system 250 operate to transmit torque from fourth gear 237 of second gear reduction assembly 232 to spool 240. More specifically, these components operate in a manner that allows for incremental tightening (spool winding), incremental loosening (spool unwinding) as well as full tension release (during which time substantially no torque is transferred from fourth gear 237 to spool 240).
- motorized tensioning device 160 may further include a secondary winding assembly 260.
- secondary winding assembly 260 may be configured to apply torque to spool 240 independently of any torque applied by motor 220.
- secondary winding assembly 260 comprises a spring member 262 and a rotatable spring bearing 264.
- Spring member 262 may extends between second receiving portion 244 of spool 240 and spring bearing 264.
- a first end portion 263 of spring member 262 may be associated with spool 240 while a second end portion 265 of spring member 262 may be associated with spring bearing 264.
- spring member 262 may be configured to apply a biasing torque that may tend to rotate spool 240 in the lace winding direction in the absence of other forces or torques (for example when there is slack in the lace).
- Spring member 262 could be a wind-up spring, a constant force spring, a constant torque spring, a clock spring as well as any other kind of spring.
- Some embodiments can also include a fixed bearing 266, which may be associated with an end of shaft 254.
- fixed bearing 266 may be received within a recess 268 of inner housing portion 216.
- an end of shaft 254 may be disposed within opening 269 of fixed bearing 266, and may be configured so that shaft 254 can slide through opening 269 to provide some axial movement for shaft 254.
- motorized tensioning device 160 may include provisions for adjusting the operation of motor 220 according to one or more feedback signals.
- motorized tensioning device 160 may include a limit switch assembly 258.
- limit switch assembly 258 may detect current across portions of rotation control assembly 256 and vary the operation of motor 220 according to the detected current. Further details on the operation of limit switch assembly 258 are discussed in detail below.
- first rotational direction and second rotational direction refer to rotational directions about a longitudinal axis 284 (see FIG. 12 ) of shaft 254 and are generally opposite rotational directions.
- the first rotational direction may refer to the clockwise rotation of a component about longitudinal axis 284, when viewing the component from the vantage point of first end portion 620 of shaft 254.
- First end portion 620 of shaft 254 may be the end portion associated with fourth gear 237.
- the second rotational direction may be then be characterized by the counterclockwise rotation of a component about longitudinal axis 284, when viewing the component from the same vantage point.
- motorized tensioning device 160 may begin operating in order to rotate crankshaft 222.
- Crankshaft 222 may turn an input gear of first gear reduction assembly 230, such that the output gear of first gear reduction assembly 230 drives first gear 234 of second gear reduction assembly 232.
- the intermediate second gear 235 and third gear 236 both rotate, which drives fourth gear 237 in the first rotational direction.
- fourth gear 237 may engage and drive torque transmitting system 250 such that spool 240 may eventually begin to rotate in the first rotational direction. This causes lace 152 to wind onto first receiving portion 242 of spool 240.
- motor 220 may operate to rotate crankshaft 222.
- motor 220 and crankshaft 222 turn in an opposite direction of the direction associated with tightening.
- the gear reduction system 228 is then driven such that fourth gear 237 of second gear reduction assembly 232 rotates in the second rotational direction.
- fourth gear 237 does not directly drive portions of torque transmitting system 250 and spool 240. Instead, the motion of fourth gear 237 in the second rotational direction causes torque transmitting system 250 to momentarily release spool 240, allowing spool 240 to unwind by a predetermined amount after which torque transmitting system 250 reengages spool 240 and prevents further unwinding.
- This sequence of releasing and catching spool 240 occurs over and over as long as fourth gear 237 rotates in the second rotational direction. Further details of the method by which this incremental loosening is achieved is described in detail below.
- torque transmitting system 250 operates so that substantially no torque is transmitted to spool 240 from any components of torque transmitting system 250.
- spool 240 may rotate more easily in the unwinding direction about shaft 254 (for example, as a wearer manually loosens lace 152 to take off article 100).
- secondary winding assembly 260 may apply a small amount of torque to second receiving portion 244 of spool 240, which acts to wind up slack in lace 152.
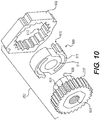
- FIGS. 10-14 illustrate various schematic views of the components comprising torque transmitting system 250. For purposes of clarity, these components are shown in isolation from other parts of motorized tightening device 160. Additionally, some components are not shown or may be shown in phantom in some views to reveal interior components.
- ratcheting assembly 252 may comprise several components including fourth gear 237, pawl member 600 and ratchet housing 602 (ratchet housing 602 is not shown in FIG. 11 to better show the relative positions of fourth gear 237, pawl member 600 and spool 240).
- Fourth gear 237 may include an extended boss portion 604.
- the extended boss portion 604 further includes a frictional face 606 that contacts pawl member 600.
- Fourth gear 237 may also include an internally threaded cavity 608 that may engage threading on shaft 254.
- fourth gear 237 is characterized as part of both ratcheting assembly 252 and second gear reduction assembly 232 as fourth gear 237 acts as an element that confronts and directly drives pawl member 600 and also as a final driving gear of second gear reduction assembly 232.
- characterizing fourth gear 237 as part of one assembly does not preclude it from being associated with a different assembly.
- pawl member 600 is configured to interface with ratchet housing 602.
- teeth 610 which extend from pawl arms 611, may engage with corresponding teeth 612 on ratchet housing 602.
- the geometry of pawl arms 611 and teeth 610 provide an arrangement where pawl member 600 can rotate within ratchet housing 602 in a first rotational direction, but pawl member 600 is prevented from rotating within ratchet housing 602 in a second rotational direction that is opposite of the first rotational direction.
- pawl member 600 includes a boss engaging surface 614 that confronts and can engage frictional face 606 of fourth gear 237. When frictional face 606 of fourth gear 237 is brought into contact with boss engaging surface 614 of pawl member 600, fourth gear 237 may drive pawl member 600. Moreover, the one-way ratchet design of ratcheting assembly 252 ensures that fourth gear 237 may only drive pawl member 600 in a first rotational direction.
- Pawl member 600 may include a spool engaging surface 616 (see also FIG. 16 ) which confronts a first end 670 of spool 240. When spool engaging surface 616 is pressed against spool 240 with enough frictional force, pawl member 600 may be used to drive spool 240 in the first rotational direction. Thus, in the configuration shown in FIG. 11 , with fourth gear 237, pawl member 600 and spool 240 all clamped together under sufficient frictional force, fourth gear 237 may act to drive pawl member 600 and thus spool 240.
- Ratcheting assembly 252 is only intended to be exemplary of a one-way torque transmitting mechanism that may be used to transmit torque to a spool.
- Other embodiments are not limited to ratchet-like mechanisms and could include other one-way mechanisms.
- Examples of other one-way mechanisms that could be used include, but are not limited to: roller bearings, sprag clutches, ratcheting wheel and pawl as well as other mechanisms.
- FIGS. 12-14 illustrate various views of additional components of torque transmitting system 250, including shaft 254 and rotation control assembly 256.
- FIG. 12 illustrates an isolated exploded view of shaft 254 and rotation control assembly 256
- FIGS. 13-14 illustrate assembled views of some portions of these components from various perspectives.
- Shaft 254 may comprise a first end portion 620.
- first end portion 620 may include threading 624.
- threading 624 may engage internally threaded cavity 608 (see FIG. 10 ) of fourth gear 237, which may facilitate the relative axial movement of fourth gear 237 along shaft 254.
- Shaft 254 may also include a second end portion 622 that engages opening 269 of fixed bearing 266.
- an intermediate portion 626 of shaft 254 may be disposed between first end portion 620 and second end portion 622.
- shaft 254 are configured to receive components of torque transmitting system 250 and spool 240.
- First end portion 620 and second end portion 622 may be associated with ratcheting assembly 252 and rotation control assembly 256, respectively.
- Intermediate portion 626 may be inserted within a central cavity 690 of spool 240 (see FIG. 15 ), such that spool 240 may rotate about intermediate portion 262.
- intermediate portion 626 of shaft 254 further includes a flange portion 628 that extends radially outwards from shaft 254.
- Flange portion 628 may include a spool engaging surface 630 that contacts spool 240.
- An opposing surface of flange portion 628 (not shown) may confront rotation control assembly 256.
- flange portion 628 may include one or more slots 632.
- rotation control assembly 256 may include an engagement plate 640 and a compression spring 642.
- engagement plate 640 further includes pins 644 that extend towards engagement plate 640 and spool 240.
- pins 644 may be inserted through slots 632 of flange portion 628.
- pins 644 may be inserted into alignment holes 650 of spool 240 (see FIG. 15 ), which prevents shaft 254 and spool 240 from rotating independently of one another.
- compression spring 642 may be disposed between engagement plate 640 and fixed bearing 266 so that compression spring 642 may act to bias engagement plate 640 in an axial direction towards flange portion 628 and spool 240.
- alternate methods could be used for releasably coupling a shaft and spool.
- examples include other kinds of physical interlocking features or including friction increasing features.
- axial compliant friction coupling could be achieved using a wave washer or Belleville washer.
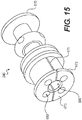
- FIG. 15 illustrates an isometric view of an embodiment spool 240 in isolation.
- spool 240 includes provisions for receiving pins 644 of engagement plate 640.
- four alignment holes 650 are approximately evenly spaced about a second end face 673.
- this particular view of spool 240 clearly illustrates a slot 675 that may be used for retaining an end of spring member 262.
- FIG. 16 the components of torque transmitting system 250 are shown in their assembled configuration along shaft 254.
- spool 240 is shown in phantom on shaft 254.
- a cross-sectional portion of inner housing portion 216 is shown for reference.
- some components of torque transfer system 250 are constrained from any axial movement.
- spool 240 and ratchet housing 602 are constrained from moving in an axial direction (or along a longitudinal direction of shaft 254).
- fourth gear 237 which is threaded along first end portion 620 of shaft 254, can rotate about shaft 254 and translate axially (because of the threaded engagement) along shaft 254.
- a wall portion 652 of inner housing portion 216 limits the axial motion of fourth gear 237 in a direction away from ratcheting assembly 252.
- the arrangement shown here for torque transmitting system 250 also allows for both rotation and axial translation of shaft 254.
- second end portion 622 of shaft 254 may slide through fixed bearing 266, while first end portion 620 of shaft 254 is disposed in a channel 660 of inner housing portion 216 (see FIG. 8 ) that also allows for some axial motion of shaft 254.
- the amount of axial translation may be limited by features including contact between flange portion 628 and spool 240, as well as possibly other features.
- FIGS. 17 through 26 illustrate schematic views of torque transmitting system 250 and spool 240 for purposes of illustrating the operation of torque transmitting system 250 during incremental tightening, incremental loosening and full loosening.
- torque transmitting system 250 is in a configuration where the lace is fully loosened. More specifically, this configuration is one in which no torque is transmitted to spool 240 from torque transmitting system 250.
- fourth gear 237 may be spaced away from pawl member 600 (disposed within ratchet housing 602) so that no torque is transmitted from fourth gear 237 to pawl member 600.
- spool 240 may rotate without any substantial resistance at first end portion 670 from pawl member 600. Furthermore, in this configuration engagement plate 640 and flange portion 628 are spaced apart from second end 672 of spool 640, so that spool 240 also does not undergo any resistance to rotation at second end 672. Although features of inner housing portion 612 prevent any axial motion of spool 240, in this configuration spool 240 may rotate in a first rotational direction or a second rotational direction.
- spool 240 may be biased to rotate in a first rotational direction (i.e., lace winding direction) by secondary winding assembly 260 (not shown), which applies a biasing torque to spool at second receiving portion 244.
- this biasing force may be just large enough to pull in slack and can be overcome relatively easily by a wearer pulling on the laces to unwind them from spool 240.
- spool 240 may rotate relatively freely in this configuration, though spool 240 will be biased to wind in slack in the absence of tension applied by the lace to spool 240.
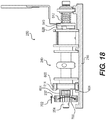
- FIG. 18 shows the operation of torque transmitting system 250 as motor 220 (not shown) begins to rotate.
- motor 220 drives gear reduction system 228, so that fourth gear 237 is rotated in the first rotational direction (represented schematically by arrow 700).
- fourth gear 237 translates axially (indicated by arrow 702) towards pawl member 600 because of the threaded interface between fourth gear 237 and shaft 254.
- Fourth gear 237 continues to rotate and translate axially until frictional face 606 of boss portion 604 contacts and presses against boss engaging surface 614 of pawl member 600.
- the preload from compression spring 642 may provide some drag on engagement plate 640 and flange portion 628 (which are coupled) to keep shaft 254 from rotating while fourth gear 237 translates axially along shaft 254. Without this drag, or another source of friction or drag, shaft 254 may be inclined to turn with fourth gear 237 so that fourth gear 237 would not translate axially.
- FIG. 19 shows the operation of torque transmitting system 250 in a configuration where spool 240 may begin to wind in lace (i.e., torque transmitting system 250 is in the incremental tighten mode).
- motor 220 continues to drive fourth gear 237 in the first rotational direction (indicated schematically as arrow 700), though contact with pawl member 600 prevents any further axial translation of fourth gear 237 along shaft 254. Therefore, as fourth gear 237 continues to turn, shaft 254 is translated axially (indicated schematically as arrow 706) so that first end portion 620 translates further from spool 240.
- flange portion 628 compresses against second end 672 of spool 240, allowing pins 644 to engage alignment holes (see FIG. 15 ) of spool 254. This locks shaft 254 and spool 240 together and prevents relative rotation of the two components. The contact between flange portion 628 and spool 240 prevents any further axial translation of shaft 254.
- further driving of fourth gear 237 acts to rotate spool 240 in the first rotational direction (indicated schematically by arrow 708). As long as motor 240 continues to drive fourth gear 237, lace may be wound onto spool 240.
- limit switch assembly 258 is separated from engagement plate 640. This breaks the continuity of current between contacts 259.
- FIGS. 20 and 21 illustrate close up schematic views of some components.
- a schematic lace 720 is shown with spool 240.
- ratcheting assembly 252 ensures that torque can only be transmitted from fourth gear 237 to pawl member 600 and spool 240, and not vice versa.
- the one-way operation of ratcheting assembly 252 prevents torque generated by spool 240 from turning pawl member 600, fourth gear 237 and ultimately motor 220.
- ratcheting assembly 252 functions as a load-holding mechanism that prevents spool 240 from unintentionally rotating in the second rotational direction (i.e., the unwinding direction). This arrangement may help prevent spool 240 from back winding motor 220 in situations where motor 220 stops or the torque applied to spool 240 by the lace exceeds to torque applied to the spool by fourth gear 237.
- FIGS. 22-25 show the operation of torque transmitting system 250 in an incremental loosen mode.
- incremental loosening may occur in several stages.
- motor 220 is operated to drive fourth gear 237 in the second rotational direction (indicated schematically as arrow 730).
- fourth gear 237 to translate axially away from pawl member 600 and spool 240 in a direction indicated schematically by arrow 732.
- the clamping force between fourth gear 237, pawl member 600 and first end 670 of spool 240 is released.
- a second stage shown in FIG.
- fourth gear 237, pawl member 600 and spool 240 are clamped together, which prevents spool 240 from further rotation in the second rotational direction. These three stages may be repeated in succession to incrementally unwind lace from spool 240.
- FIG. 26 shows the operation of torque transmitting system 250 in a fully loosen mode (or full release mode).
- motor 220 may drive fourth gear 237 to rotate in the second rotational direction (indicated schematically by arrow 740) until the lace tension is low enough that spool 240 no longer unwinds.
- fourth gear 237 may continue to rotate until fourth gear 237 encounters a hard stop provided by wall portion 652 of inner housing portion 216.
- a secondary winding assembly may be configured to operate substantially independently of a torque transmitting system. This may allow the winding assembly to draw in slack during various stages of operation of the torque transmitting system.
- the secondary winding assembly may be configured to draw in slack in a tensile member (e.g., lace), which could occur during tightening, loosening and fully loosening of the tensile member.
- a tensile member e.g., lace
- FIGS. 27 through 29 illustrate schematic isometric views of some portions of motorized tightening device 160. More specifically, FIGS. 27 through 29 are intended to illustrate the general operation of secondary winding assembly 260 during different operating modes of the system.
- FIG. 27 illustrates a configuration of motor tightening device 160 operating in a tightening mode.
- fourth gear 237 in cooperation with torque transmitting system 250, drives spool 240 in a first rotational direction and thereby winds lace 800 around spool 240.
- spring member 262 may be wound from spool 240 to spring bearing 264 as spool 240 is driven by the motor.
- motorized tightening device 160 is operating in a mode where no torque is being supplied to spool 240 by a motor.
- slack has developed in lace 800 so that lace 800 is not applying much torque to spool 240 either.
- secondary winding assembly 260 provides a biasing force to wind spool 240 in the first rotational direction, as spring member 262 unwinds from second receiving portion 244 of spool 240 and onto spring bearing 264.
- Secondary winding assembly 260 may improve usability of tensioning system 150, by ensuring that slack is rapidly wound up when motor 220 is disengaged. This is desirable so a user can quickly put the article on or take the article off without having to wait for the motor to wind in slack.
- this rapid slack winding is accomplished using constant force spring that is stored on a freewheeling spool and rewound onto one end of the lace spool.
- constant force spring that is stored on a freewheeling spool and rewound onto one end of the lace spool.
- a variety of different elements or systems could be used for this rapid slack winding.
- a second small motor with either no reduction or light gear reduction could be used for slack winding.
- other spring elements could be used.
- an elastomeric torsion spring could be used.
- a geared clock spring could be used.
- a spring member could be wound onto other components of a tightening system.
- spring member 820 is configured to wind around spool 240 at one end, and around motor 220 at another. This alternative arrangement may provide a slightly more compact configuration for a motorized tightening system. In addition to improving the speed of fully winding and unwinding the lace, battery life may be greatly improved over systems that utilize a motor to completely wind and unwind a lace.
- a motorized tensioning device can vary from one embodiment to another.
- the illustrated embodiments show a motorized tensioning device disposed on the heel of an upper.
- other embodiments may incorporate a motorized tensioning device in any other location of an article of footwear, including the forefoot and midfoot portions of an upper.
- a motorized tensioning device could be disposed in a sole structure of an article.
- the location of a motorized tensioning device may be selected according to various factors including, but not limited to: size constraints, manufacturing constraints, aesthetic preferences, optimal lacing placement, ease of removability as well as possibly other factors.
- a wearer may access components by removing a portion of housing unit 212 (see FIG. 1 ).
- spool 240 may be replaceable in the event of a broken lace.
- a motorized tensioning device may be incorporated into an external heel counter.
- an external heel counter may function as a harness for mounting a motorized tensioning device to an article.
- the external heel counter may be specially adapted to receive a motorized tensioning device.
- An example of a heel counter configured for use with a lace tensioning device is disclosed in Gerber, U.S. Patent Application Publication No. _, (now U.S. Patent Application Number 13/481,132, filed May 25, 2012 and titled "Article of Footwear with Protective Member for a Control Device").
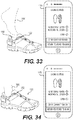
- FIG. 31 illustrates a schematic isometric view of an embodiment of article of footwear 100 that is configured with a tensioning system 150.
- article of footwear 100 also referred to hereafter simply as article 100
- tensioning system 150 may be used with any other kind of footwear including, but not limited to: hiking boots, soccer shoes, football shoes, sneakers, running shoes, cross-training shoes, rugby shoes, basketball shoes, baseball shoes as well as other kinds of shoes.
- article 100 may be configured for use with various kinds of non-sports related footwear, including, but not limited to: slippers, sandals, high heeled footwear, loafers as well as any other kinds of footwear.
- a tensioning system may not be limited to footwear and in other embodiments a tensioning system could be used with various kinds of apparel, including clothing, sportswear, sporting equipment and other kinds of apparel.
- a tensioning system may be used with braces, such as medical braces.
- Article 100 may include upper 102 and sole structure 104.
- upper 102 may be any type of upper.
- upper 102 may have any design, shape, size and/or color.
- upper 102 could be a high top upper that is shaped to provide high support on an ankle.
- upper 102 could be a low top upper.
- sole structure 104 may be configured to provide traction for article 100. In addition to providing traction, sole structure 104 may attenuate ground reaction forces when compressed between the foot and the ground during walking, running or other ambulatory activities.
- the configuration of sole structure 104 may vary significantly in different embodiments to include a variety of conventional or non-conventional structures. In some cases, the configuration of sole structure 104 can be configured according to one or more types of ground surfaces on which sole structure 104 may be used. Examples of ground surfaces include, but are not limited to: natural turf, synthetic turf, dirt, as well as other surfaces.
- sole structure 104 may include different components.
- sole structure 104 may include an outsole, a midsole, and/or an insole.
- sole structure 104 can include one or more cleat members or traction elements that are configured to increase traction with a ground surface.
- sole structure 104 may be joined with upper 102.
- upper 102 is configured to wrap around a foot and secure sole structure 104 to the foot.
- upper 102 may include opening 130 that provides access to an interior cavity of article 100.
- Tensioning system 150 may comprise various components and systems for adjusting the size of opening 130 and thereby tightening (or loosening) upper 102 around a wearer's foot.
- tensioning system 150 may comprise lace 152 as well as motorized tensioning device 160.
- Lace 152 may be configured to pass through various different lacing guides 154, which may be further associated with the edges of throat opening 132.
- lacing guides 154 may provide a similar function to traditional eyelets on uppers.
- throat opening 132 may generally constrict so that upper 102 is tightened around a foot.
- lacing guides 154 in this embodiment is only intended to be exemplary and it will be understood that other embodiments are not limited to a particular configuration for lacing guides 154.
- the particular types of lacing guides 154 illustrated in the embodiments are also exemplary and other embodiments may incorporate any other kinds of lacing guides or similar lacing provisions.
- lace 154 could be inserted through traditional eyelets.
- Some examples of lace guiding provisions that may be incorporated into the embodiments are disclosed in Cotterman et al., U.S. Patent Application Publication Number 2012/0000091, published January 5, 2012 and entitled "Lace Guide”. Additional examples are disclosed in Goodman et al., U.S.
- Patent Application Publication Number 2011/0266384 published November 3, 2011 and entitled “Reel Based Lacing System” (the “Reel Based Lacing Application”). Still additional examples of lace guides are disclosed in Kerns et al., U.S. Patent Application Publication Number 2011/0225843, published September 22, 2011 and entitled “Guides For Lacing Systems”.
- Lace 152 may comprise any type of type of lacing material known in the art.
- Examples of lace that may be used include cables or fibers having a low modulus of elasticity as well as a high tensile strength.
- a lace may comprise a single strand of material, or can comprise multiple strands of material.
- An exemplary material for the lace is SPECTRATM, manufactured by Honeywell of Morris Township NJ, although other kinds of extended chain, high modulus polyethylene fiber materials can also be used as a lace. Still further exemplary properties of a lace can be found in the Reel Based Lacing Application mentioned above.
- lace 152 may be passed through lacing guides 154 and may pass through internal channels (not shown) within upper 102 after entering channel openings 156 that are above lacing guides 154.
- the internal channels extend around the sides of upper 102 and guide the lace towards motorized tensioning device 160, which may be mounted on heel portion 14 of upper 102.
- motorized tensioning device 160 may include provisions for receiving portions of lace 152.
- end portions of lace 152 exit internal channels of upper 102 and pass through apertures in a housing unit 212 of motorized tensioning device 160.
- Motorized tensioning device 160 may be configured to automatically apply tension to lace 152 for purposes of tightening and loosening upper 102.
- motorized tensioning device 160 may include provisions for winding lace 152 onto, and unwinding lace 152 from, a spool internal to motorized tensioning device 160.
- the provisions may include an electric motor that automatically winds and unwinds the spool in response to various inputs or controls.
- motorized tensioning device 160 may be removably attached, so that motorized tensioning system 160 can be easily removed by a user and modified (for example, when a lace must be changed). Examples of provisions for removably attaching motorized tensioning system 160 to upper 102 are discussed in detail later. In other cases, motorized lacing device 160 could be permanently attached to upper 102. In one embodiment, for example, an external harness (not shown) may be used to mount motorized tensioning system 160 to upper 102 at heel portion 14.
- motorized tensioning device 160 may communicate with remote device 170.
- motorized tensioning device 160 may receive operating instructions from remote device 170.
- motorized tensioning device 160 may receive instructions to apply increased tension to lace 152 by winding the spool.
- remote device 170 may be capable of receiving information from motorized tensioning device 160.
- remote device 170 could receive information related to the current tension in lace 152 and/or other sensed information.
- remote device 170 may function as a remote control that may be used by the wearer to operate tensioning system 150.
- remote device 170 comprises a mobile phone, such as the iPhone made by Apple, Inc. In other embodiments, any other kinds of mobile phones could also be used including smartphones. In other embodiments, any portable electronic devices could be used including, but not limited to: personal digital assistants, digital music players, tablet computers, laptop computers, ultrabook computers as well as any other kinds of portable electronic devices. In still other embodiments, any other kinds of remote devices could be used including remote devices specifically designed for controlling motorized tensioning device 160. in another embodiment, discussed in detail below, remote device 170 could comprise a bracelet, wristband and/or armband that is worn by a user and specifically designed for communicating with motorized tensioning device 160. The type of remote device could be selected according to software and hardware requirements, ease of mobility, manufacturing expenses, as well as possibly other factors.
- motorized tightening device 160 may communicate with multiple remote devices. For example, a user may use a mobile device, such as an iPhone, at home to identify and set preferred tension settings, and another remote device, such as with a bracelet, wristband and/or armband, with more rudimentary controls might then be used to issue commands to motorized tightening device 160, for example while playing sports. For example, a bracelet might allow a user to recall a set tension and adjust it, but not set a new tension for later recall.
- a mobile device such as an iPhone
- another remote device such as with a bracelet, wristband and/or armband
- remote device 170 may communicate with motorized tightening device 160 (or indirectly with motorized tightening device 160 via a secondary device, such as a separate control unit).
- Examples of different communication methods include, but are not limited to: wireless networks such as personal area networks (e.g., Bluetooth®) and local area networks (e.g., Wi-Fi) as well as any kinds of RF based methods known in the art.
- wireless networks such as personal area networks (e.g., Bluetooth®) and local area networks (e.g., Wi-Fi) as well as any kinds of RF based methods known in the art.
- infrared light may be used for wireless communication.
- remote device 170 and motorized tensioning system 160 may be physically connected and communicate through one or more wires.
- remote device 170 may be configured to operate a corresponding article of footwear which also includes a similar tensioning system (e.g., a pair of footwear each having a tensioning system). As described below, remote device 170 may be used to operate each the tensioning systems of each article independently of one another.
- FIG. 32 illustrates a schematic view of an embodiment of remote device 170, including a schematic representation of an exemplary user interface for controlling tensioning system 150.
- remote device 170 may be capable of running a lacing control software application 180, hereafter referred to simply as application 180.
- application 180 may be downloaded by a user from a third party online store or website.
- Such a mobile phone (or similar digital device) may include a touch screen LCD device which may be used by application 180 for input and output interaction with a user.
- an LCD or non-touch screen LCD may be used for output display only.
- Application 180 may display, and respond to user interaction with, a plurality of control buttons 182 and initiate control commands in response to such interaction.
- Exemplary control commands may include, but are not limited to, left/right shoe selection, incremental tighten, incremental loosen, open/fully loosen, store tension, and recall/restore tension.
- these control buttons include a first button 191 and a second button 192, which are respectively used to select the shoe (left or right) that will receive and respond to the control commands.
- first button 191 or second button 192 may be selected, but both may not be selected simultaneously.
- application 180 may include third button 193 for initiating an "incremental tighten” command, a fourth button 194 for initiating an "incremental loosen” command and a fifth button 195 for initiating an "open” (or fully loosen) command.
- some embodiments could include a "fully tighten” command that would tighten the footwear until a predetermined threshold is achieved (for example, a threshold pressure, winding distance, etc.).
- a shoe, article, or other item may include more than one motorized tightening device 160.
- each motorized tightening device 160 may include wireless communication hardware for separately communicating with a remote device 170, or a single wireless communication device may be provided for common use by multiple motorized tightening devices 160.
- remote device 170 may be configured, such as with application 180, to provide additional buttons or other controls to individually adjust plural motorized tightening devices 160 on a single article.
- button 191 illustrated in FIG. 32 could be subdivided into a top region and lower region which are separately responsive to user interaction. By use of these regions, one of two motorized tightening devices 160 could be selected for tension adjustment via buttons 193, 194, and 195.
- additional buttons like buttons 193 and 194 could be displayed at the same time by application 180, allowing for more rapid adjustment of multiple motorized tightening devices 160.
- Application 180 may also include provisions for storing and using preferred tension settings.
- sixth button 196 and seventh button 197 may be used to initiate a "store current tension" command and a "return to stored tension” command, respectively.
- the tension values could be stored at the remote device, while in other cases the tension values could be stored in internal memory of a control board for the motorized tensioning device 160.
- Still other embodiments could include provisions for storing multiple tension settings. For example, a user may prefer a tighter fit for playing sports and a looser fit for casual activities. In such cases, remote device 170 may allow a user to store two or more tension settings, corresponding to at least two different lace tension preferences.
- sixth button 196 may cause the tension setting for a single, currently selected, motorized tightening device 160 to be stored, and in some embodiments sixth button 196 may cause the tension settings for multiple motorized tightening devices 160 to be stored in a single action.
- storage or recall of tensions for multiple motorized tightening devices 160 may be performed with a single command issued by a remote device 170 or with a series of control commands, such as by issuing separate control commands to each motorized tightening device 160.
- application 180 and/or remote device 170 may be configured to selectively control individual items or individual sets of items, such as a pair of shoes, from among multiple items or sets of items within communication range of remote device 170.
- application 180 may be configured to enumerate items by unique identifiers assigned to each item, display the enumerated items to a user, and receive an input selecting an item.
- an application 180 may be paired via Bluetooth® with a particular item or set of items.
- a remote device without an LCD display may include a control button that may be pressed, repeatedly if needed, to select a desired item, and the item may include an LED which is illuminated when it is in wireless communication with the remote device.
- the embodiments are not limited to a particular user interface or application for remotely operating motorized tensioning device 160.
- the embodiments here are intended to be exemplary, and other embodiments could incorporate any additional control buttons, interface designs and software applications.
- some embodiments may not include provisions for selecting the shoe to be controlled, and instead could utilize two sets of control buttons, where each set corresponds to either the left or right shoe.
- the control buttons for initiating various operating commands can be selected according to various factors including: ease of use, aesthetic preferences of the designer, software design costs, operating properties of the motorized tensioning device 160 as well as possibly other factors.
- operating modes may refer to states of the tensioning system itself, as well as to the operating modes of individual subsystems and/or components of the tensioning system.
- Exemplary modes include an "incremental tighten mode", an “incremental loosen mode” and a “fully loosen” mode. The latter two modes may also be referred to as an "incremental release mode” and a “full release mode”.
- incremental tighten mode motorized tightening device 160 may operate in a manner that incrementally (or gradually) tightens, or increases the tension of, lace 152.
- motorized tightening device 160 may operate in a manner that incrementally (or gradually) loosens, or releases tension in, lace 152. As discussed further below, the incremental tighten mode and the incremental loosen mode may tighten and loosen a lace in discrete steps or continuously. In the full release mode, motorized tightening device 160 may operate in a manner so that tension applied to the lace by the system is substantially reduced to a level where the user can easily remove his or her foot from the article. This is in contrast to the incremental release mode, where the system operates to achieve a lower tension for the lace relative to the current tension, but not necessarily to completely remove tension from the laces.
- the full release mode may be utilized to quickly release lace tension so the user can remove the article
- the incremental release mode may be utilized to make minor adjustments to the lace tension as a user searches for the desired amount of tension.
- the embodiments describe three possible modes of operation (and associated control commands), other operating modes may also be possible.
- some embodiments could incorporated a fully tighten operating mode where motorized tightening device 160 continues to tighten lace 152 until a predetermined tension has been achieved.
- FIGS. 33 through 37 illustrate schematic views of an embodiment of article 100 being tightened and loosened during different operating modes of tensioning system 150. Each figure also shows a schematic view of remote device 170, including the particular control button used to initiate each operating mode.
- FIG. 33 shows article 100 is in a fully opened state just prior to the entry of foot 200.
- lace 152 may be loose enough to allow a user to insert his or her foot into opening 130.
- foot 200 is inserted into article 100, which remains in the fully opened state.
- an incremental tighten command has been sent to motorized tensioning device 160 by pressing third button 193 of remote device 170. This command causes motorized tensioning device 160 to enter an incremental tighten mode. At this point, the tension of lace 152 is increased to tighten upper 102 around foot 200.
- lace 152 is drawn into motorized tensioning device 160, which pulls on the portions of lace 152 disposed adjacent throat opening 132 and thus constricts throat opening 132.
- this incremental tightening can occur in discrete steps so that each time the wearer presses third button 193, lace 152 is taken up by a predetermined amount (for example by rotating a spool within motorized tensioning device 160 through a predetermined angle). In other cases, this incremental tightening can occur in a continuous manner, as long as the wearer continues to touch third button 193.
- the speed of tightening can be set so that the system does not overshoot a preferred level of tightness (i.e., the system doesn't move between not tight enough and overly tight too quickly) while also being large enough to avoid overly long times for fully tightening article 100.
- FIGS. 36 and 37 illustrate schematic views of two different operating modes where lace 152 may be loosened.
- a wearer can press fourth button 194 to initiate an incremental loosen command in tensioning system 150.
- motorized tensioning device 160 may operate in an incremental loosen mode, in which lace 152 is released from motorized tensioning device 160 (i.e., sections of lace 152 exit from motorized tensioning device 160). This relaxes some of the tension in lace 152 and allows throat opening 132 to partially expand.
- this incremental loosening can occur in discrete steps so that each time the wearer presses fourth button 194, lace 152 is let out up by a predetermined amount (for example by rotating a spool within motorized tensioning device 160 through a predetermined angle). In other cases, this incremental loosening can occur in a continuous manner, as long as the wearer continues to touch fourth button 194. In some cases, the speed of loosening can be set so that the system does not overshoot a preferred level of tightness (i.e., the system doesn't move between too tight and not tight enough too quickly) while also being large enough to avoid overly long times for fully loosening article 100. With this arrangement, a wearer can continue increasing and decreasing the tension of lace 152 (using the incremental tighten and incremental loosen modes) until a preferred level of tightness for upper 102 is achieved.
- a wearer can press fifth button 195 to initiate an open, or fully loosen, command in tensioning system 150.
- the open command may be used to quickly relieve all (or most of) tension in lace 152 so that a user can quickly remove article 100.
- motorized tensioning device 160 upon receiving the open command, operates in a fully loosen mode. In this mode, motorized tensioning device operates to let out enough of lace 152 so that substantially all tension is removed from lace 152. In some cases, this may be achieved by continuously monitoring tension in lace 152 (for example, using sensors) and letting out lace 152 until the level of tension is below a threshold tension.
- this may be achieved by letting out a predetermined length of lace 152 known to correspond approximately to the amount needed to achieve a fully loosened state for tensioning system 150. As seen in FIG. 37 , with tensioning system 150 in the open state, foot 200 can be easily and comfortably removed from footwear 100.
- control of a motorized lacing device can be accomplished using various methods and devices.
- some embodiments may utilize various kinds of remote devices, including an RF based control bracelet 390.
- Control bracelet 390 may incorporate one or more buttons for sending commands to a motorized tensioning device.
- control bracelet 390 may include buttons for initiating incremental tightening and incremental loosening commands.
- additional buttons can be included for initiating any other commands including the open command (or fully loosen command), store tension command and return to stored tension command.
- Still other cases could incorporate any other buttons for issuing any other kinds of commands.
- buttons for tightening, loosening and/or performing other functions can be located directly on an article.
- some embodiments could incorporate one or more buttons located on or adjacent to the housing of a motorized tensioning device.
- a motorized tightening device maybe controlled using voice commands. These commands could be transmitted through a remote device, or to a device capable of receiving voice commands that is integrated into the article and in communication with the motorized tensioning device.
- Embodiments can incorporate a variety of sensors for providing information to a control unit of a motorized tensioning system.
- an H-bridge mechanism is used to measure current.
- the measured current is provided as an input to control unit 302 (see FIG. 5 ).
- a predetermined current may be known to correspond to a certain lace tension.
- a motorized tensioning system may adjust the tension of a lace until the predetermined current is measured, which indicates the desired lace tension has been achieved.
- proportional control only could be used.
- PI control could be used or full PID.
- simple averaging could be used or other filtering techniques including fuzzy logic and band-pass to reduce noise.
- Still other embodiments can include additional types of sensors.
- pressure sensors could be used under the insoles of an article to indicate when the user is standing.
- a motorized tensioning system can be programmed to automatically loosen the tension of the lace when the user moves from the standing position to a sitting position. Such a configuration may be useful for older adults that may require low tension when sitting to promote blood circulation but high tension for safety when standing.
- Still other embodiments could include additional tension sensing elements.
- three point bend indicators could be used in the lace to more accurately monitor the state of the tensioning system, including the lace.
- various devices to measure deflection such as capacitive or inductive devices could be used.
- strain gauges could be used to measure tension induced strain in one or more components of a tensioning system.
- sensors such as gyroscopes and accelerometers could be incorporated into a tensioning system.
- an accelerometer and/or gyroscope could be used to detect sudden moment and/or position information that may be used as feedback for adjusting lace tension.
- These sensors could also be implemented to control periods of sleep/awake to extend battery life. In some cases, for example, information from these sensors could be used to reduce tension in a system when the user is inactive, and increase tension during periods of greater activity.
- Some embodiments may use memory (for example onboard memory associated with a control unit) to store sensed data over time. This data may be stored for later upload and analysis. For example, one embodiment of an article of footwear may sense and store tension information over time that can be later evaluated to look at trends in tightening.
- memory for example onboard memory associated with a control unit
- some embodiments could incorporate pressure sensors to detect high pressure regions that may develop during tightening. In some cases, the tension of the lace could be automatically reduced to avoid such high pressure regions. Additionally, in some cases, a system could prompt a user to alter them to these high pressure regions and suggest ways of avoiding them (by altering use or fit of the article).
- a user could be provided with feedback through motor pulsing, which generates haptic feedback for the user in the form of vibrations/sounds.
- Such provisions could facilitate operation of a tensioning system directly, or provide haptic feedback for other systems in communication with a motorized tensioning device.
- a tensioning system may include provisions for readjusting lace tension to the initial tension set by the user.
- a control unit may be configured to monitor tension in those first minutes to then readjust tension to match original tension.
- FIG. 39 is a schematic view of an exemplary process for automatically readjusting lace tension to maintain the user desired tension over time.
- some of the following steps could be accomplished by a control unit 302 (see FIG. 5 ) associated with motorized tensioning device 160.
- some of the following steps could be accomplished by other components of a tensioning system. It will be understood that in other embodiments one or more of the following steps may be optional.
- control unit 302 may determine if a user has finished tightening an article. In some cases, control unit 302 may determine that a user has finished tightening a lace if no control commands (e.g., an incremental tighten command) have been received after a predetermined period of time. If control unit 302 determines that the user has finished tightening the article, control unit 302 proceeds to step 504. Otherwise, control unit 302 may wait until it has been determined that the user has finished tightening the article.
- control unit 302 may wait until it has been determined that the user has finished tightening the article.
- control unit 302 may monitor tension of the tensioning system (e.g., tension of a lace) for a predetermined interval to determine an initial tension. Methods for monitoring tension, including current sensors and other sensors have been previously discussed above. In some cases, control unit 302 may set the average measured tension over the predetermined interval as the initial tension.
- tensioning system e.g., tension of a lace
- control unit 302 may determine if the tension of the tensioning system has decreased. If not, control unit 302 may wait and then revaluate if the tension has decreased. Once it has been determined that the tension has decreased, control unit 302 may proceed to step 508. In step 508, control unit 302 may automatically increase the tension of the tensioning system until the initial tension has been achieved. In some embodiments, after step 508, control unit may wait and again automatically evaluate the tension at step 506. In some embodiments, control unit 302 may be additionally configured to automatically detect overtension and in response automatically decrease the tension of the tensioning system until the initial tension has been achieved. In some embodiments, control unit 302 may be configured to perform cyclic changes in tension, such as to enhance blood circulation.
- step 506 may be triggered by sensor information.
- sensor-based triggering may replace the waiting, with sensor information causing reevaluation of tension to occur.
- waiting may be performed as illustrated in FIG. 39 , but with sensor information possibly causing the waiting to be terminated and triggering reevaluation of tension.
- Sensors providing such information to control unit 302 might include, but are not limited to, pressure sensors in shoe insoles to detect standing and/or rate of motion, bend indicators, strain gauges, gyroscopes, and accelerometers.
- the sensor information may be used to establish a new target tension.
- pressure sensors could be used to measure contact pressures of the upper of an article of footwear against the foot of a wearer and automatically adjust to achieve a desired pressure.
- control unit 302 may be configured to store sensor information obtained over a period of time to identify triggering events. Additionally, control unit 302 may be configured to upload or otherwise provide stored sensor information to a remote device. Uploaded sensor information may be reviewed and analyzed for purposes including, but not limited to, monitoring correlations between footwear tightness and athletic performance.
- Some embodiments may be configured to operate in two or more different modes. For example, some embodiments could operate in a "normal mode” and a "game mode” (or similarly, a “sports mode” or “active mode”). In the normal mode, the electric motor would be powered down after tensioning in order to save battery life. In contrast, when the game mode is selected by a user, the tension of the system may be continuously monitored and adjusted for maximum performance though at the expense of battery life. By enabling a user to change between these two modes, a user can choose to optimize battery life or optimize performance depending on the needs of the situation.
- multiple target tensions may be stored and returned to, for either of the "normal mode” or the "game mode,” such as configuring a target tension for sport and a substantially different tension for leisure.
- control unit 302 may be configured to frequently, but not continuously, monitor and adjust tension, so as to further extend battery life while achieving some of the benefit of a continuously monitored "game mode.”
- FIG. 40 is a schematic view of an exemplary process for operating a tensioning system in two different modes.
- some of the following steps could be accomplished by a control unit 302 (see FIG. 5 ) associated with motorized tensioning device 160.
- some of the following steps could be accomplished by other components of a tensioning system. It will be understood that in other embodiments one or more of the following steps may be optional.
- control unit 302 may receive the user selected mode. This may be determined by receiving a signal from a remote device, which may prompt a user to select with a "normal mode" or a "game mode”.
- control unit 302 may determine if the user has finished tightening the article. If not, control unit 302 waits until the user has finished tightening the article. When the user has finished tightening the article, control unit 302 proceeds to step 514.
- control unit 302 determines which mode has been selected from the information received during step 510. If the user has selected the normal mode, control unit proceeds to step 516, where the motor is powered down and the system awaits further instructions from the user (or other systems/sensors) to save battery power. If, however, the user has selected the game mode at step 514, control unit 302 proceeds to step 518. During step 518, control unit 302 may actively monitor the tension of the article and may automatically adjust the tension to achieve maximum performance.
- GPS feedback from a remote device could be used to determine if a runner is on flat ground, climbing or descending.
- the system could automatically adjust the tension of the laces in footwear automatically, for example, by increasing tension in the laces during descent.
- Methods of digitally tracking tensioning data measured by one or more sensors could be used in some embodiments.
- the average tension of the device could also be tracked.
- This tension data may be used to measure performance parameters, such as loading on the foot during an athletic activity.
- tension monitoring may be used to measure swelling.
- the number of times the footwear is put on and taken off can be tracked.
- time of use could also be tracked.
- Data collection could be facilitated by various technologies including USB devices, data cords and blue tooth communication technologies.
- the data collected can be transmitted through a variety of technologies to either a central database for evaluation.
- FIGS. 39 and 40 are directed to footwear, it will be understood that similar methods could be used for automated operation of other kinds of articles including tensioning systems. In particular, these methods could be used with any type of apparel.
- FIG. 41 shows a schematic view of an alternative embodiment of a motorized tensioning device 900.
- FIG. 43 illustrates a cross sectional view of some components of motorized tensioning device 900.
- Motorized tensioning device 900 may include some similar provisions as the previous embodiments, for example a motor 902 and a gear reduction system 904 that is driven by motor 902.
- Gear reduction system 904 as shown here includes 5 stages of spur gears.
- Other gear reductions that could be employed include: cycloidal, harmonic, and planetary.
- the motor 902 and gear reduction system 904 combination may be sized to maximize the tradeoffs between current requirement, size, torque and speed. In the embodiment shown, the gear reduction is approximately 600:1 with an output RPM of 30 and a peak current of 1.2 amps.
- the output of gear reduction system 904 may enter an incrementally releasable load holding mechanism 906, which is shown in FIG. 42 .
- This load holding mechanism 906 comprises a ratcheting type mechanism, which helps hold any loads applied to spool 908 without potentially back driving motor 902 and/or gear reduction system 904. The purpose is to hold the load without relying on the motor/gearbox to not back drive.
- Load holding mechanism 906 may hold load on spool 908 even while motor 902 is de-energized. When a small amount of lace tension is desired to be released, motor 902 unwinds and a sweeper element sweeps pawl elements 910 off internal teeth 912 allowing the output to unwind one tooth.
- the output of load holding mechanism 906 in this embodiment is a male square drive 914.
- This drive element could be any number of sides or be an external spline.
- the male square drive mates with a female element 916 with sufficient clearance and of a material for low friction sliding along shaft 912 (see FIG. 43 ).
- the female element 916 is driven by the male square drive 914.
- the opposite end of female element 916 includes a face driving element 920. In the embodiment shown, this is a large number of triangular teeth which can engage or disengage from matching teeth on one flange of spool 908. These teeth could be from as few as one to more than eight. To encourage engagement the teeth may be back drafted from 5 to 60 degrees. In some embodiments, the teeth may be angled at approximately 45 degrees.
- the center of female element 916 has a thread (not shown) which can engage threaded portion of shaft 912.
- element 916 moves axially as a result of the internal thread and engages the face teeth between itself and corresponding teeth on spool 908.
- Shaft 912 which is normally stationary, has a frictional element 922 to prevent rotation during axial travel and engagement. When engagement is complete and the face teeth are fully engaged, the external thread of shaft 912 will experience torque. Over a certain torque level, motor 902 and gear reduction system 904 will overcome the torsional friction element 922 and shaft 912 will turn.
- frictional element 922 is an O-ring on shaft 912 that is contained in a housing.
- the O-ring pressure can be adjusted via a screw which can clamp down on the O-ring.
- this torsion friction could be accomplished by a number of means.
- torsional friction could be done as a coulomb frictional device such as an adjustable face clutch for instance using steel or brass against nylon or other brake pad materials and adjustable via an axial spring tensioner.
- torsional friction could also be done electrically via a particle clutch or hydraulically via a rotary damper.
- the number of turns to reach disengagement can be coordinated if desired with the number of turns to go from full lace tension to no tension. That way, incremental release can be done anywhere in the range of lace that is tensioned.
- rapid slack wind may be achieved via a constant force spring (not shown) that is stored on a freewheeling spool 930 and rewound onto one end 930 of spool 908.
- the lace may exit and is tended through radiused eyelets in a housing to prevent lace wear and increase lace fatigue life. In some embodiments, these exits may be located at least 1 ⁇ 2 of the spool diameter away from the spool to help the lace more or less level wind onto the spool to maximize capacity.
- a user initiated manual release element is also provided should the user every find themselves in tightened shoes with no remaining battery life.
- Many approaches could be used to manually disengage the spool from the load holding and motor/gearbox mechanism.
- a tapered blade (not shown) can be inserted between the teeth on spool 908 and element 916 to separate them via a spring element allowing axial movement of spool 908 in the separation direction.
- FIGS. 44 and 45 illustrate schematic views of an alternative tensioning and release mechanism that could be used with a motorized tightening system.
- this mechanism is shown in isolation from other components of a tightening device. This mechanism can be used for accomplishing tightening, load holding, incremental release and full release.
- load holding mechanism 938 includes a final stage output gear 940 of a gear reduction system (not shown) which is connected to a cylindrical plate 942 that has a single driving pawl 944 near its center.
- the motor In the tightening direction, the motor is continually driven and the pawl 944 drives via detents in an output ring 946 that is attached to the spool.
- This output ring 946 has internal detents 948 that plate 942 drives and external female teeth 950 that engage an external load holding pawl 954.
- the external load holding pawl 954 resists the spool torque.
- plate 942 not only has the internal drive pawl 944 but also has cam elements 945 on its periphery that periodically disengage the external load holding pawl 954. When stopped and holding load the external pawl is engaged 954. Then the cylindrical plate 942 begins to back up for an incremental release. At first the output does not release. Then one of cam elements 945 on plate 942 releases outside load holding pawl 954. When this happens, output ring 946 catches up to pawl 954 and next the load holding pawl 954 engages and the mechanism stops in an incremental load holding position. In this way incremental release is accomplished. For this to operate a limit switch is employed to monitor plate 942 and stop in each incremental release position. In the embodiment shown there are six stop positions or every 60 degrees of rotation. This number can vary based on space requirements and the incremental lace release resolution desired. There could be as few as 1 stop per revolution and as many as 12, for example.
- pawl 960 has three positions. Fully retracted, actuator extended, and releasing cam extended. After tensioning, pawl 960 is fully retracted. As incremental releases are actuated, the internal pawl 944 will likely pass this external pawl 960 and set it to the full release position. So when a full release is commanded, the internal pawl 944 will move into a position where both internal and external pawls are lifted and the user can freely extract lace and take off the article while only encountering minimal resistance which is provided by the slack take up mechanism.
- FIG. 46 illustrates an exemplary embodiment of an article of footwear 3010 including an upper 3155 and a sole structure 3150 secured to upper 3155.
- sole structure 3150 may include a midsole 3151 and an insole 3054.
- Insole 3054 may be removably inserted into footwear 3010, as illustrated by an arrow 3055.
- FIG. 46 also shows a motorized tensioning system 3020, which may be removably attached to footwear 3010.
- Footwear 3010 and tensioning system 3020 may have the same or similar attributes as footwear and tensioning systems discussed above.
- tensioning system may include a tightening device, power source, and other componentry in a housing 3025, which may be removably attached to upper 3155, for example, on a heel portion of footwear 3010.
- footwear 3010 may include various additional components disposed in sole structure 3150.
- footwear 3010 may include a cushioning element 3080 in a heel portion of sole structure 3150.
- Cushioning element 3080 may be incorporated into midsole 3151.
- cushioning element 3080 may include a chamber containing a pressurized fluid.
- cushioning element 3080 may include a foam cushioning material.
- footwear 3010 may include a removable electronics device 3065 in the heel portion of sole structure 3150.
- Electronics device 3065 may be removably inserted into a recess 3060 in midsole 3151 beneath insole 3054, as indicated by an arrow 3070.
- Electronics device 3065 may include a data acquisition component 3075 configured to collect performance data.
- footwear 3010 may include both cushioning element 3080 and electronics device 3065.
- cushioning element 3080 may be located in the heel region of midsole 3151 and electronics device 3060 may be located in the midfoot region of midsole 3151.
- midsole 3151 may have a height that is relatively minimal, the placement of cushioning element 3080 and electronics package 3060 in midsole 3151 may leave little room for additional componentry in sole structure 3150. Accordingly, the attachability of housing 3025 of tensioning system 3020 to an outer heel portion of upper 3155 may enable use of motorized tightening in footwear that includes componentry incorporated into midsole 3151.
- the motorized tensioning system may incorporate a different arrangement of components.
- a motorized tensioning system 4125 may be removably attachable to an article of footwear 4010.
- the components and operation of tensioning system 4125 may be similar to other tensioning systems discussed above.
- tensioning system 4125 may include a housing 4126 that is removably attachable to a heel portion of footwear 4010.
- housing 4126 may house a motorized tightening device 4200, a power source 4205 and a control unit 4210.
- tightening device 4200 may be disposed on a medial or lateral side of footwear 4010 when tensioning system 4125 is installed on footwear 4010.
- power source 4205 may be disposed in a rear-most portion of the heel portion of footwear 4010 when tensioning system 4125 is installed on footwear 4010. This arrangement may be advantageous in some cases, for example, when tightening device 4200 has a lower profile than power source 4205. It may be desirable to maintain a minimal width of tensioning system 4125, and thus, it may be preferred to house a larger sized battery on the rear-most portion of the heel portion.
- an article of footwear 5010 may include a lacing region 5175 that is located on a medial or lateral side of footwear 5010.
- a lacing arrangement may provide improved fit, and may enable snug tightening without placing undue pressure on various portions of the foot, such as the instep region.
- locating lacing region 5175 away from the instep region may enable a relatively smooth surface of footwear 5010 to be presented in the instep region. This smooth surface may be desirable for soccer, to improve kicking accuracy and prevent impact of uneven materials with the foot.
- a motorized tensioning system 5125 may be removably attachable to footwear 5010, and may include similar components to the tensioning systems discussed above.
- tensioning system 5125 may include a motorized tightening device, a power source, and a control unit housed within a housing 5126.
- Tensioning system 5125 may also include a tensile member.
- the tensile member may include multiple portions connectible with manual couplings, such as connector 5035.
- the tensile member may include a first tensile member portion 5130 associated with housing 5126.
- the tensile member may include a second tensile member portion 5135 and a third tensile member portion 5136, which may be laced through lacing region 5175. Because both ends of first tensile member portion 5130 may enter housing 5126 on the same side of footwear 5010, it may be desirable to locate the tightening device on the side of footwear 5010 nearest the entry point of first tensile member portion 5130.
- Motorized tensioning systems that are heel-mounted may enable other lacing configurations to be used. For example, because the lace tension in a heel-mounted tensioning system is being applied from the heel region, and because the tensioning is automated, the lacing region need not be exposed. Accordingly, concealed lacing systems may be used. For example, in some embodiments, a lacing system is envisaged in which the lacing region is underfoot in the sole structure of the shoe.
- FIG. 49 shows an article of footwear 6010.
- Footwear 6010 may include a sole structure 6150 and an upper 6155 secured to sole structure 6150.
- FIG. 49 shows a motorized tensioning system 6125.
- Tensioning system 6125 may be removably attachable to footwear 6010, and may include similar components to the tensioning systems discussed above.
- tensioning system 6125 may include a motorized tightening device, a power source, and a control unit housed within a housing 6126.
- Tensioning system 6125 may also include a tensile member.
- the tensile member may include multiple portions connectible with manual couplings.
- the tensile member may include a first tensile member portion 6130 associated with housing 6126.
- the tensile member may include a second tensile member portion 6136 which may be laced into a lacing region 6175. Second tensile member portion 6136 may be removably attached to first tensile member portion 6130 by manual couplings 6140. Accordingly, housing 6126 and its contents, as well as first tensile member portion may be replaced due to the removability of housing 6126 from upper 6155 and manual couplings 6140.
- lacing region 6175 may be located internally, for example, in a footbed 6005 of sole structure 6150.
- Second tensile member portion 6136 may enter sole structure 6150 proximate a first peripheral edge 6025 and a second peripheral edge 6030 of footbed 6005. Further, second tensile member portion 6136 may be disposed in a groove 6020 in footbed 6005. Second tensile member portion 6136 may extend between anchor members that are located proximate first peripheral edge 6025 and second peripheral edge 6030 of footbed 6005. For example, a first anchor member 6011, a second anchor member 6012, and a third anchor member 6013 may be located proximate first peripheral edge 6025.
- a fourth anchor member 6014, a fifth anchor member 6015, and a third anchor member 6016 may be located proximate second peripheral edge 6030. These anchor members may be secured to upper 6155. When tensioning system 6125 applies tension to the tensile member, second tensile member portion 6136 may draw the anchor members closer to one another, thus tightening upper 6155 around the foot. Additional details of exemplary footbed lacing systems are provided in Baker et al., U.S. Patent No. 8,387,282, issued March 5, 2013 , and entitled "Cable Tightening System for an Article of Footwear".
Landscapes
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Footwear And Its Accessory, Manufacturing Method And Apparatuses (AREA)
Description
- The present embodiments relate generally to articles of footwear and including removable motorized adjustment systems.
- Articles of footwear generally include two primary elements: an upper and a sole structure. The upper is often formed from a plurality of material elements (e.g., textiles, polymer sheet layers, foam layers, leather, synthetic leather) that are stitched or adhesively bonded together to form a void on the interior of the footwear for comfortably and securely receiving a foot. More particularly, the upper forms a structure that extends over instep and toe areas of the foot, along medial and lateral sides of the foot, and around a heel area of the foot. The upper may also incorporate a lacing system to adjust the fit of the footwear, as well as permitting entry and removal of the foot from the void within the upper. Likewise, some articles of apparel may include various kinds of closure systems for adjusting the fit of the apparel.
WO 01/15559 A1
US 5 157 813 A describes a shoelace tensioning device, which is mounted on the top of a shoe and which is has a hook mechanism wound onto a drum within the device for tensioning of the shoelace ends.
Thus, according to an aspect, the problem relates to improving operability of lacing of an article of footwear. - The invention relates to an article of footwear as specified in appended
independent claim 1, a method of changing a lacing system of an article of footwear as specified in appendedindependent claim 12, and a motorized footwear lacing system as specified in appendedindependent claim 14. Preferred embodiments of the invention are disclosed in the dependent claims. - Other systems, methods, features and advantages of the embodiments will be, or will become, apparent to one of ordinary skill in the art upon examination of the following figures and detailed description. It is intended that all such additional systems, methods, features and advantages be included within this description and this summary, be within the scope of the embodiments, and be protected by the following claims.
- The embodiments can be better understood with reference to the following drawings and description. The components in the figures are not necessarily to scale, emphasis instead being placed upon illustrating the principles of the invention. Moreover, in the figures, like reference numerals designate corresponding parts throughout the different views.
-
FIG. 1 is a schematic illustration of an embodiment of a kit of parts including an article of footwear, a motorized tensioning system, and a remote device for controlling the tensioning system; -
FIG. 2 is an exploded view of an embodiment of an article of footwear and an attachable motorized tensioning system; -
FIG. 3 is a perspective, assembled view of an embodiment of an article of footwear and an attachable motorized tensioning system; -
FIG. 4 is a partial cutaway view of the attachable motorized tensioning system; -
FIG. 5 is a top down schematic view of a portion of an article of footwear including a removable adjustment apparatus, in which the locations of a motorized tensioning device, a control unit, and a battery pack are indicated schematically; -
FIG. 6 is a schematic isometric view of an embodiment of a manual release mechanism for a tensioning system including a motorized tensioning device; -
FIG. 7 is a schematic view of an embodiment of another manual release mechanism for a tensioning system including a motorized tensioning device; -
FIG. 8 is a schematic isometric view of an embodiment of a motorized tensioning device with an outer cover of the housing unit removed; -
FIG. 9 is a schematic exploded isometric view of an embodiment of some components of a motorized tensioning device; -
FIG. 10 is a schematic exploded isometric view of an embodiment of a ratcheting assembly; -
FIG. 11 is a schematic isometric view of a portion of a motorized tensioning system showing a ratcheting assembly clamped to a spool; -
FIG. 12 is a schematic isometric view of an embodiment of a shaft and a rotational control assembly; -
FIG. 13 is a schematic isometric view of a portion of a motorized tensioning system showing a rotational control assembly engaging a spool; -
FIG. 14 is another schematic isometric view of a portion of the rotational control assembly ofFIG. 13 ; -
FIG. 15 is a schematic isometric view of an embodiment of a spool; -
FIG. 16 is a side schematic view of an embodiment of a torque transmitting system; -
FIG. 17 is a side schematic view of an embodiment of a torque transmitting system in a fully loosened configuration; -
FIG. 18 is a side schematic view of an embodiment of a torque transmitting system in an incremental tightening configuration; -
FIG. 19 is a side schematic view of an embodiment of a torque transmitting system in an incremental tightening configuration; -
FIG. 20 is a schematic isometric view of a portion of a torque transmitting system as a gear contacts a ratcheting assembly; -
FIG. 21 is a schematic isometric view of the portion of torque transmitting system ofFIG. 20 , in which the gear, ratcheting assembly and spool are clamped together and the spool is rotated; -
FIG. 22 is a side schematic isometric view of a torque transmitting system in an incremental loosening configuration; -
FIG. 23 is a schematic isometric view of a torque transmitting system in a first stage of an incremental loosening configuration; -
FIG. 24 is a schematic isometric view of a torque transmitting system in a second stage of an incremental loosening configuration; -
FIG. 25 is a schematic isometric view of a torque transmitting system in a third stage of an incremental loosening configuration; -
FIG. 26 is a schematic side view of an embodiment of a torque transmitting system transitioning to a full loosening configuration; -
FIG. 27 is a schematic isometric view of a secondary winding assembly operating while a lace is being wound onto a spool; -
FIG. 28 is a schematic isometric view of a secondary winding assembly operating while a lace is being unwound from a spool due to tension on the lace; -
FIG. 29 is a schematic isometric view of a secondary winding assembly operating when a lace has developed some slack near the spool; -
FIG. 30 is a schematic isometric view of motorized tensioning device including an alternative configuration for a secondary winding assembly; -
FIG. 31 is a schematic isometric view of an embodiment of an article of footwear with a tensioning system and a remote device for controlling the tensioning system; -
FIG. 32 is a schematic view of an embodiment of a remote device running a lacing control application; -
FIG. 33 is a schematic view of an embodiment of a foot being inserted into an article and a remote device running a lacing control application; -
FIG. 34 is a schematic view of an embodiment of a foot fully inserted into an article and a remote device running a lacing control application; -
FIG. 35 is a schematic view of an embodiment of an article being tightened as a remote device sends an incremental tighten command to a tensioning system; -
FIG. 36 is a schematic view of an embodiment of an article being loosened as a remote device sends an incremental loosen command to a tensioning system; -
FIG. 37 is a schematic view of an embodiment of an article opened to allow a foot to be removed after a remote device has sent an open command to a tensioning system; -
FIG. 38 is a schematic isometric view of an embodiment of an article of footwear including a tensioning system and a remote bracelet configured to control a motorized tensioning device of the tensioning system; -
FIG. 39 is a schematic process for automatically controlling tension in an article to maintain an initial tension; -
FIG. 40 is a schematic process for automatically controlling tension according to a user selected tensioning mode; -
FIG. 41 is a schematic isometric view of an alternative embodiment of a motorized tensioning device; -
FIG. 42 is an enlarged isometric view of a load-holding mechanism of the motorized tensioning device ofFIG. 41 ; -
FIG. 43 is a cut-away view of an embodiment of a portion of a motorized tensioning device; -
FIG. 44 is an isometric view of another embodiment of a load holding mechanism for a motorized tensioning device; -
FIG. 45 is an isometric view of the load holding mechanism ofFIG. 44 , in which an output ring has been removed; -
FIG. 46 is a schematic view of an article of footwear having an attachable tensioning system and showing select components of a sole structure of the footwear; -
FIG. 47 is a schematic view of another embodiment of an article of footwear having an attachable tensioning system; -
FIG. 48 is a schematic view of another embodiment of an article of footwear having an attachable tensioning system; and -
FIG. 49 is a schematic view of another embodiment of an article of footwear having an attachable tensioning system. - The following discussion and accompanying figures disclose articles of footwear and motorized lacing systems for the footwear. Concepts associated with the footwear disclosed herein may be applied to a variety of athletic footwear types, including running shoes, basketball shoes, soccer shoes, baseball shoes, football shoes, and golf shoes, for example. Accordingly, the concepts disclosed herein apply to a wide variety of footwear types.
- To assist and clarify the subsequent description of various embodiments, various terms are defined herein. Unless otherwise indicated, the following definitions apply throughout this specification (including the claims). For consistency and convenience, directional adjectives are employed throughout this detailed description corresponding to the illustrated embodiments.
- The term "longitudinal," as used throughout this detailed description and in the claims, refers to a direction extending a length of a component. For example, a longitudinal direction of an article of footwear extends from a forefoot region to a heel region of the article of footwear. The term "forward" is used to refer to the general direction in which the toes of a foot point, and the term "rearward" is used to refer to the opposite direction, i.e., the direction in which the heel of the foot is facing.
- The term "lateral direction," as used throughout this detailed description and in the claims, refers to a side-to-side direction extending a width of a component. In other words, the lateral direction may extend between a medial side and a lateral side of an article of footwear, with the lateral side of the article of footwear being the surface that faces away from the other foot, and the medial side being the surface that faces toward the other foot.
- The term "side," as used in this specification and in the claims, refers to any portion of a component facing generally in a lateral, medial, forward, or rearward direction, as opposed to an upward or downward direction.
- The term "vertical," as used throughout this detailed description and in the claims, refers to a direction generally perpendicular to both the lateral and longitudinal directions. For example, in cases where a sole is planted flat on a ground surface, the vertical direction may extend from the ground surface upward. It will be understood that each of these directional adjectives may be applied to individual components of a sole. The term "upward" refers to the vertical direction heading away from a ground surface, while the term "downward" refers to the vertical direction heading towards the ground surface. Similarly, the terms "top," "upper," and other similar terms refer to the portion of an object substantially furthest from the ground in a vertical direction, and the terms "bottom," "lower," and other similar terms refer to the portion of an object substantially closest to the ground in a vertical direction.
- The "interior" of a shoe refers to space that is occupied by a wearer's foot when the shoe is worn. The "inner side" of a panel or other shoe element refers to the face of that panel or element that is (or will be) oriented toward the shoe interior in a completed shoe. The "outer side" or "exterior" of an element refers to the face of that element that is (or will be) oriented away from the shoe interior in the completed shoe. In some cases, the inner side of an element may have other elements between that inner side and the interior in the completed shoe. Similarly, an outer side of an element may have other elements between that outer side and the space external to the completed shoe. Further, the terms "inward" and "inwardly" shall refer to the direction toward the interior of the shoe, and the terms "outward" and "outwardly" shall refer to the direction toward the exterior of the shoe.
- For purposes of this disclosure, the foregoing directional terms, when used in reference to an article of footwear, shall refer to the article of footwear when sitting in an upright position, with the sole facing groundward, that is, as it would be positioned when worn by a wearer standing on a substantially level surface.
- In addition, for purposes of this disclosure, the term "fixedly attached" shall refer to two components joined in a manner such that the components may not be readily separated (for example, without destroying one or both of the components). Exemplary modalities of fixed attachment may include joining with permanent adhesive, rivets, stitches, nails, staples, welding or other thermal bonding, or other joining techniques. In addition, two components may be "fixedly attached" by virtue of being integrally formed, for example, in a molding process.
- For purposes of this disclosure, the term "removably attached" shall refer to the joining of two components in a manner such that the two components are secured together, but may be readily detached from one another. Examples of removable attachment mechanisms may include hook and loop fasteners, friction fit connections, interference fit connections, threaded connectors, cam-locking connectors, and other such readily detachable connectors.
- A motorized footwear lacing system may include an article of footwear, a manual lace, and a motorized tensioning system. The motorized tensioning system includes a tensile member and a motorized tightening device that are removable and interchangeable with the manual lace. In some embodiments, the lacing system may be provided as a kit of parts, including a container in which a pair of footwear, a pair of motorized tensioning systems, and a pair of manual laces may be provided. In some embodiments, the motorized tightening device may be removably attached to the heel portion of the article of footwear. The tensile member may include a cord or other lace-like member that attaches to the motorized tightening device. In some embodiments, the cord may be laced through eye stays in a lacing region of the article of footwear. Accordingly, when the motorized tightening device and the tensile member are removed from the footwear, the manual lace may be laced into the same eye stays in which the tensile member is used.
- The motorized tensioning system enables relatively rapid tightening of the footwear. In addition, in some embodiments the tightening system may provide incremental tightening. Such incremental tightening may enable the user to achieve a predictable tightness for each wearing. In some embodiments, sensors may be included to monitor tightness. In such embodiments, the user may also achieve a predictable tightness.
- In some cases, using a motorized tensioning device may remove dexterity issues that may occur with other tensioning technologies (pulling straps, Velcro, and other such manual closure systems). Such a design could improve the use of footwear for physically impaired or injured individuals who may otherwise have a hard time putting on and adjusting their footwear. Using the designs proposed here, footwear could be tightened via a push button or remote interface.
- In some embodiments, the tensioning system may be remotely controlled, for example by a bracelet or hand-held device. In such embodiments, adjustments may be made without the wearer having to stop the activity in which they are participating. For example, a distance runner may adjust the tightness of their footwear without interrupting their workout or competitive event.
- In addition, the tensioning system may also be configured to make automatic adjustments. For example, using tightness sensors, the system may be configured to maintain tightness during wear by adjusting tightness according to changes in the fit. For example, as feet swell during wear, the tensioning system may release tension on the tensile member, in order to maintain the initially selected tightness.
- In addition, the tensioning system may be configured to adjust the tightness during use to improve performance. For example, as a wearer places loads on the footwear during an athletic activity, the system may tighten or loosen the tensile members to achieve desired performance characteristics. For example, as a runner proceeds around a curve, the tensioning system may tighten the footwear in order to provide additional stability and maintain the foot in a centralized position within the footwear. As another example, when a runner is running downhill, the tightening system may loosen the footwear to limit additional forces exerted on the foot as the foot tends to slide toward the front of the footwear during the downhill run. Numerous other automated adjustments may be utilized for performance. Such automated adjustments may vary for each activity. In addition, the type and amount of such adjustments may be preselected by the user. For instance, using the examples above, the user may select whether to tighten or loosen the footwear while proceeding around a curve. In addition, the user may select whether to utilize an automated adjustment at all during certain conditions. For example, the user may choose to implement the adjustment while proceeding around curves, but may opt not to utilize an adjustment when running downhill.
- Providing the motorized tensioning system as removable from the article of footwear may enable the footwear to be used conventionally. In addition, removability of the tensioning system may enable components of the tensioning system to be repaired or replaced independent of the footwear. In addition, removability of the tensioning system enables the footwear to be repaired or replaced independent of the tensioning system.
-
FIG. 1 illustrates a motorizedfootwear lacing system 1100. As shown inFIG. 1 ,system 1100 is a kit of parts. The kit of parts includes acontainer 1105 configured to store components of the motorizedfootwear lacing system 1100.System 1100 includes a first article offootwear 1100.System 1100 also includes a firstmanual lace 1116 configured to be laced intofootwear 1110 in a conventional manner.Lace 1116 may be utilized to modify the dimensions ofinterior void 1165, thereby securing the foot of a wearer withininterior void 1165 and facilitating entry and removal of the foot frominterior void 1165. -
System 1100 includes a firstmotorized tensioning system 1120, which includes a first tensile member and a firstmotorized tightening device 1125 configured to apply tension in the tensile member to adjust the size of an internal void defined byfootwear 1110. The term "tensile member," as used throughout this detailed description and in the claims, refers to any component that has a generally elongated shape and high tensile strength. In some cases, a tensile member could also have a generally low elasticity. Examples of different tensile members include, but are not limited to: laces, cables, straps and cords. In some cases, tensile members may be used to fasten and/or tighten an article footwear. In other cases, tensile members may be used to apply tension at a predetermined location for purposes of actuating some components or system. - The tensile member is provided in sections. The tensile member includes a first
tensile member portion 1130, associated with tighteningdevice 1125 and extending throughmotorized tightening device 1125, as shown inFIG. 1 . In addition, the tensile member includes a secondtensile member portion 1135, which is configured to be releasably attached to firsttensile member portion 1130. Also, the tensile member may include a thirdtensile member portion 1136, which may be attachable to firsttensile member portion 1130. Secondtensile member portion 1135 and thirdtensile member portion 1136 may be laced intofootwear 1110, and thus, replacemanual lace 1116. Once secondtensile member portion 1135 and thirdtensile member portion 1136 are laced intofootwear 1110, secondtensile member portion 1135 may be releasably fastened to thirdtensile member portion 1136. -
Motorized tightening device 1125 and the tensile member are removably attached tofootwear 1110. In addition,manual lace 1116 may be interchangeable with the tensile member andmotorized tightening device 1125. - In some embodiments,
system 1100 may include a pair of footwear and thus may include a second article offootwear 1111. Further, sincesystem 1100 may include a pair of footwear, the other components ofsystem 1100 may also be provided in pairs. For example,system 1100 may include a secondmanual lace 1115. In addition,system 1100 may include a secondmotorized tensioning system 1121. Secondmotorized tensioning system 1121 may include a secondmotorized tensioning device 1126. Secondmotorized tensioning system 1121 may also include a second tensile member, including a fourthtensile member portion 1131, a fifthtensile member portion 1140, and a sixthtensile member portion 1141. For purposes of description, only one of each pair of components will be discussed in detail below. - As further shown in
FIG. 1 , motorizedfootwear lacing system 1100 may include aremote device 1145 configured to controlmotorized tightening device 1125. In some embodiments,remote device 1145 may be provided in the form of a bracelet, as shown inFIG. 1 . For example,remote device 1145 may be implemented as a function of a watch. In some embodiments,remote device 1145 may be a hand-held device. For example,remote device 1145 may be implemented as a function of a mobile telephone or other mobile device. -
Container 1105 may be configured to contain the pair of footwear, the pair of manual laces, and the pair of motorized tensioning systems, including the tensile members and the pair of motorized tightening devices. As shown inFIG. 1 , in some embodiments,container 1105 may be a box, such as a shoe box. -
FIG. 2 illustrates the association betweentensioning system 1120 andfootwear 1110. For reference purposes,footwear 1110 may be divided into three general regions: aforefoot region 10, amidfoot region 12, and aheel region 14.Forefoot region 10 generally includes portions offootwear 1110 corresponding with the toes and the joints connecting the metatarsals with the phalanges.Midfoot region 12 generally includes portions offootwear 1110 corresponding with an arch area of the foot.Heel region 14 generally corresponds with rear portions of the foot, including the calcaneus bone.Forefoot region 10,midfoot region 12, andheel region 14 are not intended to demarcate precise areas offootwear 1110. Rather,forefoot region 10,midfoot region 12, andheel region 14 are intended to represent general relative areas offootwear 1110 to aid in the following discussion. Since various features offootwear 1110 extend beyond one region offootwear 1110, theterms forefoot region 10,midfoot region 12, andheel region 14 apply not only tofootwear 1110, but also to the various features offootwear 1110. -
Footwear 1110 may include asole structure 1150 and an upper 1155 secured tosole structure 1150. As shown inFIG. 2 , upper 1155 may include one or more material elements (for example, meshes, textiles, foam, leather, and synthetic leather), which may be joined to define aninterior void 1165 configured to receive a foot of a wearer. The material elements may be selected and arranged to selectively impart properties such as light weight, durability, air-permeability, wear-resistance, flexibility, and comfort. Upper 1155 may define athroat opening 1160 through which a foot of a wearer may be received intovoid 1165. -
Sole structure 1150 may be fixedly attached to upper 1155 (for example, with adhesive, stitching, welding, or other suitable techniques) and may have a configuration that extends between upper 1155 and the ground.Sole structure 1150 may include provisions for attenuating ground reaction forces (that is, cushioning and stabilizing the foot during vertical and horizontal loading). In addition,sole structure 1150 may be configured to provide traction, impart stability, and control or limit various foot motions, such as pronation, supination, or other motions. - The configuration of
sole structure 1150 may vary significantly according to one or more types of ground surfaces on whichsole structure 1155 may be used. For example, the disclosed concepts may be applicable to footwear configured for use on any of a variety of surfaces, including indoor surfaces or outdoor surfaces. The configuration of sole structure 11150 may vary based on the properties and conditions of the surfaces on whichfootwear 1110 is anticipated to be used. For example,sole structure 1150 may vary depending on whether the surface is harder or softer. In addition,sole structure 1150 may be tailored for use in wet or dry conditions. - In some embodiments,
sole structure 1150 may be configured for a particularly specialized surface or condition. For example, in some embodiments,footwear 1110 is illustrated in the accompanying figures as a running shoe and, accordingly, the illustratedsole structure 1150 is configured for providing cushioning, stability, and traction on hard, smooth surfaces, such as pavement. The proposed footwear upper construction may be applicable to any kind of footwear, however, such as basketball, soccer, football, and other athletic activities. Accordingly, in some embodiments,sole structure 1150 may be configured to provide traction and stability on hard indoor surfaces (such as hardwood), soft, natural turf surfaces, or on hard, artificial turf surfaces. In some embodiments,sole structure 1150 may be configured for use on a multiple different surfaces. - In some embodiments,
sole structure 1150 may include multiple components, which may individually or collectively providefootwear 1110 with a number of attributes, such as support, rigidity, flexibility, stability, cushioning, comfort, reduced weight, or other attributes. In some embodiments,sole structure 1150 may include an insole/sockliner (SeeFIG. 46 ), amidsole 1151, and a ground-contacting outersole member 1152, which may have an exposed, ground-contactinglower surface 1153, as shown inFIG. 2 . In some cases, however, one or more of these components may be omitted. - The insole may be disposed in void 1165 defined by upper 1155. The insole may extend through each of
forefoot region 10,midfoot region 12, andheel region 14, and between a lateral side and medial side offootwear 1110. The insole may be formed of a deformable (for example, compressible) material, such as polyurethane foams, or other polymer foam materials. Accordingly, the insole may, by virtue of its compressibility, provide cushioning, and may also conform to the foot in order to provide comfort, support, and stability. -
Midsole 1151 may be fixedly attached to a lower area of upper 1155 (for example, through stitching, adhesive bonding, thermal bonding (such as welding), or other techniques), or may be integral with upper 1155.Midsole 1151 may extend through each offorefoot region 10,midfoot region 12, andheel region 14, and between a lateral side and medial side offootwear 100. In some embodiments, portions ofmidsole 1151 may be exposed around the periphery offootwear 1110, as shown inFIG. 2 . In other embodiments,midsole 1151 may be completely covered by other elements, such as material layers from upper 1155.Midsole 1151 may be formed from any suitable material having the properties described above, according to the activity for whichfootwear 1110 is intended. In some embodiments,midsole 160 may include a foamed polymer material, such as polyurethane (PU), ethyl vinyl acetate (EVA), or any other suitable material that operates to attenuate ground reaction forces assole structure 1150 contacts the ground during walking, running, or other ambulatory activities. - As shown in
FIG. 2 ,footwear 1110 may include a tongue 2270, which may be provided in alacing region 1175. In some embodiments, lacingregion 1175 may be provided in an instep region offootwear 1110, as shown inFIG. 2 . However, in other embodiments, the lacing region may be provided in other portions of the article of footwear. (SeeFIGS. 48 and49 .) - As shown in
FIG. 2 ,footwear 1110 may include a plurality of eye stays in lacingregion 1175 configured to receive a lace. For example,footwear 1110 may include afirst eye stay 1181, asecond eye stay 1182, athird eye stay 1183, and afourth eye stay 1184 on a first side of lacingregion 1175. In addition,footwear 1110 may include afifth eye stay 1185, asixth eye stay 1186, aseventh eye stay 1187, and aneighth eye stay 1188 on a second side of lacingregion 1175. The eye stays are illustrated schematically inFIG. 2 , and may have any suitable configuration that will accept a conventional shoelace as well as the tensile member oftensioning system 1120. -
FIG. 2 schematically illustrates the placement ofmotorized tensioning system 1120 when removably attached tofootwear 1110. As illustrated by a dashedoutline 1137,tensioning system 1120 may be removably attached toheel region 14 offootwear 1110.Motorized tightening device 1125 may be disposed in ahousing 1190, which may have a shape that conforms with the heel counter offootwear 1110. - As shown in
FIG. 2 ,housing 1190 may have afirst surface 1127 configured to mate with asecond surface 1128 on upper 1155 offootwear 1110. In some embodiments,first surface 1127 andsecond surface 1128 may be removably attached with a hook andloop fastener material 1129. In other embodiments,first surface 1127 andsecond surface 1128 may be removably attached with a tongue and groove configuration, including atongue 2300 andgroove 2305.Tongue 2300 andgroove 2305 are shown oriented in a substantially horizontal position for purposes of illustration. As implemented,tongue 2300 andgroove 2305 may be oriented vertically. In such a vertical orientation,housing 1190 may be slid vertically into position. In other embodiments,first surface 1127 andsecond surface 1128 may be removably attached with an interference fit or friction fit. For example, a first protrudingportion 2310 may extend into arecess 2315 in an interference fit. The components of such a friction fit attachment may have any suitable orientation. - It will be noted that the components of these connections may be disposed on either
first surface 1127 orsecond surface 1128. For example, the hook component of the hook andloop fastener 1129 may be located on eitherfirst surface 1127 orsecond surface 1128. The loop component of hook andloop fastener 1129 may be disposed on the opposing surface to the hook component. Similarly,tongue 2300 may be located on eitherfirst surface 1127 orsecond surface 1128 andgroove 2305 may be located on the opposing surface fromtongue 2300. Further, protrudingportion 2310 may be located on eitherfirst surface 1127 orsecond surface 1128 andrecess 2315 may be located on the opposing surface from protrudingportion 2310. These disclosed removable connections are intended to be exemplary only. Alternative types of removable connections are also possible including, for example, threaded fasteners, cam-lock fasteners, spring clip type fasteners, and other removable connection mechanisms. - As shown in
FIG. 2 by dashedline 1137, the tensile member may be laced through the eyelets in lacingregion 1175, in the same or similar manner as a manual lace. For example, thirdtensile member portion 1135 may be threaded through fifth eyelet 185,second eyelet 182,seventh eyelet 1187, andfourth eyelet 1184. Similarly, fourthtensile member portion 1136 may be threaded throughfirst eyelet 1181,sixth eyelet 1186,third eyelet 1183, andeighth eyelet 1188. Since thirdtensile member portion 1135 and fourthtensile member portion 1136 may be detachable from firsttensile member portion 1130, thirdtensile member portion 1135 and fourthtensile member portion 1136 may be laced through the eyelets from either end. It will be noted that the mechanical connectors connecting the portions of the tensile member together are shown schematically and are shown enlarged for purposes of illustration. For example, acoupling 1235 at the distal ends of thirdtensile member portion 1135 an fourthtensile member portion 1136 may include afirst connector portion 1240 and asecond connector portion 1245.First connector portion 1240 and secondfemale portion 1245 may be sized and configured to be laced through the eyelets in lacingregion 1175. - A method of changing the lacing system of
footwear 1110 may include removing the tensile member,motorized tightening device 1125, and a power source from the article of footwear and lacing a manual lace intofootwear 1110. In some embodiments, lacing a manual lace into the article of footwear includes lacing the manual lace into the eye stays from which the tensile member ofsystem 1120 was removed. The step of removingmotorized tightening device 1125 fromfootwear 1110 may include detachinghousing 1190 from upper 1155 offootwear 1110. -
FIG. 3 is a rear perspective view of article offootwear 1110 withtensioning system 1120 removably installed. As shown inFIG. 3 ,housing 1190 is removably attached to a heel portion offootwear 1110. In addition, thirdtensile member portion 1135 and fourthtensile member portion 1136 are laced into the eye stays, includingfirst eye stay 1181,second eye stay 1182,fifth eye stay 1185, andsixth eye stay 1186. The remainder of the lacing region has been truncated inFIG. 3 for purposes of illustration. - As shown in
FIG. 3 ,tensioning system 1120 may includemotorized tightening device 1125 configured to apply tension in the tensile member to adjust the size ofinternal void 1165 defined byfootwear 1110. Tightening device may be disposed withinhousing 1190. - As also shown in
FIG. 3 ,system 1120 may include apower source 1205 configured to supply power tomotorized tightening device 1125.Housing 1190 may be configured to housemotorized tightening device 1125 andpower source 1205, as well as firsttensile member portion 1130. - In some embodiments,
power source 1205 may include one or more batteries.Power source 1205 is only intended as a schematic representation of one or more types of battery technologies that could be used to powermotorized tightening device 1125. One possibly battery technology that could be used is a lithium polymer battery. The battery (or batteries) could be rechargeable or replaceable units packaged as flat, cylindrical, or coin shaped. In addition, batteries could be single cell or cells in series or parallel. - Rechargeable batteries could be recharged in place or removed from an article for recharging. In some embodiments, charging circuitry could be built in and on board. In other embodiments, charging circuitry could be located in a remote charger. In another embodiment, inductive charging could be used for charging one or more batteries. For example, a charging antenna could be disposed in a sole structure of an article and the article could then be placed on a charging mat to recharge the batteries.
- Additional provisions could be incorporated to maximize battery power and/or otherwise improve use. For example, it is also contemplated that batteries could be used in combination with super caps to handle peak current requirements. In other embodiments, energy harvesting techniques could be incorporated which utilize the weight of the runner and each step to generate power for charging a battery.
-
FIG. 4 is a rear perspective view ofmotorized tensioning system 1120.FIG. 4 includes a cutaway view ofhousing 1190 exposing components ofsystem 1120 located withinhousing 1190. For example,FIG. 4 shows motorizedtightening device 1125.FIG. 4 shows an outer housing of tighteningdevice 1125. The inner winding mechanisms of tighteningdevice 1125 are discussed in greater detail below. As shown inFIG. 4 ,tightening device 1125 may be configured to apply tension to the tensile member by drawing firsttensile member portion 1130 into tighteningdevice 1125, as illustrated by afirst arrow 1225 and asecond arrow 1230. It will be noted that the routing of firsttensile member portion 1130 is merely schematic, and more complicated arrangements for such routing are possible. - Also exposed in
FIG. 4 ispower source 1205, as well as acontrol unit 1215.Control unit 1215 may include various circuitry components. In addition,control unit 1215 may include a processor, configured to controlmotorized tightening device 1125. As shown inFIG. 4 ,tensioning system 1120 may include a firstelectrical cable 1210 extending betweenpower source 1205 andmotorized tightening device 1125. In addition, a secondelectrical cable 1220 may extend betweencontrol unit 1215 andtightening device 1125. Firstelectrical cable 1210 and secondelectrical cable 1220 may be configured to deliver electrical power, as well as electronic communication signals, betweenpower source 1205, tighteningdevice 1125, andcontrol unit 1215. -
Control unit 1215 is only intended as a schematic representation of one or more control technologies that could be used withmotor tightening device 1125. For example, there are various approaches to motor control that may be employed to allow speed and direction control. For some embodiments, a microcontroller unit may be used. The microcontroller may use internal interrupt generated timing pulses to create pulse-width modulation (PWM) output. This PWM output is fed to an H-bridge which allows high current PWM pulses to drive the motor both clockwise and counterclockwise with speed control. However, any other methods of motor control known in the art could also be used. -
FIG. 5 is a schematic top view oftensioning system 1120 installed onfootwear 1110. As shown inFIG. 5 ,housing 1190 may be configured to be removably attached to a heel portion offootwear 1110. Further, tighteningdevice 1125,power source 1205, andcontrol unit 1215 may be housed withinhousing 1190, which may function to receive and protect these components. As shown inFIG. 5 , in some embodiments, whenhousing 1190 is attached to the heel portion offootwear 1110,motorized tensioning device 1125 may be disposed in a rearmost portion offootwear 1110. This positioning may facilitate the application of tension to tensile members on both amedial side 1260 and alateral side 1265 offootwear 1110. - In other embodiments, however, any of these components could be disposed in any other portions of an article, including the upper and/or sole structure. In some cases, some components could be disposed in one portion of an article and other components could be disposed in another, different, portion. In another embodiment motorized
tensioning device 1125 could be disposed at the heel of an upper, whilepower source 1205 and/orcontrol unit 1215 could be disposed with a sole structure offootwear 1110. For example, in one embodiment the power source and control unit may be disposed undermidfoot region 12 ofarticle 1110 with a cable connection (or a simple electrical contact connection) tomotorized tensioning device 1125, which may be disposed inheel region 14. In still other embodiments, a power source and a control unit could be integrated into a motorized tensioning device. For example, in some embodiments, both a battery and a control unit could be disposed within an outer housing ofmotorized tensioning device 1125. - Further, in some embodiments,
housing 1190 may be configured to wrap at least partially aroundmedial side 1260 andlateral side 1265 of the heel portion offootwear 1110, as also shown inFIG. 5 . InFIG. 5 ,control unit 1215 is shown onmedial side 1260 inheel region 14 offootwear 1110.Power source 1205 is shown onlateral side 1265 inheel region 14 offootwear 1110. The positions ofcontrol unit 1215 andpower source 1205 may be reversed in some embodiments. However, it may be advantageous to locate the thinner component on themedial side 1260 offootwear 1110. This may enablehousing 1190 to have a lower profile onmedial side 1260 than on lateral side 1265 (as shown inFIG. 5 ), which may minimize the amount ofhousing 1190 that extends medially and could interfere with the footwear on the other foot of the wearer. -
FIG. 6 is a partial view of lacingregion 1175 offootwear 1110 with the tensile member of the tensioning system installed. As shown inFIG. 6 , thirdtensile member portion 1135 is laced throughseventh eyelet 1187 andfourth eyelet 1184. In addition, fourthtensile member portion 1136 is laced throughthird eyelet 1183 andeighth eyelet 1188. As shown inFIG. 6 , the tensile member may include a manual release mechanism for manually decoupling thirdtensile member portion 1135 from a fourthtensile member portion 1136. For example, acoupling 1235 may includefirst connector portion 1240 at the distal end of thirdtensile member portion 1135, andsecond connector portion 1245 at the distal end of fourthtensile member portion 1135. As shown inFIG. 6 , in some embodiments, the manual release mechanism, such ascoupling 1235, may be located in an instep region offootwear 1110. -
Coupling 1235 may be a readily decoupled manually, in order to enable removal of the tensile member from the article of footwear. Such manual decoupling may facilitate removal of the motorized tensioning system fromfootwear 1110. This manual release mechanism may also enable the tension in the tensile member to be released in the event of a malfunction or low battery power. Exemplary manual release mechanisms may include any suitable connector types. In some embodiments, threaded connections may be utilized. For example,first connector portion 1240 may include a male threaded portion andsecond connector portion 1245 may include a female threaded portion. In order to decouplecoupling 1235,first connector portion 1240 andsecond connector portion 1245 may be twisted, for example in the directions of afirst arrow 1250 and asecond arrow 1255. WhileFIG. 6 illustrates a threaded coupling, in other embodiments the tensile member could utilized any other fastening provisions including a snap fit connector, a hook and receiver type connector, or any other kinds of manual fasteners known in the art. -
FIG. 7 illustrates an embodiment of an exemplary manual release system for tensile members. Referring toFIG. 7 ,article 1000 may be similar to previous embodiments and can include atensioning system 1002 with alace 1004 and amotorized tensioning device 1006. In this embodiment, a portion oflace 1004 is equipped with amanual release mechanism 1010. In the embodiment shown here,manual release mechanism 1010 includes correspondingfasteners 1012 that can be manually disconnected to relieve lace tension. In some cases,fasteners 1012 comprise a threaded coupling, as shown inFIG. 7 . However, other embodiments could utilized any other fastening provisions including a snap fit connector, a hook and receiver type connector, or any other kinds of fasteners known in the art. -
FIGS. 8 and9 illustrate an isometric view and isometric exploded view, respectively, of an embodiment of the internal components ofmotorized tensioning device 160. Referring first toFIG. 8 , the components are shown within a portion ofhousing unit 212.Housing unit 212 may further include aninner housing portion 216 and anouter housing portion 218.Outer housing portion 218 may include abase panel 210 as well as anouter cover 214, and generally provides a protective outer covering for components ofmotorized tensioning device 160.Inner housing portion 216 may be shaped to support components ofmotorized tensioning device 160. In some cases, portions ofinner housing portion 216 function to limit the mobility of some components, as discussed in detail below. - Referring now to
FIGS. 8 and9 , in some embodiments,motorized tensioning system 160 may comprise motor 220 (shown schematically inFIG. 9 ). In some embodiments,motor 220 may be an electric motor. However, in other embodiments,motor 220 could comprise any kind of non-electric motor known in the art. Examples of different motors that can be used include, but are not limited to: DC motors (such as permanent-magnet motors, brushed DC motors, brushless DC motors, switched reluctance motors, etc.), AC motors (such as motors with sliding rotors, synchronous electrical motors, asynchronous electrical motors, induction motors, etc.), universal motors, stepper motors, piezoelectric motors, as well as any other kinds of motors known in the art.Motor 220 may further include amotor crankshaft 222 that can be used to drive one or more components ofmotorized tensioning system 160. Provisions for poweringmotor 220, including various kinds of batteries, are discussed in detail below. - In some embodiments,
motorized tensioning system 160 can include provisions for reducing the output speed of, and increasing the torque generated by,motor 220. In some embodiments,motorized tensioning system 160 can include one or more gear reduction assemblies and/or gear reduction systems. In some embodiments,motorized tensioning system 160 may include a single gear reduction assembly. In other embodiments,motorized tensioning system 160 may include two or more gear reduction assemblies. In one embodiment,motorized tensioning system 160 includes firstgear reduction assembly 230 and secondgear reduction assembly 232, which may be collectively referred to asgear reduction system 228. Firstgear reduction assembly 230 may be an in-line spur gear reduction assembly that is generally aligned withmotor 220 and/orcrankshaft 222. In contrast, secondgear reduction assembly 232 may provide additional gear reduction that extends in a generally perpendicular direction to the orientation ofcrankshaft 222. With respect tohousing unit 212, firstgear reduction assembly 230 may extend in a longitudinal direction ofhousing unit 212 while secondgear reduction assembly 232 may extend in a lateral (or horizontal) direction ofhousing unit 212. By using a combination of in-line gears and horizontally spaced gears, relative to the orientation ofcrankshaft 222,motor 220 can be arranged in parallel with a spool and corresponding spool shaft (as discussed in further detail below). This arrangement may reduce the longitudinal space required to fit all the components ofmotorized tensioning device 160 withinhousing unit 212. - Each gear reduction assembly can comprise one or more gears. In the exemplary embodiment, first
gear reduction assembly 230 comprises one or more in-line spur gears. Moreover, firstgear reduction assembly 230 may be driven bycrankshaft 222 and itself drives afirst gear 234 of secondgear reduction assembly 232. - In one embodiment, second
gear reduction assembly 232 may be configured with 4 stages of spur gears, including afirst gear 234, asecond gear 235, athird gear 236 and afourth gear 237. In this embodiment,fourth gear 237 acts as a clamping gear for turning additional components ofmotorized tensioning device 160, as described in further detail below. The current embodiment of secondgear reduction assembly 232 includes four gears. However, other embodiments could use any other number of gears. Likewise, the number of gears comprising firstgear reduction assembly 230 may vary in different embodiments. Additionally, in different embodiments, the type of gears used in firstgear reduction assembly 230 and/orsecond gear assembly 232 could vary. In some cases, spur gears may be used. Other examples of gears that may be used include, but are not limited to: helical gears, external gears, internal gears, bevel gears, crown gears, worm gears, non-circular gears, rack and pinion gears, epicyclic gears, planetary gears, harmonic drive gears, cage gears, magnetic gears as well as any other kinds of gears and/or any combinations of various kinds of gears. The number, type and arrangement of gears forgear reduction system 228 may be selected to achieve the desired tradeoff between size, torque and speed of themotorized tensioning system 160. - In some embodiments,
motorized tensioning system 160 can include provisions for winding and unwinding portions of a lace. In some embodiments,motorized tensioning system 160 can includespool 240. In some cases,spool 240 may further comprise afirst receiving portion 242 and asecond receiving portion 244 for receiving a lace and a portion of a spring, respectively. Moreover, in some cases, first receivingportion 242 may comprise a firstlace winding region 246 and a secondlace winding region 248, which in some cases can be used to separately wind two ends of a lace. Since torque output goes down as the lace builds up in diameter, using separate winding regions for each lace end may help decrease the diameter of wound lace onspool 240 and thereby minimize torque output reduction. In some cases, firstlace winding region 246 and secondlace winding region 248 may be separated by a dividingportion 249, which may include alace receiving channel 247 for permanently retaining a portion of the lace onspool 240. In other cases, however, first receivingportion 242 may comprise a single lace winding region. -
Motorized lacing system 160 may include provisions for transferring torque between a final drive gear of secondgear reduction assembly 232 andspool 240. In some embodiments,motorized lacing system 160 may include provisions for transferring torque from second gear reduction assembly 232 (or more generally from gear reduction system 228) tospool 240 in a manner that allows for incremental tightening, incremental loosening and full loosening of a lace. In one embodiment,motorized lacing system 160 may be configured with atorque transmitting system 250 that facilitates the transmission of torque fromfourth gear 237 of secondgear reduction assembly 232 tospool 240. -
Torque transmitting system 250 may further comprise various assemblies and components. In some embodiments,torque transmitting system 250 may include a ratchetingassembly 252, ashaft 254 and arotation control assembly 256. As discussed in further detail below, the components oftorque transmitting system 250 operate to transmit torque fromfourth gear 237 of secondgear reduction assembly 232 tospool 240. More specifically, these components operate in a manner that allows for incremental tightening (spool winding), incremental loosening (spool unwinding) as well as full tension release (during which time substantially no torque is transferred fromfourth gear 237 to spool 240). - In some embodiments,
motorized tensioning device 160 may further include a secondary windingassembly 260. In some embodiments, secondary windingassembly 260 may be configured to apply torque to spool 240 independently of any torque applied bymotor 220. In some cases, for example, secondary windingassembly 260 comprises aspring member 262 and arotatable spring bearing 264.Spring member 262 may extends between second receivingportion 244 ofspool 240 andspring bearing 264. In particular, afirst end portion 263 ofspring member 262 may be associated withspool 240 while asecond end portion 265 ofspring member 262 may be associated withspring bearing 264. In operation,spring member 262 may be configured to apply a biasing torque that may tend to rotatespool 240 in the lace winding direction in the absence of other forces or torques (for example when there is slack in the lace).Spring member 262 could be a wind-up spring, a constant force spring, a constant torque spring, a clock spring as well as any other kind of spring. - Some embodiments can also include a fixed
bearing 266, which may be associated with an end ofshaft 254. In some embodiments, fixedbearing 266 may be received within arecess 268 ofinner housing portion 216. In some embodiments, an end ofshaft 254 may be disposed within opening 269 of fixedbearing 266, and may be configured so thatshaft 254 can slide throughopening 269 to provide some axial movement forshaft 254. - In some embodiments,
motorized tensioning device 160 may include provisions for adjusting the operation ofmotor 220 according to one or more feedback signals. In some embodiments, for example,motorized tensioning device 160 may include alimit switch assembly 258. Generally,limit switch assembly 258 may detect current across portions ofrotation control assembly 256 and vary the operation ofmotor 220 according to the detected current. Further details on the operation oflimit switch assembly 258 are discussed in detail below. - For purposes of reference, the following detailed description uses the terms "first rotational direction" and "second rotational direction" in describing the rotational directions of one or more components about an axis. For purposes of convenience, the first rotational direction and the second rotational direction refer to rotational directions about a longitudinal axis 284 (see
FIG. 12 ) ofshaft 254 and are generally opposite rotational directions. The first rotational direction may refer to the clockwise rotation of a component aboutlongitudinal axis 284, when viewing the component from the vantage point offirst end portion 620 ofshaft 254.First end portion 620 ofshaft 254 may be the end portion associated withfourth gear 237. The second rotational direction may be then be characterized by the counterclockwise rotation of a component aboutlongitudinal axis 284, when viewing the component from the same vantage point. - A brief overview of the operation of
motorized tensioning device 160 is described here. A detailed description of the operation is given below. In the incremental tightenmode motor 220 may begin operating in order to rotatecrankshaft 222.Crankshaft 222 may turn an input gear of firstgear reduction assembly 230, such that the output gear of firstgear reduction assembly 230 drivesfirst gear 234 of secondgear reduction assembly 232. The intermediatesecond gear 235 andthird gear 236 both rotate, which drivesfourth gear 237 in the first rotational direction. Asfourth gear 237 rotates,fourth gear 237 may engage and drivetorque transmitting system 250 such thatspool 240 may eventually begin to rotate in the first rotational direction. This causeslace 152 to wind onto first receivingportion 242 ofspool 240. - In the incremental loosen mode,
motor 220 may operate to rotatecrankshaft 222. In the loosening mode,motor 220 andcrankshaft 222 turn in an opposite direction of the direction associated with tightening. Thegear reduction system 228 is then driven such thatfourth gear 237 of secondgear reduction assembly 232 rotates in the second rotational direction. In contrast to the incremental tighten mode, in the incremental loosen modefourth gear 237 does not directly drive portions oftorque transmitting system 250 andspool 240. Instead, the motion offourth gear 237 in the second rotational direction causestorque transmitting system 250 to momentarily releasespool 240, allowingspool 240 to unwind by a predetermined amount after whichtorque transmitting system 250 reengagesspool 240 and prevents further unwinding. This sequence of releasing and catchingspool 240 occurs over and over as long asfourth gear 237 rotates in the second rotational direction. Further details of the method by which this incremental loosening is achieved is described in detail below. - Finally, in the open or fully loosen mode,
torque transmitting system 250 operates so that substantially no torque is transmitted to spool 240 from any components oftorque transmitting system 250. During this mode,spool 240 may rotate more easily in the unwinding direction about shaft 254 (for example, as a wearer manually loosenslace 152 to take off article 100). As slack forms along the lace, secondary windingassembly 260 may apply a small amount of torque tosecond receiving portion 244 ofspool 240, which acts to wind up slack inlace 152. -
FIGS. 10-14 illustrate various schematic views of the components comprisingtorque transmitting system 250. For purposes of clarity, these components are shown in isolation from other parts ofmotorized tightening device 160. Additionally, some components are not shown or may be shown in phantom in some views to reveal interior components. - Referring first to
FIGS. 10 and11 , ratchetingassembly 252 may comprise several components includingfourth gear 237,pawl member 600 and ratchet housing 602 (ratchethousing 602 is not shown inFIG. 11 to better show the relative positions offourth gear 237,pawl member 600 and spool 240).Fourth gear 237 may include anextended boss portion 604. In some embodiments, theextended boss portion 604 further includes africtional face 606 thatcontacts pawl member 600.Fourth gear 237 may also include an internally threadedcavity 608 that may engage threading onshaft 254. For purposes of convenience,fourth gear 237 is characterized as part of both ratchetingassembly 252 and secondgear reduction assembly 232 asfourth gear 237 acts as an element that confronts and directly drivespawl member 600 and also as a final driving gear of secondgear reduction assembly 232. In particular, it is to be understood that characterizingfourth gear 237 as part of one assembly does not preclude it from being associated with a different assembly. - In some embodiments,
pawl member 600 is configured to interface withratchet housing 602. In particular,teeth 610, which extend frompawl arms 611, may engage withcorresponding teeth 612 onratchet housing 602. In some cases the geometry ofpawl arms 611 andteeth 610 provide an arrangement wherepawl member 600 can rotate withinratchet housing 602 in a first rotational direction, butpawl member 600 is prevented from rotating withinratchet housing 602 in a second rotational direction that is opposite of the first rotational direction. - In some embodiments,
pawl member 600 includes aboss engaging surface 614 that confronts and can engagefrictional face 606 offourth gear 237. Whenfrictional face 606 offourth gear 237 is brought into contact withboss engaging surface 614 ofpawl member 600,fourth gear 237 may drivepawl member 600. Moreover, the one-way ratchet design of ratchetingassembly 252 ensures thatfourth gear 237 may only drivepawl member 600 in a first rotational direction. -
Pawl member 600 may include a spool engaging surface 616 (see alsoFIG. 16 ) which confronts afirst end 670 ofspool 240. Whenspool engaging surface 616 is pressed againstspool 240 with enough frictional force,pawl member 600 may be used to drivespool 240 in the first rotational direction. Thus, in the configuration shown inFIG. 11 , withfourth gear 237,pawl member 600 andspool 240 all clamped together under sufficient frictional force,fourth gear 237 may act to drivepawl member 600 and thusspool 240. - Ratcheting
assembly 252 is only intended to be exemplary of a one-way torque transmitting mechanism that may be used to transmit torque to a spool. Other embodiments are not limited to ratchet-like mechanisms and could include other one-way mechanisms. Examples of other one-way mechanisms that could be used include, but are not limited to: roller bearings, sprag clutches, ratcheting wheel and pawl as well as other mechanisms. -
FIGS. 12-14 illustrate various views of additional components oftorque transmitting system 250, includingshaft 254 androtation control assembly 256. In particular,FIG. 12 illustrates an isolated exploded view ofshaft 254 androtation control assembly 256, whileFIGS. 13-14 illustrate assembled views of some portions of these components from various perspectives. -
Shaft 254 may comprise afirst end portion 620. In some embodiments,first end portion 620 may include threading 624. In some cases, threading 624 may engage internally threaded cavity 608 (seeFIG. 10 ) offourth gear 237, which may facilitate the relative axial movement offourth gear 237 alongshaft 254.Shaft 254 may also include asecond end portion 622 that engages opening 269 of fixedbearing 266. In some embodiments, anintermediate portion 626 ofshaft 254 may be disposed betweenfirst end portion 620 andsecond end portion 622. - Various portions of
shaft 254 are configured to receive components oftorque transmitting system 250 andspool 240.First end portion 620 andsecond end portion 622 may be associated with ratchetingassembly 252 androtation control assembly 256, respectively.Intermediate portion 626 may be inserted within acentral cavity 690 of spool 240 (seeFIG. 15 ), such thatspool 240 may rotate aboutintermediate portion 262. - In some embodiments,
intermediate portion 626 ofshaft 254 further includes aflange portion 628 that extends radially outwards fromshaft 254.Flange portion 628 may include aspool engaging surface 630 that contacts spool 240. An opposing surface of flange portion 628 (not shown) may confrontrotation control assembly 256. In some embodiments,flange portion 628 may include one ormore slots 632. - In some embodiments,
rotation control assembly 256 may include anengagement plate 640 and acompression spring 642. In some embodiments,engagement plate 640 further includespins 644 that extend towardsengagement plate 640 andspool 240. In some embodiments, pins 644 may be inserted throughslots 632 offlange portion 628. Moreover, in some cases, pins 644 may be inserted intoalignment holes 650 of spool 240 (seeFIG. 15 ), which preventsshaft 254 andspool 240 from rotating independently of one another. - As seen in
FIGS. 12-14 , the components ofrotation control assembly 256 are disposed alongsecond end portion 622 ofshaft 254. In some embodiments,compression spring 642 may be disposed betweenengagement plate 640 and fixedbearing 266 so thatcompression spring 642 may act to biasengagement plate 640 in an axial direction towardsflange portion 628 andspool 240. - In other embodiments, alternate methods could be used for releasably coupling a shaft and spool. Examples include other kinds of physical interlocking features or including friction increasing features. As one example, axial compliant friction coupling could be achieved using a wave washer or Belleville washer.
-
FIG. 15 illustrates an isometric view of anembodiment spool 240 in isolation. As previously described,spool 240 includes provisions for receivingpins 644 ofengagement plate 640. In this case, fouralignment holes 650 are approximately evenly spaced about asecond end face 673. Additionally, this particular view ofspool 240 clearly illustrates aslot 675 that may be used for retaining an end ofspring member 262. - Referring now to
FIG. 16 , the components oftorque transmitting system 250 are shown in their assembled configuration alongshaft 254. For purposes of reference,spool 240 is shown in phantom onshaft 254. In addition, a cross-sectional portion ofinner housing portion 216 is shown for reference. As also seen inFIG. 8 , when installed withininner housing portion 216, some components oftorque transfer system 250 are constrained from any axial movement. For example,spool 240 and ratchethousing 602 are constrained from moving in an axial direction (or along a longitudinal direction of shaft 254). In contrast,fourth gear 237, which is threaded alongfirst end portion 620 ofshaft 254, can rotate aboutshaft 254 and translate axially (because of the threaded engagement) alongshaft 254. In some embodiments, awall portion 652 ofinner housing portion 216 limits the axial motion offourth gear 237 in a direction away from ratchetingassembly 252. - The arrangement shown here for
torque transmitting system 250 also allows for both rotation and axial translation ofshaft 254. In particular,second end portion 622 ofshaft 254 may slide through fixedbearing 266, whilefirst end portion 620 ofshaft 254 is disposed in achannel 660 of inner housing portion 216 (seeFIG. 8 ) that also allows for some axial motion ofshaft 254. In some embodiments, the amount of axial translation may be limited by features including contact betweenflange portion 628 andspool 240, as well as possibly other features. -
FIGS. 17 through 26 illustrate schematic views oftorque transmitting system 250 andspool 240 for purposes of illustrating the operation oftorque transmitting system 250 during incremental tightening, incremental loosening and full loosening. Referring first toFIG. 17 ,torque transmitting system 250 is in a configuration where the lace is fully loosened. More specifically, this configuration is one in which no torque is transmitted to spool 240 fromtorque transmitting system 250. In this configuration,fourth gear 237 may be spaced away from pawl member 600 (disposed within ratchet housing 602) so that no torque is transmitted fromfourth gear 237 topawl member 600. Furthermore, withoutfourth gear 237 to provide any clamping pressure againstpawl member 600 andspool 240,spool 240 may rotate without any substantial resistance atfirst end portion 670 frompawl member 600. Furthermore, in thisconfiguration engagement plate 640 andflange portion 628 are spaced apart fromsecond end 672 ofspool 640, so thatspool 240 also does not undergo any resistance to rotation atsecond end 672. Although features ofinner housing portion 612 prevent any axial motion ofspool 240, in thisconfiguration spool 240 may rotate in a first rotational direction or a second rotational direction. As previously described,spool 240 may be biased to rotate in a first rotational direction (i.e., lace winding direction) by secondary winding assembly 260 (not shown), which applies a biasing torque to spool at second receivingportion 244. However, this biasing force may be just large enough to pull in slack and can be overcome relatively easily by a wearer pulling on the laces to unwind them fromspool 240. Thus,spool 240 may rotate relatively freely in this configuration, thoughspool 240 will be biased to wind in slack in the absence of tension applied by the lace tospool 240. - As also shown in
FIG. 17 , in this fully loosened configuration thecontacts 259 oflimit switch assembly 258 are pressed againstengagement plate 640. This contact withengagement plate 640 provides continuity for the switch, so that current may flow betweencontacts 259. -
FIG. 18 shows the operation oftorque transmitting system 250 as motor 220 (not shown) begins to rotate. Initially,motor 220 drivesgear reduction system 228, so thatfourth gear 237 is rotated in the first rotational direction (represented schematically by arrow 700). Asfourth gear 237 rotates in the first rotational direction,fourth gear 237 translates axially (indicated by arrow 702) towardspawl member 600 because of the threaded interface betweenfourth gear 237 andshaft 254.Fourth gear 237 continues to rotate and translate axially untilfrictional face 606 ofboss portion 604 contacts and presses againstboss engaging surface 614 ofpawl member 600. At this point, the preload fromcompression spring 642 may provide some drag onengagement plate 640 and flange portion 628 (which are coupled) to keepshaft 254 from rotating whilefourth gear 237 translates axially alongshaft 254. Without this drag, or another source of friction or drag,shaft 254 may be inclined to turn withfourth gear 237 so thatfourth gear 237 would not translate axially. -
FIG. 19 shows the operation oftorque transmitting system 250 in a configuration wherespool 240 may begin to wind in lace (i.e.,torque transmitting system 250 is in the incremental tighten mode). In this case,motor 220 continues to drivefourth gear 237 in the first rotational direction (indicated schematically as arrow 700), though contact withpawl member 600 prevents any further axial translation offourth gear 237 alongshaft 254. Therefore, asfourth gear 237 continues to turn,shaft 254 is translated axially (indicated schematically as arrow 706) so thatfirst end portion 620 translates further fromspool 240. Asshaft 254 translates axially,flange portion 628 compresses againstsecond end 672 ofspool 240, allowingpins 644 to engage alignment holes (seeFIG. 15 ) ofspool 254. This locksshaft 254 andspool 240 together and prevents relative rotation of the two components. The contact betweenflange portion 628 andspool 240 prevents any further axial translation ofshaft 254. At this point, with ratchetingassembly 252 clamped againstfirst end portion 670 ofspool 240, further driving offourth gear 237 acts to rotatespool 240 in the first rotational direction (indicated schematically by arrow 708). As long asmotor 240 continues to drivefourth gear 237, lace may be wound ontospool 240. - It can also be seen in
FIG. 19 that asflange 628 moves towardsspool 240 andengagement plate 640 follows under the force ofcompression spring 642,limit switch assembly 258 is separated fromengagement plate 640. This breaks the continuity of current betweencontacts 259. -
FIGS. 20 and 21 illustrate close up schematic views of some components. For purposes of illustration, aschematic lace 720 is shown withspool 240. Referring toFIGS. 20 and 21 , ratchetingassembly 252 ensures that torque can only be transmitted fromfourth gear 237 topawl member 600 andspool 240, and not vice versa. In particular, the one-way operation of ratchetingassembly 252 prevents torque generated byspool 240 from turningpawl member 600,fourth gear 237 and ultimately motor 220. In other words, as previously described, ratchetingassembly 252 functions as a load-holding mechanism that preventsspool 240 from unintentionally rotating in the second rotational direction (i.e., the unwinding direction). This arrangement may help preventspool 240 from back windingmotor 220 in situations wheremotor 220 stops or the torque applied to spool 240 by the lace exceeds to torque applied to the spool byfourth gear 237. -
FIGS. 22-25 show the operation oftorque transmitting system 250 in an incremental loosen mode. In some embodiments, incremental loosening may occur in several stages. During a first stage, shown inFIGS. 22 and23 ,motor 220 is operated to drivefourth gear 237 in the second rotational direction (indicated schematically as arrow 730). This causesfourth gear 237 to translate axially away frompawl member 600 andspool 240 in a direction indicated schematically byarrow 732. Asfourth gear 237 translates away frompawl member 600, the clamping force betweenfourth gear 237,pawl member 600 andfirst end 670 ofspool 240 is released. During a second stage, shown inFIG. 24 , tension in the lace then causesspool 240 to rotate in the second rotational direction (indicated schematically by arrow 734). Becausespool 240 andshaft 254 are physically locked together at this stage,shaft 254 rotates along withspool 240 in the second rotational direction (indicated schematically by arrow 736). Asshaft 254 rotates the threaded engagement betweenshaft 254 and fourth gear 237 (as well as the resistance to the rotation offourth gear 237 provided bygear reduction system 228 and motor 220) causesfourth gear 237 to translate axially towardspawl member 600. In the last stage, shown inFIG. 25 ,fourth gear 237,pawl member 600 andspool 240 are clamped together, which preventsspool 240 from further rotation in the second rotational direction. These three stages may be repeated in succession to incrementally unwind lace fromspool 240. -
FIG. 26 shows the operation oftorque transmitting system 250 in a fully loosen mode (or full release mode). Referring toFIG. 26 ,motor 220 may drivefourth gear 237 to rotate in the second rotational direction (indicated schematically by arrow 740) until the lace tension is low enough thatspool 240 no longer unwinds. In some embodiments,fourth gear 237 may continue to rotate untilfourth gear 237 encounters a hard stop provided bywall portion 652 ofinner housing portion 216. Withfourth gear 237 unable to translate further, continued driving offourth gear 237 bymotor 220 results inshaft 254 translating axially in the direction indicated schematically byarrow 742 untilengagement plate 628 is no longer locked with spool 240 (i.e., untilpins 644 disengaged fromalignment holes 650 of spool 240). At this point,engagement plate 640 touchescontacts 259 oflimit switch assembly 258, thereby completing the limit switch continuity, which further causesmotor 220 to stop. This leavesspool 240 in a fully loosened state and able to rotate relatively freely, though with some biasing in the first rotational direction provided by secondary windingassembly 260. - A secondary winding assembly may be configured to operate substantially independently of a torque transmitting system. This may allow the winding assembly to draw in slack during various stages of operation of the torque transmitting system. In particular, the secondary winding assembly may be configured to draw in slack in a tensile member (e.g., lace), which could occur during tightening, loosening and fully loosening of the tensile member.
-
FIGS. 27 through 29 illustrate schematic isometric views of some portions ofmotorized tightening device 160. More specifically,FIGS. 27 through 29 are intended to illustrate the general operation of secondary windingassembly 260 during different operating modes of the system.FIG. 27 illustrates a configuration ofmotor tightening device 160 operating in a tightening mode. In this mode,fourth gear 237, in cooperation withtorque transmitting system 250, drivesspool 240 in a first rotational direction and thereby winds lace 800 aroundspool 240. In this mode,spring member 262 may be wound fromspool 240 tospring bearing 264 asspool 240 is driven by the motor. - Referring next to
FIG. 28 , when motorized tighteningdevice 160 operates in a fully loosened mode, the tension oflace 800 rotatesspool 240 in the second winding direction and unwindslace 800 fromspool 240. Asspool 240 winds in the second rotational direction,spring member 262 may unwind fromspring bearing 264 and onto second receivingportion 244 ofspool 240. This allowsspring member 262 to return to a default configuration, in which secondary windingassembly 260 tends to biasspool 240 in the winding direction to draw in slack. - Referring next to
FIG. 29 , motorized tighteningdevice 160 is operating in a mode where no torque is being supplied tospool 240 by a motor. In addition, slack has developed inlace 800 so thatlace 800 is not applying much torque to spool 240 either. In this situation, secondary windingassembly 260 provides a biasing force to windspool 240 in the first rotational direction, asspring member 262 unwinds from second receivingportion 244 ofspool 240 and ontospring bearing 264. - Secondary winding
assembly 260 may improve usability oftensioning system 150, by ensuring that slack is rapidly wound up whenmotor 220 is disengaged. This is desirable so a user can quickly put the article on or take the article off without having to wait for the motor to wind in slack. In the embodiment shown, this rapid slack winding is accomplished using constant force spring that is stored on a freewheeling spool and rewound onto one end of the lace spool. However, in other embodiments, a variety of different elements or systems could be used for this rapid slack winding. For example, in another embodiment a second small motor with either no reduction or light gear reduction could be used for slack winding. In still other embodiments, other spring elements could be used. For example, in another embodiment, an elastomeric torsion spring could be used. In still another embodiment, a geared clock spring could be used. Moreover, in other embodiments, a spring member could be wound onto other components of a tightening system. For example, in the alternative embodiment shown inFIG. 30 ,spring member 820 is configured to wind aroundspool 240 at one end, and aroundmotor 220 at another. This alternative arrangement may provide a slightly more compact configuration for a motorized tightening system. In addition to improving the speed of fully winding and unwinding the lace, battery life may be greatly improved over systems that utilize a motor to completely wind and unwind a lace. - The location of a motorized tensioning device can vary from one embodiment to another. The illustrated embodiments show a motorized tensioning device disposed on the heel of an upper. However, other embodiments may incorporate a motorized tensioning device in any other location of an article of footwear, including the forefoot and midfoot portions of an upper. In still other embodiments, a motorized tensioning device could be disposed in a sole structure of an article. The location of a motorized tensioning device may be selected according to various factors including, but not limited to: size constraints, manufacturing constraints, aesthetic preferences, optimal lacing placement, ease of removability as well as possibly other factors.
- In embodiments where
motorized tensioning device 160 is disposed externally on upper 102, a wearer may access components by removing a portion of housing unit 212 (seeFIG. 1 ). For example, in some cases spool 240 may be replaceable in the event of a broken lace. - Some embodiments may include provisions for incorporating a motorized tensioning device into removable components of an article. In one embodiment, a motorized tensioning device may be incorporated into an external heel counter. In some cases, an external heel counter may function as a harness for mounting a motorized tensioning device to an article. In such embodiments, the external heel counter may be specially adapted to receive a motorized tensioning device. An example of a heel counter configured for use with a lace tensioning device is disclosed in Gerber, U.S. Patent Application Publication No. _, (now
U.S. Patent Application Number 13/481,132, filed May 25, 2012 -
FIG. 31 illustrates a schematic isometric view of an embodiment of article offootwear 100 that is configured with atensioning system 150. In the current embodiment, article offootwear 100, also referred to hereafter simply asarticle 100, is shown in the form of an athletic shoe, such as a running shoe. However, in other embodiments,tensioning system 150 may be used with any other kind of footwear including, but not limited to: hiking boots, soccer shoes, football shoes, sneakers, running shoes, cross-training shoes, rugby shoes, basketball shoes, baseball shoes as well as other kinds of shoes. Moreover, in someembodiments article 100 may be configured for use with various kinds of non-sports related footwear, including, but not limited to: slippers, sandals, high heeled footwear, loafers as well as any other kinds of footwear. As discussed in further detail below, a tensioning system may not be limited to footwear and in other embodiments a tensioning system could be used with various kinds of apparel, including clothing, sportswear, sporting equipment and other kinds of apparel. In still other embodiments, a tensioning system may be used with braces, such as medical braces. -
Article 100 may include upper 102 andsole structure 104. Generally, upper 102 may be any type of upper. In particular, upper 102 may have any design, shape, size and/or color. For example, in embodiments wherearticle 100 is a basketball shoe, upper 102 could be a high top upper that is shaped to provide high support on an ankle. In embodiments wherearticle 100 is a running shoe, upper 102 could be a low top upper. - In some embodiments,
sole structure 104 may be configured to provide traction forarticle 100. In addition to providing traction,sole structure 104 may attenuate ground reaction forces when compressed between the foot and the ground during walking, running or other ambulatory activities. The configuration ofsole structure 104 may vary significantly in different embodiments to include a variety of conventional or non-conventional structures. In some cases, the configuration ofsole structure 104 can be configured according to one or more types of ground surfaces on whichsole structure 104 may be used. Examples of ground surfaces include, but are not limited to: natural turf, synthetic turf, dirt, as well as other surfaces. - In different embodiments,
sole structure 104 may include different components. For example,sole structure 104 may include an outsole, a midsole, and/or an insole. In addition, in some cases,sole structure 104 can include one or more cleat members or traction elements that are configured to increase traction with a ground surface. - In some embodiments,
sole structure 104 may be joined with upper 102. In some cases, upper 102 is configured to wrap around a foot and securesole structure 104 to the foot. In some cases, upper 102 may include opening 130 that provides access to an interior cavity ofarticle 100. -
Tensioning system 150 may comprise various components and systems for adjusting the size ofopening 130 and thereby tightening (or loosening) upper 102 around a wearer's foot. In some embodiments,tensioning system 150 may compriselace 152 as well asmotorized tensioning device 160.Lace 152 may be configured to pass through various different lacing guides 154, which may be further associated with the edges ofthroat opening 132. In some cases, lacing guides 154 may provide a similar function to traditional eyelets on uppers. In particular, aslace 152 is pulled or tensioned, throat opening 132 may generally constrict so that upper 102 is tightened around a foot. - The arrangement of lacing guides 154 in this embodiment is only intended to be exemplary and it will be understood that other embodiments are not limited to a particular configuration for lacing guides 154. Furthermore, the particular types of lacing guides 154 illustrated in the embodiments are also exemplary and other embodiments may incorporate any other kinds of lacing guides or similar lacing provisions. In some other embodiments, for example,
lace 154 could be inserted through traditional eyelets. Some examples of lace guiding provisions that may be incorporated into the embodiments are disclosed inCotterman et al., U.S. Patent Application Publication Number 2012/0000091, published January 5, 2012 and entitled "Lace Guide". Additional examples are disclosed inGoodman et al., U.S. Patent Application Publication Number 2011/0266384, published November 3, 2011 and entitled "Reel Based Lacing System" (the "Reel Based Lacing Application"). Still additional examples of lace guides are disclosed inKerns et al., U.S. Patent Application Publication Number 2011/0225843, published September 22, 2011 and entitled "Guides For Lacing Systems". -
Lace 152 may comprise any type of type of lacing material known in the art. Examples of lace that may be used include cables or fibers having a low modulus of elasticity as well as a high tensile strength. A lace may comprise a single strand of material, or can comprise multiple strands of material. An exemplary material for the lace is SPECTRA™, manufactured by Honeywell of Morris Township NJ, although other kinds of extended chain, high modulus polyethylene fiber materials can also be used as a lace. Still further exemplary properties of a lace can be found in the Reel Based Lacing Application mentioned above. - In some embodiments,
lace 152 may be passed through lacing guides 154 and may pass through internal channels (not shown) within upper 102 after enteringchannel openings 156 that are above lacing guides 154. In some embodiments, the internal channels extend around the sides of upper 102 and guide the lace towardsmotorized tensioning device 160, which may be mounted onheel portion 14 of upper 102. In some cases,motorized tensioning device 160 may include provisions for receiving portions oflace 152. In some cases, end portions oflace 152 exit internal channels of upper 102 and pass through apertures in ahousing unit 212 ofmotorized tensioning device 160. -
Motorized tensioning device 160 may be configured to automatically apply tension to lace 152 for purposes of tightening and loosening upper 102. As described in further detail below,motorized tensioning device 160 may include provisions for windinglace 152 onto, and unwindinglace 152 from, a spool internal tomotorized tensioning device 160. Moreover, the provisions may include an electric motor that automatically winds and unwinds the spool in response to various inputs or controls. - Provisions for mounting
motorized tensioning device 160 to upper 102 can vary in different embodiments. In some cases,motorized tensioning device 160 may be removably attached, so thatmotorized tensioning system 160 can be easily removed by a user and modified (for example, when a lace must be changed). Examples of provisions for removably attachingmotorized tensioning system 160 to upper 102 are discussed in detail later. In other cases,motorized lacing device 160 could be permanently attached to upper 102. In one embodiment, for example, an external harness (not shown) may be used to mountmotorized tensioning system 160 to upper 102 atheel portion 14. - In some embodiments,
motorized tensioning device 160 may communicate withremote device 170. In some cases,motorized tensioning device 160 may receive operating instructions fromremote device 170. For example,motorized tensioning device 160 may receive instructions to apply increased tension to lace 152 by winding the spool. In some cases,remote device 170 may be capable of receiving information frommotorized tensioning device 160. For example,remote device 170 could receive information related to the current tension inlace 152 and/or other sensed information. As discussed below in reference toFIG. 32 ,remote device 170 may function as a remote control that may be used by the wearer to operatetensioning system 150. - In one embodiment,
remote device 170 comprises a mobile phone, such as the iPhone made by Apple, Inc. In other embodiments, any other kinds of mobile phones could also be used including smartphones. In other embodiments, any portable electronic devices could be used including, but not limited to: personal digital assistants, digital music players, tablet computers, laptop computers, ultrabook computers as well as any other kinds of portable electronic devices. In still other embodiments, any other kinds of remote devices could be used including remote devices specifically designed for controllingmotorized tensioning device 160. in another embodiment, discussed in detail below,remote device 170 could comprise a bracelet, wristband and/or armband that is worn by a user and specifically designed for communicating withmotorized tensioning device 160. The type of remote device could be selected according to software and hardware requirements, ease of mobility, manufacturing expenses, as well as possibly other factors. - In some embodiments,
motorized tightening device 160 may communicate with multiple remote devices. For example, a user may use a mobile device, such as an iPhone, at home to identify and set preferred tension settings, and another remote device, such as with a bracelet, wristband and/or armband, with more rudimentary controls might then be used to issue commands tomotorized tightening device 160, for example while playing sports. For example, a bracelet might allow a user to recall a set tension and adjust it, but not set a new tension for later recall. - As already mentioned,
remote device 170 may communicate with motorized tightening device 160 (or indirectly withmotorized tightening device 160 via a secondary device, such as a separate control unit). Examples of different communication methods include, but are not limited to: wireless networks such as personal area networks (e.g., Bluetooth®) and local area networks (e.g., Wi-Fi) as well as any kinds of RF based methods known in the art. In some embodiments, infrared light may be used for wireless communication. Although the illustrated embodiments detail aremote device 170 that communicates wirelessly withmotorized tensioning system 160, in other embodimentsremote device 170 andmotorized tensioning system 160 may be physically connected and communicate through one or more wires. - For purposes of clarity, a single article of footwear is shown in the embodiments. However, it will be understood that
remote device 170 may be configured to operate a corresponding article of footwear which also includes a similar tensioning system (e.g., a pair of footwear each having a tensioning system). As described below,remote device 170 may be used to operate each the tensioning systems of each article independently of one another. -
FIG. 32 illustrates a schematic view of an embodiment ofremote device 170, including a schematic representation of an exemplary user interface for controllingtensioning system 150. In some embodiments,remote device 170 may be capable of running a lacingcontrol software application 180, hereafter referred to simply asapplication 180. In embodiments whereremote device 170 is a mobile phone (or similar digital device) capable of running mobile software applications,application 180 may be downloaded by a user from a third party online store or website. Such a mobile phone (or similar digital device) may include a touch screen LCD device which may be used byapplication 180 for input and output interaction with a user. In some embodiments, an LCD or non-touch screen LCD may be used for output display only. -
Application 180 may display, and respond to user interaction with, a plurality ofcontrol buttons 182 and initiate control commands in response to such interaction. Exemplary control commands may include, but are not limited to, left/right shoe selection, incremental tighten, incremental loosen, open/fully loosen, store tension, and recall/restore tension. In the exemplary embodiment ofFIG. 32 , these control buttons include afirst button 191 and asecond button 192, which are respectively used to select the shoe (left or right) that will receive and respond to the control commands. In some embodiments, eitherfirst button 191 orsecond button 192 may be selected, but both may not be selected simultaneously. In other cases, it may be possible to select bothfirst button 191 andsecond button 192 simultaneously, to allow a user to tighten, loosen, or open both shoes simultaneously. In addition,application 180 may includethird button 193 for initiating an "incremental tighten" command, afourth button 194 for initiating an "incremental loosen" command and afifth button 195 for initiating an "open" (or fully loosen) command. Optionally, some embodiments could include a "fully tighten" command that would tighten the footwear until a predetermined threshold is achieved (for example, a threshold pressure, winding distance, etc.). - In some embodiments, a shoe, article, or other item may include more than one
motorized tightening device 160. In such embodiments, eachmotorized tightening device 160 may include wireless communication hardware for separately communicating with aremote device 170, or a single wireless communication device may be provided for common use by multiplemotorized tightening devices 160. For such embodiments,remote device 170 may be configured, such as withapplication 180, to provide additional buttons or other controls to individually adjust pluralmotorized tightening devices 160 on a single article. For example,button 191 illustrated inFIG. 32 could be subdivided into a top region and lower region which are separately responsive to user interaction. By use of these regions, one of twomotorized tightening devices 160 could be selected for tension adjustment viabuttons buttons application 180, allowing for more rapid adjustment of multiplemotorized tightening devices 160. -
Application 180 may also include provisions for storing and using preferred tension settings. For example,sixth button 196 andseventh button 197 may be used to initiate a "store current tension" command and a "return to stored tension" command, respectively. In some cases, the tension values could be stored at the remote device, while in other cases the tension values could be stored in internal memory of a control board for themotorized tensioning device 160. Still other embodiments could include provisions for storing multiple tension settings. For example, a user may prefer a tighter fit for playing sports and a looser fit for casual activities. In such cases,remote device 170 may allow a user to store two or more tension settings, corresponding to at least two different lace tension preferences. In some embodiments,sixth button 196 may cause the tension setting for a single, currently selected, motorized tighteningdevice 160 to be stored, and in some embodimentssixth button 196 may cause the tension settings for multiplemotorized tightening devices 160 to be stored in a single action. Those skilled in the art appreciate that storage or recall of tensions for multiplemotorized tightening devices 160, whether part of a single item or multiple items, such as a pair of shoes, may be performed with a single command issued by aremote device 170 or with a series of control commands, such as by issuing separate control commands to eachmotorized tightening device 160. - In some embodiments,
application 180 and/orremote device 170 may be configured to selectively control individual items or individual sets of items, such as a pair of shoes, from among multiple items or sets of items within communication range ofremote device 170. For example,application 180 may be configured to enumerate items by unique identifiers assigned to each item, display the enumerated items to a user, and receive an input selecting an item. In another example, anapplication 180 may be paired via Bluetooth® with a particular item or set of items. In another example, a remote device without an LCD display may include a control button that may be pressed, repeatedly if needed, to select a desired item, and the item may include an LED which is illuminated when it is in wireless communication with the remote device. - The embodiments are not limited to a particular user interface or application for remotely operating
motorized tensioning device 160. The embodiments here are intended to be exemplary, and other embodiments could incorporate any additional control buttons, interface designs and software applications. As one example, some embodiments may not include provisions for selecting the shoe to be controlled, and instead could utilize two sets of control buttons, where each set corresponds to either the left or right shoe. The control buttons for initiating various operating commands can be selected according to various factors including: ease of use, aesthetic preferences of the designer, software design costs, operating properties of themotorized tensioning device 160 as well as possibly other factors. - Throughout the detailed description and in the claims, various operating modes, or configurations, of a tensioning system are described. These operating modes may refer to states of the tensioning system itself, as well as to the operating modes of individual subsystems and/or components of the tensioning system. Exemplary modes include an "incremental tighten mode", an "incremental loosen mode" and a "fully loosen" mode. The latter two modes may also be referred to as an "incremental release mode" and a "full release mode". In the incremental tighten mode, motorized tightening
device 160 may operate in a manner that incrementally (or gradually) tightens, or increases the tension of,lace 152. In the incremental loosen mode, motorized tighteningdevice 160 may operate in a manner that incrementally (or gradually) loosens, or releases tension in,lace 152. As discussed further below, the incremental tighten mode and the incremental loosen mode may tighten and loosen a lace in discrete steps or continuously. In the full release mode, motorized tighteningdevice 160 may operate in a manner so that tension applied to the lace by the system is substantially reduced to a level where the user can easily remove his or her foot from the article. This is in contrast to the incremental release mode, where the system operates to achieve a lower tension for the lace relative to the current tension, but not necessarily to completely remove tension from the laces. Moreover, while the full release mode may be utilized to quickly release lace tension so the user can remove the article, the incremental release mode may be utilized to make minor adjustments to the lace tension as a user searches for the desired amount of tension. Although the embodiments describe three possible modes of operation (and associated control commands), other operating modes may also be possible. For example, some embodiments could incorporated a fully tighten operating mode wheremotorized tightening device 160 continues to tightenlace 152 until a predetermined tension has been achieved. -
FIGS. 33 through 37 illustrate schematic views of an embodiment ofarticle 100 being tightened and loosened during different operating modes oftensioning system 150. Each figure also shows a schematic view ofremote device 170, including the particular control button used to initiate each operating mode. -
FIG. 33 showsarticle 100 is in a fully opened state just prior to the entry offoot 200. In this state,lace 152 may be loose enough to allow a user to insert his or her foot intoopening 130. Referring next toFIG. 34 ,foot 200 is inserted intoarticle 100, which remains in the fully opened state. Referring next toFIG. 35 , an incremental tighten command has been sent tomotorized tensioning device 160 by pressingthird button 193 ofremote device 170. This command causesmotorized tensioning device 160 to enter an incremental tighten mode. At this point, the tension oflace 152 is increased to tighten upper 102 aroundfoot 200. In particular,lace 152 is drawn intomotorized tensioning device 160, which pulls on the portions oflace 152 disposedadjacent throat opening 132 and thus constrictsthroat opening 132. In some cases, this incremental tightening can occur in discrete steps so that each time the wearer pressesthird button 193,lace 152 is taken up by a predetermined amount (for example by rotating a spool withinmotorized tensioning device 160 through a predetermined angle). In other cases, this incremental tightening can occur in a continuous manner, as long as the wearer continues to touchthird button 193. In some cases, the speed of tightening can be set so that the system does not overshoot a preferred level of tightness (i.e., the system doesn't move between not tight enough and overly tight too quickly) while also being large enough to avoid overly long times for fully tighteningarticle 100. -
FIGS. 36 and37 illustrate schematic views of two different operating modes wherelace 152 may be loosened. Referring first toFIG. 36 , a wearer can pressfourth button 194 to initiate an incremental loosen command intensioning system 150. Upon receiving the incremental loosen command,motorized tensioning device 160 may operate in an incremental loosen mode, in which lace 152 is released from motorized tensioning device 160 (i.e., sections oflace 152 exit from motorized tensioning device 160). This relaxes some of the tension inlace 152 and allows throat opening 132 to partially expand. In some cases, this incremental loosening can occur in discrete steps so that each time the wearer pressesfourth button 194,lace 152 is let out up by a predetermined amount (for example by rotating a spool withinmotorized tensioning device 160 through a predetermined angle). In other cases, this incremental loosening can occur in a continuous manner, as long as the wearer continues to touchfourth button 194. In some cases, the speed of loosening can be set so that the system does not overshoot a preferred level of tightness (i.e., the system doesn't move between too tight and not tight enough too quickly) while also being large enough to avoid overly long times for fully looseningarticle 100. With this arrangement, a wearer can continue increasing and decreasing the tension of lace 152 (using the incremental tighten and incremental loosen modes) until a preferred level of tightness for upper 102 is achieved. - Referring next to
FIG. 37 , a wearer can pressfifth button 195 to initiate an open, or fully loosen, command intensioning system 150. In contrast to the incremental loosen command, the open command may be used to quickly relieve all (or most of) tension inlace 152 so that a user can quickly removearticle 100. Thus, upon receiving the open command,motorized tensioning device 160 operates in a fully loosen mode. In this mode, motorized tensioning device operates to let out enough oflace 152 so that substantially all tension is removed fromlace 152. In some cases, this may be achieved by continuously monitoring tension in lace 152 (for example, using sensors) and letting outlace 152 until the level of tension is below a threshold tension. In other cases, this may be achieved by letting out a predetermined length oflace 152 known to correspond approximately to the amount needed to achieve a fully loosened state for tensioningsystem 150. As seen inFIG. 37 , withtensioning system 150 in the open state, foot 200 can be easily and comfortably removed fromfootwear 100. - In different embodiments, control of a motorized lacing device can be accomplished using various methods and devices. Referring now to
FIG. 38 , some embodiments may utilize various kinds of remote devices, including an RF basedcontrol bracelet 390.Control bracelet 390 may incorporate one or more buttons for sending commands to a motorized tensioning device. In some cases,control bracelet 390 may include buttons for initiating incremental tightening and incremental loosening commands. In still other cases, additional buttons can be included for initiating any other commands including the open command (or fully loosen command), store tension command and return to stored tension command. Still other cases could incorporate any other buttons for issuing any other kinds of commands. - In some other embodiments, buttons for tightening, loosening and/or performing other functions can be located directly on an article. As an example, some embodiments could incorporate one or more buttons located on or adjacent to the housing of a motorized tensioning device. In still other embodiments, a motorized tightening device maybe controlled using voice commands. These commands could be transmitted through a remote device, or to a device capable of receiving voice commands that is integrated into the article and in communication with the motorized tensioning device.
- Embodiments can incorporate a variety of sensors for providing information to a control unit of a motorized tensioning system. As described above, in some embodiments an H-bridge mechanism is used to measure current. The measured current is provided as an input to control unit 302 (see
FIG. 5 ). In some cases, a predetermined current may be known to correspond to a certain lace tension. By checking the measured current against the predetermined current, a motorized tensioning system may adjust the tension of a lace until the predetermined current is measured, which indicates the desired lace tension has been achieved. - With current as a feedback, a variety of digital control strategies can be used. For instance, proportional control only could be used. Alternatively, PI control could be used or full PID. In cases some cases, simple averaging could be used or other filtering techniques including fuzzy logic and band-pass to reduce noise.
- Still other embodiments can include additional types of sensors. In some cases, pressure sensors could be used under the insoles of an article to indicate when the user is standing. A motorized tensioning system can be programmed to automatically loosen the tension of the lace when the user moves from the standing position to a sitting position. Such a configuration may be useful for older adults that may require low tension when sitting to promote blood circulation but high tension for safety when standing.
- Still other embodiments could include additional tension sensing elements. In one embodiment, three point bend indicators could be used in the lace to more accurately monitor the state of the tensioning system, including the lace. In other embodiments, various devices to measure deflection such as capacitive or inductive devices could be used. In some other embodiments, strain gauges could be used to measure tension induced strain in one or more components of a tensioning system.
- In some embodiments, sensors such as gyroscopes and accelerometers could be incorporated into a tensioning system. In some embodiments, an accelerometer and/or gyroscope could be used to detect sudden moment and/or position information that may be used as feedback for adjusting lace tension. These sensors could also be implemented to control periods of sleep/awake to extend battery life. In some cases, for example, information from these sensors could be used to reduce tension in a system when the user is inactive, and increase tension during periods of greater activity.
- Some embodiments may use memory (for example onboard memory associated with a control unit) to store sensed data over time. This data may be stored for later upload and analysis. For example, one embodiment of an article of footwear may sense and store tension information over time that can be later evaluated to look at trends in tightening.
- It is also contemplated that some embodiments could incorporate pressure sensors to detect high pressure regions that may develop during tightening. In some cases, the tension of the lace could be automatically reduced to avoid such high pressure regions. Additionally, in some cases, a system could prompt a user to alter them to these high pressure regions and suggest ways of avoiding them (by altering use or fit of the article).
- It is contemplated that in some embodiments a user could be provided with feedback through motor pulsing, which generates haptic feedback for the user in the form of vibrations/sounds. Such provisions could facilitate operation of a tensioning system directly, or provide haptic feedback for other systems in communication with a motorized tensioning device.
- Various methods of automatically operating a motorized tensioning device in response to various inputs can be used. For example, after initially tightening a shoe, it is common for the lace tension to quickly decline in the first few minutes of use. Some embodiments of a tensioning system may include provisions for readjusting lace tension to the initial tension set by the user. In some embodiments, a control unit may be configured to monitor tension in those first minutes to then readjust tension to match original tension.
-
FIG. 39 is a schematic view of an exemplary process for automatically readjusting lace tension to maintain the user desired tension over time. In some embodiments, some of the following steps could be accomplished by a control unit 302 (seeFIG. 5 ) associated withmotorized tensioning device 160. In other embodiments, some of the following steps could be accomplished by other components of a tensioning system. It will be understood that in other embodiments one or more of the following steps may be optional. - In
step 502, control unit 302 may determine if a user has finished tightening an article. In some cases, control unit 302 may determine that a user has finished tightening a lace if no control commands (e.g., an incremental tighten command) have been received after a predetermined period of time. If control unit 302 determines that the user has finished tightening the article, control unit 302 proceeds to step 504. Otherwise, control unit 302 may wait until it has been determined that the user has finished tightening the article. - In
step 504, control unit 302 may monitor tension of the tensioning system (e.g., tension of a lace) for a predetermined interval to determine an initial tension. Methods for monitoring tension, including current sensors and other sensors have been previously discussed above. In some cases, control unit 302 may set the average measured tension over the predetermined interval as the initial tension. - Next, in
step 506, control unit 302 may determine if the tension of the tensioning system has decreased. If not, control unit 302 may wait and then revaluate if the tension has decreased. Once it has been determined that the tension has decreased, control unit 302 may proceed to step 508. Instep 508, control unit 302 may automatically increase the tension of the tensioning system until the initial tension has been achieved. In some embodiments, afterstep 508, control unit may wait and again automatically evaluate the tension atstep 506. In some embodiments, control unit 302 may be additionally configured to automatically detect overtension and in response automatically decrease the tension of the tensioning system until the initial tension has been achieved. In some embodiments, control unit 302 may be configured to perform cyclic changes in tension, such as to enhance blood circulation. - In some embodiments, instead of only waiting a determined period of time, as illustrated in
FIG. 39 and described above, the revaluation ofstep 506 may be triggered by sensor information. In one example, sensor-based triggering may replace the waiting, with sensor information causing reevaluation of tension to occur. In another example, waiting may be performed as illustrated inFIG. 39 , but with sensor information possibly causing the waiting to be terminated and triggering reevaluation of tension. Sensors providing such information to control unit 302 might include, but are not limited to, pressure sensors in shoe insoles to detect standing and/or rate of motion, bend indicators, strain gauges, gyroscopes, and accelerometers. In some embodiments, instead of or in addition to maintaining an initial tension, the sensor information may be used to establish a new target tension. For example, pressure sensors could be used to measure contact pressures of the upper of an article of footwear against the foot of a wearer and automatically adjust to achieve a desired pressure. In some embodiments, control unit 302 may be configured to store sensor information obtained over a period of time to identify triggering events. Additionally, control unit 302 may be configured to upload or otherwise provide stored sensor information to a remote device. Uploaded sensor information may be reviewed and analyzed for purposes including, but not limited to, monitoring correlations between footwear tightness and athletic performance. - Some embodiments may be configured to operate in two or more different modes. For example, some embodiments could operate in a "normal mode" and a "game mode" (or similarly, a "sports mode" or "active mode"). In the normal mode, the electric motor would be powered down after tensioning in order to save battery life. In contrast, when the game mode is selected by a user, the tension of the system may be continuously monitored and adjusted for maximum performance though at the expense of battery life. By enabling a user to change between these two modes, a user can choose to optimize battery life or optimize performance depending on the needs of the situation. In some embodiments, multiple target tensions may be stored and returned to, for either of the "normal mode" or the "game mode," such as configuring a target tension for sport and a substantially different tension for leisure. In some embodiments, control unit 302 may be configured to frequently, but not continuously, monitor and adjust tension, so as to further extend battery life while achieving some of the benefit of a continuously monitored "game mode."
-
FIG. 40 is a schematic view of an exemplary process for operating a tensioning system in two different modes. In some embodiments, some of the following steps could be accomplished by a control unit 302 (seeFIG. 5 ) associated withmotorized tensioning device 160. In other embodiments, some of the following steps could be accomplished by other components of a tensioning system. It will be understood that in other embodiments one or more of the following steps may be optional. - In
step 510, control unit 302 may receive the user selected mode. This may be determined by receiving a signal from a remote device, which may prompt a user to select with a "normal mode" or a "game mode". Next, instep 512, control unit 302 may determine if the user has finished tightening the article. If not, control unit 302 waits until the user has finished tightening the article. When the user has finished tightening the article, control unit 302 proceeds to step 514. Atstep 514, control unit 302 determines which mode has been selected from the information received duringstep 510. If the user has selected the normal mode, control unit proceeds to step 516, where the motor is powered down and the system awaits further instructions from the user (or other systems/sensors) to save battery power. If, however, the user has selected the game mode atstep 514, control unit 302 proceeds to step 518. Duringstep 518, control unit 302 may actively monitor the tension of the article and may automatically adjust the tension to achieve maximum performance. - As another example of a process for automatically controlling a tensioning system, GPS feedback from a remote device could be used to determine if a runner is on flat ground, climbing or descending. The system could automatically adjust the tension of the laces in footwear automatically, for example, by increasing tension in the laces during descent.
- Methods of digitally tracking tensioning data measured by one or more sensors could be used in some embodiments. The average tension of the device could also be tracked. This tension data may be used to measure performance parameters, such as loading on the foot during an athletic activity. In some embodiments, such tension monitoring may be used to measure swelling. In addition, in some cases, the number of times the footwear is put on and taken off can be tracked. In addition, time of use could also be tracked. Data collection could be facilitated by various technologies including USB devices, data cords and blue tooth communication technologies. Moreover, the data collected can be transmitted through a variety of technologies to either a central database for evaluation.
- Although the exemplary methods described above and shown in
FIGS. 39 and40 are directed to footwear, it will be understood that similar methods could be used for automated operation of other kinds of articles including tensioning systems. In particular, these methods could be used with any type of apparel. -
FIG. 41 shows a schematic view of an alternative embodiment of amotorized tensioning device 900. For purposes of describing some internal components,FIG. 43 illustrates a cross sectional view of some components ofmotorized tensioning device 900.Motorized tensioning device 900 may include some similar provisions as the previous embodiments, for example amotor 902 and agear reduction system 904 that is driven bymotor 902.Gear reduction system 904 as shown here includes 5 stages of spur gears. Other gear reductions that could be employed include: cycloidal, harmonic, and planetary. In some embodiments, themotor 902 andgear reduction system 904 combination may be sized to maximize the tradeoffs between current requirement, size, torque and speed. In the embodiment shown, the gear reduction is approximately 600:1 with an output RPM of 30 and a peak current of 1.2 amps. - The output of
gear reduction system 904 may enter an incrementally releasableload holding mechanism 906, which is shown inFIG. 42 . Thisload holding mechanism 906 comprises a ratcheting type mechanism, which helps hold any loads applied tospool 908 without potentially back drivingmotor 902 and/orgear reduction system 904. The purpose is to hold the load without relying on the motor/gearbox to not back drive.Load holding mechanism 906 may hold load onspool 908 even whilemotor 902 is de-energized. When a small amount of lace tension is desired to be released,motor 902 unwinds and a sweeper element sweepspawl elements 910 offinternal teeth 912 allowing the output to unwind one tooth. This can be repeated as desired to precisely unwind the spool and correspondingly relax lace tension. This is important to allow the user to get to a precise fit. An exemplary load holding mechanism that may be used is disclosed inSoderberg et al., U.S. Patent Application Publication Number 2010/0139057, published June 10, 2010 and titled "Reel Based Lacing System". - Referring to
FIGS. 41 and43 , the output ofload holding mechanism 906 in this embodiment is a malesquare drive 914. This drive element could be any number of sides or be an external spline. The male square drive mates with afemale element 916 with sufficient clearance and of a material for low friction sliding along shaft 912 (seeFIG. 43 ). Thefemale element 916 is driven by the malesquare drive 914. The opposite end offemale element 916 includes aface driving element 920. In the embodiment shown, this is a large number of triangular teeth which can engage or disengage from matching teeth on one flange ofspool 908. These teeth could be from as few as one to more than eight. To encourage engagement the teeth may be back drafted from 5 to 60 degrees. In some embodiments, the teeth may be angled at approximately 45 degrees. - The center of
female element 916 has a thread (not shown) which can engage threaded portion ofshaft 912. Whenmotor 902 is driven in onedirection element 916 moves axially as a result of the internal thread and engages the face teeth between itself and corresponding teeth onspool 908.Shaft 912, which is normally stationary, has africtional element 922 to prevent rotation during axial travel and engagement. When engagement is complete and the face teeth are fully engaged, the external thread ofshaft 912 will experience torque. Over a certain torque level,motor 902 andgear reduction system 904 will overcome thetorsional friction element 922 andshaft 912 will turn. In the embodiment shown,frictional element 922 is an O-ring onshaft 912 that is contained in a housing. The O-ring pressure can be adjusted via a screw which can clamp down on the O-ring. In other embodiments, this torsion friction could be accomplished by a number of means. For example, in another embodiment, torsional friction could be done as a coulomb frictional device such as an adjustable face clutch for instance using steel or brass against nylon or other brake pad materials and adjustable via an axial spring tensioner. In other embodiments, torsional friction could also be done electrically via a particle clutch or hydraulically via a rotary damper. In some embodiments, the number of turns to reach disengagement can be coordinated if desired with the number of turns to go from full lace tension to no tension. That way, incremental release can be done anywhere in the range of lace that is tensioned. - In the embodiment shown, rapid slack wind may be achieved via a constant force spring (not shown) that is stored on a
freewheeling spool 930 and rewound onto oneend 930 ofspool 908. - In some embodiments, the lace may exit and is tended through radiused eyelets in a housing to prevent lace wear and increase lace fatigue life. In some embodiments, these exits may be located at least ½ of the spool diameter away from the spool to help the lace more or less level wind onto the spool to maximize capacity.
- In some embodiments, a user initiated manual release element is also provided should the user every find themselves in tightened shoes with no remaining battery life. Many approaches could be used to manually disengage the spool from the load holding and motor/gearbox mechanism. For instance a tapered blade (not shown) can be inserted between the teeth on
spool 908 andelement 916 to separate them via a spring element allowing axial movement ofspool 908 in the separation direction. -
FIGS. 44 and45 illustrate schematic views of an alternative tensioning and release mechanism that could be used with a motorized tightening system. For purposes of reference, this mechanism is shown in isolation from other components of a tightening device. This mechanism can be used for accomplishing tightening, load holding, incremental release and full release. - In this design, a system of cams and latches are used. Referring to
FIGS. 44 and45 ,load holding mechanism 938 includes a finalstage output gear 940 of a gear reduction system (not shown) which is connected to acylindrical plate 942 that has asingle driving pawl 944 near its center. In the tightening direction, the motor is continually driven and thepawl 944 drives via detents in anoutput ring 946 that is attached to the spool. Thisoutput ring 946 hasinternal detents 948 thatplate 942 drives and externalfemale teeth 950 that engage an externalload holding pawl 954. When the motor is stopped the externalload holding pawl 954 resists the spool torque. It can be seen thatplate 942 not only has theinternal drive pawl 944 but also hascam elements 945 on its periphery that periodically disengage the externalload holding pawl 954. When stopped and holding load the external pawl is engaged 954. Then thecylindrical plate 942 begins to back up for an incremental release. At first the output does not release. Then one ofcam elements 945 onplate 942 releases outsideload holding pawl 954. When this happens,output ring 946 catches up topawl 954 and next theload holding pawl 954 engages and the mechanism stops in an incremental load holding position. In this way incremental release is accomplished. For this to operate a limit switch is employed to monitorplate 942 and stop in each incremental release position. In the embodiment shown there are six stop positions or every 60 degrees of rotation. This number can vary based on space requirements and the incremental lace release resolution desired. There could be as few as 1 stop per revolution and as many as 12, for example. - For full release,
mechanism 938 must be stopped with both the internal and external pawl released at the same time. There is one more releasingpawl 960 required to accomplish this. In the figure,pawl 960 has three positions. Fully retracted, actuator extended, and releasing cam extended. After tensioning,pawl 960 is fully retracted. As incremental releases are actuated, theinternal pawl 944 will likely pass thisexternal pawl 960 and set it to the full release position. So when a full release is commanded, theinternal pawl 944 will move into a position where both internal and external pawls are lifted and the user can freely extract lace and take off the article while only encountering minimal resistance which is provided by the slack take up mechanism. -
FIG. 46 illustrates an exemplary embodiment of an article offootwear 3010 including an upper 3155 and asole structure 3150 secured to upper 3155. In some embodiments,sole structure 3150 may include amidsole 3151 and aninsole 3054.Insole 3054 may be removably inserted intofootwear 3010, as illustrated by anarrow 3055. -
FIG. 46 also shows amotorized tensioning system 3020, which may be removably attached tofootwear 3010.Footwear 3010 andtensioning system 3020 may have the same or similar attributes as footwear and tensioning systems discussed above. For example, tensioning system may include a tightening device, power source, and other componentry in ahousing 3025, which may be removably attached to upper 3155, for example, on a heel portion offootwear 3010. - In addition,
footwear 3010 may include various additional components disposed insole structure 3150. For example, in some embodiments,footwear 3010 may include acushioning element 3080 in a heel portion ofsole structure 3150. Cushioningelement 3080 may be incorporated intomidsole 3151. In some embodiments,cushioning element 3080 may include a chamber containing a pressurized fluid. In some embodiments,cushioning element 3080 may include a foam cushioning material. - In some embodiments,
footwear 3010 may include aremovable electronics device 3065 in the heel portion ofsole structure 3150.Electronics device 3065 may be removably inserted into arecess 3060 inmidsole 3151 beneathinsole 3054, as indicated by anarrow 3070.Electronics device 3065 may include adata acquisition component 3075 configured to collect performance data. In some embodiments,footwear 3010 may include bothcushioning element 3080 andelectronics device 3065. For example, as shown inFIG. 46 ,cushioning element 3080 may be located in the heel region ofmidsole 3151 andelectronics device 3060 may be located in the midfoot region ofmidsole 3151. - Because the forefoot region of
midsole 3151 may have a height that is relatively minimal, the placement ofcushioning element 3080 andelectronics package 3060 inmidsole 3151 may leave little room for additional componentry insole structure 3150. Accordingly, the attachability ofhousing 3025 oftensioning system 3020 to an outer heel portion of upper 3155 may enable use of motorized tightening in footwear that includes componentry incorporated intomidsole 3151. - In some embodiments, the motorized tensioning system may incorporate a different arrangement of components. For example, as shown in
FIG. 47 , amotorized tensioning system 4125 may be removably attachable to an article offootwear 4010. The components and operation oftensioning system 4125 may be similar to other tensioning systems discussed above. For example,tensioning system 4125 may include ahousing 4126 that is removably attachable to a heel portion offootwear 4010. In addition,housing 4126 may house amotorized tightening device 4200, apower source 4205 and acontrol unit 4210. However, in some embodiments, as shown inFIG. 47 ,tightening device 4200 may be disposed on a medial or lateral side offootwear 4010 when tensioningsystem 4125 is installed onfootwear 4010. In addition, in some embodiments, as shown inFIG. 47 ,power source 4205 may be disposed in a rear-most portion of the heel portion offootwear 4010 when tensioningsystem 4125 is installed onfootwear 4010. This arrangement may be advantageous in some cases, for example, when tighteningdevice 4200 has a lower profile thanpower source 4205. It may be desirable to maintain a minimal width oftensioning system 4125, and thus, it may be preferred to house a larger sized battery on the rear-most portion of the heel portion. - This arrangement may also be advantageous to operate alternative lacing arrangements. For example, as shown in
FIG. 48 , in some embodiments, an article offootwear 5010 may include alacing region 5175 that is located on a medial or lateral side offootwear 5010. Such a lacing arrangement may provide improved fit, and may enable snug tightening without placing undue pressure on various portions of the foot, such as the instep region. In addition, locatinglacing region 5175 away from the instep region may enable a relatively smooth surface offootwear 5010 to be presented in the instep region. This smooth surface may be desirable for soccer, to improve kicking accuracy and prevent impact of uneven materials with the foot. - A
motorized tensioning system 5125 may be removably attachable tofootwear 5010, and may include similar components to the tensioning systems discussed above. For example,tensioning system 5125 may include a motorized tightening device, a power source, and a control unit housed within ahousing 5126.Tensioning system 5125 may also include a tensile member. The tensile member may include multiple portions connectible with manual couplings, such asconnector 5035. For example, the tensile member may include a firsttensile member portion 5130 associated withhousing 5126. In addition, the tensile member may include a secondtensile member portion 5135 and a thirdtensile member portion 5136, which may be laced through lacingregion 5175. Because both ends of firsttensile member portion 5130 may enterhousing 5126 on the same side offootwear 5010, it may be desirable to locate the tightening device on the side offootwear 5010 nearest the entry point of firsttensile member portion 5130. - Motorized tensioning systems that are heel-mounted may enable other lacing configurations to be used. For example, because the lace tension in a heel-mounted tensioning system is being applied from the heel region, and because the tensioning is automated, the lacing region need not be exposed. Accordingly, concealed lacing systems may be used. For example, in some embodiments, a lacing system is envisaged in which the lacing region is underfoot in the sole structure of the shoe.
-
FIG. 49 shows an article offootwear 6010.Footwear 6010 may include asole structure 6150 and an upper 6155 secured tosole structure 6150. In addition,FIG. 49 shows amotorized tensioning system 6125.Tensioning system 6125 may be removably attachable tofootwear 6010, and may include similar components to the tensioning systems discussed above. For example,tensioning system 6125 may include a motorized tightening device, a power source, and a control unit housed within ahousing 6126.Tensioning system 6125 may also include a tensile member. The tensile member may include multiple portions connectible with manual couplings. For example, the tensile member may include a firsttensile member portion 6130 associated withhousing 6126. In addition, the tensile member may include a secondtensile member portion 6136 which may be laced into alacing region 6175. Secondtensile member portion 6136 may be removably attached to firsttensile member portion 6130 bymanual couplings 6140. Accordingly,housing 6126 and its contents, as well as first tensile member portion may be replaced due to the removability ofhousing 6126 from upper 6155 andmanual couplings 6140. - As shown in
FIG. 49 , lacingregion 6175 may be located internally, for example, in afootbed 6005 ofsole structure 6150. Secondtensile member portion 6136 may entersole structure 6150 proximate a firstperipheral edge 6025 and a secondperipheral edge 6030 offootbed 6005. Further, secondtensile member portion 6136 may be disposed in agroove 6020 infootbed 6005. Secondtensile member portion 6136 may extend between anchor members that are located proximate firstperipheral edge 6025 and secondperipheral edge 6030 offootbed 6005. For example, afirst anchor member 6011, asecond anchor member 6012, and athird anchor member 6013 may be located proximate firstperipheral edge 6025. In addition, afourth anchor member 6014, afifth anchor member 6015, and athird anchor member 6016 may be located proximate secondperipheral edge 6030. These anchor members may be secured to upper 6155. When tensioningsystem 6125 applies tension to the tensile member, secondtensile member portion 6136 may draw the anchor members closer to one another, thus tightening upper 6155 around the foot. Additional details of exemplary footbed lacing systems are provided in Baker et al.,U.S. Patent No. 8,387,282, issued March 5, 2013 , and entitled "Cable Tightening System for an Article of Footwear".
Claims (15)
- An article of footwear (1110) including a motorized tensioning system (1121), comprising:a tensile member;a motorized tightening device (1125) configured to apply tension in the tensile member to adjust the size of an internal void (1165) defined by the article of footwear (1110); anda power source (1205) configured to supply power to the motorized tightening device (1125);wherein the tensile member, the motorized tightening device (1125), and the power source (1205) are configured to be removably attached to the article of footwear (1110);the tensile member including a first tensile member portion (1130) associated with and extending through the motorized tightening device (1125), and a second tensile member portion (1135) configured to be releasably attached to the first tensile member portion (1130).
- The article of footwear of claim 1, wherein the motorized tensioning system (1121) further includes a control unit (1215) and a housing (1190) configured to house the first tensile member portion (1130), the motorized tightening device (1125), the power source (1205) and the control unit (1215), and wherein the housing (1190) is configured to be removably attached to the article of footwear (1110).
- The article of footwear of claim 2, wherein the housing (1190) is configured to be removably attached to a heel portion (14) of the article of footwear (1110).
- The article of footwear of claim 3, wherein, when the housing (1190) is attached to the heel portion (14) of the article of footwear (1110), the motorized tightening device (1125) is disposed in a rearmost portion of the article of footwear (1110).
- The article of footwear of claim 3, wherein the housing (1190) is configured to wrap at least partially around a medial side (1260) and a lateral side (1265) of the heel portion (14) of the article of footwear (1110); and/or
wherein, when the housing (1190) is attached to the heel portion of the article of footwear (1110), the motorized tightening device (1125) is disposed in the medial (1260) side or lateral (1265) side of the heel portion (14) of the article of footwear (1110). - The article of footwear of claim 1, wherein the tensile member includes a manual release mechanism (1010) for manually decoupling a first portion of the tensile member (1130) from a second portion of the tensile member (1135), thereby enabling removal of the tensile member from the article of footwear (1110).
- The article of footwear of claim 6, wherein, when the tensile member is laced into the article of footwear (1110), the manual release mechanism (1010) is disposed in an instep region of the article of footwear (1110).
- The article of footwear of claim 1, wherein the tensile member is configured to be laced into the article of footwear (1110) in a lacing region (5175) in an instep region of the article of footwear (1110) and/or wherein the second tensile member portion is laced into the article of footwear in a sole structure of the article of footwear.
- The article of footwear of claim 1, wherein the motorized tightening device (1125) is configured to be controlled using a remote device (1145).
- The article of footwear of claim 1, further including at least one of a cushioning element (3080) and an electronics device (3065) in a heel region (14) of a sole structure of the article of footwear (1110).
- The article of footwear of claim 1, wherein the article of footwear includes a cushioning element (3080) in a heel region (14) of a sole structure of the article of footwear (1110) and an electronics device in a midfoot region of the sole structure of the article of footwear (1110).
- A method of changing a lacing system of an article of footwear (1110) according to claim 1, comprising;
providing an article of footwear (1110) including a motorized tensioning system (1121) attached to the article of footwear, the motorized tensioning system (1121) including a tensile member laced through eye stays in a lacing region (5175) of the article of footwear (1110), a motorized tightening device (1125) configured to apply tension in the tensile member to adjust the size of an internal void defined by the article of footwear (1110), and a power source (1205) configured to supply power to the motorized tightening device (1125);
removing tensile member, the motorized tightening device (1125), and the power source (1205) from the article of footwear (1110); and
lacing a manual lace (1115) into the article of footwear (1110);
wherein removing the tensile member from the article of footwear (1110) includes disconnecting a manual release mechanism (1010) of the tensile member (1130) to disconnect a first portion of the tensile member (1130), which is associated with and extending through the motorized tightening device (1125), from a second portion of the tensile member (1135). - The method of claim 12, wherein lacing a manual lace (1115) into the article of footwear (1110) includes lacing the manual lace (1115) into the eye stays from which the tensile member was removed; and/or
wherein removing the motorized tightening device (1125) includes detaching a housing (1190) containing the motorized tightening device (1125) from an upper of the article of footwear (1110). - A motorized footwear lacing system for an article of footwear according to claim 1, comprising:an article of footwear (1110);a manual lace (1115);a motorized tensioning system (1121), including a tensile member and a motorized tightening device (1125) configured to apply tension in the tensile member to adjust the size of an internal void defined by the article of footwear (1110); anda container configured to contain the article of footwear (1110), the manual lace, the tensile member (1130), and the motorized tightening device (1125); wherein the tensile member and the motorized tightening device (1125) are configured to be removably attached to the article of footwear (1110) and replaced with the manual lace (1115); andwherein the tensile member includes a manual release mechanism (1010) for manually decoupling a first portion of the tensile member (1130), which is associated with and extending through the motorized tightening device (1125), from a second portion of the tensile member (1135), thereby enabling removal of the tensile member from the article of footwear (1110).
- The system of claim 14, further including a remote device (1145) configured to control the motorized tightening device (1125).
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22211509.9A EP4212052A1 (en) | 2013-09-20 | 2014-09-18 | Footwear having motorized adjustment system |
| EP19175382.1A EP3593662B1 (en) | 2013-09-20 | 2014-09-18 | Motorized adjustment system for an article of footwear |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/032,524 US9693605B2 (en) | 2012-08-31 | 2013-09-20 | Footwear having removable motorized adjustment system |
| PCT/US2014/056207 WO2015042216A1 (en) | 2013-09-20 | 2014-09-18 | Footwear having removable motorized adjustment system |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19175382.1A Division EP3593662B1 (en) | 2013-09-20 | 2014-09-18 | Motorized adjustment system for an article of footwear |
| EP22211509.9A Division EP4212052A1 (en) | 2013-09-20 | 2014-09-18 | Footwear having motorized adjustment system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3046434A1 EP3046434A1 (en) | 2016-07-27 |
| EP3046434B1 true EP3046434B1 (en) | 2019-05-22 |
Family
ID=51842751
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19175382.1A Active EP3593662B1 (en) | 2013-09-20 | 2014-09-18 | Motorized adjustment system for an article of footwear |
| EP14790802.4A Active EP3046434B1 (en) | 2013-09-20 | 2014-09-18 | Footwear having a removable motorized adjustment system |
| EP22211509.9A Pending EP4212052A1 (en) | 2013-09-20 | 2014-09-18 | Footwear having motorized adjustment system |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19175382.1A Active EP3593662B1 (en) | 2013-09-20 | 2014-09-18 | Motorized adjustment system for an article of footwear |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP22211509.9A Pending EP4212052A1 (en) | 2013-09-20 | 2014-09-18 | Footwear having motorized adjustment system |
Country Status (4)
| Country | Link |
|---|---|
| EP (3) | EP3593662B1 (en) |
| JP (1) | JP6581989B2 (en) |
| CN (2) | CN105722419B (en) |
| WO (1) | WO2015042216A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11044968B2 (en) | 2012-08-31 | 2021-06-29 | Nike, Inc. | Footwear having removable motorized adjustment system |
Families Citing this family (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11723436B2 (en) | 2008-05-02 | 2023-08-15 | Nike, Inc. | Article of footwear and charging system |
| US8046937B2 (en) | 2008-05-02 | 2011-11-01 | Nike, Inc. | Automatic lacing system |
| US11684111B2 (en) | 2012-02-22 | 2023-06-27 | Nike, Inc. | Motorized shoe with gesture control |
| US11071344B2 (en) | 2012-02-22 | 2021-07-27 | Nike, Inc. | Motorized shoe with gesture control |
| US9609904B2 (en) | 2015-04-23 | 2017-04-04 | Adidas Ag | Shoes for ball sports |
| US11103030B2 (en) | 2015-10-07 | 2021-08-31 | Puma SE | Article of footwear having an automatic lacing system |
| US11185130B2 (en) | 2015-10-07 | 2021-11-30 | Puma SE | Article of footwear having an automatic lacing system |
| US11033079B2 (en) | 2015-10-07 | 2021-06-15 | Puma SE | Article of footwear having an automatic lacing system |
| WO2018095501A1 (en) * | 2016-11-22 | 2018-05-31 | Puma SE | Method for fastening a shoe, in particular a sports shoe, and shoe, in particular sports shoe |
| EP3884800A1 (en) | 2015-11-30 | 2021-09-29 | Nike Innovate C.V. | Article of footwear and charging system |
| ES2762861T3 (en) | 2015-12-02 | 2020-05-26 | Puma SE | Procedure for tying a shoe, especially a sneaker |
| KR101708462B1 (en) * | 2015-12-28 | 2017-02-20 | 박성훈 | Shoes for sensing of walking and system using the same |
| KR102378234B1 (en) | 2016-03-15 | 2022-03-25 | 나이키 이노베이트 씨.브이. | Homing Mechanism for Automated Footwear Platforms |
| US9861164B2 (en) * | 2016-03-15 | 2018-01-09 | Nike, Inc. | Tensioning system and reel member for an article of footwear |
| KR102494900B1 (en) | 2016-03-15 | 2023-02-01 | 나이키 이노베이트 씨.브이. | Capacitive Foot Presence Detection for Footwear |
| WO2017160966A1 (en) * | 2016-03-15 | 2017-09-21 | Mizuno Usa, Inc. | Footwear having an adjustable heel mechanism |
| US9961963B2 (en) | 2016-03-15 | 2018-05-08 | Nike, Inc. | Lacing engine for automated footwear platform |
| US10201212B2 (en) * | 2016-03-15 | 2019-02-12 | Nike, Inc. | Article of footwear with a tensioning system including a guide assembly |
| US11064768B2 (en) | 2016-03-15 | 2021-07-20 | Nike, Inc. | Foot presence signal processing using velocity |
| US10827804B2 (en) * | 2016-03-15 | 2020-11-10 | Nike, Inc. | Lacing apparatus for automated footwear platform |
| US11357290B2 (en) | 2016-03-15 | 2022-06-14 | Nike, Inc. | Active footwear sensor calibration |
| WO2017160927A2 (en) | 2016-03-15 | 2017-09-21 | Nike Innovate C.V. | Motor control for automated footwear platform |
| US10390589B2 (en) | 2016-03-15 | 2019-08-27 | Nike, Inc. | Drive mechanism for automated footwear platform |
| US20190133242A1 (en) * | 2016-05-19 | 2019-05-09 | Shenzhen Royole Technologies Co. Ltd. | Shoe and method for controlling the shoe |
| US11026472B2 (en) * | 2016-07-22 | 2021-06-08 | Nike, Inc. | Dynamic lacing system |
| DE102016010382A1 (en) * | 2016-08-30 | 2018-03-01 | Parvayim Anstalt | Device for Schnürzugbetätigung |
| CN113876075B (en) | 2016-10-26 | 2024-07-26 | 耐克创新有限合伙公司 | Upper component for an article of footwear |
| KR102220090B1 (en) | 2016-10-26 | 2021-02-26 | 나이키 이노베이트 씨.브이. | Lacing architecture for automated footwear platform |
| CN110087499A (en) | 2016-11-22 | 2019-08-02 | 彪马欧洲股份公司 | The method that clothes is through with wearer or takes off or closes, put on, open from wearer or remove the luggage that people carries |
| WO2018105504A1 (en) * | 2016-12-09 | 2018-06-14 | 並木精密宝石株式会社 | Winding device |
| KR101836011B1 (en) | 2016-12-30 | 2018-03-07 | 원광대학교산학협력단 | Shoes with Charging Function |
| US10694857B2 (en) | 2017-04-10 | 2020-06-30 | Nike, Inc. | Sport chair with game integration |
| EP3609587B1 (en) | 2017-04-12 | 2023-08-02 | Nike Innovate C.V. | Wearable article with removable module |
| CN110730937B (en) * | 2017-04-12 | 2024-05-24 | 耐克创新有限合伙公司 | Wearable article with detachable module |
| WO2019040021A2 (en) * | 2017-04-13 | 2019-02-28 | Tasan Umit | Shoelace apparatus |
| FR3066679B1 (en) * | 2017-05-29 | 2020-01-24 | Zhor Tech | SELF-LACING SHOE |
| CN115553600A (en) * | 2017-05-31 | 2023-01-03 | 耐克创新有限合伙公司 | Sports seat of integrated match |
| US11707115B2 (en) | 2017-05-31 | 2023-07-25 | Nike, Inc. | Automated footwear lacing systems, devices, and techniques |
| CN107019283A (en) * | 2017-06-02 | 2017-08-08 | 成都小晓学教育咨询有限公司 | A kind of climbing boot intelligence system of use sensing technology |
| US10172409B1 (en) * | 2018-05-31 | 2019-01-08 | Nike, Inc. | Intelligent electronic footwear and control logic for automated pedestrian collision avoidance |
| IT201800008121A1 (en) * | 2018-08-20 | 2020-02-20 | Eng Team Srl | SPORTS SHOES WITH OPENING AND CLOSING SYSTEM MANAGED BY ELECTRONIC DEVICES |
| DE202019005973U1 (en) * | 2018-09-06 | 2023-09-26 | Nike Innovate C.V. | Dynamic lacing system with feedback mechanism |
| USD889805S1 (en) | 2019-01-30 | 2020-07-14 | Puma SE | Shoe |
| USD906657S1 (en) | 2019-01-30 | 2021-01-05 | Puma SE | Shoe tensioning device |
| USD899053S1 (en) | 2019-01-30 | 2020-10-20 | Puma SE | Shoe |
| JP2022534848A (en) * | 2019-04-23 | 2022-08-04 | プーマ エス イー | Article of footwear having an automatic lacing system |
| US11484089B2 (en) | 2019-10-21 | 2022-11-01 | Puma SE | Article of footwear having an automatic lacing system with integrated sound damping |
| KR102346004B1 (en) * | 2020-06-01 | 2021-12-31 | 삼덕통상 주식회사 | An automated fastening system for shoe upper |
| CN113942891B (en) * | 2020-07-17 | 2024-04-26 | 苏州星诺奇科技股份有限公司 | Manufacturing method of rope belt tightening assembly and manufacturing method of wearable product |
| US12121366B2 (en) * | 2021-02-12 | 2024-10-22 | The Board Of Trustees Of The University Of Alabama | Sensorized shoelace-tensioning system and method |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5157813A (en) * | 1991-10-31 | 1992-10-27 | William Carroll | Shoelace tensioning device |
| JP2005124597A (en) * | 2003-10-21 | 2005-05-19 | Satoki Sakabayashi | Shoelace tightening device |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4644938A (en) * | 1985-01-22 | 1987-02-24 | Danninger Medical Technology | Hand exerciser |
| DE9016325U1 (en) * | 1990-11-30 | 1991-06-20 | PUMA AG Rudolf Dassler Sport, 8522 Herzogenaurach | Shoe with a central closure |
| DE4302401A1 (en) * | 1993-01-28 | 1994-08-04 | Egolf Heinz | Rotary fastening for two closure elements |
| US6289558B1 (en) * | 1997-08-22 | 2001-09-18 | Boa Technology, Inc. | Footwear lacing system |
| US7591050B2 (en) * | 1997-08-22 | 2009-09-22 | Boa Technology, Inc. | Footwear lacing system |
| DE29817003U1 (en) * | 1998-09-22 | 1999-03-25 | Merlaku, Kastriot, 84347 Pfarrkirchen | High-tech shoe closure system |
| TW521593U (en) * | 2002-02-08 | 2003-02-21 | Kuen-Jung Liou | Shoes capable of being tightened electrically |
| US6983553B2 (en) * | 2002-05-13 | 2006-01-10 | Adidas International Marketing B.V. | Shoe with tunable cushioning system |
| JP3682967B2 (en) * | 2003-01-20 | 2005-08-17 | 劉 坤 鐘 | Easy to wear shoes |
| FR2854773B1 (en) * | 2003-05-13 | 2005-12-09 | Salomon Sa | CLASP |
| DE102005036013A1 (en) * | 2005-08-01 | 2007-02-08 | Eberhard Friebe | Shoe laces fastening and loosening system, comprises magnetic elements acting on mechanism located in heel |
| FR2924577B1 (en) * | 2007-12-07 | 2010-03-12 | Ct Tech Cuir Chaussure Maroqui | FOAMING ARTICLE WITH EASY CLAMP |
| US8046937B2 (en) * | 2008-05-02 | 2011-11-01 | Nike, Inc. | Automatic lacing system |
| KR101688997B1 (en) | 2008-11-21 | 2016-12-22 | 보아 테크놀러지, 인크. | Reel based lacing system |
| CN102821635B (en) | 2010-01-21 | 2015-10-14 | 博技术有限公司 | For the guiding device of strapping system |
| US8387282B2 (en) | 2010-04-26 | 2013-03-05 | Nike, Inc. | Cable tightening system for an article of footwear |
| KR20210079413A (en) | 2010-04-30 | 2021-06-29 | 보아 테크놀러지, 인크. | Reel based lacing system |
| US8474146B2 (en) * | 2010-06-22 | 2013-07-02 | Nike, Inc. | Article of footwear with color change portion and method of changing color |
| WO2012003399A2 (en) | 2010-07-01 | 2012-01-05 | Boa Technology, Inc. | Lace guide |
| EP4327688A3 (en) * | 2012-08-31 | 2024-05-01 | Nike Innovate C.V. | Motorized tensioning system with sensors |
| EP3871548B1 (en) * | 2012-08-31 | 2024-04-03 | NIKE Innovate C.V. | Motorized tensioning system |
-
2014
- 2014-09-18 CN CN201480062685.0A patent/CN105722419B/en active Active
- 2014-09-18 EP EP19175382.1A patent/EP3593662B1/en active Active
- 2014-09-18 WO PCT/US2014/056207 patent/WO2015042216A1/en active Application Filing
- 2014-09-18 EP EP14790802.4A patent/EP3046434B1/en active Active
- 2014-09-18 EP EP22211509.9A patent/EP4212052A1/en active Pending
- 2014-09-18 JP JP2016543980A patent/JP6581989B2/en active Active
- 2014-09-18 CN CN201810450695.1A patent/CN108652118B/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5157813A (en) * | 1991-10-31 | 1992-10-27 | William Carroll | Shoelace tensioning device |
| JP2005124597A (en) * | 2003-10-21 | 2005-05-19 | Satoki Sakabayashi | Shoelace tightening device |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11044968B2 (en) | 2012-08-31 | 2021-06-29 | Nike, Inc. | Footwear having removable motorized adjustment system |
| US11166525B2 (en) | 2012-08-31 | 2021-11-09 | Nike, Inc. | Footwear having removable motorized adjustment system |
| US11191322B2 (en) | 2012-08-31 | 2021-12-07 | Nike, Inc. | Motorized tensioning system with sensors |
| US11786013B2 (en) | 2012-08-31 | 2023-10-17 | Nike, Inc. | Motorized tensioning system with sensors |
| US11998086B2 (en) | 2012-08-31 | 2024-06-04 | Nike, Inc. | Motorized tensioning system with sensors |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6581989B2 (en) | 2019-09-25 |
| CN105722419B (en) | 2018-06-05 |
| EP3046434A1 (en) | 2016-07-27 |
| EP4212052A1 (en) | 2023-07-19 |
| CN108652118A (en) | 2018-10-16 |
| JP2016530058A (en) | 2016-09-29 |
| WO2015042216A1 (en) | 2015-03-26 |
| EP3593662A1 (en) | 2020-01-15 |
| EP3593662B1 (en) | 2022-12-07 |
| CN105722419A (en) | 2016-06-29 |
| CN108652118B (en) | 2022-09-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11044968B2 (en) | Footwear having removable motorized adjustment system | |
| EP3046434B1 (en) | Footwear having a removable motorized adjustment system | |
| US10413020B2 (en) | Motorized tensioning system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20160324 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAX | Request for extension of the european patent (deleted) | ||
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20180411 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20181127 |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: BEERS, TIFFANY A. |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602014047315 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1134999 Country of ref document: AT Kind code of ref document: T Effective date: 20190615 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20190522 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190822 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190922 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190822 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190823 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1134999 Country of ref document: AT Kind code of ref document: T Effective date: 20190522 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602014047315 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 |
|
| 26N | No opposition filed |
Effective date: 20200225 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190918 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190918 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20190930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190922 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140918 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190522 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230515 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240702 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20240701 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240702 Year of fee payment: 11 |