EP2740645B1 - Système de mécanisation de la commande manuelle d'organe de commande de véhicule ferroviaire - Google Patents
Système de mécanisation de la commande manuelle d'organe de commande de véhicule ferroviaire Download PDFInfo
- Publication number
- EP2740645B1 EP2740645B1 EP13195817.5A EP13195817A EP2740645B1 EP 2740645 B1 EP2740645 B1 EP 2740645B1 EP 13195817 A EP13195817 A EP 13195817A EP 2740645 B1 EP2740645 B1 EP 2740645B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- actuating device
- control member
- rail vehicle
- fact
- detachable connection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 27
- 238000005259 measurement Methods 0.000 claims description 4
- 238000013519 translation Methods 0.000 claims description 4
- 230000005611 electricity Effects 0.000 claims description 3
- 238000000034 method Methods 0.000 claims description 3
- 230000001131 transforming effect Effects 0.000 claims description 3
- 206010003830 Automatism Diseases 0.000 claims 6
- 238000004146 energy storage Methods 0.000 description 9
- 238000009826 distribution Methods 0.000 description 4
- 238000009434 installation Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 210000000056 organ Anatomy 0.000 description 3
- 230000005489 elastic deformation Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 238000003892 spreading Methods 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61D—BODY DETAILS OR KINDS OF RAILWAY VEHICLES
- B61D7/00—Hopper cars
- B61D7/14—Adaptations of hopper elements to railways
- B61D7/16—Closure elements for discharge openings
- B61D7/24—Opening or closing means
- B61D7/28—Opening or closing means hydraulic or pneumatic
Definitions
- the present invention relates to the field of railway vehicles and more particularly to that of the control of the operation of a mechanical equipment of a rail vehicle, in particular a railway vehicle for the transport of goods or maintenance of railways.
- ballast boats which are railcars used to transport ballast to a railroad yard and drop it off.
- a ballast tank comprises a hollow body forming hoppers for the ballast and mounted on bogies for circulation on a railway track, the removal and distribution of the ballast along the railway being effected via openings. arranged in the lower part of the hoppers and each closed selectively by a mobile hatch, for example a hatch with a helmet.
- a ballast tank can include any number of hatches, but there are generally three hatches on each side of the tank divided into a front hatch, a central hatch and a rear hatch.
- ballast The distribution of the ballast along a railway is ensured by the continuous but slow advance, generally at about 5 km / h, of a ballast train containing any number of ballast boats, generally between three and twenty-two, which are used one after the other as the ballast is removed.
- each hatch namely its opening and closing movements
- a respective centralized levers on a platform of the ballast and controlling the operation of the hatches via devices transforming a movement of pivoting a lever respectively in a first direction and a second direction in a movement of the corresponding hatch in the opening and closing respectively of said hatch.
- the opening and closing maneuvers of the hatches and the control of the good distribution of the ballast are performed by at least two operators, an operator manually operating the levers of a ballast tank while a second operator operates next to the ballast tank to control the removal of the ballast and to transmit the appropriate instructions to the first operator.
- the mechanization systems above are in theory capable of satisfactorily solving the problems of safety and difficulty for the operators.
- the mechanization system must be chosen or modified according to the specific configuration of the trap door control of the ballast on which it is desired to install it, which in practice further limits the interest of mechanizing the control of the hatches.
- control member such as levers, flywheels, pedals, etc., which themselves control any type of mechanical equipment of a railway vehicle, such as a bunker hatch, a sunroof in a transport wagon etc.
- the mechanization system comprising a device for actuating the control member or members which comprises on the one hand connecting means removable to the rail vehicle, the mechanization system being characterized in that the actuating device comprises, on the other hand, detachable connecting means to the gripping portion of the or actuators, the actuating device being able to move the detachable connection means to the gripping portion of the or each control member relative to the detachable connecting means to the rail vehicle, so as to actuate, in use, the or each control member by moving its gripping portion.
- the actuating device comprises manual means of transport and maneuvering.
- the detachable connection means of the actuating device to the gripping portion of the control member or bodies and the means for removably connecting the actuating device to the railway vehicle are advantageously clamping connection means, which allows easy installation. and fast actuating device while taking into account the shapes and dimensions of the area where it is attached to the vehicle and the gripping portion of the or each control member, which may vary depending on the ballast boats.
- the means for detachably connecting the actuating device to the railway vehicle may comprise a support assembly adapted to be removably attached to the railway vehicle, the actuating device being connected, preferably removably, to the support assembly.
- the support assembly may be formed by a number of separate support pieces, one for each controller to be mechanized.
- the support assembly is advantageously constituted by a single piece forming an interface between the rail vehicle and the actuating device.
- the actuating device may comprise, for the or each control member, an actuating mechanism capable of actuating the respective control member, the actuating mechanism being connected on the one hand to the detachable connection means of the control device. actuation to the railway vehicle and, secondly, the detachable connecting means of the actuating device to the gripping portion of the respective control member.
- the or each actuating mechanism may comprise an actuator producing as output a movement of the same type as that of the gripping portion of the control member to which the actuating mechanism is connected, as well as means for transmitting the movement of output of the actuator to said control member.
- a "type" of motion is, for example, a rotational movement about one or more axes, a translational movement in one or more directions, or any compound motion of rotation and translation.
- the expression “same type” is understood to mean that if the movement of the gripping portion of the control member is a pivoting movement about an axis, then the output movement of the actuator is a pivotal movement about an axis parallel to the pivot axis of the gripping portion.
- the or each actuating mechanism may comprise an actuator producing at output a movement of a type different from that of the gripping portion of the control member to which the actuating mechanism is connected, as well as means of transforming the output movement of the actuator into the movement of said control member.
- the actuator of the actuating mechanism produces a translational movement output and is connected to an articulated arm assembly which is articulated to the detachable connection means to the gripping portion of the lever and whose arms are articulated so as to translating a translational movement produced by the actuator into one of opposite first and second translational directions into a pivoting movement of the lever in a respective first and second opposite pivoting direction.
- the means for removably connecting the actuating device to the railway vehicle comprise a support assembly as defined above
- the means for removably connecting the actuating device to the railway vehicle comprise a support assembly as defined above
- from the support assembly extend two parallel plates spaced apart from each other by providing between them a space for the passage of the articulated arm assembly, one end of the actuator being pivotally mounted about an axis extending between the two plates, in the free end region thereof, the other end of the actuator being support assembly side and hinged at one end of a first arm, itself pivotally mounted around an axis extending between the two plates in the support assembly-side region, the other end of the first arm being pivotally connected to one end of a second arm, the other end of which is pivotally connected to the lever, by the removable connection means, the pivot axes of the actuator, the first arm and the second arm being parallel to the pivot axis of the lever.
- the two parallel plates extend from a base plate provided with removable connection means to the support assembly.
- the system according to the present invention further comprises a control and power supply device for controlling the actuating device and providing it with the energy necessary to actuate the control device or bodies.
- Such a control device and power supply can, for example, be permanently placed on an existing railway vehicle or consist of a device already present on the rail vehicle.
- control device and power supply comprises detachable connecting means to the rail vehicle or the actuating device and, preferably, also manual means of transport and maneuvering.
- the support assembly where appropriate the interface piece, and / or the housing advantageously comprise means for removably hooking the housing to the support assembly.
- connection means of the automation part to the actuating device can be wired or wireless.
- the energy source portion is capable of supplying the energy required by the actuating device in the form it requires.
- the energy source portion may comprise a hydraulic pump and hydraulic connection means to the actuating device, where appropriate to the hydraulic actuator or actuators, so as to form a hydraulic circuit.
- the energy source portion may comprise an electrical energy storage device and means for charging the electrical energy storage device.
- an electric battery As an example of an electrical energy storage device, it is possible to give an electric battery, the charging means then being able to be constituted by a charger able to receive electrical energy from an external source, for example from an electrical network or from a power source. a generator.
- the energy source portion comprises an electrical energy storage device, for example an electric battery, and means for producing electrical energy by using the movement of the railway vehicle along the track, with a view to at least partially reloading the electrical energy storage device during the movement of the railway vehicle.
- an electrical energy storage device for example an electric battery
- the means for producing electrical energy may consist of a triboelectric generator having means for rubbing against a wheel of the railway vehicle in order to produce electricity.
- the energy source part may comprise firstly an electrical energy storage device, means for charging the electrical energy storage device or production means. electrical energy by using the movement of the rail vehicle along the track and, secondly, a hydraulic pump and hydraulic connection means to the actuating device, where appropriate to the or the hydraulic actuators, so as to form a hydraulic circuit.
- the energy source part may comprise an electrical energy storage device and may be means for charging the electrical energy.
- electrical energy storage device means for producing electrical energy by using the movement of the railway vehicle along the track.
- An example of an electrically-controlled but hydraulically-independent actuator is an actuator comprising one or more hydraulic actuators consisting of autonomous hydraulic cylinders, namely cylinders with integrated hydraulic power unit.
- the mechanization system according to the present invention may furthermore comprise a surveillance camera system comprising connecting means, possibly removable, enabling it to be turned towards the mechanical equipment whose operation is controlled by the control device or devices. , and a radio remote control capable of remotely controlling the automation part and communicating with the surveillance camera system, the radio control comprising a screen for the real-time display of the video taken by the surveillance camera system.
- the mechanization system according to the present invention may furthermore comprise position sensors connected to the automation part so as to communicate to it in real time sensor measurements and that the automation part is servocontrolled by using said sensor measurements.
- FIG. 1 it can be seen that there is shown the front of a ballast 1 having a platform 2 on each side of which are pivotally mounted three control levers 3 of three respective traps (not shown) of the ballast tank 1.
- each lever 3 is pivotally mounted on a base 4 fixed to the platform 2.
- each lever 3 comprises a gripping part, by which it is normally actuated by an operator standing on the platform 2, formed by a bar 5 and a yoke 6 to which the bar 5 is attached and which is connected to pivoting at the base 4, a locking hook 7 being provided and the three levers 3 pivoting about the same axis.
- a mechanization system is installed to mechanize the manual control of the three levers 3 on the left side of the platform 2 on the Figures 1 and 2 .
- the mechanization system comprises an actuating device 8 and a control and power supply device 9.
- the actuating device 8 comprises a support part 10 and, for each lever 3, an actuating mechanism 11 and a fastener 12.
- the support piece 10 is a mechanically welded piece formed by a hollow bar 13 of rectangular section on one side of which are welded two plates 14 extending perpendicular to it and having in their free end region a portion 15 projecting downwards, the free end terminating an elongated portion 16 provided with a through-hole 17.
- the distance between the portion 15 and the bar 13 is equal to the width of the plate 18 of the platform 2 on which the bases 4 are fixed, so that the portion 15 and the bar 13 are in contact with a slice of the plate 18.
- the support piece 10 is provided with means for detachably connecting the plate 18 by clamping, which are formed, for each plate 14, by a locking handle 19, a rod 20 and a latch 21.
- the locking handle 19 is pivotally mounted at 22 on the plate 14, in the bar-side region 13 and in the upper part of the plate 14, and is connected by the connecting rod 20 to the latch 21 pivotally mounted in 23 on the plate 14 above the portion 15 projecting downwards, the pivot axes of the locking handle 19 and the latch 21 being parallel.
- the pivoting of the locking handle 19 in one direction is transformed, by the rod 20, into a pivoting of the lock 21 in the opposite direction, the pivoting of the lock 21 being guided by a stud 24 carried by the lock 21 and sliding in a opening in an arc 25 formed in the plate 14.
- the lock 21 has a notch 26 formed in the lower part of its side facing the bar 13. As can be seen better on the Figure 6 , the latch 21 and the notch 26 are dimensioned and positioned so that when the locking handle 19 is lowered, as shown in FIGS. Figures 4 and 5 , the edge of the plate 18 is housed in the notch 26.
- the support piece 10 can be removably connected to the plate 18 by clamping between the locks 21 and the bar 13 following the lowering of the locking handles 19, the loosening being obtained simply by raising the handles Locking 18.
- Each attachment element comprises an upper hook 28 and a lower hook 29, whose function will be explained below.
- an actuating mechanism 11 comprises a frame 30, an actuator 31 and an articulated arm assembly 32.
- the frame 30 is a mechanically welded piece formed of a base plate 33 and two parallel plates 34 extending perpendicular to the latter and spaced apart from each other.
- Two parallel vertical slots 35 are provided, one on each vertical side of the mud plate 33, and a notch 36 is provided in the lower edge of the plate 33, each vertically of a slot 35.
- the spacing between the two slots 35, and indeed between the two notches 36, is equal to the spacing between two fastening elements 27 of the same pair.
- each actuating mechanism 11 can be removably connected to the support member 10 by applying the base plate 33 against the support member 10 by engaging each upper hook 28 in the respective slot 35 and each lower hook 29 in the notch. 36 respective.
- the plates 34 are tapered and an axis 37 extends between the end regions of the two plates 34.
- the actuator 31 is a self-contained hydraulic cylinder, comprising a jack 38 and its integrated hydraulic unit 39.
- the body of the jack 38 is pivotally mounted on the shaft 37 and the head of the jack 38 is pivotally connected to the assembly. articulated arms 32.
- the articulated arm assembly 32 is formed by a first arm 40 and a second arm 41.
- the first arm 40 is composed of two curved parallel plates 42 whose first, lower ends are pivotally connected at 43 to the cylinder head. 38 and whose second ends, upper, are pivotally connected at 44 to one end of the second arm 41 which is in the form of a rod.
- Each plate 42 is furthermore pivotally connected by an axis 45 extending between the two plates 34, in the vicinity of the base plate 33.
- the other end of the second arm 41 is pivotally connected at 46 to a fastener 12.
- the fastener 12 constitutes a means of removably connecting the articulated arm assembly 32 to the gripping portion of a lever 3.
- the fastener 12 comprises a tongue 47 on each side of which extends an L-shaped lateral portion 48, welded to the tongue 47 so as to form, in side view, an open U opposite the pivotal connection. with the second arm 41.
- each lateral portion 48 is in recess towards the opposite lateral portion 48.
- each lateral portion 48 On the end of each lateral portion 48 is provided a pair of first legs 50, bottom side of the U, one at the top and one at the bottom, and, free end side, a second tab 51 projecting a distance less than the first legs 50.
- the fastener 12 can be fixed releasably to the lever 3 by passing the tongue 47 and the lateral portions 48 into the opening of the yoke 6 until the first legs 50 abut against the side of the yoke. screed 6.
- the distance between firstly the first tabs 50 and the corresponding second tab 51 is equal to the width of the yoke 6 in the connection region between the latter and the fastener 12, and that the distance between the yokes two side portions 48 is equal to the width of the opening of the yoke 6, so that when the first lugs 50 abut against the yoke 6, the second lug 51 abuts against the opposite side of the yoke 6, the passage of the two parties laterally 48 in the opening the yoke 6 being made possible by the choice for the side portions 48 of a material allowing a slight elastic deformation.
- hooking elements 27 are positioned on the bar 13 so as to correspond to a respective lever 3.
- each actuating mechanism 11 can be removably connected to the support member 10 and to the gripping portion of a lever 3, as shown in FIG. Figure 3 .
- pivot axes of the various parts of the articulated arm assembly 32 are all parallel to each other and are parallel to the pivot axis of the levers 3.
- the actuating mechanism 11 thus makes it possible to mechanize the manual control of the lever 3.
- the fastener 12 can also be releasably connected to a latch 66 by virtue of the articulation of the first and second arms 40, 41, the actuating mechanism 11 being able to be easily transported in this position. by an operator.
- the lock 66 is an integral part of the two plates 34 and having two lateral wings 67 in each of which is formed an opening 68 in which is housed the corresponding lug 51, after slight elastic deformation of the side portions 48.
- the clip 12 is detached. lock 66 simply by pinching the two side portions 48 towards each other to disengage the tabs 51 from the openings 68.
- control device and power supply 9 of the mechanization system removably connected to the support part 10.
- the control device and power supply 9 is in the form of a bag 52 provided with two carrying handles 53 and removable attachment means to the support piece 10 in the form of a fixed plate rigidly on one side of the bag 10 and from which extends two pairs of legs 54 having a central opening 55 in which can pass the elongate portion 16 of the plate 14, the bag 10 being further provided with two locks 56 that the operator can engage in the through hole 17 to lock the bag 10 in position on the support piece 8.
- the bag 10 comprises a battery for supplying the actuators 31 with electrical energy by means of cables (not shown) that are connected to sockets 57 arranged on the cover of the bag 10, a power interface to adapt the output of the battery to the input of the actuator 31, an automation part, serving to control the supply of energy to the actuators 31 and comprising for example a calculator and a series of relays, a radio receiver allowing a operator to control the automation part remotely using a radio control, and a man-machine interface placed on the lid of the bag 10.
- the human-machine interface may include start-up buttons 58, a circuit breaker 59, an emergency stop button 60, run indicators of the battery 61, actuator 62, and so on.
- the battery can be recharged, via a socket 63 on the cover, by an external energy source, such as the electrical network, a generator, this energy source preferably being a source using the circulation of the ballast tank 1 to produce electricity, such as a triboelectric generator in contact with a wheel of the ballast tank 1 or a device mounted on the axle of a bogie.
- an external energy source such as the electrical network, a generator
- this energy source preferably being a source using the circulation of the ballast tank 1 to produce electricity, such as a triboelectric generator in contact with a wheel of the ballast tank 1 or a device mounted on the axle of a bogie.
- the automation part may be connected to the actuators 31 by cables (not shown) or wirelessly.
- the battery it is also possible for the battery to be able to supply other functions of the ballast tank, such as a lighting function or, for example, to supply, via a jack 64, a surveillance camera system filming the area of the hatches and communicating with a radio remote control provided with a display screen so that the operator can control the levers 3 according to what he sees on the screen, a camera on light 65 being provided on the lid.
- a lighting function such as a jack 64, a surveillance camera system filming the area of the hatches and communicating with a radio remote control provided with a display screen so that the operator can control the levers 3 according to what he sees on the screen, a camera on light 65 being provided on the lid.
- the operator can remain on the platform 2 throughout the removal of the ballast, which solves the problems of safety and hardship.
- the mechanization system according to the particular embodiment of the present invention described above allows, if desired, a single operator to perform the removal of the ballast, as follows.
- the operator first fixes the support part 10 on the plate 18, then fixes each actuating mechanism 11, the handling of which is facilitated by the possibility of placing them in the transport position shown in FIG. Figure 12 , to the support piece 10, before attaching it to the respective lever 3, and finally secures the bag 9 on the support piece 10.
- the operator can then control, using a radio remote control, the operation of each of the actuators 31, to lower or raise the lever 3 corresponding.
- the mechanization system according to the present invention makes it possible, on the one hand, to preserve the integrity of the railway vehicle, which in the railroad field makes it possible to have no substantial modification which would give rise to a binding procedure, long and costly to obtain approval for the use of the system on vehicles from the competent administrative services, and secondly to limit the number of systems to be acquired and put in place on the entire fleet of vehicles existing.
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Train Traffic Observation, Control, And Security (AREA)
- Vehicle Cleaning, Maintenance, Repair, Refitting, And Outriggers (AREA)
Description
- La présente invention se rapporte au domaine des véhicules ferroviaires et plus particulièrement à celui de la commande du fonctionnement d'un équipement mécanique d'un véhicule ferroviaire, notamment d'un véhicule ferroviaire de transport de marchandises ou de maintenance de voies ferrées.
- Comme exemple d'un véhicule de maintenance de voies ferrées on peut citer les ballastières, qui sont des wagons servant à transporter du ballast jusqu'à un chantier de voies ferrées et à l'y déposer.
- Une ballastière comprend à cet effet un corps creux formant des trémies pour le ballast et monté sur des boggies pour circulation sur une voie ferrée, la dépose et la répartition du ballast le long de la voie ferrée s'effectuant par l'intermédiaire d'ouvertures ménagées en partie inférieure des trémies et fermées chacune de manière sélective par une trappe mobile, par exemple une trappe à casque. Une ballastière peut comprendre un nombre quelconque de trappes, mais on prévoit généralement trois trappes de chaque côté du réservoir réparties en une trappe avant, une trappe centrale et une trappe arrière.
- La répartition du ballast le long d'une voie ferrée est assurée par l'avancée continue mais lente, généralement à environ 5 km/h, d'un train de ballast comportant un nombre quelconque de ballastières, généralement entre trois et vingt-deux, qui sont utilisées les unes après les autres au fur et à mesure de la dépose du ballast.
- Le fonctionnement de chaque trappe, à savoir ses mouvements d'ouverture et de fermeture, est commandé manuellement par l'un respectif de leviers centralisés sur une plateforme de la ballastière et commandant le fonctionnement des trappes par l'intermédiaire de dispositifs transformant un mouvement de pivotement d'un levier respectivement dans un premier sens et un second sens en un mouvement de la trappe correspondante dans les sens respectivement d'ouverture et de fermeture de ladite trappe.
- Dans un tel cas, les manoeuvres d'ouverture et de fermeture des trappes ainsi que le contrôle de la bonne répartition du ballast sont effectuées par au moins deux opérateurs, un opérateur actionnant manuellement les leviers d'une ballastière tandis qu'un deuxième opérateur marche à côté de la ballastière pour contrôler la dépose du ballast et transmettre les instructions appropriées au premier opérateur.
- Cela pose d'importants problèmes de sécurité pour les opérateurs qui doivent se déplacer sur un sol irrégulier, généralement du ballast lui-même, ainsi que monter et descendre des ballastières en ordre de marche, alors que la voie ferrée adjacente est souvent encore ouverte à la circulation. Ces problèmes sont amplifiés lorsque la dépose du ballast se fait lors d'intempéries ou de nuit, l'éclairage étant la plupart du temps assez faible, car assuré uniquement par des lampes frontales ou des ballons lumineux le long de la voie ferrée.
- Par ailleurs, des efforts physiques importants sont demandés aux opérateurs, pour monter et descendre des ballastières et actionner les leviers, ce qui pose d'importants problèmes de pénibilité pour les opérateurs.
- Afin de résoudre les problèmes mentionnés ci-dessus, ont été proposés différents systèmes de mécanisation des trappes faisant intervenir des moteurs ou des vérins placés au niveau du corps de la ballastière et agissant directement sur les trappes, avec commande à distance. Un exemple d'une telle mécanisation est divulgué dans le brevet américain
US 5 311 822 . - Il a également été proposé, dans le brevet français
FR 2 929 219 - Les systèmes de mécanisation ci-dessus sont en théorie capables de résoudre de manière satisfaisante les problèmes de sécurité et de pénibilité pour les opérateurs.
- Toutefois, la mécanisation de la commande des trappes ou des leviers par ces systèmes engendre des coûts relativement importants et nécessitent pour leur installation sur une ballastière d'immobiliser cette dernière pendant une durée conséquente durant laquelle elle ne peut pas être utilisée.
- Par ailleurs, le système de mécanisation doit être choisi ou modifié en fonction de la configuration spécifique de la commande des trappes de la ballastière sur laquelle on souhaite l'installer, ce qui en pratique limite encore l'intérêt de mécaniser la commande des trappes.
- Les inconvénients mentionnés ci-dessus empêchent les systèmes de mécanisation connus de se répandre à l'ensemble du parc de ballastières existantes.
- Il y a donc un besoin pour un système permettant une mécanisation de la commande des trappes à un coût inférieur, avec une durée réduite d'immobilisation de la ballastière et pour lequel les modifications à lui apporter pour tenir compte de la ballastière sur lequel il doit être installé sont rendues minimales.
- La société déposante s'est également aperçue qu'il serait avantageux que les moyens mis en oeuvre dans un tel système de mécanisation ne soient pas limités à la mécanisation de leviers de commande de trappes de ballastière, mais permettent l'actionnement de tout type d'organe de commande, tels que des leviers, des volants, des pédales, etc., qui eux-mêmes commandent tout type d'équipement mécanique de véhicule ferroviaire, tel qu'une trappe de ballastière, un toit ouvrant dans un wagon de transport, etc.
- Selon la présente invention, ce besoin peut être satisfait par un système de mécanisation de la commande manuelle d'au moins un organe de commande dont l'actionnement commande le fonctionnement d'un équipement mécanique d'un véhicule ferroviaire, le ou chaque organe de commande étant monté mobile sur le véhicule ferroviaire et comprenant une partie de préhension par laquelle l'organe de commande est actionné, le système de mécanisation comprenant un dispositif d'actionnement du ou des organes de commande qui comprend d'une part des moyens de liaison amovible au véhicule ferroviaire, le système de mécanisation étant caractérisé par le fait que le dispositif d'actionnement comprend, d'autre part, des moyens de liaison amovible à la partie de préhension du ou des organes de commande, le dispositif d'actionnement étant apte à déplacer les moyens de liaison amovible à la partie de préhension du ou de chaque organe de commande par rapport aux moyens de liaison amovible au véhicule ferroviaire, de façon à actionner, en utilisation, le ou chaque organe de commande par déplacement de sa partie de préhension.
- De préférence, le dispositif d'actionnement comporte des moyens manuels de transport et de manoeuvre.
- Les moyens de liaison amovible du dispositif d'actionnement à la partie de préhension du ou des organes de commande et les moyens de liaison amovible du dispositif d'actionnement au véhicule ferroviaire sont avantageusement des moyens de liaison par serrage, ce qui permet une installation aisée et rapide du dispositif d'actionnement tout en tenant compte des formes et dimensions de la zone où il est fixé au véhicule et de la partie de préhension du ou de chaque organe de commande, lesquelles peuvent varier suivant les ballastières.
- Les moyens de liaison amovible du dispositif d'actionnement au véhicule ferroviaire peuvent comprendre un ensemble support apte à être fixé de manière amovible au véhicule ferroviaire, le dispositif d'actionnement étant relié, de préférence de manière amovible, à l'ensemble support.
- L'ensemble support peut être formé par un certain nombre de pièces de support séparées, une pour chaque organe de commande à mécaniser.
- Pour la mécanisation de la commande manuelle d'une pluralité d'organes de commande, l'ensemble support est avantageusement constitué par une seule pièce formant interface entre le véhicule ferroviaire et le dispositif d'actionnement.
- Le dispositif d'actionnement peut comprendre, pour le ou chaque organe de commande, un mécanisme d'actionnement apte à actionner l'organe de commande respectif, le mécanisme d'actionnement étant relié d'une part aux moyens de liaison amovible du dispositif d'actionnement au véhicule ferroviaire et, d'autre part, aux moyens de liaison amovible du dispositif d'actionnement à la partie de préhension de l'organe de commande respectif.
- Le ou chaque mécanisme d'actionnement peut comprendre un actionneur produisant en sortie un mouvement du même type que celui de la partie de préhension de l'organe de commande auquel est relié le mécanisme d'actionnement, ainsi que des moyens de transmission du mouvement de sortie de l'actionneur audit organe de commande.
- Dans la présente demande, un « type » de mouvement est, par exemple, un mouvement de rotation autour d'un ou plusieurs axes, un mouvement de translation selon une ou plusieurs directions, ou un quelconque mouvement composé de rotation et de translation. Par exemple, on entend par l'expression « même type » que si le mouvement de la partie de préhension de l'organe de commande est un mouvement de pivotement autour d'un axe, alors le mouvement de sortie de l'actionneur est un mouvement de pivotement autour d'un axe parallèle à l'axe de pivotement de la partie de préhension.
- En variante, le ou chaque mécanisme d'actionnement peut comprendre un actionneur produisant en sortie un mouvement d'un type différent de celui de la partie de préhension de l'organe de commande auquel est relié le mécanisme d'actionnement, ainsi que des moyens de transformation du mouvement de sortie de l'actionneur en le mouvement dudit organe de commande.
- Pour la mécanisation de la commande manuelle d'au moins un organe de commande constitué par un levier monté à pivotement par rapport au véhicule ferroviaire autour d'un axe de pivotement, selon un mode de réalisation particulier de la présente invention, pour le ou chaque levier, l'actionneur du mécanisme d'actionnement produit en sortie un mouvement de translation et est relié à un ensemble à bras articulés qui est articulé aux moyens de liaison amovible à la partie de préhension du levier et dont les bras sont articulés de manière à transformer un mouvement de translation produit par l'actionneur dans l'un de premier et second sens de translation opposés en un mouvement de pivotement du levier dans l'un respectif de premier et second sens de pivotement opposés.
- Dans un système dans lequel les moyens de liaison amovible du dispositif d'actionnement au véhicule ferroviaire comprennent un ensemble support tel que défini ci-dessus, sont avantageusement prévus des moyens pour relier de manière amovible à l'ensemble support les moyens de liaison amovible au levier, avec de préférence une ouverture ménagée dans l'un des bras pour former les moyens manuels de transport et de manoeuvre.
- Dans un système dans lequel les moyens de liaison amovible du dispositif d'actionnement au véhicule ferroviaire comprennent un ensemble support tel que défini ci-dessus, selon un mode de réalisation particulier de la présente invention, à partir de l'ensemble support s'étendent deux plaques parallèles écartées l'une de l'autre en ménageant entre elles un espace pour le passage de l'ensemble à bras articulés, une extrémité de l'actionneur étant montée à pivotement autour d'un axe s'étendant entre les deux plaques, dans la région d'extrémité libre de celles-ci, l'autre extrémité de l'actionneur étant côté ensemble support et articulée à une extrémité d'un premier bras, lui-même monté à pivotement autour d'un axe s'étendant entre les deux plaques dans la région côté ensemble support, l'autre extrémité du premier bras étant reliée à pivotement à une extrémité d'un second bras dont l'autre extrémité est reliée à pivotement au levier, par les moyens de liaison amovible, les axes de pivotement de l'actionneur, du premier bras et du second bras étant parallèles à l'axe de pivotement du levier.
- De préférence, les deux plaques parallèles s'étendent à partir d'une plaque de base munie de moyens de liaison amovible à l'ensemble support.
- De préférence, le système selon la présente invention comprend en outre un dispositif de commande et d'alimentation en énergie pour commander le dispositif d'actionnement et lui fournir l'énergie nécessaire pour actionner le ou les organes de commande.
- Un tel dispositif de commande et d'alimentation en énergie peut, par exemple, être placé à demeure sur un véhicule ferroviaire existant ou consister en un dispositif déjà présent sur le véhicule ferroviaire.
- De préférence, le dispositif de commande et d'alimentation en énergie comprend des moyens de liaison amovible au véhicule ferroviaire ou au dispositif d'actionnement et, de préférence, également des moyens manuels de transport et de manoeuvre.
- De préférence, le dispositif de commande et d'alimentation en énergie se présente sous la forme d'un boîtier muni des moyens de liaison amovible au véhicule ferroviaire ou au dispositif d'actionnement, ainsi que de moyens manuels de transport et de manoeuvre, et dans lequel sont logés :
- une partie source d'énergie pour le dispositif d'actionnement,
- une interface de puissance placée de manière fonctionnelle entre la partie source d'énergie et le dispositif d'actionnement,
- une partie automatisme destinée à commander l'alimentation en énergie du dispositif d'actionnement par la partie source d'énergie,
- des moyens de connexion de la partie automatisme et de la partie source d'énergie au dispositif d'actionnement, et
- une interface homme-machine et un récepteur radio pour permettre le pilotage de la partie automatisme à l'aide d'une radiocommande.
- L'ensemble support, le cas échéant la pièce formant interface, et/ou le boîtier comprennent avantageusement des moyens d'accrochage amovible du boîtier à l'ensemble support.
- Les moyens de connexion de la partie automatisme au dispositif d'actionnement peuvent être filaires ou sans fil.
- La partie source d'énergie est apte à fournir l'énergie nécessaire au dispositif d'actionnement sous la forme qu'il requiert.
- Ainsi, dans le cas où le dispositif d'actionnement est hydraulique, la partie source d'énergie peut comprendre une pompe hydraulique et des moyens de raccordement hydraulique au dispositif d'actionnement, le cas échéant au ou aux actionneurs hydrauliques, de façon à former un circuit hydraulique.
- Dans le cas où le dispositif d'actionnement est électrique, la partie source d'énergie peut comprendre un dispositif de stockage d'énergie électrique et des moyens pour charger le dispositif de stockage d'énergie électrique.
- On peut donner comme exemple de dispositif de stockage d'énergie électrique une batterie électrique, les moyens de chargement pouvant alors être constitués par un chargeur apte à recevoir de l'énergie électrique depuis une source extérieure, par exemple d'un réseau électrique ou d'un groupe électrogène.
- De préférence, la partie source d'énergie comprend un dispositif de stockage d'énergie électrique, par exemple une batterie électrique, et des moyens de production d'énergie électrique par utilisation du déplacement du véhicule ferroviaire le long de la voie, en vue de recharger au moins partiellement le dispositif de stockage d'énergie électrique pendant le déplacement du véhicule ferroviaire.
- Les moyens de production d'énergie électrique peuvent consister en un générateur triboélectrique présentant des moyens destinés à frotter contre une roue du véhicule ferroviaire en vue de produire de l'électricité.
- Dans le cas où le dispositif d'actionnement est électrohydraulique, la partie source d'énergie peut comprendre d'une part un dispositif de stockage d'énergie électrique, des moyens pour charger le dispositif de stockage d'énergie électrique ou des moyens de production d'énergie électrique par utilisation du déplacement du véhicule ferroviaire le long de la voie et, d'autre part, une pompe hydraulique et des moyens de raccordement hydraulique au dispositif d'actionnement, le cas échéant au ou aux actionneurs hydrauliques, de façon à former un circuit hydraulique.
- Dans le cas où le dispositif d'actionnement est électrohydraulique, dont la commande est électrique mais qui est autonome du point de vue hydraulique, la partie source d'énergie peut comprendre un dispositif de stockage d'énergie électrique et soit des moyens pour charger le dispositif de stockage d'énergie électrique, soit des moyens de production d'énergie électrique par utilisation du déplacement du véhicule ferroviaire le long de la voie.
- Un exemple de dispositif d'actionnement à commande électrique mais autonome du point de vue hydraulique est un dispositif d'actionnement comprenant un ou plusieurs actionneurs hydrauliques consistant en vérins hydrauliques autonomes, à savoir des vérins avec centrale hydraulique intégrée.
- Le système de mécanisation selon la présente invention peut comprendre en outre un système de caméra de surveillance comportant des moyens de liaison, éventuellement amovible, lui permettant d'être tourné vers l'équipement mécanique dont le fonctionnement est commandé par le ou les organes de commande, et une radiocommande apte à piloter à distance la partie automatisme et à communiquer avec le système de caméra de surveillance, la radiocommande comportant un écran pour l'affichage en temps réel de la vidéo prise par le système de caméra de surveillance.
- Le système de mécanisation selon la présente invention peut comprendre en outre des capteurs de position reliés à la partie automatisme de façon à lui communiquer en temps réel des mesures de capteur et que la partie automatisme est asservie en utilisant lesdites mesures de capteur.
- La présente invention porte également sur un procédé de commande du fonctionnement d'au moins un équipement mécanique d'un véhicule ferroviaire, le fonctionnement du ou de chaque équipement mécanique étant commandé par un organe de commande à commande manuelle, le ou chaque organe de commande étant monté mobile sur le véhicule ferroviaire et comprenant une partie de préhension par laquelle l'organe de commande est actionné, caractérisé par le fait que :
- on installe un système de mécanisation tel que défini ci-dessus en reliant de manière amovible le dispositif d'actionnement d'une part au véhicule ferroviaire, à l'aide desdits moyens de liaison amovible au véhicule ferroviaire, et d'autre part à la partie de préhension du ou des organes de commande, à l'aide desdits moyens de liaison amovible à la partie de préhension du ou des organes de commande ;
- on commande le dispositif d'actionnement pour actionner le ou chaque organe de commande par déplacement de la partie de préhension du ou de chaque organe de commande, et commander ainsi le fonctionnement souhaité dudit ou desdits équipements mécaniques ; et
- à la fin du fonctionnement souhaité dudit ou desdits équipements mécaniques, on retire ledit système de mécanisation en le séparant du véhicule ferroviaire et du ou des organes de commande.
- Pour mieux illustrer l'objet de la présente invention, on va en décrire ci-après, à titre indicatif et non limitatif, un mode de réalisation particulier avec référence au dessin annexé.
- Sur ce dessin :
- la
Figure 1 est une vue en perspective d'une plateforme de ballastière sur chaque côté de laquelle sont montés trois leviers, les leviers d'un premier côté étant à commande manuelle et un système de mécanisation de la commande des leviers selon un mode de réalisation de la présente invention étant installé sur le second côté, la plateforme étant vue du premier côté ; - la
Figure 2 est une vue en perspective de la plateforme de laFigure 1 , vue du second côté ; - la
Figure 3 est une vue en perspective montrant seulement le dispositif d'actionnement et les trois leviers ; - les
Figures 4 et 5 sont deux vues en perspective, dans différentes directions, de l'ensemble support ; - la
Figure 6 est une vue en perspective illustrant la manière dont l'ensemble support est fixé à la plateforme ; - les
Figures 7 et8 sont des vues en perspective, dans différentes directions, d'un mécanisme d'actionnement du dispositif d'actionnement ; - les
Figures 9 et 10 sont des vues en perspective, dans différentes directions, illustrant la manière dont le mécanisme d'actionnement est relié de manière amovible à un levier ; - la
Figure 11 est une vue en perspective d'un levier et de son mécanisme d'actionnement, dans la position levier abaissé ; - la
Figure 12 est une vue en perspective d'un mécanisme d'actionnement dans sa position escamotée de transport ; et - les
Figures 13 et 14 sont des vues en perspective, dans différentes directions, d'un dispositif de commande et d'alimentation en énergie se présentant sous la forme d'une valise, montée sur l'ensemble support du dispositif d'actionnement. - Si l'on se réfère aux
Figures 1 et 2 , on peut voir que l'on y a représenté l'avant d'une ballastière 1 comportant une plateforme 2 sur chaque côté de laquelle sont montés à pivotement trois leviers 3 de commande de trois trappes respectives (non représentées) de la ballastière 1. - On pourra se référer au brevet français
FR 2 929 219 - Comme on peut mieux le voir si l'on regarde les leviers 3 non équipés du système de mécanisation, sur le côté droit sur les
Figures 1 et 2 , chaque levier 3 est monté à pivotement sur une base 4 fixée sur la plateforme 2. En particulier, si l'on se réfère également à laFigure 3 , on peut voir que chaque levier 3 comprend une partie de préhension, par laquelle elle est normalement actionnée par un opérateur debout sur la plateforme 2, formée par une barre 5 et une chape 6 à laquelle est fixée la barre 5 et qui est reliée à pivotement à la base 4, un crochet de blocage 7 étant prévu et les trois leviers 3 pivotant autour d'un même axe. - Un système de mécanisation selon un mode réalisation particulier de la présente invention est installé pour mécaniser la commande manuelle des trois leviers 3 sur le côté gauche de la plateforme 2 sur les
Figures 1 et 2 . - Le système de mécanisation comprend un dispositif d'actionnement 8 et un dispositif de commande et d'alimentation en énergie 9.
- Le dispositif d'actionnement 8 comprend une pièce support 10 et, pour chaque levier 3, un mécanisme d'actionnement 11 et une attache 12.
- Si l'on se réfère aux
Figures 4 et 5 , on peut voir que la pièce support 10 est une pièce mécanosoudée formée par un barreau creux 13 de section rectangulaire sur un côté duquel sont soudées deux plaques 14 s'étendant perpendiculairement à celui-ci et présentant dans leur région d'extrémité libre une partie 15 en saillie vers le bas, l'extrémité libre se terminant une partie allongée 16 munie d'un trou traversant 17. - Comme on peut mieux le voir sur la
Figure 5 , la distance entre la partie 15 et le barreau 13 est égale à la largeur de la platine 18 de la plateforme 2 sur laquelle sont fixées les bases 4, de telle sorte que la partie 15 et le barreau 13 sont en contact avec une tranche de la platine 18. - La pièce support 10 est munie de moyens de liaison amovible à la platine 18 par serrage, lesquels sont formés, pour chaque plaque 14, par une poignée de verrouillage 19, une bielle 20 et un verrou 21.
- La poignée de verrouillage 19 est montée à pivotement en 22 sur la plaque 14, dans la région côté barreau 13 et en partie supérieure de la plaque 14, et est reliée par la bielle 20 au verrou 21 monté à pivotement en 23 sur la plaque 14 au-dessus de la partie 15 en saillie vers le bas, les axes de pivotement de la poignée de verrouillage 19 et du verrou 21 étant parallèles.
- Le pivotement de la poignée de verrouillage 19 dans un sens est transformé, par la bielle 20, en un pivotement du verrou 21 dans le sens opposé, le pivotement du verrou 21 étant guidé par un plot 24 porté par le verrou 21 et coulissant dans une ouverture en arc de cercle 25 ménagée dans la plaque 14.
- Le verrou 21 présente une encoche 26 pratiquée dans la partie inférieure de son côté tourné vers le barreau 13. Comme on peut mieux le voir sur la
Figure 6 , le verrou 21 et l'encoche 26 sont dimensionnés et positionnés de telle sorte que lorsque la poignée de verrouillage 19 est abaissée, comme représenté sur lesFigures 4 et 5 , la tranche de la platine 18 vient se loger dans l'encoche 26. - En d'autres termes, la pièce support 10 peut être reliée de manière amovible sur la platine 18 par serrage entre les verrous 21 et le barreau 13 suite à l'abaissement des poignées de verrouillage 19, le desserrage étant obtenu simplement en remontant les poignées de verrouillage 18.
- Par ailleurs, trois paires d'éléments d'accrochage 27 sont soudées sur le barreau 13, côté opposé aux plaques 14, avec un écartement donné entre deux éléments d'accrochage 27 d'une même paire. Chaque élément d'accrochage comprend un crochet supérieur 28 et un crochet inférieur 29, dont la fonction sera explicitée ci-après.
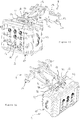
- Si l'on se réfère maintenant aux
Figures 7 et8 , on peut voir qu'un mécanisme d'actionnement 11 comprend un châssis 30, un actionneur 31 et un ensemble à bras articulés 32. - Le châssis 30 est une pièce mécanosoudée formée d'une plaque de base 33 et de deux plaques parallèles 34 s'étendant perpendiculairement à cette dernière et écartées l'une de l'autre.
- Deux fentes verticales parallèles 35 sont prévues, une de chaque côté vertical de la plaque de vase 33, et une encoche 36 est ménagée dans le bord inférieur de la plaque 33, chacune à la verticale d'une fente 35. L'espacement entre les deux fentes 35, et de fait entre les deux encoches 36, est égal à l'espacement entre deux éléments d'accrochage 27 d'une même paire.
- Ainsi, comme on peut le voir sur la
Figure 3 , on peut relier de manière amovible chaque mécanisme d'actionnement 11 à la pièce support 10 en appliquant la plaque de base 33 contre la pièce support 10 en engageant chaque crochet supérieur 28 dans la fente 35 respectives et chaque crochet inférieur 29 dans l'encoche 36 respective. - Les plaques 34 sont effilées et un axe 37 s'étend entre les régions d'extrémité des deux plaques 34.
- L'actionneur 31 est un vérin hydraulique autonome, comprenant un vérin 38 et sa centrale hydraulique intégrée 39. Le corps du vérin 38 est monté à pivotement sur l'axe 37 et la tête du vérin 38 est reliée à pivotement à l'ensemble à bras articulés 32.
- L'ensemble à bras articulés 32 est formé par un premier bras 40 et un second bras 41. Le premier bras 40 est composé de deux plaques parallèles 42 courbes dont les premières extrémités, inférieures, sont reliées à pivotement en 43 à la tête du vérin 38 et dont les secondes extrémités, supérieures, sont reliées à pivotement en 44 à une extrémité du second bras 41 qui se présente sous la forme d'une tige. Chaque plaque 42 est en outre reliée à pivotement par un axe 45 s'étendant entre les deux plaques 34, au voisinage de la plaque de base 33. L'autre extrémité du second bras 41 est reliée à pivotement en 46 à une attache 12.
- L'attache 12 constitue un moyen de liaison amovible de l'ensemble à bras articulés 32 à la partie de préhension d'un levier 3.
- L'attache 12 comprend une languette 47 de chaque côté de laquelle s'étend une partie latérale 48 en L, soudée à la languette 47 de façon à former, en vue de côté, un U ouvert à l'opposé de la liaison à pivotement avec le second bras 41.
- L'extrémité libre 49 de chaque partie latérale 48 est en décrochement vers la partie latérale 48 opposée.
- Sur l'extrémité de chaque partie latérale 48 est prévue une paire de premières pattes 50, côté fond du U, une en haut et une en bas, et, côté extrémité libre, une seconde patte 51 faisant saillie sur une distance moins grande que les premières pattes 50.
- Comme on peut mieux le voir sur les
Figures 9 et 10 , on peut fixer l'attache 12 de manière amovible au levier 3 en faisant passer la languette 47 et les parties latérales 48 dans l'ouverture de la chape 6 jusqu'à ce que les premières pattes 50 soient en butée contre le côté de la chape 6. - On souligne ici que la distance entre d'une part les premières pattes 50 et la seconde patte 51 correspondante est égale à la largeur de la chape 6 dans la région de liaison entre cette dernière et l'attache 12, et que la distance entre les deux parties latérales 48 est égale à la largeur de l'ouverture de la chape 6, de telle sorte que, lorsque les premières pattes 50 sont en butée contre la chape 6, la seconde patte 51 est en butée contre le côté opposé de la chape 6, le passage des deux parties latérales 48 dans l'ouverture la chape 6 étant rendu possible par le choix pour les parties latérales 48 d'un matériau autorisant une légère déformation élastique.
- On souligne également que les éléments d'accrochage 27 sont positionnés sur le barreau 13 de façon à correspondre à un levier 3 respectif.
- En résumé, chaque mécanisme d'actionnement 11 peut être relié de manière amovible à la pièce support 10 et à la partie de préhension d'un levier 3, comme représenté sur la
Figure 3 . - Sur cette Figure, on a représenté les mécanismes d'actionnement 11 dans la position non actionnée des leviers 3, dans laquelle les leviers 3 sont sensiblement à la verticale, les bras articulés 40, 41 sont déployés et la tête du vérin 38 est en position rétractée.
- On souligne ici que les axes de pivotement des différentes pièces de l'ensemble à bras articulés 32 sont tous parallèles entre eux et sont parallèles à l'axe de pivotement des leviers 3.
- Lorsque l'on souhaite actionner l'un des leviers 3, il suffit de commander l'extension de la tête du vérin 38, laquelle extension amènera le premier bras 40 à pivoter dans le sens des aiguilles d'une montre, si l'on observe la
Figure 3 , ce qui amènera simultanément le second bras 41 à tirer vers le bas et vers l'extérieur la partie de préhension à laquelle il est relié, faisant ainsi pivoter le levier 3 vers sa position actionnée. - On a représenté sur la
Figure 11 un levier 3 et un mécanisme d'actionnement 11 dans la position actionnée, la course du vérin 38 étant choisie pour que le levier 3 soit complètement abaissé lorsque la tête du vérin 38 se trouve dans sa position d'extension extrême. - A l'évidence, la rétraction de la tête du vérin 38 amènera les premier et second bras 40, 41 à pivoter dans un sens opposé, faisant ainsi pivoter le levier 3 dans le sens opposé, de la position actionnée à la position non-actionnée.
- Le mécanisme d'actionnement 11 selon ce mode de réalisation particulier de la présente invention permet donc de mécaniser la commande manuelle du levier 3.
- Si l'on se réfère maintenant à la
Figure 12 , on peut voir que l'attache 12 peut également être reliée de manière amovible à un verrou 66, grâce à l'articulation des premier et second bras 40, 41, le mécanisme d'actionnement 11 pouvant dans cette position être transporté de manière aisée par un opérateur. - Le verrou 66 est une pièce solidaire des deux plaques 34 et présentant deux ailes latérales 67 dans chacune desquelles est pratiquée une ouverture 68 dans laquelle vient se loger la patte 51 correspondante, après légère déformation élastique des parties latérales 48. On détache l'attache 12 du verrou 66 simplement en pinçant les deux parties latérales 48 l'une vers l'autre pour désengager les pattes 51 des ouvertures 68.
- Si l'on se réfère maintenant à la
Figure 13 , on peut voir que l'on y a représenté le dispositif de commande et d'alimentation en énergie 9 du système de mécanisation, relié de manière amovible à la pièce support 10. - Le dispositif de commande et d'alimentation en énergie 9 se présente sous la forme d'une valise 52 munie de deux poignées de transport 53 et des moyens d'accrochage amovible à la pièce support 10 se présentant sous la forme d'une plaque fixée de manière rigide sur un côté de la valise 10 et à partir de laquelle s'étend deux paires de pattes 54 présentant une ouverture centrale 55 dans laquelle peut passer la partie allongée 16 de la plaque 14, la valise 10 étant en outre munie de deux verrous 56 que l'opérateur peut engager dans le trou traversant 17 pour bloquer en position la valise 10 sur la pièce support 8.
- La valise 10 comprend une batterie, pour l'alimentation des actionneurs 31 en énergie électrique par l'intermédiaire de câbles (non représentés) que l'on vient brancher sur des prises 57 disposées sur le couvercle de la valise 10, une interface de puissance pour adapter la sortie de la batterie à l'entrée de l'actionneur 31, une partie automatisme, servant à commander la fourniture d'énergie aux actionneurs 31 et comprenant par exemple un calculateur et une série de relais, un récepteur radio permettant à un opérateur de piloter la partie automatisme à distance à l'aide d'une radiocommande, et une interface homme-machine placée sur le couvercle de la valise 10.
- L'interface homme-machine peut comprendre des boutons de mise en service 58, un coupe-circuit 59, un bouton d'arrêt d'urgence 60, des voyants de marche de la batterie 61, du dispositif d'actionnement 62, etc.
- La batterie peut être rechargée, par l'intermédiaire d'une prise 63 sur le couvercle, par une source d'énergie extérieure, telle que le réseau électrique, un groupe électrogène, cette source d'énergie étant de préférence une source utilisant la circulation de la ballastière 1 pour produire de l'électricité, telle qu'un générateur triboélectrique en contact avec une roue de la ballastière 1 ou un dispositif monté sur l'essieu d'un boggie.
- La partie automatisme peut être connectée aux actionneurs 31 par des câbles (non représentés) ou de manière sans fil.
- On peut également prévoir que la batterie puisse alimenter d'autres fonctions de la ballastière, telles qu'une fonction d'éclairage ou par exemple alimenter, via une prise 64, un système de caméra de surveillance filmant la zone des trappes et communiquant avec une radiocommande munie d'un écran d'affichage pour que l'opérateur puisse commander les leviers 3 en fonction de ce qu'il voit sur l'écran, un voyant de marche caméra 65 étant prévu sur le couvercle.
- L'opérateur peut ainsi rester sur la plateforme 2 tout au long de la dépose du ballast, ce qui permet de résoudre les problèmes de sécurité et de pénibilité.
- Le système de mécanisation selon le mode de réalisation particulier de la présente invention décrit ci-dessus permet, si on le souhaite, à un seul opérateur de réaliser la dépose du ballast, de la manière suivante.
- L'opérateur fixe tout d'abord la pièce support 10 sur la platine 18, puis fixe chaque mécanisme d'actionnement 11, dont la manipulation est facilitée par la possibilité de les placer dans la position de transport représentée sur la
Figure 12 , à la pièce support 10, avant de le fixer au levier 3 respectif, et enfin fixe la valise 9 sur la pièce support 10. - L'opérateur peut ensuite commander, à l'aide d'une radiocommande, le fonctionnement de chacun des actionneurs 31, pour abaisser ou relever le levier 3 correspondant.
- On constate donc que l'installation du système de mécanisation selon la présente invention est particulièrement aisée et rapide.
- Il présente en outre l'avantage essentiel de pouvoir être adapté sur une ballastière existence, sans aucune intervention d'adaptation de cette dernière. La durée d'immobilisation est donc réduite à un minimum, qui correspond seulement au temps nécessaire pour installer un système de mécanisation sur chaque série de trois leviers.
- En d'autres termes, le système de mécanisation selon la présente invention permet, d'une part, de préserver l'intégrité du véhicule ferroviaire, ce qui dans le domaine ferroviaire permet de ne pas avoir de modification substantielle qui engendrerait une procédure contraignante, longue et coûteuse pour obtenir auprès des services administratifs compétents l'agrément d'utilisation du système sur les véhicules, et, d'autre part, de limiter le nombre de systèmes à acquérir et à mettre en place sur l'ensemble du parc de véhicules existants.
- Il est bien entendu que les modes de réalisation ci-dessus de la présente invention ont été donnés à titre indicatif et non limitatif et que des modifications pourront y être apportées sans que l'on s'écarte pour autant du cadre de la présente invention.
Claims (23)
- - Système de mécanisation de la commande manuelle d'au moins un organe de commande (3) dont l'actionnement commande le fonctionnement d'un équipement mécanique d'un véhicule ferroviaire (1), le ou chaque organe de commande (3) étant monté mobile sur le véhicule ferroviaire (1) et comprenant une partie de préhension par laquelle l'organe de commande (3) est actionné, le système de mécanisation comprenant un dispositif d'actionnement (8) du ou des organes de commande (3) qui comprend d'une part des moyens de liaison amovible au véhicule ferroviaire (1), le système de mécanisation étant caractérisé par le fait que le dispositif d'actionnement (8) comprend, d'autre part, des moyens de liaison amovible (12) à la partie de préhension du ou des organes de commande (3), le dispositif d'actionnement (8) étant apte à déplacer les moyens de liaison amovible (12) à la partie de préhension du ou de chaque organe de commande (3) par rapport aux moyens de liaison amovible au véhicule ferroviaire (1), de façon à actionner, en utilisation, le ou chaque organe de commande (3) par déplacement de sa partie de préhension.
- - Système selon la revendication 1, caractérisé par le fait que le dispositif d'actionnement (8) comporte des moyens manuels de transport et de manoeuvre.
- - Système selon l'une des revendications 1 et 2, caractérisé par le fait que les moyens de liaison amovible (12) du dispositif d'actionnement (8) à la partie de préhension du ou des organes de commande (3) et les moyens de liaison amovible du dispositif d'actionnement (8) au véhicule ferroviaire (1) sont des moyens de liaison par serrage.
- - Système selon l'une des revendications 1 à 3, caractérisé par le fait que les moyens de liaison amovible du dispositif d'actionnement (8) au véhicule ferroviaire (1) comprennent un ensemble support (10) apte à être fixé de manière amovible, le cas échéant par serrage, au véhicule ferroviaire (1), le dispositif d'actionnement (8) étant relié, de préférence de manière amovible, à l'ensemble support (10).
- - Système selon la revendication 4, pour la mécanisation de la commande manuelle d'une pluralité d'organes de commande (3), caractérisé par le fait que l'ensemble support (10) est constitué par une seule pièce (10) formant interface entre le véhicule ferroviaire (1) et le dispositif d'actionnement (8).
- - Système selon l'une des revendications 1 à 5, caractérisé par le fait que le dispositif d'actionnement (8) comprend, pour le ou chaque organe de commande (3), un mécanisme d'actionnement (11) apte à actionner l'organe de commande respectif (3), le mécanisme d'actionnement (11) étant relié d'une part aux moyens de liaison amovible du dispositif d'actionnement (8) au véhicule ferroviaire (1) et, d'autre part, aux moyens de liaison amovible (12) du dispositif d'actionnement (8) à la partie de préhension de l'organe de commande respectif (3).
- - Système selon la revendication 6, caractérisé par le fait que le ou chaque mécanisme d'actionnement (11) comprend un actionneur (31) produisant en sortie un mouvement du même type que celui de la partie de préhension de l'organe de commande (3) auquel est relié le mécanisme d'actionnement (11), ainsi que des moyens de transmission du mouvement de sortie de l'actionneur (31) audit organe de commande (3).
- - Système selon la revendication 6, caractérisé par le fait que le ou chaque mécanisme d'actionnement (11) comprend un actionneur (31) produisant en sortie un mouvement d'un type différent de celui de la partie de préhension de l'organe de commande (3) auquel est relié le mécanisme d'actionnement (11), ainsi que des moyens (32) de transformation du mouvement de sortie de l'actionneur (31) en le mouvement dudit organe de commande (3).
- - Système selon la revendication 8, pour la mécanisation de la commande manuelle d'au moins un organe de commande (3) constitué par un levier (3) monté à pivotement par rapport au véhicule ferroviaire (1) autour d'un axe de pivotement, caractérisé par le fait que, pour le ou chaque levier (3), l'actionneur (31) du mécanisme d'actionnement (11) produit en sortie un mouvement de translation et est relié à un ensemble à bras articulés (32) qui est articulé aux moyens de liaison amovible (12) à la partie de préhension du levier (3) et dont les bras (40, 41) sont articulés de manière à transformer un mouvement de translation produit par l'actionneur (31) dans l'un de premier et second sens de translation opposés en un mouvement de pivotement du levier (3) dans l'un respectif de premier et second sens de pivotement opposés.
- - Système selon la revendication 9, dans lequel les moyens de liaison amovible (12) du dispositif d'actionnement (8) au véhicule ferroviaire (1) comprennent un ensemble support (10) tel que défini à l'une des revendications 3 et 4, caractérisé par le fait que sont prévus des moyens (66) pour relier de manière amovible à l'ensemble support (10) les moyens de liaison amovible au levier (12), avec de préférence une ouverture ménagée dans l'un des bras pour former les moyens manuels de transport et de manoeuvre.
- - Système selon l'une des revendications 9 et 10, dans lequel les moyens de liaison amovible du dispositif d'actionnement (8) au véhicule ferroviaire (1) comprennent un ensemble support (10) tel que défini à l'une des revendications 3 et 4, caractérisé par le fait qu'à partir de l'ensemble support (10) s'étendent deux plaques parallèles (34) écartées l'une de l'autre en ménageant entre elles un espace pour le passage de l'ensemble à bras articulés (32), une extrémité de l'actionneur (31) étant montée à pivotement autour d'un axe s'étendant entre les deux plaques (34), dans la région d'extrémité libre de celles-ci, l'autre extrémité de l'actionneur (31) étant côté ensemble support (10) et articulée à une extrémité d'un premier bras (40), lui-même monté à pivotement autour d'un axe s'étendant entre les deux plaques (34) dans la région côté ensemble support (10), l'autre extrémité du premier bras (40) étant reliée à pivotement à une extrémité d'un second bras (41) dont l'autre extrémité est reliée à pivotement au levier (3), par les moyens de liaison amovible (12), les axes de pivotement de l'actionneur (31), du premier bras (40) et du second bras (41) étant parallèles à l'axe de pivotement du levier (3).
- - Système selon la revendication 11, caractérisé par le fait que les deux plaques parallèles (34) s'étendent à partir d'une plaque de base (33) munie de moyens de liaison amovible (35, 36) à l'ensemble support (10) .
- - Système selon l'une des revendications 1 à 12, caractérisé par le fait qu'il comprend en outre un dispositif de commande et d'alimentation en énergie (9) pour commander le dispositif d'actionnement (8) et lui fournir l'énergie nécessaire pour actionner le ou les organes de commande (3), le dispositif de commande et d'alimentation en énergie (9) comprenant des moyens de liaison amovible (54) au véhicule ferroviaire (1) ou au dispositif d'actionnement (8) et, de préférence, également des moyens manuels de transport et de manoeuvre (53).
- - Système selon la revendication 13, caractérisé par le fait que le dispositif de commande et d'alimentation en énergie (9) se présente sous la forme d'un boîtier (52) muni des moyens de liaison amovible au véhicule ferroviaire (1) ou au dispositif d'actionnement (8), ainsi que de moyens manuels de transport et de manoeuvre (53), et dans lequel sont logés :- une partie source d'énergie pour le dispositif d'actionnement (8),- une interface de puissance placée de manière fonctionnelle entre la partie source d'énergie et le dispositif d'actionnement (8),- une partie automatisme destinée à commander l'alimentation en énergie du dispositif d'actionnement (8) par la partie source d'énergie,- des moyens de connexion de la partie automatisme et de la partie source d'énergie au dispositif d'actionnement (8), et- une interface homme-machine et un récepteur radio pour permettre le pilotage de la partie automatisme à l'aide d'une radiocommande.
- - Système selon la revendication 14, caractérisé par le fait que l'ensemble support (10), le cas échéant la pièce formant interface, et/ou le boîtier (52) comprennent des moyens d'accrochage amovible du boîtier (52) à l'ensemble support (10).
- - Système selon l'une des revendications 14 et 15, caractérisé par le fait que le dispositif d'actionnement (8) est hydraulique et la partie source d'énergie comprend une pompe hydraulique et des moyens de raccordement hydraulique au dispositif d'actionnement (8), de façon à former un circuit hydraulique.
- - Système selon l'une des revendications 14 et 15, caractérisé par le fait que le dispositif d'actionnement (8) est électrique et la partie source d'énergie comprend un dispositif de stockage d'énergie électrique et des moyens de production d'énergie électrique par utilisation du déplacement du véhicule ferroviaire (1) le long de la voie, en vue de recharger au moins partiellement le dispositif de stockage d'énergie électrique pendant le déplacement du véhicule ferroviaire (1).
- - Système selon la revendication 17, caractérisé par le fait que les moyens de production d'énergie électrique consistent en un générateur triboélectrique présentant des moyens destinés à frotter contre une roue du véhicule ferroviaire (1) en vue de produire de l'électricité.
- - Système selon l'une des revendications 14 et 15, caractérisé par le fait que le dispositif d'actionnement (8) est électrohydraulique et la partie source d'énergie comprend d'une part un dispositif de stockage d'énergie électrique, des moyens pour charger le dispositif de stockage d'énergie électrique ou des moyens de production d'énergie électrique par utilisation du déplacement du véhicule ferroviaire (1) le long de la voie et, d'autre part, une pompe hydraulique et des moyens de raccordement hydraulique au dispositif d'actionnement (8) de façon à former un circuit hydraulique.
- - Système selon l'une des revendications 14 et 15, caractérisé par le fait que le dispositif d'actionnement (8) est électrohydraulique, dont la commande est électrique mais qui est autonome du point de vue hydraulique, et la partie source d'énergie comprend un dispositif de stockage d'énergie électrique et soit des moyens pour charger le dispositif de stockage d'énergie électrique, soit des moyens de production d'énergie électrique par utilisation du déplacement du véhicule ferroviaire (1) le long de la voie.
- - Système selon l'une des revendications 14 à 20, caractérisé par le fait qu'il comprend en outre un système de caméra de surveillance comportant des moyens de liaison au véhicule ferroviaire lui permettant d'être tourné vers l'équipement mécanique dont le fonctionnement est commandé par le ou les organes de commande (3), et une radiocommande apte à piloter à distance la partie automatisme et à communiquer avec le système de caméra de surveillance, la radiocommande comportant un écran pour l'affichage en temps réel de la vidéo prise par le système de caméra de surveillance.
- - Système selon l'une des revendications 14 à 21, caractérisé par le fait qu'il comprend en outre des capteurs de position reliés à la partie automatisme de façon à lui communiquer en temps réel des mesures de capteur et que la partie automatisme est asservie en utilisant lesdites mesures de capteur.
- - Procédé de commande du fonctionnement d'au moins un équipement mécanique d'un véhicule ferroviaire (1), le fonctionnement du ou de chaque équipement mécanique étant commandé par un organe de commande (3) à commande manuelle, le ou chaque organe de commande (3) étant monté mobile sur le véhicule ferroviaire (1) et comprenant une partie de préhension par laquelle l'organe de commande (3) est actionné, caractérisé par le fait que :- on installe un système de mécanisation tel que défini à l'une des revendications 2 à 22 en reliant de manière amovible le dispositif d'actionnement (8) d'une part au véhicule ferroviaire (1), à l'aide desdits moyens de liaison amovible au véhicule ferroviaire (1), et d'autre part à la partie de préhension du ou des organes de commande (3), à l'aide desdits moyens de liaison amovible (12) à la partie de préhension du ou des organes de commande (3) ;- on commande le dispositif d'actionnement (8) pour actionner le ou chaque organe de commande (3) par déplacement de la partie de préhension du ou de chaque organe de commande (3), et commander ainsi le fonctionnement souhaité dudit ou desdits équipements mécaniques ; et- à la fin du fonctionnement souhaité dudit ou desdits équipements mécaniques, on retire ledit système de mécanisation en le séparant du véhicule ferroviaire (1) et du ou des organes de commande (3).
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1203356A FR2998852B1 (fr) | 2012-12-05 | 2012-12-05 | Outillage amovible pour wagons destines a la depose de ballast sur voies ferrees |
| FR1352441A FR2998851B1 (fr) | 2012-12-05 | 2013-03-19 | Systeme de mecanisation de la commande manuelle d'organe de commande de vehicule ferroviaire |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2740645A1 EP2740645A1 (fr) | 2014-06-11 |
| EP2740645B1 true EP2740645B1 (fr) | 2016-05-11 |
Family
ID=49683629
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13195817.5A Active EP2740645B1 (fr) | 2012-12-05 | 2013-12-05 | Système de mécanisation de la commande manuelle d'organe de commande de véhicule ferroviaire |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP2740645B1 (fr) |
| BE (1) | BE1022496B1 (fr) |
| ES (1) | ES2586067T3 (fr) |
| FR (1) | FR2998851B1 (fr) |
| PL (1) | PL2740645T3 (fr) |
| PT (1) | PT2740645E (fr) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020217149A1 (fr) | 2019-04-24 | 2020-10-29 | Novium | Train de ballast à commande d'ouverture et de fermeture de trappes automatique et à alimentation autonome |
| US11268546B2 (en) | 2018-04-02 | 2022-03-08 | Carrier Corporation | Flush pump and hydraulic system |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106926850B (zh) * | 2017-04-24 | 2018-10-26 | 中车眉山车辆有限公司 | 一种铁路漏斗车用轨道式单扇底门独立控制卸货装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3899980A (en) * | 1974-07-29 | 1975-08-19 | Florig Equipment Company Inc | Hopper closure assembly |
| US5311822A (en) | 1992-12-07 | 1994-05-17 | Herzog Contracting Corporation | Ballast hopper door control apparatus and method with independently and selectively actuated motors in response to uniquely coded signals |
| FR2929219A1 (fr) * | 2008-03-25 | 2009-10-02 | Sncf | Circuit hydraulique pour wagon, en particulier une ballastiere |
-
2013
- 2013-03-19 FR FR1352441A patent/FR2998851B1/fr not_active Expired - Fee Related
- 2013-12-05 PL PL13195817.5T patent/PL2740645T3/pl unknown
- 2013-12-05 EP EP13195817.5A patent/EP2740645B1/fr active Active
- 2013-12-05 ES ES13195817.5T patent/ES2586067T3/es active Active
- 2013-12-05 PT PT131958175T patent/PT2740645E/pt unknown
- 2013-12-05 BE BE2013/0816A patent/BE1022496B1/fr not_active IP Right Cessation
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11268546B2 (en) | 2018-04-02 | 2022-03-08 | Carrier Corporation | Flush pump and hydraulic system |
| WO2020217149A1 (fr) | 2019-04-24 | 2020-10-29 | Novium | Train de ballast à commande d'ouverture et de fermeture de trappes automatique et à alimentation autonome |
| DE212020000604U1 (de) | 2019-04-24 | 2021-11-30 | Novium | Schotterzug mit automatischer Klappenöffnungs- und -schließungssteuerung und autonomer Energieversorgung |
Also Published As
| Publication number | Publication date |
|---|---|
| PL2740645T3 (pl) | 2016-12-30 |
| FR2998851B1 (fr) | 2014-12-05 |
| FR2998851A1 (fr) | 2014-06-06 |
| EP2740645A1 (fr) | 2014-06-11 |
| BE1022496B1 (fr) | 2016-05-12 |
| PT2740645E (pt) | 2016-06-06 |
| ES2586067T3 (es) | 2016-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2740645B1 (fr) | Système de mécanisation de la commande manuelle d'organe de commande de véhicule ferroviaire | |
| CA3044139A1 (fr) | Vehicule aerien sans equipage pour surveiller une ligne electrique | |
| FR2712578A1 (fr) | Dispositif pour la manutention d'un conteneur. | |
| EP3110595A1 (fr) | Unité robotique de transport de charges longues | |
| EP3791844B1 (fr) | Systeme d'automatisation du chargement et de l'extraction d'un chariot sur un recepteur | |
| WO2017216430A1 (fr) | Procede pour manoeuvrer une pale d'eolienne | |
| FR2903395A1 (fr) | Crochet de levage a commande a distance autonome en energie | |
| EP0518750A1 (fr) | Wagon de récupération ou mise à disposition de bogies ferroviaires rail-route ou d'engins similaires à au moins deux roues | |
| FR2692528A1 (fr) | Dispositif de captation d'électricité pour un véhicule tel qu'un trolleybus ou un tramway. | |
| EP0287483B1 (fr) | Dispositif d'assistance au démarrage pour transpalette manuel | |
| FR2840249A1 (fr) | Dispositif compacteur de dechets contenus dans des conteneurs | |
| EP0244323A1 (fr) | Dispositif de levage, notamment pour manutentionner et ouvrir des conteneurs comportant deux coquilles articulées | |
| CA3046506C (fr) | Procede de manoeuvre de portes de soute d'atterrisseur d'aeronef | |
| EP2252493B1 (fr) | Wagon de manutention de charges lourdes, notamment de rails, et utilisation d'un tel wagon en présence d'une caténaire | |
| FR2505681A1 (fr) | Appareil de pulverisation | |
| EP2266826B1 (fr) | Dispositif de couverture automatisé | |
| EP1859213B1 (fr) | Cellule de refrigeration equipee d' un dispositif de fractionnement de son espace interne | |
| FR2921087A1 (fr) | Procede de recouvrement d'une piscine enterree et element d'enroulement d'un rideau flottant pour sa mise en oeuvre | |
| EP3521126B1 (fr) | Système d'aide au dressage et à la dépose d'élément de construction longitudinal et véhicule de manutention d'élément de construction longitudinal équipé d'un tel système | |
| WO2020217149A1 (fr) | Train de ballast à commande d'ouverture et de fermeture de trappes automatique et à alimentation autonome | |
| FR3031967A1 (fr) | Dispositif de maintien et liberation d'un engin teleopere sur une plateforme | |
| EP2843131A1 (fr) | Dispositif de contrôle d'accès, notamment pour véhicules | |
| EP4015313B1 (fr) | Dispositif de maintien et dépose d'un équipement par rapport à une paroi externe d'un véhicule et procédé mettant en oeuvre un tel dispositif | |
| EP3875342A1 (fr) | Procédé d'installation ou de dépose d'un équipement pour exploitation d'une voie ferrée | |
| FR2526743A1 (fr) | Dispositif permettant d'immobiliser ou de faire progresser un wagon sur une voie ferree |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20131205 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| R17P | Request for examination filed (corrected) |
Effective date: 20141211 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20151120 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 798399 Country of ref document: AT Kind code of ref document: T Effective date: 20160515 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: PT Ref legal event code: SC4A Free format text: AVAILABILITY OF NATIONAL TRANSLATION Effective date: 20160525 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602013007404 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2586067 Country of ref document: ES Kind code of ref document: T3 Effective date: 20161011 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160811 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 798399 Country of ref document: AT Kind code of ref document: T Effective date: 20160511 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160812 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602013007404 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20170214 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161205 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161205 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20131205 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160511 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20231208 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PT Payment date: 20231110 Year of fee payment: 11 Ref country code: NL Payment date: 20231218 Year of fee payment: 11 Ref country code: IT Payment date: 20231130 Year of fee payment: 11 Ref country code: FR Payment date: 20231211 Year of fee payment: 11 Ref country code: DE Payment date: 20231218 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20231110 Year of fee payment: 11 Ref country code: BE Payment date: 20231212 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20240104 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20240101 Year of fee payment: 11 |