EP2570377A1 - Changierführungselement, Wickeleinheit und Wickelmaschine - Google Patents
Changierführungselement, Wickeleinheit und Wickelmaschine Download PDFInfo
- Publication number
- EP2570377A1 EP2570377A1 EP12177185A EP12177185A EP2570377A1 EP 2570377 A1 EP2570377 A1 EP 2570377A1 EP 12177185 A EP12177185 A EP 12177185A EP 12177185 A EP12177185 A EP 12177185A EP 2570377 A1 EP2570377 A1 EP 2570377A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- yarn
- section
- traverse guide
- arm body
- traverse
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004804 winding Methods 0.000 title claims description 52
- 239000000919 ceramic Substances 0.000 claims abstract description 13
- 239000000853 adhesive Substances 0.000 claims description 20
- 230000001070 adhesive effect Effects 0.000 claims description 20
- 239000000463 material Substances 0.000 claims description 9
- 239000011347 resin Substances 0.000 claims description 5
- 229920005989 resin Polymers 0.000 claims description 5
- 229910000838 Al alloy Inorganic materials 0.000 claims description 4
- 229910000861 Mg alloy Inorganic materials 0.000 claims description 4
- 230000002093 peripheral effect Effects 0.000 description 7
- 238000005299 abrasion Methods 0.000 description 6
- 238000011144 upstream manufacturing Methods 0.000 description 5
- 230000007547 defect Effects 0.000 description 4
- 239000000835 fiber Substances 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 229920006231 aramid fiber Polymers 0.000 description 2
- -1 berylium Chemical compound 0.000 description 2
- 239000004918 carbon fiber reinforced polymer Substances 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- ICXAPFWGVRTEKV-UHFFFAOYSA-N 2-[4-(1,3-benzoxazol-2-yl)phenyl]-1,3-benzoxazole Chemical compound C1=CC=C2OC(C3=CC=C(C=C3)C=3OC4=CC=CC=C4N=3)=NC2=C1 ICXAPFWGVRTEKV-UHFFFAOYSA-N 0.000 description 1
- ZOXJGFHDIHLPTG-UHFFFAOYSA-N Boron Chemical compound [B] ZOXJGFHDIHLPTG-UHFFFAOYSA-N 0.000 description 1
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- 229920000049 Carbon (fiber) Polymers 0.000 description 1
- 229920002430 Fibre-reinforced plastic Polymers 0.000 description 1
- FYYHWMGAXLPEAU-UHFFFAOYSA-N Magnesium Chemical compound [Mg] FYYHWMGAXLPEAU-UHFFFAOYSA-N 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 239000004699 Ultra-high molecular weight polyethylene Substances 0.000 description 1
- 238000010042 air jet spinning Methods 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 229910052796 boron Inorganic materials 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 239000004917 carbon fiber Substances 0.000 description 1
- 239000011365 complex material Substances 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000011151 fibre-reinforced plastic Substances 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 239000003365 glass fiber Substances 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 239000012784 inorganic fiber Substances 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 229910052749 magnesium Inorganic materials 0.000 description 1
- 239000011777 magnesium Substances 0.000 description 1
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000007383 open-end spinning Methods 0.000 description 1
- 238000009987 spinning Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 229920000785 ultra high molecular weight polyethylene Polymers 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H57/00—Guides for filamentary materials; Supports therefor
- B65H57/006—Traversing guides
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H54/00—Winding, coiling, or depositing filamentary material
- B65H54/02—Winding and traversing material on to reels, bobbins, tubes, or like package cores or formers
- B65H54/28—Traversing devices; Package-shaping arrangements
- B65H54/2827—Traversing devices with a pivotally mounted guide arm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H57/00—Guides for filamentary materials; Supports therefor
- B65H57/24—Guides for filamentary materials; Supports therefor with wear-resistant surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/30—Handled filamentary material
- B65H2701/31—Textiles threads or artificial strands of filaments
Definitions
- the present invention relates to a traverse guide adapted to traverse a yarn.
- a traverse guide including an arm section and a yarn hooking section.
- the arm section is an elongate member.
- the yarn hooking section is connected to a tip-end of the arm section.
- the yarn hooking section is provided with a groove or the like adapted to hook and hold the yarn.
- the traverse guide can traverse the yarn with respect to a package by reciprocating the arm section with a motor or the like with the yarn hooking section holding the yarn.
- Japanese Unexamined Patent Publication No. 2010-137944 discloses this type of traverse guide.
- the traverse guide disclosed in Japanese Unexamined Patent Publication No. 2010-137944 includes an arm section configured by two plate materials, and a hook-like yarn hooking section.
- the two plate materials configuring the arm section are arranged to face each other with a gap.
- Japanese Unexamined Patent Publication No. 2010-137944 discloses a CFRP (Carbon Fiber Reinforced Plastics), a complex material including inorganic fiber (glass fiber, ceramic fiber, or the like) and/or organic fiber (aramid fiber, PBO (Poly-p-phenylenebenzobisoxazole) fiber, ultrahigh molecular weight polyethylene, or the like), an alloy including a light weight metal (magnesium, berylium, aluminum, titanium, or the like), and the like for the material of the arm section.
- CFRP Carbon Fiber Reinforced Plastics
- aramid fiber Poly-p-phenylenebenzobisoxazole
- PBO Poly-p-phenylenebenzobisoxazole
- WO 1999/047739 describes providing in a traverse arm including a fork-shaped yarn guide, an abrasion resistant member on both sides of a slit of the yarn guide. However, how the abrasion resistant member is attached to the yarn guide is not described.
- the yarn hooking section is abraded by making contact with the yarn. Therefore, the yarn hooking section is preferably configured by a member having abrasion resistance such as ceramics.
- the ceramics has a relatively heavy weight, and thus a load is applied on the motor adapted to drive the arm section. Since the yarn hooking section is connected to one end of the arm section, when reciprocatingly swinging the arm section with the other end of the arm section as a swing shaft, for example, inertia becomes large and the load applied on the motor increases.
- a member having the abrasion resistance such as ceramics generally has high hardness, and thus has low toughness and tends to easily break.
- the traverse guide is provided to traverse the yarn continuously at high speed, and hence improvement in durability is demanded.
- An object of the present invention is to provide a traverse guide in which durability of a yarn hooking section (yarn guiding section) is improved while a load on a motor adapted to drive the arm-like traverse guide is reduced.
- a traverse guide includes an arm body and a yarn guiding section.
- the arm body includes a frame body on which a mounting groove is formed.
- the mounting groove is arranged on a first end among ends in a longitudinal direction of the arm body and opened in a direction towards a second end, the second end being an opposite end with respect to the first end in the longitudinal direction.
- the yarn guiding section is made of ceramics.
- the yarn guiding section is arranged on a groove wall of the frame body.
- a yarn hooking groove is formed in the yarn guiding section and is opened in a direction towards the second end.
- the traverse guide excels in abrasion resistance. Since the frame body of the arm body is arranged to cover the yarn guiding section, the yarn guiding section can be reliably held and durability is improved.
- the arm body and the yarn guiding section are preferably adhered by adhesive. Since a fixing hole and the like for fixing the yarn guiding section to the arm body is not required to be formed, a manufacturing cost of the traverse guide can be suppressed.
- the arm body and the yarn guiding section are preferably adhered by the adhesive such that the adhesive covers a boundary between the mounting groove and the yarn guiding section. Even if a step is formed at the boundary between the mounting groove and the yarn guiding section, the yarn can be prevented from getting caught at the step during catching of the yarn by the traverse guide and the like. Therefore, occurrence of yarn breakage and the like can be prevented.
- a positioning section adapted to position the yarn guiding section with respect to the arm body is preferably formed on the arm body. Accordingly, since position accuracy (mounting accuracy) of the yarn guiding section can be improved, the step formed at the boundary between the mounting groove and the yarn guiding section can be made small.
- the positioning section is preferably formed such that the yarn guiding section is inserted into the mounting groove from one side in a thickness direction of the arm body. Accordingly, since a position of the yarn guiding section can be easily determined, an operator can promptly carry out a mounting operation.
- the yarn hooking groove is formed in an elongate shape with one end opened.
- a longitudinal direction of the elongate yarn hooking groove coincides with a longitudinal direction of the arm body. Since a length of the yarn hooking groove can be made relatively long, the yarn is less likely to be displaced from the yarn hooking groove while being traversed.
- a material of the arm body preferably includes at least one of magnesium alloy, aluminum alloy, and resin. Since the magnesium alloy, the aluminum alloy, and the resin are generally lighter than the ceramics, as compared to a case where the entire traverse guide (or the entire frame body) is made of ceramics, the traverse guide can be made lightweight. Therefore, the load of the motor adapted to drive the traverse guide, for example, can be suppressed.
- a guide surface adapted to guide the yarn to the yarn hooking groove is preferably formed on each of the arm body and the yarn guiding section. Since the guide surface is formed on both the arm body and the yarn guiding section, the yarn can be guided to proximity of the yarn hooking groove during the catching of the yarn by the traverse guide. Therefore, the traverse guide can reliably catch the yarn.
- a winding unit includes the traverse guide, a traverse guide driving section, and a cradle.
- the traverse guide is adapted to traverse the yarn while hooking the yarn with the yarn hooking groove.
- the traverse guide driving section is adapted to drive the traverse guide.
- the cradle is adapted to hold a package formed by the yarn being traversed by the traverse guide.
- the winding unit can traverse the yarn at high speed by the traverse guide. As a result, production efficiency of the winding unit can be improved.
- a yarn winding machine includes a plurality of winding units.
- the package can be efficiently formed by the plurality of winding units .
- Embodiments of the invention will be hereinafter described.
- Upstream and downstream respectively refer to upstream and downstream in a travelling direction of a yarn at the time of yarn winding.
- the yarn supplying section 16 side is the upstream and the winding section 17 side is the downstream.
- the automatic winder (yarn winding machine) 1 includes a plurality of winder units (winding units) 10 arranged in line, an automatic doffing device 8, and a machine control device 90.
- Each winder unit 10 is configured to wind the yarn 20 unwound from the yarn supplying bobbin 21 around a winding bobbin 22 while traversing the yarn 20 to form a package 30.
- the automatic doffing device 8 travels to a position of the relevant winder unit 10 to collect the fully-wound package 30 and supply a winding bobbin (empty winding bobbin) 22 around which the yarn 20 is not wound.
- the automatic doffing device 8 may only collect the fully-wound package 30 and may not supply the empty winding bobbin 22.
- the automatic doffing device 8 may not collect the fully-wound package 30 and may only supply the empty winding bobbin 22.
- the machine control device 90 includes an operation section 91 and a display section 92.
- An operator may input a predetermined set value or select an appropriate control method by operating the operation section 91. The setting is thereby made on each winder unit 10.
- the display section 92 may display winding status of the yarn 20 in each winder unit 10, content of trouble that occurred, and the like.
- Each winder unit 10 includes a winding unit main body 11 and a unit control section 50.
- the unit control section 50 includes, for example, a Central Processing Unit (CPU), and a Read Only Memory (ROM).
- the ROM stores a program for controlling each component of the winding unit main body 11.
- the CPU executes the program stored in the ROM.
- the winding unit main body 11 includes a yarn supplying section 16, a yarn-unwinding assisting device 12, a tension applying device 13, a splicer device 14, a clearer (yarn quality measuring device) 15, and the winding section 17 arranged in this order from the yarn supplying bobbin 21 along a yarn travelling path between the yarn supplying bobbin 21 and the winding bobbin (winding tube, paper tube, core tube) 22.
- the yarn supplying section 16 is arranged at a lower part of the winding unit main body 11.
- the yarn supplying section 16 can hold the yarn supplying bobbin 21 supplied by a bobbin transportation system or a magazine type bobbin supplying device (not illustrated) at a prescribed position.
- the yarn-unwinding assisting device 12 causes a regulation member 40 to make contact with a balloon formed at an upper part of the yarn supplying bobbin 21 when the yarn 20 unwound from the yarn supplying bobbin 21 is swung around, and controls the balloon to an appropriate size to assist the unwinding of the yarn 20.
- the tension applying device 13 applies a predetermined tension on the travelling yarn 20.
- the tension applying device 13 may be a gate-type in which movable comb teeth 37 are arranged with respect to fixed comb teeth 36.
- the movable comb teeth 37 are swung by a rotary solenoid 38 or the like, so as to be in a meshed state or a released state with respect to the fixed comb teeth 36.
- a disc-type tension applying device for example, may be adopted instead of the gate-type tension applying device 13 described above.
- the splicer device 14 joins a lower yarn from the yarn supplying bobbin 21 and an upper yarn from the package 30 after a yarn cut when the clearer 15 detects a yarn defect and cuts the yarn 20 with a cutter 39, or after a yarn breakage while unwinding the yarn 20 from the yarn supplying bobbin 21.
- a yarn joining device adapted to join the upper yarn and the lower yarn may be a mechanical type or a type that uses fluid such as compressed air.
- the clearer 15 includes a clearer head 49 provided with a sensor (not illustrated) for detecting a thickness of the yarn 20, and an analyzer 53 for processing a yarn thickness signal from the sensor.
- the clearer 15 detects a yarn defect such as slub by monitoring the yarn thickness signal from the sensor.
- the cutter 39 is provided in proximity to the clearer head 49, and immediately cuts the yarn 20 when the clearer 15 detects the yarn defect.
- the analyzer 53 may be arranged in the unit control section 50.
- the clearer 15 may be adapted to detect foreign substances contained in the yarn 20 as the yarn defect.
- a lower yarn guiding pipe 25 for catching the lower yarn from the yarn supplying bobbin 21 and guiding the lower yarn to the splicer device 14 is arranged below the splicer device 14.
- An upper yarn guiding pipe 26 for catching the upper yarn from the package 30 and guiding the upper yarn to the splicer device 14 is arranged above the splicer device 14.
- the lower yarn guiding pipe 25 and the upper yarn guiding pipe 26 can respectively swing with shafts 33 and 35 as a center.
- a suction port 32 is formed at a tip-end of the lower yarn guiding pipe 25.
- a suction mouth 34 is arranged at a tip-end of the upper yarn guiding pipe 26.
- An appropriate negative pressure source (not illustrated) is connected to the lower yarn guiding pipe 25 and the upper yarn guiding pipe 26.
- the lower yarn guiding pipe 25 and the upper yarn guiding pipe 26 can generate a suction flow at the suction port 32 and the suction mouth 34 to suck and catch yarn ends of the upper yarn and the lower yarn.
- the winding section 17 includes a cradle 23, a traverse device 27, and a contact roller 29.
- the cradle 23 removably holds the winding bobbin 22.
- the cradle 23 can swing towards a front side and a back side of the winder unit 10, and can absorb an increase in a yarn layer diameter of the package 30 accompanying the winding of the yarn 20 around the winding bobbin 22.
- a surface of the package 30 can be appropriately made in contact with a surface of the contact roller 29.
- a package driving motor (winding tube driving section) 41 such as a servo motor is provided on the cradle 23.
- the winding section 17 rotatably drives the winding bobbin 22 with the package driving motor 41 to wind the yarn 20 around the surface of the winding bobbin 22 (or the surface of package 30).
- An operation of the package driving motor 41 is controlled by the unit control section 50.
- a package-driving-motor control section may be provided independently from the unit control section 50, and the operation of the package driving motor 41 may be controlled by the package-driving-motor control section.
- the contact roller 29 is arranged to make contact with a peripheral surface of the winding bobbin 22 or a peripheral surface of the package 30.
- the contact roller 29 is rotated accompanying the rotation of the winding bobbin 22 or the package 30.
- the traverse device 27 is an arm-type traverse device, and traverses the yarn 20 with respect to the surface of the package 30.
- the winding section 17 is adapted to wind the yarn 20 into the package 30 while traversing the yarn 20 by the traverse device 27.
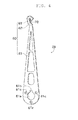
- the traverse device 27 includes a traverse guide 28, a traverse guide driving motor (traverse guide driving section) 45, and a guide plate 52.
- the traverse guide 28 is an elongate member adapted to swing about a supporting axis.
- a yarn hooking groove 70a (see FIG. 5A and the like, to be described later) is formed at a first end (side close to the yarn 20, tip-end side) of the traverse guide 28 so that the yarn 20 can be hooked.
- a second end (basal end side) of the traverse guide 28 is fixed to a drive shaft 45a of the traverse guide drive motor 45 while being reinforced by a boss portion 46.
- the traverse guide driving motor 45 is configured by a servo motor, for example, and is provided to drive the traverse guide 28.
- the traverse guide driving motor 45 may be configured by other appropriate motors such as a brushless DC motor, a stepping motor, a voice coil motor, or the like. The detailed shape and the structure of the traverse guide 28 will be described later.
- the traverse device 27 drives the traverse guide driving motor 45 to reciprocate the traverse guide 28 with the yarn 20 hooked at the first end (the yarn hooking groove 70a) of the traverse guide 28.
- the traverse device 27 thus reciprocates the first end of the traverse guide 28 in a winding width direction of the package 30 to traverse the yarn 20 with respect to the surface of the package 30.
- the winder unit 10 thus winds the yarn 20 around the winding bobbin 22 while traversing the yarn 20 at a predetermined speed to a prescribed winding width, and forms a yarn layer formed on an outer peripheral surface of the winding bobbin 22 at a desired density.
- An operation of the traverse guide driving motor 45 is controlled by the unit control section 50.
- a dedicated traverse control section may be provided, and the traverse guide driving motor 45 may be controlled by this traverse control section.
- the guide plate 52 is arranged upstream of the traverse guide 28. The guide plate 52 bends a yarn path of the yarn 20 located upstream of the guide plate 52 towards the contact roller 29 to guide the yarn 20 such that the yarn 20 can be caught by the traverse guide 28.
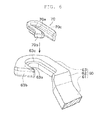
- the traverse guide 28 includes an arm body 60, and a yarn guiding piece (yarn guiding section) 70.
- the arm body 60 is an elongate plate-like member made with a light weight metal such as magnesium alloy or aluminum alloy, or a high strength resin.
- the arm body 60 includes an arm section 61, a bent section 62, and a hooking section (frame body) 63.
- the arm section 61 occupies a majority of the arm body 60.
- the arm section 61 has a plurality of holes formed at a central part, and a shaft hole 61a, a key groove 61b, and fixing holes 61c formed at the second end.
- the hole formed in the arm section 61 may be one or may be omitted.
- the shaft hole 61a is formed as a circular hole.
- the drive shaft 45a of the traverse guide driving motor 45 is inserted to the shaft hole 61a.
- the key groove 61b is formed as a groove having a rectangular cross-sectional contour, and is a groove adapted to couple with the drive shaft 45a.
- Three fixing holes 61c are formed to surround the shaft hole 61a.
- the fixing holes 61c are holes for fixing the boss portion 46. Screw holes are formed on the boss portion 46 so as to correspond with a position of the fixing holes 61c.
- the boss portion 46 can be fixed to the traverse guide 28 by aligning the screw holes and the fixing holes 61c and tightening with bolts or the like.
- the number of fixing holes 61c is not particularly limited.
- the bent section 62 is formed between the arm section 61 and the hooking section 63.
- the bent section 62 is bent in a direction in which the hooking section 63 approaches the contact roller 29. Since a free length (length of the yarn 20 from the traverse guide 28 until making contact with the contact roller 29) can be reduced, a behavior of the yarn 20 can be stabilized. Therefore, the winder unit 10 can form a high quality package 30.
- the hooking section 63 is a section constituting the first end of the arm body 60, and is formed in a frame shape and a hook shape.
- the hooking section 63 is formed with a mounting groove 63a, a guide surface 63b, and a positioning section 63c.
- the mounting groove 63a is formed to be elongate in a longitudinal direction of the arm body 60 when seen in the thickness direction of the arm body 60 (see FIG. 5A ).
- the mounting groove 63a is formed to open the end on one side of the long hole (direction towards the second end of the arm body 60).
- the yarn guiding piece 70 is attached to an inner side of the mounting groove 63a.
- the hooking section 63 holds the yarn guiding piece 70 so as to surround the yarn guiding piece 70.
- the guide surface 63b is a surface formed diagonally from an outer side to an inner side of the hooking section 63 (opening section of the mounting groove 63a).
- the guide surface 63b guides the yarn 20 to the yarn hooking groove 70a during the catching of the yarn 20 by the traverse guide 28.
- the positioning section 63c is used to determine the position when mounting the yarn guiding piece 70 to the arm body 60.
- the positioning section 63c is the step-like section formed on a wall surface constituting the mounting groove 63a.
- the yarn guiding piece 70 is mounted on a groove wall of the hooking section 63 (inner side of the mounting groove 63a).
- the yarn guiding piece 70 is made with ceramics.
- the yarn hooking groove 70a, a guide surface 70b, and a step-like section 70c are formed in the yarn guiding piece 70.
- the yarn hooking groove 70a has a same shape as the mounting groove 63a.
- the yarn hooking groove 70a is a groove formed to open an end on one side (direction towards the second end of the arm body 60) of the long hole (elongate shape).
- the yarn hooking groove 70a is formed such that a longitudinal direction of the yarn hooking groove 70a coincides with the longitudinal direction of the arm body 60. After the yarn 20 is caught by the traverse guide 28, the yarn 20 is located inside the yarn hooking groove 70a. When the wall surface of the yarn hooking groove 70a pushes the yarn 20 accompanying the reciprocating movement of the traverse guide 28, the yarn 20 is traversed with respect to the package 30.
- the yarn hooking groove 70a of the present embodiment is formed to be closed in a direction towards the first end of the arm body 60 and opened in a direction towards the second end. Even if a force in the direction towards the first end acts on the yarn 20, the yarn 20 is not displaced from the yarn hooking groove 70a.
- the guide surface 70b is formed to linearly continue to the guide surface 63b of the arm body 60.
- the yarn 20 is guided to the yarn hooking groove 70a via the guide surface 63b and the guide surface 70b. Since the yarn 20 can be guided to the proximity of the yarn hooking groove 70a by forming the guide surface 70b, the traverse guide 28 can reliably catch the yarn 20.
- the step-like section 70c is used for positioning when mounting the yarn guiding piece 70 to the arm body 60.
- the step-like section 70c is formed on an outer peripheral surface of the yarn guiding piece 70.
- the step-like section 70c is formed in a shape that corresponds with the positioning section 63c.
- the position of the yarn guiding piece 70 can be determined by aligning the step-like section 70c and the positioning section 63c.
- Substantially the entire outer peripheral surface of the yarn guiding piece 70 is covered by the hooking section 63 of the arm body 60.
- the arm body 60 can reliably hold the yarn guiding piece 70.
- the yarn guiding piece 70 is mounted on the arm body 60 by an adhesive. Specifically, the operator applies the adhesive on at least one of the wall surface constituting the mounting groove 63a and the outer peripheral surface of the yarn guiding piece 70. In this case, the operator adjusts an application amount of the adhesive so that the adhesive is slightly squeezed out from the boundary between the arm body 60 and the yarn guiding piece 70 when adhering.
- the operator then inserts the yarn guiding piece 70 to the mounting groove 63a from one side in the thickness direction of the arm body 60 (see FIG. 6 ). Accordingly, the position of the yarn guiding piece 70 is determined at an area where the positioning section 63c and the step-like section 70c make contact, and the arm body 60 and the yarn guiding piece 70 can be adhered to one another.
- a step may be formed at the boundary between the arm body 60 and the yarn guiding piece 70.
- the yarn 20 may get caught at such a step and a yarn breakage may occur.
- the step that becomes a cause of yarn breakage may be a step formed at a boundary between the guide surface 63b and the guide surface 70b (see reference symbol A in FIG. 5A ), or may be a step formed at a boundary between a basal end of the yarn guiding piece 70 and the arm body 60 (see reference symbol B in FIG. 5A ).
- the adhesive is applied to a degree in which the adhesive is slightly squeezed out from the boundary between the arm body 60 and the yarn guiding piece 70.
- the step may be made smooth, or a gradual protrusion that covers the step can be formed (see FIG. 5B ).
- the adhesive is illustrated to be protruding at two specific areas, but the adhesive may be applied to cover other boundary.
- the traverse guide 28 of the present embodiment includes the arm body 60 and the yarn guiding piece 70.
- the arm body 60 includes the hooking section 63 on which the mounting groove 63a is formed.
- the mounting groove 63a is located at the first end of the arm body 60 and is opened in the direction towards the second end.
- the yarn guiding piece 70 is made of ceramics and is arranged on the groove wall of the hooking section 63.
- the yarn guiding piece 70 is formed with the yarn hooking groove 70a opened in the direction towards the second end of the arm body 60.
- the traverse guide 28 excels in abrasion resistance since the portion that makes contact with the yarn 20 is made of ceramics. Since the hooking section 63 is arranged to cover the yarn guiding piece 70, the yarn guiding piece 70 can be reliably held and durability is improved.
- the arm body 60 and the yarn guiding piece 70 are adhered by the adhesive. Since a fixing hole or the like for fixing the yarn guiding piece 70 to the arm body 60 is not required to be formed, a manufacturing cost of the traverse guide 28 can be suppressed.
- the arm body 60 and the yarn guiding piece 70 are adhered by the adhesive such that the adhesive covers the boundary between the mounting groove 63a and the yarn guiding piece 70. Even if a step is formed at the boundary between the mounting groove 63a and the yarn guiding piece 70, the yarn 20 can be prevented from getting caught at the step during the catching of the yarn 20 by the traverse guide 28 and the like. Therefore, occurrence of yarn breakage and the like can be prevented.
- the positioning section 63c adapted to position the yarn guiding piece 70 with respect to the arm body 60 is formed on the arm body 60. Since the positioning accuracy of the yarn guiding piece 70 can be improved, the step formed at the boundary between the mounting groove 63a and the yarn guiding piece 70 can be reduced.
- the positioning section 63c is formed so that the yarn guiding piece 70 can be inserted to the mounting groove 63a from one side in the thickness direction of the arm body 60. Since the position of the yarn guiding piece 70 can be easily determined, the operator can promptly carry out a mounting operation.
- the yarn hooking groove 70a is formed in a long hole shape (elongate shape) with a basal end side opened.
- a longitudinal direction of the long hole coincides with a longitudinal direction of the arm body 60. Since the length of the yarn hooking groove 70a thus can be made relatively long, the yarn 20 is less likely to be displaced from the yarn hooking groove 70a while being traversed.
- the arm body 60 and the yarn guiding piece 70 respectively includes the guide surfaces 63b and 70b adapted to guide the yarn 20 to the yarn hooking groove 70a. Since the guide surface is formed on both the arm body 60 and the yarn guiding piece 70, the yarn 20 can be guided to the proximity of the yarn hooking groove 70a during the catching of the yarn 20 by the traverse guide 28. Therefore, the traverse guide 28 can reliably catch the yarn 20.
- the material of the arm body 60 is preferably a light weight metal or a resin, as described in the above embodiment, but may be other materials such as the material disclosed in Japanese Unexamined Patent Publication No. 2010-137944 .
- the other materials of the arm body 60 include, for example, a carbon composite material, specifically, fiber-reinforced plastic including carbon fiber, boron fiber, and aramid fiber or the like.
- the first end of the arm body 60 may not be formed in a hook shape as long as the first end has a frame shape and is provided with the mounting groove.
- the yarn guiding piece 70 is not limited to the shape described in the above embodiment.
- the guide surface 70b may not be provided.
- the positioning section 63c and the step-like section 70c are formed in a step-form, but may have a configuration other than the step-form.
- the projection projecting to an inner side from the mounting groove 63a may be formed, and a recess having a shape corresponding to such a projection may be formed on the outer peripheral surface of the yarn guiding piece 70.
- a mounting method of the yarn guiding piece 70 with respect to the arm body 60 is not limited to the adhesive, and for example, a bolt or the like may be used.
- the package formed by the winder unit 10 may be a winding package of which an end surface is tapered or a cheese-shaped package.
- the traverse device 27 is not limited to a configuration of reciprocating the traverse guide 28 within a substantially horizontal plane with respect to an installation surface of the winder unit 10.
- a configuration may be adopted in which the longitudinal direction of the traverse arm is substantially perpendicular to the installation surface of the winder unit.
- the package driving motor 41 is not limited to a servo motor, and may be various types of motors such as a step motor or an induction motor.
- the contact roller 29 may be driven with an appropriate driving device and the package 30 may be rotated accompanying the rotation of the contact roller 29.
- the yarn winding machine is not limited to the automatic winder, and can be applied to other yarn winding machines such as a re-winding machine, a fine spinning machine (e.g., an air-jet spinning machine, an open-end spinning machine), and the like.
Landscapes
- Guides For Winding Or Rewinding, Or Guides For Filamentary Materials (AREA)
- Winding Filamentary Materials (AREA)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011201970A JP2013063807A (ja) | 2011-09-15 | 2011-09-15 | トラバースガイド、巻取ユニット、及び糸巻取機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2570377A1 true EP2570377A1 (de) | 2013-03-20 |
| EP2570377B1 EP2570377B1 (de) | 2015-03-18 |
Family
ID=46545281
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20120177185 Active EP2570377B1 (de) | 2011-09-15 | 2012-07-19 | Changierführungselement, Wickeleinheit und Wickelmaschine |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP2570377B1 (de) |
| JP (1) | JP2013063807A (de) |
| CN (2) | CN102992104B (de) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2982631A1 (de) * | 2014-08-07 | 2016-02-10 | Murata Machinery, Ltd. | Changierarm und garnwickelmaschine |
| WO2019067854A1 (en) * | 2017-09-29 | 2019-04-04 | Shaw Industries Group, Inc. | PROTECTIVE INSERTS AND THEIR SYSTEMS AND METHODS OF USE |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013063807A (ja) * | 2011-09-15 | 2013-04-11 | Murata Machinery Ltd | トラバースガイド、巻取ユニット、及び糸巻取機 |
| JP2015174764A (ja) * | 2014-03-18 | 2015-10-05 | 村田機械株式会社 | 撚掛ノズル、糸継ノズル構造体、糸継装置、巻取ユニット及び繊維機械 |
| JP2017088301A (ja) | 2015-11-09 | 2017-05-25 | 村田機械株式会社 | トラバースガイド、糸巻取機、及びトラバースガイドの製造方法 |
| AU2017100428A4 (en) * | 2016-05-04 | 2017-05-18 | Warn Industries, Inc. | A composite fairlead with a wear plate |
| CN109081175A (zh) * | 2018-09-04 | 2018-12-25 | 青岛宏大纺织机械有限责任公司 | 一种摆杆导纱的自动络筒机及其控制方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3130938A (en) * | 1963-05-13 | 1964-04-28 | Fiber Industries Inc | Thread guide |
| US3502282A (en) * | 1966-11-03 | 1970-03-24 | Rieter Ag Maschf | Traverse yarn guide |
| US4033520A (en) * | 1975-07-28 | 1977-07-05 | Celanese Corporation | Noise reducing textile traverse rod |
| WO1999047739A1 (de) | 1998-03-19 | 1999-09-23 | Textilma Ag | Elektrischer schwenkmotor insbesondere für eine textilmaschine |
| EP1712505A2 (de) * | 2005-04-15 | 2006-10-18 | Murata Kikai Kabushiki Kaisha | Fadenchangiervorrichtung |
| FR2888226A1 (fr) * | 2005-07-11 | 2007-01-12 | Rieter Textile Machinery Fr | Dispositif de va-et-vient a bras oscillant |
| WO2009031163A1 (en) * | 2007-09-07 | 2009-03-12 | Lohia Starlinger Limited | Device for introducing yarn to the grasping device of an automatic turret type winder |
| JP2010137944A (ja) | 2008-12-10 | 2010-06-24 | Murata Machinery Ltd | トラバースアーム及びこのトラバースアームを備える糸巻取機 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102005025698A1 (de) * | 2005-06-04 | 2006-12-07 | Saurer Gmbh & Co. Kg | Fadenchangiervorrichtung für eine Spuleinrichtung einer Kreuzspulen herstellenden Textilmaschine |
| DE102009009971B4 (de) * | 2009-02-21 | 2017-03-16 | Saurer Germany Gmbh & Co. Kg | Verfahren und Vorrichtung zum Betreiben einer Arbeitsstelle einer Kreuzspulen herstellenden Textilmaschine sowie Arbeitsstelle zur Durchführung des Verfahrens |
| JP2013063807A (ja) * | 2011-09-15 | 2013-04-11 | Murata Machinery Ltd | トラバースガイド、巻取ユニット、及び糸巻取機 |
-
2011
- 2011-09-15 JP JP2011201970A patent/JP2013063807A/ja not_active Withdrawn
-
2012
- 2012-05-22 CN CN201210163620.8A patent/CN102992104B/zh active Active
- 2012-05-22 CN CN 201220237188 patent/CN202625497U/zh not_active Expired - Fee Related
- 2012-07-19 EP EP20120177185 patent/EP2570377B1/de active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3130938A (en) * | 1963-05-13 | 1964-04-28 | Fiber Industries Inc | Thread guide |
| US3502282A (en) * | 1966-11-03 | 1970-03-24 | Rieter Ag Maschf | Traverse yarn guide |
| US4033520A (en) * | 1975-07-28 | 1977-07-05 | Celanese Corporation | Noise reducing textile traverse rod |
| WO1999047739A1 (de) | 1998-03-19 | 1999-09-23 | Textilma Ag | Elektrischer schwenkmotor insbesondere für eine textilmaschine |
| EP1712505A2 (de) * | 2005-04-15 | 2006-10-18 | Murata Kikai Kabushiki Kaisha | Fadenchangiervorrichtung |
| FR2888226A1 (fr) * | 2005-07-11 | 2007-01-12 | Rieter Textile Machinery Fr | Dispositif de va-et-vient a bras oscillant |
| WO2009031163A1 (en) * | 2007-09-07 | 2009-03-12 | Lohia Starlinger Limited | Device for introducing yarn to the grasping device of an automatic turret type winder |
| JP2010137944A (ja) | 2008-12-10 | 2010-06-24 | Murata Machinery Ltd | トラバースアーム及びこのトラバースアームを備える糸巻取機 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2982631A1 (de) * | 2014-08-07 | 2016-02-10 | Murata Machinery, Ltd. | Changierarm und garnwickelmaschine |
| WO2019067854A1 (en) * | 2017-09-29 | 2019-04-04 | Shaw Industries Group, Inc. | PROTECTIVE INSERTS AND THEIR SYSTEMS AND METHODS OF USE |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102992104A (zh) | 2013-03-27 |
| CN102992104B (zh) | 2018-11-06 |
| JP2013063807A (ja) | 2013-04-11 |
| EP2570377B1 (de) | 2015-03-18 |
| CN202625497U (zh) | 2012-12-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2570377B1 (de) | Changierführungselement, Wickeleinheit und Wickelmaschine | |
| EP2479129B1 (de) | Garnwicklungsmaschine | |
| EP2511216B2 (de) | Garnwickelvorrichtung und Garnentnahmeverfahren | |
| EP2284300B1 (de) | Spinnmaschine und Garnentfernungsverfahren zum Entfernen von verbleibendem Garn auf der Garnzusammentragungsrolle | |
| EP2479130B1 (de) | Garnwicklungsvorrichtung | |
| US20080283655A1 (en) | Method and device for operating a winding device of a textile machine producing cross-wound bobbins | |
| EP2626323B1 (de) | Garnwickelvorrichtung mit einer Garnansammlungsvorrichtung | |
| EP2530039B1 (de) | Garnwicklungsvorrichtung | |
| EP2366651B1 (de) | Garnwicklungsvorrichtung | |
| EP2573235A2 (de) | Spinnmaschine | |
| EP2570376B1 (de) | Wiege, Wickeleinheit und Garnwickelmaschine | |
| EP2196423B1 (de) | Changierarm und Garnwickelmaschine damit | |
| EP2960196B1 (de) | Garnwicklungsmaschine | |
| CN109081175A (zh) | 一种摆杆导纱的自动络筒机及其控制方法 | |
| EP2749517A1 (de) | Spinnmaschine | |
| JP2013063838A (ja) | 糸巻取機 | |
| JP2014094786A (ja) | 綾振装置およびこれを備えた巻取装置 | |
| EP3042872A1 (de) | Garnwickelmaschine, spule und verfahren zur herstellung einer spule | |
| JP5930301B2 (ja) | フィンガ状ヤーンガイド | |
| CN111132918B (zh) | 纱线卷取机 | |
| EP4197949A1 (de) | Garnwickelmaschine | |
| JP2013063837A (ja) | 巻取ユニット及び糸巻取機 | |
| JP2017081654A (ja) | 糸巻取装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20121228 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17Q | First examination report despatched |
Effective date: 20131219 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20141015 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 716412 Country of ref document: AT Kind code of ref document: T Effective date: 20150415 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602012005926 Country of ref document: DE Effective date: 20150430 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20150318 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20150318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150618 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 716412 Country of ref document: AT Kind code of ref document: T Effective date: 20150318 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150619 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150720 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150718 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602012005926 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| 26N | No opposition filed |
Effective date: 20151221 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150719 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150731 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150731 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20160331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150719 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20160719 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160719 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20120719 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150318 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20190719 Year of fee payment: 8 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602012005926 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210202 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20240619 Year of fee payment: 13 |