EP2177320A1 - Irreversible Kniehebelantriebsvorrichtung - Google Patents
Irreversible Kniehebelantriebsvorrichtung Download PDFInfo
- Publication number
- EP2177320A1 EP2177320A1 EP08018026A EP08018026A EP2177320A1 EP 2177320 A1 EP2177320 A1 EP 2177320A1 EP 08018026 A EP08018026 A EP 08018026A EP 08018026 A EP08018026 A EP 08018026A EP 2177320 A1 EP2177320 A1 EP 2177320A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- toggle
- work arm
- guide surface
- drive device
- crank
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B5/00—Clamps
- B25B5/06—Arrangements for positively actuating jaws
- B25B5/12—Arrangements for positively actuating jaws using toggle links
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B5/00—Clamps
- B25B5/06—Arrangements for positively actuating jaws
- B25B5/12—Arrangements for positively actuating jaws using toggle links
- B25B5/122—Arrangements for positively actuating jaws using toggle links with fluid drive
Definitions
- the present invention concerns a toggle-lever drive device having a rocking work arm, for example in the form of a clamping device for clamping work pieces or a laser welding device for work pieces of sheet metal or a stamping press device for imprinting reference numbers on sheet metal.
- toggle-lever drive devices which comprise a rocking work arm, operatively connected to a linear actuator by means of a toggle-lever mechanism.
- the drive devices of this type which can be configured for various uses, for example as clamping devices for clamping work pieces or spot welding devices for work pieces of sheet metal, are commonly used in the car manufacturing field for assembling the bodywork of motor vehicles and the like.
- EP-A-0 836 912 describes a toggle-lever clamping device for clamping work pieces, comprising a clamping arm supported by a rotatable drive shaft, operatively connected to a linear actuator by means of a toggle-lever mechanism; the linear actuator has a linearly movable thrust member provided with coaxial sliding rollers movable along respective guide surfaces having an arched profile in correspondence with a forward position of the thrust member.
- the toggle-lever mechanism in turn comprises a crank and a connecting link articulated to one another, in which the crank is connected to the drive shaft to rotate together with the clamping arm, while the connecting link is connected to the thrust member in correspondence with the sliding rollers.
- the arched profile of the guide surfaces for guiding the rollers is shaped in such a way that the angle ⁇ , formed between the longitudinal axis of the connecting link of the toggle-lever mechanism and the axis orthogonal to the tangent at the contact point between the guide surface and each sliding roller, is substantially constant along the entire arched profile of the same guide surface; in particular, the known devices are conformed in such a way that the angle ⁇ is usually comprised between 10° and 12°.
- the object of the present invention is to provide a toggle-lever drive device having a rocking work arm, whereby it is possible to exert with the work arm an operative force having an effectively constant value for any possible working position of the arm itself, and which at the same time allows the work arm to irreversibly maintain the working position assumed, in the absence of actuating force by the linear actuator, or in the event of high forces tending to move the arm towards the non-operative position.
- a toggle-lever drive device having a rocking work arm, of the type comprising a pivotally supported work arm, operatively connected to a linear actuator by a toggle-lever mechanism, to rotate between a non-operative position and a working position comprised within a range of angular values,
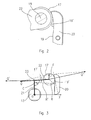
- Fig. 1 shows a toggle-lever drive device having a rocking work arm, according to the present invention, which is in particular in the form of a clamping device for clamping work pieces, in which an external stop for retaining the work arm is provided; it cannot be excluded however that the drive device may be configured for other uses, for example in the form of a laser welding device, in which the work arm is shaped and disposed for welding work pieces of sheet metal, in which an internal stop for the crank of the toggle and/or an adjustable upper stop are provided, or in the form of a stamping press device for imprinting reference numbers on sheet metal.
- the device of Fig. 1 comprises a box-shaped support body 10 for supporting a rocking work arm 11, conformed to clamp work pieces against a shoulder surface forming part of the device itself or provided on a separate structure.
- the work arm 11 is supported by a rotatable drive shaft 13, which is operatively connected to a linear actuator 14 by means of a toggle-lever mechanism 15, in such a way as to drive the arm 11 to rotate between a non-operative position and a working position comprised within a range of angular values, in relation to the operative requirements.
- the working position of the work arm 11 can be precisely set thanks to a stop member or to an adjustable external stop mechanism, for example comprising a first pin 24, adjustably connected to the work arm 11 by means of a screw thread 24', and a second fixed pin 25 supported by a side protrusion 12 of the body 10 of the device, the aforesaid pins 24, 25 being shaped and disposed in such a way as to come into contact with each other in correspondence with the working position of the arm 11 itself, causing it to stop.
- a stop member or to an adjustable external stop mechanism for example comprising a first pin 24, adjustably connected to the work arm 11 by means of a screw thread 24', and a second fixed pin 25 supported by a side protrusion 12 of the body 10 of the device, the aforesaid pins 24, 25 being shaped and disposed in such a way as to come into contact with each other in correspondence with the working position of the arm 11 itself, causing it to stop.
- the linear actuator 14 for example in the form of a pneumatic cylinder, is provided with a linearly movable thrust member 16 to exert an actuating force F, between a backward position and a forward position, in which the clamping arm 11 is in the working position.
- the thrust member 16, at the end facing towards the toggle-lever mechanism 15, is provided with at least one sliding roller 17, having a radius R, pivotally supported on a rotational pin 18.
- the sliding roller 17 is movable along at least one guide surface 19 provided inside the box-shaped body 10, which has an arched profile 19' in correspondence with the forward position of the thrust member 16; preferentially the arched profile 19' is made on a guide cam 20 removably secured within the box-shaped body 10, in such a way as to allow a replacement of the same cam, for example for operative requirements or in the event of wear.
- the toggle-lever mechanism 15 in turn comprises a crank 21 of a length A, connected to the drive shaft 13 to rotate with the clamping arm 11, and a connecting link 22 of a length B, connected to the thrust member 16 in correspondence with the rotational pin 18 of the sliding roller 17; the crank 21 and the connecting link 22 are also connected to each other by means of a hinge pin 23, and form between each other an angle ⁇ , as indicated in Fig. 3 .
- the above toggle-lever mechanism 15 is of a per se known type, and has a dead centre condition, in which the crank 21 and the connecting link 22 are substantially at right angles with each other, with the thrust member 16 in the forward position; in correspondence with this condition, the clamping arm 11 assumes its working position, exerting high operative forces.
- the connecting link 22 of the toggle-lever mechanism 15 can be of the rigid type, as illustrated in Fig. 1 , or can advantageously be of a type elastically yielding in the axial direction in a controlled manner, the type being chosen in relation to the operative requirements of the device.
- the arched profile 19' of the guide surface 19 exerts on the roller 17 a reaction force Q" orthogonally directed to the tangent at the contact point between the roller and the arched profile itself, and oriented according to an angle ⁇ with respect to the longitudinal axis of the connecting link 22.
- force of a constant value is understood to mean that the force is maintained at a nearly constant value, except for a deviation of a negligible entity with respect to the value of the force itself, for any possible working position of the clamping arm 11 itself.
- the working position of the clamping arm 11 proves to be irreversible in the absence of actuating force by the linear actuator 14, and/or in the presence of high external forces tending to shift the arm 11 itself towards the non-operative position.
- a reference system of Cartesian axes X and Y is defined, in which the drive shaft 13 identifies its origin O, in which the axis Y is directed in the same way as the crank 21 when the latter is in a vertical position, or substantially so, in correspondence with the working position of the clamping arm 11, and in which the axis X is directed at right angles to the axis Y, towards the guide surface 19.
- the crank 21 has a length A ranging from 18 mm to 22 mm
- the connecting link 22 has a length B ranging from 18.5 mm to 22.5 mm
- the roller 17 has a radius R ranging from 7 mm to 9 mm.
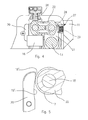
- the toggle-lever drive device can be configured in the form of a laser welding device for welding superimposed metal sheets; in this case, in place of the external stop mechanism for stopping the work arm 11, an internal stop for the crank of the toggle-lever mechanism and/or an adjustable upper stop for the thrust member are provided.
- the laser welding device comprises a stop element 26 for stopping the thrust member 16, which defines the forward position of the thrust member 16 itself; preferentially, the stop element 26 extends into the body 10 through a hole disposed at the end of the same body 10 opposite to the linear actuator, and can be screwably adjusted in the direction of the axis of the thrust member 16.
- an internal stop 27 for the crank 21 of the toggle-lever mechanism 15 can be provided.
- the internal stop 27, which is interposed between an internal wall of the body 10 and the crank 21 itself, comprises a movable plate 28, elastically supported by Belleville washers 29, which is pressed by the crank 21 until it is brought to rest against a stop surface disposed to the rear of the plate 28 itself, thereby causing the work arm 11 to stop in correspondence with the pre-established working position, and allowing to take up every final slack of the linkage of the device.
- the profile of the guide surface 19 for guiding the sliding roller 17, preferentially has an arched profile 19' which extends into a straight section 19" in correspondence with the most forward position for the thrust member 16.
- the aforesaid straight section 19'' which extends parallel to the axis of the thrust member 16, enables the work arm 11 to assume an intermediate angular position between an open non-operative position and a closed working position.
- the toggle-lever drive device can also be configured in the form of a stamping press device for marking reference numbers or other references on sheet metal.
- the rocking work arm 11 of the drive device supports a marking or stamping tool 30 which cooperates with a side shoulder 31 of the device, or with a separated anvil, to mark a sheet metal disposed therebetween.
- the marking tool 30 comprises a rotatably supported marking drum 32 which can be rotated by a side lever 33 in order to automatically change the reference number of the tool 30 at each rocking movement of the work arm 11.
- the side lever 33 is actuated at the non-operative position of the work arm 11 by a protruding stem 34 connected to the body 10 of the device, thereby rotating the drum 32 or a part thereof.
- the work arm 11 of the device according to the invention exerts a constant operative force for any possible working position of the arm 11, a same marking pressure value is applied on the sheet metal by the marking tool 30, also in the case of different thicknesses of the sheet metal, avoiding any undesired or uncontrolled deformation of the sheet metal.
- connecting link 22 of the type elastically yielding in axial direction in a controlled mode allows to equalize in a better way the mechanical stresses within the toggle-lever mechanism and consequently the operative force for the work arm 11; furthermore, such a connecting link 22 reduces the effort necessary for moving the work arm 11 from the working position to the non-operative position, avoiding any blocking of the work arm 11 in the working position.
- a toggle-lever drive device configured according to the present invention, allows the work arm to exert an operative force of an effectively constant value for any possible working position of the arm itself; moreover, the working position assumed by the work arm is irreversibly maintained, in the absence of actuating force by the linear actuator, or in the event of high forces tending to move the arm towards the non-operative position.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08018026A EP2177320A1 (de) | 2008-10-15 | 2008-10-15 | Irreversible Kniehebelantriebsvorrichtung |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08018026A EP2177320A1 (de) | 2008-10-15 | 2008-10-15 | Irreversible Kniehebelantriebsvorrichtung |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP2177320A1 true EP2177320A1 (de) | 2010-04-21 |
Family
ID=40435799
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP08018026A Withdrawn EP2177320A1 (de) | 2008-10-15 | 2008-10-15 | Irreversible Kniehebelantriebsvorrichtung |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP2177320A1 (de) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3061568A1 (de) * | 2015-02-26 | 2016-08-31 | UNIVER S.p.A. | Spannvorrichtung zum Spannen von Werkstücken unterschiedlicher Stärke |
| ITUB20153120A1 (it) * | 2015-08-13 | 2017-02-13 | Pneumax S P A | Unita' di attuazione del tipo a leva articolata a efficienza ottimizzata |
| US10544813B2 (en) | 2016-07-28 | 2020-01-28 | Energium Co., Ltd. | Electrical clamping apparatus |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4921233A (en) * | 1988-05-06 | 1990-05-01 | Genus International | Clamping device for plates or profiled elements placed one against the other |
| DE29713944U1 (de) * | 1997-08-05 | 1997-10-02 | Tuenkers Maschinenbau Gmbh | Druckmittelbetätigbare Kniehebelspannvorrichtung |
| EP0836912A1 (de) | 1996-10-15 | 1998-04-22 | Robotic | Spannvorrichtung mit einem durch einen Kolben angetriebenen Hebel |
| WO2000044531A1 (de) * | 1999-01-27 | 2000-08-03 | Festo Ag & Co. | Kniehebel-spannvorrichtung |
| US6206353B1 (en) * | 1997-07-29 | 2001-03-27 | Benteler Werke Ag | Clamping device for structural components |
| EP1350591A1 (de) * | 2002-04-02 | 2003-10-08 | Luciano Migliori | Spannvorichtung für Laserschweissen |
| US20040113342A1 (en) * | 2001-12-06 | 2004-06-17 | Josef-Gerhard Tunkers | Power-driven toggle-lever clamping device |
| DE102004007346B3 (de) * | 2003-11-04 | 2005-04-21 | Tünkers Maschinenbau Gmbh | Kniehebelspannvorrichtung - auch Spannwerkzeug wie Punktschweißvorrichtung mit Kniehebelgelenkanordnung, oder Clinchwerkzeug mit Kniehebelgelenkanordnung oder dergleichen -, zur Verwendung im Karosseriebau der Kfz-Industrie |
-
2008
- 2008-10-15 EP EP08018026A patent/EP2177320A1/de not_active Withdrawn
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4921233A (en) * | 1988-05-06 | 1990-05-01 | Genus International | Clamping device for plates or profiled elements placed one against the other |
| EP0836912A1 (de) | 1996-10-15 | 1998-04-22 | Robotic | Spannvorrichtung mit einem durch einen Kolben angetriebenen Hebel |
| US6206353B1 (en) * | 1997-07-29 | 2001-03-27 | Benteler Werke Ag | Clamping device for structural components |
| DE29713944U1 (de) * | 1997-08-05 | 1997-10-02 | Tuenkers Maschinenbau Gmbh | Druckmittelbetätigbare Kniehebelspannvorrichtung |
| WO2000044531A1 (de) * | 1999-01-27 | 2000-08-03 | Festo Ag & Co. | Kniehebel-spannvorrichtung |
| US20040113342A1 (en) * | 2001-12-06 | 2004-06-17 | Josef-Gerhard Tunkers | Power-driven toggle-lever clamping device |
| EP1350591A1 (de) * | 2002-04-02 | 2003-10-08 | Luciano Migliori | Spannvorichtung für Laserschweissen |
| DE102004007346B3 (de) * | 2003-11-04 | 2005-04-21 | Tünkers Maschinenbau Gmbh | Kniehebelspannvorrichtung - auch Spannwerkzeug wie Punktschweißvorrichtung mit Kniehebelgelenkanordnung, oder Clinchwerkzeug mit Kniehebelgelenkanordnung oder dergleichen -, zur Verwendung im Karosseriebau der Kfz-Industrie |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3061568A1 (de) * | 2015-02-26 | 2016-08-31 | UNIVER S.p.A. | Spannvorrichtung zum Spannen von Werkstücken unterschiedlicher Stärke |
| ITUB20153120A1 (it) * | 2015-08-13 | 2017-02-13 | Pneumax S P A | Unita' di attuazione del tipo a leva articolata a efficienza ottimizzata |
| EP3130809A1 (de) * | 2015-08-13 | 2017-02-15 | Pneumax S.p.A. | Gelenkhebelantrieb mit optimiertem wirkungsgrad |
| US10544813B2 (en) | 2016-07-28 | 2020-01-28 | Energium Co., Ltd. | Electrical clamping apparatus |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2983844B1 (de) | Stempelvorrichtung | |
| EP3006168A2 (de) | Greifer | |
| EP2452761B1 (de) | Clinch-Klemme | |
| KR20050012129A (ko) | 작업물을 죄기 위한 자기보상 토글클램프 | |
| KR101331474B1 (ko) | 띠톱날 안내 장치에 의한 띠톱날 협지 방법 및 띠톱날 안내 장치 | |
| US20060096957A1 (en) | Clamping device for processing work pieces | |
| US10174820B2 (en) | Actuating device of the articulated lever or cam type for the precise positioning of a pivotable arm | |
| WO2015064590A1 (ja) | 切断装置 | |
| US6739587B2 (en) | Toggle lever clamping device | |
| EP2177320A1 (de) | Irreversible Kniehebelantriebsvorrichtung | |
| US7290816B2 (en) | Work piece gripping device for robotized manipulating systems | |
| US7258030B2 (en) | Failsafe element for rotary cam unit used in a flanged die | |
| JP5690950B2 (ja) | 円形状カム装置を有する成形型 | |
| DE102018002358B4 (de) | Kniehebelspannvorrichtung, zur Verwendung im Karosseriebau der Kfz-Industrie mit zusätzlichem Widerlager am Kniehebelgelenkelement | |
| EP3078453A1 (de) | Betätigungsvorrichtung vom gelenkhebel- oder nockentyp zur genauen positionierung eines schwenkbaren arms | |
| AU677400B2 (en) | Machining tool for work pieces | |
| US5948284A (en) | Equalizing cam rocker fixture assembly for a resistance welding gun | |
| US20050252269A1 (en) | Toggle press | |
| US5641190A (en) | Power-operated gripping device with two jaws | |
| ITMI20070774A1 (it) | Dispositivo di comando a ginocchiera di tipo irreversibile | |
| JP2018187648A (ja) | 型取付装置 | |
| JP5525829B2 (ja) | 帯鋸刃案内装置による帯鋸刃挟持方法及び帯鋸刃案内装置 | |
| JP2023122372A (ja) | クランプ装置 | |
| JP2011067831A (ja) | 曲げ加工機 | |
| KR20190048237A (ko) | 볼스크류 예압조정장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| AKY | No designation fees paid | ||
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: 8566 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20101022 |