EP2015585A2 - Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren - Google Patents
Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren Download PDFInfo
- Publication number
- EP2015585A2 EP2015585A2 EP20080016888 EP08016888A EP2015585A2 EP 2015585 A2 EP2015585 A2 EP 2015585A2 EP 20080016888 EP20080016888 EP 20080016888 EP 08016888 A EP08016888 A EP 08016888A EP 2015585 A2 EP2015585 A2 EP 2015585A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- list
- picture
- direct mode
- field
- frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000013598 vector Substances 0.000 title claims abstract description 425
- 238000000034 method Methods 0.000 title claims abstract description 82
- 238000009795 derivation Methods 0.000 claims abstract description 17
- 230000002123 temporal effect Effects 0.000 description 133
- 238000004364 calculation method Methods 0.000 description 20
- 230000006835 compression Effects 0.000 description 5
- 238000007906 compression Methods 0.000 description 5
- 238000007796 conventional method Methods 0.000 description 5
- 238000007792 addition Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images











Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/577—Motion compensation with bidirectional frame interpolation, i.e. using B-pictures
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/521—Processing of motion vectors for estimating the reliability of the determined motion vectors or motion vector field, e.g. for smoothing the motion vector field or for correcting motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/573—Motion compensation with multiple frame prediction using two or more reference frames in a given prediction direction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/56—Motion estimation with initialisation of the vector search, e.g. estimating a good candidate to initiate a search
Definitions
- the present invention relates to a moving picture coding method, and more particularly to a technique for deriving direct mode motion vectors of a B (Bi-predictive) picture defined in a next-generation moving picture compression technique.
- a conventional B picture has five types of predictive modes such as forward mode, backward mode, bi-directional mode, direct mode and intra mode.
- forward mode backward mode and bi-directional mode
- the directions of motion vectors can be recognized from mode names because direction information are involved in the mode names.
- the direct mode two motion vectors of both directions are derived from a motion of a co-located block in a neighboring picture on the basis of a temporal redundancy characteristic that motion continuity is constantly maintained between two adjacent pictures.
- This direct mode has an advantage in terms of coding efficiency because motion information is not sent to a decoder.
- a B picture proposed in a next-generation moving picture compression technique such as H.264 or MPEG-4 part 10 is characterized in that the B picture is allowed to be used as a reference picture because it can be stored in a reference picture buffer.
- This B picture is further characterized in that it has five types of predictive modes such as list 0 mode, list 1 mode, bi-predictive mode, direct mode and intra mode.
- the list 0 mode is similar to the conventional forward mode, and motion information such as a reference picture index and motion vector difference are indicated respectively by ref_idx_10 and mvd_10.
- the list 1 mode is also similar to the conventional backward mode, and motion information such as a reference picture index and motion vector difference are indicated respectively by ref_idx_l1 and mvd_l1.
- the bi-predictive mode has two reference pictures, both of which may be located temporally before or after the B picture, or which may be located temporally before and after the B picture, respectively.
- eachreference pictures has picture order count (POC) data which is temporal location information.
- POC picture order count
- motion vectors are obtained by selecting any one of a spatial technique and temporal technique.
- the spatial direct mode technique is to derive list 0 and list 1 reference picture indexes and motion vectors from neighboring blocks of a macroblock to be coded.
- the temporal direct mode technique is to derive a list 0 motion vector MV F and list 1 motion vector MV B by scaling a list 0 motion vector of a co-located block in a list 1 reference picture for direct mode, which is similar to the conventional B picture.
- the list 1 reference picture for direct mode is a picture where an index for list 1 prediction is 0, and a list 0 reference picture for direct mode is a list 0 reference picture pointed by a motion vector of a co-located block in the list 1 reference picture for direct mode.
- Figs. 1a to 1c show default indexes for list 0 prediction, default indexes for list 1 prediction and list 1 reference pictures for direct mode of respective B pictures in an IBBBP pattern when the number of available list 0 and list 1 reference pictures (or the size of a short-term buffer) is 6, respectively.
- the default indexes for list 0 prediction and the default indexes for list 1 prediction are dependant on an output order, or POC value, of a previously decoded reference picture regardless of a decoding order.
- all the B pictures use a temporally following P picture as the list 1 reference picture for direct mode.
- Figs. 2a to 2c show default indexes for list 0 prediction, default indexes for list 1 prediction and list 1 reference pictures for direct mode of respective B pictures in an IBBB pattern using only the B pictures, respectively.
- a B picture to be coded is B8
- a temporally preceding B5 with a list 1 index 0 is a list 1 reference picture for direct mode.
- a list 1 reference picture for direct mode of B7 to be subsequently decoded is the temporally following B8.
- a list 1 reference picture for direct mode of B9 to be subsequently decoded is the temporally preceding B7.
- a list 1 reference picture for direct mode may be a P or B picture temporally following a B picture to be coded, or a B picture temporally preceding it.
- Figs. 3a to 3h show modes that a co-located block in a list 1 reference picture for direct mode can have when the list 1 reference picture temporally follows a B picture.
- the list 1 reference picture can be a P picture or B picture
- the co-located block thereof has one or two motion vectors, or the intra mode.
- the next-generation moving picture compression technique such as H.264 or MPEG-4 part 10, permits the reordering of reference picture indexes at a slice level, so an index 0 for list 1 prediction can be assigned to a picture just after a B picture. That is, since the list 1 reference picture can exist just after a B picture, a motion vector of the co-located block can be directed forward or backward.
- Figs. 4a to 4h show modes that a co-located block in a list 1 reference picture for direct mode can have when the list 1 reference picture temporally precedes a B picture.
- the co-located block has one or two motion vectors, or the intra mode, as described above.
- Other reference pictures can be present between the list 1 reference picture and the B picture, so a motion vector of the co-located block can point to temporally forward or backward direction.
- the list 1 reference picture for direct mode can have various predictive modes, resulting in a need to explore a method for calculating direct mode motion vectors in consideration of such various cases.
- the present invention has been made in view of the above problems, and it is an object of the present invention to provide a method for calculating direct mode motion vectors of a B (Bi-predictive) picture defined in a next-generation moving picture compression technique, wherein a technique for deriving the direct mode motion vectors of the B picture is proposed to raise the probability that a direct mode will be selected as a predictive mode of a macroblock, so as to improve a B picture coding efficiency.
- the above and other objects can be accomplished by the provision of a method for calculating direct mode motion vectors of a B (Bi-predictive) picture in a moving picture coding system to extract the direct mode motion vectors of the B picture, comprising the step of, if a co-located block in a list 1 reference picture for direct mode has two motion vectors, selecting any one (a list 0 motion vector or list 1 motion vector) of the two motion vectors, and deriving the direct mode motion vectors of the B picture from the selected motion vector.
- a method for calculating direct mode motion vectors of a B (Bi-predictive) picture in a moving picture coding system to extract the direct mode motion vectors of the B picture comprising the step of, if a co-located block in a list 1 reference picture for direct mode has two motion vectors, selecting any one (a list 0 motion vector or list 1 motion vector) of the two motion vectors, and deriving the direct mode motion vectors of the B picture from the selected motion vector.
- the above step may include the step of selecting one of the list 0 and list 1 motion vectors, which points to a picture temporally closer to the list 1 reference picture for direct mode, as a motion vector for derivation of the direct mode motion vectors, selecting the list 0 motion vector as the motion vector for derivation of the direct mode motion vectors if the two motion vectors point to the same reference picture, determining a reference picture pointed by the selected motion vector as a list 0 reference picture for direct mode, and deriving the direct mode motion vectors of the B picture.
- the above step may include the step of unconditionally selecting the list 0 motion vector as a motion vector for derivation of the direct mode motion vectors regardless of a temporal distance, determining a reference picture pointed by the list 0 motion vector as a list 0 reference picture for direct mode, and deriving the direct mode motion vectors of the B picture.
- a method for calculating direct mode motion vectors of a B (Bi-predictive) picture in a moving picture coding system to extract the direct mode motion vectors of the B picture comprising the step of selecting any one of motion vectors of a co-located block in a list 1 reference picture for direct mode as a motion vector for derivation of the direct mode motion vectors regardless of modes (a list 0 mode and/or a list 1 mode) of the motion vectors of the co-located block, determining a reference picture pointed by the selected motion vector as a list 0 reference picture for direct mode, and calculating the direct mode motion vectors of the B picture.
- a conventional method has been proposed to derive direct mode motion vectors from a list 0 motion vector of a co-located block. If this conventional method is applied to a case where a co-located block in a list 1 reference picture has only one list 1 motion vector, all the direct mode motion vectors become 0 because the list 0 motion vector is 0. However, the present method can overcome this problem.
- a method for calculating direct mode motion vectors of a B (Bi-predictive) picture in a moving picture coding system to extract the direct mode motion vectors of the B picture comprising the step of, if a co-located block in a list 1 reference picture for direct mode has only one list 1 motion vector, considering the co-located block to have a zero motion, determining a decoded picture located temporally just before the B picture as a list 0 reference picture for direct mode, and deriving the direct mode motion vectors of the B picture.
- a method for calculating direct mode motion vectors of a B (Bi-predictive) picture in a moving picture coding system to extract the direct mode motion vectors of the B picture comprising the step of, if a co-located block in a list 1 reference picture for direct mode has only one list 1 motion vector, using the list 1 motion vector of the co-located block as a motion vector for derivation of the direct mode motion vectors, determining a decoded picture located temporally just before the B picture as a list 0 reference picture for direct mode, and deriving the direct mode motion vectors of the B picture.
- a method for calculating direct mode motion vectors of a B (Bi-predictive) picture in a moving picture coding system to extract the direct mode motion vectors of the B picture comprising the step of, if a co-located block in a list 1 reference picture for direct mode has only one list 1 motion vector, using the list 1 motion vector of the co-located block as a motion vector for derivation of the direct mode motion vectors, determining a reference picture pointed by the list 1 motion vector of the co-located block as a list 0 reference picture for direct mode, and deriving the direct mode motion vectors of the B picture.
- a method for calculating direct mode motion vectors of a B (Bi-predictive) picture in a moving picture coding system to extract the direct mode motion vectors of the B picture comprising the step of setting a latest decoded picture as a list 1 reference picture for direct mode, scaling a motion vector of a co-located block in the list 1 reference picture for direct mode to derive a list 0 motion vector MV F and a list 1 motion vector MV B , and calculating the direct mode motion vectors of the B picture.
- a picture having an index 0 for list 1 prediction is defined to be a list 1 reference picture for direct mode.
- a method for calculating direct mode motion vectors of a B (Bi-predictive) picture in a moving picture coding system to extract the direct mode motion vectors of the B picture comprising the step of, if a list 1 reference picture for direct modetemporally precedes the B picture, scaling a motion vector of a co-located block in the list 1 reference picture for direct mode to derive a list 0 motion vector MV F and a list 1 motion vector MV B , and calculating the direct mode motion vectors of the B picture.
- the above step may include the step of, if a macroblock of the B picture is in a frame mode, a co-located macroblock of the list 1 reference picture is in a field mode and a list 0 reference picture for direct mode temporally precedes the list 1 reference picture, calculating the direct mode motion vectors MV F and MV B of a B frame from the below equation where motion information of a co-located block in a field 1 of a list 1 reference frame is used for calculation of the direct mode motion vectors:
- TD B represents a temporal distance between a current B frame and
- the above step may include the step of, if a macroblock of the B picture is in a frame mode, a co-located macroblock of the list 1 reference picture is in a field mode and a list 0 reference picture for direct mode temporally follows the list 1 reference picture, calculating the direct mode motion vectors MV F and MV B of a B frame from the below equation where motion information of a co-located block in a field 1 of a list 1 reference frame is used for calculation of the direct mode motion vectors:
- TD B represents a temporal distance between a current B
- a method for calculating direct mode motion vectors of a B (Bi-predictive) picture in a moving picture coding system to extract the direct mode motion vectors of the B picture comprising the step of, if both a list 0 reference picture and list 1 reference picture for direct mode temporally follow the B picture, scaling a motion vector of a co-located block in the list 1 reference picture for direct mode to derive a list 0 motion vector MV F and a list 1 motion vector MV B , and calculating the direct mode motion vectors of the B picture.
- the above step may include the step of, if a macroblock of the B picture is in a frame mode, a co-located macroblock of the list 1 reference picture is in a field mode and the list 0 reference picture for direct mode temporally follows the list 1 reference picture, calculating the direct mode motion vectors MV F and MV B of a B frame from the below equation where motion information of a co-located block in a field 0 of a list 1 reference frame is used for calculation of the direct mode motion vectors:
- TD B represents a temporal distance between
- the above step may include the step of, if a macroblock of the B picture is in a frame mode, a co-located macroblock of the list 1 reference picture is in a field mode and the list 0 reference picture for direct mode temporally precedes the list 1 reference picture, calculating the direct mode motion vectors MV F and MV B of a B frame from the below equation where motion information of a co-located block in a field 0 of a list 1 reference frame is used for calculation of the direct mode motion vectors:
- TD B represents
- a method for calculating direct mode motion vectors of a B (Bi-predictive) picture in a moving picture coding system to extract the direct mode motion vectors of the B picture comprising the step of assigning a sign to an inter-picture temporal distance value, scaling a motion vector of a co-located block in a list 1 reference picture for direct mode regardless of locations of the list 0 and the list 1 reference pictures for direct mode to derive a list 0 motion vector MV F and a list 1 motion vector MV B , and calculating the direct mode motion vectors of the B picture.
- TD B,i represents a temporal distance between a current B field and a list 0 reference field, which is assigned a positive (+) sign
- the above step may include the step of, if a macroblock of the B picture is in a frame mode, a co-located macroblock of the list 1 reference picture is in a field mode and the list 1 reference picture temporally follows the B picture, calculating the direct mode motion vectors MV F and MV B of a B frame from the below equation where motion information of a co-located block in a field 0 of a list 1 reference frame is used for calculation of the direct mode motion vectors:
- TD B represents a temporal distance between a current B frame and
- the above step may include the step of, if a macroblock of the B picture is in a frame mode, a co-located macroblock of the list 1 reference picture is in a field mode and the list 1 reference picture temporally precedes the B picture, calculating the direct mode motion vectors MV F and MV B of a B frame from the below equation where motion information of a co-located block in a field 1 of a list 1 reference frame is used for calculation of the direct mode motion vectors:
- MV F TD B ⁇ MV 1 / TD D
- 1 MV B TD B - TD D , 1 ⁇ MV 1 / TD D , 1 or
- Z TD B ⁇ 256 / TD D
- 1 MV F Z ⁇ MV 1 + 128 > > 8
- TD B represents a temporal distance between a current B frame and a list 0 reference frame, which is
- a method for calculating direct mode motion vectors of a B (Bi-predictive) picture in a moving picture coding system to extract the direct mode motion vectors of the B picture comprising the step of, if a co-located macroblock in a list 1 reference picture for direct mode is in an intra mode, predicting and calculating list 0 and list 1 reference pictures and motion vectors from neighboring blocks of a macroblock of the B picture to be coded, on the basis of a spatial redundancy, and calculating the direct mode motion vectors of the B picture.
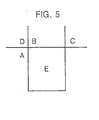
- the above step may include the step of, if neighboring blocks A, B and C of the macroblock to be coded refer to different reference pictures, selecting a reference picture with a smallest index as the reference picture for each list.
- the above step may include the step of, if two or more ones of neighboring blocks of the macroblock to be coded refer to a reference picture with the same index, selecting that reference picture as the reference picture for each list.
- the above step may include the step of, setting its list 0 and list 1 motion vectors to 0 if any one of neighboring blocks A, B and C of the macroblock to be coded is in the intra mode, selecting a motion vector having the same direction as that of a temporal location of the reference picture for each list from a neighboring block, and acquiring the motion vector for each list through a median operation, or selecting only one of the two motion vectors from that block if a neighboring block has two motion vectors with the same directions and acquiring the motion vector for each list through the median operation including the selected motion vector.
- the above step may include the step of, if no effective reference picture index for each list mode can be derived, setting list 0 and list 1 reference picture indexes to 0 and setting the motion vector for each list mode to 0.
- the present invention proposes a method for deriving direct mode motion vectors when a co-located macroblock in a list 1 reference picture for direct mode is in an intra mode, and a method for acquiring the direct mode motion vectors in a case where the list 1 reference picture temporally follows a B picture and in a case where the list 1 reference picture temporally precedes the B picture.
- the present invention further proposes a method for calculating the direct mode motion vectors regardless of the locations of list 0 and list 1 reference pictures for direct mode by assigning a sign to an inter-picture temporal distance value to simplify algorithms used for calculation of the direct mode motion vectors.
- a frame mode and a field mode are switched at a picture level, so the B picture and list 1 reference picture can be coded into frame mode or fieldmode.
- a macroblock of the B picture and a co-located macroblock of the list 1 reference picture have four types of frame/field-coded combinations.
- a co-located macroblock in a list 1 reference picture for direct mode can be in the intra mode regardless of a temporal location of the reference picture. Because the macroblock in this mode has no motion information, a conventional method simply sets direct mode motion vectors to 0 and defines a list 0 reference picture to be the latest decoded picture. However, the conventional method cannot guarantee a high coding efficiency. Therefore, the present invention predicts and calculates list 0 and list 1 reference pictures and motion vectors from neighboring blocks of a macroblock of a B picture to be coded, on the basis of a spatial redundancy.
- FIG. 5 is a view illustrating the motion vector prediction of a block E using motion vectors of neighboring blocks A, B and C in consideration of a general spatial redundancy.
- a motion vector for each list mode is acquired through the following motion vector prediction. At this time, if any one of the neighboring blocks A, B and C is in the intra mode, its list 0 and list 1 motion vectors are set to 0.
- the co-located block in the list 1 reference picture can have one motion vector or two motion vectors.
- one (L0 MV or L1 MV) of the two motion vectors is selected and direct mode motion vectors are derived from the selected motion vector (this will hereinafter be described on the basis of the case where L0 MV (list 0 motion vector) is selected).
- Figs. 3a and 3c can be simply depicted as Fig. 6a , Figs. 3b, 3d and 3e as Fig. 6c , and Figs. 3g and 3h as Fig. 6b , respectively.
- Figs. 7a to 7d show cases where both the macroblock of the B picture and the co-located macroblock of the list 1 reference picture are in the field mode.
- Each motion vector of the macroblock of the B picture is derived from a motion vector of a co-located block in a list 1 reference field of the same parity.
- list 0 and list 1 reference pictures for the direct mode are located temporally before and after the B picture, respectively ( Fig. 7a ), or if both the list 0 and list 1 reference pictures for the direct mode are located temporally after the B picture and the list 0 reference picture temporally follows the list 1 reference picture ( Fig.
- both the list 0 and list 1 reference pictures for the direct mode are located temporally after the B picture and the list 0 reference picture temporally precedes the list 1 reference picture ( Figs.
- Figs. 8a to 8c show cases where the macroblock of the B picture is in the field mode and the co-located macroblock of the list 1 reference picture is in the frame mode.
- the vertical coordinate of the current macroblock be y current
- the vertical coordinate of the co-located macroblock of the list 1 reference picture be y co-located
- list 0 and list 1 reference fields are present in the same parities of the list 0 and list 1 reference frames, respectively.
- both the list 0 and list 1 reference pictures for the direct mode are located temporally after the B picture and the list 0 reference picture temporally precedes the list 1 reference picture ( Fig. 8c )
- Figs. 9a to 9c show cases where the macroblock of the B picture is in the frame mode and the co-located macroblock of the list 1 reference picture is in the field mode.
- the vertical coordinate of the current macroblock be y current
- the vertical coordinate of the co-located macroblock of the list 1 reference picture be y co-located
- motion information of a co-located block of the field 0 is used for calculation of the direct mode motion vectors.
- both the list 0 and list 1 reference pictures for the direct mode are located temporally after the B picture and the list 0 reference picture temporally precedes the list 1 reference picture ( Fig. 9c )
- TD B a temporal distance between the current B frame and the list 0 reference frame
- TD D 0 represents a temporal distance between a field 0 of the list 1 reference frame and the list 0 reference field
- MV 0 a motion vector of the co-located block in the field 0 of the list 1 reference frame for direct mode.
- both the list 0 and list 1 reference pictures are always located temporally before the B picture.
- the co-located block in the list 1 reference picture can have one motion vector or two motion vectors.
- one (L0 MV or L1 MV) of the two motion vectors is selected and direct mode motion vectors are derived from the selected motion vector (this will hereinafter be described on the basis of the case where L0 MV (list 0 motion vector) is selected).
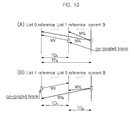
- Figs. 4a, 4c, 4e, 4g and 4h can be simply depicted as Fig. 10a , and Figs. 4b and 4d as Fig. 10b , respectively.
- TD B,i a temporal distance between a current B field and a list 0 reference field
- TD D,i a temporal distance between a list 1 reference field and the list 0 reference field
- MV i represents a motion vector of a co-located block in a list 1 reference field for direct mode.
- the direct mode list 0 and list 1 motion vectors MV F,i and MV B,i are calculated as follows ( Figs.
- TD B,i represents a temporal distance between the current B field and the list 0 reference field
- TD D,i represents a temporal distance between the list 1 reference field and the list 0 reference field
- MV i represents a motion vector of the co-located block in the list 1 reference field for direct mode.
- motion information of a co-located block of the field 1 f1 is used for calculation of the direct mode motion vectors.
- TD B represents a temporal distance between the current B frame and the list 0 reference frame
- TD D,1 represents a temporal distance between a field 1 of the list 1 reference frame and the list 0 reference field
- MV 1 represents a motion vector of the co-located block in the field 1 of the list 1 reference frame for direct mode.
- TD B a temporal distance between the current B frame and the list 0 reference frame
- TD D,1 a temporal distance between a field 1 of the list 1 reference frame and the list 0 reference field
- MV 1 a motion vector of the co-located block in the field 1 of the list 1 reference frame for direct mode.
- TD B,i represents a temporal distance between a current B field and a list 0 reference field, which is assigned a positive (+) sign if it is measured from the B field and a negative (-)
- the co-located macroblock of the list 1 reference picture is in the field mode and the list 1 reference picture temporally follows the B picture, the field 0 of the list 1 reference frame is temporally closer to the B picture than the field 1 thereof, so motion information of a co-located block of the field 0 is used for calculation of the direct mode motion vectors.
- the direct mode motion vectors MV F and MV B of the B frame can be obtained from the below equation where the motion information of the co-located block in the field 0 of the list 1 reference frame is used for calculation of the direct mode motion vectors:
- MV F TD B ⁇ MV 0 / TD D , 0
- MV F Z ⁇ MV 0 + 128 > > 8
- TD B represents a temporal distance between the current B frame and the list 0 reference frame, which is assigned a positive (+) sign if it is measured from the B frame and a negative (-) sign if it is measured from the list 0 reference frame
- TD D,0 represents a temporal distance between a field
- the field 1 of the list 1 reference frame is temporally closer to the B picture than the field 0 thereof, so motion information of a co-located block of the field 1 is used for calculation of the direct mode motion vectors.
- the direct mode motion vectors MV F and MV B of the B frame can be obtained from the below equation where the motion information of the co-located block in the field 1 of the list 1 reference frame is used for calculation of the direct mode motion vectors:
- MV F TD B ⁇ MV 1 / TD D , 1
- MV B TD B - TD D , 1 ⁇ MV 1 / TD D , 1 or
- Z TD B ⁇ 256 / TD D
- 1 MV F Z ⁇ MV 1 + 128 > > 8
- TD B represents a temporal distance between the current B frame and the list 0 reference frame, which is assigned a positive (+) sign if it is measured from the B frame and a negative (-) sign if it is measured from the list 0 reference frame
- TD D,1 represents a temporal distance between a field 1 of the list 1 reference frame and the list
- the present invention provides a method for calculating direct mode motion vectors of a B (Bi-predictive) picture defined in a next-generation moving picture compression technique.
- a technique for extracting the direct mode motion vectors of the B picture is proposed to raise the probability that a direct mode will be selected as a predictive mode of a macroblock, thereby improving a B picture coding efficiency.
- the invention provides a method for calculating direct mode motion vectors of a B (Bi-predictive) picture in a moving picture coding system to extract the direct mode motion vectors of the B picture.
- a list 1 reference picture for direct mode temporally precedes or follows the B picture
- any one of motion vectors of a co-located block in the list 1 reference picture is determined as a motion vector for derivation of the direct mode motion vectors regardless of modes (a list 0 mode and/or a list 1 mode) of the motion vectors of the co-located block.
- the determined motion vector is scaled to derive a list 0 motion vector MV F and a list 1 motion vector MV B .
- a reference picture pointed by the determined motion vector is determined as a list 0 reference picture for direct mode.
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Image Analysis (AREA)
- Studio Devices (AREA)
- Compression, Expansion, Code Conversion, And Decoders (AREA)
- Gyroscopes (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Color Television Systems (AREA)
- Processing Or Creating Images (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SI200331923T SI2015585T1 (sl) | 2002-10-04 | 2003-01-07 | Postopek ekstrakcije vektorja premikanja v direktnem modusu |
| CY20111100014T CY1111077T1 (el) | 2002-10-04 | 2011-01-04 | Μεθοδος εξαγωγης διανυσματων κινησης αμεσου τροπου |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR20020060742 | 2002-10-04 | ||
| KR20020061243 | 2002-10-08 | ||
| KR10-2002-0071226A KR100506864B1 (ko) | 2002-10-04 | 2002-11-15 | 모션벡터 결정방법 |
| EP20030000209 EP1406453B1 (de) | 2002-10-04 | 2003-01-07 | Direkt-Modus Bewegungsvektorberechnung für B-Bilder |
| EP20070003015 EP1821547B1 (de) | 2002-10-04 | 2003-01-07 | Bewegungsvektorberechnung im Direktmodus für B-Bilder |
Related Parent Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20070003015 Division EP1821547B1 (de) | 2002-10-04 | 2003-01-07 | Bewegungsvektorberechnung im Direktmodus für B-Bilder |
| EP03000209.1 Division | 2003-01-07 | ||
| EP07003015.0 Division | 2007-02-13 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2015585A2 true EP2015585A2 (de) | 2009-01-14 |
| EP2015585A3 EP2015585A3 (de) | 2009-01-21 |
| EP2015585B1 EP2015585B1 (de) | 2010-10-06 |
Family
ID=35871226
Family Applications (21)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20070003014 Expired - Lifetime EP1809048B1 (de) | 2002-10-04 | 2003-01-07 | System zur Bewegungsvektorberechnung im Direktmodus für B-Bilder |
| EP20080016892 Expired - Lifetime EP2009926B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000888 Expired - Lifetime EP2046060B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20070003015 Expired - Lifetime EP1821547B1 (de) | 2002-10-04 | 2003-01-07 | Bewegungsvektorberechnung im Direktmodus für B-Bilder |
| EP20080016894 Expired - Lifetime EP2015586B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20080016891 Expired - Lifetime EP2003900B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000886 Expired - Lifetime EP2046058B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000885 Expired - Lifetime EP2046057B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000883 Ceased EP2046055A3 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20030000209 Expired - Lifetime EP1406453B1 (de) | 2002-10-04 | 2003-01-07 | Direkt-Modus Bewegungsvektorberechnung für B-Bilder |
| EP20090000866 Expired - Lifetime EP2059054B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20080016888 Expired - Lifetime EP2015585B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20070003016 Expired - Lifetime EP1796396B8 (de) | 2002-10-04 | 2003-01-07 | Bewegungsvektorberechnung im Direktmodus für B-Bilder |
| EP20050018606 Expired - Lifetime EP1603344B1 (de) | 2002-10-04 | 2003-01-07 | Direkt-Modus Bewegungsvektorberechnung für B-Bilder |
| EP20080016889 Expired - Lifetime EP2009925B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000865 Expired - Lifetime EP2046054B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20080016893 Expired - Lifetime EP2009927B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000887 Expired - Lifetime EP2046059B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000884 Expired - Lifetime EP2046056B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20080016890 Expired - Lifetime EP2003899B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20080016895 Expired - Lifetime EP2009928B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
Family Applications Before (11)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20070003014 Expired - Lifetime EP1809048B1 (de) | 2002-10-04 | 2003-01-07 | System zur Bewegungsvektorberechnung im Direktmodus für B-Bilder |
| EP20080016892 Expired - Lifetime EP2009926B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000888 Expired - Lifetime EP2046060B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20070003015 Expired - Lifetime EP1821547B1 (de) | 2002-10-04 | 2003-01-07 | Bewegungsvektorberechnung im Direktmodus für B-Bilder |
| EP20080016894 Expired - Lifetime EP2015586B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20080016891 Expired - Lifetime EP2003900B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000886 Expired - Lifetime EP2046058B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000885 Expired - Lifetime EP2046057B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000883 Ceased EP2046055A3 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20030000209 Expired - Lifetime EP1406453B1 (de) | 2002-10-04 | 2003-01-07 | Direkt-Modus Bewegungsvektorberechnung für B-Bilder |
| EP20090000866 Expired - Lifetime EP2059054B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
Family Applications After (9)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20070003016 Expired - Lifetime EP1796396B8 (de) | 2002-10-04 | 2003-01-07 | Bewegungsvektorberechnung im Direktmodus für B-Bilder |
| EP20050018606 Expired - Lifetime EP1603344B1 (de) | 2002-10-04 | 2003-01-07 | Direkt-Modus Bewegungsvektorberechnung für B-Bilder |
| EP20080016889 Expired - Lifetime EP2009925B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000865 Expired - Lifetime EP2046054B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20080016893 Expired - Lifetime EP2009927B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000887 Expired - Lifetime EP2046059B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20090000884 Expired - Lifetime EP2046056B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20080016890 Expired - Lifetime EP2003899B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
| EP20080016895 Expired - Lifetime EP2009928B1 (de) | 2002-10-04 | 2003-01-07 | Verfahren zur Extraktion von Direktmodus-Bewegungsvektoren |
Country Status (14)
| Country | Link |
|---|---|
| US (31) | US7233621B2 (de) |
| EP (21) | EP1809048B1 (de) |
| JP (19) | JP4020789B2 (de) |
| KR (1) | KR100506864B1 (de) |
| CN (3) | CN1812585B (de) |
| AT (10) | ATE488097T1 (de) |
| CY (10) | CY1106351T1 (de) |
| DE (13) | DE20321473U1 (de) |
| DK (10) | DK1809048T3 (de) |
| ES (1) | ES2281573T3 (de) |
| GB (4) | GB2406460B (de) |
| NL (3) | NL1022333C2 (de) |
| PT (10) | PT1821547E (de) |
| SI (10) | SI2003900T1 (de) |
Families Citing this family (149)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6499060B1 (en) | 1999-03-12 | 2002-12-24 | Microsoft Corporation | Media coding for loss recovery with remotely predicted data units |
| TR201802352T4 (tr) * | 2001-11-06 | 2018-03-21 | Panasonic Ip Corp America | Hareketli resim kodlama usulü ve hareketli resim kod çözme usulü. |
| US20030099294A1 (en) * | 2001-11-27 | 2003-05-29 | Limin Wang | Picture level adaptive frame/field coding for digital video content |
| US7003035B2 (en) | 2002-01-25 | 2006-02-21 | Microsoft Corporation | Video coding methods and apparatuses |
| JP2004088722A (ja) | 2002-03-04 | 2004-03-18 | Matsushita Electric Ind Co Ltd | 動画像符号化方法および動画像復号化方法 |
| KR20040099100A (ko) | 2002-04-19 | 2004-11-26 | 마쯔시다덴기산교 가부시키가이샤 | 움직임 벡터 계산 방법 |
| US20040001546A1 (en) | 2002-06-03 | 2004-01-01 | Alexandros Tourapis | Spatiotemporal prediction for bidirectionally predictive (B) pictures and motion vector prediction for multi-picture reference motion compensation |
| US7280700B2 (en) | 2002-07-05 | 2007-10-09 | Microsoft Corporation | Optimization techniques for data compression |
| US7088776B2 (en) | 2002-07-15 | 2006-08-08 | Apple Computer, Inc. | Method and apparatus for variable accuracy inter-picture timing specification for digital video encoding |
| US7154952B2 (en) | 2002-07-19 | 2006-12-26 | Microsoft Corporation | Timestamp-independent motion vector prediction for predictive (P) and bidirectionally predictive (B) pictures |
| US6728315B2 (en) | 2002-07-24 | 2004-04-27 | Apple Computer, Inc. | Method and apparatus for variable accuracy inter-picture timing specification for digital video encoding with reduced requirements for division operations |
| US8254461B2 (en) | 2002-07-24 | 2012-08-28 | Apple Inc. | Method and apparatus for variable accuracy inter-picture timing specification for digital video encoding with reduced requirements for division operations |
| KR100506864B1 (ko) | 2002-10-04 | 2005-08-05 | 엘지전자 주식회사 | 모션벡터 결정방법 |
| US7499493B2 (en) * | 2003-06-20 | 2009-03-03 | Lsi Corporation | Dual block motion vector storage in compressed form |
| US7609763B2 (en) | 2003-07-18 | 2009-10-27 | Microsoft Corporation | Advanced bi-directional predictive coding of video frames |
| US7499495B2 (en) | 2003-07-18 | 2009-03-03 | Microsoft Corporation | Extended range motion vectors |
| US20050013498A1 (en) | 2003-07-18 | 2005-01-20 | Microsoft Corporation | Coding of motion vector information |
| US7616692B2 (en) * | 2003-09-07 | 2009-11-10 | Microsoft Corporation | Hybrid motion vector prediction for interlaced forward-predicted fields |
| US7623574B2 (en) * | 2003-09-07 | 2009-11-24 | Microsoft Corporation | Selecting between dominant and non-dominant motion vector predictor polarities |
| US7599438B2 (en) | 2003-09-07 | 2009-10-06 | Microsoft Corporation | Motion vector block pattern coding and decoding |
| US8064520B2 (en) | 2003-09-07 | 2011-11-22 | Microsoft Corporation | Advanced bi-directional predictive coding of interlaced video |
| US8085844B2 (en) * | 2003-09-07 | 2011-12-27 | Microsoft Corporation | Signaling reference frame distances |
| US7567617B2 (en) | 2003-09-07 | 2009-07-28 | Microsoft Corporation | Predicting motion vectors for fields of forward-predicted interlaced video frames |
| US7620106B2 (en) * | 2003-09-07 | 2009-11-17 | Microsoft Corporation | Joint coding and decoding of a reference field selection and differential motion vector information |
| US7577198B2 (en) | 2003-09-07 | 2009-08-18 | Microsoft Corporation | Number of reference fields for an interlaced forward-predicted field |
| US7724827B2 (en) | 2003-09-07 | 2010-05-25 | Microsoft Corporation | Multi-layer run level encoding and decoding |
| FR2860678A1 (fr) * | 2003-10-01 | 2005-04-08 | Thomson Licensing Sa | Procede de codage differentiel |
| US7400681B2 (en) * | 2003-11-28 | 2008-07-15 | Scientific-Atlanta, Inc. | Low-complexity motion vector prediction for video codec with two lists of reference pictures |
| CN1321534C (zh) * | 2003-12-31 | 2007-06-13 | 中国科学院计算技术研究所 | 固定参考帧数编码方式下获取图像参考块的方法 |
| CN1225128C (zh) * | 2003-12-31 | 2005-10-26 | 中国科学院计算技术研究所 | 直接编码模式下确定参考图像块的方法 |
| US8036271B2 (en) * | 2004-02-24 | 2011-10-11 | Lsi Corporation | Method and apparatus for determining a second picture for temporal direct-mode block prediction |
| KR100584603B1 (ko) * | 2004-08-03 | 2006-05-30 | 학교법인 대양학원 | 다시점 영상의 다이렉트 모드 움직임 예측 방법 및 장치 |
| JP5046335B2 (ja) * | 2004-11-04 | 2012-10-10 | トムソン ライセンシング | ビデオ符号器におけるbフレームの高速モード決定のための方法および装置 |
| US8634413B2 (en) | 2004-12-30 | 2014-01-21 | Microsoft Corporation | Use of frame caching to improve packet loss recovery |
| JP2006352238A (ja) * | 2005-06-13 | 2006-12-28 | Sony Corp | 画像処理装置、画像処理方法及びプログラム |
| KR100746006B1 (ko) * | 2005-07-19 | 2007-08-06 | 삼성전자주식회사 | 계층적 구조에 적합하게 시간적 다이렉트 모드로인코딩하며, 디코딩하는 방법 및 장치 |
| JP2007028393A (ja) * | 2005-07-20 | 2007-02-01 | Matsushita Electric Ind Co Ltd | 双方向予測符号化ピクチャの直接モードブロックの動きベクトルを求める方法 |
| US8498520B2 (en) * | 2005-07-27 | 2013-07-30 | Vbrick Systems, Inc. | Video encoding and transmission technique for efficient, multi-speed fast forward and reverse playback |
| FR2891685B1 (fr) * | 2005-10-03 | 2008-04-18 | Envivio France Entpr Uniperson | Procede et dispositif d'estimation de mouvement a references multiples, procede et dispositif de codage, produits programme d'ordinateur et moyens de stockage correspondants. |
| JP4702943B2 (ja) * | 2005-10-19 | 2011-06-15 | キヤノン株式会社 | 画像処理装置及びその方法 |
| JP4879558B2 (ja) * | 2005-11-02 | 2012-02-22 | パナソニック株式会社 | 動きベクトル検出装置 |
| JP5020829B2 (ja) * | 2005-12-27 | 2012-09-05 | シャープ株式会社 | 動画像復号装置および動画像符号化装置 |
| EP1806930A1 (de) * | 2006-01-10 | 2007-07-11 | Thomson Licensing | Verfahren und Einrichtung für scalierbares Video-referenzbild Aufbau. |
| US20070171977A1 (en) * | 2006-01-25 | 2007-07-26 | Shintaro Kudo | Moving picture coding method and moving picture coding device |
| FR2897213A1 (fr) * | 2006-02-08 | 2007-08-10 | Thomson Licensing Sas | Procede de codage par blocs d'images d'une sequence d'images video |
| JP4527677B2 (ja) | 2006-03-15 | 2010-08-18 | 富士通株式会社 | 動画像符号化方法、動画像符号化装置、動画像符号化プログラム |
| JP5155157B2 (ja) * | 2006-05-12 | 2013-02-27 | パナソニック株式会社 | 動画像復号化装置 |
| BRPI0718206B1 (pt) * | 2006-10-16 | 2020-10-27 | Nokia Technologies Oy | método para codificar uma pluralidade de visões de uma cena; método de codificação de uma sequência de bits de vídeo codificada e aparelho |
| CN101227601B (zh) * | 2007-01-15 | 2011-09-14 | 飞思卡尔半导体公司 | 在视频再现中进行几何变换的方法和设备 |
| KR100955396B1 (ko) | 2007-06-15 | 2010-04-29 | 성균관대학교산학협력단 | 양-예측 부호화 방법 및 장치, 양-예측 복호화 방법 및장치 및 기록매체 |
| WO2008153262A1 (en) * | 2007-06-15 | 2008-12-18 | Sungkyunkwan University Foundation For Corporate Collaboration | Bi-prediction coding method and apparatus, bi-prediction decoding method and apparatus, and recording midium |
| US8254455B2 (en) | 2007-06-30 | 2012-08-28 | Microsoft Corporation | Computing collocated macroblock information for direct mode macroblocks |
| CN101119493B (zh) * | 2007-08-30 | 2010-12-01 | 威盛电子股份有限公司 | 区块式数字编码图像的译码方法及装置 |
| CN101822056B (zh) * | 2007-10-12 | 2013-01-02 | 汤姆逊许可公司 | 用于视频编解码几何划分的双向预测模式划分的方法和装置 |
| US8743952B2 (en) * | 2007-12-18 | 2014-06-03 | Vixs Systems, Inc | Direct mode module with motion flag precoding and methods for use therewith |
| KR101505195B1 (ko) | 2008-02-20 | 2015-03-24 | 삼성전자주식회사 | 직접 모드 부호화 및 복호화 방법 |
| WO2009148412A1 (en) * | 2008-06-06 | 2009-12-10 | Agency For Science, Technology And Research | Methods and devices for estimating motion in a plurality of frames |
| JP5578775B2 (ja) | 2008-09-02 | 2014-08-27 | 富士通株式会社 | 符号化装置および復号装置 |
| CN102160382A (zh) * | 2008-09-24 | 2011-08-17 | 索尼公司 | 图像处理设备和图像处理方法 |
| US8189666B2 (en) | 2009-02-02 | 2012-05-29 | Microsoft Corporation | Local picture identifier and computation of co-located information |
| TWI405469B (zh) * | 2009-02-20 | 2013-08-11 | Sony Corp | Image processing apparatus and method |
| CN103888778B (zh) * | 2009-06-18 | 2017-12-08 | 株式会社东芝 | 运动图像解码装置 |
| HRP20231396T1 (hr) | 2009-06-18 | 2024-05-10 | Kabushiki Kaisha Toshiba | Video kodiranje |
| CN103826127B (zh) * | 2009-06-18 | 2017-03-01 | 株式会社东芝 | 运动图像编码装置和运动图像编码方法 |
| ES3058729T3 (en) | 2009-06-18 | 2026-03-12 | Toshiba Kk | Video encoding |
| CN103826126B (zh) * | 2009-06-18 | 2017-09-29 | 株式会社东芝 | 运动图像编码装置和运动图像编码方法 |
| KR20110008653A (ko) * | 2009-07-20 | 2011-01-27 | 삼성전자주식회사 | 움직임 벡터 예측 방법과 이를 이용한 영상 부호화/복호화 장치 및 방법 |
| US9060176B2 (en) * | 2009-10-01 | 2015-06-16 | Ntt Docomo, Inc. | Motion vector prediction in video coding |
| US8594200B2 (en) | 2009-11-11 | 2013-11-26 | Mediatek Inc. | Method of storing motion vector information and video decoding apparatus |
| WO2011070730A1 (ja) * | 2009-12-07 | 2011-06-16 | 日本電気株式会社 | 映像符号化装置および映像復号装置 |
| KR101348613B1 (ko) | 2009-12-23 | 2014-01-10 | 한국전자통신연구원 | 영상의 부호화/복호화 장치 및 그 방법 |
| KR101522850B1 (ko) * | 2010-01-14 | 2015-05-26 | 삼성전자주식회사 | 움직임 벡터를 부호화, 복호화하는 방법 및 장치 |
| JP5368631B2 (ja) | 2010-04-08 | 2013-12-18 | 株式会社東芝 | 画像符号化方法、装置、及びプログラム |
| KR101752418B1 (ko) | 2010-04-09 | 2017-06-29 | 엘지전자 주식회사 | 비디오 신호 처리 방법 및 장치 |
| KR101782929B1 (ko) * | 2010-05-26 | 2017-09-28 | 엘지전자 주식회사 | 비디오 신호의 처리 방법 및 장치 |
| WO2011155171A1 (ja) * | 2010-06-09 | 2011-12-15 | 株式会社Jvcケンウッド | 動画像符号化装置、動画像符号化方法及び動画像符号化プログラム、ならびに動画像復号装置、動画像復号方法及び動画像復号プログラム |
| JP2011259229A (ja) * | 2010-06-09 | 2011-12-22 | Jvc Kenwood Corp | 動画像符号化装置、動画像符号化方法及び動画像符号化プログラム |
| JP2011259230A (ja) * | 2010-06-09 | 2011-12-22 | Jvc Kenwood Corp | 動画像復号装置、動画像復号方法及び動画像復号プログラム |
| US9124898B2 (en) * | 2010-07-12 | 2015-09-01 | Mediatek Inc. | Method and apparatus of temporal motion vector prediction |
| KR20120016991A (ko) * | 2010-08-17 | 2012-02-27 | 오수미 | 인터 프리딕션 방법 |
| CN106713931B (zh) * | 2010-09-30 | 2019-09-03 | 三菱电机株式会社 | 运动图像编码装置及其方法、运动图像解码装置及其方法 |
| EP3637778B1 (de) * | 2010-10-06 | 2024-07-03 | Ntt Docomo, Inc. | Verfahren zur biprädiktiven bilddekodierung |
| JP5755243B2 (ja) * | 2010-11-24 | 2015-07-29 | パナソニック インテレクチュアル プロパティ コーポレーション オブアメリカPanasonic Intellectual Property Corporation of America | 動きベクトル導出方法および動きベクトル導出装置 |
| US9137544B2 (en) * | 2010-11-29 | 2015-09-15 | Mediatek Inc. | Method and apparatus for derivation of mv/mvp candidate for inter/skip/merge modes |
| US8711940B2 (en) | 2010-11-29 | 2014-04-29 | Mediatek Inc. | Method and apparatus of motion vector prediction with extended motion vector predictor |
| WO2012073481A1 (ja) * | 2010-11-29 | 2012-06-07 | パナソニック株式会社 | 動画像符号化方法および動画像復号化方法 |
| WO2012091519A1 (ko) * | 2010-12-31 | 2012-07-05 | 한국전자통신연구원 | 영상 정보 부호화 방법 및 복호화 방법과 이를 이용한 장치 |
| KR101913086B1 (ko) * | 2011-01-12 | 2018-10-29 | 선 페이턴트 트러스트 | 동화상 부호화 방법 및 동화상 복호화 방법 |
| SG189843A1 (en) * | 2011-01-19 | 2013-06-28 | Mediatek Inc | Method and apparatus for parsing error robustness of temporal motion vector prediction |
| US9749657B2 (en) * | 2011-01-21 | 2017-08-29 | Sharp Kabushiki Kaisha | Buffer compression for motion vector competition |
| US9008181B2 (en) | 2011-01-24 | 2015-04-14 | Qualcomm Incorporated | Single reference picture list utilization for interprediction video coding |
| WO2012102021A1 (ja) * | 2011-01-25 | 2012-08-02 | パナソニック株式会社 | 動画像符号化方法および動画像復号化方法 |
| ES2398095B1 (es) * | 2011-01-31 | 2014-01-27 | Universidad Politécnica De Valencia | Instalación para simular las condiciones de presión y temperatura del aire aspirado por un motor de combustión interna alternativo. |
| KR20120095814A (ko) * | 2011-02-21 | 2012-08-29 | 한밭대학교 산학협력단 | 복수 참조 영상을 이용한 영상 부복호화 방법 및 이러한 방법을 사용하는 장치 |
| WO2012114694A1 (ja) * | 2011-02-22 | 2012-08-30 | パナソニック株式会社 | 動画像符号化方法、動画像符号化装置、動画像復号方法、および、動画像復号装置 |
| US10171813B2 (en) | 2011-02-24 | 2019-01-01 | Qualcomm Incorporated | Hierarchy of motion prediction video blocks |
| WO2012117728A1 (ja) | 2011-03-03 | 2012-09-07 | パナソニック株式会社 | 動画像符号化方法、動画像復号方法、動画像符号化装置、動画像復号装置、及び動画像符号化復号装置 |
| US9288501B2 (en) | 2011-03-08 | 2016-03-15 | Qualcomm Incorporated | Motion vector predictors (MVPs) for bi-predictive inter mode in video coding |
| AU2011361644A1 (en) | 2011-03-09 | 2013-09-19 | Kabushiki Kaisha Toshiba | Image encoding method and image decoding method |
| KR101532665B1 (ko) * | 2011-03-14 | 2015-07-09 | 미디어텍 인크. | 시간적 움직임 백터 예측을 도출하기 위한 방법 및 장치 |
| RU2719308C2 (ru) | 2011-04-12 | 2020-04-17 | Сан Пэтент Траст | Способ кодирования движущихся изображений, устройство кодирования движущихся изображений, способ декодирования движущихся изображений, устройство декодирования движущихся изображений и устройство кодирования и декодирования движущихся изображений |
| ES2673180T3 (es) | 2011-05-24 | 2018-06-20 | Velos Media International Limited | Procedimiento de codificación de imágenes, aparato de codificación de imágenes, procedimiento de decodificación de imágenes, aparato de decodificación de imágenes y aparato de codificación/decodificación de imágenes |
| US9485518B2 (en) | 2011-05-27 | 2016-11-01 | Sun Patent Trust | Decoding method and apparatus with candidate motion vectors |
| BR112013027344B1 (pt) * | 2011-05-27 | 2022-05-10 | Sun Patent Trust | Método de codificação de imagem, aparelho de codificação de imagem, método de decodificação de imagem, aparelho de decodificação de imagem, e aparelho de codificação e decodificação de imagem |
| SG194746A1 (en) | 2011-05-31 | 2013-12-30 | Kaba Gmbh | Image encoding method, image encoding device, image decoding method, image decoding device, and image encoding/decoding device |
| KR101889582B1 (ko) | 2011-05-31 | 2018-08-20 | 선 페이턴트 트러스트 | 동화상 부호화 방법, 동화상 부호화 장치, 동화상 복호화 방법, 동화상 복호화 장치, 및, 동화상 부호화 복호화 장치 |
| TWI530161B (zh) * | 2011-06-07 | 2016-04-11 | Sony Corp | Image processing apparatus and method |
| US9131239B2 (en) * | 2011-06-20 | 2015-09-08 | Qualcomm Incorporated | Unified merge mode and adaptive motion vector prediction mode candidates selection |
| WO2012177052A2 (ko) | 2011-06-21 | 2012-12-27 | 한국전자통신연구원 | 인터 예측 방법 및 그 장치 |
| KR20120140592A (ko) | 2011-06-21 | 2012-12-31 | 한국전자통신연구원 | 움직임 보상의 계산 복잡도 감소 및 부호화 효율을 증가시키는 방법 및 장치 |
| ES2883353T3 (es) | 2011-06-28 | 2021-12-07 | Lg Electronics Inc | Método para obtener un predictor de vector de movimiento |
| MY181718A (en) | 2011-06-30 | 2021-01-05 | Sun Patent Trust | Image decoding method, image encoding method, image decoding device, image encoding device, and image encoding/decoding device |
| US9094689B2 (en) * | 2011-07-01 | 2015-07-28 | Google Technology Holdings LLC | Motion vector prediction design simplification |
| MX2014000159A (es) | 2011-07-02 | 2014-02-19 | Samsung Electronics Co Ltd | Metodo y aparato para la codificacion de video, y metodo y aparato para la decodificacion de video acompañada por inter prediccion utilizando imagen co-localizada. |
| US9456214B2 (en) | 2011-08-03 | 2016-09-27 | Sun Patent Trust | Moving picture coding method, moving picture coding apparatus, moving picture decoding method, moving picture decoding apparatus, and moving picture coding and decoding apparatus |
| CN103858428B (zh) | 2011-10-19 | 2018-07-03 | 太阳专利托管公司 | 图像编码方法、图像编码装置、图像解码方法及图像解码装置 |
| CN103999468A (zh) | 2011-10-21 | 2014-08-20 | 诺基亚公司 | 用于视频编码的方法和装置 |
| TWI552577B (zh) | 2011-10-31 | 2016-10-01 | Jvc Kenwood Corp | Motion picture decoding device, dynamic image decoding method, and dynamic image decoding program product |
| CN104041041B (zh) | 2011-11-04 | 2017-09-01 | 谷歌技术控股有限责任公司 | 用于非均匀运动向量栅格的运动向量缩放 |
| CN107493474B (zh) | 2011-11-08 | 2021-01-12 | 株式会社Kt | 利用解码装置对视频信号进行解码的方法 |
| SG10201502731VA (en) | 2011-11-08 | 2015-05-28 | Samsung Electronics Co Ltd | Method and apparatus for motion vector determination in video encoding or decoding |
| RU2636688C1 (ru) | 2011-12-16 | 2017-11-27 | ДжейВиСи КЕНВУД КОРПОРЕЙШН | Устройство и способ декодирования движущегося изображения, долговременный считываемый компьютером носитель записи, на который записана программа декодирования изображения |
| WO2013088697A1 (ja) | 2011-12-16 | 2013-06-20 | パナソニック株式会社 | 動画像符号化方法、動画像符号化装置、動画像復号方法、動画像復号装置、および動画像符号化復号装置 |
| WO2013094960A1 (ko) | 2011-12-23 | 2013-06-27 | 한국전자통신연구원 | 시간적 머징 후보의 참조 픽쳐 인덱스 설정 방법 및 장치 |
| CN103348678B (zh) * | 2012-02-07 | 2017-06-27 | 松下知识产权经营株式会社 | 图像处理装置以及图像处理方法 |
| US9426463B2 (en) | 2012-02-08 | 2016-08-23 | Qualcomm Incorporated | Restriction of prediction units in B slices to uni-directional inter prediction |
| US9451277B2 (en) | 2012-02-08 | 2016-09-20 | Qualcomm Incorporated | Restriction of prediction units in B slices to uni-directional inter prediction |
| DK3833023T3 (da) | 2012-04-12 | 2022-04-19 | Jvckenwood Corp | Fusionskandidatlistekonstruktion |
| WO2013157791A1 (ko) * | 2012-04-15 | 2013-10-24 | 삼성전자 주식회사 | 인터 예측의 참조영상을 결정하는 방법과 그 장치 |
| US9172970B1 (en) | 2012-05-29 | 2015-10-27 | Google Inc. | Inter frame candidate selection for a video encoder |
| US11317101B2 (en) | 2012-06-12 | 2022-04-26 | Google Inc. | Inter frame candidate selection for a video encoder |
| US9672584B2 (en) * | 2012-09-06 | 2017-06-06 | Imagination Technologies Limited | Systems and methods of partial frame buffer updating |
| US9503746B2 (en) | 2012-10-08 | 2016-11-22 | Google Inc. | Determine reference motion vectors |
| US9485515B2 (en) | 2013-08-23 | 2016-11-01 | Google Inc. | Video coding using reference motion vectors |
| US9628790B1 (en) | 2013-01-03 | 2017-04-18 | Google Inc. | Adaptive composite intra prediction for image and video compression |
| JP6032367B2 (ja) * | 2013-07-16 | 2016-11-24 | 富士通株式会社 | 動画像符号化装置、動画像符号化方法及び動画像復号装置ならびに動画像復号方法 |
| US9609343B1 (en) | 2013-12-20 | 2017-03-28 | Google Inc. | Video coding using compound prediction |
| WO2015172348A1 (en) * | 2014-05-15 | 2015-11-19 | The Procter & Gamble Company | Dentifrice compositions having dental plaque mitigation or improved fluoride uptake |
| RU2615677C1 (ru) * | 2015-10-30 | 2017-04-06 | Кабусики Кайся Тосиба | Способ кодирования изображений и способ декодирования изображений |
| CN106658019B (zh) * | 2015-10-31 | 2019-11-12 | 华为技术有限公司 | 参考帧编解码的方法与装置 |
| CN117061736A (zh) | 2017-01-13 | 2023-11-14 | 谷歌有限责任公司 | 视频代码化的复合预测 |
| US10412410B2 (en) | 2017-08-14 | 2019-09-10 | Google Llc | Compound motion-compensated prediction |
| US10284869B2 (en) | 2017-09-28 | 2019-05-07 | Google Llc | Constrained motion field estimation for hardware efficiency |
| US10880573B2 (en) | 2017-08-15 | 2020-12-29 | Google Llc | Dynamic motion vector referencing for video coding |
| RU2666275C1 (ru) * | 2017-11-13 | 2018-09-06 | ДжейВиСи КЕНВУД КОРПОРЕЙШН | Устройство и способ кодирования движущегося изображения, долговременный считываемый компьютером носитель записи, на который записана программа кодирования изображения |
| US10779002B2 (en) * | 2018-04-17 | 2020-09-15 | Qualcomm Incorporated | Limitation of the MVP derivation based on decoder-side motion vector derivation |
| CN108985279B (zh) * | 2018-08-28 | 2020-11-03 | 上海仁童电子科技有限公司 | 多功能车辆总线mvb波形的故障诊断方法及装置 |
| WO2020140242A1 (zh) * | 2019-01-03 | 2020-07-09 | 北京大学 | 视频处理方法和装置 |
| KR102230265B1 (ko) * | 2019-07-01 | 2021-03-19 | 삼성전자주식회사 | 주변 움직임 정보를 이용하여 움직임 정보를 부호화 및 복호화하는 장치, 및 방법 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US136461A (en) * | 1873-03-04 | Improvement in sash-balances | ||
| TW224553B (en) | 1993-03-01 | 1994-06-01 | Sony Co Ltd | Method and apparatus for inverse discrete consine transform and coding/decoding of moving picture |
| SE519541C2 (sv) | 1996-10-02 | 2003-03-11 | Ericsson Telefon Ab L M | Förfarande och anordning för transformering av en reell digital bredbandig bandpassignal till en uppsättning digitala basbandssignaler med I- och Q-komponenter |
| US6542642B2 (en) * | 1996-02-29 | 2003-04-01 | Canon Kabushiki Kaisha | Image coding process and motion detecting process using bidirectional prediction |
| CN1297147C (zh) * | 1997-03-07 | 2007-01-24 | 通用仪器公司 | 对交错数字视频的双向预测的视频目标平面的预测和编码 |
| US5991447A (en) | 1997-03-07 | 1999-11-23 | General Instrument Corporation | Prediction and coding of bi-directionally predicted video object planes for interlaced digital video |
| US6404813B1 (en) * | 1997-03-27 | 2002-06-11 | At&T Corp. | Bidirectionally predicted pictures or video object planes for efficient and flexible video coding |
| KR100252342B1 (ko) | 1997-08-12 | 2000-04-15 | 전주범 | 움직임 벡터 부호화 방법 및 그 장치 |
| KR100257191B1 (ko) * | 1997-12-31 | 2000-05-15 | 구자홍 | 움직임 벡터 디코더 |
| JPH11215502A (ja) | 1998-01-27 | 1999-08-06 | Sanyo Electric Co Ltd | 動きベクトル検出装置及び方法 |
| KR100280871B1 (ko) | 1998-07-13 | 2001-03-02 | 김남영 | 커플라인과 슬릿으로 구성된 마이크로 스트립 링 공진기 |
| DE19840735C2 (de) | 1998-09-07 | 2001-06-07 | Bosch Gmbh Robert | Blockbasierte Bewegungsschätzung bei der Bewegtbildkodierung |
| EP1142343A1 (de) * | 1999-10-29 | 2001-10-10 | Koninklijke Philips Electronics N.V. | Verfahren zur videokodierung |
| JP2003522486A (ja) * | 2000-02-01 | 2003-07-22 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | Pフレームに対する2ステップ動き推定を伴なうビデオ符号化 |
| US6446118B1 (en) | 2000-02-29 | 2002-09-03 | Designtech International, Inc. | E-mail notification device |
| KR100708091B1 (ko) * | 2000-06-13 | 2007-04-16 | 삼성전자주식회사 | 양방향 움직임 벡터를 이용한 프레임 레이트 변환 장치 및그 방법 |
| RU2182727C2 (ru) | 2000-07-20 | 2002-05-20 | Дворкович Александр Викторович | Способ поиска векторов движения деталей в динамических изображениях |
| US6834293B2 (en) * | 2001-06-15 | 2004-12-21 | Hitachi, Ltd. | Vector scaling system for G.728 annex G |
| US20030099294A1 (en) * | 2001-11-27 | 2003-05-29 | Limin Wang | Picture level adaptive frame/field coding for digital video content |
| US7003035B2 (en) * | 2002-01-25 | 2006-02-21 | Microsoft Corporation | Video coding methods and apparatuses |
| JP2004088722A (ja) * | 2002-03-04 | 2004-03-18 | Matsushita Electric Ind Co Ltd | 動画像符号化方法および動画像復号化方法 |
| US7321626B2 (en) * | 2002-03-08 | 2008-01-22 | Sharp Laboratories Of America, Inc. | System and method for predictive motion estimation using a global motion predictor |
| KR20040099100A (ko) * | 2002-04-19 | 2004-11-26 | 마쯔시다덴기산교 가부시키가이샤 | 움직임 벡터 계산 방법 |
| JP2004208258A (ja) | 2002-04-19 | 2004-07-22 | Matsushita Electric Ind Co Ltd | 動きベクトル計算方法 |
| US20040001546A1 (en) * | 2002-06-03 | 2004-01-01 | Alexandros Tourapis | Spatiotemporal prediction for bidirectionally predictive (B) pictures and motion vector prediction for multi-picture reference motion compensation |
| US7515634B2 (en) | 2002-06-28 | 2009-04-07 | Qualcomm Incorporated | Computationally constrained video encoding |
| EP1422946A4 (de) * | 2002-07-26 | 2008-04-02 | Matsushita Electric Industrial Co Ltd | Codierungsverfahren für bewegliche bilder, decodierungsverfahren für bewegliche bilder und aufzeichnungsmedium |
| KR100506864B1 (ko) * | 2002-10-04 | 2005-08-05 | 엘지전자 주식회사 | 모션벡터 결정방법 |
| US7463686B2 (en) * | 2002-10-16 | 2008-12-09 | Lg Electronics Inc. | Method for determining motion vector and macroblock type |
| DE10311497B3 (de) | 2003-03-15 | 2004-10-07 | Atlas Elektronik Gmbh | Verfahren zur synthetischen Generierung von Sonardaten |
| US7523330B2 (en) * | 2004-06-30 | 2009-04-21 | Sun Microsystems, Inc. | Thread-based clock enabling in a multi-threaded processor |
-
2002
- 2002-11-15 KR KR10-2002-0071226A patent/KR100506864B1/ko not_active Expired - Lifetime
-
2003
- 2003-01-06 US US10/338,283 patent/US7233621B2/en not_active Expired - Lifetime
- 2003-01-07 PT PT07003015T patent/PT1821547E/pt unknown
- 2003-01-07 PT PT08016895T patent/PT2009928E/pt unknown
- 2003-01-07 AT AT07003015T patent/ATE488097T1/de active
- 2003-01-07 DE DE2003221473 patent/DE20321473U1/de not_active Expired - Lifetime
- 2003-01-07 DE DE60335046T patent/DE60335046D1/de not_active Expired - Lifetime
- 2003-01-07 EP EP20070003014 patent/EP1809048B1/de not_active Expired - Lifetime
- 2003-01-07 DE DE60334941T patent/DE60334941D1/de not_active Expired - Lifetime
- 2003-01-07 PT PT05018606T patent/PT1603344E/pt unknown
- 2003-01-07 DK DK07003014T patent/DK1809048T3/da active
- 2003-01-07 DE DE60335034T patent/DE60335034D1/de not_active Expired - Lifetime
- 2003-01-07 AT AT08016893T patent/ATE482574T1/de active
- 2003-01-07 AT AT08016895T patent/ATE482575T1/de active
- 2003-01-07 PT PT07003014T patent/PT1809048E/pt unknown
- 2003-01-07 EP EP20080016892 patent/EP2009926B1/de not_active Expired - Lifetime
- 2003-01-07 AT AT08016890T patent/ATE482572T1/de active
- 2003-01-07 GB GB0426713A patent/GB2406460B/en not_active Expired - Lifetime
- 2003-01-07 AT AT03000209T patent/ATE354259T1/de active
- 2003-01-07 SI SI200331919T patent/SI2003900T1/sl unknown
- 2003-01-07 GB GB0426712A patent/GB2406459B/en not_active Expired - Lifetime
- 2003-01-07 AT AT07003016T patent/ATE488964T1/de active
- 2003-01-07 EP EP20090000888 patent/EP2046060B1/de not_active Expired - Lifetime
- 2003-01-07 SI SI200331947T patent/SI1796396T1/sl unknown
- 2003-01-07 AT AT08016888T patent/ATE484156T1/de active
- 2003-01-07 AT AT05018606T patent/ATE488963T1/de active
- 2003-01-07 EP EP20070003015 patent/EP1821547B1/de not_active Expired - Lifetime
- 2003-01-07 EP EP20080016894 patent/EP2015586B1/de not_active Expired - Lifetime
- 2003-01-07 DK DK08016895T patent/DK2009928T3/da active
- 2003-01-07 DE DE60334339T patent/DE60334339D1/de not_active Expired - Lifetime
- 2003-01-07 SI SI200331914T patent/SI1809048T1/sl unknown
- 2003-01-07 DK DK08016893T patent/DK2009927T3/da active
- 2003-01-07 EP EP20080016891 patent/EP2003900B1/de not_active Expired - Lifetime
- 2003-01-07 EP EP20090000886 patent/EP2046058B1/de not_active Expired - Lifetime
- 2003-01-07 SI SI200331923T patent/SI2015585T1/sl unknown
- 2003-01-07 PT PT08016890T patent/PT2003899E/pt unknown
- 2003-01-07 DK DK08016888T patent/DK2015585T3/da active
- 2003-01-07 AT AT07003014T patent/ATE482571T1/de active
- 2003-01-07 DK DK07003016T patent/DK1796396T3/da active
- 2003-01-07 EP EP20090000885 patent/EP2046057B1/de not_active Expired - Lifetime
- 2003-01-07 GB GB0300288A patent/GB2393873B/en not_active Expired - Lifetime
- 2003-01-07 DK DK08016890T patent/DK2003899T3/da active
- 2003-01-07 DK DK07003015T patent/DK1821547T3/da active
- 2003-01-07 AT AT08016891T patent/ATE482573T1/de active
- 2003-01-07 EP EP20090000883 patent/EP2046055A3/de not_active Ceased
- 2003-01-07 EP EP20030000209 patent/EP1406453B1/de not_active Expired - Lifetime
- 2003-01-07 SI SI200331908T patent/SI2003899T1/sl unknown
- 2003-01-07 PT PT03000209T patent/PT1406453E/pt unknown
- 2003-01-07 DE DE2003611720 patent/DE60311720T9/de active Active
- 2003-01-07 DK DK05018606T patent/DK1603344T3/da active
- 2003-01-07 DE DE60334338T patent/DE60334338D1/de not_active Expired - Lifetime
- 2003-01-07 DE DE60334336T patent/DE60334336D1/de not_active Expired - Lifetime
- 2003-01-07 SI SI200331943T patent/SI1603344T1/sl unknown
- 2003-01-07 PT PT08016888T patent/PT2015585E/pt unknown
- 2003-01-07 DE DE60334505T patent/DE60334505D1/de not_active Expired - Lifetime
- 2003-01-07 GB GB0513436A patent/GB2413721B/en not_active Expired - Lifetime
- 2003-01-07 SI SI200331918T patent/SI2009927T1/sl unknown
- 2003-01-07 DK DK03000209T patent/DK1406453T3/da active
- 2003-01-07 EP EP20090000866 patent/EP2059054B1/de not_active Expired - Lifetime
- 2003-01-07 EP EP20080016888 patent/EP2015585B1/de not_active Expired - Lifetime
- 2003-01-07 DK DK08016891T patent/DK2003900T3/da active
- 2003-01-07 PT PT08016891T patent/PT2003900E/pt unknown
- 2003-01-07 EP EP20070003016 patent/EP1796396B8/de not_active Expired - Lifetime
- 2003-01-07 EP EP20050018606 patent/EP1603344B1/de not_active Expired - Lifetime
- 2003-01-07 SI SI200331917T patent/SI2009928T1/sl unknown
- 2003-01-07 EP EP20080016889 patent/EP2009925B1/de not_active Expired - Lifetime
- 2003-01-07 ES ES03000209T patent/ES2281573T3/es not_active Expired - Lifetime
- 2003-01-07 EP EP20090000865 patent/EP2046054B1/de not_active Expired - Lifetime
- 2003-01-07 SI SI200330780T patent/SI1406453T1/sl unknown
- 2003-01-07 PT PT07003016T patent/PT1796396E/pt unknown
- 2003-01-07 DE DE60334330T patent/DE60334330D1/de not_active Expired - Lifetime
- 2003-01-07 EP EP20080016893 patent/EP2009927B1/de not_active Expired - Lifetime
- 2003-01-07 EP EP20090000887 patent/EP2046059B1/de not_active Expired - Lifetime
- 2003-01-07 PT PT08016893T patent/PT2009927E/pt unknown
- 2003-01-07 DE DE60334337T patent/DE60334337D1/de not_active Expired - Lifetime
- 2003-01-07 EP EP20090000884 patent/EP2046056B1/de not_active Expired - Lifetime
- 2003-01-07 EP EP20080016890 patent/EP2003899B1/de not_active Expired - Lifetime
- 2003-01-07 SI SI200331939T patent/SI1821547T1/sl unknown
- 2003-01-07 EP EP20080016895 patent/EP2009928B1/de not_active Expired - Lifetime
- 2003-01-08 JP JP2003002599A patent/JP4020789B2/ja not_active Expired - Lifetime
- 2003-01-09 DE DE2003162106 patent/DE10362106B3/de not_active Expired - Lifetime
- 2003-01-09 DE DE2003100533 patent/DE10300533B4/de not_active Expired - Lifetime
- 2003-01-09 NL NL1022333A patent/NL1022333C2/nl not_active IP Right Cessation
- 2003-01-10 CN CN2005100488533A patent/CN1812585B/zh not_active Expired - Lifetime
- 2003-01-10 CN CNB2005100488548A patent/CN100473170C/zh not_active Expired - Lifetime
- 2003-01-10 CN CNB031016235A patent/CN1269361C/zh not_active Expired - Lifetime
-
2005
- 2005-01-28 US US11/044,004 patent/US7627035B2/en not_active Expired - Lifetime
- 2005-01-28 US US11/044,001 patent/US7570691B2/en not_active Expired - Lifetime
- 2005-01-28 US US11/044,002 patent/US7606307B2/en not_active Expired - Lifetime
- 2005-07-11 NL NL1029485A patent/NL1029485C2/nl not_active IP Right Cessation
- 2005-07-11 NL NL1029486A patent/NL1029486C2/nl not_active IP Right Cessation
-
2006
- 2006-01-19 JP JP2006011202A patent/JP4216852B2/ja not_active Expired - Lifetime
-
2007
- 2007-03-01 CY CY20071100300T patent/CY1106351T1/el unknown
- 2007-10-09 US US11/907,078 patent/US8351504B2/en not_active Expired - Fee Related
- 2007-10-09 US US11/907,079 patent/US7643557B2/en not_active Expired - Lifetime
- 2007-10-09 US US11/907,080 patent/US7634007B2/en not_active Expired - Lifetime
- 2007-10-09 US US11/907,074 patent/US7643556B2/en not_active Expired - Lifetime
- 2007-10-09 US US11/907,076 patent/US8345757B2/en not_active Expired - Fee Related
- 2007-10-09 US US11/907,073 patent/US7558321B2/en not_active Expired - Lifetime
- 2007-10-09 US US11/907,075 patent/US8351503B2/en not_active Expired - Fee Related
-
2008
- 2008-03-11 JP JP2008061567A patent/JP4625104B2/ja not_active Expired - Lifetime
- 2008-03-11 JP JP2008060987A patent/JP2008182742A/ja active Pending
- 2008-03-11 JP JP2008061455A patent/JP2008182747A/ja active Pending
- 2008-03-11 JP JP2008060955A patent/JP4625101B2/ja not_active Expired - Lifetime
- 2008-03-11 JP JP2008061152A patent/JP2008182746A/ja active Pending
- 2008-03-11 JP JP2008061116A patent/JP4709241B2/ja not_active Expired - Lifetime
- 2008-03-11 JP JP2008061096A patent/JP4625103B2/ja not_active Expired - Lifetime
- 2008-03-11 JP JP2008060935A patent/JP2008182738A/ja active Pending
- 2008-03-11 JP JP2008060962A patent/JP4625102B2/ja not_active Expired - Lifetime
- 2008-03-11 JP JP2008060950A patent/JP4625100B2/ja not_active Expired - Lifetime
- 2008-03-11 JP JP2008061142A patent/JP4709242B2/ja not_active Expired - Lifetime
- 2008-10-08 US US12/285,546 patent/US8351505B2/en not_active Expired - Fee Related
- 2008-10-08 US US12/285,553 patent/US8432969B2/en not_active Expired - Fee Related
- 2008-10-08 US US12/285,552 patent/US8422556B2/en not_active Expired - Fee Related
- 2008-10-08 US US12/285,545 patent/US8345758B2/en not_active Expired - Fee Related
- 2008-10-09 US US12/285,627 patent/US8428134B2/en not_active Expired - Fee Related
- 2008-10-09 US US12/285,624 patent/US8351507B2/en not_active Expired - Fee Related
- 2008-10-09 US US12/285,626 patent/US8416853B2/en not_active Expired - Fee Related
- 2008-10-09 US US12/285,628 patent/US8385417B2/en not_active Expired - Fee Related
- 2008-10-10 US US12/285,665 patent/US8416854B2/en not_active Expired - Fee Related
- 2008-10-10 US US12/285,667 patent/US8351506B2/en not_active Expired - Fee Related
- 2008-10-10 US US12/285,668 patent/US8396128B2/en not_active Expired - Fee Related
- 2008-10-10 US US12/285,664 patent/US8411748B2/en not_active Expired - Fee Related
-
2009
- 2009-03-17 JP JP2009065000A patent/JP2009135989A/ja active Pending
- 2009-03-17 JP JP2009064940A patent/JP4625131B2/ja not_active Expired - Lifetime
- 2009-03-17 JP JP2009065130A patent/JP4709292B2/ja not_active Expired - Lifetime
- 2009-03-17 JP JP2009065198A patent/JP2009135994A/ja active Pending
- 2009-03-17 JP JP2009065025A patent/JP4709291B2/ja not_active Expired - Lifetime
- 2009-03-17 JP JP2009065104A patent/JP4625132B2/ja not_active Expired - Lifetime
-
2010
- 2010-12-22 CY CY20101101177T patent/CY1111023T1/el unknown
- 2010-12-22 CY CY20101101182T patent/CY1111027T1/el unknown
- 2010-12-22 CY CY20101101179T patent/CY1111025T1/el unknown
- 2010-12-22 CY CY20101101178T patent/CY1111024T1/el unknown
- 2010-12-22 CY CY20101101181T patent/CY1111026T1/el unknown
-
2011
- 2011-01-04 CY CY20111100014T patent/CY1111077T1/el unknown
- 2011-02-07 CY CY20111100139T patent/CY1111539T1/el unknown
- 2011-02-14 CY CY20111100181T patent/CY1111198T1/el unknown
- 2011-02-14 CY CY20111100180T patent/CY1111204T1/el unknown
-
2013
- 2013-03-26 US US13/850,332 patent/US8638856B2/en not_active Expired - Fee Related
- 2013-12-11 US US14/103,414 patent/US8891624B2/en not_active Expired - Lifetime
- 2013-12-11 US US14/103,393 patent/US8891623B2/en not_active Expired - Lifetime
- 2013-12-11 US US14/103,403 patent/US9042452B2/en not_active Expired - Lifetime
- 2013-12-11 US US14/103,380 patent/US9042451B2/en not_active Expired - Lifetime
- 2013-12-11 US US14/103,450 patent/US9066106B2/en not_active Expired - Lifetime
- 2013-12-11 US US14/103,413 patent/US9042453B2/en not_active Expired - Lifetime
-
2015
- 2015-04-28 US US14/698,410 patent/US9743108B2/en not_active Expired - Fee Related
Non-Patent Citations (1)
| Title |
|---|
| TEXT OF FINAL COMMITTEE DRAFT OF JOINT VIDEO SPECIFICATION (ITU-T REC. H-264 ISOIIEC 14496-10 AVC, July 2002 (2002-07-01) |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1406453B1 (de) | Direkt-Modus Bewegungsvektorberechnung für B-Bilder |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| 17P | Request for examination filed |
Effective date: 20080925 |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 1821547 Country of ref document: EP Kind code of ref document: P Ref document number: 1406453 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT SE SI SK TR |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT SE SI SK TR |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: JEON, BYEONG MOON |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT SE SI SK TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 1406453 Country of ref document: EP Kind code of ref document: P Ref document number: 1821547 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REF | Corresponds to: |
Ref document number: 60334505 Country of ref document: DE Date of ref document: 20101118 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: PT Ref legal event code: SC4A Free format text: AVAILABILITY OF NATIONAL TRANSLATION Effective date: 20101221 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: T3 |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Effective date: 20110301 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: KELLER & PARTNER PATENTANWAELTE AG |
|
| REG | Reference to a national code |
Ref country code: SK Ref legal event code: T3 Ref document number: E 8777 Country of ref document: SK |
|
| REG | Reference to a national code |
Ref country code: HU Ref legal event code: AG4A Ref document number: E010293 Country of ref document: HU |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20110707 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 60334505 Country of ref document: DE Effective date: 20110707 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCAR Free format text: NEW ADDRESS: EIGERSTRASSE 2 POSTFACH, 3000 BERN 14 (CH) |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: GR Ref legal event code: EP Ref document number: 20100403005 Country of ref document: GR Effective date: 20110119 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 15 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 16 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PFA Owner name: LG ELECTRONICS INC., KR Free format text: FORMER OWNER: LG ELECTRONICS INC., KR |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IE Payment date: 20211221 Year of fee payment: 20 Ref country code: LU Payment date: 20211207 Year of fee payment: 20 Ref country code: MC Payment date: 20211207 Year of fee payment: 20 Ref country code: GB Payment date: 20211206 Year of fee payment: 20 Ref country code: FR Payment date: 20211208 Year of fee payment: 20 Ref country code: EE Payment date: 20211207 Year of fee payment: 20 Ref country code: DK Payment date: 20211206 Year of fee payment: 20 Ref country code: FI Payment date: 20211207 Year of fee payment: 20 Ref country code: SE Payment date: 20211207 Year of fee payment: 20 Ref country code: PT Payment date: 20211207 Year of fee payment: 20 Ref country code: SK Payment date: 20211220 Year of fee payment: 20 Ref country code: BG Payment date: 20211208 Year of fee payment: 20 Ref country code: CZ Payment date: 20211221 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GR Payment date: 20211206 Year of fee payment: 20 Ref country code: CH Payment date: 20211206 Year of fee payment: 20 Ref country code: BE Payment date: 20211206 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20211207 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: HU Payment date: 20220207 Year of fee payment: 20 Ref country code: DE Payment date: 20211206 Year of fee payment: 20 Ref country code: AT Payment date: 20211206 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: TR Payment date: 20220103 Year of fee payment: 20 Ref country code: IT Payment date: 20211209 Year of fee payment: 20 Ref country code: ES Payment date: 20220210 Year of fee payment: 20 Ref country code: CY Payment date: 20211210 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SI Payment date: 20211227 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 60334505 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: EUP Expiry date: 20230107 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MK Effective date: 20230106 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MK Effective date: 20230107 |
|
| REG | Reference to a national code |
Ref country code: SK Ref legal event code: MK4A Ref document number: E 8777 Country of ref document: SK Expiry date: 20230107 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20230107 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: PE20 Expiry date: 20230106 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK07 Ref document number: 484156 Country of ref document: AT Kind code of ref document: T Effective date: 20230107 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20230108 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20230410 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20230119 Ref country code: IE Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20230107 Ref country code: ES Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20230108 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20230107 Ref country code: GB Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20230106 |