EP1903418B1 - Device for transforming mechanical movement into electrical signals - Google Patents
Device for transforming mechanical movement into electrical signals Download PDFInfo
- Publication number
- EP1903418B1 EP1903418B1 EP07011747.8A EP07011747A EP1903418B1 EP 1903418 B1 EP1903418 B1 EP 1903418B1 EP 07011747 A EP07011747 A EP 07011747A EP 1903418 B1 EP1903418 B1 EP 1903418B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- control stick
- housing
- signal transmitters
- case
- joystick
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 title claims description 54
- 230000001131 transforming effect Effects 0.000 title claims 2
- 238000004886 process control Methods 0.000 claims description 4
- 238000005192 partition Methods 0.000 claims description 2
- 238000004519 manufacturing process Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 239000000969 carrier Substances 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000005452 bending Methods 0.000 description 1
- 239000000356 contaminant Substances 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000011326 mechanical measurement Methods 0.000 description 1
- 230000009347 mechanical transmission Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G7/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with one single controlled member; Details thereof
- G05G7/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with one single controlled member; Details thereof characterised by special provisions for conveying or converting motion, or for acting at a distance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
- G05G2009/0474—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks characterised by means converting mechanical movement into electric signals
- G05G2009/04748—Position sensor for rotary movement, e.g. potentiometer
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
- G05G2009/0474—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks characterised by means converting mechanical movement into electric signals
- G05G2009/04755—Magnetic sensor, e.g. hall generator, pick-up coil
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
- G05G2009/0474—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks characterised by means converting mechanical movement into electric signals
- G05G2009/04759—Light-sensitive detector, e.g. photoelectric
Definitions
- the invention relates to a device for converting mechanical movements into electrical signals, which serve for process control, according to the preamble of claim 1.
- the magnetically conductive sheet terminates in the region of the respective Hall sensor, so that the movements of the pole pieces, so the changes in the magnetic field upon actuation of the joystick, can be determined by this.
- the thus evaluated magnetic signals are then converted into electrical signals, for example by a microprocessor, and passed on to an electrical unit for their litigation.
- the movements of the joystick can first in changes of a magnetic field and then in electrical signal be converted to litigation. Accordingly, by such a joystick device, control signals can be transmitted to a screen or the like.
- the joystick is tiltably mounted in a housing.
- the housing facing the free end of the joystick is drivingly connected to a variety of mechanical components, such as gears, return springs and mounting shoes connected.
- the movements of the joystick are therefore converted into rotational movements of the gears and in length of the return spring.
- These mechanical components are connected to actuators, through which the rotational movement of the gears and the changes in length of the return springs are measurable.
- the mechanical measurement signals generated in this way can be converted into electrical signals which map the movement changes of the joystick and can be used in corresponding electrical devices for their control.
- the arms connected to the control stick can perform relative movements in the area of the Hall sensors when the control stick is tilted. Also by this conversion device rotational movements or superimpositions of tilting and rotational movements are not transferable to the arms on which the magnets are arranged in the Hall sensors, such rotation or overlay movements can not measure.
- the position of each signal generator is precisely defined in the housing and is subject to any changes during a longer period of operation by force or other shocks. Furthermore, the assignment of the signal generator in the region of the mounted on a printed circuit board receiving sensors is exactly vorappelbar, so that the setting of the field changes or the sensor signal is not subject to unwanted fluctuations even with a longer operating time. Namely, since the distance between the signal transmitters, which are fixedly supported on the drivers and the mounted on the circuit board receiving sensors is maintained constant, the distance between these components remains unchanged after assembly, so that by the one-time adjustment and calibration of the device reliable and accurate operation is possible.
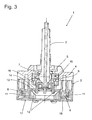
- FIG. 1 For example, a device 1 for converting mechanical movements of a control stick 3 which is tiltable and rotatably mounted in a housing 2 can be taken. By the movements of the joystick 3 electrical signals are to be generated, which serve for a process control, for example on a computer screen, and which are modeled on the visible movement of an arrow or the like.
- a ball 7 is integrally formed on the control stick 3 in the lower region arranged in the housing, which ball acts as a bearing for the control stick 3 in the housing 2.
- the ball 7 of the joystick 3 is thereby encompassed by two guide plates 5 and 6 and held in these rotatable and tiltable.
- the guide plates 5 and 6 are supported on the housing 2 via screws 19 and nuts 21.
- the guide plates 5 and 6 are closed to the outside by a cover 4 and a closure housing 24.
- a bellows not shown, can be pushed onto the closure housing 24.
- the joystick 3 passes through the cover 4 and the end housing 24, so that it is manually accessible from the outside.
- the end housing 24 exerts a restoring force on the control stick 3, by which this is transferred to the starting position.
- a plate 15 is fixedly attached to the ends ending in the housing 2 lower portion of the joystick 3, projecting from the four pins 16.
- the housing 2 has four round recesses 10, in each of which a driver 11 is inserted.
- the carriers 11 are designed to be open in the direction of a printed circuit board 17 accommodated in the housing 2, and in each case a permanent magnet 8 or 9 is inserted in such a way that two adjacent permanent magnets 8 or 9 are poled differently, so that they produce a magnetic field of a different design.
- circuit board 17 On the circuit board 17 are four magnetic sensors, which are constructed as so-called Hall sensors 18, mounted. The position of the respective Hall sensors 18 is associated with the respective permanent magnet 8 or 9, so that the permanent magnets 8 or 9 extend directly above and in alignment with the Hall sensors 18.
- FIGS. 2 to 4 can be seen that in a movement of the joystick 3 in a plane, the driver 11 are changed over the intermediate members 12 in the housing 2 in position, because the drivers 11 are rotatably mounted in the housing 2, so that by a tilting movement and / or a rotation of the joystick 3 a change in position of the respective driver 11 is generated. Due to the rotation and the associated change in angle of the driver 11 relative to the sensors 18, however, the magnetic field generated by the permanent magnets 8 or 9 is also changed directly in the region of the Hall sensors 18. The Hall sensors 18 thus measure the magnetic field changes and pass them on to an electrical evaluation device, which is assigned to the printed circuit board 17, for example a microprocessor or a differently constructed arithmetic unit.
- the magnetic signals of the Hall sensors 18 can be converted into electrical signals in such a way that a movement of an arrow on a screen can be recognized by means of them, or that specific input commands are transmitted and forwarded by the control stick 3.
- a partition plate 34 is inserted, by which the drivers 11 are supported in the housing 2.
- FIG. 4 It is shown that the four pins 16 are movably inserted in the respective elongated hole 14 of the webs 13, so that the respective pins 16 are moved in the oblong holes 14 by the movement of the control stick 3 and thereby a rotational movement of the driver 11 and thus the permanent magnets. 8 or 9 is created. It is conceivable to accommodate only two permanent magnets 8 or 9 in each case two drivers 11. The additional pair of permanent magnets 8 or 9 serve either operational safety when the first pair of permanent magnets 8 and 9 fail or for additional measurements of rotational movements.
- the rotation and / or tilting of the joystick 3 namely that of four drivers 11 are moved in the same direction of rotation; this is detected by the computing and evaluation and converted into corresponding electrical signals. If the joystick 3 additionally or exclusively tilted, each of the tilting movement opposite carriers 11 move in opposite direction of rotation to each other.
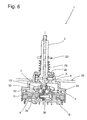
- FIGS. 5 to 7 can be seen that at the housed in the housing 2 free end of the joystick 3, the plate 15 'is fixedly mounted, in which now four guide grooves 33 are incorporated.
- the free end of the control stick 3 are facing, so protrude into the center of the housing 2.
- the free ends of the pins 31 are as Ball head 32 formed and inserted into the respective guide groove 33.
- the respective ball heads 32 can be moved longitudinally displaceably in the guide groove 33, so that the mechanical transmission of the direction of movement of the control stick 3 to the drivers 11 is ensured.
- the width of the guide grooves 33 corresponds to the diameter of the ball heads 32 inserted therein.
- a plurality of electrical lines 36 are provided in the interior of the joystick 3, which are connected to a mounted on the free outwardly projecting end of the joystick control knob 3 or button.
- the electrical signals generated by the rotation of the knob or by the operation of the button are transmitted to the circuit board 17 through the lines 36 and moved from an attached on the circuit board 17 electrical computing unit and converted into electrical signals.
- the exit of the electrical lines 36 from the joystick 3 takes place directly in the interior of the housing 2 and at a small distance to the tilting plane 35 of the joystick 3, so that the electrical lines 36 are advantageously exposed to no large deflecting movements and therefore little mechanical load.
- light-emitting diodes located in the control stick 3 can be actuated via the lines 36.
- the provision of the joystick 3 in a starting position is effected by a patch on the end housing 24 spring 22, which is inserted between the end housing 24 and attached to the control stick 3 stop 23.
- a force which acts on the spring 22 and which is compressed by this arises a force which acts on the spring 22 and which is compressed by this.
- the spring 22 snaps back into its original position and aligns the joystick 3 perpendicular to the housing 2. This corresponds to the starting position of the joystick 3 with respect to the housing 2.
- a plurality of control sticks 3 may be provided in the housing 2, a plurality of control sticks 3 may be provided.
- the Hall sensors 18 or receiving sensors are then arranged on the one circuit board 17, so that such a configuration requires less space and is easy to manufacture.
- intermediate links (12) can cooperate in such a way that an over or under reduction of the movement of the joystick takes place.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Position Input By Displaying (AREA)
- Mechanical Control Devices (AREA)
Description
Die Erfindung bezieht sich auf eine Vorrichtung zur Umwandlung mechanischer Bewegungen in elektrische Signale, die zur Prozesssteuerung dienen, nach dem Oberbegriff des Patentanspruches 1.The invention relates to a device for converting mechanical movements into electrical signals, which serve for process control, according to the preamble of
Aus der
Das magnetisch leitende Blech endet im Bereich des jeweiligen Hall-Sensors, so dass durch diesen die Bewegungen der Polschuhe, also die Änderungen des Magnetfeldes beim Betätigen des Steuerknüppels, ermittelbar ist. Die derart ausgewerteten magnetischen Signale werden anschließend in elektrische Signale, beispielsweise durch einen Mikroprozessor, umgerechnet und an eine elektrische Einheit für deren Prozessführung weitergegeben. Somit können die Bewegungen des Steuerknüppels zunächst in Änderungen eines Magnetfeldes und anschließend in elektrische Signal zur Prozessführung umgewandelt werden. Durch eine solche Joystick-Vorrichtung können demnach Steuersignale auf einen Bildschirm oder dgl. übertragen werden.The magnetically conductive sheet terminates in the region of the respective Hall sensor, so that the movements of the pole pieces, so the changes in the magnetic field upon actuation of the joystick, can be determined by this. The thus evaluated magnetic signals are then converted into electrical signals, for example by a microprocessor, and passed on to an electrical unit for their litigation. Thus, the movements of the joystick can first in changes of a magnetic field and then in electrical signal be converted to litigation. Accordingly, by such a joystick device, control signals can be transmitted to a screen or the like.
Als nachteilig bei diesem Stand der Technik hat sich herausgestellt, dass der Steuerknüppel ausschließlich in einer Ebene bewegt werden kann. Eine solche Bewegung entspricht einer Kippbewegung des Steuerknüppels. Wenn jedoch zusätzliche Informationen durch den Steuerknüppel an die elektrisch betriebene Baugruppe weitergegeben werden sollen, beispielsweise durch einen Drehknopf, sind zusätzliche Leitungen vorzusehen, durch die diese elektrischen Signale an die Leiterplatte und deren Bauteile übertragen werden. Diese Leitungen müssen demnach im Kippwinkelbereich des Steuerknüppels, also im Bereich der Lagerung des Steuerknüppels, verlaufen und unterliegen in diesem Übergangsbereich einer erheblichen Biegebelastung, so dass diese Leitungen oftmals kaputt gehen.A disadvantage of this prior art has been found that the joystick can be moved only in one plane. Such a movement corresponds to a tilting movement of the joystick. However, if additional information to be passed through the joystick to the electrically operated assembly, for example by a knob, additional lines must be provided by which these electrical signals are transmitted to the circuit board and its components. Accordingly, these lines must run in the tilt angle range of the control stick, ie in the region of the mounting of the control stick, and are subject to a considerable bending load in this transition region, so that these lines are often broken.
Darüber hinaus ist der Bauaufwand für eine solche Steuerknüppelvorrichtung äußerst aufwändig, denn die die magnetischen Änderungen übertragenden Profile sind äußerst exakt zu fertigen und einzubauen.In addition, the construction cost of such a joystick device is extremely complex, because the magnetic changes transmitted profiles are extremely accurate to manufacture and install.
Aus der
Als nachteilig bei diesem Stand der Technik hat sich herausgestellt, dass eine Vielzahl von mechanischen Bauteilen zu verwenden ist, deren Herstellung äußerst kostenintensiv ist, denn jedes verwendete mechanische Bauteil, insbesondere die Zahnräder und die Rückstellfeder, sind mit äußerster Präzision zu fertigen. Darüber hinaus ist der Zusammenbau einer solchen Vorrichtung äußerst kostenintensiv, denn jedes einzelne Bauteil ist an die entsprechende Position zu bringen und dort zu fixieren. Dies erfordert einen erheblichen Zeitaufwand; des Weiteren ist diese technische Fertigung mit einer erheblichen optischen Problematik verbunden, denn die äußerst klein bemessenen mechanischen Bauteile können nicht mit dem bloßen Auge positioniert werden, sondern vielmehr sind optische Hilfsmittel, beispielsweise Lupen und dergleichen, erforderlich, um die exakte Positionierung und Montage dieser Kleinteile vornehmen zu können.A disadvantage of this prior art has been found that a variety of mechanical components is used, the production of which is extremely costly, because every mechanical component used, in particular the gears and the return spring, are to be manufactured with extreme precision. In addition, the assembly of such a device is extremely costly, because each component is to be brought to the appropriate position and to fix there. This requires a considerable amount of time; Furthermore, this technical production is associated with a considerable optical problem, because the extremely small sized mechanical components can not be positioned with the naked eye, but rather optical aids, such as magnifying glasses and the like, required to the exact positioning and assembly of these small parts to be able to make.
Des Weiteren hat sich bei der Verwendung solcher mechanischen Umwandlungsvorrichtungen als nachteilig herausgestellt, dass die Bewegungsänderungen des Steuerknüppels nicht exakt durch die mechanischen Bauteile umgewandelt werden, so dass Messungenauigkeiten entstehen, die dazu beitragen, dass die Bewegungen des Steuerknüppels nicht optimal in dem elektrischen Gerät abgebildet werden. Dies führt oftmals zu Bedienungsfehlern und anderen unerwünschten Störungen bei der Bedienung der elektrischen Geräte.Furthermore, it has been found to be disadvantageous in the use of such mechanical conversion devices that the movement changes of the joystick are not accurately converted by the mechanical components, so that measurement inaccuracies arise that help that the movements of the joystick are not optimally imaged in the electrical device , This often leads to operating errors and other undesirable disturbances in the operation of the electrical equipment.
Aus den Druckschriften
Dabei ist aus der
Als nachteilig hat sich dabei herausgestellt, dass die Bewegungen des Steuerknüppels lediglich eindimensional in Bewegungen, nämlich in Linearbewegungen, umgesetzt werden. Folglich können beispielsweise Rotationen des Steuerknüppels nicht in elektrische Schaltsignale umgewandelt werden.A disadvantage has been found that the movements of the joystick only one-dimensional movements, namely in Linear movements, to be implemented. Consequently, for example, rotations of the joystick can not be converted into electrical switching signals.
In der
Aus der
Als Nachteilig bei diesem Stand der Technik hat sich herausgestellt, dass ausschließlich Kippbewegungen des Steuerknüppels aufgrund der konstruktiven Verbindung zwischen diesem und den Sensoren übertragbar sind. Es ist daher Aufgabe der Erfindung, eine Vorrichtung der eingangs genannten Gattung zur Verfügung zu stellen, mittels der sowohl die Kippbewegungen des Steuerknüppels als auch zusätzliche weitere Bewegungen, beispielsweise Drehungen des Steuerknüppels, und zwar auch in dessen gekippten Stelfungen, übertragen zu können. Dabei soll der Bauaufwand gering und die Funktion der Vorrichtung soll zuverlässig und dauerhaft gewährleistet sein.A disadvantage of this prior art has been found that only tilting movements of the joystick are transferable due to the constructive connection between this and the sensors. It is therefore an object of the invention to provide a device of the type mentioned, by means of both the tilting movements of the joystick and additional additional movements, such as rotations of the joystick, even in its tilted Stiefungen to transfer. The construction cost is low and the function of the device should be guaranteed reliable and durable.
Diese Aufgaben werden durch die Merkmale des kennzeichnenden Teils des Patentanspruches 1 gelöst.These objects are achieved by the features of the characterizing part of
Weitere vorteilhafte Weiterbildungen der Erfindung ergeben sich aus den Unteransprüchen.Further advantageous developments of the invention will become apparent from the dependent claims.
Dadurch, dass die Signalgeber mit Mitnehmer verbunden sind, die im Gehäuse drehbar gelagert werden, wird die Position jedes Signalgebers im Gehäuse exakt festgelegt und unterliegt auch während einer längeren Betriebsdauer keinerlei Veränderungen durch Krafteinflüsse oder sonstigen Erschütterungen. Des Weiteren ist die Zuordnung der Signalgeber im Bereich der auf einer Leiterplatte angebrachten Empfangs-Sensoren exakt vornehmbar, so dass die Einstellung der Feldänderungen oder des Sensorsignals auch bei einer längeren Betriebsdauer nicht ungewollten Schwankungen unterliegt. Da nämlich der Abstand zwischen den Signalgebern, die ortsfest an den Mitnehmern abgestützt sind und den auf der Leiterplatte angebrachten Empfangs-Sensoren konstant beibehalten wird, bleibt der Abstand zwischen diesen Bauteilen nach der Montage unverändert, so dass durch die einmalige Einstellung und Kalibrierung der Vorrichtung ein zuverlässiger und exakter Betrieb möglich ist.The fact that the signalers are connected to drivers, which are rotatably mounted in the housing, the position of each signal generator is precisely defined in the housing and is subject to any changes during a longer period of operation by force or other shocks. Furthermore, the assignment of the signal generator in the region of the mounted on a printed circuit board receiving sensors is exactly vornehmbar, so that the setting of the field changes or the sensor signal is not subject to unwanted fluctuations even with a longer operating time. Namely, since the distance between the signal transmitters, which are fixedly supported on the drivers and the mounted on the circuit board receiving sensors is maintained constant, the distance between these components remains unchanged after assembly, so that by the one-time adjustment and calibration of the device reliable and accurate operation is possible.
In der Zeichnung ist ein erfindungsgemäßes Ausführungsbeispiel dargestellt, das nachfolgend näher erläutert wird. Im Einzelnen zeigt:
Figur 1- eine Vorrichtung, mit einem in einem Gehäuse eingesetzten kippbaren und drehbaren Steuerknüppel, dessen Bewegungen auf vier Zwischenglieder übertragen werden, die an in dem Gehäuse eingesetzten Mitnehmern angeformt sind, in Explosionsdarstellung,
Figur 2- die Vorrichtung gemäß
Figur 1 Figur 3- die Vorrichtung gemäß
Figur 1Figur 2 Figur 4- die Vorrichtung gemäß
Figur 1 Figur 5- eine Ausführungsvariante der Vorrichtung nach
Figur 1 Figur 6- die Vorrichtung gemäß
Figur 5 Figur 7- die Vorrichtung gemäß
Figur 5
- FIG. 1
- a device with an inserted into a housing tiltable and rotatable joystick whose movements are transmitted to four intermediate links which are integrally formed on drivers inserted in the housing, in exploded view,
- FIG. 2
- the device according to
FIG. 1 in the assembled state, along the section line II-II, - FIG. 3
- the device according to
FIG. 1 turned 45 ° opposite theFIG. 2 , on average, - FIG. 4
- the device according to
FIG. 1 in bottom view, - FIG. 5
- a variant of the device according to
FIG. 1 , with one in one Housing tilt-and rotatably inserted control stick, whose movements can be transmitted via four intermediate links to four used in the housing designed as a rotary potentiometer drivers, in section, - FIG. 6
- the device according to
FIG. 5 with additionally provided in the housing electrical lines, in section and - FIG. 7
- the device according to
FIG. 5 , in bottom view.
Zur Bewegungsausrichtung ist an dem Steuerknüppel 3 in dessen unteren im Gehäuse angeordneten Bereich eine Kugel 7 angeformt, die als Lager für den Steuerknüppel 3 in dem Gehäuse 2 wirkt. Die Kugel 7 des Steuerknüppels 3 wird dabei von zwei Führungsplatten 5 und 6 umgriffen und in diesen drehbar und kippbar gehalten. Die Führungsplatten 5 und 6 sind an dem Gehäuse 2 über Schrauben 19 und Muttern 21 abgestützt.For movement alignment, a
Die Führungsplatten 5 und 6 sind nach außen durch eine Abdeckung 4 und ein Abschlussgehäuse 24 verschlossen. Um den Eintritt von Staub und sonstigen Verschmutzungen zu verhindern kann ein nicht dargestellter Faltenbalg auf das Abschlussgehäuse 24 aufgeschoben werden. Der Steuerknüppel 3 durchgreift die Abdeckung 4 und das Abschlussgehäuse 24, so dass dieser von außen manuell greifbar ist. Das Abschlussgehäuse 24 übt dabei eine Rückstellkraft auf den Steuerknüppel 3 aus, durch die dieses in die Ausgangslage überführt ist.The
Des Weiteren ist an dem im Gehäuse 2 endenden unteren Abschnitt des Steuerknüppels 3 ein Teller 15 fest angebracht, von dem vier Stifte 16 abstehen. Das Gehäuse 2 weist vier rund ausgebildete Aufnahmen 10 auf, in die jeweils ein Mitnehmer 11 eingesetzt ist. Die Mitnehmer 11 sind in Richtung einer im Gehäuse 2 untergebrachten Leiterplatte 17 offen ausgebildet und in diesen ist jeweils ein Permanent-Magnet 8 oder 9 derart eingesetzt, dass zwei benachbarte PermanentMagnete 8 oder 9 unterschiedlich gepolt sind, so dass diese ein andersartig ausgebildetes Magnetfeld erzeugen.Furthermore, a
An die Mitnehmer 11 ist jeweils ein als Zwischenglied 12 wirkender Steg 13 angeformt, der in Richtung des Steuerknüppels 3, also in das Zentrum des Gehäuses 2, zugekehrt ist. In den jeweiligen Steg 13 ist ein Langloch 14 eingearbeitet, in das die Stifte 16 des Tellers 15 eingreifen. Somit ist der Steuerknüppel 3 trieblich mit den vier Mitnehmern 11 und damit mit den Permanentmagneten 8 oder 9 verbunden. Die Rotationsachse der Permanentmagnete 8 und 9 verläuft senkrecht zu der von einer Leiterplatte 17 gebildeten horizontalen Ebene.At the
Auf der Leiterplatte 17 sind vier Magnetsensoren, die als sogenannte Hall-Sensoren 18 aufgebaut sind, angebracht. Die Position der jeweiligen Hall-Sensoren 18 ist dem jeweiligen Permanentmagnet 8 oder 9 zugeordnet, so dass die Permanentmagnete 8 oder 9 unmittelbar oberhalb und fluchtend zu den Hall-Sensoren 18 verlaufen.On the
Den
Des Weiteren ist ersichtlich, dass in dem Gehäuse 2 eine Trennplatte 34 eingesetzt ist, durch die die Mitnehmer 11 in dem Gehäuse 2 abgestützt werden.Furthermore, it can be seen that in the
In
Wird der Steuerknüppel 3 zusätzlich oder ausschließlich gekippt, bewegen sich jeweils die der Kippbewegung gegenüberliegende Mitnehmer 11 in entgegensetzter Drehrichtung zueinander.In
If the
Den
Die Breite der Führungsnuten 33 entspricht dem Durchmesser der darin eingesetzten Kugelköpfe 32.The width of the
Zusätzlich sind im Inneren des Steuerknüppels 3 mehrere elektrische Leitungen 36 vorgesehen, die mit einem am freien nach außen abstehenden Ende des Steuerknüppels 3 angebrachten Drehknopf oder Taster verbunden sind. Die durch die Drehung des Drehknopfes oder durch die Betätigung des Tasters erzeugten elektrischen Signale werden an die Leiterplatte 17 durch die Leitungen 36 übertragen und von einer auf der Leiterplatte 17 angebrachten elektrischen Recheneinheit verwerket und in elektrische Signale umgewandelt. Der Austritt der elektrischen Leitungen 36 aus dem Steuerknüppel 3 erfolgt unmittelbar im Inneren des Gehäuses 2 und in geringem Abstand zu der Kippebene 35 des Steuerknüppels 3, so dass die elektrischen Leitungen 36 vorteilhafterweise keinen großen Auslenkbewegungen ausgesetzt sind und daher wenig mechanisch belastet werden.In addition, a plurality of
Ferner können über die Leitungen 36 im Steuerknüppel 3 befindlichen Leuchtdioden angesteuert werden.Furthermore, light-emitting diodes located in the
Die Rückstellung des Steuerknüppels 3 in eine Ausgangslage erfolgt durch eine am Abschlussgehäuse 24 aufgesetzte Feder 22, die zwischen dem Abschlussgehäuse 24 und ein am Steuerknüppel 3 angebrachter Anschlag 23 eingesetzt ist. Sobald der Steuerknüppel 3 daher in eine bestimmte Winkellage gekippt oder gedreht wird, entsteht eine Kraft, die auf die Feder 22 einwirkt und die durch diese zusammengepresst wird. Sobald der Steuerknüppel 3 daher wieder keiner Auslenkkraft unterworfen wird, schnappt die Feder 22 in ihre Ursprungslage zurück und richtet den Steuerknüppel 3 senkrecht zu dem Gehäuse 2 verlaufend aus. Dies entspricht der Ausgangslage des Steuerknüppels 3 in Bezug auf das Gehäuse 2.The provision of the
In dem Gehäuse 2 können auch mehrere Steuerknüppel 3 vorgesehen sein. Die Hall-Sensoren 18 oder Empfangssensoren sind dann auf der einen Leiterplatte 17 angeordnet, so dass eine solche Ausbildung weniger Platz benötigt und einfach herzustellen ist.In the
Des weiteren können die Zwischenglieder (12) derart zusammenwirken, dass eine Über-oder Untersetzung der Bewegung des Steuerknüppels erfolgt.Furthermore, the intermediate links (12) can cooperate in such a way that an over or under reduction of the movement of the joystick takes place.
Claims (6)
- A device (1) for transforming mechanical movements into electrical signals used for process control,- with a housing (2) in which a control stick (3) is arranged so as to allow it to tilt in one plane in order to adsorb and transmit the movement,- with at least two signal transmitters (8, 9) allocated to the control stick (3) which are in a driving connection with the control stick (3) by means of intermediate elements (12) of the device (1), and by means of which a field can be generated in the movement plane of the control stick (3),- with at least two reception sensors (18) interacting with the signal transmitters (8, 9), in which case the reception sensors (18) are accommodated immediately in the area of the signal transmitters (8, 9) in the housing (2), and by means of which the change in the field can be measured,- with a driver (11) firmly connected to each of the signal transmitters (8, 9), each of which is in a force-locking active connection with the control stick (3),- in which case the intermediate elements (12) are configured as pins (31) which are each formed on one of the drivers (11) and point in the direction of the control stick (3), in which case each of the signal transmitters (8, 9) is mounted in the housing (2) in a rotating arrangement,in which case the signal transmitters (8, 9) are configured as permanent magnets (8, 9) which allow a magnetic field to be generation, in which case the reception sensors (18) are configured as Hall sensors, in which case the driving active connection between the control stick (3) and the signal transmitters (8, 9) allows a rotational movement and/or a tilting movement of the control stick (3) to be transferred into a rotational movement of the signal transmitters (8, 9) in order to change their position in relation to the reception sensors (18), in which case the free ends of the pins (31) are each inserted in a guide groove (33), each of which is worked into a plate (15) that is firmly connected to the control stick (3), in which case the free ends of the pins (31) arranged in the guide grooves (33) are configured as a ball head (32) and in which case the width of the corresponding guide groove (33) corresponds to the diameter of the corresponding ball head (32).
- The device in accordance with Claim 1,
characterised in that
at least one of the intermediate elements (12) is configured as a step-up or step-down element, by means of which the movements of the control stick (3) are increased or reduced.. - The device in accordance with one or more of the aforementioned claims,
characterised in that
the axes of rotation of the signal transmitters (8, 9) are at right angles to a plane which is preferably horizontal. - The device in accordance with one or more of the aforementioned claim,
characterised in that
the control stick (3) is mounted in the housing (2) in a rotating arrangement and that rotational movements of the control stick (3) can be transmitted to the drivers (11) by means of the intermediate elements (12). - The device in accordance with one or more of the aforementioned claims,
characterised in that
a circuit board (17) is arranged in the housing (2) adjacent to the signal transmitter (8, 9), the reception sensors (18) are provided on the circuit board (17) and allow the changes in the field to be converted into electrical signals for process control. - The device in accordance with one or more of the aforementioned claims,
characterised in that
a partition plate (34) is inserted in the housing (2) and the signal transmitters (8, 9) are held supported in this plate (34).
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE200610030319 DE102006030319A1 (en) | 2006-06-30 | 2006-06-30 | Device for transformation of mechanical movements into electrical signals, which serve for process control, has housing, in which control stick is tiltably arranged, and receiving sensors are accommodated directly in housing |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1903418A1 EP1903418A1 (en) | 2008-03-26 |
| EP1903418B1 true EP1903418B1 (en) | 2014-07-02 |
Family
ID=38565597
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP07011747.8A Active EP1903418B1 (en) | 2006-06-30 | 2007-06-15 | Device for transforming mechanical movement into electrical signals |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP1903418B1 (en) |
| DE (1) | DE102006030319A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3367205A1 (en) | 2017-02-24 | 2018-08-29 | RAFI GmbH & Co. KG | Control device |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008037080A1 (en) * | 2008-08-08 | 2010-02-11 | Ford Global Technologies, LLC, Dearborn | Operating device i.e. pitman arm, for e.g. controlling motor vehicle lighting, has transmitting units linearly arranged in direction, and receiving units linearly arranged in another direction, which deviates from former direction |
| GB2484452B (en) | 2010-07-27 | 2014-12-31 | Penny & Giles Controls Ltd | A control device |
| DE202012006199U1 (en) * | 2012-06-26 | 2013-09-30 | Hatox Gmbh | joystick |
| EP3760021B1 (en) * | 2018-03-28 | 2021-09-29 | Nanjing Chervon Industry Co., Ltd. | Riding lawn mower |
| CN110313297B (en) * | 2018-03-28 | 2021-03-05 | 南京德朔实业有限公司 | Riding mower operating device and riding mower |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4459578A (en) * | 1983-01-13 | 1984-07-10 | Atari, Inc. | Finger control joystick utilizing Hall effect |
| EP0872957A1 (en) * | 1997-04-18 | 1998-10-21 | Eaton Corporation | Switch assembly |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3392596A (en) * | 1966-05-02 | 1968-07-16 | Bausch & Lomb | Joy stick type multi-operation control device |
| JPS5224990B2 (en) * | 1971-10-30 | 1977-07-05 | ||
| US3942148A (en) | 1974-05-29 | 1976-03-02 | Matsushita Electric Industrial Company, Limited | Device for simultaneously controlling a plurality of variable resistors |
| US4275611A (en) * | 1979-03-29 | 1981-06-30 | Atari, Inc. | Joystick controller |
| US4469330A (en) * | 1982-01-07 | 1984-09-04 | Atari, Inc. | Controller unit for video game |
| WO1991011817A1 (en) * | 1990-01-31 | 1991-08-08 | Kabushiki Kaisha Komatsu Seisakusho | Operating lever device |
| US5675359A (en) * | 1995-01-13 | 1997-10-07 | Advanced Technology Systems, Inc. | Joystick controller |
| US6404417B1 (en) * | 1999-03-22 | 2002-06-11 | Logitech Europe S.A. | Direct drive rotational sensor adapted to withstand off-axis loading |
| US6222179B1 (en) * | 1999-06-10 | 2001-04-24 | Peter J. Mikan | Fiber optic control having joystick |
| GB0006350D0 (en) * | 2000-03-17 | 2000-05-03 | Penny & Giles Controls Ltd | Joystick controller |
| US6329647B1 (en) * | 2000-07-03 | 2001-12-11 | Peter J. Mikan | Compensation reference circuit for opto-mechanical joystick |
| JP3897547B2 (en) * | 2001-07-05 | 2007-03-28 | アルプス電気株式会社 | Input device |
-
2006
- 2006-06-30 DE DE200610030319 patent/DE102006030319A1/en not_active Ceased
-
2007
- 2007-06-15 EP EP07011747.8A patent/EP1903418B1/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4459578A (en) * | 1983-01-13 | 1984-07-10 | Atari, Inc. | Finger control joystick utilizing Hall effect |
| EP0872957A1 (en) * | 1997-04-18 | 1998-10-21 | Eaton Corporation | Switch assembly |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3367205A1 (en) | 2017-02-24 | 2018-08-29 | RAFI GmbH & Co. KG | Control device |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102006030319A1 (en) | 2008-01-03 |
| EP1903418A1 (en) | 2008-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2171315B1 (en) | Electromechanical transducer device | |
| EP2761385B1 (en) | Rotary/push operating device for a human-machine interface | |
| EP2457002B1 (en) | Device for detecting the position of a shift and/or selector lever for a transmission and shifting device for the transmission of a motor vehicle | |
| EP1903418B1 (en) | Device for transforming mechanical movement into electrical signals | |
| EP2176569B1 (en) | Sensor device | |
| EP2246668B1 (en) | Electric actuator | |
| DE102011005370B4 (en) | Lever actuator | |
| DE102016121671B3 (en) | Position sensor and positioner with position sensor | |
| EP2771755B1 (en) | Operator control element with magnetic return | |
| WO2007087914A1 (en) | Actuator, particularly for a motor vehicle parking brake | |
| EP1007812A1 (en) | Motor vehicle closing device with a position recognition system for a moveable control element | |
| DE602004011544T2 (en) | Motorized and orientable measuring head | |
| EP3074836A2 (en) | Actuator, in particular for a motor vehicle | |
| WO2010070014A1 (en) | Angle sensor | |
| EP1992845B1 (en) | Electronic selector lever module | |
| EP3308056A1 (en) | Device for detecting the position of a gear step selector lever | |
| DE102007026303A1 (en) | Device for acquiring and evaluating the gear selection in a vehicle comprises a magnetic sensor element for detecting three spatial components of a magnetic field | |
| DE112016005544B4 (en) | Transmission mechanism, lever mechanism and non-contact lever switch | |
| DE102006030746A1 (en) | Lever switch for steering column of motor vehicle, has magnetic field sensor arrangement producing analog output signals so that different output signals are assigned to different switching positions of lever | |
| EP2160527B1 (en) | Device for detecting switch positions | |
| WO2014000864A1 (en) | Joystick | |
| EP3320305B1 (en) | Sensor arrangement with modular construction | |
| EP3064793A1 (en) | Motion sensor system for railway vehicles | |
| DE102015208803B3 (en) | Turntable for a coordinate measuring machine | |
| DE102014208025B4 (en) | Device for setting an operating parameter of an electrical device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| 17P | Request for examination filed |
Effective date: 20080510 |
|
| 17Q | First examination report despatched |
Effective date: 20080623 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20140327 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 676217 Country of ref document: AT Kind code of ref document: T Effective date: 20140715 Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502007013247 Country of ref document: DE Effective date: 20140814 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20140702 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141003 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141103 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141002 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141102 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502007013247 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20150407 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20150615 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150615 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20160229 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150630 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150615 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150615 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150630 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 676217 Country of ref document: AT Kind code of ref document: T Effective date: 20150615 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150615 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20070615 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140702 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502007013247 Country of ref document: DE Representative=s name: GEITZ PATENTANWAELTE PARTG MBB, DE Ref country code: DE Ref legal event code: R082 Ref document number: 502007013247 Country of ref document: DE Representative=s name: GEITZ TRUCKENMUELLER LUCHT CHRIST PATENTANWAEL, DE |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230513 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240617 Year of fee payment: 18 |