EP1800863A1 - Dispositif d'encrage et procédé d'ajustement correspondant - Google Patents
Dispositif d'encrage et procédé d'ajustement correspondant Download PDFInfo
- Publication number
- EP1800863A1 EP1800863A1 EP06291983A EP06291983A EP1800863A1 EP 1800863 A1 EP1800863 A1 EP 1800863A1 EP 06291983 A EP06291983 A EP 06291983A EP 06291983 A EP06291983 A EP 06291983A EP 1800863 A1 EP1800863 A1 EP 1800863A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- axis
- ink
- roller
- inking device
- offset
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 10
- 238000007639 printing Methods 0.000 claims abstract description 25
- 238000001514 detection method Methods 0.000 claims abstract description 16
- 238000012546 transfer Methods 0.000 claims abstract description 5
- 230000005540 biological transmission Effects 0.000 claims description 12
- 230000006870 function Effects 0.000 claims description 7
- 238000006073 displacement reaction Methods 0.000 claims description 6
- 230000015607 signal release Effects 0.000 claims 1
- 238000012937 correction Methods 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000006399 behavior Effects 0.000 description 1
- 238000012417 linear regression Methods 0.000 description 1
- 238000007645 offset printing Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41F—PRINTING MACHINES OR PRESSES
- B41F13/00—Common details of rotary presses or machines
- B41F13/08—Cylinders
- B41F13/24—Cylinder-tripping devices; Cylinder-impression adjustments
- B41F13/34—Cylinder lifting or adjusting devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41F—PRINTING MACHINES OR PRESSES
- B41F33/00—Indicating, counting, warning, control or safety devices
- B41F33/04—Tripping devices or stop-motions
- B41F33/14—Automatic control of tripping devices by feelers, photoelectric devices, pneumatic devices, or other detectors
Definitions
- Known ink devices are known in the state of the art, including an ink reservoir, a film pick-up roller adapted to transmit ink to a dispensing roller, and an ink fountain roller which is adapted to transfer ink. from the ink tank ink to the film pick-up roller.
- the positioning of the film take-up roller with respect to the ink roller is a very delicate adjustment, since it conditions the homogeneity of the ink supply to the support to be printed, which is generally constituted by a paper strip. to print.
- the film pick roller has an axis movable relative to the axis of the ink roller.
- the inking devices are also provided with means for fixing the axis of the film-taking roller with respect to the axis of the ink-roller.
- the distance between the ink roll and the film roll is adjusted by shims.
- the shims of a certain thickness are slid between the ink roller and the film pick roller.
- the position of the film pick-up roller (also called pick-up roller) is set so that it is in contact with these wedges when in the printing position. Then the film pick roller is fixed and the shims are removed.
- the invention aims to overcome the disadvantages mentioned, and to provide an inking device that allows a more reliable and easier adjustment for a regular supply of ink.
- the subject of the invention is an inking device of the aforementioned type, characterized in that it comprises detection means adapted to evaluate the actual distance between the takeup roller and the film-taking roller in the width of printing and / or detecting an angular offset of the two axes relative to each other and to provide an output signal representing this angular offset.
- Figure 1 a printing unit according to the invention, designated by the general reference 2.
- This printing unit 2 comprises a plate roll 4 and a blanket roller 6 which is adapted to print an image on a paper web 8 which forms a printing medium.
- the printing unit 2 is provided with an inking device 10, as well as a multitude of distributor rollers 12.
- the inking device 10 is provided with an ink reservoir 14, a film-taking roller 16, rotatable about a first axis XX, and an ink-jet roller 18 which is adapted to transfer from the ink tank ink 14 to the takeup roll 16 and which is rotatable about a second axis YY.
- the ink tank 14 has two side plates 20, one of which is shown, as well as a multitude of adjusting screws 22, which are movable and which make it possible to adjust the setting locally. thickness of the ink transmitted from the ink tank 14 on the ink roller 18.
- the ink roller 18 is housed in a printer frame 24, so that its axis YY is fixed.
- the ink roller 18 defines a print width L extending parallel to the YY axis.
- the inking device 10 also defines the following quantities:
- the distance ⁇ is the distance between the takeup roller 16 and the ink roller 18 at a given axial location.
- the distance dimensioned function ⁇ CF is the actual distance between the take-up roller 16 and the ink roller 18 at one axial end and the distance on the control side ⁇ CC is the actual distance between the take-up roller 16 and the ink roller 18 at the end. other axial end (see in particular Figure 2).
- the lithographic offset or lithographic offset of a set screw 22 is the position of the set screw 22 at which the thickness of the ink transferred to the ink roll 18 is equal to the distance between the roll 18 and the gripper roll 16 at the axial position of the associated adjusting screw 22.
- the adjusting screw 22A of Figure 2 it is the position at which the ink thickness on the ink roller 18 is equal to the gap ⁇ CF.
- the distance ⁇ setpoint is the required distance between the ink roller 18 and the takeup roller 16 to obtain an optimal adjustment behavior of the adjusting screws 22. This distance st predetermined for a given print command.
- the inking device 10 is provided with detection means 28 adapted to detect an angular offset of the two axes X-X and Y-Y relative to each other.
- the inking device 10 is further provided with control means 30 adapted to angularly move the first axis X-X relative to the second axis Y-Y.
- the detection means 28 comprise a plurality of sensors 32 adapted to reveal the density of the ink printed on the printing medium 8, at different locations on the printing width L.
- the detection means 28 furthermore comprise a first microcontroller 34A to which the sensors 32 are connected via a detection line 36.
- the detection means 28 are provided with a multitude of sensors 38 which are adapted to detect the position of each of the adjusting screws 22 via a detection line 40A connected to the first microcontroller 34A.
- the first microcontroller 34A is adapted to calculate and supply an output signal to the control means 30 by an output line 37.
- This output signal represents the angular offset of the axis XX with respect to the axis YY.
- the film-taking roller 16 comprises at each end a trunnion 42 of axis X-X.
- the control means 30 comprise a second microcontroller 34B to which the first microcontroller 34A is connected by the line 37.
- This second microcontroller 34B is adapted to receive the signal representing the positioning of the film-taking roller 16 and in particular the angular offset of the two axes XX and YY.
- the output signal also represents the distance ⁇ between the film-taking roller 16 and the ink roller 18 and in particular at at least two locations over the printing width L. These distances are in this case ⁇ CC and ⁇ CF at the two ends the print width L.
- the control means 30 comprise two motors 46 and transmission means which are formed by a threaded rod 48 received in a threaded bush 50 fixed on a spherical joint 44.
- Each pin 42 is freely rotatably received in one of the spherical joints 44.
- the transmission means 42, 48, 50 are adapted for each of the motors 46 to transmit the drive of the associated motor 46 in an angular displacement of the first axis X-X relative to the second axis Y-Y. More specifically, the displacement of the end of the film-taking roller 16 is carried out radially with respect to the second axis Y-Y.
- the transmission means 42, 48, 50 are also adapted to translate the film take-up roller 16 in translation radially relative to the second Y-Y axis by simultaneously driving the two motors 46.
- the control means 30 further comprise a control line 40B which connects the second micro-controller 34B to each of the adjustment screws 22.
- the control means 30 are adapted to control the position of the adjusting screws 22 via the second microcontroller 34B.
- the inking device operates in the following manner.
- the sensors 32 raise this real density of the ink printed on the strip 8 at several places distributed over the printing width L. Then, signals representing the real density of the ink at these locations are transferred. by line 36 to the first microcontroller 34A, which calculates a correction value of the set screw aperture 22 needed to achieve a target optical density at each of the locations. This is the typical operation of a loop ink density control system.
- the corrections of the opening are then sent to the adjustment screws 22 by the microcontroller 34B.
- the positions of the adjusting screws 22 corresponding to the target ink density are sent to the microcontroller 34A.
- the microcontroller 34A calculates the offset ⁇ between the X-X and Y-Y axes and the real difference ⁇ between the rollers 16 and 18.
- the microcontroller 34B controls the motors 46 by reducing the angle ⁇ and moving the roller 16 so that the distance ⁇ set is obtained.
- Figure 3B shows a second embodiment of the inking device according to the invention.
- This inking device comprises an additional memory 47 in which are stored values representing the coverage ratio TC of the printing plate for each set screw 22.
- This coverage ratio TC indicates the amount of ink to be applied to the tape to obtain a uniform real ink density over the print width L.
- An example of these values for a device having 26 adjusting screws 22 is shown in Figure 4A. For screw 22 number one, the coverage rate is about 18%.
- This memory 47 is connected to the first microcontroller 34A via a line 47A and is adapted to send the values TC thereto.
- the sensors 32 and the detection line 36 are omitted.
- the control and corrections of the opening of the inking screws 22 are not performed by a loop control system using these sensors 32 but manually by an operator.
- the operator modifies the opening of the adjusting screws 22 until the supply of ink to the web to the substrate is considered satisfactory. Then, the positions of the adjusting screws 22 corresponding to this target ink density are sent to the microcontroller 34A by the line 40A.
- Figure 4B shows for screws number 1 to 26 the opening OV of the adjusting screws. Thus, the number one screw is open at around 56%.
- TC coverage rates ie the amount of ink required to ensure a uniform print density across the print width, when preparing of printing.
- This data is sent to the first micro-controller 34-A by the control link 47A.
- the OV values of the openings of the screws 22 are sent to the microcontroller 34A by the line 40A.
- the microcontroller 34A obtains information on the speed of rotation of the ink rollers 18, for example by means of a sensor 80 and a line 81.
- Paper Coefficient and "Inking Coefficient” are predetermined constant values.
- the offset values OL are then obtained by adjusting screw 22, which is shown in FIG. 4C.
- the lithographic offset values are identical for all the adjustment screws 22. In reality, they vary from one adjusting screw to the other as a function of the angular offset ⁇ between the axes XX, YY.
- the offset values are converted into a linear curve DL, for example by linear regression.
- This curve DL is inclined by an angle ⁇ with respect to the abscissa.
- the DL curve also defines a lithographic offset on the OLCF function side and a lithographic offset on the OLCC control side at both ends of the print width L.
- lithographic offset values OLCF and OLCC are converted into the distances between the film take-up roller 16 and the ink roller 18 at both ends of the print width ⁇ CF and ⁇ CC.
- ⁇ a.OffsetLithographigue OL [%] + b
- a and b are characteristic constants of the opening of the ink fountain and are determined for each inking device. a is for example equal to 0.6 and b is for example equal to 0.03 mm.
- This angular deflection ⁇ and / or the actual distances ⁇ CF and ⁇ CC of each end between the film take-up roller 16 and the ink roller 18 are transformed into a signal which is transmitted via line 37 to the second micro-controller 34B.
- a step 106 the values ⁇ CF and ⁇ CC are compared with a setpoint value ⁇ setpoint which corresponds to parallel axes XX and YY and preferably also to a distance from the rollers at which the lithographic offset values are identical to a set lithographic offset.
- one or both motors 46 are driven by reducing the real angular offset, until the axis XX is parallel to the axis YY and / or until the actual distance between the rollers is identical to the setpoint distance ⁇ setpoint .
- one or both motors 46 are driven such that the angular offset is reduced, but not until the complete parallelism of the two axes Y-Y and X-X.
- the angular deflection ⁇ and thus the actual angular offset, is compared with a predetermined threshold angular deflection which is greater than 0 °. Then, only when the angular deflection is greater than the threshold deviation, the angular offset is reduced or brought to zero. Thus, a modification of a negligible non-parallelism between the two axes XX and YY is avoided.
- control means 30 await the termination of the current command before driving the motors 46.
- the following command can be started.
- the influence of a change in the position of the adjusting screws 22 during the current command can be avoided.
- An improved variant of the operating mode of the inking device is as follows.
- the microcontroller 34A evaluates the representative values of the last n works of the angular offset between the axis XX of the takeup roller 16 and the YY axis of the ink roller 18, as well as the distance ⁇ CC and ⁇ CF between the ink roll and the film pick roller at both ends of the print width. Signals representing these values are sent via line 37 to microcontroller 34B.
- the microcontroller 34B slaves the motors 46 in order to reduce the angular offset ⁇ , in a manner similar to that described above, and to position the film take-up roller at the set distance of the ink roller.
- the output line 37 is connected to a display unit which is adapted to display an offset value representing the angular offset of the X-X and Y-Y axes.
- the control means 30 are actuated by an operator as a function of the displayed value.
- the control means 30 may include micrometer screws which replace the motors 46, the threaded rods 48 and the threaded bushings 50 of the embodiment described above.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Inking, Control Or Cleaning Of Printing Machines (AREA)
Abstract
Description
- La présente invention concerne un dispositif d'encrage d'une unité d'impression, du type comprenant :
- un réservoir d'encre,
- un rouleau preneur pelliculaire ayant un premier axe,
- un rouleau d'encrier définissant une largeur d'impression, adapté pour transférer de l'encre du réservoir d'encre au rouleau preneur pelliculaire et ayant un second axe.
- Elle s'applique notamment aux unités d'impression des machines d'impression rotative offset.
- On connaît dans l'état de la technique des dispositifs d'encrage comprenant un réservoir d'encre, un rouleau preneur pelliculaire adapté pour transmettre de l'encre à un rouleau distributeur, ainsi qu'un rouleau d'encrier qui est adapté pour transférer de l'encre du réservoir d'encre au rouleau preneur pelliculaire.
- Le positionnement du rouleau preneur pelliculaire par rapport au rouleau d'encrier est un réglage très délicat, étant donné qu'il conditionne l'homogénéité de l'apport d'encre au support à imprimer, qui est généralement constitué par une bande de papier à imprimer.
- Afin de pouvoir régler l'apport d'encre, le rouleau preneur pelliculaire a un axe mobile par rapport à l'axe du rouleau d'encrier. Les dispositifs d'encrage sont également munis de moyens de fixation de l'axe du rouleau preneur pelliculaire par rapport à l'axe du rouleau d'encrier.
- Habituellement, la distance entre le rouleau d'encrier et le rouleau pelliculaire est réglée à l'aide de cales. Les cales d'une certaine épaisseur sont glissées entre le rouleau d'encrier et le rouleau preneur pelliculaire. La position du rouleau preneur pelliculaire (aussi dit rouleau « pick-up ») est réglée de telle sorte qu'il soit en contact de ces cales lorsqu'il est en position en impression. Ensuite, le rouleau preneur pelliculaire est fixé et les cales sont retirées.
- Lorsque l'opérateur constate un apport inégal d'encre sur la largeur d'impression, il déplace l'axe du rouleau preneur, de telle sorte qu'il soit parallèle à l'axe du rouleau d'encrier et le règle de nouveau au moyen des cales.
- Ce réglage a les inconvénients d'être peu exact et d'être soumis à la subjectivité de l'opérateur.
- L'invention a pour but de pallier les inconvénients cités, et de proposer un dispositif d'encrage qui permette un réglage plus fiable et plus facile en vue d'un apport régulier en encre.
- A cet effet, l'invention a pour objet un dispositif d'encrage du type précité, caractérisé en ce qu'il comprend des moyens de détection adaptés pour évaluer la distance réelle entre le rouleau preneur et le rouleau preneur pelliculaire dans la largeur d'impression et/ou pour détecter un décalage angulaire des deux axes l'un par rapport à l'autre et pour fournir un signal de sortie représentant ce décalage angulaire.
- Selon les modes particuliers de réalisation, le dispositif d'encrage comporte l'une ou plusieurs des caractéristiques suivantes :
- dispositif d'encrage comprend des moyens de commande adaptés pour déplacer angulairement le second axe par rapport au premier axe, et les moyens de commande sont adaptés pour réduire le décalage angulaire en fonction du signal de sortie ;
- le dispositif d'encrage comprend des moyens de commande adaptés pour positionner le rouleau preneur pelliculaire par rapport au rouleau d'encrier en fonction du signal de sortie ;
- le dispositif d'encrage les moyens de détection comprennent au moins un capteur adapté pour révéler la densité de l'encre imprimée sur un support à imprimer en au moins deux emplacements différents sur la largeur d'impression ;
- le dispositif d'encrage comporte au moins deux vis de réglage de l'épaisseur d'encre sur le rouleau d'encrier ;
- les moyens de détection sont adaptés pour détecter la position des vis de réglage ;
- les moyens de détection sont adaptés pour détecter la position d'au moins l'une des vis de réglage correspondant à l'offset lithographique ;
- le dispositif d'encrage comporte en outre une mémoire et des moyens adaptés pour stocker une valeur représentant la position d'offset lithographique dans la mémoire lorsque les axes des rouleaux d'encrier et de preneur sont parallèles ;
- les moyens de commande comportent un premier moteur et des premiers moyens de transmission, adaptés pour transmettre un entraînement du premier moteur en un déplacement angulaire du premier axe par rapport au second axe ;
- les moyens de commande comprennent un second moteur et des second moyens de transmission, adaptés pour transmettre un entraînement du second moteur en un déplacement angulaire du premier axe par rapport au second axe ; et
- le ou chaque moyen de transmission est adapté pour déplacer une extrémité du rouleau preneur radialement par rapport au second axe.
- L'invention a en outre pour objet un procédé d'ajustement d'une unité d'impression, caractérisé en ce que le dispositif d'encrage est un dispositif tel que décrit précédemment, et en ce que le procédé comprend les étapes suivantes :
- a) déterminer la distance réelle entre le rouleau preneur pelliculaire et le rouleau d'encrier en au moins deux points de la largeur d'impression et/ou déterminer le décalage angulaire réel des premier et second axes l'un par rapport à l'autre,
- b) déplacer le premier axe par rapport au second axe en réduisant le décalage angulaire réel et/ou en modifiant la position relative radiale du premier axe par rapport au second axe.
Selon un mode particulier de réalisation, le procédé selon l'invention comporte les étapes suivantes : - c) vérification si le décalage angulaire réel est supérieur à un décalage de seuil et/ou vérifier si la distance réelle est supérieure à une distance de seuil,
- d) mettre l'étape b) en oeuvre uniquement lorsque le décalage angulaire réel est supérieur au décalage de seuil et /ou lorsque la distance réelle est supérieure à la distance de seuil ;
- e) après l'étape b), déterminer l'offset lithographique d'au moins une vis de réglage ; et
- f) mémoriser l'offset lithographique ainsi déterminée dans une mémoire.
- L'invention sera mieux comprise à la lecture de la description qui va suivre, donnée uniquement à titre d'exemple et faite en se référant aux dessins annexés, sur lesquels :
- la figure 1 est une vue de côté schématique d'une unité d'impression selon l'invention ;
- la figure 2 est une vue en perspective d'une partie d'un dispositif d'encrage selon l'invention ;
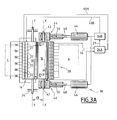
- la figure 3A est une vue de dessus schématique d'un dispositif d'encrage selon un premier mode de réalisation de l'invention ;
- la figure 3B est une vue de dessus schématique d'un dispositif d'encrage selon un second mode de réalisation de l'invention ; et
- les figures 4A à 4C sont des graphiques montrant des paramètres lors de l'exploitation des dispositifs d'encrage selon l'invention.
- Sur la figure 1 est représentée une unité d'impression selon l'invention, désignée par la référence générale 2.
- Cette unité d'impression 2 comporte un rouleau porte-plaque 4 ainsi qu'un rouleau porte-blanchet 6 qui est adapté pour imprimer une image sur une bande de papier 8 qui forme un support à imprimer.
- L'unité d'impression 2 est munie d'un dispositif d'encrage 10, ainsi que d'une multitude de rouleaux distributeurs 12.
- Le dispositif d'encrage 10 est muni d'un réservoir d'encre 14, d'un rouleau preneur pelliculaire 16, mobile en rotation autour d'un premier axe X-X, et d'un rouleau d'encrier 18 qui est adapté pour transférer de l'encre du réservoir d'encre 14 au rouleau preneur 16 et qui est mobile en rotation autour d'un second axe Y-Y.
- Comme ceci est représenté sur la figure 2, le réservoir d'encre 14 comporte deux plaques latérales 20, dont l'une est représentée, ainsi qu'une multitude de vis de réglage 22, qui sont mobiles et qui permettent de régler localement l'épaisseur de l'encre transmise du réservoir d'encre 14 sur le rouleau d'encrier 18.
- Comme ceci ressort de la figure 3A, le rouleau d'encrier 18 est logé dans un châssis d'imprimante 24, de telle sorte que son axe Y-Y soit fixe. Le rouleau d'encrier 18 définit une largeur d'impression L s'étendant parallèlement à l'axe Y-Y.
- Le dispositif d'encrage 10 définit également les grandeurs suivantes :
- Distance ε : La distance ε est la distance entre le rouleau preneur 16 et rouleau d'encrier 18 à un emplacement axial donné. La distance coté fonction εCF est l'écart réel entre le rouleau preneur 16 et rouleau d'encrier 18 à une extrémité axiale et la distance coté commande εCC est l'écart réel entre le rouleau preneur 16 et rouleau d'encrier 18 à l'autre extrémité axiale (voir en particulier Figure 2).
- Offset Lithographique : L'offset lithographique ou décalage lithographique d'une vis de réglage 22 est la position de la vis de réglage 22 à laquelle l'épaisseur de l'encre transférée au rouleau d'encrier 18 est égale à la distance entre le rouleau d'encrier 18 et le rouleau preneur 16, à la position axiale de la vis de réglage 22 associée. Par exemple, pour la vis de réglage 22A de la Figure 2, c'est la position à laquelle l'épaisseur d'encre sur le rouleau d'encrier 18 est égale à l'écart εCF.
- La distance εconsigne est la distance requise entre le rouleau d'encrier 18 et le rouleau preneur 16 pour obtenir un comportement optimal de réglage des vis de réglage 22. Cette distance st prédéterminé pour une commande d'impression donnée.
- Le dispositif d'encrage 10 selon l'invention est muni de moyens de détection 28 adaptés pour détecter un décalage angulaire des deux axes X-X et Y-Y l'un par rapport à l'autre. Le dispositif d'encrage 10 est en outre muni de moyens de commande 30 adaptés pour déplacer angulairement le premier axe X-X par rapport au second axe Y-Y.
- Les moyens de détection 28 comprennent une multitude de capteurs 32 adaptés pour révéler la densité de l'encre imprimée sur le support à imprimer 8, en des emplacements différents sur la largeur d'impression L.
- Les moyens de détection 28 comprennent en outre un premier microcontrôleur 34A auquel les capteurs 32 sont reliés par l'intermédiaire d'une ligne de détection 36.
- Les moyens de détection 28 sont munis d'une multitude de capteurs 38 qui sont adaptés pour détecter la position de chacune des vis réglage 22 par l'intermédiaire d'une ligne de détection 40A reliée au premier microcontrôleur 34A.
- Le premier micro-contrôleur 34A est adapté pour calculer et fournir un signal de sortie aux moyens de commande 30 par une ligne de sortie 37. Ce signal de sortie représente le décalage angulaire de l'axe X-X par rapport à l'axe Y-Y.
- Comme visible sur la figure 3A, le rouleau preneur pelliculaire 16 comporte à chaque extrémité un tourillon 42 d'axe X-X. Les moyens de commande 30 comportent un second micro-contrôleur 34B auquel est relié le premier micro-contrôleur 34A par la ligne 37. Ce second microcontrôleur 34B est adapté pour recevoir le signal représentant le positionnement du rouleau preneur pelliculaire 16 et notamment le décalage angulaire des deux axes X-X et Y-Y. Le signal de sortie représente aussi la distance ε entre le rouleau preneur pelliculaire 16 et le rouleau d'encrier 18 et notamment à au moins deux emplacements sur la largeur d'impression L. Ces distances sont en l'occurrence εCC et εCF aux deux extrémités de la largeur d'impression L.
- Les moyens de commande 30 comportent deux moteurs 46 et des moyens de transmission qui sont formés par une tige filetée 48 reçue dans une douille taraudée 50 fixée sur un joint sphérique 44.
- Chaque tourillon 42 est reçu libre en rotation dans l'un des joints sphérique 44.
- Ainsi, les moyens de transmission 42, 48, 50 sont adaptés pour chacun des moteurs 46 pour transmettre l'entraînement du moteur 46 associé en un déplacement angulaire du premier axe X-X par rapport au second axe Y-Y. Plus précisément, le déplacement de l'extrémité du rouleau preneur pelliculaire 16 est effectué radialement par rapport au second axe Y-Y. Les moyens de transmission 42, 48, 50 sont également adaptés pour décaler en translation le rouleau preneur pelliculaire 16 radialement par rapport au second axe Y-Y moyennant un entraînement simultané des deux moteurs 46.
- Les moyens de commande 30 comportent en outre une ligne de commande 40B qui relie le second micro-contrôleur 34B à chacune des vis de réglage 22. Ainsi, les moyens de commande 30 sont adaptés pour commander la position des vis de réglage 22 par l'intermédiaire du second microcontrôleur 34B.
- Le dispositif d'encrage fonctionne de la manière suivante.
- Lorsque l'unité d'impression 2 est en état d'impression d'une commande, une image est imprimée sur la bande 8. Cette image a une densité d'encre réelle qui varie sur la largeur d'impression L.
- Dans un premier temps, les capteurs 32 relèvent cette densité réelle de l'encre imprimée sur la bande 8 en plusieurs emplacements reparties sur la largeur d'impression L. Ensuite, des signaux représentant la densité réelle de l'encre à ces emplacements sont transférés par la ligne 36 au premier microcontrôleur 34A, qui calcule une valeur de correction de l'ouverture de vis de réglage 22 nécessaire pour atteindre une densité optique cible sur chacun des emplacements. Ceci est le fonctionnement typique d'un système de régulation de densité d'encre en boucle.
- Dans le cas du mode de réalisation de la figure 3A, les corrections de l'ouverture sont alors envoyées aux vis de réglage 22 par le micro-contrôleur 34B. Une fois que la plage de la densité optique cible de l'encre a été atteinte, les positions des vis de réglage 22 correspondant à la densité d'encre cible sont envoyés au microcontrôleur 34A.
- Dans un deuxième temps, le micro-contrôleur 34A calcule le décalage α entre les axes X-X et Y-Y et l'écart réel ε entre les rouleaux 16 et 18.
- Dans un troisième temps, le microcontrôleur 34B commande les moteurs 46 en réduisant l'angle α et en déplaçant le rouleau 16 de telle sorte que la distance εconsigne soit obtenue.
- Le procédé de calcul et d'asservissement sera expliqué plus en détail en référence au mode de réalisation de la Figure 3B, mais est également valable pour le mode de réalisation de la Figure 3A.
- La Figure 3B montre un deuxième mode de réalisation du dispositif d'encrage selon l'invention.
- Ce dispositif d'encrage comporte une mémoire additionnelle 47 dans laquelle sont stockées des valeurs représentant le taux de couverture TC de la plaque d'impression pour chaque vis de réglage 22. Ce taux de couverture TC indique la quantité d'encre devant être appliquée sur la bande afin d'obtenir une densité d'encre réelle uniforme sur la largeur d'impression L. Un exemple de ces valeurs pour un dispositif comportant 26 vis de réglage 22 est montré dans la Figure 4A. Pour la vis 22 numéro un, le taux de couverture est d'environ 18%.
- Cette mémoire 47 est relié au premier microcontrôleur 34A par l'intermédiaire d'une ligne 47A et est adapté pour envoyer les valeurs TC à celui-ci.
- Par ailleurs, les capteurs 32 et la ligne de détection 36 sont omises. La commande et les corrections de l'ouverture des vis d'encrage 22 ne sont pas réalisées par un système de régulation en boucle à l'aide de ces capteurs 32 mais manuellement par un opérateur.
- A cet effet, l'opérateur modifie l'ouverture des vis de réglage 22 jusqu'à ce que l'apport d'encre à la bande au substrat est jugé satisfaisant. Ensuite, les positions des vis de réglage 22 correspondant à cette densité d'encre cible sont envoyées au microcontrôleur 34A par la ligne 40A.
- Les données envoyées sont représentées sur la Figure 4B. La Figure 4B montre pour les vis numéro 1 à 26 l'ouverture OV des vis de réglage. Ainsi, la vis numéro un est ouverte à environ 56%.
- Le calcul du décalage angulaire α entre les deux axes X-X et Y-Y est effectué de la manière suivante sera expliqué par la suite en se référant à la Figure 3B.
- Les taux de couverture TC, c'est à dire la quantité d'encre nécessaire pour assurer une densité d'impression uniforme sur la largeur d'impression, lors de la préparation de l'impression. Ces données sont envoyées au premier micro-contrôleur 34-A par la liaison de commande 47A. De plus, les valeurs OV des ouvertures des vis 22 sont envoyées au micro-contrôleur 34A par la ligne 40A.
- En outre, le microcontrôleur 34A obtient une information sur la vitesse de rotation des rouleaux encrier 18 par exemple à l'aide d'un capteur 80 et une ligne 81.
- Le microcontrôleur 34A calcule alors dans une étape 100 l'offset lithographique OL par vis de réglage 22 pour chaque encre selon l'équation suivante :

- Les valeurs « Coeff.papier » et « Coeff.encrage » sont des valeurs constantes prédéterminées.
- On obtient alors les valeurs d'offset OL par vis de réglage 22, ce qui est représenté à la Figure 4C.
- Dans le cas idéal, les valeurs d'offset lithographique sont identiques pour l'ensemble des vis de réglage 22. Dans la réalité, elles varient d'une vis de réglage à l'autre en fonction du décalage angulaire α entre les axes X-X, Y-Y.
- Ensuite, lors d'une étape 102, les valeurs d'offset sont converties en une courbe linéaire DL, par exemple par régression linéaire. Cette courbe DL est inclinée d'un angle β par rapport à l'abscisse. La courbe DL définit également un offset lithographique côté fonction OLCF et un offset lithographique côté commande OLCC aux deux extrémités de la largeur d'impression L.
- Dans une étape 104, les valeurs d'offset lithographique OLCF et OLCC sont converties en les distances entre le rouleau preneur pelliculaire 16 et le rouleau d'encrier 18 aux deux extrémités de la largeur d'impression εCF et εCC.
- Comme la valeur d'offset lithographique est proportionnelle à la distance réelle s entre le rouleau d'encrier 18 et le rouleau preneur pelliculaire 16 à l'emplacement de la vis de réglage 22 concerné, la formule suivante est utilisé à cet effet ε=a.OffsetLithographigue OL [%] + b où
a et b sont des constantes caractéristiques de l'ouverture de l'encrier et sont déterminés pour chaque dispositif d'encrage. a est par exemple égal à 0,6 et b est par exemple égal à 0,03 mm. - Par ailleurs, le décalage angulaire réel α entre l'axe X-X et l'axe Y-Y est calculé selon la formule suivante :

- Cette déviation angulaire α et/ou les distances réelles εCF et εCC de chaque extrémité entre le rouleau preneur pelliculaire 16 et le rouleau d'encrier 18 sont transformées en un signal qui est transmis par la ligne 37 au second micro-contrôleur 34B.
- Lors d'une étape 106, les valeurs εCF et εCC sont comparées à une valeur de consigne εconsigne qui correspond à des axes X-X et Y-Y parallèles et de préférence également à une distance des rouleaux à laquelle les valeurs d'offset lithographique sont identiques à un offset lithographique de consigne.
- En fonction de cette comparaison, lors d'une étape 108, un ou les deux moteurs 46 sont entraînés en réduisant le décalage angulaire réel, jusqu'à ce que l'axe X-X soit parallèle à l'axe Y-Y et/ou jusqu'à ce que la distance réelle entre les rouleaux soit identique à la distance de consigne εconsigne.
- En variante, l'un ou les deux moteurs 46 sont entraînés de telle sorte que le décalage angulaire est réduit, mais pas jusqu'au parallélisme complet des deux axes Y-Y et X-X.
- En variante, la déviation angulaire α, et donc le décalage angulaire réel, est comparé à une déviation angulaire de seuil prédéterminée qui est supérieur à 0°. Ensuite, uniquement lorsque la déviation angulaire est supérieure à la déviation de seuil, le décalage angulaire est réduit ou amené à zéro. Ainsi, une modification d'un non parallélisme négligeable entre les deux axes X-X et Y-Y est évitée.
- De préférence, les moyens de commande 30 attendent la terminaison de la commande en cours avant d'entraîner les moteurs 46. Une fois l'axe X-X réglé parallèlement à l'axe Y-Y, la commande suivante peut être commencée. Ainsi, l'influence d'une modification de la position des vis de réglage 22 lors de la commande en cours peut être évitée.
- Une variante perfectionnée du mode opératoire du dispositif d'encrage est la suivante.
- Les valeurs d'offset respectives de chaque vis par encrage calculées selon le mode opératoire précédant, sont stockées dans une mémoire non-réprésentée pour les n derniers commandes d'impression
- A partir de ces valeurs, le micro-contrôleur 34A évalue les valeurs représentatives des n derniers travaux du décalage angulaire entre l'axe X-X du rouleau preneur 16 et l'axe Y-Y du rouleau d'encrier 18, ainsi que de la distance εCC et εCF entre le rouleau d'encrier et le rouleau preneur pelliculaire aux deux extrémités de la largeur d'impression. Des signaux représentant ces valeurs sont envoyés via la ligne 37 vers le microcontrôleur 34B.
- Ensuite, le microcontrôleur 34B asservie les moteurs 46 en vue de réduire le décalage angulaire α, de manière analogue à celle décrite ci-dessus et de positionner le rouleau preneur pelliculaire à la distance de consigne du rouleau d'encrier.
- La réduction du décalage angulaire α engendre une modification des offsets lithographiques des vis de réglage 22. En conséquence, dans le cas du dispositif d'encrage de la Figure 3A, une fois les axes X-X et Y-Y sont parallèles, le microcontrôleur 34B règle chacune des vis de réglage 22 à leur nouvelle position de offset lithographique. Ensuite, cette position est relevée par le microcontrôleur 34A et stockée dans une mémoire non représentée. Ainsi, cette nouvelle position d'offset stockée est utilisée pour le réglage de la quantité d'encre devant être transférée sur le rouleau preneur 16.
- Selon une variante non représentée, la ligne de sortie 37 est reliée à une unité d'affichage qui est adaptée pour afficher une valeur de décalage représentant le décalage angulaire des axes X-X et Y-Y. Selon cette variante, les moyens de commande 30 sont actionnés par un opérateur en fonction de la valeur affichée. Dans ce mode de réalisation, les moyens de commande 30 peuvent comprendre des vis micrométriques qui remplacent les moteurs 46, les tiges taraudées 48 et les douilles taraudées 50 du mode de réalisation décrit ci-dessus.
Claims (15)
- Dispositif d'encrage d'une unité d'impression (2), du type comprenant :- un réservoir d'encre (14),- un rouleau preneur pelliculaire (16) ayant un premier axe (X-X),- un rouleau d'encrier (18) définissant une largeur d'impression (L), adapté pour transférer de l'encre du réservoir d'encre (14) au rouleau preneur pelliculaire(16) et ayant un second axe (Y-Y),caractérisé en ce qu'il comprend des moyens de détection (28) adaptés pour évaluer la distance réelle entre le rouleau preneur et le rouleau preneur pelliculaire (16) dans la largeur d'impression (L) et/ou pour détecter un décalage angulaire des deux axes (X-X, Y-Y) l'un par rapport à l'autre et pour fournir un signal de sortie représentant ce décalage angulaire.
- Dispositif d'encrage selon la revendication 1, caractérisé en ce qu'il comprend des moyens de commande (30) adaptés pour déplacer angulairement le second axe (Y-Y) par rapport au premier axe (X-X), et en ce que les moyens de commande (30) sont adaptés pour réduire le décalage angulaire en fonction du signal de sortie.
- Dispositif d'encrage selon la revendication 1 ou 2, caractérisé en ce que qu'il comprend des moyens de commande (30) adaptés pour positionner le rouleau preneur pelliculaire (16) par rapport au rouleau d'encrier (18) en fonction du signal de sortie
- Dispositif d'encrage selon l'une quelconque des revendications précédentes, caractérisé en ce que les moyens de détection (28) comprennent au moins un capteur (32) adapté pour révéler la densité de l'encre imprimée sur un support à imprimer (8) en au moins deux emplacements différents sur la largeur d'impression (L).
- Dispositif d'encrage selon l'une quelconque des revendications précédentes, caractérisé en ce qu'il comporte au moins deux vis de réglage (22) de l'épaisseur d'encre sur le rouleau d'encrier (18).
- Dispositif d'encrage selon la revendication 5, caractérisé en ce que les moyens de détection (28) sont adaptés pour détecter la position des vis de réglage (22).
- Dispositif d'encrage selon la revendication 6, caractérisé en ce que les moyens de détection (28) sont adaptés pour détecter la position d'au moins l'une des vis de réglage (22) correspondant à l'offset lithographique.
- Dispositif d'encrage selon la revendication 7, caractérisé en ce qu'il comporte en outre une mémoire et des moyens adaptés pour stocker une valeur représentant la position d'offset lithographique dans la mémoire lorsque les axes (X-X, Y-Y) des rouleaux d'encrier (18) et de preneur (16) sont parallèles.
- Dispositif d'encrage selon l'une quelconque des revendications précédentes, caractérisé en ce que les moyens de commande (30) comportent un premier moteur (46) et des premiers moyens de transmission (48, 50), adaptés pour transmettre un entraînement du premier moteur (46) en un déplacement angulaire du premier axe (X-X) par rapport au second axe (Y-Y).
- Dispositif d'encrage selon la revendication 9, caractérisé en ce que les moyens de commande (30) comprennent un second moteur (46) et des second moyens de transmission (48, 50), adaptés pour transmettre un entraînement du second moteur (46) en un déplacement angulaire du premier axe (X-X) par rapport au second axe (Y-Y).
- Dispositif d'encrage selon la revendication 9 ou 10, caractérisé en ce que le ou chaque moyen de transmission (48, 50) est adapté pour déplacer une extrémité du rouleau preneur (16) radialement par rapport au second axe (Y-Y).
- Dispositif d'encrage selon l'une des revendications 1 à 8, caractérisé en ce que les moyens de commande (30) comportent des moyens de commande manuel, notamment une vis micrométrique.
- Procédé d'ajustement d'un dispositif d'encrage d'une unité d'impression, caractérisé en ce que le dispositif d'encrage est un dispositif selon l'une quelconque des revendications précédentes et en ce que le procédé comprend les étapes suivantes :a) déterminer la distance réelle (εCF, εCC) entre le rouleau preneur pelliculaire (16) et le rouleau d'encrier (18) en au moins deux points de la largeur d'impression (L) et/ou déterminer le décalage angulaire réel des premier (X-X) et second (Y-Y) axes l'un par rapport à l'autre,b) déplacer le premier axe (X-X) par rapport au second axe (Y-Y) en réduisant le décalage angulaire réel et/ou en modifiant la position relative radiale du premier axe (X-X) par rapport au second axe (Y-Y).
- Procédé d'ajustement selon la revendication 13, caractérisé par les étapes suivantes :c) vérification si le décalage angulaire réel est supérieur à un décalage de seuil et/ou vérifier si la distance réelle (εCF, εCC) est supérieure à une distance de seuil,d) mettre l'étape b) en oeuvre uniquement lorsque le décalage angulaire réel est supérieur au décalage de seuil et /ou lorsque la distance réelle (εCF, εCC) est supérieure à la distance de seuil.
- Procédé d'ajustement selon la revendication 13 ou 14, caractérisé par les étapes suivantes :e) après l'étape b), déterminer l'offset lithographique d'au moins une vis de réglage (22) ; etf) mémoriser l'offset lithographique ainsi déterminée dans une mémoire.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0513273A FR2895310B1 (fr) | 2005-12-23 | 2005-12-23 | Dispositif d'encrage et procede d'ajustement correspondant |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1800863A1 true EP1800863A1 (fr) | 2007-06-27 |
| EP1800863B1 EP1800863B1 (fr) | 2008-12-10 |
Family
ID=37037075
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP06291983A Not-in-force EP1800863B1 (fr) | 2005-12-23 | 2006-12-19 | Dispositif d'encrage et procédé d'ajustement correspondant |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7984673B2 (fr) |
| EP (1) | EP1800863B1 (fr) |
| JP (1) | JP2007168441A (fr) |
| CN (1) | CN1986220B (fr) |
| DE (1) | DE602006004151D1 (fr) |
| FR (1) | FR2895310B1 (fr) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8763528B2 (en) | 2010-12-09 | 2014-07-01 | Goss International Americas, Inc. | Closed loop color control of selected regions using solid color regions within images |
| EP2818319B1 (fr) * | 2013-06-28 | 2015-08-05 | CONPRINTA GmbH & Co. KG | Elément d'impression |
| US9421756B1 (en) * | 2015-04-23 | 2016-08-23 | Eastman Kodak Company | Roller contact adjustment for flexographic printing system |
| CN105034588B (zh) * | 2015-08-31 | 2017-05-03 | 南通市乐悦实业有限公司 | 防结皮的印刷机墨斗装置 |
| CN109397874B (zh) * | 2018-12-13 | 2020-11-10 | 嘉兴艾科新材料科技有限公司 | 一种凹版印刷机用油墨槽 |
| CN110605902B (zh) * | 2019-10-25 | 2021-01-26 | 昆山市生力包装印务有限公司 | 一种凹版印刷机 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5355796A (en) * | 1992-04-04 | 1994-10-18 | Man Roland Druckmaschinen Ag | Anilox offset printing unit with a short inking device |
| GB2411150A (en) * | 2004-02-19 | 2005-08-24 | Roland Man Druckmasch | Positioning a roller on an inking or damping unit of a rotary press |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2568761A (en) * | 1946-03-22 | 1951-09-25 | Miehle Printing Press & Mfg | Pressure adjustment and trip for printing cylinders |
| US3869984A (en) * | 1973-08-06 | 1975-03-11 | Addressograph Multigraph | Fluid film thickness sensor and control system for utilizing same |
| DE2609513C3 (de) * | 1976-03-08 | 1979-03-29 | Windmoeller & Hoelscher, 4540 Lengerich | Vorrichtung zum An- und Abstellen eines auf den Formzylinder einer Tiefdruckmaschine wirkenden Presseurs Windmoller & Hölscher, 4540 Len¬ |
| DE3238912C1 (de) * | 1982-10-21 | 1984-03-15 | M.A.N.- Roland Druckmaschinen AG, 6050 Offenbach | Vorrichtung zum zonenweisen Abtasten der Einfaerbung eines Plattenzylinders einer Rotations-Offsetdruckmaschine |
| CH679919A5 (fr) * | 1989-10-23 | 1992-05-15 | Patric Albiez | |
| JP2585995Y2 (ja) * | 1992-10-01 | 1998-11-25 | 株式会社小森コーポレーション | 胴着脱装置 |
| JP3718275B2 (ja) * | 1996-01-12 | 2005-11-24 | 株式会社小森コーポレーション | 印刷機 |
| US5967049A (en) * | 1997-05-05 | 1999-10-19 | Quad/Tech, Inc. | Ink key control in a printing press including lateral ink spread, ink saturation, and back-flow compensation |
| US6347585B1 (en) * | 1998-08-04 | 2002-02-19 | Goss Graphic Systems, Inc. | Variable gap stabilizer |
| DE19911568A1 (de) * | 1999-03-16 | 2000-09-21 | Heidelberger Druckmasch Ag | Verfahren zum Einfeuchten einer Flachdruckform und Feuchtwerk einer Flachdruckmaschine |
| DE10021540A1 (de) * | 2000-05-03 | 2001-11-08 | Koenig & Bauer Ag | Anordnung zur Einstellung eines Abstandes von Rotationsachsen von Zylindern |
-
2005
- 2005-12-23 FR FR0513273A patent/FR2895310B1/fr not_active Expired - Fee Related
-
2006
- 2006-12-15 US US11/640,416 patent/US7984673B2/en not_active Expired - Fee Related
- 2006-12-19 EP EP06291983A patent/EP1800863B1/fr not_active Not-in-force
- 2006-12-19 CN CN200610169044.2A patent/CN1986220B/zh not_active Expired - Fee Related
- 2006-12-19 DE DE602006004151T patent/DE602006004151D1/de active Active
- 2006-12-25 JP JP2006348451A patent/JP2007168441A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5355796A (en) * | 1992-04-04 | 1994-10-18 | Man Roland Druckmaschinen Ag | Anilox offset printing unit with a short inking device |
| GB2411150A (en) * | 2004-02-19 | 2005-08-24 | Roland Man Druckmasch | Positioning a roller on an inking or damping unit of a rotary press |
Also Published As
| Publication number | Publication date |
|---|---|
| FR2895310B1 (fr) | 2009-04-17 |
| US7984673B2 (en) | 2011-07-26 |
| US20070151470A1 (en) | 2007-07-05 |
| CN1986220A (zh) | 2007-06-27 |
| DE602006004151D1 (de) | 2009-01-22 |
| JP2007168441A (ja) | 2007-07-05 |
| FR2895310A1 (fr) | 2007-06-29 |
| CN1986220B (zh) | 2013-11-06 |
| EP1800863B1 (fr) | 2008-12-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1132203B1 (fr) | Procede de mise en reperage automatique d'impressions dans une machine rotative et dispositif pour la mise en oeuvre du procede | |
| EP0616886B1 (fr) | Installation pour l'impression feuille à feuille et ligne d'impression correspondante | |
| JP5013540B2 (ja) | ベルト搬送装置 | |
| FR2553032A1 (fr) | Presse d'impression flexographique a entrainement en prise directe et materiau d'emballage ainsi imprime | |
| FR2624432A1 (fr) | Imprimeuse | |
| EP1800863B1 (fr) | Dispositif d'encrage et procédé d'ajustement correspondant | |
| EP0500467B1 (fr) | Procédé de contrÔle en continu d'une bande sans fin et machine pour la mise en oeuvre de ce procédé | |
| FR2813036A1 (fr) | Machine rotative d'impression offset, equipee d'un systeme de determination des donnees de prereglage pour le registre de coupe et/ou le registre des couleurs | |
| EP1820647B1 (fr) | Machine et procédé de marquage de pièces de forme | |
| FR2577539A1 (fr) | Dispositif pour regler la position d'une bande deplacee en continu, par exemple d'une bande de papier sur des machines a imprimer rotatives | |
| EP0665104B2 (fr) | Procédé et installation pour l'impression feuille à feuille | |
| EP0972639B1 (fr) | Dispositif de positionnement d'un cliché flexible sur un cylindre porte-cliché | |
| EP1938972B1 (fr) | Presse d'impression offset à réglage du registre de coupe et procédé correspondant | |
| US6752013B2 (en) | Device and method for web tension measurement | |
| EP0855272B1 (fr) | Tête d'impression postale munie d'un dispositif de réglage d'alignement | |
| EP1961569A1 (fr) | Dispositif et procédé de réglage pour machine d'impression rotative | |
| US6851367B2 (en) | Web handling cylinder with modulated tension loss | |
| JPH11272094A (ja) | カラー画像形成装置 | |
| BE1003608A6 (fr) | Imprimante couleur d'etiquettes. | |
| US6736063B2 (en) | Printing apparatus | |
| EP1782953B1 (fr) | Procédé de réglage de la quantité d'encre appliquée sur un produit à imprimer et dispositif correspondant | |
| EP4316987B1 (fr) | Procede de determination de la position d'un dispositif d'actionnement, dispositif d'actionnement correspondant | |
| EP2300231A1 (fr) | Unité d'impression avec deux dispositifs d'écartement et utilisation correspondante | |
| FR2676129A1 (fr) | Procede destine a positionner un objet par rapport a un element a emplacement determine ou vice et versa et machine pour sa mise en óoeuvre. | |
| US20070000399A1 (en) | Printing apparatus and printing method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| 17P | Request for examination filed |
Effective date: 20071002 |
|
| AKX | Designation fees paid |
Designated state(s): CH DE FR GB IT LI |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): CH DE FR GB IT LI |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REF | Corresponds to: |
Ref document number: 602006004151 Country of ref document: DE Date of ref document: 20090122 Kind code of ref document: P |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20090911 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20101210 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20101123 Year of fee payment: 5 Ref country code: IT Payment date: 20101221 Year of fee payment: 5 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20111219 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111219 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111231 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111219 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20130110 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20121231 Year of fee payment: 7 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602006004151 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20140829 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602006004151 Country of ref document: DE Effective date: 20140701 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140701 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20131231 |