EP1548287B1 - Dispositif de commande en position d'un actionneur hydraulique et plaque interface de servovalve mettant en oeuvre un tel dispositif - Google Patents
Dispositif de commande en position d'un actionneur hydraulique et plaque interface de servovalve mettant en oeuvre un tel dispositif Download PDFInfo
- Publication number
- EP1548287B1 EP1548287B1 EP04292928A EP04292928A EP1548287B1 EP 1548287 B1 EP1548287 B1 EP 1548287B1 EP 04292928 A EP04292928 A EP 04292928A EP 04292928 A EP04292928 A EP 04292928A EP 1548287 B1 EP1548287 B1 EP 1548287B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- servovalve
- actuator
- hydraulic
- circuit
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000011144 upstream manufacturing Methods 0.000 claims abstract description 5
- 239000012530 fluid Substances 0.000 claims description 14
- 238000010586 diagram Methods 0.000 description 4
- 230000036461 convulsion Effects 0.000 description 2
- 235000021183 entrée Nutrition 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B13/00—Details of servomotor systems ; Valves for servomotor systems
- F15B13/02—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors
- F15B13/06—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors for use with two or more servomotors
- F15B13/08—Assemblies of units, each for the control of a single servomotor only
- F15B13/0803—Modular units
- F15B13/0807—Manifolds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/003—Systems with load-holding valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/2053—Type of pump
- F15B2211/20546—Type of pump variable capacity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/305—Directional control characterised by the type of valves
- F15B2211/30505—Non-return valves, i.e. check valves
- F15B2211/3051—Cross-check valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/305—Directional control characterised by the type of valves
- F15B2211/30525—Directional control valves, e.g. 4/3-directional control valve
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/31—Directional control characterised by the positions of the valve element
- F15B2211/3105—Neutral or centre positions
- F15B2211/3111—Neutral or centre positions the pump port being closed in the centre position, e.g. so-called closed centre
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/31—Directional control characterised by the positions of the valve element
- F15B2211/3144—Directional control characterised by the positions of the valve element the positions being continuously variable, e.g. as realised by proportional valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/315—Directional control characterised by the connections of the valve or valves in the circuit
- F15B2211/3157—Directional control characterised by the connections of the valve or valves in the circuit being connected to a pressure source, an output member and a return line
- F15B2211/31576—Directional control characterised by the connections of the valve or valves in the circuit being connected to a pressure source, an output member and a return line having a single pressure source and a single output member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/32—Directional control characterised by the type of actuation
- F15B2211/327—Directional control characterised by the type of actuation electrically or electronically
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/32—Directional control characterised by the type of actuation
- F15B2211/329—Directional control characterised by the type of actuation actuated by fluid pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/405—Flow control characterised by the type of flow control means or valve
- F15B2211/40507—Flow control characterised by the type of flow control means or valve with constant throttles or orifices
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/415—Flow control characterised by the connections of the flow control means in the circuit
- F15B2211/41581—Flow control characterised by the connections of the flow control means in the circuit being connected to an output member and a return line
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/46—Control of flow in the return line, i.e. meter-out control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/705—Output members, e.g. hydraulic motors or cylinders or control therefor characterised by the type of output members or actuators
- F15B2211/7051—Linear output members
- F15B2211/7053—Double-acting output members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/75—Control of speed of the output member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/765—Control of position or angle of the output member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/80—Other types of control related to particular problems or conditions
- F15B2211/88—Control measures for saving energy
Definitions
- the technical field of the invention is that of devices for controlling in position a hydraulic actuator.
- These devices usually comprise a hydraulic circuit incorporating a pump (for example variable displacement) which feeds one or the other of the two chambers of the actuator via a servovalve.
- a pump for example variable displacement
- Such a device comprises a hydraulic circuit comprising a pump feeding from a cover the two chambers of the actuator via a servovalve.
- Each channel of the servo valve is connected to a chamber of the actuator via a check valve and the output channels of the servo valve are also connected to the tank by a calibrated nozzle.
- the US-3763889 discloses a hydraulic distribution system comprising a set of three plates welded together and providing an interface plate for applying to one or more multi-way directional valves. This patent discloses neither a reserve cover outlet nor a leakage circuit.
- the servovalve is a standard commercial component that includes a movable drawer by the action of a torque motor.
- This drawer can occupy at least three different positions: a central position in which the circuits are closed and two symmetrical positions for connecting one or the other of the chambers of the actuator to the hydraulic pump while the other chamber is connected to a sheet or hydraulic reserve.
- the slide can also occupy, depending on the command given by the torque motor, any intermediate position between the central position and one or the other of the extreme positions, each intermediate position corresponding to a different fluid flow rate delivered by the servovalve.
- Such a servovalve is used in a conventional manner in closed-loop actuator controls, ie controls with position control. It is also possible to use such a servo valve for open loop actuator control, ie without position control.
- the actuator is a cylinder ensuring the pointing of a weapon in site
- the rally angle obtained site is wrong compared to the given instruction and the weapon is poorly pointed.
- the object of the invention is to overcome such drawbacks by proposing a control device in the position of a hydraulic actuator enabling control both in closed loop in open loop while ensuring the accuracy of positioning and speed of rallying.
- the invention also makes it possible to ensure this positioning with standard components of commerce and inexpensive.
- the subject of the invention is a control device in the position of a hydraulic actuator, the device comprising a hydraulic circuit comprising a pump supplying the two chambers of the actuator via a cover or hydraulic reserve via a servovalve, each output channel of the servovalve being connected to a chamber of the actuator via a check valve, at least one of the output channels of the servovalve which is connected to a chamber of the actuator being also connected to the hydraulic cover by a calibrated nozzle upstream of the non-return valve, characterized in that the device further comprises a servovalve interface plate comprising at least four transverse holes intended cooperating with the four openings or hydraulic connections (A, B, P, T) of the servovalve, that is to say a supply of fluid under pressure from a pump, an outlet to a reserve tank, a first control channel of a first chamber of the actuator and a second control channel of a second chamber of the actuator, said plate comprising at least one leakage circuit connecting one of the control channels to the
- the plate comprises two leakage circuits comprising a calibrated nozzle, each circuit connecting one of the control channels to the tarpaulin outlet.
- the leakage circuit or circuits are made in the form of holes perpendicular to each other and perpendicular to the transverse bores corresponding to the different channels.
- the outlet of each hole outside the plate is closed by a plug.
- the nozzle or jets are made in the form of screws comprising a calibrated axial orifice.
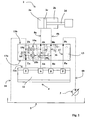
- the figure 1 represents the diagram of a device 1 for controlling the position of a hydraulic actuator 2, for example a jack comprising a piston 2c integral with a rod 2d and delimiting two chambers 2a and 2b.
- the cylinder ensures the positioning in site or in the field of a weapon tube (not shown).
- This device comprises a hydraulic circuit incorporating a pump 3 which feeds the two chambers 2a, 2b of the actuator 2 via a servovalve 4.
- connection T is intended for the return to the cover 5, the input connection P to the supply of fluid from the pump 3, the connections of output A and B being intended to connect the servovalve 4 to the two chambers 2a and 2b of the cylinder 2.
- the pump 3 is thus connected by an upstream pipe 6a to the hydraulic tank 5 (or reserve of fluid) and it flows through a downstream pipe 6b to the inlet connection P of the servovalve 4.
- the servovalve 4 is conventionally represented on the figure 1 in its closed position (central block 4c in the circuit) in which the four connections A, B, P and T are closed.
- the movements of the servovalve spool are controlled conventionally by a torque motor 4d integrated into the servovalve, a torque motor which is controlled by an electronic control unit 7.
- the extreme positions 4a, 4b correspond to the maximum fluid flow rates provided by the servovalve.
- the drawer can conventionally occupy intermediate positions between the closed position and one or the other of the two extreme positions. These intermediate positions correspond to different fluid flows transmitted according to one or other of the control channels.
- the output connections A and B of the servovalve 4 are connected by ducts 8a and 8b to the chambers 2a and 2b of the cylinder 2 via two controlled check valves 9a, 9b.
- valves are represented here in the form of a single hydraulic block 9 having four outputs C, D, E and F.
- Each valve 9a, 9b comprises a ball applied to a seat by the pressure on the side of the actuator 2 The ball can be moved away from the seat by a control pressure.
- the valve 9a is interposed between the outputs C and E and connects the chamber 2a of the actuator and the connection A of the servovalve 4.
- the valve 9b is interposed between the outputs D and F and connects the chamber 2b of the actuator and the connection B of the servovalve 4. Hydraulic connections 9c and 9d (shown in dashed lines) provide the control of the valves 9b and 9a respectively.
- a pressure inlet D flows naturally towards F through the valve 9b and also raises the ball of the valve 9a thereby allowing a fluid passage from E to C.
- a pressure inlet C flows to E and allows a fluid passage from F to D.
- valves 9a and 9b make it possible to hold the jack 2 in position when it is controlled in an open loop or in a closed loop.
- a first nozzle 10a is connected by a pipe 11a to the pipe 8a and it drifts towards the tank 5 a portion of the fluid flowing therein.
- a second nozzle 10b is connected by a pipe 11b to the pipe 8b and it drifts towards the tank 5 a portion of the fluid flowing in it.
- the nozzles will consist of well defined nozzle sizes.
- the gauges will be chosen so as to ensure a pressure drop in line 8a or 8b which is inactive without reducing the flow in the pipe 8b or 8a which controls the movement.
- leakage sections will be chosen for the nozzles which will make it possible to ensure a leakage rate of between 4% and 7% of the flow rate of fluid supplied by the pump 3.
- the nozzles 10a and 10b do not therefore disturb the normal operation of the servovalve 4 because they do not cause significant loss of flow in a pipe fed by the pump 3.
- the pressure in the lines 8a and 8b at the inputs C and D is lower than that which is respectively at the inputs E and F.
- the balls therefore remain applied on their seats and avoids any rebound which would lead to a jerk positioning of the cylinder.
- the pointing is thus obtained with precision during positioning servo positioning of the closed-loop cylinder and the position is maintained without drift during an open-loop servocontrol.
- the figure 2 shows a simplified hydraulic diagram of the interface plate 13 and the figures 3a , 3b and 3c show a particular embodiment of this interface plate.
- a servovalve 4 is concretely made in the form of a component comprising a parallelepipedal base 12 which carries on the same upper face 12a the openings (or connections) of inputs and outputs A, B, T and P.
- the interface plate 13 is also made in the form of a parallelepiped block, a lower face 13a is intended to be applied to the face 12a of the servovalve.
- This face comprises four openings Ta, Aa, Ba and Pa intended to be facing respective openings T, A, B and P of the servovalve 4.
- each opening (Ta, Aa, Ba , Pa) of the interface plate 13 comprises a counterbore which accommodates an O-ring. This seal will be applied during assembly against the face 12a of the servovalve and will seal.
- An upper face 13b of the plate 13 carries four openings Tb, Ab, Bb and Pb on which will be connected the different pipes of the hydraulic circuit.
- the pipes 8a and 8b which lead to the jack are fixed to the openings Ab and Bb, the pipe 6b which comes from the pump 3 is fixed to the opening Pb and the pipe 18 which returns to the hydraulic tank 5 is fixed to the opening Tb.
- Fasteners are made with appropriate hydraulic connections.
- the different openings of the lower face 13a are connected to the openings of the upper face 13b by bores machined in the material of the plate 13.
- the opening Ta is connected to the opening Tb by the bore 14
- the opening Aa is connected to the opening Ab by the bore 15
- the opening Ba is connected to the opening Bb by the bore 16
- the opening Pa is connected to opening Pb by piercing 17.
- a first controlled hydraulic leakage circuit 19a is formed by a channel on which is disposed the nozzle 10a, and which connects the bore 15 and the bore 14.
- the plate also contains a second leakage circuit 19b formed by another channel on which is disposed the nozzle 10b. This second leakage circuit 19b connects the piercing 16 and the piercing 14.
- the plate 13 makes it possible to convert the servovalve 4 in an extremely simple manner to add the nozzles proposed by the invention.
- the hydraulic circuit can therefore easily be modified without the need for additional pipes.
- the leakage circuits 19a and 19b are in the form of orthogonal holes. Such an arrangement makes it easier to manufacture the interface plate 13.
- the holes are made in two parallel planes.
- the AA plan ( figure 3a ) comprises two orthogonal holes 19a1 and 19a2 which form the first leak circuit 19a.
- the hole 19a2 contains the first nozzle 10a which is in the form of a screw having a calibrated axial orifice.
- the plan BB ( figure 3b ) comprises four holes 19b1, 19b2, 19b3 and 19b4 which are orthogonal two by two and thus form a rectangle. These four holes constitute the second leakage circuit 19b.
- the hole 19b1 contains the second nozzle 10b which is also made in the form of a screw with a calibrated axial orifice.
- Holes 21 passing through the interface plate 13 from one side to the other are provided to allow the plate to be fixed to the servovalve 4 by screws (not shown).
- This variant makes it possible to accelerate in a preferential manner one of the movements of the jack.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Fluid-Pressure Circuits (AREA)
- Servomotors (AREA)
Description
- Le domaine technique de l'invention est celui des dispositifs permettant la commande en position d'un actionneur hydraulique.
- Ces dispositifs comprennent habituellement un circuit hydraulique incorporant une pompe (par exemple à cylindrée variable) qui alimente l'une ou l'autre des deux chambres de l'actionneur par l'intermédiaire d'une servovalve.
- On connaît déjà par le
brevet US3184920 un dispositif de commande en position d'un actionneur hydraulique. Un tel dispositif comporte un circuit hydraulique comprenant une pompe alimentant à partir d'une bâche les deux chambres de l'actionneur par l'intermédiaire d'une servovalve. Chaque voie de la servovalve étant reliée à une chambre de l'actionneur par l'intermédiaire d'un clapet antiretour et les voies de sortie de la servovalve sont également reliées à la bâche par un gicleur calibré. - Un tel dispositif présente cependant l'inconvénient de nécessiter une réalisation spécifique et coûteuse de chaque élément.
- La revue « Der Hydraulik Trainer Band 1 concerne les moteurs hydrauliques et on indique que les fonctions nécessaires dans la chaîne de transmission d'un actionneur hydraulique sont réalisées au moyen de différentes valves set que ces différentes fonctions peuvent être réunies dans une même plaque hydraulique. Aucune alimentation complète en fluide sous pression n'est décrite, ni un circuit de fuite, ni un gicleur calibré, ni clapet anti-retour.
- Le
brevet US-3763889 décrit un système de distribution hydraulique comportant un ensemble de trois plaques soudées ensemble et réalisant une plaque interface destinée à s'appliquer à une ou plusieurs valves directionnelles à plusieurs voies. Ce brevet ne décrit ni une sortie de bâche de réserve, ni un circuit de fuite. - La servovalve est un composant classique du commerce qui comprend un tiroir mobile par l'action d'un moteur couple. Ce tiroir peut occuper au moins trois positions différentes: une position centrale dans laquelle les circuits sont fermés et deux positions symétriques permettant de relier l'une ou l'autre des chambres de l'actionneur à la pompe hydraulique tandis que l'autre chambre est reliée à une bâche ou réserve hydraulique. Le tiroir peut également occuper, en fonction de la commande donnée par le moteur couple, n'importe quelle position intermédiaire entre la position centrale et l'une ou l'autre des positions extrêmes, chaque position intermédiaire correspondant à un débit de fluide différent délivré par la servovalve.
- Une telle servovalve est utilisée d'une façon classique dans les commandes d'actionneurs en boucle fermée, c'est à dire les commandes avec asservissement de position. On peut également utiliser une telle servovalve pour une commande d'actionneur en boucle ouverte c'est à dire sans asservissement de position.
- Dans tous les cas, afin d'éviter un maintien de la pompe hydraulique en fonctionnement permanent, on dispose généralement un clapet antiretour piloté entre chaque chambre de l'actionneur et la servovalve. Ainsi la pression qui règne dans chaque chambre de l'actionneur se trouve maintenue indépendamment du niveau de l'alimentation. Ce clapet permet par ailleurs d'améliorer la précision du positionnement de l'actionneur en boucle ouverte. Cependant cette solution présente des inconvénients, aussi bien lors d'un fonctionnement en boucle fermée qu'en boucle ouverte. En effet les sections des chambres de l'actionneur sont différentes (en raison notamment de la présence de la tige du vérin dans une des chambres). Il en résulte un petit à-coup en fin de ralliement qui conduit à une imprécision au niveau du positionnement final de l'actionneur.
- Ainsi lorsque l'actionneur est un vérin assurant le pointage d'une arme en site, l'angle de ralliement en site obtenu est erroné par rapport à la consigne donnée et l'arme est mal pointée.
- Par ailleurs lors d'un fonctionnement en boucle ouverte on observe une dérive de positionnement de l'actionneur.
- L'invention a pour but de pallier de tels inconvénients en proposant un dispositif de commande en position d'un actionneur hydraulique permettant une commande aussi bien en boucle fermée qu'en boucle ouverte tout en assurant la précision du positionnement et la vitesse du ralliement.
- L'invention permet également d'assurer ce positionnement avec des composants standards du commerce et peu coûteux.
- Ainsi l'invention a pour objet un dispositif de commande en position d'un actionneur hydraulique, dispositif comprenant un circuit hydraulique comprenant une pompe alimentant à partir d'une bâche ou réserve hydraulique les deux chambres de l'actionneur par l'intermédiaire d'une servovalve, chaque voie de sortie de la servovalve étant reliée à une chambre de l'actionneur par l'intermédiaire d'un clapet antiretour, au moins une des voies de sortie de la servovalve qui est raccordée à une chambre de l'actionneur étant également reliée à la bâche hydraulique par un gicleur calibré en amont du clapet antiretour, caractérisé en ce que le dispositif comporte en outre une plaque interface de servovalve comportant au moins quatre perçages transversaux destinés coopérant avec les quatre ouvertures ou connexions hydrauliques (A, B, P, T) de la servovalve, c'est-à-dire une alimentation en fluide sous pression à partir d'une pompe, une sortie vers une bâche de réserve, une première voie de commande d'une première chambre de l'actionneur et une seconde voie de commande d'une seconde chambre de l'actionneur, ladite plaque comportant au moins un circuit de fuite reliant une des voies de commande à la sortie bâche, circuit dans lequel est disposé ledit gicleur calibré.
- Selon une caractéristique du dispositif de commande, la plaque comporte deux circuits de fuite comprenant un gicleur calibré, chaque circuit reliant une des voies de commande à la sortie bâche.
- Selon une autre caractéristique du dispositif de commande, le ou les circuits de fuite sont réalisés sous 1a forme de trous perpendiculaires les uns aux autres et perpendiculaires aux perçages transversaux correspondants aux différentes voies.
- Selon encore une autre caractéristique du dispositif de commande, le débouché de chaque trou à l'extérieur de la plaque est obturé par un bouchon.
- Selon encore une autre caractéristique du dispositif de commande, le ou les gicleurs sont réalisés sous la forme de vis comprenant un orifice axial calibré.
- D'autres caractéristiques, détails et avantages de l'invention apparaîtront à la lecture de la description qui va suivre d'un mode particulier de réalisation de l'invention, description faite en référence aux dessins annexés et dans lesquels :
- la
figure 1 est un schéma hydraulique simplifié d'un dispositif de commande selon l'invention, - la
figure 2 est un schéma simplifié de la plaque interface selon l'invention, - les
figures 3a ,3b et3c sont trois vues d'un mode de réalisation d'une plaque interface, lesfigures 3a et3b étant des coupes suivant respectivement les plans AA et BB visibles sur lafigure 3c . - La
figure 1 représente le schéma d'un dispositif 1 de commande en position d'un actionneur hydraulique 2, par exemple un vérin comprenant un piston 2c solidaire d'une tige 2d et délimitant deux chambres 2a et 2b. Le vérin assure le positionnement en site ou en gisement d'un tube d'arme (non représenté). Ce dispositif comprend un circuit hydraulique incorporant une pompe 3 qui alimente les deux chambres 2a, 2b de l'actionneur 2 par l'intermédiaire d'une servovalve 4. - Cette dernière est une servovalve classique du commerce dite à "centre fermé - départ fermé".
- Elle comporte quatre connexions notées de façon conventionnelle A, B, P et T. La connexion T est destinée au retour vers la bâche 5, la connexion d'entrée P à l'alimentation en fluide à partir de la pompe 3, les connexions de sortie A et B étant destinées à relier la servovalve 4 aux deux chambres 2a et 2b du vérin 2.
- La pompe 3 se trouve ainsi reliée par une canalisation amont 6a à la bâche hydraulique 5 (ou réserve de fluide) et elle débite par une canalisation aval 6b vers la connexion d'entrée P de la servovalve 4.
- La servovalve 4 est représentée de façon conventionnelle sur la
figure 1 dans sa position fermée (bloc médian 4c dans le circuit) dans laquelle les quatre connexions A, B, P et T sont obturées. - Le tiroir de la servovalve peut occuper au moins deux positions actives extrêmes différentes :
- une première (bloc de gauche 4a dans le circuit) dans laquelle la connexion d'entrée P est reliée à la connexion de sortie A tandis que l'autre sortie B est reliée à la bâche 5 via la connexion T,
- une seconde (bloc de droite 4b dans le circuit) dans laquelle la connexion d'entrée P est reliée à la connexion de sortie B tandis que l'autre sortie A est reliée à la bâche 5 via la connexion T.
- Les déplacements du tiroir de la servovalve sont commandés de façon classique par un moteur couple 4d intégré à la servovalve, moteur couple qui est piloté par une unité de commande électronique 7.
- Les positions extrêmes 4a,4b correspondent aux débits maximaux de fluide fournis par la servovalve. Le tiroir peut d'une façon classique occuper des positions intermédiaires entre la position fermée et l'une ou l'autre des deux positions extrêmes. Ces positions intermédiaires correspondent à des débits de fluide différents transmis selon l'une ou l'autre des voies de commande.
- Les connexions de sortie A et B de la servovalve 4 sont reliées par des canalisations 8a et 8b aux chambres 2a et 2b du vérin 2 par l'intermédiaire de deux clapets antiretour pilotés 9a, 9b.
- Ces clapets sont représentés ici sous la forme d'un seul bloc hydraulique 9 comportant quatre sorties C, D, E et F. Chaque clapet 9a,9b comprend une bille appliquée sur un siège par la pression qui règne du côté de l'actionneur 2. La bille peut être écartée du siège par une pression de commande.
- Le clapet 9a est interposé entre les sorties C et E et il relie la chambre 2a de l'actionneur et la connexion A de la servovalve 4. Le clapet 9b est interposé entre les sorties D et F et il relie la chambre 2b de l'actionneur et la connexion B de la servovalve 4. Des liaisons hydrauliques 9c et 9d (représentées en pointillés) assurent la commande des clapets 9b et 9a respectivement.
- Ainsi une arrivée de pression en D s'écoule naturellement vers F au travers du clapet 9b et soulève également la bille du clapet 9a autorisant ainsi un passage de fluide de E vers C. Inversement une arrivée de pression en C s'écoule vers E et autorise un passage de fluide de F vers D.
- Les clapets 9a et 9b permettent le maintien en position du vérin 2 lorsqu'il est commandé en boucle ouverte ou en boucle fermée.
- Conformément à l'invention on dispose au moins un gicleur calibré reliant une des connexions de sortie A ou B de la servovalve 4 et la bâche hydraulique 5.
- Dans le mode de réalisation représenté à la
figure 1 on prévoit deux gicleurs 10a et 10b. - Un premier gicleur 10a est relié par une canalisation 11a à la canalisation 8a et il dérive vers la bâche 5 une partie du fluide circulant dans celle ci.
- Un deuxième gicleur 10b est relié par une canalisation 11b à la canalisation 8b et il dérive vers la bâche 5 une partie du fluide circulant dans celle ci.
- Les gicleurs seront constitués par des ajutages de calibres bien définis. Les calibres seront choisis de façon à assurer une baisse de pression dans la canalisation 8a ou 8b qui est inactive sans pour autant diminuer le débit dans la canalisation 8b ou 8a qui commande le mouvement. On choisira par exemple des sections de fuite pour les gicleurs qui permettront d'assurer un débit de fuite compris entre 4% et 7% du débit de fluide fourni par la pompe 3.
- Les gicleurs 10a et 10b ne perturbent donc pas le fonctionnement normal de la servovalve 4 car ils n'occasionnent pas de perte de débit notable dans une canalisation alimentée par la pompe 3.
- Néanmoins lorsque la servovalve 4 se trouve dans sa position fermée représentée à la
figure 1 , les gicleurs assurent un abaissement de la pression de fluide dans les canalisations 8a et 8b, en amont de la soupape 9. - Cet abaissement de pression permet de stabiliser les clapets antiretour 9a et 9b. En effet, le maintien de la pression dans les chambres de l'actionneur est assuré par les billes qui sont appliquées sur leur siège par la pression côté vérin. Ces billes voient de l'autre côté de leur siège la pression des canalisations 8a ou 8b.
- Grâce aux gicleurs 10a et 10b, la pression dans les canalisations 8a et 8b au niveau des entrées C et D est inférieure à celle qui se trouve respectivement aux entrées E et F. Les billes restent donc appliquées sur leurs sièges et on évite tout rebond qui conduirait à un à-coup de positionnement du vérin.
- Le pointage est donc obtenu avec précision lors d'un asservissement de positionnement du vérin en boucle fermée et la position est maintenue sans dérive lors d'un asservissement en boucle ouverte.
- On prévoira au moins un gicleur raccordé sur la canalisation opposée au mouvement que l'on souhaite accélérer. On prévoira de préférence deux gicleurs, un raccordé sur chaque canalisation.
- Concrètement il est possible de mettre en oeuvre l'invention avec un montage des canalisations 11a et 11b qui seraient raccordées directement en n'importe quel point des canalisations 8a et 8b.
- Selon un mode de réalisation préféré de l'invention on la mettra en oeuvre en prévoyant une plaque interface particulière 13 solidaire de la servovalve 4.
- La
figure 2 montre un schéma hydraulique simplifié de la plaque interface 13 et lesfigures 3a ,3b et3c montrent un mode de réalisation particulier de cette plaque interface. - Une servovalve 4 est concrètement réalisée sous la forme d'un composant comportant une embase parallélépipédique 12 qui porte sur une même face supérieure 12a les ouvertures (ou connexions) d'entrées et sorties A, B, T et P.
- La plaque interface 13 est donc elle aussi réalisée sous la forme d'un bloc parallélépipédique dont une face inférieure 13a est destinée à être appliquée sur la face 12a de la servovalve. Cette face comporte quatre ouvertures Ta, Aa, Ba et Pa destinées à se trouver en regard respectivement des ouvertures T, A, B et P de la servovalve 4. D'une façon classique et non représentée, chaque ouverture (Ta,Aa,Ba,Pa) de la plaque interface 13 comporte un lamage qui permet de loger un joint torique. Ce joint sera appliqué lors du montage contre la face 12a de la servovalve et assurera l'étanchéité.
- Une face supérieure 13b de la plaque 13 porte quatre ouvertures Tb, Ab, Bb et Pb sur lesquelles seront raccordées les différentes canalisations du circuit hydraulique. Les canalisations 8a et 8b qui conduisent au vérin sont fixées aux ouvertures Ab et Bb, la canalisation 6b qui vient de la pompe 3 est fixée à l'ouverture Pb et la canalisation 18 qui retourne à la bâche hydraulique 5 est fixée à l'ouverture Tb. Les fixations se font à l'aide de raccords hydrauliques appropriés.
- On pourra également appliquer la face 13b contre un bloc hydraulique (non représenté) qui portera des trous correspondant aux ouvertures Tb, Ab, Bb et Pb. Ces dernières ouvertures porteront alors aussi des lamages (non représentés) permettant de loger des joints toriques qui assureront l'étanchéité du raccordement avec le bloc. Le bloc sera relié par des canalisations appropriées au vérin, à la pompe et à la bâche.
- Les différentes ouvertures de la face inférieure 13a sont reliées aux ouvertures de la face supérieure 13b par des perçages usinés dans le matériau de la plaque 13.
- Ainsi l'ouverture Ta est reliée à l'ouverture Tb par le perçage 14, l'ouverture Aa est reliée à l'ouverture Ab par le perçage 15, l'ouverture Ba est reliée à l'ouverture Bb par le perçage 16 et l'ouverture Pa est reliée à l'ouverture Pb par le perçage 17.
- A l'intérieur de la plaque, un premier circuit de fuite hydraulique contrôlée 19a est formé par un canal sur lequel est disposé le gicleur 10a, et qui relie le perçage 15 et le perçage 14. La plaque renferme par ailleurs un deuxième circuit de fuite 19b formé par un autre canal sur lequel est disposé le gicleur 10b. Ce deuxième circuit de fuite 19b relie le perçage 16 et le perçage 14.
- Ainsi la plaque 13 permet de convertir d'une façon extrêmement simple la servovalve 4 pour lui adjoindre les gicleurs proposés par l'invention. Le circuit hydraulique peut donc aisément être modifié sans qu'il soit nécessaire de prévoir des canalisations supplémentaires.
- Comme cela est plus particulièrement visible aux
figures 3a ,3b et3c , les circuits de fuite 19a et 19b sont réalisés sous la forme de trous orthogonaux. Une telle disposition permet de faciliter la fabrication de la plaque interface 13. - Afin d'éviter toute interférence, les trous sont réalisés dans deux plans parallèles.
- Ainsi le plan AA (
figure 3a ) comprend deux trous orthogonaux 19a1 et 19a2 qui forment le premier circuit de fuite 19a. Le trou 19a2 renferme le premier gicleur 10a qui est réalisé sous la forme d'une vis dotée d'un orifice axial calibré. - Le plan BB (
figure 3b ) comprend quatre trous 19b1, 19b2, 19b3 et 19b4 qui sont orthogonaux deux à deux et forment ainsi un rectangle. Ces quatre trous constituent le deuxième circuit de fuite 19b. Le trou 19b1 renferme le deuxième gicleur 10b qui est lui aussi réalisé sous la forme d'une vis dotée d'un orifice axial calibré. - Tous les différents trous sont obturés de façon étanche par des bouchons filetés 20.
- On voit qu'il est aisé de modifier les caractéristiques de fuite du dispositif selon l'invention sans démontages complexes. Il suffit de dévisser les gicleurs 10a et 10b et de les remplacer par des gicleurs ayant des diamètres de fuite différents. Les diamètres de fuite des gicleurs seront choisis en fonction des caractéristiques de l'actionneur, de la charge et de la pression du circuit de l'asservissement en position.
- Des perçages 21 traversant la plaque interface 13 de part en part sont prévus pour permettre la fixation de la plaque sur la servovalve 4 par des vis (non représentées).
- A titre de variante, il est bien entendu possible de ne prévoir qu'un seul gicleur reliant une des voies d'alimentation du vérin à la bâche. Dans ce cas on remplacera l'autre gicleur par une vis non percée.
- Cette variante permet d'accélérer d'une façon préférentielle un des mouvements du vérin.
Claims (5)
- Dispositif de commande (1) en position d'un actionneur hydraulique (2), dispositif comprenant un circuit hydraulique comprenant une pompe (3) alimentant à partir d'une bâche ou réserve hydraulique (5) les deux chambres (2a, 2b) de l'actionneur par l'intermédiaire d'une servovalve (4), chaque voie de sortie de la servovalve étant reliée à une chambre de l'actionneur par l'intermédiaire d'un clapet antiretour (9a, 9b), au moins une des voies de sortie (8a, 8b) de la servovalve (4) qui est raccordée à une chambre (2a, 2b) de l'actionneur étant également reliée à la bâche hydraulique (5) par un gicleur calibré (10a, 10b) en amont du clapet antiretour (9a, 9b), caractérisée en ce que le dispositif comporte en outre une plaque interface (13) de servovalve comportant au moins quatre perçages transversaux (14, 15, 16, 17) coopérant avec les quatre ouvertures ou connexions hydrauliques (A, B, P, T) de la servovalve, c'est-à-dire une alimentation en fluide sous pression à partir d'une pompe (3), une sortie vers une bâche de réserve (5), une première voie de commande (8a) d'une première chambre (2a) de l'actionneur et une seconde voie de commande (8b) d'une seconde chambre (2b) de l'actionneur, ladite plaque comportant au moins un circuit de fuite (19a, 19b) reliant une des voies de commande à la sortie bâche (5), circuit dans lequel est disposé ledit gicleur calibré (10a, 10b).
- Dispositif de commande (1) selon la revendication 1, caractérisée en ce que la plaque comporte deux circuits de fuite (19a, 19b) comprenant un gicleur calibré (10a, 10b), chaque circuit reliant une des voies de commande à la sortie bâche (5).
- Dispositif de commande (1) selon une des revendications 1 ou 2, caractérisée en ce que le ou les circuits de fuite sont réalisés sous la forme de trous (19al, 19a2, 19b1, 19b2, 19b3, 19b4) perpendiculaires les uns aux autres et perpendiculaires aux perçages transversaux (14, 15, 16) correspondants aux différentes voies.
- Dispositif de commande (1) selon la revendication 3, caractérisée en ce que le débouché de chaque trou à l'extérieur de la plaque est obturé par un bouchon (20).
- Dispositif de commande (1) selon une des revendications précédentes, caractérisée en ce que le ou les gicleurs (10a, 10b sont réalisés sous la forme de vis comprenant un orifice axial calibré.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PL04292928T PL1548287T3 (pl) | 2003-12-23 | 2004-12-09 | Urządzenie do sterowania położeniowego hydraulicznym mechanizmem wykonawczym i płyta sprzęgająca dla serwozaworu wykorzystującego takie urządzenie |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0315427A FR2864178B1 (fr) | 2003-12-23 | 2003-12-23 | Dispositif de commande en position d'un actionneur hydraulique et plaque interface de servovalve mettant en oeuvre un tel dispositif |
| FR0315427 | 2003-12-23 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1548287A1 EP1548287A1 (fr) | 2005-06-29 |
| EP1548287B1 true EP1548287B1 (fr) | 2009-04-08 |
Family
ID=34531358
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP04292928A Active EP1548287B1 (fr) | 2003-12-23 | 2004-12-09 | Dispositif de commande en position d'un actionneur hydraulique et plaque interface de servovalve mettant en oeuvre un tel dispositif |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20050132876A1 (fr) |
| EP (1) | EP1548287B1 (fr) |
| AT (1) | ATE428056T1 (fr) |
| DE (1) | DE602004020440D1 (fr) |
| ES (1) | ES2325395T3 (fr) |
| FR (1) | FR2864178B1 (fr) |
| PL (1) | PL1548287T3 (fr) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100096576A1 (en) * | 2008-10-22 | 2010-04-22 | Mark Sommer | Valve bleed system |
| DE102010024923A1 (de) * | 2009-07-16 | 2011-01-27 | Luk Lamellen Und Kupplungsbau Beteiligungs Kg | Hydrauliksystem |
| US11274752B2 (en) * | 2020-01-08 | 2022-03-15 | Sun Hydraulics, Llc | Flow control valve with load-sense signal generation |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2672731A (en) * | 1951-08-01 | 1954-03-23 | Electrol Inc | Self-contained power actuator |
| US3184920A (en) * | 1963-06-12 | 1965-05-25 | Caterpillar Tractor Co | Leakage control for bulldozer pitch jack circuit |
| US3543647A (en) * | 1969-05-02 | 1970-12-01 | Deere & Co | Control valve means for a two-way hydraulic cylinder |
| US4051764A (en) * | 1975-06-05 | 1977-10-04 | Hikaru Murata | Hydraulic actuating system |
| FR2321416A1 (fr) * | 1975-08-21 | 1977-03-18 | Dba | Dispositif hydraulique d'assistance pour direction de vehicule automobile |
| FR2360801A1 (fr) * | 1976-04-30 | 1978-03-03 | Ppm Sa | Dispositif de controle de la mise en communication de deux enceintes et suspension de vehicule en faisant application |
| JPS5947506A (ja) * | 1982-09-09 | 1984-03-17 | Fuji Eng Kk | 複合弁 |
| US6516706B2 (en) * | 1999-08-19 | 2003-02-11 | Delaware Capital Formation, Inc. | Actuator having internal valve structure |
-
2003
- 2003-12-23 FR FR0315427A patent/FR2864178B1/fr not_active Expired - Fee Related
-
2004
- 2004-07-23 US US10/896,931 patent/US20050132876A1/en not_active Abandoned
- 2004-12-09 PL PL04292928T patent/PL1548287T3/pl unknown
- 2004-12-09 EP EP04292928A patent/EP1548287B1/fr active Active
- 2004-12-09 AT AT04292928T patent/ATE428056T1/de not_active IP Right Cessation
- 2004-12-09 DE DE602004020440T patent/DE602004020440D1/de active Active
- 2004-12-09 ES ES04292928T patent/ES2325395T3/es active Active
Also Published As
| Publication number | Publication date |
|---|---|
| ATE428056T1 (de) | 2009-04-15 |
| ES2325395T3 (es) | 2009-09-03 |
| PL1548287T3 (pl) | 2009-09-30 |
| US20050132876A1 (en) | 2005-06-23 |
| FR2864178A1 (fr) | 2005-06-24 |
| DE602004020440D1 (de) | 2009-05-20 |
| EP1548287A1 (fr) | 2005-06-29 |
| FR2864178B1 (fr) | 2006-02-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2006587B1 (fr) | Système de clapet d'étanchéité | |
| EP0915241A2 (fr) | Système d'arrêt de flux de carburant | |
| FR2463446A1 (fr) | Commande prioritaire de pression | |
| FR2480368A1 (fr) | Ensemble de valves de commande a sections multiples | |
| EP1548287B1 (fr) | Dispositif de commande en position d'un actionneur hydraulique et plaque interface de servovalve mettant en oeuvre un tel dispositif | |
| FR3027350B1 (fr) | Injecteur de carburant | |
| EP2356356B1 (fr) | Vanne pour la projection de produit de revetement et projecteur comportant une telle vanne | |
| FR3024505A1 (fr) | Servovalve a ensemble mobile double | |
| JP2008133933A (ja) | 連結用アダプタ | |
| BE1009338A3 (fr) | Vanne-pilote hydraulique. | |
| WO2009124957A1 (fr) | Verin hydraulique et structure d ' actionnement d' un bras manipulateur mettant en oeuvre au mois un tel verin | |
| FR3014488A1 (fr) | Vanne pour circuit carburant d'un moteur d'aeronef | |
| KR20160134900A (ko) | 유압 작동기의 유압 방향전환 블록 | |
| FR2634817A1 (fr) | Dispositif pour commander des moyens hydrauliques d'actionnement dans une fleche de forage de roche et une structure de fleche analogue | |
| FR2985284A1 (fr) | Dispositif pour la commande du calage des pales d'une helice | |
| FR2865013A1 (fr) | Robinet de garde de turbine avec by-pass integre | |
| FR2768185A1 (fr) | Installation d'injection de carburant pour un moteur a combustion interne | |
| EP3775645B1 (fr) | Vanne de regulation amelioree avec fonction de purge integree | |
| FR2511111A1 (fr) | Vanne de commande multiple | |
| FR2585415A1 (fr) | Unite electro-hydraulique de servocommande, notamment a tiroir de distribution de fluide de pression | |
| FR2921440A3 (fr) | Dispositif d'injection de carburant | |
| JP2004076838A (ja) | 油圧アクチュエータ装置 | |
| JP2001263515A (ja) | バルブ構造 | |
| FR3036765A1 (fr) | Etage de pilotage de servovalve, pouvant servir de premier etage dans une servovalve a deux etages. | |
| EP0216675A1 (fr) | Valves cartouches à insérer multi-fonctions coaxiales et application à la commande d'un vérin à double effet |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU MC NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR LV MK YU |
|
| 17P | Request for examination filed |
Effective date: 20051208 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU MC NL PL PT RO SE SI SK TR |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: NEXTER SYSTEMS |
|
| 17Q | First examination report despatched |
Effective date: 20060214 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU MC NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REF | Corresponds to: |
Ref document number: 602004020440 Country of ref document: DE Date of ref document: 20090520 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090408 |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2325395 Country of ref document: ES Kind code of ref document: T3 |
|
| REG | Reference to a national code |
Ref country code: PL Ref legal event code: T3 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090408 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090908 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090408 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090808 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090408 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090408 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090408 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090408 Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090408 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CZ Payment date: 20091125 Year of fee payment: 6 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SK Payment date: 20091130 Year of fee payment: 6 |
|
| 26N | No opposition filed |
Effective date: 20100111 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090708 |
|
| BERE | Be: lapsed |
Owner name: NEXTER SYSTEMS Effective date: 20091231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100701 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20091231 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090709 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20091231 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20091231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090408 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20091209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091009 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20101209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090408 |
|
| REG | Reference to a national code |
Ref country code: SK Ref legal event code: MM4A Ref document number: E 5548 Country of ref document: SK Effective date: 20101209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20090408 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20101209 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 12 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 13 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20231121 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20231121 Year of fee payment: 20 Ref country code: FR Payment date: 20231122 Year of fee payment: 20 Ref country code: FI Payment date: 20231121 Year of fee payment: 20 Ref country code: DE Payment date: 20231121 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20231127 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20240102 Year of fee payment: 20 |