EP1369886B1 - Commande mécanique à ressort pour disjoncteur haute ou moyenne tension, comprenant une roue dentée coopérant avec un pignon - Google Patents
Commande mécanique à ressort pour disjoncteur haute ou moyenne tension, comprenant une roue dentée coopérant avec un pignon Download PDFInfo
- Publication number
- EP1369886B1 EP1369886B1 EP03291308A EP03291308A EP1369886B1 EP 1369886 B1 EP1369886 B1 EP 1369886B1 EP 03291308 A EP03291308 A EP 03291308A EP 03291308 A EP03291308 A EP 03291308A EP 1369886 B1 EP1369886 B1 EP 1369886B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- segment
- teeth
- toothed wheel
- spring
- control mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images



Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H3/00—Mechanisms for operating contacts
- H01H3/22—Power arrangements internal to the switch for operating the driving mechanism
- H01H3/30—Power arrangements internal to the switch for operating the driving mechanism using spring motor
- H01H3/3005—Charging means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H3/00—Mechanisms for operating contacts
- H01H3/22—Power arrangements internal to the switch for operating the driving mechanism
- H01H3/30—Power arrangements internal to the switch for operating the driving mechanism using spring motor
- H01H2003/3063—Decoupling charging handle or motor at end of charging cycle or during charged condition
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19949—Teeth
Definitions
- the invention relates to a mechanical spring drive for a circuit breaker in a high or medium voltage network, comprising a toothed wheel rotated by a spring from a first angular position to a second angular position and a pinion cooperating with the toothed wheel for the moving from the second angular position towards the first angular position in order to tension said spring, said toothed wheel having a peripheral toothing consisting on the one hand of a primitive toothing of the wheel and on the other hand of a part of denture under the shape of a retractable toothed segment, said primitive toothing being at constant pitch.
- a circuit breaker in a high or medium voltage network is any switchgear intended for an electrical network whose operating voltage is greater than 1 kV.
- the invention can first be applied to a mechanical control in which the toothed wheel is secured to a single control shaft coupled to a moving contact of the circuit breaker so as to close the circuit breaker by the detent of the interlocking spring which is able to drive the wheel. It can also be applied to a control in which the toothed wheel is integral with a first shaft, said interlocking shaft, which is coupled to the movable contact via a second shaft, said main shaft, as is generally the case. case in the latest generation controls for high voltage circuit breakers.
- spring the engaging spring which is connected to the gear wheel and which is adapted to drive the latter.
- a pawl is generally arranged opposite a cam linked in motion to the wheel toothed so that the cam bears on this pawl when the toothed wheel reaches the first angular position.
- This pawl is generally articulated so that its release releases the gear and triggers the closure of the circuit breaker by expansion of the spring.
- Stopping the engine by cutting off its power supply is not suitable for immobilizing the gear wheel with sufficient accuracy because the inertia of the motor delays this stop.
- Such a control therefore generally comprises a mechanical device for uncoupling the motor from the toothed wheel when it reaches the first angular position. Without such a device, the forces generated by the inertia of the motor in the teeth and in the pawl would cause significant wear of the control which would lead quickly to its destruction.
- the document EP 0917168 comprises a number of constituent elements that can be used in a mechanical control according to the invention.
- the toothed wheel comprises a plurality of teeth slidable inwardly of the toothed wheel, these sliding teeth being located in an area of the toothed wheel corresponding to the position of the pinion when the toothed wheel is in the first angular position.
- Each sliding tooth is able to retract by sliding radially against a return spring of its own. More particularly, each sliding tooth has an asymmetrical profile with a tooth head forming an inclined plane, so that when they are engaged by the pinion, the sliding teeth retract under the effect of the pressure force they undergo. from the pinion, which has the effect of mechanically uncoupling the motor of the toothed wheel.
- These sliding teeth are spaced a distance much greater than the pitch of the toothing for the remainder of the toothed wheel, in order to facilitate the re-engagement of the pinion during the expansion of the spring.
- the retractable teeth have a specific profile including a tooth head in the form of inclined plane which further increases the cost of manufacture.
- the object of the invention is to overcome the disadvantages of the state of the art by proposing a system more reliable for a reduced manufacturing cost.
- the object of the invention is a spring-loaded mechanical control device for a high-voltage circuit breaker, comprising a toothed wheel driven in rotation by a spring from a first angular position to a second angular position and a pinion cooperating with the toothed wheel for the moving from the second angular position towards the first angular position in order to tension said spring, said toothed wheel having a peripheral toothing consisting on the one hand of a primitive toothing of the wheel and on the other hand of a part of denture under the shape of a retractable toothed segment, said primitive toothing being at constant pitch, characterized in that said retractable segment comprises at least four teeth spaced one by one at the same constant pitch as the pitch of said primitive toothing.
- the segment of retractable teeth thus comprises a conventional toothing that does not require any particular machining, which further reduces the manufacturing cost of the control according to the invention.
- the segment is articulated in the toothed wheel by a first end, being retained by a return spring tending to keep it out.
- This return spring may advantageously consist of an angled V-shaped blade.
- the articulation is located inside a circle of the same diameter as the base diameter of the toothing of the toothed wheel.
- the articulation of the segment comprises an axis which is positioned at a distance from the base diameter of between one and two times the distance separating the base diameter from the pitch diameter.
- the segment retracts into the thickness of the toothed wheel between two plates forming flanges of the toothed wheel.
- the toothed wheel has a small footprint, and the teeth can be made by cutting the plates.
- the system for resetting the engagement spring 4 of a mechanical control device comprises an engagement shaft 1, a large-diameter gear wheel 2 mounted on this engagement shaft, and a non-driving motor. shown represented coupled to the toothed wheel 2 by means of a pinion 3.
- the movable contact of the circuit breaker is coupled to the interlocking shaft by means in particular of a main shaft known per se and not shown.
- the switching spring 4 serves to drive the switching shaft 1 to cause the closing of the circuit breaker.
- the spring 4 has a first end connected to a first cam 5 which is mounted at the end of the engagement shaft 1 being integral with this shaft and a second end connected to the frame of the control. More particularly, the spring 4 has its first end connected to an anchoring point 5 'on the first cam via a cable 4' or a chain passing in a deflection pulley 4 ".
- the anchoring point 5 'on the first cam 5 is eccentric with respect to the engagement shaft 1, so that when the engagement shaft is in a first angular position shown on the figure 1 the spring 4 is stretched and exerts a force tending to drive the engagement shaft in the indirect direction IND in the figure. This first angular position is close to a top dead position corresponding to a maximum tension of the spring 4.
- the motor which drives the pinion 3, when electrically powered, serves to bring the engagement shaft 1 back to its first angular position by rotating it by approximately 180 ° in the indirect direction IND, so that the command is again armed in the position shown in the figure 1 .
- the motor is mechanically decoupled from the gear when it reaches the first angular position through the implementation of a segment of retractable teeth.
- the peripheral toothing of the toothed wheel 2 consists on the one hand of a primitive toothing of the wheel and on the other hand of a tooth part in the form of a retractable toothed segment 10.
- This segment is arranged to the periphery of the toothed wheel 2 in an area corresponding to the position of the pinion 3 when the toothed wheel is in the first angular position.
- This segment 10 may for example be slidably mounted relative to the toothed wheel 2 so as to be able to slide in a generally radial movement with respect to the locking shaft.
- the segment 10 retracts to uncouple the pinion 3. More particularly, when the segment 10 retracts, the teeth it carries near the locking shaft to disengage the pinion 3 and the toothed wheel 2.
- the retractable segment 10 comprises at least four teeth spaced one by one at the same constant pitch as the pitch of the primitive toothing.
- the segment 10 when the segment 10 is in an extended position, its teeth are located in the continuity of the original toothing of the toothed wheel 2 to allow meshing of the pinion 3.
- the teeth of the segment 10 are further normal teeth and identical to the teeth of the original teeth.
- a minimum number of four teeth is required for a segment 10 in a control according to the invention.
- a number of teeth between eight and twenty will be adopted in most of the mechanical control embodiments according to the invention.
- the teeth of the segment 10 can be made with a conventional machine tool for machining gear teeth, which significantly reduces the manufacturing cost of the control according to the invention while improving the safety of operation.
- the segment may for example retract under the effect of a mechanism managing its radial position depending on the angular position of the toothed wheel.
- a return spring 11 shown schematically figure 2 tends to keep the segment 10 in the extended position, so that this segment 10 retracts spontaneously as soon as the pinion 3 meshes it, which will be detailed below.
- the segment 10 has a first end fixed to the toothed wheel 2 by a hinge 12 and its other end resting on the return spring 11 which is integral with the gear wheel.
- the hinge 12 is formed by an axis fixed to the toothed wheel and around which the segment 10 can rotate.
- the return spring 11 is here a helical spring extending radially having one end bearing on the segment 10 and its other end bearing on the toothed wheel 2.
- the retractable segment 10 can be made of a plastic material such as a polymer so as to form, for example, a single piece made by molding and including two protuberances forming the axis of articulation 12.
- a spiral spring located at the axis of the hinge 12 having one end connected to the segment and its other end connected to the gear wheel is also conceivable without departing from the scope of the invention.
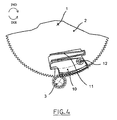
- a spring 11 whose straight portions of the V-blade are each approximately the same length as the retractable segment 10 and form between them an angle of between 10 ° and 20 ° may be quite suitable, as shown figure 4 .
- the segment 10 is thus adapted to retract by pivoting against the return spring 11. More particularly, when it is retracted the segment forms a recess in the periphery of the toothed wheel 2: the teeth of the first end move globally in the radial direction of the toothed wheel 2 towards the engagement shaft, while the teeth of the second end which are close to the joint move little, as visible figure 7 .
- the segment and the return spring may advantageously be mounted in the thickness of the toothed wheel to reduce its bulk so that the segment retracts into the thickness of the toothed wheel to reduce its bulk, as visible on the figure 3 which is a partial sectional view of the segment and the return spring in a plane containing the engagement shaft 1.
- the toothed wheel 2 here comprises three steel plates 2A, 2B and 2C resting on each other.
- the center plate 2B comprises a large recess at the retractable segment 10 and is sandwiched between the two side plates which form flanges of the toothed wheel and comprise smaller recesses in this area.
- the retractable segment is guided by the two side plates 2A and 2C between which it is free to slide radially.
- the axis of the hinge 12 which passes through the segment 10 has each of its ends fixed to a side plate 2A, 2C.
- the recess of the central plate 2B forms in particular a stop on which the second end of the segment 10 bears when it is out.
- each plate has a small thickness which allows the teeth to be cut by cutting each plate instead of making this toothing by machining to further reduce the manufacturing costs of the control according to the invention.
- the teeth which are provided with each of the plates on their periphery except the zone of the retractable segment constitute the toothing of the toothed wheel.
- the toothed wheel may also be made with a larger number of plates so as to form a thicker toothing while producing it by cutting instead of making it by machining.
- FIGS. 5 to 8 give a schematic representation of the operation of the resetting system of the switching spring 4 of the control corresponding to the resetting of the spring and then triggering a closing of the circuit breaker by the control. During this operation, the toothed wheel rotates in the indirect direction IND in the figures.
- the figure 5 represents a part of the toothed wheel 2 when it is driven in rotation in the indirect direction IND by the pinion 3 to reach its first angular position.
- the pinion 3 reaches the first end of the segment 10 being initially meshing in the toothing of this segment, which corresponds substantially to the position for which the first cam 5 comes to bear on the pawl 6.
- the pressing forces F 1 of the pinion 3 on the toothing of the segment 10 are carried by a substantially oblique axis A 1 which is positioned such that the hinge 12 is between this axis A 1 and the engagement shaft 1. More particularly, these pressing forces F 1 are oriented from right to left on the figure 6 , such that they tend to rotate the segment 10 in the indirect direction IND about the axis of the hinge 12 so that the segment retracts as soon as it is engaged by the pinion 3.
- the segment thus retracts naturally, which mechanically disengages the gear motor when it reaches the first angular position.
- the pinion 3 stops in any angular position: it can be engaged in the segment 10 which is then in the extended position; or else disengaged with the segment that is then retracted as in the figure 7 .
- the drive gear by the motor can be achieved through a clutch type system. Nevertheless, as explained in the following, the invention makes it possible to reduce these mechanical stresses so that a Direct drive of the pinion by the motor generally does not lead to premature wear of the pinion and / or retractable teeth.
- the pinion 3 and the toothed wheel 2 spontaneously disconnect when the wheel reaches the first angular position and spontaneously reconnect when the spring is released. 4.
- the hinge 12 of the segment 10 is located inside a circle of the same center as the wheel 2 and of the same diameter as the base diameter D B of the toothing of the wheel 2. in order to facilitate further reentry. More particularly, during the expansion of the spring 4, the pressing forces F 2 of the pinion 3 on the toothing of the segment 10 are carried by another axis A 2 also oblique. By positioning the hinge within the base diameter D B , this other axis A 2 is situated in such a way that the hinge 12 is situated between the engagement shaft and this other axis A 2 .
- the base diameter of the toothing corresponds to the diameter of a circle centered on the wheel 2 and tangential to the axis A 2 and to the axis A 1 .
- the axis of the hinge 12 of the segment 10 is substantially removed from the base diameter D B of the toothed wheel 2 so that the displacement of the teeth of the retractable segment 10 takes place in an oblique direction with respect to the radial direction of
- the further the axis of the hinge 12 is close to the base diameter D B the more the displacement of the teeth of the retractable segment 10 is radial; and the further this axis is away from the base diameter D B , the greater this displacement is carried out with a substantial tangential component along an axis tangential to the toothed wheel 2.
- the tangential component of the displacement of the teeth of the retractable segment 10 promotes an anticipated meshing of the pinion 3 of the engine, ie a meshing in a situation for which the segment 10 is not yet fully out while the toothed wheel 2 begins to drive the pinion 3 in rotation. Following the meshing spontaneously produces the output of the segment 10, as indicated above.
- the presser forces F 2 due to the meshing are thus reduced during the exit of the segment 10, compared to a system where the axis of the hinge 12 would be closer to the base diameter D B of the toothed wheel.
- the variation of these pressing forces is also less abrupt during this meshing start phase.
- the fact that the teeth of the retractable segment 10 can move slightly in a tangential direction also allows a relatively progressive mechanical uncoupling between the pinion 3 and the retractable segment 10 when the pinion rotates the toothed wheel 2 and that it reaches the first angular position as shown in the figure 7 .
- the positioning of the axis of the hinge 12 at a certain distance from the base diameter D B , as well as the arrangement of the teeth of the retractable segment 10 spaced apart from each other by the same constant pitch as on the toothed wheel 2, contribute to improving the life of a control according to the invention and also allows the use of a plastic material such as a polymer to achieve the retractable segment without risk of premature wear segment teeth.
- the control according to the invention may also include an electric motor supply switch for managing the motor power supply as a function of the angular position of the toothed wheel.
- the control also includes a second cam 7 integral with the engagement shaft and which cooperates with a control lever 8, as visible figure 1 .
- This control lever 8 is rotatably mounted at a first end and has its second end held in abutment on the contour of the second cam 7 by an elastic element 8 'which is here a helical spring.
- This control lever is linked in motion to an electrical switch (not shown) via three links 9A, 9B, 9C so as to control the power supply of the motor.
- the contour of the second cam 7 forms a spiral arc centered on the engagement shaft which closes on itself by a recess.
- the electrical switch When the second end of the control lever 8 is placed in the recess of the contour of the cam 7, ie as close as possible to the locking shaft 1 as visible on the figure 1 , the electrical switch is set in position to cut off the power supply of the motor which corresponds to the end of the resetting of the spring 4.
- the electrical switch When the second end of the control lever 8 is placed on an area of the spiral arc close to the switch shaft, the electrical switch is set in position to control the power supply of the motor so as to automatically reset the spring after it has been released. The switch is thus actuated to cut off the power supply to the motor when the gearwheel reaches the first angular position while the retractable segment ensures the instantaneous disconnection of the motor.
- This switch controls the power supply to the motor shortly before or shortly after the spring has fully relaxed to tighten the spring, that is when the shaft reaches its second angular position.
- the spring-loaded mechanical control according to the invention is thus re-armed autonomously after each relaxation of the spring 4.
Landscapes
- One-Way And Automatic Clutches, And Combinations Of Different Clutches (AREA)
- Mechanisms For Operating Contacts (AREA)
- Gears, Cams (AREA)
- Transmission Devices (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Driving Mechanisms And Operating Circuits Of Arc-Extinguishing High-Tension Switches (AREA)
- Springs (AREA)
- Gear Transmission (AREA)
- Chairs For Special Purposes, Such As Reclining Chairs (AREA)
Description
- L'invention concerne une commande mécanique à ressort pour disjoncteur dans un réseau haute ou moyenne tension, comprenant une roue dentée entraînée en rotation par un ressort d'une première position angulaire vers une seconde position angulaire et un pignon coopérant avec la roue dentée pour la déplacer depuis la seconde position angulaire vers la première position angulaire afin de tendre ledit ressort, ladite roue dentée ayant une denture périphérique constituée d'une part d'une denture primitive solidaire de la roue et d'autre part d'une partie de denture sous la forme d'un segment denté rétractable, ladite denture primitive étant à pas constant.
- On entend par disjoncteur dans un réseau haute ou moyenne tension tout appareillage de coupure destiné à un réseau électrique dont la tension d'exploitation est supérieure à 1 kV.
- L'invention peut tout d'abord être appliquée à une commande mécanique dans laquelle la roue dentée est solidaire d'un arbre de commande unique accouplé à un contact mobile du disjoncteur de manière à fermer le disjoncteur par la détente du ressort d'enclenchement qui est apte à entraîner la roue. Elle peut aussi être appliquée à une commande dans laquelle la roue dentée est solidaire d'un premier arbre dit arbre d'enclenchement qui est accouplé au contact mobile par l'intermédiaire d'un second arbre dit arbre principal, comme c'est généralement le cas dans les commandes de dernière génération pour disjoncteurs haute tension.
- Il convient de noter qu'indépendamment du fait que la commande soit à arbre unique ou non, la liaison entre le ou les arbres et un contact mobile du disjoncteur n'est pas réversible, c'est à dire que le ressort d'enclenchement peut être retendu par rotation du pignon après la fermeture du disjoncteur sans provoquer l'ouverture de ce dernier. Ce pignon est entraîné par un moteur électrique pour réarmer la commande, et la roue dentée tourne dans le même sens lorsque le ressort d'enclenchement se détend et lorsqu'il est retendu par le moteur.
- Dans ce qui suit, on désignera le plus souvent par "ressort" le ressort d'enclenchement qui est relié à la roue dentée et qui est apte à entraîner cette dernière.
- En fin de réarmement du ressort, la rotation de la roue dentée est arrêtée lorsque cette roue dentée atteint la première position angulaire qui correspond sensiblement à la tension maximale du ressort. Un cliquet est généralement disposé en regard d'une came liée en mouvement à la roue dentée de sorte que la came vient en appui sur ce cliquet lorsque la roue dentée atteint la première position angulaire. Ce cliquet est généralement articulé pour que son dégagement libère la roue dentée et déclenche la fermeture du disjoncteur par détente du ressort.
- L'arrêt du moteur par coupure de son alimentation électrique n'est pas adapté pour immobiliser la roue dentée avec une précision suffisante car l'inertie du moteur retarde cet arrêt. Une telle commande comprend donc généralement un dispositif mécanique pour désaccoupler le moteur de la roue dentée lorsqu'elle atteint la première position angulaire. Sans un tel dispositif, les efforts générés par l'inertie du moteur dans les dentures et dans le cliquet provoqueraient une usure importante de la commande qui conduirait rapidement à sa destruction.
- Le document de
brevet EP 0917168 comporte un bon nombre d'éléments constitutifs qui peuvent être utilisés dans une commande mécanique selon l'invention. La roue dentée comprend une pluralité de dents pouvant coulisser vers l'intérieur de la roue dentée, ces dents coulissantes étant situées dans une zone de la roue dentée correspondant à la position du pignon lorsque la roue dentée est dans la première position angulaire. Chaque dent coulissante est apte à se rétracter en glissant radialement à l'encontre d'un ressort de rappel qui lui est propre. Plus particulièrement, chaque dent coulissante a un profil asymétrique avec une tête de dent formant un plan incliné, de sorte que lorsqu'elles sont engrenées par le pignon, les dents coulissantes se rétractent sous l'effet de l'effort presseur qu'elles subissent de la part du pignon, ce qui a pour effet de désaccoupler mécaniquement le moteur de la roue dentée. Ces dents coulissantes sont espacées d'une distance nettement supérieure au pas de la denture pour le reste de la roue dentée, en vue de faciliter le réengrènement du pignon lors de la détente du ressort. - Un tel agencement nécessite un système de coulissement pour chaque dent, ce qui représente un surcoût d'usinage et de fabrication significatifs. D'autre part les dents rétractables ont un profil spécifique incluant une tête de dent en forme de plan incliné ce qui accroît encore le coût de fabrication.
- Il est connu du document de
brevet JP 01154418 - Cette réalisation n'est cependant pas satisfaisante, comme il est expliqué en préambule du document de brevet
US 5723836 . Il est précisé dans ce document que la phase de désaccouplement entre le pignon et la roue dentée implique une oscillation du segment rétractable telle que les collisions entre les dents du pignon et la dent à l'extrémité oscillante du segment risquent de conduire à une détérioration de surface d'au moins une dent. En conséquence, un examen rigoureux de la surface des dents est nécessaire pour limiter le risque d'une telle détérioration, ce qui conduit à un surcoût pour la fabrication de la commande. - Tout en conservant le principe d'une commande de disjoncteur dont la denture de la roue dentée comprend des dents disposées sur un segment rétractable, le but de l'invention est de remédier aux inconvénients de l'état de la technique en proposant un système plus fiable pour un coût de fabrication réduit.
- A cet effet, l'invention a pour objet commande mécanique à ressort pour disjoncteur haute tension, comprenant une roue dentée entraînée en rotation par un ressort d'une première position angulaire vers une seconde position angulaire et un pignon coopérant avec la roue dentée pour la déplacer depuis la seconde position angulaire vers la première position angulaire afin de tendre ledit ressort, ladite roue dentée ayant une denture périphérique constituée d'une part d'une denture primitive solidaire de la roue et d'autre part d'une partie de denture sous la forme d'un segment denté rétractable, ladite denture primitive étant à pas constant, caractérisée en ce que ledit segment rétractable comprend au moins quatre dents espacées une à une du même pas constant que le pas de ladite denture primitive.
- Le segment de dents rétractables comprend ainsi une denture classique ne nécessitant pas d'usinage particulier, ce qui réduit encore le coût de fabrication de la commande selon l'invention.
- Selon un mode de réalisation préféré de l'invention le segment est articulé dans la roue dentée par une première extrémité, en étant retenu par un ressort de rappel tendant à le maintenir sorti. Ce ressort de rappel peut avantageusement être constitué d'une lame en V coudée. Le segment se rétracte naturellement lorsqu'il est engrené par le pignon au niveau de la première extrémité, de sorte qu'il n'est pas nécessaire de prévoir de mécanisme de commande de la position du segment rétractable ce qui simplifie la commande selon l'invention.
- Selon un autre mode de réalisation particulier de l'invention, l'articulation est située à l'intérieur d'un cercle de même diamètre que le diamètre de base de la denture de la roue dentée. Avec cet agencement, le pignon est désaccouplé de la roue en fin de réarmement du ressort d'enclenchement, mais il se réaccouple spontanément avec la roue dentée sur détente du ressort de rappel, y compris si le segment est resté dans une position rétractée après arrêt complet du moteur.
- Avantageusement l'articulation du segment comprend un axe qui est positionné à une distance du diamètre de base comprise entre une et deux fois la distance séparant le diamètre de base du diamètre primitif. Cette disposition, qui autorise un mouvement sensiblement tangentiel en plus du mouvement globalement radial des dents du segment rétractable, permet un engrènement anticipé du pignon dans les dents du segment rétractable pour réduire encore les efforts presseurs entre les dents du pignon et du segment et améliorer ainsi la durée de vie de la commande selon l'invention.
- Selon encore un autre mode de réalisation particulier de l'invention, le segment se rétracte dans l'épaisseur de la roue dentée entre deux plaques formant des flasques de la roue dentée. Ainsi, la roue dentée a un encombrement restreint, et la denture peut être réalisée par découpe des plaques.
- L'invention sera maintenant décrite plus en détail, et en référence aux dessins annexés qui en illustrent une forme de réalisation à titre d'exemple non limitatif.
- La
figure 1 est une représentation schématique d'un système de réarmement du ressort dans une commande mécanique selon l'invention ; - La
figure 2 est une vue de la roue dentée du système de réarmement représenté sur lafigure 1 ; - La
figure 3 est une vue en coupe de la roue dentée représentée sur lafigure 2 ; - La
figure 4 est une vue en coupe d'une variante de la roue dentée du système de réarmement représenté sur lafigure 1 ; - La
figure 5 est une première vue partielle de la roue dentée selon l'invention ; - La
figure 6 est une seconde vue partielle de la roue dentée selon l'invention ; - La
figure 7 est une troisième vue partielle de la roue dentée selon l'invention ; - La
figure 8 sont des vues partielles du système de réarmement représenté sur lafigure 1 , correspondant à différentes positions angulaires de la roue. -
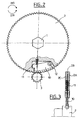
Figure 1 , le système de réarmement du ressort d'enclenchement 4 d'une commande mécanique selon l'invention comporte un arbre d'enclenchement 1, une roue dentée de grand diamètre 2 montée sur cet arbre d'enclenchement, et un moteur d'entraînement non représenté accouplé à la roue dentée 2 par l'intermédiaire d'un pignon 3. Le contact mobile du disjoncteur est accouplé à l'arbre d'enclenchement par l'intermédiaire notamment d'un arbre principal connu en soi et non représenté. - Le ressort d'enclenchement 4 sert à l'entraînement de l'arbre d'enclenchement 1 pour provoquer la fermeture du disjoncteur. Le ressort 4 a une première extrémité reliée à une première came 5 qui est montée en bout de l'arbre d'enclenchement 1 en étant solidaire de cet arbre et une seconde extrémité liée au bâti de la commande. Plus particulièrement, le ressort 4 a sa première extrémité liée à un point d'ancrage 5' sur la première came par l'intermédiaire d'un câble 4' ou d'une chaîne passant dans une poulie de renvoi d'angle 4". Le point d'ancrage 5' sur la première came 5 est excentré par rapport à l'arbre d'enclenchement 1, de sorte que lorsque l'arbre d'enclenchement est dans une première position angulaire montrée sur la
figure 1 , le ressort 4 est tendu et exerce un effort tendant à entraîner l'arbre d'enclenchement dans le sens indirect IND sur la figure. Cette première position angulaire est proche d'une position de point mort haut correspondant à une tension maximale du ressort 4. - La rotation de l'arbre d'enclenchement sous l'action du ressort 4 est bloquée par un cliquet de déclenchement 6 engagé contre la première came 5. Un déplacement angulaire du cliquet 6 permet de libérer la première came 5 ce qui autorise une rotation de l'arbre d'enclenchement 1. Dans l'exemple des figures, le cliquet est déplacé par un système 6' à électro-aimants connu en soi. Sous l'effet de la détente du ressort 4, l'arbre d'enclenchement 1 est entraîné en rotation dans le sens indirect IND sur 180° environ, depuis sa première position angulaire vers une seconde position angulaire correspondant sensiblement à un point mort bas.
- Le moteur qui entraîne le pignon 3, lorsqu'il est alimenté électriquement, sert à ramener l'arbre d'enclenchement 1 dans sa première position angulaire en le faisant tourner d'environ 180° toujours dans le sens indirect IND, de sorte que la commande est à nouveau armée dans la position montrée dans la
figure 1 . - De façon connue, le moteur est mécaniquement découplé de la roue dentée lorsque celle-ci atteint la première position angulaire grâce à la mise en oeuvre d'un segment de dents rétractables. La denture périphérique de la roue dentée 2 est constituée d'une part d'une denture primitive solidaire de la roue et d'autre part d'une partie de denture sous la forme d'un segment denté rétractable 10. Ce segment est disposé à la périphérie de la roue dentée 2 dans une zone correspondant à la position du pignon 3 lorsque la roue dentée est dans la première position angulaire. Ce segment 10 peut par exemple être monté coulissant par rapport à la roue dentée 2 de manière à être capable de coulisser dans un mouvement globalement radial par rapport à l'arbre d'enclenchement.
- Lorsque la roue dentée 2 atteint la première position angulaire, le segment 10 se rétracte pour désaccoupler le pignon 3. Plus particulièrement, lorsque le segment 10 se rétracte, les dents qu'il porte se rapprochent de l'arbre d'enclenchement pour désengrener le pignon 3 et la roue dentée 2.
- Selon l'invention, le segment rétractable 10 comprend au moins quatre dents espacées une à une du même pas constant que le pas de la denture primitive. Ainsi, lorsque le segment 10 est dans une position sortie, ses dents sont situées dans la continuité de la denture primitive de la roue dentée 2 pour autoriser un engrènement du pignon 3.
- Les dents du segment 10 sont en outre des dents normales et identiques aux dents de la denture primitive. Un nombre minimal de quatre dents s'avère nécessaire pour un segment 10 dans une commande selon l'invention. De préférence, un nombre de dents compris entre huit et vingt sera adopté dans la plupart des réalisations de commande mécanique selon l'invention.
- Ainsi, la denture du segment 10 pourra être réalisée avec une machine outil classique destinée à l'usinage de dentures d'engrenages, ce qui réduit significativement le coût de fabrication de la commande selon l'invention tout en permettant d'améliorer la sûreté de fonctionnement.
- Le segment pourra par exemple se rétracter sous l'effet d'un mécanisme gérant sa position radiale en fonction de la position angulaire de la roue dentée. Avantageusement, de façon classique, un ressort de rappel 11 représenté schématiquement
figure 2 tend à maintenir le segment 10 en position sortie, de telle sorte que ce segment 10 se rétracte spontanément dès que le pignon 3 l'engrène, ce qui sera détaillé plus bas. - Dans un mode de réalisation préféré, le segment 10 a une première extrémité fixée à la roue dentée 2 par une articulation 12 et son autre extrémité en appui sur le ressort de rappel 11 qui est solidaire de la roue dentée. Dans l'exemple de réalisation représenté sur les figures, l'articulation 12 est réalisée par un axe fixé à la roue dentée et autour duquel le segment 10 peut pivoter. Comme visible
figure 2 , le ressort de rappel 11 est ici un ressort hélicoïdal s'étendant radialement en ayant une extrémité en appui sur le segment 10 et son autre extrémité en appui sur la roue dentée 2. Avantageusement, le segment rétractable 10 peut être réalisé en un matériau plastique tel qu'un polymère de manière à former par exemple une pièce unique réalisée par moulage et incluant deux protubérances formant l'axe de l'articulation 12. - Un ressort en spirale situé au niveau de l'axe de l'articulation 12 en ayant une extrémité reliée au segment et son autre extrémité relié à la roue dentée est également envisageable sans sortir du cadre de l'invention. Avantageusement, il est possible de prolonger suffisamment vers la partie centrale de la roue dentée 2 l'évidement qui est prévu pour loger le segment rétractable 10, afin de pouvoir loger entre la roue 2 et le bord intérieur de ce segment 10 un ressort constitué d'une lame en V coudée avec un angle relativement fermé. Par exemple, un tel ressort 11 dont les parties droites de la lame en V ont chacune approximativement la même longueur que le segment rétractable 10 et forment entre elles un angle compris entre 10° et 20° pourra tout à fait convenir, comme représenté
figure 4 . - Le segment 10 est ainsi apte à se rétracter en pivotant à l'encontre du ressort de rappel 11. Plus particulièrement, lorsqu'il est rétracté le segment forme un décrochement dans la périphérie de la roue dentée 2: les dents de la première extrémité se déplacent globalement dans la direction radiale de la roue dentée 2 vers l'arbre d'enclenchement, alors que les dents de la seconde extrémité qui sont proches de l'articulation se déplacent peu, comme visible
figure 7 . - Le segment et le ressort de rappel pourront avantageusement être montés dans l'épaisseur de la roue dentée pour en réduire l'encombrement de sorte que le segment se rétracte dans l'épaisseur de la roue dentée pour en réduire l'encombrement, comme visible sur la
figure 3 qui est une vue en coupe partielle du segment et du ressort de rappel dans un plan contenant l'arbre d'enclenchement 1. - Plus particulièrement, la roue dentée 2 comprend ici trois plaques en acier 2A, 2B et 2C en appui les unes sur les autres. La plaque centrale 2B comprend un évidement de grande taille au niveau du segment rétractable 10 et elle est enserrée entre les deux plaques latérales qui forment des flasques de la roue dentée et comprennent des évidements de plus petite taille dans cette zone. Ainsi, le segment rétractable est guidé par les deux plaques latérales 2A et 2C entre lesquelles il est libre de coulisser radialement. L'axe de l'articulation 12 qui traverse le segment 10 a chacune de ses extrémités fixée à une plaque latérale 2A, 2C. L'évidement de la plaque centrale 2B forme notamment une buttée sur laquelle la seconde extrémité du segment 10 est en appui lorsqu'il est sorti.
- Avec cet agencement, chaque plaque présente une faible épaisseur ce qui permet de réaliser la denture par découpe de chaque plaque au lieu de réaliser cette denture par usinage afin de réduire encore les coûts de fabrication de la commande selon l'invention. Ainsi, les dents dont sont munies chacune des plaques sur leur périphérie hormis la zone du segment rétractable constituent la denture de la roue dentée. La roue dentée pourra également être réalisée avec une nombre plus important de plaques de manière à former une denture plus épaisse tout en réalisant celle-ci par découpe au lieu de la réaliser par usinage.
- Les
figures 5 à 8 donnent une représentation schématique du fonctionnement du système de réarmement du ressort d'enclenchement 4 de la commande correspondant au réarmement du ressort puis au déclenchement d'une fermeture du disjoncteur par la commande. Durant ce fonctionnement la roue dentée tourne dans le sens indirect IND sur les figures. - La
figure 5 représente une partie de la roue dentée 2 lorsqu'elle est entraînée en rotation dans le sens indirect IND par le pignon 3 pour atteindre sa première position angulaire. -
Figure 6 , le pignon 3 atteint la première extrémité du segment 10 en étant dans un premier temps engrené dans la denture de ce segment, ce qui correspond sensiblement à la position pour laquelle la première came 5 arrive en appui sur le cliquet 6. Comme visiblefigure 6 , les efforts presseurs F1 du pignon 3 sur la denture du segment 10 sont portés par un axe A1 sensiblement oblique qui est positionné de telle sorte que l'articulation 12 est entre cet axe A1 et l'arbre d'enclenchement 1. Plus particulièrement, ces efforts presseurs F1 sont orientés de droite à gauche sur lafigure 6 , de telle manière qu'ils tendent à faire tourner le segment 10 dans le sens indirect IND autour de l'axe de l'articulation 12 pour que le segment se rétracte dès qu'il est engrené par le pignon 3. - Comme représenté
figure 7 , le segment se rétracte ainsi naturellement, ce qui désaccouple mécaniquement le moteur de la roue dentée lorsque celle-ci atteint la première position angulaire. Après la fin de la rotation du moteur sous l'effet de sa propre inertie, le pignon 3 s'immobilise dans une position angulaire quelconque : il peut être engrené dans le segment 10 qui est alors en position sortie ; ou bien désengené avec le segment qui est alors rétracté comme dans lafigure 7 . - Durant la détente du ressort 4, la roue dentée 2 tourne dans le sens indirect IND en entraînant le pignon 3 en rotation quel que soit l'un des cas de figures suivants qui se présente :
- si le pignon était resté engrené avec le segment 10, il est directement entraîné en rotation ;
- si le segment était resté rétracté, le ressort de rappel maintient les dents du segment 10 en appui sur la denture du pignon 3 de sorte qu'elles se réengrènent naturellement après une faible rotation de la roue dentée qui met les deux dentures en phase l'une avec l'autre, comme représenté
figure 8 . - Pour réduire les contraintes mécaniques sur la denture du pignon, l'entraînement du pignon par le moteur peut être réalisé par l'intermédiaire d'un système de type embrayage. Néanmoins, comme expliqué dans ce qui suit, l'invention permet de réduire ces contraintes mécaniques de sorte qu'un entraînement direct du pignon par le moteur n'entraîne généralement pas une usure prématurée des dents du pignon et/ou du segment rétractable.
- Ainsi, dans un système de réarmement du ressort d'enclenchement d'une commande selon l'invention, le pignon 3 et la roue dentée 2 se désaccouplent spontanément lorsque la roue atteint la première position angulaire et se réaccouplent spontanément lors de la détente du ressort 4.
- Comme connu de l'homme du métier, on entend par diamètre de base de la denture le diamètre DB qui est donné par la relation DB = Dp . cos(α) où Dp désigne le diamètre primitif de la denture et α son angle de pression, pour une denture classique normalisée à profil en développante de cercle.
- Dans un mode de réalisation préféré, l'articulation 12 du segment 10 est située à l'intérieur d'un cercle de même centre que la roue 2 et de même diamètre que le diamètre de base DB de la denture de la roue 2, en vue de faciliter encore le réengrènement. Plus particulièrement, lors de la détente du ressort 4, les efforts presseurs F2 du pignon 3 sur la denture du segment 10 sont portés par un autre axe A2 également oblique. En positionnant l'articulation à l'intérieur du diamètre de base DB, cet autre axe A2 est situé de telle manière que l'articulation 12 se situe entre l'arbre d'enclenchement et cet autre axe A2. Comme la roue dentée est ici motrice, ces efforts F2 sont orientés de gauche à droite sur la
figure 8 , ce qui tend à faire tourner le segment 10 dans le sens direct DIR pour faire sortir ce segment et favoriser ainsi le réaccouplement du pignon 3 avec la denture du segment. Ainsi, le risque de bloquage du pignon 3 est encore minimisé, ce qui améliore significativement la sûreté de fonctionnement de la commande. Comme visible dans lafigure 8 , le diamètre de base de la denture correspond au diamètre d'un cercle centré sur la roue 2 et tangent à l'axe A2 ainsi qu'à l'axe A1. - Avantageusement, l'axe de l'articulation 12 du segment 10 est sensiblement éloigné du diamètre de base DB de la roue dentée 2 pour que le déplacement des dents du segment rétractable 10 ait lieu selon une direction oblique par rapport à la direction radiale de la roue dentée 2. En d'autres termes, plus l'axe de l'articulation 12 est proche du diamètre de base DB, plus le déplacement des dents du segment rétractable 10 est radial; et plus cet axe est éloigné du diamètre de base DB, plus ce déplacement s'effectue avec une composante tangentielle non négligeable selon un axe tangentiel à la roue dentée 2.
- En positionnant l'axe de l'articulation 12 à une certaine distance du diamètre de base DB, la composante tangentielle du déplacement des dents du segment rétractable 10 favorise un engrènement anticipé du pignon 3 du moteur, c'est à dire un engrènement dans une situation pour laquelle le segment 10 n'est pas encore totalement sorti tandis que la roue dentée 2 commence à entraîner le pignon 3 en rotation. La suite de l'engrènement produit spontanément la sortie du segment 10, comme indiqué plus haut. Les efforts pressseurs F2 dus à l'engrènement sont ainsi diminués pendant la sortie du segment 10, par rapport à un système où l'axe de l'articulation 12 serait plus proche du diamètre de base DB de la roue dentée. La variation de ces efforts presseurs est aussi moins brutale pendant cette phase de début d'engrènement.
- Le fait que les dents du segment rétractable 10 puissent se déplacer légèrement dans une direction tangentielle permet aussi un désaccouplement mécanique relativement progressif entre le pignon 3 et le segment rétractable 10 lorsque le pignon entraîne en rotation la roue dentée 2 et que celle-ci atteint la première position angulaire comme représenté à la
figure 7 . - Finalement, le positionnement de l'axe de l'articulation 12 à une certaine distance du diamètre de base DB, ainsi que la disposition des dents du segment rétractable 10 espacées les unes des autres du même pas constant que sur la roue dentée 2, contribuent à améliorer la durée de vie d'une commande selon l'invention et permet aussi l'utilisation d'un matériau plastique tel qu'un polymère pour réaliser le segment rétractable sans risque d'usure prématurée des dents du segment.
- Concernant l'emplacement de l'axe de l'articulation 12, des essais ont montré que son positionnement à une distance du diamètre de base DB comprise entre une et deux fois la distance séparant le diamètre de base DB du diamètre primitif DP conduisent à des performances satisfaisantes de la commande selon l'invention.
- La commande selon l'invention pourra encore inclure un commutateur électrique d'alimentation du moteur destiné à gérer l'alimentation du moteur en fonction de la position angulaire de la roue dentée. Dans cet autre mode de réalisation préféré, la commande comprend également une seconde came 7 solidaire de l'arbre d'enclenchement et qui coopère avec un levier de commande 8, comme visible
figure 1 . Ce levier de commande 8 est monté rotatif à une première extrémité et a sa seconde extrémité maintenue en appui sur le contour de la seconde came 7 par un élément élastique 8' qui est ici un ressort hélicoïdal. Ce levier de commande est lié en mouvement à un commutateur électrique (non représenté) par l'intermédiaire de trois biellettes 9A, 9B, 9C de manière à commander l'alimentation électrique du moteur. Le contour de la seconde came 7 forme un arc de spirale centré sur l'arbre d'enclenchement qui se referme sur lui-même par un décrochement. Quand la seconde extrémité du levier de commande 8 est placée dans le décrochement du contour de la came 7, c'est à dire au plus près de l'arbre d'enclenchement 1 comme visible sur lafigure 1 , le commutateur électrique est mis en position pour couper l'alimentation électrique du moteur ce qui correspond à la fin du réarmement du ressort 4. Quand la seconde extrémité du levier de commande 8 est placée sur une zone de l'arc de spirale proche de l'arbre d'enclenchement, le commutateur électrique est mis en position pour commander l'alimentation électrique du moteur de manière à réarmer automatiquement le ressort après sa détente. Le commutateur est ainsi actionné pour couper l'alimentation électrique du moteur quand la roue dentée atteint la première position angulaire alors que le segment rétractable assure le désaccouplage instantané du moteur. Ce commutateur commande l'alimentation électrique du moteur peu avant ou peu après la détente complète du ressort pour retendre ce dernier, c'est-à-dire quand l'arbre atteint sa seconde position angulaire. La commande mécanique à ressort selon l'invention se réarme ainsi de façon autonome après chaque détente du ressort 4.
Claims (7)
- Commande mécanique à ressort pour disjoncteur destiné à un réseau haute ou moyenne tension, comprenant une roue dentée (2) entraînée en rotation par un, ressort (4) d'une première position angulaire vers une seconde position angulaire et un pignon (3) coopérant avec la roue dentée pour la déplacer depuis la seconde position angulaire vers la première position angulaire afin de tendre ledit ressort, ladite roue dentée ayant une denture périphérique constituée d'une part d'une denture primitive solidaire de la roue et d'autre part d'une partie de denture sous la forme d'un segment denté rétractable (10), ladite denture primitive étant à pas constant, caractérisée en ce que ledit segment rétractable (10) comprend au moins quatre dents espacées une à une du même pas constant que le pas de ladite denture primitive.
- Commande selon la revendication 1, dans laquelle ledit segment (10) est articulé dans ladite roue dentée (2) par l'intermédiaire d'un axe (12) fixé à une première extrémité dudit segment, et dans laquelle ledit axe (12) est situé à l'intérieur du diamètre de base (DB) de la denture de ladite roue dentée (2).
- Commande selon la revendication 2, dans laquelle ledit axe (12) est situé à une distance du diamètre de base comprise entre une et deux fois la distance séparant le diamètre de base (DB) du diamètre primitif (DP) de la denture.
- Commande selon l'une des revendications 2 et 3, dans laquelle ledit segment est en appui sur un ressort de rappel (11) tendant à le maintenir sorti, ledit ressort de rappel étant constitué d'une lame en V coudée, les parties droites de cette lame formant entre elles un angle compris entre 10° et 20°.
- Commande selon l'une des revendications 1 à 4, dans laquelle ledit segment (10) se rétracte dans l'épaisseur de la roue dentée (2).
- Commande selon la revendication 5, dans laquelle le segment (10) se rétracte entre deux plaques (2A, 2C) formant des flasques de la roue dentée (2).
- Commande selon la revendication 6, dans laquelle une plaque centrale (2B) est enserrée entre les deux plaques (2A, 2C), et dans laquelle les trois plaques sont munies chacune à leur périphérie de dents qui constituent la denture de la roue dentée (2).
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0206982 | 2002-06-06 | ||
| FR0206982A FR2840726B1 (fr) | 2002-06-06 | 2002-06-06 | Commande mecanique a ressort pour disjoncteur haute ou moyenne tension, comprenant une roue dentee cooperant avec un pignon |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1369886A1 EP1369886A1 (fr) | 2003-12-10 |
| EP1369886B1 true EP1369886B1 (fr) | 2011-03-02 |
Family
ID=29433337
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP03291308A Expired - Lifetime EP1369886B1 (fr) | 2002-06-06 | 2003-06-02 | Commande mécanique à ressort pour disjoncteur haute ou moyenne tension, comprenant une roue dentée coopérant avec un pignon |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US6809279B2 (fr) |
| EP (1) | EP1369886B1 (fr) |
| CN (1) | CN1264175C (fr) |
| AT (1) | ATE500601T1 (fr) |
| DE (1) | DE60336191D1 (fr) |
| FR (1) | FR2840726B1 (fr) |
| IN (1) | IN2003DE00778A (fr) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2420447B (en) * | 2004-11-19 | 2008-02-27 | Invensys Controls Uk Ltd | Switching mechanism |
| US7319203B1 (en) * | 2007-01-10 | 2008-01-15 | Eaton Corporation | Circuit interrupter and operating mechanism therefor |
| US7411145B1 (en) * | 2007-04-10 | 2008-08-12 | Eaton Corporation | Motor operator de-coupling system sensing camshaft position |
| FR2925210B1 (fr) | 2007-12-17 | 2010-01-15 | Areva T&D Ag | Commande compacte pour appareillage electrique moyennes et hautes tensions |
| FR2925211B1 (fr) | 2007-12-17 | 2010-01-15 | Areva T & D Ag | Commande compacte et robuste pour appareillage electrique moyennes et hautes tensions |
| KR101291791B1 (ko) * | 2011-09-05 | 2013-07-31 | 현대중공업 주식회사 | 가스절연 개폐기의 드라이버 |
| CN102522232B (zh) * | 2011-12-13 | 2014-08-13 | 常熟开关制造有限公司(原常熟开关厂) | 断路器操作机构 |
| FR2990051B1 (fr) * | 2012-04-25 | 2014-05-30 | Alstom Technology Ltd | Commande de type a ressort(s) d'un interrupteur a haute ou moyenne tension munie d'un dispositif d'accouplement a roue libre a cliquet |
| CN102867677A (zh) * | 2012-09-26 | 2013-01-09 | 中电装备恩翼帕瓦(山东)高压开关有限公司 | 一种断路器弹簧储能机构的制动装置 |
| CN102881474B (zh) * | 2012-10-15 | 2014-12-24 | 上海思源高压开关有限公司 | 弹簧储能控制模块及其操动机构和断路器 |
| CN104036984A (zh) * | 2014-07-04 | 2014-09-10 | 特变电工中发上海高压开关有限公司 | 一种电动操动机构的制动装置 |
| DE102014116398A1 (de) * | 2014-11-11 | 2016-05-12 | Eaton Electrical Ip Gmbh & Co. Kg | Vorrichtung zur Betätigung eines Drehschalters |
| EP4386798A3 (fr) * | 2015-07-03 | 2024-08-28 | General Electric Technology GmbH | Unité d'entraînement pour un disjoncteur moyenne ou haute tension |
| FR3087044B1 (fr) * | 2018-10-03 | 2021-01-01 | Schneider Electric Ind Sas | Module de verrouillage d'un systeme d'armement pour appareil electrique interrupteur |
| CN108943612A (zh) * | 2018-10-15 | 2018-12-07 | 金陵科技学院 | 一种抽芯距可调的注塑模具 |
| CN110486447A (zh) * | 2019-09-19 | 2019-11-22 | 广东电网有限责任公司 | 一种非全圆被动齿轮 |
| EP3828442A1 (fr) * | 2019-11-26 | 2021-06-02 | Maxon International AG | Roue dentée souple et boîte de vitesses dotée d'une telle roue dentée souple |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0222946A1 (fr) * | 1985-11-18 | 1987-05-27 | Pitney Bowes PLC | Dispositif d'engrenages avec dispositif d'anticoinçage |
| JPH0693338B2 (ja) * | 1987-05-13 | 1994-11-16 | 三菱電機株式会社 | 遮断器の操作機構 |
| JP2529309B2 (ja) * | 1987-12-11 | 1996-08-28 | 三菱電機株式会社 | 遮断器の操作機構 |
| JP3271490B2 (ja) * | 1995-10-12 | 2002-04-02 | 三菱電機株式会社 | 遮断器の操作機構 |
| FR2763740B1 (fr) * | 1997-05-26 | 1999-07-16 | Gec Alsthom T & D Ag | Mecanisme d'entrainement a ressort pour un appareil de commutation, en particulier un disjoncteur |
| FR2770929B1 (fr) * | 1997-11-13 | 2000-01-28 | Alsthom Gec | Mecanisme d'entrainement a ressort pour un appareil de commutation, en particulier un disjoncteur |
-
2002
- 2002-06-06 FR FR0206982A patent/FR2840726B1/fr not_active Expired - Lifetime
-
2003
- 2003-06-02 DE DE60336191T patent/DE60336191D1/de not_active Expired - Lifetime
- 2003-06-02 EP EP03291308A patent/EP1369886B1/fr not_active Expired - Lifetime
- 2003-06-02 AT AT03291308T patent/ATE500601T1/de not_active IP Right Cessation
- 2003-06-03 US US10/452,281 patent/US6809279B2/en not_active Expired - Lifetime
- 2003-06-05 IN IN778DE2003 patent/IN2003DE00778A/en unknown
- 2003-06-06 CN CNB031472249A patent/CN1264175C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE60336191D1 (de) | 2011-04-14 |
| US6809279B2 (en) | 2004-10-26 |
| FR2840726B1 (fr) | 2004-11-12 |
| ATE500601T1 (de) | 2011-03-15 |
| CN1471117A (zh) | 2004-01-28 |
| CN1264175C (zh) | 2006-07-12 |
| FR2840726A1 (fr) | 2003-12-12 |
| US20040003989A1 (en) | 2004-01-08 |
| EP1369886A1 (fr) | 2003-12-10 |
| IN2003DE00778A (fr) | 2015-06-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1369886B1 (fr) | Commande mécanique à ressort pour disjoncteur haute ou moyenne tension, comprenant une roue dentée coopérant avec un pignon | |
| EP0881652B1 (fr) | Mécanisme d'entraínement à ressort pour un appareil de commutation, en particulier un disjoncteur | |
| EP2073228B1 (fr) | Commande compacte pour appareillage électrique moyennes et hautes tensions | |
| EP2056313B1 (fr) | Actionneur électromécanique et sectionneur haute ou moyenne tension muni d'un tel actionneur | |
| EP1170769A1 (fr) | Mécanisme de fermeture brusque pour appareil électrique modulaire de type disjoncteur | |
| EP0161120B1 (fr) | Combiné pour coupure en charge et le sectionnement visible d'un circuit électrique | |
| EP0150641B1 (fr) | Dispositif d'essuie-glace à mecanisme de changement de longueur efficace de la timonerie, pour l'escamotage du balai en position de repos | |
| EP3561832A1 (fr) | Module de transmission d'un effort | |
| EP2842143B1 (fr) | Commande de type a ressort(s) d'un interrupteur à haute ou moyenne tension munie d'un dispositif d'accouplement à roue libre à cliquet | |
| EP0917168B1 (fr) | Mécanisme d'entrainement à ressort pour un appareil de commutation, en particulier un disjoncteur | |
| EP1331658A1 (fr) | Appareillage électrique de coupure muni d'une commande motorisée et procédé de commande d'un tel appareillage | |
| FR2611549A3 (fr) | Cisaille motorisee auto-alimentee | |
| CA3044719A1 (fr) | Lien pour mecanismes de transmission | |
| EP2575150B1 (fr) | Dispositif de débrayage de la motorisation du dispositif de réarmement du dispositif de fermeture des contacts dans un appareil de protection électrique et appareil le comportant | |
| EP0895260B1 (fr) | Dispositif de commande rapide pour un appareil de connexion à haute tension, notamment un sectionneur de terre | |
| EP1670009B1 (fr) | Mecanisme de commande d'un interrupteur électrique multipolaire | |
| FR2865518A1 (fr) | Procede de commande de deplacement reversible d'un bras en rotation et dispositif de mise en oeuvre. | |
| FR2676383A1 (fr) | Dispositif de pose d'un adaptateur sur une ebauche de verre optique. | |
| EP0797230B1 (fr) | Dispositif de télécommande à motoréducteur équipé d'un embrayage centrifuge | |
| EP0857608B1 (fr) | Projecteur pour véhicule automobile comportant des moyens de réglage de faisceau perfectionnés | |
| EP1649478A1 (fr) | Mecanisme de serrure a accrochage tournant pour coupe-circuit automatique de securite | |
| EP0518768B1 (fr) | Dispositif de commutation pour programmateur d'appareil électrodomestique | |
| FR2551914A1 (fr) | Auxiliaire de telecommande pour enclenchement a distance d'un disjoncteur a prehenseur d'enclenchement et de declenchement | |
| EP0327460A1 (fr) | Interrupteur électrique à coupure automatique, en particulier interrupteur différentiel | |
| FR2873868A1 (fr) | Ensemble de commande, notamment pour un dispositif de coupur e et de fermeture du circuit d'une batterie electrique |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK |
|
| 17P | Request for examination filed |
Effective date: 20040601 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT RO SE SI SK TR |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: AREVA T&D SA |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: AREVA T&D SA |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: AREVA T&D SAS |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: AREVA T&D SAS |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REF | Corresponds to: |
Ref document number: 60336191 Country of ref document: DE Date of ref document: 20110414 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 60336191 Country of ref document: DE Effective date: 20110414 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20110302 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110613 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110603 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110602 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110704 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 |
|
| BERE | Be: lapsed |
Owner name: AREVA T&D SAS Effective date: 20110630 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20111205 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20110602 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 60336191 Country of ref document: DE Effective date: 20111205 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110602 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: CA Effective date: 20121204 Ref country code: FR Ref legal event code: CD Owner name: ALSTOM GRID SAS, FR Effective date: 20121204 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 60336191 Country of ref document: DE Owner name: ALSTOM GRID SAS, FR Free format text: FORMER OWNER: AREVA T&D SAS, PARIS, FR Effective date: 20130225 Ref country code: DE Ref legal event code: R082 Ref document number: 60336191 Country of ref document: DE Representative=s name: ZEITLER VOLPERT KANDLBINDER, DE Effective date: 20130225 Ref country code: DE Ref legal event code: R081 Ref document number: 60336191 Country of ref document: DE Owner name: ALSTOM TECHNOLOGY LTD., CH Free format text: FORMER OWNER: AREVA T&D SAS, PARIS, FR Effective date: 20130225 Ref country code: DE Ref legal event code: R081 Ref document number: 60336191 Country of ref document: DE Owner name: ALSTOM TECHNOLOGY LTD., CH Free format text: FORMER OWNER: ALSTOM, PARIS, FR Effective date: 20110203 Ref country code: DE Ref legal event code: R082 Ref document number: 60336191 Country of ref document: DE Representative=s name: ZEITLER VOLPERT KANDLBINDER PATENT- UND RECHTS, DE Effective date: 20130225 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110602 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 60336191 Country of ref document: DE Representative=s name: ZEITLER VOLPERT KANDLBINDER, DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 60336191 Country of ref document: DE Owner name: ALSTOM TECHNOLOGY LTD., CH Free format text: FORMER OWNER: ALSTOM GRID SAS, PARIS, FR Effective date: 20130618 Ref country code: DE Ref legal event code: R082 Ref document number: 60336191 Country of ref document: DE Representative=s name: ZEITLER VOLPERT KANDLBINDER, DE Effective date: 20130618 Ref country code: DE Ref legal event code: R082 Ref document number: 60336191 Country of ref document: DE Representative=s name: ZEITLER VOLPERT KANDLBINDER PATENT- UND RECHTS, DE Effective date: 20130618 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: TP Owner name: ALSTOM TECHNOLOGY LTD, CH Effective date: 20130710 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PUE Owner name: ALSTOM TECHNOLOGY LTD, CH Free format text: FORMER OWNER: AREVA T&D SAS, FR |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20170627 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20170622 Year of fee payment: 15 Ref country code: SE Payment date: 20170628 Year of fee payment: 15 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180603 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180602 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180630 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20220518 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20220702 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 60336191 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230522 |