EP1055620B1 - Device for picking up and/or transporting flexible and flat products - Google Patents
Device for picking up and/or transporting flexible and flat products Download PDFInfo
- Publication number
- EP1055620B1 EP1055620B1 EP00110601A EP00110601A EP1055620B1 EP 1055620 B1 EP1055620 B1 EP 1055620B1 EP 00110601 A EP00110601 A EP 00110601A EP 00110601 A EP00110601 A EP 00110601A EP 1055620 B1 EP1055620 B1 EP 1055620B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- gripper
- suction
- grippers
- receiving
- transfer region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H29/00—Delivering or advancing articles from machines; Advancing articles to or into piles
- B65H29/66—Advancing articles in overlapping streams
- B65H29/6609—Advancing articles in overlapping streams forming an overlapping stream
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H3/00—Separating articles from piles
- B65H3/42—Separating articles from piles by two or more separators mounted for movement with, or relative to, rotary or oscillating bodies
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H5/00—Feeding articles separated from piles; Feeding articles to machines
- B65H5/08—Feeding articles separated from piles; Feeding articles to machines by grippers, e.g. suction grippers
- B65H5/085—Feeding articles separated from piles; Feeding articles to machines by grippers, e.g. suction grippers by combinations of endless conveyors and grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2301/00—Handling processes for sheets or webs
- B65H2301/40—Type of handling process
- B65H2301/44—Moving, forwarding, guiding material
- B65H2301/447—Moving, forwarding, guiding material transferring material between transport devices
- B65H2301/4472—Suction grippers, e.g. moved in paths enclosing an area
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2301/00—Handling processes for sheets or webs
- B65H2301/40—Type of handling process
- B65H2301/44—Moving, forwarding, guiding material
- B65H2301/447—Moving, forwarding, guiding material transferring material between transport devices
- B65H2301/4473—Belts, endless moving elements on which the material is in surface contact
- B65H2301/44732—Belts, endless moving elements on which the material is in surface contact transporting articles in overlapping stream
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2301/00—Handling processes for sheets or webs
- B65H2301/40—Type of handling process
- B65H2301/44—Moving, forwarding, guiding material
- B65H2301/447—Moving, forwarding, guiding material transferring material between transport devices
- B65H2301/4474—Pair of cooperating moving elements as rollers, belts forming nip into which material is transported
Definitions
- the invention relates to a device for removal and / or further transportation of flexible, flat products, especially printed products, with a plurality movable along a gripper conveyor line, in the direction of transport successive grippers and one A plurality of suction elements that can be moved along a suction element conveying path for the reception in a reception and transfer area one product at a time and for handing over the recorded product Product to a gripper.
- Such devices are known from EP-A-0 628 505 and are suitable for being arranged in a stack or products delivered in scale form individually using the absorbing devices mentioned and the absorbed products to hand over to grippers, who then grasp the gripped products Carry out further processing.
- Each of the suction organs Always pass the gripper exactly one product, so that it is the one named Device allows to take the products individually and them to be fed individually for further processing.
- An object of the invention is that described above Develop devices in such a way that with economically justifiable Effort on the one hand increases the security of an error-free Acceptance and delivery of the products can be guaranteed and on the other hand an increase in the speed of recording and Transfer process becomes possible.
- this object is achieved in that the from the swivel axes of the suction heads in the pick-up and transfer area, the path along or parallel to the gripper conveyor line.
- suction organs and grippers during the process of receiving and transferring products uniformly along an at least largely common trajectory forth.
- This has compared to known devices in which suction elements and grippers during the pick-up and transfer process move on different trajectories, the advantage that no relative movements caused by different trajectory curves occur between suction elements and grippers, so that the invention corresponding to each other at the same speed Suction elements and grippers with trajectory curves with their base or Carrier units are arranged largely stationary to one another.
- the length of the along or parallel to the gripper conveyor line running section of the suction member conveyor line so is dimensioned that at least two successive grippers in this Find a section.
- the gripper conveyor line and the suction element conveyor line can in Pick-up and transfer area, for example on concentric circular paths run. This enables an easy funding opportunity for Suction elements and grippers, since in both cases a drive by means of or several transport wheels is possible.
- Grippers and a suction element are assigned to each other.
- the gripper corresponds to the distance between two successive suction elements. So a gripper and a suction element with optimized Distance from each other the receiving and transfer area on their go through corresponding trajectories, which in terms of the overall arrangement to be operated mechanical effort minimized and the correctness and speed of the recording and transfer process optimized.
- the suction member conveyor section and the gripper conveyor section preferably run in the receiving and transfer area approximately in the middle, in particular centered over the products to be picked up. This ensures that laterally next to the products to be picked up and picked up no mechanical devices have to be provided.
- suction elements and grippers can be conveyed by a transport wheel in the receiving and transfer area. It is also possible to provide only a single transport wheel, which conveys both the suction elements and the grippers in the receiving and transfer area.
- the grippers are conveyed by means of a separate or common transport wheel, they can either be releasably or non-releasably coupled to the transport wheel during transport. If the coupling cannot be detached, the grippers generally describe a circular path around the transport wheel, a section of this circular path forming the receiving and transfer area. In another section of the circular path, the products previously transferred to the grippers are then delivered to a downstream conveying device or any other processing station.
- the grippers can leave the circular path of the transport wheel after picking up a product in order to convey the picked products into an area spaced apart from the transport wheel.
- the grippers are preferably coupled to a conveying means which runs in the receiving and transfer area along the corresponding section of the transport wheel.
- the suction elements are each pivotable between one Pick-up and a transfer position on the suction organ transport wheel or on the respectively assigned base or carrier unit, which in turn is firmly coupled to the transport wheel, are held.
- the suction elements can be swiveled during recording and
- the transfer process can be controlled in such a way that between the suction element and the associated gripper creates a relative movement, which is why ensures that a sucked product is handed over to the gripper.
- the suction elements are in their transfer position effective leadership means for a defined leadership not product held by suction between the guide means and have a back pressure device.
- This leadership tool is used for the already picked up and transferred to a gripper Products defined according to their pick-up and transfer process and ensure that the section of the product that is not held by a gripper, not uncontrolled can move and also preferably not with one or in contact with several grippers running in the conveying direction comes.
- the interaction of the guide means with the back pressure device also make sure that on a gripper transferred products are still safely managed when the respective grippers for the purpose of further transport or further processing has already released again.
- each associated with a suction element Gripper is designed as a pair of grippers, the suction member in the pick-up and transfer area between the two grippers of each assigned gripper pair is arranged.
- each suction member assigned to a gripper is designed as a pair of suction members with the gripper in the receiving and transfer area then between the two suction elements of the respectively associated suction element pair is arranged.
- the gripper movements, the suction member movements as well as the activation of the suction elements preferably from control links and / or toothed belt drives controlled.
- Fig. 1 shows a side view of a device according to the invention a transport wheel 1 rotating in the direction of the arrow, which runs along its Circumferentially at equidistant intervals with suction elements 2 and grippers 3 is coupled.
- the number of suction elements coupled to the transport wheel 1 2 is equal to the number of those coupled to the transport wheel 1 Gripper 3.
- Suction elements 2 and 3 are along the circumference of the Transport wheels 1 arranged offset from one another such that a Suction element 2 between two grippers 3 or a gripper 3 between two Suction elements 2 comes to rest.
- the suction elements 2 each have a base or carrier unit 4, which is firmly and rigidly coupled to the transport wheel 1.
- Gripper 3 a base or carrier unit 5, which is rigid and rigid with the Transport wheel 1 is coupled.
- Base or carrier units 4 and 5 of the suction elements 2 and the grippers 3 are thus arranged and guide with respect to the transport wheel 1 even when the transport wheel 1 rotates, no relative movements to one another out.
- the suction members 2 each have a suction head 6, which by one Axis 7 pivotable on the base or support unit 4 of the respective Suction device 2 is stored.
- the axis 7 extends in turn perpendicular to the direction of rotation of the transport wheel 1.
- a product stack 8 below the transport wheel 1 is a product stack 8, in particular a Stack of printed matter 9 arranged, of which by means of in Fig. 1 device shown products 9 individually from the suction elements 2 picked up and transferred to a gripper 3.
- the admission and transfer process takes place in the lower one Area of the transport wheel 1.
- the products handed over to the grippers 3 are turned counterclockwise by rotating the transport wheel 1 on a circular orbit in the upper area of the Transport wheels 1 promoted, which are not held by the grippers 3 Sections of the products 9 due to gravity freely after hanging down.
- the suction members 2 each have a guide surface 11, against which the named sections of the products can come to rest.
- these guide surfaces 11 could also be designed as guide rollers, for example.
- the guide surfaces 11 support the products 9 in the upper region of the transport wheel from below, with the product length shown in FIG. 1 ultimately supporting a product 9 by two guide surfaces 11 of adjacent suction members 2.
- a spring-loaded pressure belt 12 provided, which ensures that the products 9 against the guide surfaces 11 of the suction elements 2 are pressed so that the products 9 ultimately between these guide surfaces 11 and the pressure belt 12 are defined. This leadership role will also still executed when the grippers 3 are already open and the Products 9 have released, which ultimately means that the products 9 in the upper area of the transport wheel 1, in which the grippers 3 are opened are exclusively from the guide surfaces 11 and the pressure belt 12 are held and guided.
- a dashed line runs radially inward from the pressure band 12, only schematically indicated ribbon conveyor 13, which ensures that the leading end portions of the between guide surfaces 11 and pressure belt 12 held products 9 raised and thus radially outward from the orbit of the transport wheel 1 be guided away in order in this way to a downstream of the transport wheel 1 Conveyor belt 14 can be fed.
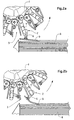
- Fig. 2a illustrates that the suction head 6 one.
- Suction device 2 for recording of a product 9 relative to the base or carrier unit 4 is pivoted that the suction direction of the suction head 6 essentially is oriented perpendicular to the product surface.
- the one Suction head 6 having bellows suction cups so close to the one to be accommodated Product 9 introduced that a suction of the product 9 takes place.
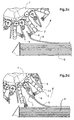
- the sucked product 9 is replaced by a product in the direction of the arrow Rotation of the transport wheel 1 as well as by a clockwise Swiveling movement of the suction head 6 relative to the base or Carrier unit 4 increasingly lifted off the product stack 8, what can be seen from FIGS. 2b and 2c.
- This lifting process is ongoing such that the sucked end of the product 9 into the receiving area of the suction element 2 in the direction of rotation of the transport wheel 1 downstream gripper 3 arrives (Fig. 2c).
- the gripper 3 can then be closed and switched off the suction of the suction head 6 take place, which leads to the fact that the product 9 originally picked up by the suction head 6 to the gripper 3 was passed and accordingly only held by the gripper 3 will (Fig. 2d).
- Fig. 3 shows a side view of a second embodiment of an inventive Contraption.
- the suction members 2 are fixed with a transport wheel 15 coupled, while the grippers 3 releasably engaged with the transport wheel 15 are feasible.
- the grippers 3 are only schematically dash-dotted with one indicated funding 16 coupled, which is suitable is the gripper 3 of the lower half of the orbit of the transport wheel 15 feed (arrow A) and remove them from this area (Arrow B).
- the transport wheel 15 is distributed along its circumference with equidistant Grooves 17 provided for receiving the pivot axes 18 of the grippers 3 serve. Relative to the circumference of the transport wheel 15 is one Groove 17 is provided in the middle between two adjacent suction elements 2.
- the pivot axes 18 of the grippers 3 are with the conveyor 16 coupled and thus form the basic or Carrier units of the grippers 3.
- the device shown in FIG. 3 ensures that the arrangement of suction elements 2 and grippers 3 in the receiving and transfer section of the transport wheel 15 corresponds exactly to the arrangement that has already been explained with reference to FIG. 1.
- the functional sequence of the recording and transfer process is accordingly the same for the two devices according to FIGS. 1 and 3.
- the essential difference between the two devices is that the products transferred from the suction elements 2 to the grippers 3 can be conveyed away from the area of the transport wheel 15 together with the respectively assigned grippers 3 with a device according to FIG. 3, so that accordingly in the area of the transport wheel 15, in contrast to the device according to FIG. 1, the grippers 3 are not opened after picking up a product.
- Fig. 4 illustrates that both the device of Fig. 1 and 3 not only for receiving stacked products, but also to accommodate delivered in scale formation Products 9 can serve.
- the admission and handover process is essentially identical here, the only difference is in that the products themselves during the reception and Transfer process in the direction of arrow C are promoted.
- Fig. 5 shows a side view of a usable according to the invention Gripper 3.
- This gripper 3 has a base or carrier unit 5, which is firmly coupled to the transport wheel 1, which is only shown in certain areas.
- the leg 19 leading in the direction of rotation of the transport wheel 1 is made of rigid material, while the corresponding trailing Leg 20 is resilient, so the recording is different thicker products 9 without significant changes in control to enable the gripper 3.
- Both legs 19, 20 each have one at their radially inner end Guide roller 21, 22, at least in the receiving and transfer area of the transport wheel 1 along guide links, not shown run and thus the desired opening and closing movements of the gripper 3.
- FIG. 6 shows a frontal view of a gripper designed as a pair of grippers 3.
- the gripper 3 accordingly consists of two side by side arranged gripper elements 23, each gripper element 23 each has two legs 19, 20 for gripping a product 9.
- leading leg of the two gripper elements 23 are fixed coupled with each other, their movement from the common leadership role 22 is triggered, which is in the receiving and transfer area of the Transport wheels 1 runs along a guide link, not shown.
- suction head 6 of a suction element 2 is arranged centrally between the two gripper elements 23, so that the suction head 6 easily defines and controls a product 9 can move the area of the open gripper legs without The suction head 6 and gripper elements 23 collide with one another.
- the ribbon conveyor 13 according to FIG. 1 can be formed as a pair of ribbons in this embodiment, whereby it is achieved that a lifting of the product 9 from both Gripper elements 23 can be done easily.
- Fig. 7 shows schematically that alternatively to the embodiment according to 6, only a single gripper 25 can be used, which has two gripper legs 26 and 27, between which a product 9 is held.
- a suction member 28 is arranged on the right next to the individual gripper 25 is the necessary for the recording and transfer process pivoting movements Execute in parallel and synchronously with each other. Is preferred it occurs when both suction elements 28 are mechanically rigidly coupled to one another become. Just like the movements of the suction elements 28, this takes place Activation of the suction function in both suction elements 28 in a time-synchronous manner Wise.
- FIG. 7 can be particularly advantageous in an arrangement according to FIG. 3 with rotating on a transport wheel 15 Suction elements 2 and grippers conveyed along a conveying means 16 3 are used.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Feeding Of Articles By Means Other Than Belts Or Rollers (AREA)
- Sheets, Magazines, And Separation Thereof (AREA)
- Specific Conveyance Elements (AREA)
- Discharge By Other Means (AREA)
- Massaging Devices (AREA)
- Surface Heating Bodies (AREA)
- Refuse Collection And Transfer (AREA)
- Control And Other Processes For Unpacking Of Materials (AREA)
- Supplying Of Containers To The Packaging Station (AREA)
- External Artificial Organs (AREA)
Abstract
Description
Die Erfindung betrifft eine Vorrichtung zum Ab- und/oder Weitertransportieren von flexiblen, flächigen Erzeugnissen, insbesondere Druckereierzeugnissen, mit einer Mehrzahl entlang einer Greifer-Förderstrecke bewegbaren, in Transportrichtung aufeinanderfolgenden Greifern und einer Mehrzahl von entlang einer Saugorgan-Förderstrecke bewegbaren Saugorganen zur in einem Aufnahme- und Übergabebereich erfolgenden Aufnahme jeweils eines Erzeugnisses und zur Übergabe des aufgenommenen Erzeugnisses an einen Greifer.The invention relates to a device for removal and / or further transportation of flexible, flat products, especially printed products, with a plurality movable along a gripper conveyor line, in the direction of transport successive grippers and one A plurality of suction elements that can be moved along a suction element conveying path for the reception in a reception and transfer area one product at a time and for handing over the recorded product Product to a gripper.
Derartige Vorrichtungen sind aus der EP-A-0 628 505 bekannt und sind dazu geeignet, stapelförmig angeordnete oder in Schuppenformation angelieferte Erzeugnisse einzeln mittels der genannten Saugorgane aufzunehmen und die aufgenommenen Erzeugnisse an Greifer zu übergeben, die die gegriffenen Erzeugnisse dann ihrer Weiterverarbeitung zuführen. Dabei wird von den Saugorganen jedem Greifer immer genau ein Erzeugnis übergeben, so daß es die genannte Vorrichtung ermöglicht, die Erzeugnisse einzeln aufzunehmen und sie einzeln ihrer Weiterverarbeitung zuzuführen.Such devices are known from EP-A-0 628 505 and are suitable for being arranged in a stack or products delivered in scale form individually using the absorbing devices mentioned and the absorbed products to hand over to grippers, who then grasp the gripped products Carry out further processing. Each of the suction organs Always pass the gripper exactly one product, so that it is the one named Device allows to take the products individually and them to be fed individually for further processing.
Eine Aufgabe der Erfindung besteht darin, die vorstehend beschriebenen Vorrichtungen derart weiterzubilden, daß mit wirtschaftlich vertretbarem Aufwand zum einen in erhöhtem Maße die Sicherheit einer fehlerfreien Aufnahme und Übergabe der Erzeugnisse garantiert werden kann und zum anderen eine Erhöhung der Geschwindigkeit des Aufnahme- und Übergabeprozesses möglich wird.An object of the invention is that described above Develop devices in such a way that with economically justifiable Effort on the one hand increases the security of an error-free Acceptance and delivery of the products can be guaranteed and on the other hand an increase in the speed of recording and Transfer process becomes possible.
Erfindungsgemäß wird diese Aufgabe dadurch gelöst, daß die von den Schwenkachsen der Saugkopfe im Aufnahme- und Übergabebereich durchlaufene Bahn entlang oder parallel zur Greifer-Förderstrecke verläuft.According to the invention this object is achieved in that the from the swivel axes of the suction heads in the pick-up and transfer area, the path along or parallel to the gripper conveyor line.
Durch diesen erfindungsgemäßen Verlauf der Saugorgan- und der Greifer-Förderstrecke wird erreicht, daß sich Saugorgane und Greifer während des Aufnahme- und Übergabeprozesses von Erzeugnissen gleichförmig entlang einer zumindest weitgehend gemeinsamen Bahnkurve nebeneinander herbewegen. Dies hat gegenüber bekannten Vorrichtungen, bei denen sich Saugorgane und Greifer während des Aufnahme- und Übergabeprozesses auf unterschiedlichen Bahnkurven bewegen, den Vorteil, daß keine durch unterschiedliche Bahnkurven bedingten Relativbewegungen zwischen Saugorganen und Greifern auftreten, so daß die sich erfindungsgemäß mit gleicher Geschwindigkeit auf einander entsprechenden Bahnkurven bewegenden Saugorgane und Greifer mit ihren Basis- bzw. Trägereinheiten weitgehend ortsfest zueinander angeordnet sind. Hierdurch ergibt sich eine vereinfachte Ansteuerung und Synchronisation der beweglichen bzw. steuerbaren Saugorgan- und Greiferteile, da bei dieser Steuerung und Synchronisation keine unterschiedlichen Bahnkurven der Basis- bzw. Trägereinheiten von Saugorganen und Greifern berücksichtigt werden müssen. Aufgrund dieser Vereinfachung werden Fehler bei der Aufnahme und Übergabe der Erzeugnisse weitgehend ausgeschlossen. Zudem bedingt die genannte Vereinfachung, daß der Aufnahme- und Übergabeprozeß mit hoher Geschwindigkeit vonstatten gehen kann, ohne daß hierdurch eine Beeinträchtigung des fehlerfreien Ablaufs des Aufnahme- und Übergabeprozesses in Kauf genommen werden müßte.Through this course of the suction member and the gripper conveyor line according to the invention is achieved that suction organs and grippers during the process of receiving and transferring products uniformly along an at least largely common trajectory forth. This has compared to known devices in which suction elements and grippers during the pick-up and transfer process move on different trajectories, the advantage that no relative movements caused by different trajectory curves occur between suction elements and grippers, so that the invention corresponding to each other at the same speed Suction elements and grippers with trajectory curves with their base or Carrier units are arranged largely stationary to one another. hereby this results in a simplified control and synchronization of the movable or controllable suction organ and gripper parts, as with this Control and synchronization no different trajectories of the Base and carrier units of suction elements and grippers are taken into account Need to become. Due to this simplification, errors in the Acceptance and handover of the products largely excluded. In addition, the aforementioned simplification requires that the admission and Handover process can proceed at high speed without that this impairs the error-free process of the recording and handover process would have to be accepted.
Bevorzugt ist es, wenn die Länge des entlang oder parallel zur Greifer-Förderstrecke verlaufenden Abschnitts der Saugorgan-Förderstrecke so bemessen ist, daß zumindest zwei aufeinanderfolgende Greifer in diesem Abschnitt Platz finden. Durch diese Mindestlänge des Abschnitts, in dem beide Förderstrecken entlang einander entsprechender Bahnkurven verlaufen, wird sichergestellt, daß der gesamte Aufnahme- und Übergabeprozeß innerhalb des genannten Abschnitts stattfinden kann, so daß Relativbewegungen der Basis- bzw. Trägereinheiten von Saugorganen und Greifern während dieses Prozesses ausgeschlossen werden können.It is preferred if the length of the along or parallel to the gripper conveyor line running section of the suction member conveyor line so is dimensioned that at least two successive grippers in this Find a section. By this minimum length of the section in which both conveyor lines run along corresponding curve curves, it is ensured that the entire admission and transfer process can take place within said section, so that relative movements the base or carrier units of suction elements and grippers can be excluded during this process.
Die Greifer-Förderstrecke und die Saugorgan-Förderstrecke können im Aufnahme- und Übergabebereich beispielsweise auf konzentrischen Kreisbahnen verlaufen. Dies ermöglicht eine einfache Fördermöglichkeit für Saugorgane und Greifer, da in beiden Fällen ein Antrieb mittels einer oder mehrerer Transporträder möglich wird.The gripper conveyor line and the suction element conveyor line can in Pick-up and transfer area, for example on concentric circular paths run. This enables an easy funding opportunity for Suction elements and grippers, since in both cases a drive by means of or several transport wheels is possible.
Von Vorteil ist es, wenn im Aufnahme- und Übergabebereich jeweils ein Greifer und ein Saugorgan einander zugeordnet sind. Insbesondere kann im Aufnahme- und Übergabebereich der Abstand zweier aufeinanderfolgender Greifer dem Abstand zweier aufeinanderfolgender Saugorgane entsprechen. So können jeweils ein Greifer und ein Saugorgan mit optimiertem Abstand zueinander den Aufnahme- und Übergabebereich auf ihren einander entsprechenden Bahnkurven durchlaufen, was den hinsichtlich der Gesamtanordnung zu betreibenden mechanischen Aufwand minimiert und die Fehlerfreiheit und Geschwindigkeit des Aufnahme- und Übergabeprozesses optimiert.It is advantageous if there is one in each of the receiving and transfer areas Grippers and a suction element are assigned to each other. In particular, can the distance between two successive ones in the receiving and transfer area The gripper corresponds to the distance between two successive suction elements. So a gripper and a suction element with optimized Distance from each other the receiving and transfer area on their go through corresponding trajectories, which in terms of the overall arrangement to be operated mechanical effort minimized and the correctness and speed of the recording and transfer process optimized.
Bevorzugt verlaufen Saugorgan-Förderstrecke und Greifer-Förderstrecke im Aufnahme- und Übergabebereich in etwa mittig entlang, insbesondere mittig über den aufzunehmenden Erzeugnissen. Dadurch wird erreicht, daß seitlich neben den aufzunehmenden und aufgenommenen Erzeugnissen keinerlei mechanische Einrichtungen vorgesehen werden müssen.The suction member conveyor section and the gripper conveyor section preferably run in the receiving and transfer area approximately in the middle, in particular centered over the products to be picked up. This ensures that laterally next to the products to be picked up and picked up no mechanical devices have to be provided.
Saugorgane und Greifer können - wie bereits erwähnt - im Aufnahme- und
Übergabebereich durch jeweils ein Transportrad gefördert werden. Ebenso
ist es möglich, lediglich ein einziges Transportrad vorzusehen, welches
sowohl die Saugorgane als auch die Greifer im Aufnahme- und Übergabebereich
fördert.
Für den Fall, daß die Greifer mittels eines separaten oder gemeinsamen
Transportrades gefördert werden, können diese während des Transports
entweder lösbar oder unlösbar mit dem Transportrad koppelbar sein. Bei
unlösbarer Koppelung beschreiben die Greifer grundsätzlich eine Kreisbahn
um das Transportrad, wobei ein Abschnitt dieser Kreisbahn den
Aufnahme- und Übergabebereich bildet. In einem anderen Abschnitt der
Kreisbahn erfolgt dann eine Abgabe der zuvor an die Greifer übergebenen
Erzeugnisse an eine nachgeschaltete Fördervorrichtung oder eine beliebige
andere Weiterverarbeitungsstation.
Bei lösbarer Koppelung der Greifer mit dem Transportrad können die
Greifer nach Aufnahme eines Erzeugnisses die Kreisbahn des Transportrades
verlassen, um die aufgenommenen Erzeugnisse in einen vom
Transportrad beabstandeten Bereich zu fördern. Zu diesem Zweck sind die
Greifer bevorzugt mit einem Fördermittel gekoppelt, welches im Aufnahme-
und Übergabebereich entlang des entsprechenden Abschnitts des
Transportrads verläuft.As already mentioned, suction elements and grippers can be conveyed by a transport wheel in the receiving and transfer area. It is also possible to provide only a single transport wheel, which conveys both the suction elements and the grippers in the receiving and transfer area.
In the event that the grippers are conveyed by means of a separate or common transport wheel, they can either be releasably or non-releasably coupled to the transport wheel during transport. If the coupling cannot be detached, the grippers generally describe a circular path around the transport wheel, a section of this circular path forming the receiving and transfer area. In another section of the circular path, the products previously transferred to the grippers are then delivered to a downstream conveying device or any other processing station.
If the grippers are detachably coupled to the transport wheel, the grippers can leave the circular path of the transport wheel after picking up a product in order to convey the picked products into an area spaced apart from the transport wheel. For this purpose, the grippers are preferably coupled to a conveying means which runs in the receiving and transfer area along the corresponding section of the transport wheel.
Es ist von Vorteil, wenn die Saugorgane jeweils schwenkbar zwischen einer Aufnahme- und einer Übergabeposition am Saugorgan-Transportrad bzw. an der jeweils zugeordneten Basis- bzw. Trägereinheit, welche ihrerseits fest mit dem Transportrad gekoppelt ist, gehalten sind. Durch diese Schwenkbarkeit können die Saugorgane während des Aufnahme- und Übergabeprozesses gezielt so angesteuert werden, daß zwischen Saugorgan und zugeordnetem Greifer eine Relativbewegung entsteht, welche dafür sorgt, daß ein angesaugtes Erzeugnis dem Greifer übergeben wird.It is advantageous if the suction elements are each pivotable between one Pick-up and a transfer position on the suction organ transport wheel or on the respectively assigned base or carrier unit, which in turn is firmly coupled to the transport wheel, are held. Through this The suction elements can be swiveled during recording and The transfer process can be controlled in such a way that between the suction element and the associated gripper creates a relative movement, which is why ensures that a sucked product is handed over to the gripper.
Weiterhin ist es vorteilhaft, wenn die Saugorgane ein in deren Übergabeposition wirksames Führungsmittel zum definierten Führen eines nicht mittels Saugwirkung gehaltenen Erzeugnisses zwischen dem Führungsmittel und einer Gegendruck-Vorrichtung aufweisen. Dieses Führungsmittel dient dazu, die bereits aufgenommenen und an einen Greifer übergebenen Erzeugnisse nach ihrem Aufnahme- und Übergabeprozeß definiert zu führen und dafür zu sorgen, daß sich derjenige Abschnitt des Erzeugnisses, der nicht von einem Greifer gehalten wird, nicht unkontrolliert bewegen kann und darüber hinaus bevorzugt auch nicht mit einem oder mehreren in Förderrichtung nachlaufenden Greifern in Berührung kommt. Insbesondere kann das Zusammenwirken des Führungsmittels mit der Gegendruck-Vorrichtung auch sicherstellen, daß an einen Greifer übergebene Erzeugnisse auch dann noch sicher geführt werden, wenn der jeweilige Greifer sie zum Zweck des Weitertransports oder der Weiterverarbeitung bereits wieder freigegeben hat. Furthermore, it is advantageous if the suction elements are in their transfer position effective leadership means for a defined leadership not product held by suction between the guide means and have a back pressure device. This leadership tool is used for the already picked up and transferred to a gripper Products defined according to their pick-up and transfer process and ensure that the section of the product that is not held by a gripper, not uncontrolled can move and also preferably not with one or in contact with several grippers running in the conveying direction comes. In particular, the interaction of the guide means with the back pressure device also make sure that on a gripper transferred products are still safely managed when the respective grippers for the purpose of further transport or further processing has already released again.
Die Wirkungsweise von Führungsmittel und Gegendruck-Vorrichtung wird im Rahmen der Figurenbeschreibung noch anschaulich erläutert.The mode of operation of the guide means and the counterpressure device will explained clearly in the context of the figure description.
Im Rahmen der Erfindung ist es möglich, daß jeder einem Saugorgan zugeordnete Greifer als Greiferpaar ausgebildet wird, wobei das Saugorgan im Aufnahme- und Übergabebereich zwischen den beiden Greifern des jeweils zugeordneten Greiferpaares angeordnet ist. Alternativ kann jedoch auch jedes einem Greifer zugeordnete Saugorgan als Saugorgan-Paar ausgebildet werden, wobei der Greifer im Aufnahme- und Übergabebereich dann zwischen den beiden Saugorganen des jeweils zugeordneten Saugorgan-Paares angeordnet ist.In the context of the invention it is possible that each associated with a suction element Gripper is designed as a pair of grippers, the suction member in the pick-up and transfer area between the two grippers of each assigned gripper pair is arranged. Alternatively, however each suction member assigned to a gripper is designed as a pair of suction members with the gripper in the receiving and transfer area then between the two suction elements of the respectively associated suction element pair is arranged.
Im Rahmen der Erfindung werden die Greiferbewegungen, die Saugorganbewegungen sowie die Aktivierung der Saugorgane bevorzugt von Steuerkulissen und/oder Zahnriemengetrieben gesteuert.In the context of the invention, the gripper movements, the suction member movements as well as the activation of the suction elements preferably from control links and / or toothed belt drives controlled.
Weitere bevorzugte Ausführungsformen der Erfindung sind in den Unteransprüchen angegeben.Further preferred embodiments of the invention are in the subclaims specified.
Die Erfindung wird nachfolgend anhand von Ausführungsbeispielen unter Bezugnahme auf die Zeichnungen erläutert; in diesen zeigen:
- Fig. 1
- eine Seitenansicht eines Ausführungsbeispiels einer erfindungsgemäßen Vorrichtung mit an einem Transportrad umlaufenden Greifern und Saugorganen, wobei die Vorrichtung zur Aufnahme von stapelförmig angeordneten Erzeugnissen eingesetzt ist,
- Fig. 2a bis d
- vier Verfahrensschritte des mittels der Vorrichtung gemäß Fig. 1 bewerkstelligten Aufnahme- und Übergabeprozesses,
- Fig. 3
- eine Seitenansicht einer zweiten Ausführungsform einer erfindungsgemäßen Vorrichtung mit an einem Transportrad umlaufenden Saugorganen und entlang eines Fördermittels geförderten Greifern, wobei die Vorrichtung ebenfalls zur Aufnahme von stapelförmig angeordneten Erzeugnissen eingesetzt ist,
- Fig. 4
- den Aufnahme- und Übergabeabschnitt einer Vorrichtung gemäß den Fig. 1 oder 3, wobei die Vorrichtung zur Aufnahme von schuppenförmig angelieferten Erzeugnissen eingesetzt ist,
- Fig. 5
- eine Seitenansicht eines erfindungsgemäß verwendbaren Greifers,
- Fig. 6
- eine Frontalansicht eines als Greiferpaar ausgebildeten Greifers mit innenliegendem Saugorgan, und
- Fig. 7
- eine Frontalansicht eines als Einzelgreifer ausgebildeten Greifers mit außenliegenden Saugorganen.
- Fig. 1
- 3 shows a side view of an exemplary embodiment of a device according to the invention with grippers and suction elements rotating on a transport wheel, the device being used to hold products arranged in a stack,
- 2a to d
- four process steps of the recording and transfer process carried out by means of the device according to FIG. 1,
- Fig. 3
- 2 shows a side view of a second embodiment of a device according to the invention with suction members rotating on a transport wheel and grippers conveyed along a conveying means, the device also being used for receiving products arranged in a stack,
- Fig. 4
- 1 or 3, the device being used for receiving products delivered in the form of scales,
- Fig. 5
- 2 shows a side view of a gripper which can be used according to the invention,
- Fig. 6
- a front view of a gripper designed as a pair of grippers with an internal suction member, and
- Fig. 7
- a front view of a gripper designed as a single gripper with external suction elements.
Fig. 1 zeigt eine Seitenansicht einer erfindungsgemäßen Vorrichtung mit
einem in Pfeilrichtung umlaufenden Transportrad 1, das entlang seines
Umfangs in äquidistanten Abständen mit Saugorganen 2 und Greifern 3
gekoppelt ist. Die Anzahl der mit dem Transportrad 1 gekoppelten Saugorgane
2 ist gleich der Anzahl der mit dem Transportrad 1 gekoppelten
Greifer 3. Saugorgane 2 und Greifer 3 sind entlang des Umfangs des
Transportrads 1 derart zueinander versetzt angeordnet, daß jeweils ein
Saugorgan 2 zwischen zwei Greifern 3 bzw. ein Greifer 3 zwischen zwei
Saugorganen 2 zu liegen kommt.Fig. 1 shows a side view of a device according to the invention
a
Die Saugorgane 2 besitzen jeweils eine Basis- bzw. Trägereinheit 4, welche
fest und starr mit dem Transportrad 1 gekoppelt ist. Ebenso besitzt jeder
Greifer 3 eine Basis- bzw. Trägereinheit 5, die fest und starr mit dem
Transportrad 1 gekoppelt ist.The
Basis- bzw. Trägereinheiten 4 und 5 der Saugorgane 2 und der Greifer 3
sind somit bezüglich des Transportrades 1 ortsfest angeordnet und führen
auch bei Rotation des Transportrades 1 keinerlei Relativbewegungen zueinander
aus.Base or
Die Saugorgane 2 besitzen jeweils einen Saugkopf 6, welcher um eine
Achse 7 schwenkbar an der Basis- bzw. Trägereinheit 4 des jeweiligen
Saugorgans 2 gelagert ist. Die Achse 7 erstreckt sich dabei wiederum
senkrecht zur Umlaufrichtung des Transportrades 1.The
Unterhalb des Transportrads 1 ist ein Erzeugnisstapel 8, insbesondere ein
Stapel von Druckereierzeugnissen 9 angeordnet, von dem mittels der in
Fig. 1 dargestellten Vorrichtung Erzeugnisse 9 einzeln von den Saugorganen
2 aufgenommen und an jeweils einen Greifer 3 übergeben werden. Below the
Dementsprechend erfolgt der Aufnahme- und Übergabeprozeß im unteren
Bereich des Transportrads 1. Die den Greifern 3 übergebenen Erzeugnisse
werden durch die Drehung des Transportrads 1 entgegen dem Uhrzeigersinn
auf einer kreisförmigen Umlaufbahn in den oberen Bereich des
Transportrads 1 gefördert, wobei die nicht von den Greifern 3 gehaltenen
Abschnitte der Erzeugnisse 9 aufgrund Schwerkrafteinwirkung frei nach
unten hängen.Accordingly, the admission and transfer process takes place in the lower one
Area of the
Die radiale, von der Drehachse 10 des Transportrades 1 weg gerichtete
Erstreckung der Saugorgane 2 ist etwas größer als die entsprechende radiale
Erstreckung der Greifer 3, so daß die erwähnten, nach unten hängenden
Abschnitte der Erzeugnisse 9 lediglich die Saugorgane 2 und nicht
die Greifer 3 berühren. So wird auf vorteilhafte Weise eine Beschädigung
der Erzeugnisse 9 durch die Greifer 3 vermieden.
Bei der in Fig. 1 dargestellten bevorzugten Ausführungsform der Erfindung
weisen die Saugorgane jeweils eine Führungsfläche 11 auf, an denen
die genannten Abschnitte der Erzeugnisse zur Anlage kommen können.
Diese Führungsflächen 11 könnten alternativ beispielsweise auch als
Führungsrollen ausgebildet sein. Die Führungsflächen 11 stützen die Erzeugnisse
9 im oberen Bereich des Transportrades von unten ab, wobei
bei der in Fig. 1 dargestellten Erzeugnislänge letztlich eine Abstützung eines
Erzeugnisses 9 durch zwei Führungsflächen 11 benachbarter Saugorgane
2 stattfindet.The radial extension of the
In the preferred embodiment of the invention shown in FIG. 1, the suction members each have a
Im oberen Bereich des Transportrades 1 ist ein gefedertes Andrückband
12 vorgesehen, welches dafür sorgt, daß die Erzeugnisse 9 gegen die Führungsflächen
11 der Saugorgane 2 gedrückt werden, so daß die Erzeugnisse
9 letztlich zwischen diesen Führungsflächen 11 und dem Andrückband
12 definiert geführt werden. Diese Führungsfunktion wird auch
noch dann ausgeführt, wenn die Greifer 3 bereits geöffnet sind und die
Erzeugnisse 9 freigegeben haben, was letztlich bedeutet, daß die Erzeugnisse
9 im oberen Bereich des Transportrades 1, in dem die Greifer 3 geöffnet
sind, ausschließlich von den Führungsflächen 11 und dem Andrückband
12 gehalten und geführt werden.In the upper area of the
Radial nach innen vom Andrückband 12 beabstandet verläuft ein gestrichelt,
lediglich schematisch angedeuteter Bändchenförderer 13, welcher
dafür sorgt, daß die vorlaufenden Endabschnitte der zwischen Führungsflächen
11 und Andrückband 12 gehaltenen Erzeugnisse 9 angehoben
und somit radial nach außen aus der Umlaufbahn des Transportrades 1
weggeführt werden, um auf diese Weise einem dem Transportrad 1 nachgeordneten
Förderband 14 zugeführt werden zu können.A dashed line runs radially inward from the
Die Fig. 2a bis d zeigen nochmals in Detailansicht die einzelnen Verfahrensschritte
zur Aufnahme und Übergabe der Erzeugnisse 9 mit einer Vorrichtung
gemäß Fig. 1.2a to d again show the individual method steps in a detailed view
for receiving and transferring the
Fig. 2a veranschaulicht, daß der Saugkopf 6 eines. Saugorgans 2 zur Aufnahme
eines Erzeugnisses 9 so gegenüber der Basis- bzw. Trägereinheit 4
verschwenkt wird, daß die Saugrichtung des Saugkopfes 6 im wesentlichen
senkrecht zur Erzeugnisoberfläche orientiert ist. Dabei wird der einen
Balgsauger aufweisende Saugkopf 6 so nahe an das aufzunehmende
Erzeugnis 9 herangeführt, daß ein Ansaugen des Erzeugnisses 9 stattfindet. Fig. 2a illustrates that the
Das angesaugte Erzeugnis 9 wird durch eine in Pfeilrichtung erfolgende
Rotation des Transportrades 1 sowie durch eine im Uhrzeigersinn erfolgende
Schwenkbewegung des Saugkopfes 6 gegenüber der Basis- bzw.
Trägereinheit 4 in zunehmendem Maße vom Erzeugnisstapel 8 abgehoben,
was aus den Fig. 2b und 2c ersichtlich ist. Dieser Abhebeprozeß verläuft
derart, daß das angesaugte Ende des Erzeugnisses 9 in den Aufnahmebereich
des dem Saugorgan 2 in Umlaufrichtung des Transportrades 1
nachgeordneten Greifers 3 gelangt (Fig. 2c).The sucked
In dieser Position kann dann ein Schließen des Greifers 3 sowie ein Abschalten
der Saugwirkung des Saugkopfes 6 erfolgen, was dazu führt, daß
das ursprünglich vom Saugkopf 6 aufgenommene Erzeugnis 9 dem Greifer
3 übergeben wurde und dementsprechend nur noch vom Greifer 3 gehalten
wird (Fig. 2d).In this position, the
Nach dieser Übergabe des Erzeugnisses 9 an den Greifer 3 verbleibt der
Saugkopf 6 im wesentlichen in seiner in Fig. 2d dargestellten Schwenkposition,
da in dieser Position die Führungsfläche 11 des Saugorgans 2 so
ausgerichtet ist, daß sie die vorstehend bereits erläuterte Funktion der
Abstützung von dem jeweiligen Saugorgan 2 vorlaufenden Erzeugnissen
übernehmen kann.After this transfer of the
Aus Fig. 1 ist ersichtlich, daß ein Zurückschwenken der Saugköpfe 6 in
ihre Aufnahmeposition erst wieder dann erfolgt, wenn die Erzeugnisse 9
durch den Bändchenförderer 13 von den Führungsflächen 11 abgehoben
wurden. From Fig. 1 it can be seen that a pivoting back of the suction heads 6 in
it will only take up its position again when the
Fig. 3 zeigt eine Seitenansicht einer zweiten Ausführungsform einer erfindungsgemäßen
Vorrichtung. Im Unterschied zu der Vorrichtung gemäß
Fig. 1 sind hier lediglich die Saugorgane 2 fest mit einem Transportrad 15
gekoppelt, während die Greifer 3 lösbar mit dem Transportrad 15 in Eingriff
bringbar sind. Alternativ wäre es auch möglich, zwei separate, nebeneinander
angeordnete Transporträder für Greifer 3 und Saugorgane 2
vorzusehen. Die Greifer 3 sind mit einem lediglich schematisch, strichpunktiert
angedeuteten Fördermittel 16 gekoppelt, welches dazu geeignet
ist, die Greifer 3 der unteren Hälfte der Umlaufbahn des Transportrads 15
zuzuführen (Pfeil A) und sie aus diesem Bereich auch wieder wegzuführen
(Pfeil B).Fig. 3 shows a side view of a second embodiment of an inventive
Contraption. In contrast to the device according to
1, only the
Zum Zweck der lösbaren Kopplung zwischen Greifern 3 und Transportrad
15 ist das Transportrad 15 an seinem Umfang mit äquidistant verteilten
Nuten 17 versehen, die zur Aufnahme der Schwenkachsen 18 der Greifer
3 dienen. Bezogen auf den Umfang des Transportrads 15 ist jeweils eine
Nut 17 in der Mitte zwischen zwei benachbarten Saugorganen 2 vorgesehen.
Die Schwenkachsen 18 der Greifer 3 sind mit dem Fördermittel 16
gekoppelt und bilden somit in diesem Ausführungsbeispiel die Basis- bzw.
Trägereinheiten der Greifer 3.For the purpose of releasable coupling between
Durch die in Fig. 3 gezeigte Vorrichtung wird sichergestellt, daß die Anordnung
von Saugorganen 2 und Greifern 3 im Aufnahme- und Übergabeabschnitt
des Transportrads 15 genau derjenigen Anordnung entspricht,
die bereits in bezug auf Fig. 1 erläutert wurde. Der funktionelle Ablauf des
Aufnahme- und Übergabeprozesses ist dementsprechend bei den beiden
Vorrichtungen gemäß den Fig. 1 und 3 gleich. Der wesentliche Unterschied
zwischen beiden Vorrichtungen besteht darin, daß die von den
Saugorganen 2 an die Greifer 3 übergebenen Erzeugnisse mit einer Vorrichtung
gemäß Fig. 3 aus dem Bereich des Transportrads 15 gemeinsam
mit den jeweils zugeordneten Greifern 3 weggefördert werden können, so
daß dementsprechend im Bereich des Transportrads 15 im Gegensatz zur
' Vorrichtung gemäß Fig. 1 nach dem Aufnehmen eines Erzeugnisses kein
Öffnen der Greifer 3 erfolgt.
Alternativ zu dem Ausführungsbeispiel gemäß Fig 3 ist es auch möglich,
das Fördermittel 16 in einem anderen Winkel als dem in Fig. 3 dargestellten
zum Transportrad 15 hin oder vom Transportrad 15 wegzuführen, so
daß letztlich die in Fig. 3 dargestellten Pfeile A und B nicht parallel zueinander
verlaufen müssen.The device shown in FIG. 3 ensures that the arrangement of
As an alternative to the exemplary embodiment according to FIG. 3, it is also possible to guide the conveying means 16 at an angle other than that shown in FIG. 3 towards or away from the
Fig. 4 veranschaulicht, daß sowohl die Vorrichtung gemäß Fig. 1 als auch
die Vorrichtung gemäß Fig. 3 nicht nur zur Aufnahme von gestapelten Erzeugnissen,
sondern auch zur Aufnahme von in Schuppenformation angelieferten
Erzeugnissen 9 dienen kann. Der Aufnahme- und Übergabeprozeß
verläuft hier im wesentlichen identisch, der einzige Unterschied besteht
darin, daß die Erzeugnisse selbst während des Aufnahme- und
Übergabeprozesses in Richtung des Pfeiles C gefördert werden.Fig. 4 illustrates that both the device of Fig. 1 and
3 not only for receiving stacked products,
but also to accommodate delivered in
Fig. 5 zeigt eine Seitenansicht eines erfindungsgemäß verwendbaren
Greifers 3. Dieser Greifer 3 besitzt eine Basis- bzw. Trägereinheit 5, welche
fest mit dem nur bereichsweise dargestellten Transportrad 1 gekoppelt ist.
Am radial äußeren Ende der Basis- und Trägereinheit 5 ist eine sich senkrecht
zur Umlaufrichtung des Transportrads 1 erstreckende Achse 18 vorgesehen,
um die zwei Schenkel 19, 20 des Greifers 3 schwenkbar gelagert
sind. Der in Umlaufrichtung des Transportrads 1 vorlaufende Schenkel 19
ist dabei aus starrem Material gefertigt, während der entsprechend nachlaufende
Schenkel 20 federnd ausgebildet ist, um so die Aufnahme verschieden
dicker Erzeugnisse 9 ohne wesentliche Änderungen in der Ansteuerung
der Greifer 3 zu ermöglichen.Fig. 5 shows a side view of a usable according to the
Beide Schenkel 19, 20 weisen an ihrem radial inneren Ende jeweils eine
Führungsrolle 21, 22 auf, die zumindest im Aufnahme- und Übergabebereich
des Transportrads 1 entlang nicht dargestellter Führungskulissen
laufen und somit die jeweils gewünschten Öffnungs- bzw. Schließbewegungen
des Greifers 3 bewirken.Both
Links und rechts des Greifers 3 ist in Fig. 5 jeweils eine Basis- bzw. Trägereinheit
4 für jeweils ein Saugorgan 2 angedeutet. Ebenso ist in Fig. 5 der
Verlauf des Bändchenförderers 13 (siehe Fig. 1) zu erkennen.To the left and right of the
Fig. 6 zeigt eine Frontalansicht eines als Greiferpaar ausgebildeten Greifers
3. Der Greifer 3 besteht dementsprechend aus zwei nebeneinander
angeordneten Greiferelementen 23, wobei jedes Greiferelement 23 jeweils
zwei Schenkel 19, 20 zum Greifen eines Erzeugnisses 9 besitzt. Die in
Umlaufrichtung des gemäß Fig. 6 doppelwandig ausgebildeten Transportrades
1 vorlaufenden Schenkel der beiden Greiferelemente 23 sind fest
miteinander gekoppelt, wobei ihre Bewegung von der gemeinsamen Führungsrolle
22 ausgelöst wird, die im Aufnahme- und Übergabebereich des
Transportrades 1 entlang einer nicht dargestellten Führungskulisse verläuft.
Entsprechendes gilt für die beiden in Umlaufrichtung des Transportrades
1 nachlaufenden Schenkel 20 der Greiferelemente 23, die
ebenfalls starr gekoppelt sind und von der Führungsrolle 21 beaufschlagt
werden. 6 shows a frontal view of a gripper designed as a pair of
In Fig. 6 ist gut zu erkennen, daß der Saugkopf 6 eines Saugorgans 2
mittig zwischen den beiden Greiferelementen 23 angeordnet ist, so daß
der Saugkopf 6 ein Erzeugnis 9 problemlos definiert und kontrolliert in
den Bereich der geöffneten Greiferschenkel bewegen kann, ohne daß
Saugkopf 6 und Greiferelemente 23 miteinander kollidieren.6 that the
Schließlich ist in Fig. 6 gezeigt, daß der Bändchenförderer 13 gemäß Fig. 1
in dieser Ausführungsform als Bändchenpaar ausgebildet werden kann,
wodurch erreicht wird, daß ein Abheben des Erzeugnisses 9 aus beiden
Greiferelementen 23 problemlos erfolgen kann.Finally, it is shown in FIG. 6 that the
Fig. 7 zeigt schematisch, daß alternativ zu der Ausführungsform gemäß
Fig. 6 auch lediglich ein Einzelgreifer 25 zum Einsatz gelangen kann, welcher
zwei Greiferschenkel 26 und 27 aufweist, zwischen welchen ein Erzeugnis
9 gehalten wird. In diesem Fall ist es von Vorteil, wenn links und
rechts neben dem Einzelgreifer 25 jeweils ein Saugorgan 28 angeordnet
wird, die die für den Aufnahme- und Übergabeprozeß nötigen Schwenkbewegungen
parallel und synchron zueinander ausführen. Bevorzugt ist
es dabei, wenn beide Saugorgane 28 mechanisch starr miteinander gekoppelt
werden. Ebenso wie die Bewegungen der Saugorgane 28 erfolgt die
Ansteuerung der Saugfunktion bei beiden Saugorganen 28 in zeitlich synchroner
Weise.Fig. 7 shows schematically that alternatively to the embodiment according to
6, only a
Durch die Vorsehung von zwei Saugorganen 28 wird bei Verwendung eines
Einzelgreifers 25 sichergestellt, daß ein Erzeugnis 9 zuverlässig in den
Aufnahmebereich des Einzelgreifers 25 überführt werden kann. By the provision of two
Die in Fig. 7 dargestellte Ausführungsform kann besonders vorteilhaft in
einer Anordnung gemäß Fig. 3 mit an einem Transportrad 15 umlaufenden
Saugorganen 2 und entlang eines Fördermittels 16 geförderten Greifern
3 eingesetzt werden.The embodiment shown in FIG. 7 can be particularly advantageous in
an arrangement according to FIG. 3 with rotating on a
Claims (13)
- Apparatus for transporting flexible, sheet-like products, in particular printed products (9), away and/or further, having a plurality of grippers (3; 25) which can be moved along a gripper-conveying route and follow one after the other in the transporting direction, each of which grippers has legs (19, 20; 26, 27), which can pivot relative to one another between an open position and a closed position, and having a plurality of suction elements (2) which can be moved along a suction-element-conveying route, are conveyed, in a receiving and transfer region, through a suction-element transporting wheel (1, 15) that can be driven in rotation and each have a suction head (6), which can be pivoted about a pivot spindle (7), which is connected to the suction-element-transporting wheel (1, 15) and runs with the latter, between a receiving position and a transfer position and which, in this receiving and transfer region, in each case in the receiving position, sucks up one end of a product (9), in the transfer position transfers the sucked-up end of this product (9) to an open gripper (3, 25), and, after this gripper (3: 25) has been closed, releases the sucked-up end, which is now retained by the gripper (3; 25), of the product (9), characterized in that a gripper-transporting wheel (1, 15), which can be driven in rotation and conveys the grippers (3; 25) in the receiving and transfer region, is provided, to which gripper-transporting wheel the grippers (3; 25), during transport, can be releasably coupled or are non-releasably coupled, and in that the path which is passed through by the pivot spindles (7) in the receiving and transfer region runs along or parallel to the gripper-conveying route.
- Apparatus according to Claim 1, characterized in that the length of that section of the path of the pivot spindles (7) which runs along or parallel to the gripper-conveying route is such that at least two successive grippers (3) are located in this section.
- Apparatus according to Claim 1 or 2, characterized in that, in the receiving and transfer region; the gripper-conveying route and the path of the pivot spindles (7) run on concentric circular paths.
- Apparatus according to one of Claims 1 to 3, characterized in that, in the receiving and transfer region, in each case one gripper (3) and one suction element (2) are assigned to one another.
- Apparatus according to one of Claims 1 to 4, characterized in that, in the receiving and transfer region, the distance between two successive grippers (3) corresponds to the distance between two successive suction elements (2).
- Apparatus according to one of Claims 1 to 5, characterized in that, in the receiving and transfer region, the suction-element-conveying route and the gripper-conveying route run centrally along, in particular centrally above, the products (9) which are to be received.
- Apparatus according to Claim 8, characterized in that the gripper-conveying route is formed by a conveying means (16) which runs along the transporting wheel (15) in certain sections and has grippers (3) coupled to it.
- Apparatus according to Claim 1 or 7, characterized in that the suction-element transporting wheel and gripper-transporting wheel are designed as a single, in particular double-walled transporting wheel (1, 15) for conveying both the suction elements (2) and the grippers (3).
- Apparatus according to one of Claims 1 to 8, characterized in that the suction elements have a guide means (11) which acts in the transfer position of said suction elements and is intended for guiding in a defined manner between the guide means (11) and a counter-pressure apparatus (12) a product (9) which is not retained by means of suction action.
- Apparatus according to Claim 9, characterized in that the counter-pressure apparatus is designed as a pressure-exerting belt (12).
- Apparatus according to one of Claims 1 to 5 and 7 to 10, characterized in that each gripper (3) assigned to a suction element (2) is designed as a gripper pair (23), it being the case that, in the receiving and transfer region, the suction element (2) is arranged between the two grippers of the respectively associated gripper pair (23).
- Apparatus according to one of Claims 1 to 5 and 7 to 10, characterized in that each suction element assigned to a gripper (25) is designed as a suction-element pair (28), it being the case that, in the receiving and transfer region, the gripper (25) is arranged between the two suction elements of the respectively associated suction-element pair (28).
- Apparatus according to one of Claims 1 to 12, characterized in that the gripper movements, the suction-element movements and the activation of the suction elements are controlled by control guides and/or toothed-belt gear mechanisms.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DK00110601T DK1055620T3 (en) | 1999-05-28 | 2000-05-18 | Device for removing and / or forwarding flexible, flat items |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CH99899 | 1999-05-28 | ||
| CH99899 | 1999-05-28 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1055620A1 EP1055620A1 (en) | 2000-11-29 |
| EP1055620B1 true EP1055620B1 (en) | 2004-11-03 |
Family
ID=4200074
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP00110601A Expired - Lifetime EP1055620B1 (en) | 1999-05-28 | 2000-05-18 | Device for picking up and/or transporting flexible and flat products |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US6554268B1 (en) |
| EP (1) | EP1055620B1 (en) |
| JP (1) | JP4921631B2 (en) |
| AT (1) | ATE281389T1 (en) |
| AU (1) | AU764208B2 (en) |
| CA (1) | CA2309239C (en) |
| DE (1) | DE50008473D1 (en) |
| DK (1) | DK1055620T3 (en) |
| ES (1) | ES2226648T3 (en) |
| RU (1) | RU2260554C2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2006310965B2 (en) * | 2005-11-01 | 2010-10-14 | Ferag Ag | Method of, and apparatus for, transferring sheet-like products from a stack of products to a conveying belt |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1086914B1 (en) * | 1999-09-24 | 2003-05-02 | Ferag AG | Device for transporting flexible and flat products |
| US6755412B1 (en) * | 2002-07-23 | 2004-06-29 | Charles Dwayne Glowner | High speed overlapping insert feeding assembly |
| ATE469084T1 (en) | 2002-09-12 | 2010-06-15 | Ferag Ag | METHOD AND DEVICE FOR PROCESSING AND SEPARATING A SCALE-LIKE FORMATION OF FLEXIBLE, FLAT OBJECTS |
| US7441764B2 (en) * | 2003-06-13 | 2008-10-28 | Mead Westvaco Packaging Systems, Llc | Feeder mechanism for a packaging machine |
| JP2007161354A (en) * | 2005-12-09 | 2007-06-28 | Dainippon Printing Co Ltd | Unpacking system and unpacking method |
| JP4704203B2 (en) * | 2005-12-09 | 2011-06-15 | 大日本印刷株式会社 | Packing apparatus and packing method |
| ES2598111T3 (en) * | 2006-06-30 | 2017-01-25 | Ferag Ag | Device for separating individual flat objects from a stack and for the progressive transport of separate objects |
| DE102008048287A1 (en) * | 2008-09-22 | 2010-03-25 | Heidelberger Druckmaschinen Ag | Apparatus and method for folding sheets |
| CH699859A2 (en) * | 2008-11-04 | 2010-05-14 | Ferag Ag | Device and method for promoting and deliver flat objects. |
| CH708427A1 (en) * | 2013-08-12 | 2015-02-13 | Ferag Ag | Device and method for separating product components of a multi-part product. |
| CH710449A1 (en) | 2014-12-08 | 2016-06-15 | Ferag Ag | Apparatus and method for conveying and transferring flat objects. |
| JP7395623B2 (en) | 2019-06-26 | 2023-12-11 | ユーグゥァン ヂョン | Omnidirectional skin care mask with variable shape |
| WO2021034306A1 (en) | 2019-08-16 | 2021-02-25 | Newspaper Solutions, LLC | Inserter hopper device |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE966622C (en) * | 1941-05-29 | 1957-08-29 | Heinrich Rohrbacher Fa | Sheet feeder with suction cups rotating around a common axis |
| US2827287A (en) * | 1954-03-01 | 1958-03-18 | Package Machinery Co | Blank feeder |
| US2853297A (en) * | 1954-04-22 | 1958-09-23 | Time Inc | Stream feeder device |
| GB1304924A (en) * | 1970-03-03 | 1973-01-31 | ||
| US4901996A (en) * | 1986-11-10 | 1990-02-20 | Am International Incorporated | Apparatus and method for feeding sheet material from a stack for a collating conveyor |
| EP0267365B1 (en) * | 1986-11-10 | 1991-05-08 | Am International Incorporated | Signature handling apparatus |
| US4813662A (en) * | 1988-01-29 | 1989-03-21 | Hall Processing Systems | High speed drum processing apparatus |
| CH676839A5 (en) | 1988-03-17 | 1991-03-15 | Grapha Holding Ag | |
| DE59403428D1 (en) * | 1993-05-21 | 1997-08-28 | Ferag Ag | Device for separating stacked printed products |
| DE59605979D1 (en) * | 1995-07-25 | 2000-11-16 | Ferag Ag | Device for supplying printed products to a finishing station |
-
2000
- 2000-05-18 DK DK00110601T patent/DK1055620T3/en active
- 2000-05-18 DE DE50008473T patent/DE50008473D1/en not_active Expired - Lifetime
- 2000-05-18 EP EP00110601A patent/EP1055620B1/en not_active Expired - Lifetime
- 2000-05-18 AT AT00110601T patent/ATE281389T1/en not_active IP Right Cessation
- 2000-05-18 ES ES00110601T patent/ES2226648T3/en not_active Expired - Lifetime
- 2000-05-22 AU AU36346/00A patent/AU764208B2/en not_active Ceased
- 2000-05-24 CA CA002309239A patent/CA2309239C/en not_active Expired - Lifetime
- 2000-05-26 RU RU2000113598/12A patent/RU2260554C2/en not_active IP Right Cessation
- 2000-05-26 JP JP2000161146A patent/JP4921631B2/en not_active Expired - Fee Related
- 2000-05-26 US US09/579,634 patent/US6554268B1/en not_active Expired - Lifetime
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2006310965B2 (en) * | 2005-11-01 | 2010-10-14 | Ferag Ag | Method of, and apparatus for, transferring sheet-like products from a stack of products to a conveying belt |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2260554C2 (en) | 2005-09-20 |
| DE50008473D1 (en) | 2004-12-09 |
| JP2000335760A (en) | 2000-12-05 |
| DK1055620T3 (en) | 2004-12-06 |
| ES2226648T3 (en) | 2005-04-01 |
| AU3634600A (en) | 2000-11-30 |
| AU764208B2 (en) | 2003-08-14 |
| US6554268B1 (en) | 2003-04-29 |
| EP1055620A1 (en) | 2000-11-29 |
| CA2309239C (en) | 2007-07-17 |
| ATE281389T1 (en) | 2004-11-15 |
| JP4921631B2 (en) | 2012-04-25 |
| CA2309239A1 (en) | 2000-11-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1055620B1 (en) | Device for picking up and/or transporting flexible and flat products | |
| DE3041723C2 (en) | Method and device for conveying stacks of web-shaped units | |
| DE69720125T2 (en) | Transport unit for products | |
| CH629156A5 (en) | CONVEYOR DEVICE. | |
| DE19523164A1 (en) | Flexible transporting system for newspapers or magazines | |
| DE3145491C2 (en) | ||
| CH667620A5 (en) | METHOD AND DEVICE FOR COLLECTING FOLDED PRINTED SHEETS. | |
| EP0606550B1 (en) | Device for bringing flat products to a processing device for printed products | |
| EP3339222B1 (en) | Conveying device for cans | |
| EP0510525B1 (en) | Method and device for handling printed products | |
| DE2058606C3 (en) | Device for the continuous conveying and alignment of separated sheets | |
| AT391821B (en) | DEVICE FOR PRODUCING SPACER FRAME FOR INSULATING GLASS | |
| DE102008018224A1 (en) | Method and device for transferring small-sized, in particular provided with a stem products to a longitudinal conveyor | |
| EP0242702B1 (en) | Method and device for turning continually arriving flat products | |
| EP0210494B1 (en) | Collecting device for folded printed sheets | |
| EP1042206A1 (en) | Device for receiving and/or conveying flat products | |
| EP0514783B1 (en) | Device for the transport of stacks of paper sheets | |
| EP0478911A1 (en) | Device for the selective transfer of overlapping articles from a first conveyor to a second conveyor | |
| EP3851281B1 (en) | Device for handling printing plates on a printing machine | |
| EP0647582A1 (en) | Device for opening and further conveying printed products | |
| EP0371276B1 (en) | Device for piling flat items | |
| DE19736822A1 (en) | Device for gathering of signatures | |
| DE2915689A1 (en) | Ancillary conveyors for locating successive moving panels - of tubular film for positional integration of film cutting and bag making mechanisms | |
| EP0827930A1 (en) | Device and method for feeding flat printed products | |
| EP2418164B1 (en) | Method and device for gathering flat products with other flat products and device for conveying flat products, in particular printed products |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 20001213 |
|
| AKX | Designation fees paid |
Free format text: AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| 17Q | First examination report despatched |
Effective date: 20020816 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20041103 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20041103 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: PATENTANWAELTE SCHAAD, BALASS, MENZL & PARTNER AG Ref country code: CH Ref legal event code: EP |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) | ||
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 |
|
| REF | Corresponds to: |
Ref document number: 50008473 Country of ref document: DE Date of ref document: 20041209 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: GERMAN |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20050203 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2226648 Country of ref document: ES Kind code of ref document: T3 |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20050518 Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050518 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050518 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050531 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050531 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20050804 |
|
| ET | Fr: translation filed | ||
| BERE | Be: lapsed |
Owner name: FERAG AG Effective date: 20050531 |
|
| BERE | Be: lapsed |
Owner name: *FERAG A.G. Effective date: 20050531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050403 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 17 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FI Payment date: 20160511 Year of fee payment: 17 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DK Payment date: 20160519 Year of fee payment: 17 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 18 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 50008473 Country of ref document: DE Representative=s name: KLUNKER IP PATENTANWAELTE PARTG MBB, DE |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: EBP Effective date: 20170531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170518 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170531 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 19 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20180522 Year of fee payment: 19 Ref country code: ES Payment date: 20180625 Year of fee payment: 19 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20180522 Year of fee payment: 19 Ref country code: IT Payment date: 20180530 Year of fee payment: 19 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20180518 Year of fee payment: 19 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20180518 Year of fee payment: 19 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20180802 Year of fee payment: 19 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 50008473 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20190518 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190531 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190531 Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190519 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190518 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190518 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191203 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190531 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20200928 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190519 |