EP1032534B1 - A device for picking up and manipulating sheet-like, flexible objects, particularly expensive fabrics - Google Patents
A device for picking up and manipulating sheet-like, flexible objects, particularly expensive fabrics Download PDFInfo
- Publication number
- EP1032534B1 EP1032534B1 EP98932511A EP98932511A EP1032534B1 EP 1032534 B1 EP1032534 B1 EP 1032534B1 EP 98932511 A EP98932511 A EP 98932511A EP 98932511 A EP98932511 A EP 98932511A EP 1032534 B1 EP1032534 B1 EP 1032534B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- jaw
- gripping member
- gripping
- gripper
- lifting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H5/00—Feeding articles separated from piles; Feeding articles to machines
- B65H5/08—Feeding articles separated from piles; Feeding articles to machines by grippers, e.g. suction grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H3/00—Separating articles from piles
- B65H3/08—Separating articles from piles using pneumatic force
- B65H3/0808—Suction grippers
- B65H3/0816—Suction grippers separating from the top of pile
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H5/00—Feeding articles separated from piles; Feeding articles to machines
- B65H5/08—Feeding articles separated from piles; Feeding articles to machines by grippers, e.g. suction grippers
- B65H5/14—Details of grippers; Actuating-mechanisms therefor
Definitions
- the subject of the present invention is a device for picking up and manipulating sheet-like, flexible objects, particularly expensive fabrics, according to the preamble to Claim 1.
- the invention also relates to a method of picking up and manipulating sheet-like flexible objects utilizing the above-mentioned device.
- a device including the above-mentioned characteristics is known from published Japanese patent applications Nos. 61101351 and 61101343 in the name of Tokyo luki Ind. Co. Ltd.
- gripping devices each comprising a first pneumatic suction gripping member which can adhere by contact to a face of an edge portion of fabric to be manipulated and a second gripping member which can press the fabric against the first gripping member and keep it pressed in a firmly gripped condition by acting on the opposite face of the edge portion .
- the gripping device requires at least two independent actuators, of which one is subjected to two distinct operations, and the gripping device enables gripping to take place exclusively in peripheral regions of the piece of fabric and is not suitable for gripping in central regions of the piece. For this reason, it also takes up working space which may invade the space outside the piece to be manipulated.
- the devices do not have any means which render them suitable for handling particularly delicate and expensive materials such as cashmere, silk and any materials which are liable to retain impression marks.
- a device for picking up and manipulating plastics sheets is described in published European patent application No. 0111739. Since the manipulation of materials impermeable to air is involved, this device makes use of separate first and second gripping members of which the first gripping member is a pneumatic suction device and the second gripping member is a pincer device. The operation of the separate gripping members described cannot be proposed for the manipulation of fabrics, particularly for picking up and manipulating pieces which are highly permeable to air, especially if they are disposed between off-cuts.
- the problem upon which the present invention is based is that of providing a novel picking-up and manipulation device which is also capable of handling, with a firm but light grip, materials which may be quite difficult to pick up and manipulate, particularly expensive fabrics and cut portions thereof, at the same time preventing the problems complained of with reference to the acknowledged prior art.
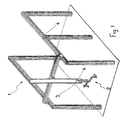
- an apparatus for manipulating flexible objects is generally indicated 1 and utilizes a picking-up device 2 disposed on a vertical slide 3 of a Cartesian robot 4 which, with regard to the aspects not expressly described, is of conventional type.
- the picking-up device 2 comprises a cross member 3a ( Figure 3) mounted on the slide 3 by means of a mechanical wrist 6 which can bring about angular orientations of the cross member about three (or more) axes X, Y, Z.
- the mechanical wrist is also of a type known to experts in the art.
- a motor 8 controls the movement of two further slides 10a, 10b, by means of a geared transmission 11.
- the further slides 10a, 10b are driven by means of screws with recirculating balls or other equivalent mechanisms, also of conventional type, and serve to translate two grippers, both indicated 12 and each mounted on a respective slide 10a, 10b, away from and towards a central position beside the geared transmission 11.
- Each gripper 12 comprises a first gripping member 13 and a second gripping member 14 combined in the following manner.
- the second gripping member is formed as a pincer with a first, fixed jaw 15 and a second jaw 16 which is movable in accordance with a law of motion defined by an articulated parallelogram mechanism in which the first jaw is fixed to a fixed bar 18 of the parallelogram whereas the second jaw is fixed to a connecting rod 19 thereof.
- the fixed bar 18 and the connecting rod 19 are connected to one another by means of first and second rocker arms 20, 21, the rocker arm 20 being pivoted relative to the fixed bar 18 by a pneumatic jack 22.
- the second jaw 16 is covered by a resilient pad 25 and, in the embodiment illustrated, has a substantially square shape in plan.
- the first jaw 15 comprises a fork-shaped support 27 between prongs 27a, 27b and a base 28 of which an approximately square aperture 29 is formed and houses the first gripping member 13, preferably in a releasable, replaceable manner.
- the first gripping member 13 is, interchangeably, a pneumatic suction device 30 or a mechanical gripping device 33, for example, with needles, with an adhesive surface, or covered with hooks such as those typically present in pull fastenings of the type known by the registered trade mark VELCRO (TM).
- the pneumatic suction device 30 has appendages 30a, by means of which it is housed and guided between the prongs 27a, 27b, and a perforated suction surface 30b communicating with a manifold 30c connected to an air-suction hose.
- the mechanical gripping device 33 is preferably movable away from and towards the aperture 29, by means of a jack actuator 32, between an operative position in which the active surface of the device 33 is at the level of the lower surfaces of the prongs 27a, 27b and a detachment position of the device 33 in which it is moved away from the prongs 27a, 27b which act as reaction members to favour the detachment of the fabric gripped from the above-mentioned active surface when the movable jaw 16 is closed onto the fixed jaw 15.
- a photocell or other similar presence detector is mounted on the first jaw 15 to detect the gripping between the jaws 15, 16 of the piece to be manipulated.
- a piece of a garment cut to the desired shape on a cutting table is indicated 50.
- the piece 50 is to be removed from a fabric off-cut, indicated 51, if possible without moving the off-cut so that other cut pieces lying on the cutting table can be identified and found by the picking-up device of the invention solely with reference to their positions relative to an origin point stored by the cutting apparatus.
- the picking-up device 2 is driven in a manner such that each gripper 12 is disposed above the piece to be gripped with the perforated surface of the pneumatic suction device 30 substantially parallel to the plane of the cutting table.
- the cross member 3a is then lowered until the pneumatic suction devices 30 contact the piece to be picked up.
- the piece adheres to the perforated active surface of the suction device 30 with the desired lightness of contact and is lifted, together with the cross member 3a.
- the lifting of the cross member 3a is coordinated with a rotary movement of the mechanical wrist 6 in the direction shown by way of example in Figure 11, that is, about an axis substantially parallel to the plane of closure of the second gripping member (the mutually facing surfaces of the jaws 15, 16) so as to orient the closure plane in a manner consistent with the deformation of the piece gripped due to its own weight and to its mechanical characteristics during its lifting.
- These second gripping members are operated at the moment at which the lifting permits the closure movement of the jaws 15, 16.
- the geometry selected for the articulated parallelogram mechanism permits a notably small travel of the movable jaw 16 in the direction perpendicular to the plane of the first fixed jaw 15, enabling the jaws to be closed after a very limited lifting of the piece.
- the jack 22 moves the rocker arm 20 so that the second jaw 16 is closed onto the first jaw 15.
- the second jaw has a relatively extensive active surface so as not to damage the fabric being handled.
- the surface of the first jaw is also extensive, particularly if it is supplemented by the surface of the first gripper, so that even the most delicate fabrics can be manipulated with complete safety and with relatively low closure pressures between the jaws.
- the mechanical gripping device 33 continues the desired movement by means of the jack 32, possibly with the subjection of the mechanical wrist 6 to a rotary-translational movement resulting in a rotary-translational movement of the two grippers 12, favouring the spontaneous detachment of the piece 50 from the offcut 51 without causing undesired displacements thereof.
- the cut piece is advantageously detached from the production off-cut vertically, cancelling out the effect of entrainment of the piece and of the off-cut, which may assume a certain importance according to the material and the geometry of the cut piece.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Sheets, Magazines, And Separation Thereof (AREA)
- Feeding Of Articles By Means Other Than Belts Or Rollers (AREA)
- Nonwoven Fabrics (AREA)
- Absorbent Articles And Supports Therefor (AREA)
- Auxiliary Devices For And Details Of Packaging Control (AREA)
- Control And Other Processes For Unpacking Of Materials (AREA)
Abstract
Description
- the first gripping member is required, before the intervention of the second gripping member, to lift only the edge of the piece gripped (that is, a minimal mass), every subsequent lifting effect being supported entirely by the second gripping member,
- the picking-up device is adaptable to various materials and different geometries by virtue of the interchangeability of the first gripping members and of the wide adaptability of the second gripping members,
- the movements of the device, in comparison with known devices with articulated arms, are compact and simple,
- control and coordination of the picking-up device is facilitated because the movements of several grippers mounted on the same cross-member can be coordinated,
- it is possible to pick up both large pieces with the use of several grippers spaced apart on the cross-member, and small pieces with the use even of a single device, or by moving the devices towards one another along the cross-member,
- it is possible simultaneously to pick up two or more pieces arranged symmetrically with respect to a line,
- the speed of closure of the jaws is increased and a minimum number of actuators is required for the operation of the gripper,
- a reliable grip is effected by virtue of the purely mechanical second gripping stage,
- a reliable grip is effected in the first gripping stage by virtue of the rotary-translational movement imparted to the picking-up device,
- it is possible to grip pieces even in their central regions, folding them into two portions one on top of the other.
Claims (13)
- A device for picking up and manipulating sheet-like, flexible objects, particularly expensive fabrics, including at least one gripper (12) comprising a first gripping member (13) which can adhere by contact to a face of the object to be picked up and a second gripping member (14) which can press the object gripped against the first gripping member (13) and keep it pressed in a firmly gripped condition by acting on the opposite face of the object to be picked up, characterized in that the second gripping member (14) is formed as a pincer with a first jaw (15) carrying the first gripping member and a second jaw (16) movable away from and towards the first jaw (15).
- A device according to Claim 1 in which the second jaw (16) is associated with an actuator which can implement a predefined relative motion between the jaws (15, 16) comprising a translational movement and simultaneous progressive closure of the second jaw (16) onto the first (15), the jaws being kept substantially parallel to one another.
- A device according to Claim 1 or Claim 2, in which the actuator comprises an articulated parallelogram mechanism, the first jaw (15) being stationary relative to a fixed bar (18) of the parallelogram and the second jaw (16) being mounted on a connecting rod (19) of the parallelogram.
- A device according to one or more of the preceding claims, in which the at least one gripper (12) is guided on a cross-member (3a) so as to be translatable and adjustable along the cross-member, and translational drive means (8, 11) are provided for moving the at least one gripper (12) along the cross-member (3a).
- A device according to Claim 4, in which two or more grippers (12) are provided on the same cross-member (3a).
- A device according to one or more of the preceding claims, in which the at least one gripper (12) is mounted on a mechanical wrist (6) articulated about a first axis substantially parallel to the plane of closure of the jaws (15, 16), the wrist being driven for rotation about the said axis so as to orient the closure plane in a manner consistent with the deformation of the object gripped due to the object's own weight, during the lifting thereof.
- A device according to one or more of the preceding claims, in which the first jaw (15) comprises an aperture (29) through which the first gripping member (13) acts.
- A device according to Claim 7, in which the first jaw (15) comprises a fork-like element (27), between prongs (27a, 27b) of which the aperture (29) is defined.
- A device according to Claim 7 or Claim 8, in which the first gripping member (13) is selected from a pneumatic suction device (30) and a mechanical gripping device (33), for example, with needles, with an adhesive surface, or the like.
- A device according to Claim 9, in which the first gripping member (13) is associated releasably with the first jaw (15) and is, interchangeably, the mechanical gripping device (33) and the pneumatic suction member (30).
- A device according to one or more of Claims 8 to 10, in which respective active surfaces of the first jaw, against which the second jaw is urged upon closure, are defined on at least one prong (27a, 27b) and a base of the fork-like element.
- A method of picking up and manipulating sheet-like, flexible objects, particularly expensive fabrics, including the steps of causing a first gripping member (13) of at least one gripper (12) to adhere by contact to a face of the object to be gripped, lifting the object by means of the first gripping member and subsequently pressing the object gripped against the first gripping member (13) and keeping the object pressed in a firmly gripped condition by acting on the opposite face of the object to be picked up, characterized in that the lifting by means of the first gripping member (13) is limited purely to an edge of the object to be picked up, the remaining lifting and/or manipulation of the object being effected by the operation of a second gripping member (14).
- A method according to Claim 12, in which the at least one gripper (12) is mounted on a mechanical wrist (6) articulated about an axis substantially parallel to the plane of closure of the jaws (15, 16) of the second gripping member (14), characterized in that, during the lifting at least of the edge of the object to be picked up, the wrist (6) is rotated about the axis so as to orient the closure plane in a manner consistent with the deformation of the object gripped due to its own weight and/or to the mechanical characteristics of the object, during the lifting thereof.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ITGE970089 | 1997-10-31 | ||
| IT97GE000089A IT1297700B1 (en) | 1997-10-31 | 1997-10-31 | FLEXIBLE OBJECT TAKING DEVICE. |
| PCT/IT1998/000197 WO1999023021A1 (en) | 1997-10-31 | 1998-07-15 | A device for picking up and manipulating sheet-like, flexible objects, particularly expensive fabrics |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1032534A1 EP1032534A1 (en) | 2000-09-06 |
| EP1032534B1 true EP1032534B1 (en) | 2001-12-19 |
Family
ID=11355076
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP98932511A Expired - Lifetime EP1032534B1 (en) | 1997-10-31 | 1998-07-15 | A device for picking up and manipulating sheet-like, flexible objects, particularly expensive fabrics |
Country Status (9)
| Country | Link |
|---|---|
| EP (1) | EP1032534B1 (en) |
| JP (1) | JP2001521868A (en) |
| CN (1) | CN1092596C (en) |
| AT (1) | ATE211110T1 (en) |
| AU (1) | AU8241398A (en) |
| DE (2) | DE69803095T2 (en) |
| ES (1) | ES2152194T3 (en) |
| IT (1) | IT1297700B1 (en) |
| WO (1) | WO1999023021A1 (en) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IT1308892B1 (en) * | 1999-05-07 | 2002-01-11 | Tai Tecnologia Automazione Inn | EQUIPMENT AND PROCEDURE FOR LEAVING A STACK OF LEAVES FOR LAMINATED GLASS. |
| US6439370B1 (en) * | 1999-10-05 | 2002-08-27 | M&R Printing Equipment, Inc. | Method and apparatus for the automatic loading of an article onto a printing machine |
| ES2368983B1 (en) * | 2010-02-15 | 2012-08-08 | Trabajos Catastrales, S.A. | AUTOMATIC FEEDER FOR SCANNER. |
| DE102015200503A1 (en) * | 2015-01-15 | 2016-07-21 | Bayerische Motoren Werke Aktiengesellschaft | Gripping device and method for handling a fiber mat |
| CN105113146B (en) * | 2015-09-02 | 2016-09-28 | 宁波舒普机电股份有限公司 | A kind of mechanical arm for capturing sewing |
| CN105110043B (en) * | 2015-10-14 | 2017-11-03 | 广东溢达纺织有限公司 | Sewing piece separating mechanism |
| CN105196163B (en) * | 2015-10-20 | 2018-04-10 | 上海方格自动化系统有限公司 | Wiper joint fixture integrated |
| EP3378579B1 (en) * | 2017-03-24 | 2023-07-05 | All4One S.R.L. | Gripping device, and apparatus for loading/unloading slab materials comprising said device |
| CN106865305B (en) * | 2017-04-27 | 2019-02-15 | 无锡百立德自动化有限公司 | High frequency start-stop trailer system |
| SE1751548A1 (en) * | 2017-12-14 | 2019-06-15 | Tomologic Ab | A method and a system for handling beam-cut parts |
| CN108482774B (en) * | 2018-03-28 | 2021-05-18 | 泉州市创达机械制造有限公司 | Automatic stacking device for wet tissues |
| DE102018112307A1 (en) | 2018-05-23 | 2019-11-28 | Olbrich Gmbh | Gripper assembly for lifting a semi-rigid semifinished product from a pad and a corresponding method |
| IT201900002695A1 (en) * | 2019-02-26 | 2020-08-26 | Ima Spa | ROBOTIZED HANDLING ASSEMBLY. |
| CN110589596B (en) * | 2019-08-28 | 2024-04-30 | 广东溢达纺织有限公司 | Cut-part folding equipment, material taking device thereof and cut-part folding method |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE443531B (en) * | 1978-11-27 | 1986-03-03 | Asea Ab | INDUSTRIAL ROBOT EQUIPMENT |
| JPS61101343A (en) * | 1984-10-24 | 1986-05-20 | Tokyo Juki Ind Co Ltd | Method and apparatus for conveying stretched cloth |
| US5284334A (en) * | 1992-04-01 | 1994-02-08 | Minolta Camera Kabushiki Kaisha | Sheet feeding device |
| EP0659666B1 (en) * | 1993-12-21 | 1998-12-02 | Central Glass Company, Limited | Method and apparatus for manipulating film |
-
1997
- 1997-10-31 IT IT97GE000089A patent/IT1297700B1/en active IP Right Grant
-
1998
- 1998-07-15 AT AT98932511T patent/ATE211110T1/en not_active IP Right Cessation
- 1998-07-15 WO PCT/IT1998/000197 patent/WO1999023021A1/en active IP Right Grant
- 1998-07-15 CN CN98810860A patent/CN1092596C/en not_active Expired - Fee Related
- 1998-07-15 JP JP2000518905A patent/JP2001521868A/en active Pending
- 1998-07-15 ES ES98932511T patent/ES2152194T3/en not_active Expired - Lifetime
- 1998-07-15 AU AU82413/98A patent/AU8241398A/en not_active Abandoned
- 1998-07-15 DE DE69803095T patent/DE69803095T2/en not_active Expired - Fee Related
- 1998-07-15 EP EP98932511A patent/EP1032534B1/en not_active Expired - Lifetime
- 1998-07-15 DE DE1032534T patent/DE1032534T1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| ES2152194T1 (en) | 2001-02-01 |
| DE69803095D1 (en) | 2002-01-31 |
| JP2001521868A (en) | 2001-11-13 |
| CN1092596C (en) | 2002-10-16 |
| EP1032534A1 (en) | 2000-09-06 |
| IT1297700B1 (en) | 1999-12-20 |
| CN1278230A (en) | 2000-12-27 |
| ITGE970089A1 (en) | 1999-05-01 |
| WO1999023021A1 (en) | 1999-05-14 |
| ITGE970089A0 (en) | 1997-10-31 |
| AU8241398A (en) | 1999-05-24 |
| ATE211110T1 (en) | 2002-01-15 |
| DE69803095T2 (en) | 2002-08-14 |
| DE1032534T1 (en) | 2001-05-23 |
| ES2152194T3 (en) | 2002-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1032534B1 (en) | A device for picking up and manipulating sheet-like, flexible objects, particularly expensive fabrics | |
| US4197772A (en) | Automatic feeding apparatus for punch press | |
| JP2004025326A (en) | Grasping device and transfer machine | |
| CN113604953B (en) | Method for automatically finishing fabric based on flat knitting machine | |
| EP0574501B1 (en) | Crotch overlocking and seaming apparatus | |
| US5465951A (en) | Fabric piece handling system | |
| CN109968403B (en) | Device and method for automatically replacing end effector by mechanical arm | |
| JPH0666982U (en) | Plate material gripping device | |
| EP0294450B1 (en) | Improvements in or relating to the handling of limp fabric | |
| US5806845A (en) | Fabric piece handling system | |
| CN210146832U (en) | Product taking and placing device of stamping robot | |
| JPH07187419A (en) | Transfer method and device of film | |
| Karakerezis et al. | A gripper for handling flat non-rigid materials | |
| JPH09388U (en) | Plate material gripping device | |
| US5431382A (en) | Fabric panel feed system | |
| CN214298194U (en) | Automatic treatment equipment for release film | |
| CN211807258U (en) | Material placing device for POSS machine keys | |
| CN217675735U (en) | Cloth transfer device and robot equipment | |
| CN220097795U (en) | HP-RTM automatic pickup and feeding device | |
| JPH0226593A (en) | Method and apparatus for joining twoflexible flexible layer-shaped bodies, namely, pairs of back panels and front panels two per set for product such as t shirt in textile and knitwork industry | |
| CN214924516U (en) | Combined stamping mechanical arm | |
| JPH062635Y2 (en) | Label sewing machine | |
| CN215046846U (en) | Stacking and unstacking mechanical arm convenient for replacing gripper | |
| EP0054032B1 (en) | Scrap removal apparatus | |
| JP2560099Y2 (en) | Press lifter device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20000411 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| EL | Fr: translation of claims filed | ||
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: BA2A Ref document number: 2152194 Country of ref document: ES Kind code of ref document: T1 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| DET | De: translation of patent claims | ||
| 17Q | First examination report despatched |
Effective date: 20010417 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20011219 Ref country code: LI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20011219 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20011219 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20011219 Ref country code: CH Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20011219 Ref country code: BE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20011219 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20011219 |
|
| REF | Corresponds to: |
Ref document number: 211110 Country of ref document: AT Date of ref document: 20020115 Kind code of ref document: T |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REF | Corresponds to: |
Ref document number: 69803095 Country of ref document: DE Date of ref document: 20020131 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20020319 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20020319 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20020319 |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20020603 Year of fee payment: 5 |
|
| ET | Fr: translation filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20020619 Year of fee payment: 5 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20020715 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20020715 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20020715 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20020731 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20020731 Year of fee payment: 5 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2152194 Country of ref document: ES Kind code of ref document: T3 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20030201 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20020715 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20030716 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20040203 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20040331 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20030716 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20050715 |
|
| REG | Reference to a national code |
Ref country code: HK Ref legal event code: WD Ref document number: 1031217 Country of ref document: HK |