L'invention concerne un dispositif motorisé
perfectionné pour l'ouverture d'une serrure de véhicule
automobile.
L'invention concerne plus particulièrement un
dispositif motorisé d'ouverture d'une serrure de véhicule
automobile, du type comportant un organe de commande qui peut
être amené par un utilisateur d'une position de repos à une
position d'ouverture dans laquelle il commande l'alimentation
d'un moteur électrique qui entraíne une tringlerie selon un
cycle d'ouverture de la serrure.
Dans un tel dispositif, il n'y a plus de liaison
mécanique directe entre l'organe de commande, qui seul est
accessible à l'utilisateur depuis l'extérieur du véhicule, et la
serrure proprement dite qui maintient en position fermée un
ouvrant du véhicule.
Par ailleurs, cette absence de liaison directe permet
de se dispenser des systèmes de verrouillage classiques faisant
par exemple appel à des verrous rotatifs à barillet. En effet,
il est possible de soumettre la mise en marche du moteur,
lorsque l'utilisateur manipule l'organe de commande, à la
condition qu'une information de déverrouillage ait été
précédemment transmise, par exemple par liaison radiofréquence,
infrarouge ou ultrasonore, à une centrale antivol du véhicule.
L'utilisateur est alors muni d'un badge, d'un transpondeur ou
d'une télécommande grâce à laquelle il peut déterminer un état
verrouillé ou déverrouillé du dispositif d'ouverture de la
serrure.
Cependant, les dispositifs motorisés d'ouverture connus
jusqu'à présent nécessitent la présence d'un circuit électronique
de commande du moteur électrique relativement complexe. En
effet, il faut habituellement détecter la position de l'organe
de commande, gérer le démarrage du moteur, détecter une position
d'ouverture de la tringlerie dans laquelle la serrure a libéré
l'ouvrant, inverser le sens de rotation du moteur électrique
pour ramener la serrure dans un état de fermeture et dètecter
l'arrivée de la tringlerie dans cet état.
Le circuit électronique de commande doit donc utiliser
des capteurs de fin de course agencés judicieusement dans le
dispositif et comporter des moyens de temporisation et
d'inversion du sens du courant d'alimentation du moteur
électrique.
L'invention a donc pour objet de proposer un dispositif
motorisé d'ouverture qui permet notamment de simplifier au
maximum le circuit électronique de commande du véhicule.
Dans ce but, l'invention propose un dispositif motorisé
d'ouverture d'une serrure de véhicule automobile, du type
comportant un organe de commande qui peut être amené par un
utilisateur d'une position de repos à une position d'ouverture
dans laquelle il commande l'alimentation d'un moteur électrique
qui entraíne une tringlerie selon un cycle d'ouverture de la
serrure, le dispositif d'ouverture comportant un actionneur qui
est mobile entre une position d'alimentation, dans laquelle le
moteur est alimenté électriquement, et une position de coupure
dans laquelle l'alimentation du moteur est coupée, l'actionneur
étant amené de sa position de coupure à sa position
d'alimentation par l'organe de commande lorsque ce dernier est
amené par l'utilisateur de sa position de repos à sa position
d'ouverture et, en fin de cycle d'ouverture de la serrure, la
tringlerie ramène l'actionneur vers sa position de coupure,
caractérisé en ce que l'actionneur est porté par l'organe de
commande sur lequel il est mobile entre une position relative
avancée, qu'il occupe lorsque l'actionneur et l'organe de
commande sont simultanément dans leur position respectivement de
coupure et de repos ou simultanément dans leur position
d'alimentation et d'ouverture, et une position relative reculée
qu'il occupe lorsque l'organe de commande est en position
d'ouverture et que l'actionneur est ramené en position de
coupure.
Selon d'autres caractéristiques de l'invention :
- le dispositif comporte des moyens élastiques
bistables qui sollicitent l'actionneur vers l'une ou l'autre de
ses positions relatives par rapport à l'organe de commande ;
- au cours d'un cycle d'ouverture de la serrure,
l'actionneur est immobilisé en position d'alimentation par la
tringlerie ;
- au cours d'un cycle d'ouverture de la serrure,
l'organe de commande est immobilisé en position d'ouverture par
l'actionneur ;
- en position de repos, l'actionneur immobilise la
tringlerie dans une position de fermeture ;
- la tringlerie comporte une roue qui est entraínée en
rotation autour de son axe par le moteur électrique, et la roue
comporte une came qui commande un cycle d'ouverture de la
serrure au cours d'une rotation de la roue ;
- la came commande un levier de renvoi qui est articulé
autour d'un axe sensiblement parallèle à l'axe de rotation de la
roue ;
- l'actionneur se déplace selon une trajectoire
sensiblement parallèle à l'axe de la roue, d'arrière en avant de
sa position de coupure à sa position d'alimentation ;
- l'actionneur comporte un bras transversal avant qui
coopère avec une surface de butée axiale aménagée sur une face
avant de la roue pour retenir l'actionneur en position
d'alimentation lors d'un cycle d'ouverture de la serrure, et le
bras transversal avant est reçu entre deux surfaces de butée
angulaire lorsque la tringlerie est en position de fermeture de
la serrure et que l'actionneur est en position de coupure ;
- l'actionneur comporte un bras transversal arrière, et
la roue comporte, sur une face transversale arrière, une rampe
de commande qui coopère avec le bras transversal arrière de
l'actionneur pour ramener ce dernier en position de coupure
lorsque la roue arrive dans une position de fermeture de la
serrure ;
- l'organe de commande est un poussoir qui coulisse
parallèlement à l'axe de la roue, d'arrière en avant de sa
position de repos à sa position d'ouverture, et l'actionneur est
monté coulissant sur le poussoir entre ses positions de coupure
et d'alimentation ;
- le poussoir est sollicité élastiquement vers sa
position de repos et, lorsque le bras transversal avant de
l'actionneur coopère avec la surface de retenue axiale de la
roue, l'actionneur retient l'organe de commande en position
d'ouverture.
D'autres caractéristiques et avantages de l'invention
apparaítront à la lecture de la description détaillée qui suit
pour la compréhension de laquelle on se reportera aux dessins
annexés dans lesquels :
- la figure 1 est une vue en perspective éclatée des
principaux éléments constitutifs d'un dispositif motorisé
d'ouverture d'une serrure conforme aux enseignements de
l'invention ;
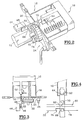
- les figures 2, 3 et 4 sont des vues partielles
illustrant le dispositif motorisé de la figure 1 dans un état de
repos, respectivement en perspective avec arrachement, en coupe
longitudinale partielle et, de manière schématique, en vue de
côté afin d'illustrer plus particulièrement la position relative
de l'actionneur par rapport aux faces avant et arrière de la
roue qui est représentée ici de manière schématique en
développé ;
- les figures 5, 6 et 7 sont des vues similaires à
celles des figures 2, 3 et 4 dans lesquelles le poussoir a été
amené en position d'ouverture et l'actionneur en position
d'alimentation pour provoquer un cycle d'ouverture de la
tringlerie ;
- les figures 8 et 9, d'une part, et 10 et 11, d'autre
part, sont des vues similaires à celles des figures 6 et 7 dans
lesquelles on a illustré le dispositif d'ouverture au cours d'un
cycle d'ouverture de la tringlerie, l'utilisateur ayant, dans le
premier cas, maintenu sa pression sur le poussoir, et dans le
deuxième cas, relâché le poussoir ;
- les figures 12 à 14 sont des vues similaires à celles
des figures 5 à 7 illustrant le basculement des moyens bistables
de rappel de l'actionneur qui permettent à celui-ci de s'effacer
vers sa position de coupure lorsque la tringlerie arrive en fin
de cycle d'ouverture alors que l'utilisateur a maintenu le
poussoir en position d'ouverture ; et
- les figures 15 et 16 sont des vues schématiques selon
l'axe longitudinal du dispositif illustrant la commande par came
de la tringlerie d'ouverture de la serrure.
Le dispositif 10 qui est illustré sur les figures est
destiné à assurer l'ouverture d'une serrure (non représentée)
qui maintient en position fermée un ouvrant de véhicule
automobile.
Le dispositif 10 est motorisé en ce qu'il comporte un
moteur électrique 12 qui, lorsqu'il est alimenté, provoque le
passage d'une tringlerie de commande 14 de la serrure d'un état
de fermeture à un etat d'ouverture dans lequel la serrure libère
l'ouvrant qui peut être alors ouvert.
Le moteur électrique 12 commande aussi le retour de la
tringlerie 14 vers un état initial de fermeture dans lequel la
serrure est amenée dans un état dans lequel elle est susceptible
de nouveau de maintenir l'ouvrant en position fermée.
Dans le dispositif 10, l'utilisateur provoque
l'ouverture de la serrure en amenant un organe de commande, ici
réalisé sous la forme d'un poussoir 16, d'une position
longitudinale reculée de repos, illustrée par exemple aux
figures 2 et 3, à une position longitudinale avancée d'ouverture
illustrée par exemple aux figures 5 et 6. Le poussoir 16 est
donc monté coulissant selon un axe longitudinal A1 dans un
boítier 18 qui est illustré plus particulièrement à la figure 2
et qui est destiné à être fixé sur un élément de carrosserie du
véhicule de telle manière que le poussoir 16 soit accessible
depuis l'extérieur du véhicule.
La tringlerie 14, qui est agencée longitudinalement en
avant d'une paroi transversale avant 20 du boítier 18, comporte
essentiellement une roue de commande 22, un levier de renvoi 24
et une tringle de liaison 26.
La roue 22 est montée à rotation autour de son axe
longitudinal A2, parallèle à l'axe A1 de coulissement du
poussoir 16, et elle est susceptible d'être entraínée en
rotation par le moteur électrique 12 dont l'arbre moteur, d'axe
A3 parallèle à l'axe A2, porte un pignon 28 qui engrène avec une
surface cylindrique externe dentée 30 de la roue 22.
Le levier de renvoi 24 est monté pivotant autour d'un
axe A4, parallèle aux axes A2 et A3 de la roue 22 et du moteur
12, dans un plan agencé longitudinalement en arrière de la roue
22 mais en avant de la paroi transversale avant 20 du boítier
18.
Le levier 24 comporte un doigt de palpage 32 qui est
destiné à coopérer avec une came 34 qui est agencée en relief
sur une surface transversale arrière 36 de la roue 22. Comme on
peut le voir plus particulièrement sur les figures 15 et 16, la
came 34 comporte une surface latérale 38 qui est excentrée par
rapport à l'axe A2 de rotation de la roue et le levier 24 est
sollicité en rotation autour de son axe A4 par des moyens
élastiques (non représentés) de telle manière que son doigt de
palpage 32 soit en appui, radialement par rapport à l'axe A2,
contre la surface latérale 38 de la came 34. De la sorte,
lorsque la roue 22 est entraínée en rotation autour de son axe
A2, le doigt de palpage 32 suit le profil de la surface de came
38 qui tourne avec la roue 22 et, en fonction de ce profil,
provoque la rotation du levier de renvoi 24 autour de son axe
A4.
La tringle 26 est reliée par une de ses extrémités 40
en rotation autour d'un axe A5, parallèle aux axes A4 et A2, au
levier 24 si bien que, lorsque celui-ci pivote autour de son axe
A4, la tringle 26 est animée sensiblement d'un mouvement de
translation selon sa direction d'allongement. L'autre extrémité
(non représentée) de la tringle 26 étant reliée à la serrure de
l'ouvrant, le dispositif 10 est ainsi susceptible de commander
l'ouverture de la serrure grâce à la tringlerie 14.
Comme on peut le voir sur la figure 1, le moteur
électrique 12 et la roue 22 sont destinés à être reçus dans un
carter avant 42 fixé en avant du boítier 18.
Comme on peut le voir sur les figures 15 et 16, le
profil de la surface de came 38 de la came 34 est tel qu'un
cycle d'ouverture de la tringlerie de commande 14 de la serrure,
qui comporte le passage d'un état de fermeture à un état
d'ouverture et - un retour à l'état de fermeture initial,
correspond à un tour complet de la roue 22.
Ainsi, selon une première caractéristique de
l'invention, le moteur électrique 12 est commandé toujours dans
le même sens de rotation puisque, après un tour complet de la
roue 22, le doigt de palpage 32 se retrouve en appui contre une
portion de la surface de commande 38 qui correspond à l'état de
fermeture de la serrure; après avoir parcouru l'intégralité du
profil de la surface 38 qui provoque son passage par une
position d'ouverture illustrée à la figure 16.
Par ailleurs, l'alimentation électrique du moteur
électrique 12 est commandée par un interrupteur 44 qui,
lorsqu'il est dans un état ouvert, interrompt l'alimentation du
moteur 12 qui reste alors à l'arrêt, et qui, dans un état fermé,
permet le passage du courant dans le circuit d'alimentation du
moteur 12, lequel provoque alors la rotation du pignon de
commande 28 et donc de la roue 22.
Bien entendu, le circuit d'alimentation du moteur 12
comportera de préférence un deuxième interrupteur qui sera
commandé par exemple par une centrale électronique d'antivol en
fonction d'une information de verrouillage ou de déverrouillage
fournie à la centrale par l'utilisateur au moyen par exemple
d'une télécommande. Ainsi, le moteur électrique 12 ne sera
alimenté en courant que si les deux interrupteurs, par exemple
agencés en série dans le circuit d'alimentation, sont
simultanément dans leur état fermé correspondant à un ordre
préalable de déverrouillage puis à un ordre d'ouverture de la
serrure.
Selon un autre aspect de l'invention, le poussoir 16
n'agit pas directement sur l'interrupteur 44, mais par
l'intermédiaire d'un actionneur 46. L'actionneur 46 comporte
essentiellement un corps principal allongé selon la direction
longitudinale A1 de coulissement du poussoir 16 et il est mobile
en coulissement selon cette direction entre une position
longitudinale reculée de coupure et une position longitudinale
avancée d'alimentation dans laquelle il coopère par une
extrémité longitudinale avant 48 avec l'interrupteur 44 pour
amener celui-ci à son état fermé dans lequel il est susceptible
d'alimenter le moteur électrique 12 en courant. Par son
extrémité longitudinale arrière 50, qui est reçue à l'intérieur
du boítier 18, en arrière de la paroi transversale avant 20 de
celui-ci, l'actionneur 46 est monté coulissant selon la
direction longitudinale A1 dans le poussoir 16.
Par rapport au poussoir 16, l'actionneur 46 peut donc
occuper une position relative avancée, lorsque l'actionneur 46
et l'organe de commande 16 sont simultanément et respectivement
dans leur position de coupure ou de repos ou, simultanément dans
leur position d'alimentation et d'ouverture. L'actionneur 46
peut aussi occuper, par rapport à l'organe de commande 16, une
position relative reculée dans laquelle il se trouve lorsque
l'organe de commande 16 est en position d'ouverture et que
l'actionneur 46 est ramené en position de coupure.
Des moyens élastiques bistables sont interposés entre
l'actionneur 46 et le poussoir 16 pour solliciter l'actionneur
46 vers l'une ou vers l'autre de ces deux positions relatives
par rapport au poussoir 16.
Ainsi, le dispositif 10 comporte une épingle 52 à deux
branches 54, 56 repliée en U. Les deux branches 54, 56
s'étendent sensiblement parallèlement selon une direction
transversale perpendiculaire à la direction de coulissement A1
du poussoir 16 et de l'actionneur 46. Une première des branches
54 est engagée dans un orifice 58 correspondant aménagé dans le
poussoir 16 de telle manière que l'épingle 52 n'a pas d'autres
possibilités que de pivoter autour de cette première branche 54
par rapport à l'organe de commande 16. La seconde branche 56 est
reçue à la fois dans un orifice correspondant 60 aménagé dans
l'actionneur 46 et dans une fenêtre longitudinale 62 aménagée
dans le poussoir 16. Ainsi, comme on peut le voir plus
particulièrement sur les figures 4 et 14, la course de
l'actionneur 46 par rapport au poussoir 16 est limitée par
l'arrivée en butée de la seconde branche 56 de l'épingle 42
contre l'une des extrémités longitudinales avant 64 et arrière
66 de la fenêtre 62 du poussoir 16.
Par ailleurs, lorsque l'actionneur 46 se déplace par
rapport au poussoir 16, il provoque donc une rotation de
l'épingle 52 autour de sa première branche 54, mais il provoque
aussi une déformation élastique de cette épingle 52 par
rapprochement de ses deux branches 54, 56.
Comme on peut le voir sur les figures, l'orifice 58
dans lequel est engagée la première branche 54 est agencé
longitudinalement sensiblement au même niveau que le milieu de
la fenêtre 62 dans laquelle se déplace la seconde branche 56. De
la sorte, lorsque la seconde branche 56 est longitudinalement au
milieu de la fenêtre 62, l'épingle 52 est dans son état de
déformation maximale si bien que le système constitué du
poussoir 16 de l'épingle 52 et de l'actionneur 46 est alors dans
une position d'équilibre instable, l'épingle 52 ayant alors
tendance, en se détendant, à provoquer le déplacement de
l'actionneur 46 vers l'une ou l'autre de ses positions relatives
avancée ou reculée par rapport au poussoir 16.
Selon encore un autre aspect de l'invention,
l'actionneur 16 comporte deux bras transversaux avant 68 et
arrière 70 qui sont destinés à coopérer avec la roue 22. Le bras
transversal avant 68 s'étend dans un plan transversal qui est
agencé longitudinalement en avant d'une face transversale avant
72 de la roue 22. Comme on peut le voir par exemple sur les
figures 2 à 4, la roue 22 comporte, sur cette face transversale
avant 72, une collerette 74 d'axe A2 qui est aménagée en relief
sur la face 72 et qui est pourvue d'une encoche 76.
En fonction de la position angulaire de la roue 22, le
bras transversal avant 68 est agencé longitudinalement en regard
soit de la collerette 74, soit de l'encoche 76. La collerette 74
présente une épaisseur longitudinale telle que, lorsque le bras
68 est en regard de la collerette, l'actionneur 46 ne peut être
ramené vers l'arrière vers sa position de coupure. Il ne peut
être ramené vers cette position que lorsqu'il est en regard de
l'encoche 76 aménagée dans la collerette 74.
Par ailleurs, lorsque l'actionneur 46 est en position
reculée de coupure, le bras transversal avant 68 est engagé dans
l'encoche 76 de la collerette 74 et le bras 68 empêche ainsi la
roue 74 de pouvoir pivoter autour de son axe A2 en venant en
appui contre les bords de l'encoche.
Le bras arrière 70 de l'actionneur 46 s'étend dans un
plan transversal qui est agencé en arrière de la face
transversale arrière 36 de la roue 22. Le bras arrière 70
comporte un tronçon transversal à l'extrémité libre duquel est
agencé un tronçon longitudinal 78 qui s'étend vers l'avant.
Comme on peut le voir par exemple sur la figure 1, la
face transversale arrière 36 de la roue 22 comporte une gorge
périphérique annulaire 80 d'axe A2 qui est aménagée en creux.
Lorsque l'actionneur 46 est en position avancée d'alimentation,
le tronçon longitudinal 78 du bras arrière 70 est engagé dans la
gorge 80. Par ailleurs, la roue 22 comporte une rampe 82 qui est
aménagée dans la gorge 80 et qui est destinée à coopérer avec le
tronçon longitudinal 78 du bras arrière 70 pour provoquer le
recul de l'actionneur 46 vers sa position reculée de coupure
lorsque la rampe 82 de la roue 22 arrive en coïncidence avec le
bras arrière 70
Le fonctionnement du dispositif 10 selon l'invention va
maintenant être décrit plus particulièrement en regard des
figures 2 à 12.
Lorsque le dispositif 10 est en position de repos
illustrée sur les figures 2 à 4, le poussoir 16 et l'actionneur
46 sont tous les deux dans leur position reculée, respectivement
de repos et de coupure. L'actionneur 46 est alors en position
relative avancée par rapport au poussoir 16 comme le montre la
figure 4 dans laquelle on peut voir que la seconde branche 56 de
l'épingle 52 est en appui contre l'extrémité longitudinale avant
64 de la fenêtre 62.
On peut voir aussi que le bras transversal avant 68 est
reçu dans l'encoche 76 de la collerette 74 de manière à bloquer
la rotation de la roue 22. Enfin, on peut voir sur la figure 3
que l'extrémité avant 48 de l'actionneur 46 ne coopère pas avec
l'interrupteur 44 qui est alors dans son état ouvert dans lequel
le moteur électrique 12 n'est pas alimenté en courant.
A partir de cette position de repos, l'utilisateur
peut, pour provoquer l'ouverture de la serrure, appuyer sur le
poussoir 16 afin de l'amener vers sa position avancée
d'ouverture ainsi que cela est représenté sur les figures 5 à 7.
On remarque alors que, du fait de l'action de l'épingle 52 qui
est dans une position d'équilibre stable, le poussoir 16
provoque le déplacement de l'actionneur 46 longitudinalement
vers l'avant vers sa position d'alimentation dans laquelle,
comme on peut le voir sur la figure 6, l'extrémité avant 48 de
l'actionneur 46 provoque le passage de l'interrupteur 44 à son
état fermé. L'actionneur 46 reste donc dans sa position relative
avancée par rapport au poussoir 16.
A ce moment-là, comme on peut le voir notamment sur la
figure 7, le bras transversal avant 68 est dégagé de l'encoche
76 tandis que le tronçon longitudinal 78 du bras arrière 70 est
engagé dans la gorge 80.
Le moteur électrique étant alimenté en courant et le
bras transversal avant 68 étant dégagé de la fente 76, la roue
22 est donc entraínée en rotation autour de son axe A2.
Il peut se produire alors deux types de situations.
Dans une première situation, illustrée aux figures 8 et 9
l'utilisateur peut relâcher immédiatement le poussoir 16 et
celui-ci, sollicité par un ressort de rappel 84, tend à être
ramené vers sa position de repos. Cependant, l'actionneur 46 est
alors en position avancée par rapport au poussoir 16 de sorte
que l'épingle 52, dont la seconde branche 56, solidaire
longitudinalement de l'actionneur 46, est en appui contre
l'extrémité longitudinale avant 64 de la fenêtre 62 du poussoir
16, empêche que le poussoir 16 ne recule vers sa position de
repos sans entraíner avec lui l'actionneur 46. Or, la roue 22
ayant commencé de pivoter autour de son axe A2 sous l'action du
moteur 12, le bras transversal avant 68 de l'actionneur 46 est
alors en regard de la collerette 74 et, sous l'effet du ressort
de rappel 84, le bras transversal avant 68 est sollicité en
appui longitudinalement vers l'arrière contre la collerette 74
qui empêche l'actionneur 46 de retourner vers sa position de
coupure, empêchant par là même au poussoir 16 de retourner vers
sa position de repos. Ainsi, même si l'utilisateur ne soumet le
poussoir 16 qu'à une brève impulsion, une fois que le cycle
d'ouverture de la serrure est entamé, il se poursuit jusqu'à sa
fin. En effet, l'actionneur 46 étant maintenu par la collerette
74 en position d'alimentation, le moteur électrique 12 continue
de faire tourner la roue 22 par l'intermédiaire du pignon de
commande 28.
Bien entendu, si l'utilisateur maintient la pression
sur le poussoir 16, le cycle d'ouverture se déroule normalement
ainsi que cela est représenté aux figures 10 et 11.
Dans le cas où l'utilisateur a relâché sa pression sur
le poussoir 16, le poussoir 16 et l'actionneur 46 vont pouvoir
regagner leur position respective de repos et de coupure dès que
la roue aura effectué un tour complet de telle manière que la
fente 76 se présente de nouveau en regard du bras transversal
avant 68 de l'actionneur 46. L'ensemble du poussoir 16 et de
l'actionneur 46 peut alors reculer sous l'action combinée du
ressort de rappel .84 et de la rampe 82 qui, lorsqu'elle arrive
au contact du tronçon longitudinal 78 du bras arrière 72, tend à
repousser l'actionneur 46 vers l'arrière.
Dès que l'actionneur 46 a regagné sa position de
coupure, le moteur électrique 12 n'est plus alimenté en courant
et il s'arrête de tourner. Le dispositif 10 a alors regagné son
état de repos et il est directement prêt à effectuer une
nouvelle opération d'ouverture de la serrure.
Selon un autre aspect de l'invention, il est résolu le
problème de pouvoir arrêter le moteur électrique 12 en fin de
cycle d'ouverture même si l'utilisateur maintient le poussoir 16
enfoncé en position d'ouverture.
En effet, comme on peut le voir plus particulièrement
sur les figures 12 à 14, en fin de cycle d'ouverture, la rampe
82 tend à repousser l'actionneur 46 vers l'arrière. Si le
poussoir 16 est maintenu enfoncé, l'actionneur 46 va pouvoir
malgré tout reculer vers sa position de coupure en se déplaçant
relativement par rapport au poussoir 16 vers sa position axiale
reculée. En effet, l'orifice 58 de l'actionneur 46 entraíne
alors la seconde branche 56 de l'épingle 52, longitudinalement
vers l'arrière, dans la fenêtre 62 du poussoir 16. Dans un
premier temps, ce recul de l'actionneur 46 va provoquer un
rapprochement des deux branches 54, 56 de l'épingle 52, jusqu'à
la position d'équilibre instable décrite plus haut, puis
l'épingle 52 va tendre à participer elle aussi au recul de
l'actionneur 46 jusqu'à ce que sa seconde branche 56 vienne en
appui contre l'extrémité longitudinale arrière 66 de la fenêtre
62. Par rapport au poussoir 16, l'actionneur 46 est alors dans
sa position relative reculée et, par rapport au dispositif 10,
il est dans sa position de coupure dans laquelle l'alimentation
électrique du moteur 12 est interrompue provoquant l'arrêt de la
rotation de la roue 22.
On notera d'ailleurs que, tant que l'utilisateur
maintient le poussoir 16 enfoncé, rien ne se passe. Au
contraire, dès que l'utilisateur relâche le poussoir 16, le
ressort de compression 84 repousse ce dernier vers sa position
de repos et il se produit alors un basculement de l'épingle 52,
l'actionneur 46 ne pouvant reculer plus loin que sa position de
coupure notamment du fait que son bras transversal avant 68
vient en appui contre la face transversale avant 72 de la roue
22.
Dès que le poussoir 16 a atteint sa position de repos,
l'actionneur 46 se retrouve alors dans sa position relative
avancée par rapport au poussoir 16 et le dispositif est de
nouveau prêt à provoquer une nouvelle ouverture de la serrure.
Il a été vu que, dans le mode de réalisation de
l'invention qui vient d'être décrit, un cycle complet
d'ouverture et de fermeture de la serrure correspond à un tour
complet de la roue 22. Cependant, on peut aussi prévoir qu'un
cycle complet ne corresponde qu'à une fraction de la rotation de
la roue 22, par exemple un demi-tour. Dans ce cas, il est
nécessaire que la roue 22 comporte une came adaptée, qui sera en
l'occurrence symétrique autour de l'axe A2, ainsi que deux
encoches et deux rampes 82 diamétralement opposées.
Dans tous les cas, le dispositif selon l'invention
permet de simplifier considérablement le circuit de commande du
moteur électrique. Il n'y a en effet pas à prévoir la prise en
compte d'informations en provenance de capteurs de fin de
course. Il n'y a pas non plus à prévoir de temporisation de
fonctionnement du moteur ou de dispositif d'inversion du courant
d'alimentation.
Le dispositif 10 selon l'invention se révèle simple et
économique à mettre en oeuvre, tout en assurant les mêmes
fonctions que les dispositifs de l'art antérieur.