EP0861649A2 - Rollstuhl - Google Patents
Rollstuhl Download PDFInfo
- Publication number
- EP0861649A2 EP0861649A2 EP98200480A EP98200480A EP0861649A2 EP 0861649 A2 EP0861649 A2 EP 0861649A2 EP 98200480 A EP98200480 A EP 98200480A EP 98200480 A EP98200480 A EP 98200480A EP 0861649 A2 EP0861649 A2 EP 0861649A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- wheel chair
- signal
- control unit
- control
- rotational position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images

Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/04—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven
- A61G5/041—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven having a specific drive-type
- A61G5/042—Front wheel drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2203/00—General characteristics of devices
- A61G2203/10—General characteristics of devices characterised by specific control means, e.g. for adjustment or steering
- A61G2203/14—Joysticks
Definitions
- the invention relates to a wheel chair comprising a frame and two front wheels, which can each be driven by an electric motor, and at least one castor present on the rear side, which is provided with a pivot pin comprising a straight-ahead position, and a control unit for the electric motors, which control unit comprises a control element, by means of which the user can control the speed and the direction of the wheel chair, which control element delivers a speed signal and a directional signal, whereby the control unit controls the electric motors in dependence on the output signals of said control element.
- Such a wheel chair is described in the applicant's European patent application No. 9 520 638.
- the control unit operates in the usual manner, such that the speed signal determines the rotational speed of the electric motors, whilst a directional signal which indicates a deviation from the straight-ahead position effects a speed difference between the two electric motors.
- this wheel chair is fitted with a mechanical facility which exerts a rotary force on the pivot pin in the direction of the straight-ahead position when the pivot pin pivots from the straight-ahead position.
- the object of the invention is to provide a wheel chair of the above-mebtioned kind, wherein the control unit for the electric motors that is already present is used advantageously for ensuring a proper directional stability in straight-ahead direction.
- the wheel chair according to the invention is fitted with a position sensor, which delivers a rotational position signal in dependence on the rotational position of the pivot pin of the castor, whereby control means are provided, which deliver a compensated directional signal to the control unit, such that the control unit controls the electric motors partially in dependence on the rotational position signal.
- Fig. 1 is a side view of an embodiment of the wheel chair according to the invention.
- Fig. 2 is a diagrammatic plan view of the frame of the wheel chair of Fig. 1.
- Fig. 3 is a side view of the frame of Fig. 1.
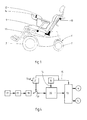
- Fig. 4 is a block diagram of the control means and the control unit of the wheel chair of Fig. 1.
- Fig. 1 shows a side view of a wheel chair which comprises a frame 1 as shown in Figs. 1 and 2 and two front wheels 2 and 3, which can each be driven by an electric motor 4 and 5 respectively.
- a centrally positioned castor assembly 6 which comprises two closely spaced wheels 7.
- Castor assembly 6 is provided with a pivot pin 8, which is illustrated in the straight-ahead position in the drawing.
- the wheel chair conventionally comprises a seat 9, an adjustable back support 10, leg supports 11 and armrests 12.
- the inclination of seat 9 is adjustable, as is described in more detail in the above-mentioned European patent application.
- Electric motors 4 and 5 can be controlled by means of a control unit indicated at 13 in the diagram of Fig. 4, which control unit is known per se and need not be described in more detail herein, therefore.
- the control of electric motors 4, 5, and thus of the speed and the direction of the wheel chair takes place by means of a control element 14, in the form of a joystick in the present embodiment, which is supported by one of the armrests 12, so that control element 14 is easy to operate for the user.
- Joystick 14 can be pivoted in all directions from a neutral position, in a manner which is known, whereby the direction in which the joystick is moved indicates the desired direction of movement of the wheel chair, and whereby the amount of travel of the joystick indicates the desired speed of the wheel chair.
- Joystick 14 delivers two output signals thereby, a speed signal 15 and a directional signal 16.
- Control unit 13 excites the electric motors 4 and 5 in dependence on these two signals. If directional signal 16 indicates a direction deviating from the straight-ahead direction, a speed difference between the two electric motors 4, 5 will be effected, such that the wheel chair will move in the desired direction.
- position sensor 17 is provided for ensuring a proper directional stability in straight-ahead direction, which sensor delivers a rotational position signal in dependence on the rotational position of pivot pin 8 of castor assembly 6.
- position sensor 17 is a potentiometer, which can be turned through 360°. It is also possible to use other types of position sensors, however.
- the rotational position signal of position sensor 17 is preferably supplied to a processing element 20 via a limiting element 18, whose operation will be discussed in more detail hereafter, and a switch 19.
- Said processing element 20 also receives the directional signal from control element 14. Processing element 20 combines the two input signals into a compensated directional signal, which is supplied to control unit 13.
- processing element 20 will deliver a directional signal to control unit 13 which causes control unit 13 to excite electric motors 4 and 5 unevenly, such that pivot pin 8 will return to the straight-ahead position.
- processing element 20 is to that end configured as an adding circuit, which adds the negative rotational position signal to the directional signal.
- Said adding circuit may for example comprise a differential amplifier.
- Limiting element 18 limits the rotational position signal of position sensor 17 to a small deviation from the value associated with the straight-ahead position, so that the compensated directional signal that is supplied to control unit 13 is limited, so that on the one hand an overly strong reaction of electric motors 4, 5 is avoided, while on the other hand a desired change of direction effected by means of control element 14 remains possible.
- the speed signal 15 of control element 14 is also supplied to a comparator 21, which compares the speed signal with a reference value V ref , which corresponds with a predetermined minimum speed in forward direction. When said reference value is exceeded, comparator 21 will trip switch 19, so that the rotational position signal of position sensor 17 is only supplied to processing element 20 at a higher speed in forward direction.
- an amplifier 22 is provided between position sensor 17 and limiting element 18, as a result of which even a small deviation from the straight-ahead position will lead to adequate compensation.
- control unit 13 for ensuring directional stability in straight-ahead direction of the wheel chair which control unit is already available, is used in an advantageous manner in the above-described wheel chair.
- safety of the wheel chair is improved by the fact that abrupt changes of course at higher speeds are prevented.
- wheel chair uses a centrally positioned castor assembly
- a position sensor may be placed on one of the pivot pins, or on both.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Non-Deflectable Wheels, Steering Of Trailers, Or Other Steering (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| NL1005297A NL1005297C1 (nl) | 1997-02-17 | 1997-02-17 | Rolstoel. |
| NL1005297 | 1997-02-17 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0861649A2 true EP0861649A2 (de) | 1998-09-02 |
| EP0861649A3 EP0861649A3 (de) | 1999-06-23 |
Family
ID=19764436
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP98200480A Withdrawn EP0861649A3 (de) | 1997-02-17 | 1998-02-16 | Rollstuhl |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP0861649A3 (de) |
| NL (1) | NL1005297C1 (de) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100435765C (zh) * | 2005-03-08 | 2008-11-26 | 中国科学院自动化研究所 | 一种嵌入式智能轮椅控制系统及方法 |
| US10864127B1 (en) | 2017-05-09 | 2020-12-15 | Pride Mobility Products Corporation | System and method for correcting steering of a vehicle |
| JP2023040562A (ja) * | 2021-09-10 | 2023-03-23 | 株式会社デンソー | 移動体、プログラム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4549624A (en) * | 1984-10-12 | 1985-10-29 | Everest & Jennings, Inc. | Wheelchair direction control means |
| NL9300400A (nl) * | 1993-03-05 | 1994-10-03 | Ligtvoet Products Bv | Aandrijfbesturingsinrichting voor een voertuig, in het bijzonder voor een rolstoel, en voertuig voorzien van een dergelijke aandrijfbesturingsinrichting. |
| NL9402006A (nl) * | 1994-11-29 | 1996-07-01 | Seenus Nl Bv R Van | Rolstoelframe, alsmede zwenkwielsamenstel. |
-
1997
- 1997-02-17 NL NL1005297A patent/NL1005297C1/nl not_active IP Right Cessation
-
1998
- 1998-02-16 EP EP98200480A patent/EP0861649A3/de not_active Withdrawn
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100435765C (zh) * | 2005-03-08 | 2008-11-26 | 中国科学院自动化研究所 | 一种嵌入式智能轮椅控制系统及方法 |
| US10864127B1 (en) | 2017-05-09 | 2020-12-15 | Pride Mobility Products Corporation | System and method for correcting steering of a vehicle |
| JP2023040562A (ja) * | 2021-09-10 | 2023-03-23 | 株式会社デンソー | 移動体、プログラム |
| EP4400356A4 (de) * | 2021-09-10 | 2024-12-25 | Denso Corporation | Beweglicher körper und programm |
Also Published As
| Publication number | Publication date |
|---|---|
| NL1005297C1 (nl) | 1998-08-18 |
| EP0861649A3 (de) | 1999-06-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11648995B2 (en) | Control of a transporter based on attitude | |
| US4549624A (en) | Wheelchair direction control means | |
| US4341278A (en) | Wheelchair | |
| CA2302684A1 (en) | Tilting vehicle | |
| US7090040B2 (en) | Motion control of a transporter | |
| US6308122B1 (en) | Steering system for motor vehicle | |
| US20160221595A1 (en) | Pushcart | |
| EP1512055A2 (de) | Von menschen/elektrisch angetriebenes hybridfahrzeug | |
| EP1055590A3 (de) | Maschine zum Reinigen von Oberflächen mit Multipositions-Bedienungspositionen | |
| CA2492393A1 (en) | Motion control for a transporter | |
| DE69501494D1 (de) | Rollstuhlrahmen und lenkkontrolleinheit | |
| EP0861649A2 (de) | Rollstuhl | |
| WO2000023297A1 (en) | Control apparatus and a method for steering an electric vehicle | |
| JPH09294779A (ja) | 車椅子 | |
| WO1994020325A1 (en) | Drive control device for a vehicle, in particular for a wheelchair, and vehicle provided with such a drive control device | |
| EP0376512A3 (de) | Fahzeuglenksystem | |
| JPH09130921A (ja) | 電動車両の速度制御装置 | |
| GB2170456A (en) | Front and rear wheel steering device for a vehicle | |
| JP3763249B2 (ja) | 全方向移動型台車 | |
| CN219601278U (zh) | 具有速度和转向控制的搬运车 | |
| JPS61215167A (ja) | 作業車の操向制御装置 | |
| JP2576256B2 (ja) | シートスライド連動式の可変シート装置 | |
| JP2002085471A (ja) | 電動車椅子の操作装置 | |
| JPH05170121A (ja) | 車両の操舵装置 | |
| JP6880716B2 (ja) | 小型電動車両のアクセル装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE CH DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE CH DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| RIC1 | Information provided on ipc code assigned before grant |
Free format text: 6A 61G 5/04 A, 6B 62D 11/04 B |
|
| AKX | Designation fees paid | ||
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: 8566 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 19991224 |