EP0600183A1 - Conveyor gripper for conveying printed products of one or more sheets - Google Patents
Conveyor gripper for conveying printed products of one or more sheets Download PDFInfo
- Publication number
- EP0600183A1 EP0600183A1 EP93115956A EP93115956A EP0600183A1 EP 0600183 A1 EP0600183 A1 EP 0600183A1 EP 93115956 A EP93115956 A EP 93115956A EP 93115956 A EP93115956 A EP 93115956A EP 0600183 A1 EP0600183 A1 EP 0600183A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- gripper
- bearing
- bearing part
- gripper part
- free end
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000006835 compression Effects 0.000 claims abstract description 19
- 238000007906 compression Methods 0.000 claims abstract description 19
- 239000000047 product Substances 0.000 claims description 26
- 230000005540 biological transmission Effects 0.000 claims description 3
- 230000000903 blocking effect Effects 0.000 claims description 2
- 230000000284 resting effect Effects 0.000 claims description 2
- 239000013589 supplement Substances 0.000 claims description 2
- 230000001960 triggered effect Effects 0.000 claims 1
- 230000002349 favourable effect Effects 0.000 abstract description 2
- 238000000034 method Methods 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000002040 relaxant effect Effects 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H29/00—Delivering or advancing articles from machines; Advancing articles to or into piles
- B65H29/003—Delivering or advancing articles from machines; Advancing articles to or into piles by grippers
Definitions
- the present invention relates to a gripper for a conveying device for conveying single- or multi-sheet printed products, such as newspapers, magazines and parts thereof, as well as supplements therefor according to claim 1, with the known grippers of this type, such as those e.g. in DE-A-31 02 242 (and the corresponding US-A-4,381,056), larger clamping forces can be achieved with a compact design.
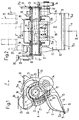
- the grippers 10 shown in the figures have a first gripper part 11, the leg of which is designated by 12, and a second gripper part 13, the leg of which is designated by 14. When the grippers 10 are open, the two gripper parts 11 and 13 define a gripper opening 15.
- the first gripper part 11 can be pivoted with respect to the second gripper part 13 and will be shown in FIGS. 1 and 2 in its closed position, in which its free end 12a and the free end 14a of the second gripper part 13 are used to clamp a printed product (in Figures 1 and 2 not shown) cooperates.
- the second gripper part 13 is formed in one piece with a support part 16 which is pivotally mounted on a hollow shaft 17, the longitudinal axis of which is designated 17 '.
- the shaft 17, which, as can be seen from the figures, is provided with longitudinal grooves, is rotatably mounted in a bracket 18 with a U-shaped cross section, which is fastened to a link chain 19 which is guided in a guide channel 20 (see FIG. 2).
- this endless link chain 19, which is of a known type a large number of grippers 10 are attached at regular intervals, which in a known manner belong to a conveying device for conveying printed products, as described, for example, in EP-A-0 330 868 ( and the corresponding US-A-4,953,847).
- FIG. 1 The conveying direction of this conveying device is shown in FIG. 1 with an arrow denoted by F. As can be seen from this figure 1, the gripper opening 15 points backwards with respect to this conveying direction F.
- a bearing part 21 for the first gripper part 11 is also connected in a rotationally fixed manner to the shaft 17.
- the latter is pivoted and tiltable in this bearing part 21 by means of a ball joint 22 in a manner to be described.
- the ball joint 22 has a socket part 23 formed in the bearing part 21, in which a ball part 24 is held, which is formed at the end of the leg 12 of the first gripper part 11.
- the ball joint 22 is designed in the manner of a snap connection, ie the first gripper part 11 can be pressed with its ball part 24 into the socket part 23 in a simple manner during assembly of the gripper 10.
- the first gripper part 11 can be pivoted on the one hand about an axis 25 which runs essentially parallel to the longitudinal axis 17 'of the carbon shaft 17.
- the first gripper part 11 is pivoted away from or towards the second gripper part 13.
- the spherical mounting of the first gripper part 11 also allows the first gripper part 11 to tilt about a tilt axis 26, which is formed by the longitudinal axis running from the ball joint 22 to the free end 12a of the first gripper part 11, as can be seen in FIG. 2 .
- This possibility of tilting the first gripper part 11 about this tilt axis 26 also allows printed products which have different thicknesses across the width of the gripper 10 to be held securely.
- the latter is arranged between two guide walls 21a, 21b (FIG. 2) formed on the bearing part 21.
- the ball joint 22 is offset from the free end 12a of the first gripper part 11 in relation to the longitudinal axis 17 'of the hollow shaft 17 and thus the pivot axis of the bearing part 21.
- the movable gripper part 11 is mounted outside the actual gripper axis, which is formed by the longitudinal axis 17 'of the hollow shaft 17, which also forms the pivot axis for the second gripper part 13 and thus for the entire gripper 10.
- a compression spring 27 is supported on the bearing part 21 for the first gripper part 11, which is supported at the other end on the leg 12 of the first gripper part 11 and brings this gripper part 11 into contact with the bottom 21c of the bearing part 21 (FIG. 3).
- a rotational movement of the shaft 17 and thus also of the bearing part 21 is transmitted counterclockwise via this compression spring 27 to the first gripper part 11, which does not result in the latter being pivoted out of one in the figures Open position shown in the clamped position, which is shown in Figure 4.
- a locking lever 28 is connected to the shaft 17 in a rotationally fixed manner, the pivot axis of which coincides with the longitudinal axis 17 'of the hollow shaft 17.
- the locking lever 28 carries a follower roller 29 which can be freely rotated.
- this follower roller 29 interacts with the stationary closing link 30, of which a closing link is shown in FIGS. 1, 2 and 3.
- a locking device which has a locking lever 31 which is pivotably mounted on the support part 16.
- This locking lever 31 has at one end a locking lug 32, which cooperates with a locking member 33 for locking the bearing part 21, which is connected at one end to the hollow shaft 17 in a rotationally fixed manner.
- This blocking element 33 is completely visible in FIG. 1 and partially cut away in FIG. 2.
- the locking lever 31 is held in its locked position by means of a spring, not shown.
- the end 31a of the two-armed locking lever 31 opposite the latching lug 32 is intended to cooperate with opening scenes, not shown in the figures, which cause the locking lever 31 to pivot from the locked position into a release position.
- a positioning follower roller 34 is arranged on the support part 16 for the second gripper part 13 on the same side as the locking lever 31 and is freely rotatable. This positioning follower roller 34 interacts with positioning links 35, by means of which the pivot position of the second gripper part 13 and thus of the open and closed gripper 10 is determined. It understands It is clear that the positioning links 35 must be designed in accordance with the respectively desired pivot position of the grippers 10.
- a control cam 36 is provided on the support part 16 for the second gripper part 13 on the side opposite the positioning follower roller 34.
- this control cam 36 By interaction of this control cam 36 with control links, of which a link 37 is shown in FIG. 2, the support part 16 and thus the second gripper part 13 is pivoted into a position which is favorable for the interaction of the positioning follower roller 34 and the stationary positioning link 35.
- This means that the grippers 10 can assume any swivel position outside the area of the product transfer and delivery and that the gripper 10 is then pre-positioned via this control cam 36 and the associated link 37 before the positioning follower roller 34 enters the area of the positioning link 35 reached.
- the rotational movement of the bearing part 21 is transmitted via the compression spring 27 to the leg 12 of the first gripper part 11 without the compression spring 27 being initially tensioned further.
- the first gripper part 11 is thereby pivoted in the direction of the second gripper part 13 and thus against the clamping position. If the closing lever 28 has now reached its position shown in FIG. 3, the free end 12a of the first gripper part 11 comes into contact with the product P to be clamped, which lies on the leg 14 of the second gripper part 13 with the side lying underneath. In this position, the compression spring 27 already exerts a certain clamping force. As can be seen from FIG. 3, the locking member 33 already begins to run onto the locking lug 32 of the locking lever 31.
- the end 12a of the first gripper part 11 moves along an arc of a circle K 1 to the point designated by 1 in FIG.
- the center of the circular arc K1 lies on the longitudinal axis 17 'of the hollow shaft 17 (which is also the pivot axis of the bearing part 21).
- the radius of the circular arc K1 is denoted by R1.
- the first gripper part 11 located in this intermediate position is indicated by dash-dotted lines, the ball joint 22 assuming the position denoted by 1.
- the ball joint 22 ' is moved into the position denoted by 2 in FIG. 5, while the free end 12a of the first gripper part 11 resting on the printed product P initially moves backwards by the distance b into the position likewise denoted by 2.
- This displacement of the free end 12a of the first gripper part 11 exerts a tensile effect on the printed product P which tends to push the printed product a little further into the gripper 10.
- the free end 12a of the first gripper part is then further pivoting the first gripper part 11 along an arc K2 moves, the center of which lies on the pivot axis 25 determined by the ball joint 22 'and whose radius is denoted by R2.
- the end 12a of the first gripper part 11 moves along the circular arc K 1 until this end 12 a strikes a printed product.
- the aforementioned rearward movement of the end 12a of the gripper part 11 is therefore extremely small or practically nonexistent in the case of thin products.
- c denotes the width of the gripper opening 15 that can be used for gripping printed products of different thicknesses.
- the ball joint 22 or the pivot axis 25 of the first clamping part 11 defined thereby is backwards by the distance a with respect to the pivot axis 17 'of the bearing part 21, ie in a direction from the free end 12a of the first Gripper part 11 away, offset.
- an extension of the leg 12 of the first gripper part 11 in the direction away from the line of action 38 (FIG. 5) of the compression spring 27 is obtained.
- the part of the leg 12 lying between the line of application 38 of the compression spring 27 and the free end 12a need not of the first gripper part 11 can be extended, which enables a compact design with the shortest possible gripper legs 12, 14.
- this pivot bearing can be designed as a ball joint 22 which, as explained, enables the first gripper part 11 to tilt somewhat about its longitudinal axis 26 (see FIG. 2).
- the position of the first gripper part 11 can thus be adapted to a printed product P, even if this should have a different thickness over its width. This means that in the area of the free end 12a of the first gripper part 11 there is an essentially equally strong clamping of the printed product P over its entire width d (FIG. 2), even if the latter is unevenly thick. This ensures that the printed products are properly clamped.
- FIG. 6 shows a gripper 10 which corresponds in construction to the gripper shown in FIGS. 1-4, but which is pivoted into a position in which the gripper opening 15 runs ahead in the direction of movement F of the gripper 10. From the representations of Figures 1 and 6 it can be seen how large the usable swivel range is, i.e. in which different positions the gripper 10 can grasp or deliver printed products.
- a clamping member 39 facing the other gripper part 11 is provided on the second gripper part 13 in the region of its free end 14a and serves to clamp a printed product P '.
- the clamping member 39 has a clamping surface 39a which, when the gripper 10 is closed, lies opposite the end 12a of the gripper part 11 and runs approximately parallel to it.
- the printed product P ' is held between the clamping surface 39a of the clamping member 39 and the free end 12a of the first gripper part 11 in a specific, defined position.
- the displacement of the pivot axis 25 of the first gripper part 11 relative to the pivot axis 17 'of the bearing part 21 provides freedom in the design of the pivot bearing for this first gripper part 11.
- the design of this pivot bearing as a ball joint 22 creates the possibility that the first gripper part 11 can perform a certain tilting movement about its longitudinal axis 26.
- the pivot bearing can also be designed differently to enable the first gripper part 11, in addition to one Pivoting movement about an axis 25 running essentially parallel to the pivot axis 17 'of the bearing part 21 also has to perform a tilting movement about the longitudinal axis 26 of the first gripper part 11, which essentially runs from the pivot bearing 22 to the free end 12a of the first gripper part 11.
- the gripper parts 11 and 13 can be produced from plastic. It is not necessary for the legs 12, 14 of the gripper parts 11, 13 to be very flexible. However, it is now also possible to design at least the leg 12 of the first gripper part 11 as a spiral spring and to arrange an essentially inelastic transmission element on the bearing part 21 instead of the compression spring 27, which is approximately in the direction of the line of action 38 (FIG. 5) on the leg 12 of the acts first gripper part 11 and takes it first and then bends at the end of the closing process described with reference to Figures 3 and 4, so as to generate the desired clamping force at the free end of the first gripper part 11.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Discharge By Other Means (AREA)
- Supply, Installation And Extraction Of Printed Sheets Or Plates (AREA)
- Intermediate Stations On Conveyors (AREA)
- Feeding Of Articles By Means Other Than Belts Or Rollers (AREA)
- Attitude Control For Articles On Conveyors (AREA)
- Manipulator (AREA)
- Sheets, Magazines, And Separation Thereof (AREA)
- Specific Conveyance Elements (AREA)
- Collation Of Sheets And Webs (AREA)
- Laminated Bodies (AREA)
- Load-Engaging Elements For Cranes (AREA)
- Packaging Of Annular Or Rod-Shaped Articles, Wearing Apparel, Cassettes, Or The Like (AREA)
- Photographic Developing Apparatuses (AREA)
- Wrappers (AREA)
- Footwear And Its Accessory, Manufacturing Method And Apparatuses (AREA)
- Ladders (AREA)
- Refuse Collection And Transfer (AREA)
- Re-Forming, After-Treatment, Cutting And Transporting Of Glass Products (AREA)
Abstract
Description
Die vorliegende Erfindung betrifft einen Greifer für eine Fördereinrichtung zum Fördern von ein- oder mehrblättrigen Druckereierzeugnissen, wie Zeitungen, Zeitschriften und Teilen hievon sowie Beilagen hiezu gemäss Anspruch 1, mit dem gegenüber bekannten Greifern dieser Art, wie sie z.B. in der DE-A-31 02 242 (und der entsprechenden US-A-4,381,056) beschrieben sind, bei kompakter Bauweise grössere Klemmkräfte erzielt werden können.The present invention relates to a gripper for a conveying device for conveying single- or multi-sheet printed products, such as newspapers, magazines and parts thereof, as well as supplements therefor according to claim 1, with the known grippers of this type, such as those e.g. in DE-A-31 02 242 (and the corresponding US-A-4,381,056), larger clamping forces can be achieved with a compact design.
Bevorzugte Weiterausgestaltungen des erfindungsgemässen Greifers sind in den abhängigen Ansprüchen umschrieben.Preferred further developments of the gripper according to the invention are described in the dependent claims.
Im folgenden werden Ausführungsbeispiele des Erfindungsgegenstandes anhand der Zeichnung näher erläutert. Es zeigt:
- Fig. 1
- in Seitenansicht einen Greifer im geschlossenen Zustand,
- Fig. 2
- den Greifer gemäss Fig. 1 in Vorderansicht in Richtung des Pfeiles A in Figur 1 und teilweise im Schnitt,
- Fig. 3
- im Schnitt entlang der Linie III-III in Figur 2 einen Greifer zu Beginn des Klemmens eines Druckereierzeugnisses,
- Fig. 4
- in einer der Figur 3 entsprechenden Darstellung den Greifer am Ende des Klemmvorganges, d.h. in Schliessstellung,
- Fig. 5
- in schematischer Darstellung das Funktionsprinzip des in den Figuren 1 und 2 gezeigten Greifers, und
- Fig. 6
- in einer der Figur 1 entsprechenden Darstellung eine andere Ausführungsform eines erfindungsgemässen Greifers in einer anderen Schwenklage als wie in Figur 1 dargestellt.
- Fig. 1
- in side view a gripper in the closed state,
- Fig. 2
- 1 in front view in the direction of arrow A in FIG. 1 and partly in section,
- Fig. 3
- 2 shows a gripper at the beginning of the clamping of a printed product, in section along the line III-III in FIG. 2,
- Fig. 4
- in a representation corresponding to FIG. 3, the gripper at the end of the clamping process, ie in the closed position,
- Fig. 5
- the operating principle of the gripper shown in Figures 1 and 2 in a schematic representation, and
- Fig. 6
- in a representation corresponding to FIG. 1, another embodiment of a gripper according to the invention in a different pivot position than as shown in FIG. 1.
Die in den Figuren dargestellten Greifer 10 weisen einen ersten Greiferteil 11, dessen Schenkel mit 12 bezeichnet ist, sowie einen zweiten Greiferteil 13 auf, dessen Schenkel mit 14 bezeichnet ist. Im geöffneten Zustand der Greifer 10 legen die beiden Greiferteile 11 und 13 eine Greiferöffnung 15 fest. Der erste Greiferteil 11 ist auf noch zu beschreibende Weise bezüglich des zweiten Greiferteiles 13 verschwenkbar und ist in den Figuren 1 und 2 in seiner Schliessstellung gezeigt, in der sein freies Ende 12a mit dem freien Ende 14a des zweiten Greiferteiles 13 zum Festklemmen eines Druckereierzeugnisses (in den Figuren 1 und 2 nicht gezeigt) zusammenwirkt.The
Der zweite Greiferteil 13 ist einstückig mit einem Tragteil 16 ausgebildet, der verschwenkbar auf einer Hohlwelle 17 gelagert ist, deren Längsachse mit 17' bezeichnet ist. Die Welle 17, die wie aus den Figuren ersichtlich mit Längsnuten versehen ist, ist drehbar in einer im Querschnitt U-förmigen Halterung 18 gelagert, die an einer Gliederkette 19 befestigt ist, die in einem Führungskanal 20 geführt ist (siehe Figur 2). An dieser endlos ausgebildeten Gliederkette 19, die von bekannter Bauart ist, sind in regelmässigen Abständen eine Vielzahl von Greifern 10 befestigt, die auf bekannte Weise zu einer Fördereinrichtung zum Fördern von Druckereierzeugnissen gehören, wie sie z.B. in der EP-A-0 330 868 (und der entsprechenden US-A-4,953,847) gezeigt und beschrieben ist.The
Die Förderrichtung dieser Fördereinrichtung ist in Figur 1 mit einem mit F bezeichneten Pfeil eingezeichnet. Wie dieser Figur 1 zu entnehmen ist, weist die Greiferöffnung 15 bezüglich dieser Förderrichtung F nach hinten.The conveying direction of this conveying device is shown in FIG. 1 with an arrow denoted by F. As can be seen from this figure 1, the
Mit der Welle 17 ist weiter drehfest ein Lagerteil 21 für den ersten Greiferteil 11 verbunden. Letzterer ist mittels eines Kugelgelenkes 22 auf noch zu beschreibende Weise schwenkbar und kippbar in diesem Lagerteil 21 gelagert. Das Kugelgelenk 22 weist einen im Lagerteil 21 ausgebildeten Pfannenteil 23 auf, in dem ein Kugelteil 24 gehalten ist, der am Ende des Schenkels 12 des ersten Greiferteils 11 ausgebildet ist. Das Kugelgelenk 22 ist in der Art einer Schnappverbindung ausgebildet, d.h. der erste Greiferteil 11 kann bei der Montage des Greifers 10 mit seinem Kugelteil 24 auf einfache Weise in den Pfannenteil 23 hineingedrückt werden. Durch die erwähnte Ausbildung des Lagers für den ersten Greiferteil 11 als Kugelgelenk 22 lässt sich der erste Greiferteil 11 zum einen um ein Achse 25 verschwenken, die im wesentlichen parallel zur Längsachse 17' der Kohlwelle 17 verläuft. Bei einem Verschwenken des ersten Greiferteils 11 um diese Schwenkachse 25 wird der erste Greiferteil 11 vom zweiten Greiferteil 13 weg bzw. zu diesem hin verschwenkt. Auf der andern Seite lässt die kugelige Lagerung des ersten Greiferteils 11 auch ein Kippen des ersten Greiferteils 11 um eine Kippachse 26 zu, welche durch die vom Kugelgelenk 22 zum freien Ende 12a des ersten Greiferteils 11 verlaufende Längsachse gebildet wird, wie das aus Figur 2 hervorgeht. Diese Möglichkeit des Kippens des ersten Greiferteiles 11 um diese Kippachse 26 erlaubt ein einwandfreies Festhalten auch von Druckereierzeugnissen, die über die Breite des Greifers 10 unterschiedlich dick sind. Um unerwünschte und unkontrollierte Bewegungen des kugelig gelagerten ersten Greiferteiles 11 zu verhindern ist letzterer zwischen zwei am Lagerteil 21 ausgebildeten Führungswänden 21a, 21b (Fig. 2) angeordnet.A bearing
Wie aus den Figuren ohne weiteres ersichtlich ist, ist das Kugelgelenk 22 gegenüber der Längsachse 17' der Hohlwelle 17 und damit der Schwenkachse des Lagerteiles 21 vom freien Ende 12a des ersten Greiferteils 11 her gesehen nach rückwärts versetzt. Anders ausgedrückt ist der bewegliche Greiferteil 11 ausserhalb der eigentlichen Greiferachse gelagert, die durch die Längsachse 17' der Hohlwelle 17 gebildet ist, die auch die Schwenkachse für den zweiten Greiferteil 13 und damit des gesamten Greifers 10 bildet. Auf die Vorteile dieser Anordnung, soweit sie sich nicht bereits aus den bisherigen Erläuterungen ergeben, wird im Zusammenhang mit der Figur 5 noch zurückzukommen sein.As is readily apparent from the figures, the ball joint 22 is offset from the
Am Lagerteil 21 für den ersten Greiferteil 11 stützt sich eine Druckfeder 27 ab, die sich am andern Ende auf dem Schenkel 12 des ersten Greiferteiles 11 abstützt und diesen Greiferteil 11 zur Anlage am Boden 21c des Lagerteils 21 bringt (Fig. 3). Wie aus den Figuren 1, 3 und 4 ohne weiteres ersichtlich ist, wird eine Drehbewegung der Welle 17 und damit auch des Lagerteiles 21 im Gegenuhrzeigersinn über diese Druckfeder 27 auf den ersten Greiferteil 11 übertragen, was ein Verschwenken des letzteren aus einer in den Figuren nicht gezeigten Offenstellung in die Klemmstellung zur Folge hat, die in Figur 4 dargestellt ist.A
Mit der Welle 17 ist drehfest ein Schliesshebel 28 verbunden, dessen Schwenkachse mit der Längsachse 17' der Hohlwelle 17 zusammenfällt. An seinem freien Ende trägt der Schliesshebel 28 eine Folgerolle 29, die frei drehbar ist. Zum Verschwenken der Hohlwelle 17 und damit des Lagerteiles 21 wirkt diese Folgerolle 29 mit ortsfesten Schliesskulissen 30 zusammen, von denen in den Figuren 1, 2 und 3 eine Schliesskulisse gezeigt ist.A locking
Zur Blockierung des Lagerteiles 21 in seiner Schliessstellung ist eine Verriegelungseinrichtung vorhanden, die einen Verriegelungshebel 31 aufweist, der schwenkbar am Tragteil 16 gelagert ist. Dieser Verriegelungshebel 31 weist an seinem einen Ende eine Rastnase 32 auf, welche zur Verriegelung des Lagerteiles 21 mit einem Sperrorgan 33 zusammenwirkt, das am einen Ende der Hohlwelle 17 drehfest mit dieser verbunden ist. Dieses Sperrorgan 33 ist in Figur 1 vollständig sichtbar und in Figur 2 zum Teil weggeschnitten dargestellt. Der Verriegelungshebel 31 wird mittels einer nicht gezeigten Feder in seiner Sperrstellung gehalten. Das der Rastnase 32 gegenüberliegende Ende 31a des zweiarmigen Verriegelungshebels 31 ist dazu bestimmt, mit in den Figuren nicht dargestellten Oeffnungskulissen zusammenzuwirken, welche ein Verschwenken des Verriegelungshebels 31 aus der Sperrstellung in eine Freigabestellung bewirken.To block the bearing
Am Tragteil 16 für den zweiten Greiferteil 13 ist auf der gleichen Seite wie der Verriegelungshebel 31 eine Positionierfolgerolle 34 angeordnet, die frei drehbar gelagert ist. Diese Positionierfolgerolle 34 wirkt mit Positionierkulissen 35 zusammen, durch die die Schwenklage des zweiten Greiferteiles 13 und damit des offenen und geschlossenen Greifers 10 festgelegt wird. Es versteht sich, dass die Positionierkulissen 35 der jeweils gewünschten Schwenklage der Greifer 10 entsprechend ausgebildet sein müssen.A
Am Tragteil 16 für den zweiten Greiferteil 13 ist an der der Positionierfolgerolle 34 gegenüberliegenden Seite ein Steuernocken 36 vorgesehen. Durch Zusammenwirken dieses Steuernockens 36 mit Steuerkulissen, von denen in Fig. 2 eine Kulisse 37 dargestellt ist, wird der Tragteil 16 und damit der zweite Greiferteil 13 in eine für das Zusammenwirken von Positionierfolgerolle 34 und orstfester Positionierkulisse 35 günstige Position verschwenkt. Dies bedeutet, dass die Greifer 10 ausserhalb des Bereiches der Produkteübernahme und -abgabe irgend eine beliebige Schwenklage einnehmen können und dass dann über diesen Steuernocken 36 und die zugeordnete Kulisse 37 eine Vorpositionierung des Greifers 10 erfolgt, bevor die Positionierfolgerolle 34 in den Bereich der Positionierkulisse 35 gelangt.A
Im folgenden wird nun die Funktionsweise eines Greifers 10 anhand der Figuren 1-4 erläutert.The operation of a
In der in den Figuren nicht dargestellten Offenstellung des Greifers 10, d.h. bei sich in Offenstellung befindlichem Lagerteil 21, ist die Druckfeder 27 bereits gespannt. Vor dem Schliessen des Greifers 10 wird dieser, d.h. der zweite Greiferteil 13, gegebenenfalls durch den Steuernocken 36 und die mit diesem zusammenwirkende Kulisse 37 vorpositioniert und dann durch die auf die Positionierfolgerolle 34 einwirkende Positionierkulisse 35 in die gewünschte Produkteaufnahmeposition, die in den Figuren 3 und 4 dargestellt ist, gebracht und in dieser gehalten. Zum Verschwenken des Lagerteiles 21 von der Offenstellung in die Schliessstellung kommt die Schliesskulisse 30 zur Einwirkung auf die Folgerolle 29 des Schliesshebels 28, der dadurch im Gegenuhrzeigersinn verschwenkt wird. Das hat eine entsprechende Drehung der Hohlwelle 17 und damit auch des Lagerteils 21 zur Folge. Die Drehbewegung des Lagerteils 21 wird über die Druckfeder 27 auf den Schenkel 12 des ersten Greiferteiles 11 übertragen, ohne dass dabei die Druckfeder 27 vorerst weiter gespannt wird. Der erste Greiferteil 11 wird dadurch in Richtung gegen den zweiten Greiferteil 13 und somit gegen die Klemmstellung verschwenkt. Hat nun der Schliesshebel 28 seine in Figur 3 dargestellte Stellung erreicht, kommt das freie Ende 12a des ersten Greiferteiles 11 mit dem festzuklemmenden Produkt P, das mit der unten liegenden Seite auf dem Schenkel 14 des zweiten Greiferteiles 13 aufliegt, in Berührung. In dieser Stellung übt die Druckfeder 27 bereits eine gewisse Klemmkraft aus. Wie aus Figur 3 ersichtlich ist, beginnt jetzt auch schon das Sperrorgan 33 auf die Rastnase 32 des Verriegelungshebels 31 aufzulaufen. Beim Weiterdrehen des Schliesshebels 28 wird nun der Verriegelungshebel 31 durch das weiterhin auf die Rastnase 32 einwirkende Sperrorgan 33 aus seiner Sperrstellung zurückgedrängt, d.h. im Gegenuhrzeigersinn verschwenkt. Hat nun der Schliesshebel 28 seine durch die Schliesskulisse 30 vorgegebene Endstellung erreicht, so erfolgt eine Verriegelung des Schliesshebels 28 und des Lagerteiles 21 in seiner Schliessstellung durch die auf das Sperrorgan 33 einwirkende Rastnase 32 des Verriegelungshebels 31 (Fig. 4). Während des Verschwenkens des Schliesshebels 28 von der in Figur 3 gezeigten Position in die Position gemäss Figur 4 wird die Druckfeder 27 zusammengedrückt, was zur Folge hat, dass die Klemmkraft, die vom ersten Greiferteil 11 ausgeübt wird, entsprechend erhöht wird. Die Grösse dieser Klemmkraft hängt neben der bereits in Offenstellung des Greifers 10 auf den Greiferteil 11 wirkenden Kraft der Druckfeder 27 (Vorspannkraft) auch von der Dicke des zwischen den Greiferteilen 11, 13 festgeklemmten Druckereierzeugnisses P ab.In the open position of the
Der vorstehend beschriebene Schliessvorgang wird nun anhand der Figur 5, in der die einzelnen Teile eines Greifers 10 nur schematisch dargestellt sind, noch näher erläutert.The closing process described above will now be explained in more detail with reference to FIG. 5, in which the individual parts of a
Während des Verschwenkens des Lagerteiles 21 und damit auch des ersten Greiferteils 11 in die in Figur 3 gezeigte Zwischenposition, bewegt sich das Ende 12a des ersten Greiferteiles 11 entlang eines Kreisbogens K₁ bis zur in Figur 5 mit 1 bezeichneten Stelle. Das Zentrum des Kreisbogens K₁ liegt auf der Längsachse 17' der Hohlwelle 17 (die ja auch die Schwenkachse des Lagerteiles 21 ist). Der Radius des Kreisbogens K₁ ist mit R₁ bezeichnet. Der sich in dieser Zwischenposition befindliche erste Greiferteil 11 ist strichpunktiert angedeutet, wobei das Kugelgelenk 22 die mit 1 bezeichnete Position einnimmt. Beim Weiterdrehen des Lagerteiles 21, welches wie bereits erläutert ein Zusammendrücken der Druckfeder 27 zur Folge hat, tritt zwischen dem Lagerteil 21 und dem ersten Greiferteil 11 eine Relativbewegung auf. Das Kugelgelenk 22' wird in die in Figur 5 mit 2 bezeichnete Position bewegt, während sich das auf dem Druckereierzeugnis P aufliegende freie Ende 12a des ersten Greiferteiles 11 vorest einmal um die Strecke b nach rückwärts in die ebenfalls mit 2 bezeichnete Stellung verschiebt. Durch diese Verschiebung des freien Endes 12a des ersten Greiferteiles 11 wird auf das Druckereierzeugnis P eine Zugwirkung ausgeübt, die bestrebt ist, das Druckereierzeugnis noch etwas weiter in den Greifer 10 hineinzuschieben. Das freie Ende 12a des ersten Greiferteiles wird anschliessend beim weitern Verschwenken des ersten Greiferteiles 11 entlang eines Kreisbogens K₂ bewegt, dessen Zentrum auf der durch das Kugelgelenk 22' bestimmten Schwenkachse 25 liegt und dessen Radius mit R₂ bezeichnet ist.During the pivoting of the bearing
Wie erwähnt bewegt sich das Ende 12a des ersten Greiferteils 11 solange entlang des Kreisbogens K₁ bis dieses Ende 12a auf ein Druckereierzeugnis auftrifft. Bei dünnen Druckereiprodukten bedeutet dies, dass das Greiferteilende 12a bis nahe an die mit 2 bezeichnete Stelle, d.h. bis nahe zum Ende 14a des andern Greiferteils 13, entlang dieses Kreisbogens K₁ verläuft. Die vorstehend erwähnte Rückwärtsbewegung des Endes 12a des Greiferteils 11 ist demnach bei dünnen Produkten äusserst klein oder praktisch überhaupt nicht vorhanden.As mentioned, the
In der Figur 5 ist mit c die für das Ergreifen von Druckereierzeugnissen unterschiedlicher Dicke nutzbare Weite der Greiferöffnung 15 bezeichnet.In FIG. 5, c denotes the width of the
Wie aus der Figur 5 weiter ersichtlich ist, ist das Kugelgelenk 22 bzw. die durch dieses festgelegte Schwenkachse 25 des ersten Klemmteiles 11 um die Strecke a gegenüber der Schwenkachse 17' des Lagerteiles 21 nach rückwärts, d.h. in einer Richtung vom freien Ende 12a des ersten Greiferteiles 11 weg, versetzt. Auf diese Weise wird eine Verlängerung des Schenkels 12 des ersten Greiferteiles 11 in Richtung von der Angriffslinie 38 (Fig. 5) der Druckfeder 27 weg erhalten. Dies bedeutet, dass bei einer gegebenen Druckfeder 27 am freien Ende 12a des ersten Greiferteiles 11 grössere Klemmkräfte erzielt werden als bei einer Lösung, bei der die Schwenkachse des ersten Greiferteiles 11 mit der Schwenkachse 17' des Lagerteiles 21 zusammenfällt. Zur Erhöhung dieser Klemmkräfte muss also nicht der zwischen der Kraftangriffslinie 38 der Druckfeder 27 und dem freien Ende 12a liegende Teil des Schenkels 12 des ersten Greiferteiles 11 verlängert werden, was eine kompakte Bauweise mit möglichst kurzen Greiferschenkeln 12, 14 ermöglicht.As can also be seen from FIG. 5, the ball joint 22 or the
Durch das Trennen der einen Schwenkachse 25 für den ersten Greiferteil 11 von der andern Schwenkachse 17' für den Lagerteil 21 wird mehr Freiheit in der Ausgestaltung des Schwenklagers 22 des ersten Greiferteiles 11 gewonnen. So kann wie bereits erwähnt dieses Schwenklager als Kugelgelenk 22 ausgebildet werden, das wie erläutert ein gewisses Kippen des ersten Greiferteiles 11 um seine Längsachse 26 (siehe Fig. 2) ermöglicht. Somit kann sich der erste Greiferteil 11 in seiner Lage an ein Druckereierzeugnis P anpassen, auch wenn dieses über seine Breite unterschiedlich dick sein sollte. Das bedeutet, dass im Bereich des freien Endes 12a des ersten Greiferteiles 11 über seine ganze Breite d (Fig. 2) eine im wesentlichen gleich starke Klemmung des Druckereierzeugnisses P erfolgt, auch wenn letzteres ungleich dick ist. Somit wird ein einwandfreies Festklemmen der Druckereierzeugnisse sichergestellt.By separating the one
Zum Oeffnen der Greifer 10 und damit zum Freigeben der erfassten Druckereierzeugnisse P wird auf das Ende 31a des Verriegelungshebels 31 mittels in den Figuren nicht dargestellter Oeffnungskulissen eine Entriegelugskraft ausgeübt, welche ein Verschwenken dieses Verriegelungshebels 31 im Gegenuhrzeigersinn zur Folge hat. Das Sperrorgan 33 kann sich nun von der Rastnase 32 lösen, so dass sich der Lagerteil 21 und damit auch die Hohlwelle 17 unter der Wirkung der sich nun entspannenden Druckfeder 27 verschwenken kann.In order to open the
In Figur 6 ist ein Greifer 10 gezeigt, der in der Konstruktion dem in den Figuren 1-4 gezeigten Greifer entspricht, der jedoch in eine Position verschwenkt ist, in der die Greiferöffnung 15 in Bewegungsrichtung F des Greifers 10 gesehen vorausläuft. Aus den Darstellungen der Figuren 1 und 6 ist ersichtlich, wie gross der nutzbare Schwenkbereich ist, d.h. in welchen unterschiedlichen Positionen der Greifer 10 Druckereierzeugnisse erfassen bzw. abgeben kann.FIG. 6 shows a
Zur Figur 6 ist noch zu bemerken, dass am zweiten Greiferteil 13 im Bereich seines freien Endes 14a ein dem andern Greiferteil 11 zugekehrtes Klemmorgan 39 vorgesehen ist, das zum Festklemmen eines Druckereierzeugnisses P' dient. Das Klemmorgan 39 weist eine Klemmfläche 39a auf, die bei geschlossenem Greifer 10 dem Ende 12a des Greiferteils 11 gegenüberliegt und zu diesem etwa parallel verläuft. Das Druckereierzeugnis P' wird zwischen der Klemmfläche 39a des Klemmorganes 39 und dem freien Ende 12a des ersten Greiferteiles 11 in einer bestimmten, definierten Lage festgehalten.With regard to FIG. 6, it should also be noted that a clamping
Im folgenden wird nun noch auf einige der verschiedenen möglichen Varianten eingegangen.In the following, some of the different possible variants are discussed.
Wie bereits erwähnt verschafft das Versetzen der Schwenkachse 25 des ersten Greiferteiles 11 gegenüber der Schwenkachse 17' des Lagerteils 21 Freiheiten in der Ausgestaltung des Schwenklagers für diesen ersten Greiferteil 11. Durch die beschriebene Ausbildung dieses Schwenklagers als Kugelgelenk 22 wird wie erläutert die Möglichkeit geschaffen, dass der erste Greiferteil 11 eine gewisse Kippbewegung um seine Längsachse 26 ausführen kann. Das Schwenklager kann jedoch auch anders ausgebildet sein, um dem ersten Greiferteil 11 zu ermöglichen, neben einer Schwenkbewegung um eine im wesentlichen parallel zur Schwenkachse 17' des Lagerteiles 21 verlaufende Achse 25 auch eine Kippbewegung um die Längsachse 26 des ersten Greiferteiles 11 durchzuführen, die im wesentlichen vom Schwenklager 22 zum freien Ende 12a des ersten Greiferteiles 11 verläuft.As already mentioned, the displacement of the
Bei der in den Figuren gezeigten Ausführungsform, bei der zwischen dem Lagerteil 21 und dem ersten Greiferteil 11 eine Druckfeder 27 angeordnet ist, können die Greiferteile 11 und 13 aus Kunststoff hergestellt werden. Dabei ist es nicht erforderlich, dass die Schenkel 12, 14 der Greiferteile 11, 13 sehr biegelastisch sind. Es ist nun aber auch möglich, zumindest den Schenkel 12 des ersten Greiferteiles 11 als Biegefeder auszubilden und am Lagerteil 21 anstelle der Druckfeder 27 ein im wesentlichen unelastisches Uebertragungselement anzuordnen, das etwa in Richtung der Krafteinwirkungslinie 38 (Fig. 5) auf den Schenkel 12 des ersten Greiferteiles 11 einwirkt und diesen zuerst mitnimmt und dann am Ende des anhand der Figuren 3 und 4 beschriebenen Schliessvorganges durchbiegt, um so am freien Ende des ersten Greiferteiles 11 die gewünschte Klemmkraft zu erzeugen.In the embodiment shown in the figures, in which a
Claims (14)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CH3694/92 | 1992-12-02 | ||
| CH369492 | 1992-12-02 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0600183A1 true EP0600183A1 (en) | 1994-06-08 |
| EP0600183B1 EP0600183B1 (en) | 1997-05-21 |
Family
ID=4261526
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP93115956A Expired - Lifetime EP0600183B1 (en) | 1992-12-02 | 1993-10-02 | Conveyor gripper for conveying printed products of one or more sheets |
Country Status (15)
| Country | Link |
|---|---|
| US (1) | US5395151A (en) |
| EP (1) | EP0600183B1 (en) |
| JP (1) | JP3333610B2 (en) |
| KR (1) | KR0136248B1 (en) |
| AT (1) | ATE153307T1 (en) |
| AU (1) | AU658770B2 (en) |
| BR (1) | BR9304907A (en) |
| CA (1) | CA2110423C (en) |
| DE (1) | DE59306510D1 (en) |
| DK (1) | DK0600183T3 (en) |
| ES (1) | ES2101187T3 (en) |
| FI (1) | FI111239B (en) |
| NO (1) | NO180007C (en) |
| NZ (1) | NZ250324A (en) |
| RU (1) | RU2077467C1 (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1995000429A1 (en) * | 1993-06-17 | 1995-01-05 | Gämmerler Maschinenbau Und Anlagentechnik Gmbh | Newspaper conveyor |
| EP0709218A1 (en) | 1994-10-27 | 1996-05-01 | Ferag AG | Process and device for marking printed products |
| EP1661833A1 (en) | 2004-11-26 | 2006-05-31 | Ferag AG | Method and device for treating printed products |
| EP2172407A2 (en) | 2008-10-02 | 2010-04-07 | Ferag AG | Clamp element for attaching to a clamping tongue of a gripper and gripper with such a clamp element |
| EP2258645A2 (en) | 2009-06-03 | 2010-12-08 | Ferag AG | Apparatus and process for processing printing products |
| EP2386512A1 (en) | 2010-05-10 | 2011-11-16 | Ferag AG | Apparatus and process for conveying flexible flat products |
| WO2012034242A1 (en) | 2010-09-17 | 2012-03-22 | Ferag Ag | Device for transferring products to a gripper conveyor |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2117169T3 (en) * | 1993-06-29 | 1998-08-01 | Ferag Ag | INSTALLATION TO FEED PRODUCTS, SUCH AS CARDS AND ARTICLE SAMPLES, UP TO A POST OF TREATMENT AFTER. |
| US5810347A (en) * | 1994-11-21 | 1998-09-22 | Heidelberger Druckmaschinen Ag | Apparatus for gripping and conveying sheet-like products |
| US5829576A (en) * | 1996-04-12 | 1998-11-03 | Corfin Inc. | Continuous flow dip tinning system |
| DE19642117A1 (en) * | 1996-10-12 | 1998-04-16 | Koenig & Bauer Albert Ag | Clamping pliers for endless conveyors |
| DE59704238D1 (en) * | 1997-01-16 | 2001-09-13 | Ferag Ag | Method and device for processing flat printed products, such as newspapers, magazines and parts thereof |
| DK0870710T3 (en) | 1997-04-07 | 2003-12-08 | Ferag Ag | Method and apparatus for flowing out printing products from a transport stream and for forming stacks of the flowing out printing products |
| DE59806032D1 (en) | 1997-09-10 | 2002-11-28 | Ferag Ag | Device for turning products in a scale formation |
| AU755468B2 (en) | 1998-06-15 | 2002-12-12 | Ferag Ag | Apparatus for processing flexible, sheet-like products |
| JP2002528356A (en) | 1998-10-26 | 2002-09-03 | フェラーク アーゲー | Method and apparatus for transporting printed matter |
| US6227588B1 (en) * | 1999-02-17 | 2001-05-08 | Heidelberger Druckmaschinen Aktiengesellschaft | Gripper assembly |
| US6227589B1 (en) | 1999-12-01 | 2001-05-08 | Philadelphia Newspapers, Inc. | Gripper assembly for a conveying device for conveying single-sheet or multi-sheet printed products and a method for modifying the same |
| DE50003099D1 (en) * | 2000-04-19 | 2003-09-04 | Grapha Holding Ag | Device for removing printed products transported on a conveyor at regular intervals |
| DE50200768D1 (en) * | 2001-01-24 | 2004-09-16 | Ferag Ag | Method and device for gripping flat objects conveyed with grippers |
| US6705608B2 (en) * | 2002-07-01 | 2004-03-16 | Heidelberger Druckmaschinen Ag | Sheet material conveying apparatus with adjustable top grippers for pockets |
| US6851544B2 (en) * | 2003-05-19 | 2005-02-08 | Graphic Management Associates, Inc. | Transfer device |
| US7216758B2 (en) | 2003-11-13 | 2007-05-15 | Hartness International, Inc. | Conveyor with opposed spring-loaded grippers, and related conveyor link |
| US7055676B2 (en) * | 2003-11-13 | 2006-06-06 | Hartness International, Inc. | Conveyor with movable gripper and related conveyor link |
| US7207434B2 (en) | 2003-11-13 | 2007-04-24 | Hartness International, Inc. | Conveyor with center-actuatable gripper, and related conveyor link |
| US7055677B2 (en) * | 2003-11-13 | 2006-06-06 | Hartness International, Inc. | Conveyor with movable grippers, and related conveyor link |
| US7021453B2 (en) * | 2003-11-13 | 2006-04-04 | Hartness International, Inc. | Conveyor with gear mechanism gripper and related conveyor link |
| US7261199B2 (en) * | 2004-06-29 | 2007-08-28 | Hartness International, Inc. | Neck gripping conveyor and link, and related rotary filler and system |
| US7036658B2 (en) * | 2003-11-13 | 2006-05-02 | Hartness International, Inc. | Gripper conveyor with clear conveying path and related conveyor link |
| US7278531B2 (en) * | 2004-06-29 | 2007-10-09 | Hartness International, Inc. | Flexible conveyor and connection elements |
| US7264113B2 (en) | 2003-11-13 | 2007-09-04 | Hartness International, Inc. | Pivotable conveyor and link |
| US7299832B2 (en) * | 2004-06-29 | 2007-11-27 | Hartness International, Inc. | Rotary filling machine and related components, and related method |
| US7331156B2 (en) * | 2004-06-29 | 2008-02-19 | Hartness International, Inc. | System for securely conveying articles and related components |
| US7185753B2 (en) * | 2004-09-28 | 2007-03-06 | Hartness International, Inc. | Shuttle conveyor |
| CH704642B1 (en) * | 2005-01-21 | 2012-09-28 | Ferag Ag | Apparatus for trimming of flexible, flat products. |
| DE102005048754B4 (en) * | 2005-10-10 | 2007-08-23 | Neusser Druckerei Und Verlag Gmbh | Cleaning apparatus for grippers of a transport system for printed products |
| US7530564B2 (en) * | 2006-07-10 | 2009-05-12 | Goss International Americas, Inc. | Opposing link gripper |
| CH704596A1 (en) | 2011-03-10 | 2012-09-14 | Ferag Ag | Cleaning apparatus for a conveyor. |
| KR101308487B1 (en) * | 2011-09-01 | 2013-09-25 | 주식회사신도리코 | Apparatus for clamping paper of office machine |
| IT201900008817A1 (en) * | 2019-06-13 | 2020-12-13 | Gd Spa | Transport system for a cartridge, in particular for an electronic cigarette, at least partially complete. |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4381056A (en) * | 1980-02-08 | 1983-04-26 | Ferag Ag | Conveyor apparatus, especially for printed products |
| US4953847A (en) * | 1988-03-03 | 1990-09-04 | Ferag Ag | Method of and apparatus for outfeeding printed products arriving in an imbricated formation |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU421183B2 (en) * | 1967-08-11 | 1972-02-07 | Miller Printing Machinery Co | Apparatus for handling sheets |
| DE2337210A1 (en) * | 1973-07-21 | 1975-02-06 | Maschf Augsburg Nuernberg Ag | Clamping equipment for sheet handling - movable clamping fingers self locked in open position |
| CH636824A5 (en) * | 1979-03-08 | 1983-06-30 | Ferag Ag | CONVEYOR FOR FLAT PRODUCTS, ESPECIALLY PRINTED PRODUCTS. |
| DE3570228D1 (en) * | 1984-09-07 | 1989-06-22 | Bell & Howell Co | Apparatus for inserting sheets |
| DE3519293A1 (en) * | 1985-05-30 | 1986-12-04 | Koenig & Bauer AG, 8700 Würzburg | GRIPPER SYSTEM |
| US4681213A (en) * | 1985-10-23 | 1987-07-21 | Harris Graphics Corporation | Gripper assembly |
| US4638906A (en) * | 1985-11-19 | 1987-01-27 | Harris Graphics Corporation | Conveyor assembly |
| US4746007A (en) * | 1986-02-20 | 1988-05-24 | Quipp Incorporated | Single gripper conveyor system |
| CH683913A5 (en) * | 1987-10-23 | 1994-06-15 | Ferag Ag | Feed for continuously accumulating fabrics, in particular printed products. |
| US4921294A (en) * | 1988-06-03 | 1990-05-01 | Am International Incorporated | Spring wire gripper jaw |
| CH677652A5 (en) * | 1989-03-07 | 1991-06-14 | Grapha Holding Ag | |
| US4968081A (en) * | 1989-03-13 | 1990-11-06 | Hall Processing Systems | Non-contact actuator |
| ATE108746T1 (en) * | 1989-11-08 | 1994-08-15 | Grapha Holding Ag | CLAMPS FOR CHAIN CONVEYOR. |
| US5188349A (en) * | 1991-10-07 | 1993-02-23 | Ferag Ag | Method and apparatus for inserting printed products in a folded main product |
-
1993
- 1993-10-02 DK DK93115956.0T patent/DK0600183T3/en active
- 1993-10-02 EP EP93115956A patent/EP0600183B1/en not_active Expired - Lifetime
- 1993-10-02 DE DE59306510T patent/DE59306510D1/en not_active Expired - Lifetime
- 1993-10-02 AT AT93115956T patent/ATE153307T1/en active
- 1993-10-02 ES ES93115956T patent/ES2101187T3/en not_active Expired - Lifetime
- 1993-10-11 AU AU48940/93A patent/AU658770B2/en not_active Expired
- 1993-11-17 KR KR1019930024523A patent/KR0136248B1/en not_active IP Right Cessation
- 1993-11-22 NO NO934222A patent/NO180007C/en not_active IP Right Cessation
- 1993-11-26 JP JP29688493A patent/JP3333610B2/en not_active Expired - Fee Related
- 1993-11-29 US US08/158,616 patent/US5395151A/en not_active Expired - Lifetime
- 1993-11-30 NZ NZ250324A patent/NZ250324A/en not_active IP Right Cessation
- 1993-12-01 FI FI935383A patent/FI111239B/en not_active IP Right Cessation
- 1993-12-01 RU RU9393053896A patent/RU2077467C1/en active
- 1993-12-01 CA CA002110423A patent/CA2110423C/en not_active Expired - Lifetime
- 1993-12-01 BR BR9304907A patent/BR9304907A/en not_active IP Right Cessation
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4381056A (en) * | 1980-02-08 | 1983-04-26 | Ferag Ag | Conveyor apparatus, especially for printed products |
| US4381056B1 (en) * | 1980-02-08 | 1989-07-25 | ||
| US4953847A (en) * | 1988-03-03 | 1990-09-04 | Ferag Ag | Method of and apparatus for outfeeding printed products arriving in an imbricated formation |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1995000429A1 (en) * | 1993-06-17 | 1995-01-05 | Gämmerler Maschinenbau Und Anlagentechnik Gmbh | Newspaper conveyor |
| US5575379A (en) * | 1993-06-17 | 1996-11-19 | Gammerler Maschinenbau Und Anlagentechnik Gmbh | Newspaper conveyor |
| EP0709218A1 (en) | 1994-10-27 | 1996-05-01 | Ferag AG | Process and device for marking printed products |
| EP1661833A1 (en) | 2004-11-26 | 2006-05-31 | Ferag AG | Method and device for treating printed products |
| EP2172407A2 (en) | 2008-10-02 | 2010-04-07 | Ferag AG | Clamp element for attaching to a clamping tongue of a gripper and gripper with such a clamp element |
| US8220853B2 (en) | 2008-10-02 | 2012-07-17 | Ferag Ag | Clamping element for fitting on a clamping tongue of a gripper as well as gripper fitted with such a clamping element |
| EP2258645A2 (en) | 2009-06-03 | 2010-12-08 | Ferag AG | Apparatus and process for processing printing products |
| US8777221B2 (en) | 2009-06-03 | 2014-07-15 | Ferag Ab | Device and method for processing printing products |
| EP2386512A1 (en) | 2010-05-10 | 2011-11-16 | Ferag AG | Apparatus and process for conveying flexible flat products |
| US8550460B2 (en) | 2010-05-10 | 2013-10-08 | Ferag Ag | Apparatus and method for transporting flexible, planar products |
| WO2012034242A1 (en) | 2010-09-17 | 2012-03-22 | Ferag Ag | Device for transferring products to a gripper conveyor |
Also Published As
| Publication number | Publication date |
|---|---|
| NO934222D0 (en) | 1993-11-22 |
| RU2077467C1 (en) | 1997-04-20 |
| KR950013942A (en) | 1995-06-15 |
| ES2101187T3 (en) | 1997-07-01 |
| FI111239B (en) | 2003-06-30 |
| AU658770B2 (en) | 1995-04-27 |
| KR0136248B1 (en) | 1998-04-30 |
| DE59306510D1 (en) | 1997-06-26 |
| ATE153307T1 (en) | 1997-06-15 |
| FI935383A (en) | 1994-06-03 |
| AU4894093A (en) | 1994-06-16 |
| BR9304907A (en) | 1994-06-07 |
| NZ250324A (en) | 1995-09-26 |
| FI935383A0 (en) | 1993-12-01 |
| CA2110423A1 (en) | 1994-06-03 |
| JP3333610B2 (en) | 2002-10-15 |
| JPH06210832A (en) | 1994-08-02 |
| NO180007C (en) | 1997-01-29 |
| NO180007B (en) | 1996-10-21 |
| EP0600183B1 (en) | 1997-05-21 |
| NO934222L (en) | 1994-06-03 |
| US5395151A (en) | 1995-03-07 |
| CA2110423C (en) | 1999-09-14 |
| DK0600183T3 (en) | 1997-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0600183B1 (en) | Conveyor gripper for conveying printed products of one or more sheets | |
| DE69302333T2 (en) | Pliers with movable jaws for gripping bottles or the like, preferably for automatic dishwashing / sterilizing machines | |
| EP0557680B1 (en) | Conveyor gripper for conveying printed products of one or more sheets | |
| EP0664256A1 (en) | Tensioning and closing tool for securing a thermoplastic strapping around an object | |
| CH644816A5 (en) | CONVEYING DEVICE, PARTICULAR FOR PRINTED PRODUCTS, WITH GRIPPERS ANCHORED ON A CIRCULAR ZUGORGAN. | |
| AT516391B1 (en) | Ejecting device for a movable furniture part | |
| EP0823223B1 (en) | Pretensioner-proof buckle for seatbelts | |
| EP0581020B1 (en) | Device for tensioning at least one profiled strap around at least one tubular body | |
| EP0272469B1 (en) | Grippers for a printing machine | |
| EP0655982B1 (en) | Newspaper conveyor | |
| EP0557679B1 (en) | Conveyor gripper for conveying printed products of one or more sheets | |
| EP3964461B1 (en) | Clamp device for holding a container and container treatment device | |
| EP1413398B1 (en) | Rapid securing device with locking device | |
| DE10323171B4 (en) | Welding head for a band strapping machine | |
| DE19542518A1 (en) | Transport star for vessels | |
| DE68915452T2 (en) | BOW TRANSPORT DEVICE WITH GRIPPER. | |
| DE4123476A1 (en) | FILM STRETCHER FOR SHRINKING FILMS | |
| DE29914764U1 (en) | Pliers | |
| DE2753637C3 (en) | Movable thread clamp | |
| DE69313490T2 (en) | Gripper conveyor | |
| DE4036882C1 (en) | Holding clamp for flat objects etc. - has clamp shank(s) with holding arm integrally coupled to stop arm with junction at transition point | |
| DE3013854A1 (en) | CHAIN GEAR WITH AUTOMATIC ROPE LENGTH COMPENSATION | |
| EP0931010B1 (en) | Clamping claw for an endless conveyer | |
| EP0301244A1 (en) | Device for inserting at least one insert in printed products | |
| EP1040065B1 (en) | Clamp for holding flat objects |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH DE DK ES FR GB IT LI NL SE |
|
| 17P | Request for examination filed |
Effective date: 19940610 |
|
| 17Q | First examination report despatched |
Effective date: 19950905 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH DE DK ES FR GB IT LI NL SE |
|
| REF | Corresponds to: |
Ref document number: 153307 Country of ref document: AT Date of ref document: 19970615 Kind code of ref document: T |
|
| ITF | It: translation for a ep patent filed | ||
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: PATENTANWAELTE SCHAAD, BALASS, MENZL & PARTNER AG Ref country code: CH Ref legal event code: EP |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 19970522 |
|
| REF | Corresponds to: |
Ref document number: 59306510 Country of ref document: DE Date of ref document: 19970626 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2101187 Country of ref document: ES Kind code of ref document: T3 |
|
| ET | Fr: translation filed | ||
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PFA Owner name: FERAG AG Free format text: FERAG AG#ZUERICHSTRASSE 74#CH-8340 HINWIL (CH) -TRANSFER TO- FERAG AG#PATENTABTEILUNG Z. H. MARKUS FELIX ZUERICHSTRASSE 74#8340 HINWIL (CH) |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DK Payment date: 20121022 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20121023 Year of fee payment: 20 Ref country code: CH Payment date: 20121227 Year of fee payment: 20 Ref country code: BE Payment date: 20121022 Year of fee payment: 20 Ref country code: FR Payment date: 20121031 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20121026 Year of fee payment: 20 Ref country code: SE Payment date: 20121019 Year of fee payment: 20 Ref country code: GB Payment date: 20121019 Year of fee payment: 20 Ref country code: ES Payment date: 20121026 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20121019 Year of fee payment: 20 Ref country code: AT Payment date: 20121011 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 59306510 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 59306510 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: EUP Effective date: 20131002 Ref country code: DK Ref legal event code: EUP |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: V4 Effective date: 20131002 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: PE20 Expiry date: 20131001 |
|
| BE20 | Be: patent expired |
Owner name: *FERAG A.G. Effective date: 20131002 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK07 Ref document number: 153307 Country of ref document: AT Kind code of ref document: T Effective date: 20131002 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20131001 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20131003 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20140925 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20131003 |