EP0381914A2 - Automatic bag dispenser - Google Patents
Automatic bag dispenser Download PDFInfo
- Publication number
- EP0381914A2 EP0381914A2 EP89810987A EP89810987A EP0381914A2 EP 0381914 A2 EP0381914 A2 EP 0381914A2 EP 89810987 A EP89810987 A EP 89810987A EP 89810987 A EP89810987 A EP 89810987A EP 0381914 A2 EP0381914 A2 EP 0381914A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- bag
- bags
- fingers
- strip
- bellows
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H35/00—Delivering articles from cutting or line-perforating machines; Article or web delivery apparatus incorporating cutting or line-perforating devices, e.g. adhesive tape dispensers
- B65H35/10—Delivering articles from cutting or line-perforating machines; Article or web delivery apparatus incorporating cutting or line-perforating devices, e.g. adhesive tape dispensers from or with devices for breaking partially-cut or perforated webs, e.g. bursters
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47F—SPECIAL FURNITURE, FITTINGS, OR ACCESSORIES FOR SHOPS, STOREHOUSES, BARS, RESTAURANTS OR THE LIKE; PAYING COUNTERS
- A47F9/00—Shop, bar, bank or like counters
- A47F9/02—Paying counters
- A47F9/04—Check-out counters, e.g. for self-service stores
- A47F9/042—Shopping bags or carton-dispensing systems therefor
- A47F9/043—Shopping bags or carton-dispensing systems therefor with mechanical action
Definitions
- the present invention relates to distribution systems for plastic bags used in food sales areas.
- the apparatus, object of the present invention is composed of a bag storage system "A”, of a system for spacing the walls of the bags "B”, of a system for gripping the bags by the handles "C” and a bag detachment system "D".
- the bag storage system "A” uses a known principle generally used for small bags without handles:
- the bags are interconnected and detachable by traction. They form a continuous strip presented in a roll 1 (fig. 1).
- the roller is arranged on an axis 2 and unwinds freely by pulling on the strip 3.
- the bag wall spacing system "B" comprises two plates 4 and 5 arranged on each side of the strip 3 so that this strip can move freely between the plates 4 and 5 with reduced play.
- a bell 6 seals with a fan 7, so that the operation of the fan 7 causes a vacuum inside the bell 6.
- Each plate 4 and 5 is pierced with holes intended for cause the suction of one of the walls of the bag against each plate and the maintenance against the latter when the fan 7 is running.
- Figure 2 shows a top view of the plate 4.
- the holes 8 are distributed on the plate so as to ensure a distribution according to the shape of the bag and more or less pronounced depending on the places of the bag where it is necessary to have a correct maintenance.
- the plates 4 and 5 are movable in such a way that their displacement causes the separation of the walls of the bag when these are held by suction against the plates.
- the plates 4 and 5 are articulated around two axes 9 and 10, arranged perpendicular to the travel of the strip 3 and as close as possible to the latter.
- Other technically known embodiments can be used to guide the mobility of the plates 4 and 5 and in particular solutions without an axis.
- the movement of plates 4 and 5 can be controlled in different ways. In one embodiment of the invention, according to FIGS.
- the plates 4 and 5 are separated by the known mechanism of the "connecting rod-crank" type.
- An electric geared motor 11 drives, by successive U-turns, a rotary plate 12, comprising an eccentric drive axis.
- Two rods 13 connect the axis of the plate to the bells 6.
- Figure 3 shows the system in the rest position.
- the plates 4 and 5 are against the strip of bags 3.
- the operation of the fans 7 causes the suction of the walls of a bag against the plates 4 and 5.
- the U-turn of the plate 12 causes the spacing of the plates 4 and 5 and therefore that of the walls of the bag ( Figure 4).
- the plates 4 and 5 are connected to the bells 6 by bellows 14 made, for example, of canvas or elastic plastic film.
- FIG. 5 shows the system in the rest position.
- the natural elasticity of the bellows keeps the plates 4 and 5 against the strip of bags 3.
- the starting of the fans 7 causes, firstly the immediate aspiration of the walls of the bag against the plates 4 and 5, and then the displacement of the plates towards the bells 6.
- the displacement of the plates is done with a slight delay time compared to the suction of the walls of the bag because of the volume of the bellows 14 to be emptied. In all cases, the goal is to slightly separate the walls of the bag at the handles so that the gripping fingers 15 can penetrate the side of the handles.
- the gripping system “C” ensures the introduction of the fingers 15 into the handles of the bag, the displacement of this bag towards the position of use, and the spacing of the fingers 15 to present this bag open to the user, and this at loading height.
- the gripping system "C” On each side of the bag, at the handles half-opened by the spacing system "B" (fig. 7 and 8), the gripping system “C” has two fingers 15, parallel and arranged one against the other, and then introduces them into the handles of the bag.
- the gripping system then ensures the transfer of the bag to the position of use for customers. During the transfer operation, the gripping system ensures a different movement of the two fingers on the same side, so that they move away from each other, in order to open the bag as much as possible possible and authorized by the shape of the bag handles.
- FIG. 7 shows an operating cycle of the "rectangular" type, using four rectilinear movements.
- the movement AB ensures the introduction of the two pairs of fingers 15 into each bag handle.
- the movement BC ensures the routing of the bag to the position of use.
- FIG. 8 shows an example of an "triangular" type operating cycle, with two curvilinear movements and one rectilinear movement.
- the two movements AC can be carried out, for example, by rotation around two different axes, or by rotation around the same axis but with different angles of rotation.
- the fingers are removed during the return stroke CA to the start and rest point.
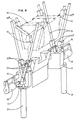
- FIG. 9 shows a technical embodiment corresponding to the cycle of FIG. 7.
- a fixed slide 16 allows the transverse guiding of two carriages 17.
- Two electric jacks 18 ensure the lateral movement of the carriages 17.
- This arrangement allows the two strokes AB and CD of Figure 7, corresponding to the introduction of the fingers into the handles of the bag and their removal.
- On each carriage two bars 19 are arranged in a vertical plane and ensure the guiding of two slides 20 each supporting a finger 15.
- the arrangement of the bars 19 is such that when the slides are in the low position 20A, the fingers 15 are joined , and that when the slides are in the high position 20B, the fingers 15 are sufficiently apart to open the bag.
- An electric actuator 21, integral with each carriage 17 ensures, by means of links 22, the raising and lowering of the slides 20, that is to say the movements BC and DA of FIG. 7.
- FIGS 10, 11, 12 and 13 show another embodiment of the invention using only curvilinear movements and a "rectangular" cycle.
- a chassis 23 supports two fixed ball joints 24. On each of the ball joints 24 a double arm can oscillate in all directions. These double arms consist of a main arm 25 and a secondary arm 26 articulated on the first, around the ball 24, and in such a way that it always remains in the same plane as the main arm 25.
- Each arm 25 and 26 supports a gripping finger 15 disposed on an identical radius. Opposite the fingers 15, each arm is equipped with a ball joint 27, the ball joint of the arm 26 being disposed on a shorter radius than for the ball joint of the arm 25.
- a gear motor 28 drives by successive U-turns a crank 29 carrying an axis 30.
- Two rods 31 and 32 connect the arm ball joints 27 and the crank axis 30.
- the arrangement of the elements is such that the two fingers 15 are one near each other and at the handles of the bag ajar by the spacer system "B".
- the gear motor 28 makes a U-turn
- the traction on the links 31 and 32 drives the arms 25 and 26 differently since the action radii of the ball joints 27 are different.
- the secondary arm 26 moves more than the main arm 25.
- each double arm is equipped with another ball joint 33, located on an axis perpendicular to the plane of the arms and passing through the axis of the main ball joint 24.
- An electric geared motor 34 drives by successive U-turns a plate 35 equipped with an axis 36.
- Figures 10 and 12 show the two positions obtained at each U-turn of the gear motor 35: the fingers are separated in FIG. 10 and introduced into the handles of the bag in FIG. 12. The combination of the two motor-reducers makes it possible to carry out a "rectangular" cycle.
- Figures 10, 11 show the device in the rest position. The fingers are spread apart and located at the level of the bag handles.
- the gear motor 35 then performs a half-turn (stroke AB of FIG. 7), to introduce the fingers into the handles of the bag (FIG. 12). Then the gear motor 28 performs a half-turn in turn (stroke BC of FIG. 7). The arms 25 and 26 are then raised to the position of use and the fingers 15 are separated to open the bag as much as possible ( Figure 13). To return to the rest position, the gear motor 35 performs a new U-turn causing the fingers to withdraw ( Figure 10), and the gear motor 28 also performs a new U-turn, bringing the arms back to the low position ( figure 11).
- the regulation of the operating cycle is entrusted to a simple and conventional electronic card, the end positions of the geared motors being ensured by contactors, detectors or commercial cells.
- the gripping system always returns from the position of use to the rest position by making the reverse movements (CD and DA of FIG. 7, CA of FIG. 8 ).
- This return operation represents 50% of the device's operating time. It represents a precious waste of time and an unnecessary source of wear and tear on the device.
- curvilinear movements it is therefore advantageous to extend these movements after the final position of use in order to close them completely and thus return to the starting position.
- the use of rotary movements, multiple or submultiples of 360 °, allows for rotary cycles like the one shown in fig 14. The cycle always remains “rectangular", but has the advantage of always having the same direction of rotation , and symmetry in the vertical plane.
- FIGS. 15 and 16 show an application of this type of operation, with a double gripping system ("C1" and "C2).
- a chassis 38 (FIG. 15) supports two fixed bearings 39. These two bearings allow two shafts 40 to rotate coaxially.
- a geared motor 41 drives, thanks to two small pulleys 42 and two positive drive belts 43 (toothed belts, chains), two large pulleys 44 integral with the shafts 40.
- the shafts 40 drive in rotation, in turn, two supports 45.
- each support On each support, four ball joints 46 allow the articulation in all directions of two arms 47 for the first gripping system "C1", and two opposite arms 48 for the second system of "C2" gripping.
- Each arm is provided with a gripping finger 15.
- a first holding is provided by each connecting rod 49 articulated between the fixed bearing 39 and the ball joint 50 secured to the arm 47.
- FIG. 16 represents the system "C1" in the position of use by the customers and consequently in the position of introduction into the bag handles.
- the UV ramps direct the rollers 51 towards the outside of the system and cause the arms 48 to pivot and the fingers to be inserted into the bag handles.
- the UV ramps For the finger insertion operation to be rapid, it is advisable to place the UV ramps just before the low position and to tilt the ramps sharply so that this operation is sufficiently abrupt. In this way, the rotational movement of the fingers is negligible compared to the size of the opening of the handles.
- the groove portions are circular to keep the arms and fingers in the same lateral position during rotation.
- Figure 15 shows the general arrangement of the device in the rest position. In this representation, the spacing system "B" is horizontal and in the lower part of the device.
- the bag detachment system "D" is intended to brake the bag strip 3 during the transfer of the last bag by the gripping system "C” to the position of use.
- the bags being detachable by simple pulling thanks to a rupture line between each bag, the fact of temporarily blocking the running of the band during the transfer operation, causes the rupture of this band and the detachment of a bag.
- Several technological solutions, industrially known, can be used to perform this operation. They basically use two different principles: grip and obstacle.
- Figures 17 and 18 show an exemplary embodiment using the principle of adhesion.
- a roller 54 is arranged perpendicular to the direction of travel of the strip 3. To obtain maximum adhesion, this roller is coated with rubber.
- the strip of bags 3 circulates around this roller.
- a small pressure roller 55 exerts an additional force and makes it possible to have a maximum winding angle.
- This small roller 55 can, for example be mounted on an articulated arm 56, stretched by a spring 57.
- the roller 54 is integral with an axis 58 which can rotate freely between two bearings 59, integral with the chassis 60.
- a rotation braking device 61 fixed on the chassis 60, is centered on the axis 58 of which it is integral in rotation. This braking device is commonly sold in the industry as a mechanical construction component.
- FIGs 19, 20 and 21 show an embodiment of the detachment system "D" using the principle of the obstacle.
- the strip of bags 3 having alveoli at the level of the handles and between them, it suffices to introduce a hook or any other mechanical part obstructing, in this alveolus, at the opportune moment of movement of the strip to cause the stop of this strip and the detachment of the first bag.
- the embodiment shown uses a double hook 62, articulated on a fixed axis 63 and controlled by an electromagnet 64 or any other movement system known industrially.
- the hook 62 is positioned just upstream of the spacer system "B".
- FIG. 19 represents the moment when the gripping system "C" has just grasped the waiting bag, ajar by the spacing system "B".
- the hook 62 is raised by the electromagnet 64 and allows the strip of bags 3 to run. As in the adhesion system, the electromagnet is actuated in the other direction at the precise moment when the next bag is in the correct position in the spacer system "B".
- Figure 20 and its top view 21 show the moment when the hook 62 is lowered into the pocket of a bag. The strip of bags 3 is then stopped, and the first bag is detached from this strip by pulling the fingers 15 of the gripping system "C”. The hook 62 will be raised after the spacer system "B" is in action, that is to say when the new bag is held against the plates of this system.
- Another embodiment of the detachment system "D" is shown in FIGS. 22 and 23.
- This particular embodiment of the invention uses the principle of the obstacle and aims to integrate it into the spacing system "B", using his depression energy.
- This embodiment uses the bellows system described on page 3 and shown in FIGS. 5 and 6.
- the fans 7 have not been shown. Only remains the hole 65 for the housing of the fan on the bell 6.
- the bell 6 of the upper bellows has a prominence intended to allow the movement of another blast system and located inside the first.
- the honeycomb plate 5 is cut into a U shape to receive another plate 66 articulated on the same axis 10 as the plate 5.
- a small bellows 67 provides sealing between the plate 5 and the plate 66 by allowing the latter to travel .
- the plate 66 has a hook 68 to act as an obstacle, coming to be housed in the cells of the bags.
- the lower honeycomb plate 4 has a hollow 69 intended to receive the hook 68 when the latter is lowered.
- FIG. 22 represents the position where the fingers 15 come to penetrate inside the bag handles (cycle AB). The fans are in action and provide a vacuum inside the bellows. The plates 4 and 5 are therefore spaced apart and likewise, the plate 66 is attracted towards the bottom of the bell 6, causing the hook 68 to be raised and the bag released.
- the gripping system "C" drives the bag with his fingers 15, the fans 7 are then cut. But as it takes a while to fill the bellows with air, the hook 68 is released after the bag is driven.
- FIG. 24 shows an embodiment according to an autonomous version of the device, as it can be produced at present, by placing itself next to the checkout counters.
- FIG. 25 shows a future embodiment of the invention with integration into the checkout unit.
- Figure 26 shows the detail of the internal arrangement of the elements for the chosen example.
- a piece of furniture 70 made of sheet metal and serving as a frame, includes a storage system "A”, a spacing system "B”, a double gripping system “C”, and a detachment system "D”.
- a disc 71 fixed on the support 45 and rotating with the latter, protects the mechanism of the gripping system by letting only the fingers appear outside.
- the device is completely open on the front face, between the systems gripping.
- a cover 72 located in the bottom of the opening protects the detachment system and the spacing system. It also allows, by its slope, to evacuate to the outside the objects that could fall during the loading operation.
- the cover 72 is articulated around an axis 73 and can be raised to allow access to the interior in order to be able to carry out maintenance and loading of the rollers.
- a photoelectric cell 74 In addition to the conventional end-of-travel control or presence detection devices necessary to carry out the operating cycle, the automatic starting of the device is ensured by a photoelectric cell 74. This cell is placed in the axis of the bag offered, preferably upwards, and checks for the presence of a bag offered to customers. In this way, the use of the device becomes very simple and fully automatic.
- the operating cycle is as follows: - In the rest position, a bag is offered to customers, another bag is in position in the spacing system, with the fingers 15 of the gripping system inserted. The fans are in service and the brake cut. - Removal of the free bag causes the engine to start and the second bag to drive. The ventila teurs are cut. The brake remains off. - The movement of the gripping system activates a detector.
- the brake is applied and causes the bag to detach.
- the fans remain off.
- the engine remains in operation.
- the movement of the gripping system activates another detector.
- the engine stops by positioning the open bag in the use position.
- the fans are turned on and the third bag is ajar.
- the brake is released.
- the cycle begins each time the bag is removed.
Landscapes
- Supplying Of Containers To The Packaging Station (AREA)
- Auxiliary Devices For And Details Of Packaging Control (AREA)
Abstract
Description
La présente invention concerne les systèmes de distribution des sacs en plastique utilisés dans les surfaces de vente alimentaire.The present invention relates to distribution systems for plastic bags used in food sales areas.
L'usage des sacs en polyéthylène s'est généralisé au sein des grandes surfaces de distribution, nécessitant une opération supplémentaire de distribution de ces sacs effectuée par la caissiére. La quantité de sacs distribués par jour étant trés importante, il était judicieux d'inventer un appareil automatique pour éffectuer cette distribution. D'autre part, la généralisation des caisses à lecture rapide par scanner a entrainé une augmentation importante du débit de ces caisses, ne laissant plus le temps au client de ranger les produits achetés dans les sacs. Ce dernier doit, en effet, ouvrir le sac dont les parois sont souvent collées, tenir le sac ouvert d'une main et charger ses achats de l'autre main. Il était donc judicieux d'apporter à ces problèmes un asservissement par l'utilisation d'un appareil distribuant automatiquement les sacs, mais aussi capable d'offrir à la clientèle les sacs ouverts et de les maintenir ouverts durant le temps de chargement, et ce à hauteur de chargement.The use of polyethylene bags has become widespread within large distribution areas, requiring an additional operation of distribution of these bags carried out by the cashier. The quantity of bags distributed per day being very important, it was wise to invent an automatic device to carry out this distribution. On the other hand, the generalization of fast-reading boxes by scanner has led to a significant increase in the throughput of these boxes, leaving no time for the customer to store the products purchased in the bags. The latter must, in fact, open the bag whose walls are often glued, hold the open bag with one hand and load his purchases with the other hand. It was therefore judicious to bring to these problems a subjugation by the use of a device automatically distributing the bags, but also able to offer to the customers the opened bags and to keep them open during the loading time, and this at loading height.
Il n'éxiste pas, à l'heure actuelle, d'appareil offrant la possibilité de distribuer ces sacs et de les offrir ouverts à la clientèle.At the present time, there is no device offering the possibility of distributing these bags and offering them open to customers.
L'appareil, objet de la présente invention, est composé d'un système de stockage des sacs "A", d'un système d'écartement des parois des sacs "B", d'un système de prèhension des sacs par les anses "C" et d'un système de détachement des sacs "D".The apparatus, object of the present invention, is composed of a bag storage system "A", of a system for spacing the walls of the bags "B", of a system for gripping the bags by the handles "C" and a bag detachment system "D".
Le système de stockage des sacs "A" utilise un principe connu et généralement utilisé pour les petits sacs dépourvus d'anses: Les sacs sont reliés entre eux et détachables par traction. Ils forment une bande continue se présentant selon un rouleau 1 (fig. 1). Le rouleau est disposé sur un axe 2 et se déroule librement par traction sur la bande 3.The bag storage system "A" uses a known principle generally used for small bags without handles: The bags are interconnected and detachable by traction. They form a continuous strip presented in a roll 1 (fig. 1). The roller is arranged on an
Le système d'écartement de parois de sac "B" comporte deux plaques 4 et 5 disposées de chaque coté de la bande 3 de telle maniére que cette bande puisse circuler librement entre les plaques 4 et 5 avec un jeu réduit. Sur chaque plaque 4 et 5 une cloche 6 assure l'étanchéité avec un ventilateur 7, de telle maniére que le fonctionnement du ventilateur 7 provoque une dépression à l'intérieur de la cloche 6. Chaque plaque 4 et 5 est percée de trous destinés à provoquer l'aspiration de l'une des parois du sac contre chaque plaque et le maintien contre celle-ci lorsque le ventilateur 7 est en marche. La figure 2 montre une vue de dessus de la plaque 4. Les trous 8 sont répartis sur la plaque de maniére à assurer une répartition selon la forme du sac et plus ou moins prononcée selon les endroits du sac ou il est nécessaire d'avoir un maintien correct. Les plaques 4 et 5 sont mobiles de telle maniére que leur déplacement provoque l'écartement des parois du sac lorsque celles-ci sont maintenues par aspiration contre les plaques. L'opération d'écartement des parois du sac étant destinée à la préhension de ce sac, elle doit se faire au niveau des anses du sac, comme le montre la répartition des trous sur la figure 2. Dans les réalisations représentées de l'invention (fig. 3 à 6), les plaques 4 et 5 sont articulées autour de deux axes 9 et 10, disposés perpendiculairement au défilement de la bande 3 et le plus prés possible de celle-ci. Bien entendu, d'autres réalisations techniquement connues peuvent être utilisées pour assurer le guidage de la mobilité des plaques 4 et 5 et notamment des solutions sans axe. Le déplacement des plaques 4 et 5 peut être commandé de différentes façons. Dans une réalisation de l'invention, selon les figures 3 et 4, les plaques 4 et 5 sont écartées par le mécanisme connu du type "bielle-manivelle". Un moto-réducteur électrique 11 entraine par demi-tours successifs un plateau rotatif 12, comportant un axe d'entrainement excentré. Deux biellettes 13 relient l'axe du plateau aux cloches 6. La figure 3 montre le système en position de repos. Les plaques 4 et 5 sont contre la bande de sacs 3. La mise en marche des ventilateurs 7 provoque l'aspiration des parois d'un sac contre les plaques 4 et 5. Le demi-tour du plateau 12 provoque l'écartement des plaques 4 et 5 et par conséquent celui des parois du sac (figure 4). Dans une autre réalisation de l'invention (figures 5 et 6), les plaques 4 et 5 sont reliées aux cloches 6 par des soufflets 14 réalisés, par exemple, en toile ou en film plastique élastique. Elles sont toujours articulées autour des axes 10, perpendiculairement au défilement de la bande de sacs 3. La figure 5 montre le système en position de repos. L'élasticité naturelle des soufflets maintient les plaques 4 et 5 contre la bande de sacs 3. La mise en marche des ventilateurs 7 provoque, dans un premier temps l'aspiration immédiate des parois du sac contre les plaques 4 et 5, et ensuite le déplacement des plaques vers les cloches 6. Le déplacement des plaques se fait avec un léger temps de retard par rapport à l'aspiration des parois du sac à cause du volume des soufflets 14 à vider. Dans tous les cas de figure, le but est d'écarter légérement les parois du sac au niveau des anses afin de pouvoir faire pénétrer des doigts de préhension 15 par le coté des anses.The bag wall spacing system "B" comprises two
Le système de préhension "C" assure l'introduction des doigts 15 dans les anses du sac, le déplacement de ce sac vers la position d'utilisation, et l'écartement des doigts 15 pour présenter ce sac ouvert à l'utilisateur, et ce, à hauteur de chargement. De chaque coté du sac, au niveau des anses entrouvertes par le système d'écartement "B" (fig. 7 et 8), le système de préhension "C" vient présenter deux doigts 15, paralléles et disposés l'un contre l'autre, et ensuite les introduit dans les anses du sac. Le système de préhension assure ensuite le transfert du sac vers la position d'utilisation pour la clientèle. Pendant l'opération de transfert, le système de préhension assure un déplacement différent des deux doigts d'un même coté, de maniére à ce qu'ils s'écartent l'un de l'autre, afin d'ouvrir le sac au maximum possible et autorisé par la forme des anses des sacs. Pour éffectuer les fonctions du système de préhension "C", il est possible d'utiliser différentes solutions techniques industriellement connues, à bases de composants assurant des déplacements linéaires, curvilignes ou rotatifs. Les figures 7 et 8 montrent deux exemples de cycles de fonctionnement techniquement réalisables pour effectuer les mouvements nécessaires. Dans ces deux exemples, le choix d'implantation des organes a porté sur une disposition "verticale" du système d'écartement "B", dans le simple but d'exposer ici un maximum de réalisations techniques de l'invention. La figure 7 montre un cycle de fonctionnement de type "rectangulaire", utilisant quatre mouvements rectilignes. Le mouvement AB assure l'introduction des deux paires de doigts 15 dans chaque anse de sac. Le déplacement BC assure l'acheminement du sac vers la position d'utilisation On notera que l'écartement des chemins parcourus permet d'ouvrir le sac au maximum. Le mouvement CD permet le retrait des doigts et le mouvement DA termine le cycle en ramenant les doigts en position de départ et de repos. Dans la représentation de la figure 7, les mouvements utilisés sont rectilignes, mais il est possible aussi d'utiliser des mouvements curvilignes. La figure 8 montre un exemple de cycle de fonctionnement de type "triangulaire", avec deux mouvements curvilignes et un mouvement rectiligne. Pour obtenir l'écartement des doigts, les deux mouvements AC peuvent être réalisés, par exemple, par rotation autour de deux axes différents, ou par rotation autour du même axe mais avec des angles de rotation différents. Dans le cas d'un cycle "triangulaire", le retrait des doigts se fait pendant la course de retour CA au point de départ et de repos. La figure 9 montre une réalisation technique correspondant au cycle de la figure 7. Une glissiére fixe 16 permet le guidage transversal de deux chariots 17. Deux vérins électriques 18 assurent le déplacement latéral des chariots 17. Cette disposition permet de réaliser les deux courses AB et CD de la figure 7, correspondant à l'introduction des doigts dans les anses du sac et à leur retrait. Sur chaque chariot deux barres 19 sont disposées en vé dans un plan vertical et assurent le guidage de deux coulisseaux 20 supportant chacun un doigt 15. La disposition des barres 19 est telle que lorsque les coulisseaux sont en position basse 20A, les doigts 15 sont réunis, et que lorsque les coulisseaux sont en position haute 20B, les doigts 15 sont suffisemment écartés pour ouvrir le sac. Un vérin électrique 21, solidaire de chaque chariot 17 assure, par l'intermédiaire de biellettes 22, la montée et la descente des coulisseaux 20, c'est à dire les mouvements BC et DA de la figure 7.The gripping system "C" ensures the introduction of the
Bien entendu, une régulation électronique classique assure avec l'aide de systèmes de contrôle de fins de courses disponibles dans le commerce, le cycle de fonctionnement général de l'ensemble.Of course, conventional electronic regulation ensures, with the help of commercially available limit switch control systems, the general operating cycle of the assembly.
Les figures 10, 11, 12 et 13 représentent une autre réalisation de l'invention n'utilisant que des mouvements curvilignes et un cycle "rectangulaire". Un chassis 23 supporte deux rotules fixes 24. Sur chacune des rotules 24 un double bras peut osciller dans toutes les directions. Ces doubles bras sont constitués d'un bras principal 25 et d'un bras secondaire 26 articulé sur le premier, autour de la rotule 24, et de telle maniére qu'il reste toujours dans le même plan que le bras principal 25. Chaque bras 25 et 26 supporte un doigt de préhension 15 disposé sur un rayon identique. A l'opposé des doigts 15, chaque bras est équipé d'une rotule 27, la rotule du bras 26 étant disposée sur un rayon plus court que pour la rotule du bras 25. Un moto-réducteur 28 entraine par des demi-tours successifs une manivelle 29 portant un axe 30. Deux biellettes 31 et 32 relient les rotules de bras 27 et l'axe de manivelle 30. Au repos (fig. 11), la disposition des éléments est telle que les deux doigts 15 sont l'un prés de l'autre et au niveau des anses du sac entrouvert par le système d'écartement "B". Lorsque le moto-réducteur 28 effectue un demi-tour, la traction sur les biellettes 31 et 32 entraine les bras 25 et 26 de façon différente puisque les rayons d'action des rotules 27 sont différents. Le bras secondaire 26 se déplace davantage que le bras principal 25. Une étude judicieuse des différents rayons permet d'obtenir l'écartement des doigts correspondant à l'ouverture des sacs, comme le montre la figure 13 de l'appareil en position d'utilisation par la clientèle. D'autre part chaque double bras est équipé d'une autre rotule 33, située sur un axe perpendiculaire au plan des bras et passant par l'axe de la rotule principale 24. Un moto-réducteur électrique 34 entraine par des demi-tours successifs un plateau 35 équipé d'un axe 36. Deux bielles 37 de longueur identique, relient les rotules 33 à l'axe 36. Les figures 10 et 12 montrent les deux positions obtenues à chaque demi-tour du moto-réducteur 35: les doigts sont écartés dans la figure 10 et introduits dans les anses du sac dans la figure 12. La conjugaison des deux moto-réducteurs permet de réaliser un cycle "rectangulaire". Les figures 10, 11 montrent l'appareil en position de repos. Les doigts sont écartés et situés au niveau des anses de sac. Le moto-réducteur 35 éffectue alors un demi-tour (course AB de la figure 7), pour introduire les doigts dans les anses du sac (figure 12). Ensuite le moto-réducteur 28 éffectue à son tour un demi-tour (course BC de la figure 7). Les bras 25 et 26 sont alors relevés vers la position d'utilisation et les doigts 15 sont écartés pour ouvrir le sac au maximum (figure 13). Pour revenir en position de repos, le moto-réducteur 35 éffectue un nouveau demi-tour provoquant le retrait des doigts (figure 10), et le moto-réducteur 28 éffectue lui aussi un nouveau demi-tour, ramenant les bras en position basse (figure 11). La aussi, la régulation du cycle de fonctionnement est confiée à une carte électronique simple et classique, les positions de fin de course des moto-réducteurs étant assurées par des contacteurs, détecteurs ou cellules du commerce.Figures 10, 11, 12 and 13 show another embodiment of the invention using only curvilinear movements and a "rectangular" cycle. A
Dans les exemples de réalisation de l'invention décrits jusqu'ici, le système de préhension revient toujours de la position d'utilisation à la position de repos en faisant les mouvements inverses (CD et DA de la figure 7, CA de la figure 8). Cette opération de retour représente 50 % du temps de fonctionnement de l'appareil. Elle représente une perte de temps précieuse et une source d'usure inutile de l'appareil. Dans le cas notamment de mouvements curvilignes, il est donc intéressant de prolonger ces mouvements aprés la position finale d'utilisation pour les refermer totalement et revenir ainsi à la position de départ. L'utilisation des mouvements rotatifs, multiples ou sous-multiples de 360°, permet de réaliser des cycles rotatifs comme celui représenté fig 14. Le cycle reste toujours "rectangulaire", mais posséde l'avantage d'avoir toujours le même sens de rotation, et une symétrie dans le plan vertical. Cette symétrie permet en outre d'utiliser deux systèmes de préhension diamêtralement opposés. La réalisation de l'invention représentée dans les figures 15 et 16 montre une application de ce type de fonctionnement, avec un double système de préhension ("C1" et "C2). Un chassis 38 (figure 15) supporte deux paliers fixes 39. Ces deux paliers permettent à deux arbres 40 de tourner coaxialement. Un moto-réducteur 41 entraine, grâce à deux petites poulies 42 et deux courroies à entrainement positif 43 (courroies crantées , chaines), deux grandes poulies 44 solidaires des arbres 40. Les arbres 40 entrainent en rotation, à leur tour, deux supports 45. Sur chaque support, quatre rotules 46 permettent l'articulation dans toutes les directions de deux bras 47 pour le premier système de préhension "C1", et de deux bras opposés 48 pour le deuxiéme système de préhension "C2". Chaque bras est doté d'un doigt de préhension 15. Pour limiter et imposer les débattements nécessaires de chaque bras 47 et 48, il faut apporter deux maintiens ou guidages supplémentaires disposés dans deux plans différents. Pour ce faire, un premier maintien est assuré par chaque bielle 49 articulée entre le palier fixe 39 et la rotule 50 solidaire du bras 47. En excentrant l'articulation de la bielle 49 autour du palier fixe 39, on constate que la position des bras est différente entre le système de préhension "C1" et le système de préhension "C2". On peut, en choisissant judicieusement la valeur de l'excentrique "E" (fig. 16), assurer le rapprochement des doigts en position basse "C2", et l'écartement convenable des doigts en position haute "C1". On constate en outre que lorsque le support 45 effectue un demi-tour, les bras 48 s'écartent et viennent prendre la position "C1", et que les bras 47 se resserent et viennent prendre la position "C2". Un deuxième maintien des bras 47 est assuré par un guidage, à l'aide des galets latéraux 51. Chaque bras est en effet muni d'un galet 51, relativement éloigné du plan du bras et circulant dans une rainure 52 ou 53, solidaire du chassis 38. La figure 16 montre le détail des rainures 52 et 53. Pour que les deux bras 47 ou 48 soient actionnés en même temps, il est nécessaire de faire circuler chaque galet 51 d'un même système de préhension dans sa propre rainure. On utilise donc une rainure 52 pour le galet de gauche du système "C1" et son opposé du système "C2", et une rainure 53 pour le galet de droite du système "C1" et son opposé du système "C2". La figure 16 représente le système "C1" en position d'utilisation par la clientèle et par consèquent en position d'introduction dans les anses de sac. Lorsque le système "C1" se met à tourner, les rampes XY agissent sur les galets 51, les dirigent vers le centre, et par conséquent, provoquent le pivotement des bras 47, et le retrait des doigts. De même, avant que le système "C2" arrive en position basse, les rampes UV dirigent les galets 51 vers l'extérieur du système et, provoquent le pivotement des bras 48 et l'introduction des doigts dans les anses de sac. Pour que l'opération d'introduction des doigts soit rapide, il est conseillé de placer les rampes UV juste avant la position basse et d'incliner fortement les rampes pour que cette opération soit suffisamment brusque. De cette maniére, le déplacement en rotation des doigts est négligeable par rapport à la taille de l'ouverture des anses. Entre les rampes, les portions de rainures sont circulaires pour maintenir les bras et les doigts dans la même position latérale durant la rotation. La figure 15 montre la disposition générale de l'appareil en position de repos. Dans cette représentation, le système d'écartement "B" est horizontal et dans la partie basse de l'appareil. On remarque l'avantage de ce type de réalisation: lorsque l'appareil est au repos, un sac se trouve prêt pour utilisation, c'est à dire, à hauteur de chargement, ouvert par le système de préhension "C1", et un autre sac, encore relié à la bande 3 est déja entrouvert par le système d'écartement "B", avec les doigts 15 déja introduits dans les anses par le système de préhension "C2". Il suffit de faire effectuer un demi-tour au double système de préhension pour qu'un deuxième sac soit offert ouvert à la clientèle. Cette disposition permet donc de réduire les temps morts de fonctionnement et de diminuer l'usure de l'appareil d'enron 50%.In the embodiments of the invention described so far, the gripping system always returns from the position of use to the rest position by making the reverse movements (CD and DA of FIG. 7, CA of FIG. 8 ). This return operation represents 50% of the device's operating time. It represents a precious waste of time and an unnecessary source of wear and tear on the device. In the case in particular of curvilinear movements, it is therefore advantageous to extend these movements after the final position of use in order to close them completely and thus return to the starting position. The use of rotary movements, multiple or submultiples of 360 °, allows for rotary cycles like the one shown in fig 14. The cycle always remains "rectangular", but has the advantage of always having the same direction of rotation , and symmetry in the vertical plane. This symmetry also allows the use of two diametrically opposite gripping systems. The realisation of the invention represented in FIGS. 15 and 16 shows an application of this type of operation, with a double gripping system ("C1" and "C2). A chassis 38 (FIG. 15) supports two fixed
Le système de détachement des sacs "D" est destiné à freiner la bande de sacs 3 pendant le transfert du dernier sac par le système de préhension "C" vers la position d'utilisation. Les sacs étant détachables par simple traction grâce à une ligne de rupture entre chaque sac, le fait de bloquer temporairement le défilement de la bande pendant l'opération de transfert, provoque la rupture de cette bande et le détachement d'un sac. Plusieurs solutions technologiques, industriellement connues, peuvent être utilisées pour effectuer cette opération. Elles utilisent essentiellement deux principes différents: l'adhérence et l'obstacle. Les figures 17 et 18 montrent un exemple de réalisation utilisant le principe de l'adhérence. Un rouleau 54 est disposé perpendiculairement au sens de défilement de la bande 3. Pour obtenir une adhérence maximum, ce rouleau est revétu de caoutchouc. La bande de sacs 3 circule autour de ce rouleau. Pour augmenter encore l'adhérence de la bande sur le rouleau 54, l'angle d'enroulement de cette bande est le plus grand possible. Eventuellement, un petit rouleau presseur 55 exerce un effort supplémentaire et permet d'avoir un angle d'enroulement maximum. Ce petit rouleau 55 peut, par exemple être monté sur un bras articulé 56, tendu par un ressort 57. Le rouleau 54 est solidaire d'un axe 58 pouvant tourner librement entre deux paliers 59, solidaires du chassis 60. Pour assurer temporairement le blocage en rotation du rouleau 54, un dispositif de freinage en rotation 61, fixé sur le chassis 60, est centré sur l'axe 58 dont il est solidaire en rotation. Ce dispositif de freinage est couramment vendu dans l'industrie comme composant de construction mécanique. Il s'agit en particulier des embrayages-freins électromagnétiques à disques ou des embrayages-freins à denture (marques WARNER ou TOURCO, par exemple). Lorsque le système de préhension "C" entraine la bande de sacs 3, l'embrayage-frein 61 est actionné au moment précis ou le sac saisi est évacué du système d'écartement "B". De cette maniére, un deuxième sac est en position correcte dans le système d'écartement "A". L'action de l'embrayage-frein sera ensuite relachée lorsque le système d'écartement "B" entrera en action et maintiendra le sac. La figure 17 montre le moment de la rupture de la bande de sacs 3. La distance FG représente la longueur "L" d'un sac. Pour que le système fonctionne correctement, le diamêtre du rouleau 54 est tel que la limite du sac suivant "H", ne soit pas encore engagée autour du rouleau 54. Les figures 19, 20 et 21 représentent une réalisation du système de détachement "D" utilisant le principe de l'obstacle. La bande de sacs 3 présentant des alvéoles au niveau des anses et entre celles-ci, il suffit d'introduire un crochet ou toute autre piéce mécanique faisant obstacle, dans cette alvéole, au moment opportun du défilement de la bande pour provoquer l'arrêt de cette bande et le détachement du premier sac. La réalisation représentée utilise un double crochet 62, articulé sur un axe fixe 63 et commandé par un électro-aimant 64 ou tout autre système de déplacement connu industriellement. Le crochet 62 est positionné juste en amont du système d'écartement "B". La figure 19 représente le moment ou le système de préhension "C" vient de saisir le sac en attente, entrouvert par le système d'écartement "B". Le crochet 62 est relevé par l'électro-aimant 64 et autorise le défilement de la bande de sacs 3. Comme dans le système par adhérence, l'électro-aimant est actionné dans l'autre sens au moment précis ou le sac suivant est en position correcte dans le système d'écartement "B". La figure 20 et sa vue de dessus 21 représentent le moment ou le crochet 62 est abaissé dans l'alvéole d'un sac. La bande de sacs 3 est alors stoppée, et le premier sac est détaché de cette bande par la traction des doigts 15 du système de préhension "C". Le crochet 62 sera relevé aprés que le système d'écartement "B" soit en action, c'est à dire lorsque le nouveau sac sera maintenu contre les plaques de ce système. Une autre réalisation du système de dètachement "D" est représentée par les figures 22 et 23. Cette réalisation particuliére de l'invention utilise le principe de l'obstacle et vise à l'intégrer au système d'écartement "B", en utilisant son énergie de dépression. Cette réalisation reprend le système à soufflets décrit page 3 et représenté par les figures 5 et 6. On retrouve les plaques alvéolées 4 et 5 assurant la succion des parois du sac et les soufflets 14. Pour la clarté des dessins, les ventilateurs 7 n'ont pas été représentés. Seul subsiste le trou 65 pour le logement du ventilateur sur la cloche 6. La cloche 6 du soufflet supérieur présente une proéminence destinée à permettre le déplacement d'un autre système à souff et situé à l'intérieur du premier. La plaque alvéolée 5 est découpée en forme de U pour recevoir une autre plaque 66 articulée sur le même axe 10 que la plaque 5. Un petit soufflet 67 assure l'étanchéité entre la plaque 5 et la plaque 66 en permettant le débattement de cette derniére. La plaque 66 dispose d'un crochet 68 pour faire fonction d'obstacle, en venant se loger dans les alvéoles des sacs. La plaque alvéolée inférieure 4 posséde un creux 69 destiné à recevoir le crochet 68 lorsque celui-ci s'abaisse. La figure 22 représente la position ou les doigts 15 viennent pénétrer à l'intérieur des anses de sac (cycle AB). Les ventilateurs sont en action et assurent une dépression à l'intérieur des soufflets. Les plaques 4 et 5 sont donc écartées et de même, la plaque 66 est attirée vers le fond de la cloche 6, provoquant le relevage du crochet 68 et la libération du sac. Lorsque le système de préhension "C" vient entrainer le sac par ses doigts 15, les ventilateurs 7 sont alors coupés. Mais comme il faut un certain temps pour remplir d'air les soufflets, le crochet 68 est libéré aprés que le sac soit entrainé. La figure 23 représente la position ou la bande 3 vient heurter le crochet 68, alors en position basse. Le premier sac est déja entrainé par le système de préhension et le sac suivant est en position correcte dans le système d'écartement "B". De ce fait, la rupture de la bande 3 se produit et le premier sac est détaché. Lorsque les ventilateurs seront de nouveau actionnés, les parois du nouveau sac seront écartées par les plaques 4 et 5. De même la plaque 66 sera relevée, libérant le crochet 68 de l'alvéole du nouveau sac.The bag detachment system "D" is intended to brake the
Les figures 24 et 25 montrent une application industrielle de l'invention. La figure 24 montre une réalisation selon une version autonôme de l'appareil, telle qu'elle peut être réalisée à l'heure actuelle, en se plaçant à coté des caisses de sortie des magasins. La figure 25 montre une réalisation future de l'invention avec intégration dans le meuble de caisse. La figure 26 représente le détail de la disposition interne des éléments pour l'exemple choisi. Un meuble 70, réalisé en tôle et servant de chassis, englobe un système de stockage "A", un système d'écartement "B", un double système de préhension "C", et un système de détachement "D". Un disque 71 fixé sur le support 45 et tournant avec celui-ci, protége le mécanisme du système de préhension en ne laissant apparaitre à l'extérieur, que les doigts 15. L'appareil est totalement ouvert sur la face avant, entre les systèmes de préhension. Cette disposition permet à l'utilisateur de sortir les sacs chargés sans devoir les soulever. Un capot 72 situé dans le fond de l'ouverture protége le système de détachement et le système d'écartement. Il permet en outre, par sa pente, d'évacuer vers l'extérieur les objets qui pourraient tomber lors de l'opération de chargement. Le capot 72 est articulé autour d'un axe 73 et relevable pour permettre un accés à l'intérieur afin de pouvoir assurer la maintenance et le chargement des rouleaux. En plus des dispositifs classiques de contrôle de fin de course ou de détection de présence nécessaires pour réaliser le cycle de fonctionnement, le démarrage automatique de l'appareil est assuré par une cellule photo-électrique 74. Cette cellule est placée dans l'axe du sac offert, de préférence vers le haut, et contrôle la présence d'un sac offert à la clientèle. De cette maniére, l'utilisation de l'appareil devient trés simple et totalement automatique. Lorsqu'il franchit la caisse de sortie, le client trouve un sac ouvert à sa disposition. Il remplit alors ce sac de ses achats, sans avoir à tenir le sac et en utilisant ses deux mains. Lorsqu'il a terminé, il retire le sac de l'appareil et provoque de ce fait le déclenchement de la cellule 74 et la mise en marche de l'appareil. Un autre sac se présente donc automatiquement quelques secondes plus tard. Dans l'exemple représenté, le cycle de fonctionnement se présente comme suit:
- En position de repos, un sac est offert à la clientèle, un autre sac est en position dans le système d'écartement, avec les doigts 15 du système de préhension introduits. Les ventilateurs sont en service et le frein coupé.
- L'enlévement du sac offert provoque la mise en marche du moteur et l'entrainement du deuxiéme sac. Les ventila teurs sont coupés. Le frein reste coupé.
- Le mouvement du système de préhension actionne un détecteur. Le frein est actionné et provoque le détachement du sac. Les ventilateurs restent coupés. Le moteur reste en fonctionnement.
- Le mouvement du système de préhension actionne un autre détecteur. Le moteur s'arréte en positionnant le sac ouvert en position d'utilisation. Les ventilateurs sont mis en marche et le troisiéme sac est entrouvert. Le frein est libéré.
- Le cycle recommence à chaque enlévement de sac.Figures 24 and 25 show an industrial application of the invention. FIG. 24 shows an embodiment according to an autonomous version of the device, as it can be produced at present, by placing itself next to the checkout counters. FIG. 25 shows a future embodiment of the invention with integration into the checkout unit. Figure 26 shows the detail of the internal arrangement of the elements for the chosen example. A piece of
- In the rest position, a bag is offered to customers, another bag is in position in the spacing system, with the
- Removal of the free bag causes the engine to start and the second bag to drive. The ventila teurs are cut. The brake remains off.
- The movement of the gripping system activates a detector. The brake is applied and causes the bag to detach. The fans remain off. The engine remains in operation.
- The movement of the gripping system activates another detector. The engine stops by positioning the open bag in the use position. The fans are turned on and the third bag is ajar. The brake is released.
- The cycle begins each time the bag is removed.
Claims (13)
- d'un système de stockage des sacs sous forme de rouleau.
- d'un système d'écartement des parois des sacs par aspiration de ces parois.
- d'un système de préhension par les anses de sacs, assurant l'entrainement de la bande de sacs, l'ouverture des sacs et leur maintien dans une position d'utilisation pour l'opérateur.
- d'un système de détachement des sacs par retenue du défilement de la bande de sacs.1. Device for the automatic distribution of plastic bags or similar material, of the type with handles, presented in a strip and detachable by traction, characterized in that it is composed:
- a bag storage system in the form of a roll.
- a system for separating the walls of the bags by suction from these walls.
- a gripping system by the bag handles, ensuring the training of the bag strip, the opening of the bags and their maintenance in a position of use for the operator.
- a bag detachment system by retaining the scrolling of the bag strip.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CH1/89 | 1989-01-03 | ||
| CH189A CH679032A5 (en) | 1989-01-03 | 1989-01-03 | Distributeur automatique de sacs. |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0381914A2 true EP0381914A2 (en) | 1990-08-16 |
| EP0381914A3 EP0381914A3 (en) | 1991-09-04 |
Family
ID=4177170
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19890810987 Withdrawn EP0381914A3 (en) | 1989-01-03 | 1989-12-28 | Automatic bag dispenser |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP0381914A3 (en) |
| CH (1) | CH679032A5 (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1996022043A1 (en) * | 1995-01-16 | 1996-07-25 | Johan Marius Tryk | A plastic bag dispenser and a plastic bag for use in said dispenser |
| WO2014122488A1 (en) | 2013-02-05 | 2014-08-14 | Ante Bekavac | Interconnected series of articles and dispenser for same |
| CN109159985A (en) * | 2018-10-31 | 2019-01-08 | 许汝炜 | Separator and packing machine |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2281516A (en) * | 1941-01-02 | 1942-04-28 | Thomas M Royal | Container handling apparatus |
| US4345629A (en) * | 1981-01-26 | 1982-08-24 | Inglett & Company, Inc. | Automatic bag hanger |
| CH642528A5 (en) * | 1979-08-17 | 1984-04-30 | Dala Invest Ab | Method for the automatic handling of shopping bags at a check-out counter, and check-out counter for carrying out the method |
| FR2558704A1 (en) * | 1984-01-27 | 1985-08-02 | Manguelin Henri | Installation for dispensing bags made from flexible plastic, particularly bags with lateral handles, stored on a roll, in particular for hypermarkets |
-
1989
- 1989-01-03 CH CH189A patent/CH679032A5/en not_active IP Right Cessation
- 1989-12-28 EP EP19890810987 patent/EP0381914A3/en not_active Withdrawn
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2281516A (en) * | 1941-01-02 | 1942-04-28 | Thomas M Royal | Container handling apparatus |
| CH642528A5 (en) * | 1979-08-17 | 1984-04-30 | Dala Invest Ab | Method for the automatic handling of shopping bags at a check-out counter, and check-out counter for carrying out the method |
| US4345629A (en) * | 1981-01-26 | 1982-08-24 | Inglett & Company, Inc. | Automatic bag hanger |
| FR2558704A1 (en) * | 1984-01-27 | 1985-08-02 | Manguelin Henri | Installation for dispensing bags made from flexible plastic, particularly bags with lateral handles, stored on a roll, in particular for hypermarkets |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1996022043A1 (en) * | 1995-01-16 | 1996-07-25 | Johan Marius Tryk | A plastic bag dispenser and a plastic bag for use in said dispenser |
| WO2014122488A1 (en) | 2013-02-05 | 2014-08-14 | Ante Bekavac | Interconnected series of articles and dispenser for same |
| CN109159985A (en) * | 2018-10-31 | 2019-01-08 | 许汝炜 | Separator and packing machine |
Also Published As
| Publication number | Publication date |
|---|---|
| EP0381914A3 (en) | 1991-09-04 |
| CH679032A5 (en) | 1991-12-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0145630B1 (en) | Pick-up device for removing articles one by one | |
| FR2657854A1 (en) | FILM FILM LOADER. | |
| EP0905660B1 (en) | Device for releasing and dispensing articles | |
| EP0668737B1 (en) | Waster recovery and storage device | |
| FR2834702A1 (en) | AUTOMATED METHOD AND INSTALLATION FOR THE STORAGE AND DISTRIBUTION OF VARIOUS OBJECTS OR ARTICLES | |
| EP2366281B1 (en) | Machine for automatically turning over objects conditioned on trays | |
| FR2670761A1 (en) | PNEUMATIC TUBE SYSTEM. | |
| CA3084884A1 (en) | Machine for packaging with at least one sterilization packaging material | |
| CA2231344A1 (en) | Automatic bag-dispenser | |
| EP0006780B1 (en) | Changer for pre-cut film sheets and radiodiagnostic apparatus provided with such a changer | |
| CA1321801C (en) | Glass sheet lifting and handling apparatus | |
| EP0381914A2 (en) | Automatic bag dispenser | |
| FR2810297A1 (en) | Distributor for container cover, has flat slider slidably mounted between upper and lower plates forming carrier cell to receive and displace cover taken from bottom of pile towards positioning cell | |
| FR2513231A1 (en) | METHOD AND DEVICE FOR STACKING ANY SUITE OF SHEETS AND OTHER PLAN DOCUMENTS OF LENGTH AND DIFFERENT CHARACTERISTICS | |
| FR2549020A1 (en) | TRANSPORTATION SYSTEM FOR FLAT OBJECTS TRANSPORTED BY AN AIRFLOW | |
| EP0316247B1 (en) | Machine for the automatic delivery of trays | |
| EP0425346A1 (en) | Device to grip storage containers and to move them horizontally along a supporting plate | |
| EP0322269A1 (en) | Automatic sachet dispenser | |
| FR2948648A1 (en) | Apparatus for extraction and loading of e.g. standard trade article containers, in storage magazine, has fingers whose displacement is controlled by motor such that finger is moved into gripping positions between open and closed positions | |
| EP0390620A1 (en) | Folding unit for approximately flat flexible textile products | |
| FR2478601A1 (en) | IMPROVEMENTS IN APPARATUS FOR DISTRIBUTING ROLL PRODUCTS, IN PARTICULAR PAPER HAND TOWELS | |
| FR3044649A1 (en) | COVER DISTRIBUTOR | |
| FR2525569A1 (en) | Parts magazine and supply for assembly post - uses pair of vertical chains to hang storage bins over post served by second pair of parallel chains | |
| CH413705A (en) | Soft bag closing device | |
| FR2474181A1 (en) | X=ray film cassette unloader and reloader - has four stage sliding transport and unload to processor plug size format gauging, etc. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): BE CH DE ES FR GB IT LI NL |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): BE CH DE ES FR GB IT LI NL |
|
| 17P | Request for examination filed |
Effective date: 19920619 |
|
| 17Q | First examination report despatched |
Effective date: 19931217 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 19950701 |