EP0357441A1 - Improvements in or relating to underwater communication devices - Google Patents
Improvements in or relating to underwater communication devices Download PDFInfo
- Publication number
- EP0357441A1 EP0357441A1 EP89308857A EP89308857A EP0357441A1 EP 0357441 A1 EP0357441 A1 EP 0357441A1 EP 89308857 A EP89308857 A EP 89308857A EP 89308857 A EP89308857 A EP 89308857A EP 0357441 A1 EP0357441 A1 EP 0357441A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- sonar
- beacon
- enclosure
- beacons
- signals
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q1/00—Details of, or arrangements associated with, antennas
- H01Q1/04—Adaptation for subterranean or subaqueous use
Definitions
- This invention relates to underwater communication devices.
- a major problem which is experienced by Hunter type weapons of the anti-submarine variety is the limited range of acoustic-sonar detectors and hence the short range at which a target can be identified.
- This drawback can be overcome if sensing devices are positioned well away from, and peripheral to, the weapons. Signals received by such sensing devices could be analysed, a vessel identified by comparison with a library of voice prints, and a coded message transmitted to a weapon, all well in advance of the approach of a possible target. Alternatively, the voice print could be broadcast in its entirety. In either event, the response time available to the weapon system could be significantly enhanced.
- sensors and weapons could be positioned on the sea bed in such a manner as to form not only a "safe haven” for friendly vessels, but also as a trap for enemy shipping which tried to penetrate the safe area. It would be particularly useful for friendly vessels which believe they may be being shadowed/followed, to run through a series of underwater communication devices which could detect and disseminate information on the shadowing vessel and prepare weapon systems to destroy it.
- Such weapon systems could be of a type described or illustrated in our European Patent Application No.83306517.0.
- This invention provides an underwater communications device comprising an enclosure, means to anchor the enclosure to the sea bed, sonar listening equipment in the enclosure for receiving sonar signals from the surrounding water, a plurality of communications beacons enclosed in individual buoyant containers, means for releasably holding the beacon in the enclosure and means for releasing a beacon from the enclosure in response to receipt of a sonar signal by said sonar receiving means to allow the beacons to surface and to transmit a signal pursuant to the receipt of said sonar signal.
- the sonar receiving apparatus may include means to store different sonar signals emitted by different surface or underwater vessels whether hostile or friendly, means to receive and compare a sonar signal with said stored sonar signals and means to initiate release of a beacon in response to any sonar signal identified as being that of a hostile vessel to transmit a signal indicating the presence of a hostile vessel.
- the sonar receiving apparatus may be arranged to supply information to the beacon including the identity of the vessel detected to be transmitted by said beacon after release of the beacon from the enclosure and on reaching the surface.
- the beacons may embody radio transmitters for transmitting radio signals on surfacing indicating the detection of a "hostile" vessel.
- the apparatus may be provided with means for communicating with one or more remote weapon systems for activating the weapon systems to be used against a target detected by the sonar equipment.
- the enclosure may have an upper part containing the sonar equipment and said beacons and a lower part having means to bury the lower part in the sea bed.
- an underwater communication device comprising a watertight elongate vertically extending container 10 which is intended to be partially or wholly buried in the sea bed 11.
- the upper part of the container 10 contains a first, inner canister 12 in which a plurality of individually releasable communication beacons 13 are housed and the lower part of the container houses a second canister 14 containing a burying mechanism for the container 10.
- the outer container 10 is, as indicated above, of elongate form and generally cylindrical cross-section.
- the container is buried or partially buried within the sea bed 11 as illustrated in the drawing to minimise the risk of the device being detected or damaged.
- the container has self-burying means comprising, firstly a centrifugal pump 15 for removing sand or silt from under the bottom end of the container; secondly a spiral or helical agitator/auger 16 for loosening the material on the sea bed and thirdly a high pressure pump 17 for pumping sea water to nozzles 18 disposed around the periphery of the lower end of the container 10 and for loosening sand or silt under the container.
- the centrifugal pump 15 is driven by an electric drive motor 19 through a gear train 20, the motor being powered by batteries 21.
- This pump sucks up sand and silt from the sea bed, as indicated by chain lines 22, and forces it radially outwardly to the lower end of an annular region 23 between the outer container 10 and the inner canisters 12 and 14.
- the sand and silt are forced upwardly through this annular region to be expelled as indicated by arrows 24 at the upper end of the container 10.
- the agitator/auger 16 is driven from the drive shaft of the pump 15. This shaft also drives a high pressure pump 17.
- the device is laid in position by dropping it into the sea and it is so constructed that when released in water, it falls with the burying mechanism downwards so this end settles on the sea bed.
- the container would be substantially wholly buried to minimise the risk of detection by underwater search equipment or accidental damage by equipment moving along the sea bed. Sand or silt may get washed over the container by the sea with the result that the container may be completely covered.
- Control of the self-burial means may be effected using appropriate sensors.
- a first sensor 25 to detect initial contact with the sea bed and initiate operation of the motor 19 is mounted at the lower end of the container 10 and a second sensor 26 is mounted adjacent the upper end of container 10 to detect burial of the container to the required depth.
- the upper canister 13 is formed with a central vertically extending housing 30 the lower part of which contains a control assembly 31 including a sonar receiver, a data processing device and an interface device for interfacing the sonar receiver with the radio beacons 13.
- the upper part of the housing 30 is an aerial housing 32 containing an extendible sonar aerial mechanism 33 which extends automatically once the container is fully buried as detected by the sensor 26.
- each beacon 38 forms a piston in the lower end of its tube 35 and the lower end of the tube is connected by a passage 46 to a pneumatically or hydraulically operated ram 47 containing a vertically operating piston assembly 48.
- the cylinder 47 is connected by a lateral passage 49 through a non-return inlet valve 50 to the aforesaid annular passage 23 to receive a charge of water therefrom when the ram 48 is returned.
- Ram 48 is advanced to displace water from the cylinder 47 through passage 46 into the lower end of tube 35 to force the beacon 38 contained in the tube upwardly fracturing the watertight seal 37 to project out of the tube. Once the seal 37 has been fractured, the tube 35 will flood and the beacon will float upwardly out of the tube to the surface under the influence of its own positive buoyancy. Operation of the hydraulic pneumatic rams connected to piston assemblies 48 is effected by a rotary switch construction (not shown) triggered by a signal from the control assembly 31 described above.
- the seals 37 could be frangible or held in position with vacuum differential on an "O" ring and and solenoid controlled valves may be provided connecting the tubes to the annular chamber to flood the tube of a beacon to be deployed. Once the tube has been flooded to bring the tube into equilibrium, the beacons could be driven out with hydro-static pressure or a gas charge such as that provided by firing a pyro-technic type cartridge could be utilised.
- the control assembly 31 of the underwater communication device receives sonar signals from vessels passing within range of the device. It is well known that each vessel has its own individual noise pattern and the control assembly has a memory in which the noise patterns of all known friendly and enemy vessels are recorded.
- the control assembly has facilities for analysing received sonar signals to determine whether they are of friendly or enemy vessels and, if of enemy vessels, to initiate the firing of one of the radio beacons 38 to the surface to transmit a signal by radio warning that an enemy vessel has been detected.
- the radio beacons broadcast coded messages on surfacing and, following a set period of broadcasting and after acknowledgement that a message has been received, a programme to self-destruct the device is initiated automatically.
- the control assembly may also be arranged to cause the radio to transmit a signal identifying the vessel detected.
- each of the tubes 35 tapers towards its lower end and the bodies of the beacons 38 taper in a corresponding manner and are dimensioned to provide a narrow gap 55 between the outer wall of the beacon 38 and the encircling wall of the tube 35.
- annular resilient "O" ring seals 56 are mounted around the upper open ends of the tubes 35 and each of the beacons 38 has an annular rim adjacent its upper end to engage the encircling seal 56 of the respective tube 35 in which the beacon is housed.
- each beacon 38 is formed with an annular skirt 58 having an inner annular rib 59.
- a plurality of latches 60 are mounted on pivots 61 around the lower end of the tube 35 to project into the skirt 58 of the beacon and are spring loaded by tension springs 62 to engage with the rib 59 and retain the beacon in the tube. The latches are retracted to release the beacon by solenoids indicated at 63.
- a heavy compression spring 64 is disposed in the underside of the beacon 38 and the bottom wall 65 of the tube 35 to assist in spacing the beacon from the tube when the latches 60 have been released.
- the beacon could, equally, be discharged with the assistance of a gas charge or hydraulic pressure applied to the underside of the beacon.
- each container tube 35 housing the beacons is initially filled with a nitrogen atmosphere to minimise corrosion of the beacons and their release mechanisms when the communication device is installed on the sea bed. There will be a considerable pressure differential depending on the depth of water in which the device is located tending to hold the beacons in the container tubes.
- each container tube has a solenoid controlled valve (not shown) connecting the tube to the encircling annular region 23 between the inner and outer canisters to allow water to bleed into the tubes 35 when the solenoid controlled valve is open. Both the solenoid controlled valves and the solenoid controlled latches holding the beacons in the tubes are triggered by said rotary switch from the control assembly when a beacon is to be released as described above.
- the "O" ring seals 56 are omitted as are the solenoid controlled valves for the tubes 35 and the tubes are allowed to flood with sea water on immersion of the device in the sea.
- the solenoid controlled latches holding the beacons in place in the tubes are constructed and arranged so as not to be affected by sea water present in the tubes.
- the container of the beacon itself is constructed to serve as the transmitting aerial for the beacon, that is the dome of the beacon embodies the aerial.
- the dome could also be provided with a gas-filled balloon which is deployed automatically once the beacon reaches the surface of the sea to enable a radio signal to be transmitted over a greater range.
Landscapes
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
- Mobile Radio Communication Systems (AREA)
Abstract
Description
- This invention relates to underwater communication devices.
- A major problem which is experienced by Hunter type weapons of the anti-submarine variety is the limited range of acoustic-sonar detectors and hence the short range at which a target can be identified. This drawback can be overcome if sensing devices are positioned well away from, and peripheral to, the weapons. Signals received by such sensing devices could be analysed, a vessel identified by comparison with a library of voice prints, and a coded message transmitted to a weapon, all well in advance of the approach of a possible target. Alternatively, the voice print could be broadcast in its entirety. In either event, the response time available to the weapon system could be significantly enhanced. Similarly, sensors and weapons could be positioned on the sea bed in such a manner as to form not only a "safe haven" for friendly vessels, but also as a trap for enemy shipping which tried to penetrate the safe area. It would be particularly useful for friendly vessels which believe they may be being shadowed/followed, to run through a series of underwater communication devices which could detect and disseminate information on the shadowing vessel and prepare weapon systems to destroy it. Such weapon systems could be of a type described or illustrated in our European Patent Application No.83306517.0.
- Furthermore, a major problem for Naval Forces is to be able to maintain surveillance on hostile forces whiilst remaining at a safe distance from such hostile forces and in particular when vulnerable to land based aircraft. It is even more difficult to maintain surveillance and at the same time remain undetected whilst so doing. This invention is concerned with apparatus directed towards that purpose.
- Hitherto no suitable device has been available for long term service underwater for detecting vessel movements and then providing a long range signal to communicate the detection of an enemy vessel or vessels.
- This invention provides an underwater communications device comprising an enclosure, means to anchor the enclosure to the sea bed, sonar listening equipment in the enclosure for receiving sonar signals from the surrounding water, a plurality of communications beacons enclosed in individual buoyant containers, means for releasably holding the beacon in the enclosure and means for releasing a beacon from the enclosure in response to receipt of a sonar signal by said sonar receiving means to allow the beacons to surface and to transmit a signal pursuant to the receipt of said sonar signal.
- More specifically the sonar receiving apparatus may include means to store different sonar signals emitted by different surface or underwater vessels whether hostile or friendly, means to receive and compare a sonar signal with said stored sonar signals and means to initiate release of a beacon in response to any sonar signal identified as being that of a hostile vessel to transmit a signal indicating the presence of a hostile vessel.
- In addition the sonar receiving apparatus may be arranged to supply information to the beacon including the identity of the vessel detected to be transmitted by said beacon after release of the beacon from the enclosure and on reaching the surface.
- In any of the above arrangements, the beacons may embody radio transmitters for transmitting radio signals on surfacing indicating the detection of a "hostile" vessel.
- In any of the above arrangements the apparatus may be provided with means for communicating with one or more remote weapon systems for activating the weapon systems to be used against a target detected by the sonar equipment.
- Also in any of the above arrangements the enclosure may have an upper part containing the sonar equipment and said beacons and a lower part having means to bury the lower part in the sea bed.
- The following is a description of some specific embodiments of the invention, reference being made to accompanying drawings in which:
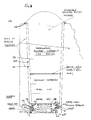
- Figure 1 is a diagrammatic sectional view through an underwater communication device showing the device partly buried in the sea bed; and
- Figure 2 is a plane view of the device of Figure 1; and
- Figure 3 is a detailed view of a modified form of communication device.
- Referring to the drawings, an underwater communication device is shown comprising a watertight elongate vertically extending
container 10 which is intended to be partially or wholly buried in the sea bed 11. The upper part of thecontainer 10 contains a first,inner canister 12 in which a plurality of individually releasable communication beacons 13 are housed and the lower part of the container houses asecond canister 14 containing a burying mechanism for thecontainer 10. - The
outer container 10 is, as indicated above, of elongate form and generally cylindrical cross-section. The container is buried or partially buried within the sea bed 11 as illustrated in the drawing to minimise the risk of the device being detected or damaged. For this purpose, the container has self-burying means comprising, firstly acentrifugal pump 15 for removing sand or silt from under the bottom end of the container; secondly a spiral or helical agitator/auger 16 for loosening the material on the sea bed and thirdly ahigh pressure pump 17 for pumping sea water tonozzles 18 disposed around the periphery of the lower end of thecontainer 10 and for loosening sand or silt under the container. Thecentrifugal pump 15 is driven by anelectric drive motor 19 through a gear train 20, the motor being powered bybatteries 21. This pump sucks up sand and silt from the sea bed, as indicated bychain lines 22, and forces it radially outwardly to the lower end of anannular region 23 between theouter container 10 and theinner canisters arrows 24 at the upper end of thecontainer 10. In the embodiment illustrated, the agitator/auger 16 is driven from the drive shaft of thepump 15. This shaft also drives ahigh pressure pump 17. - The device is laid in position by dropping it into the sea and it is so constructed that when released in water, it falls with the burying mechanism downwards so this end settles on the sea bed. Operation of the
drive motor 19 drivingpump - Control of the self-burial means may be effected using appropriate sensors. A
first sensor 25 to detect initial contact with the sea bed and initiate operation of themotor 19 is mounted at the lower end of thecontainer 10 and asecond sensor 26 is mounted adjacent the upper end ofcontainer 10 to detect burial of the container to the required depth. - The upper canister 13 is formed with a central vertically extending
housing 30 the lower part of which contains acontrol assembly 31 including a sonar receiver, a data processing device and an interface device for interfacing the sonar receiver with the radio beacons 13. The upper part of thehousing 30 is anaerial housing 32 containing an extendible sonaraerial mechanism 33 which extends automatically once the container is fully buried as detected by thesensor 26. - Around the
central housing 30 of the canister 13 there are four vertically extendingtubes 35 each of which has anopen end 36 closed by awatertight seal 37 within each of the tubes there is a "torpedo" shapedcommunications beacon 38 comprising, from its upper end, anose 39, and ground plane antenna withflexible ground plane 40, abuoyancy tank 41, anelectronics bay 42, abattery pack 43 and abottom end base 44. Thebase 44 of each beacon forms a piston in the lower end of itstube 35 and the lower end of the tube is connected by apassage 46 to a pneumatically or hydraulically operated ram 47 containing a vertically operating piston assembly 48. The cylinder 47 is connected by a lateral passage 49 through a non-return inlet valve 50 to the aforesaidannular passage 23 to receive a charge of water therefrom when the ram 48 is returned. - Ram 48 is advanced to displace water from the cylinder 47 through
passage 46 into the lower end oftube 35 to force thebeacon 38 contained in the tube upwardly fracturing thewatertight seal 37 to project out of the tube. Once theseal 37 has been fractured, thetube 35 will flood and the beacon will float upwardly out of the tube to the surface under the influence of its own positive buoyancy. Operation of the hydraulic pneumatic rams connected to piston assemblies 48 is effected by a rotary switch construction (not shown) triggered by a signal from thecontrol assembly 31 described above. - It would be appreciated that other arrangements may be provided for displacing the
beacons 38 from the tubes. For example theseals 37 could be frangible or held in position with vacuum differential on an "O" ring and and solenoid controlled valves may be provided connecting the tubes to the annular chamber to flood the tube of a beacon to be deployed. Once the tube has been flooded to bring the tube into equilibrium, the beacons could be driven out with hydro-static pressure or a gas charge such as that provided by firing a pyro-technic type cartridge could be utilised. - The
control assembly 31 of the underwater communication device receives sonar signals from vessels passing within range of the device. It is well known that each vessel has its own individual noise pattern and the control assembly has a memory in which the noise patterns of all known friendly and enemy vessels are recorded. The control assembly has facilities for analysing received sonar signals to determine whether they are of friendly or enemy vessels and, if of enemy vessels, to initiate the firing of one of theradio beacons 38 to the surface to transmit a signal by radio warning that an enemy vessel has been detected. The radio beacons broadcast coded messages on surfacing and, following a set period of broadcasting and after acknowledgement that a message has been received, a programme to self-destruct the device is initiated automatically. The control assembly may also be arranged to cause the radio to transmit a signal identifying the vessel detected. These messages could be received by ships or aircraft hundreds of miles away and, if necessary, then re-transmitted either by radio to other ships or aircraft or, acoustically or by sonar to alert and activate weapon systems already in position on the sea bed. Examples of such weapon systems are described and illustrated in our European Patent Application No. 83306517.0. - Thus by deploying underwater communication devices in accordance with the invention at strategic locations such as within the vicinity of enemy ports or passages used by enemy vessels, a listening watch over vast areas can easily be maintained and the information gathered, passed to friendly forces at the earliest possible moment.
- Reference is now made to Figure 3 of the drawings in which a modified arrangement is illustrated. In the modified arrangement, each of the
tubes 35 tapers towards its lower end and the bodies of thebeacons 38 taper in a corresponding manner and are dimensioned to provide anarrow gap 55 between the outer wall of thebeacon 38 and the encircling wall of thetube 35. At the upper end of theinner canister 12 annular resilient "O" ring seals 56 are mounted around the upper open ends of thetubes 35 and each of thebeacons 38 has an annular rim adjacent its upper end to engage theencircling seal 56 of therespective tube 35 in which the beacon is housed. - The lower end of each
beacon 38 is formed with anannular skirt 58 having an innerannular rib 59. A plurality oflatches 60 are mounted onpivots 61 around the lower end of thetube 35 to project into theskirt 58 of the beacon and are spring loaded bytension springs 62 to engage with therib 59 and retain the beacon in the tube. The latches are retracted to release the beacon by solenoids indicated at 63. - A
heavy compression spring 64 is disposed in the underside of thebeacon 38 and thebottom wall 65 of thetube 35 to assist in spacing the beacon from the tube when thelatches 60 have been released. The beacon could, equally, be discharged with the assistance of a gas charge or hydraulic pressure applied to the underside of the beacon. - The
tubes 35 housing the beacons are initially filled with a nitrogen atmosphere to minimise corrosion of the beacons and their release mechanisms when the communication device is installed on the sea bed. There will be a considerable pressure differential depending on the depth of water in which the device is located tending to hold the beacons in the container tubes. In order to relieve this pressure differential, each container tube has a solenoid controlled valve (not shown) connecting the tube to the encirclingannular region 23 between the inner and outer canisters to allow water to bleed into thetubes 35 when the solenoid controlled valve is open. Both the solenoid controlled valves and the solenoid controlled latches holding the beacons in the tubes are triggered by said rotary switch from the control assembly when a beacon is to be released as described above. In a simplified arrangement, the "O" ring seals 56 are omitted as are the solenoid controlled valves for thetubes 35 and the tubes are allowed to flood with sea water on immersion of the device in the sea. The solenoid controlled latches holding the beacons in place in the tubes are constructed and arranged so as not to be affected by sea water present in the tubes. - In a further arrangement according to the invention, the container of the beacon itself is constructed to serve as the transmitting aerial for the beacon, that is the dome of the beacon embodies the aerial. The dome could also be provided with a gas-filled balloon which is deployed automatically once the beacon reaches the surface of the sea to enable a radio signal to be transmitted over a greater range.
Claims (6)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB8820719 | 1988-09-02 | ||
| GB8820719A GB2222805B (en) | 1988-09-02 | 1988-09-02 | Improvements in or relating to underwater communication devices |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0357441A1 true EP0357441A1 (en) | 1990-03-07 |
| EP0357441B1 EP0357441B1 (en) | 1993-11-10 |
Family
ID=10643043
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19890308857 Expired - Lifetime EP0357441B1 (en) | 1988-09-02 | 1989-09-01 | Improvements in or relating to underwater communication devices |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP0357441B1 (en) |
| DE (1) | DE68910620T2 (en) |
| DK (1) | DK436489A (en) |
| GB (1) | GB2222805B (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6130642A (en) * | 1997-03-04 | 2000-10-10 | The United States Of America As Represented By The Secretary Of The Navy | Method and system to improve GPS navigation |
| EP1092937A3 (en) * | 1999-10-13 | 2002-04-03 | Lawborough Consultants Limited | Enclosure for installation in the seabed |
| GB2377412A (en) * | 2000-11-03 | 2003-01-15 | Lawborough Consultants Ltd | Support vessel for self-burying mines |
| RU184783U1 (en) * | 2018-01-31 | 2018-11-08 | Федеральное Государственное Казенное Военное Образовательное Учреждение Высшего Образования "Тихоокеанское Высшее Военно-Морское Училище Имени С.О. Макарова" Министерства Обороны Российской Федерации (Г. Владивосток) | Microcontroller sonar buoy |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3460058A (en) * | 1960-10-25 | 1969-08-05 | Itt | Radio sonobuoy |
| DE2209544A1 (en) * | 1972-02-29 | 1973-09-13 | Dynamit Nobel Ag | SIGNAL DEVICE FOR SHIPS IN EMERGENCY |
| GB1534852A (en) * | 1967-11-23 | 1978-12-06 | Ultra Electronics Ltd | Underwater detection equipment |
| US4189786A (en) * | 1962-06-29 | 1980-02-19 | Adler Ronald E | Radio buoy assembly |
| EP0110554A2 (en) * | 1982-10-28 | 1984-06-13 | Underwater Storage Limited | Underwater weapon systems |
| WO1986004873A1 (en) * | 1985-02-19 | 1986-08-28 | Cochrane Subsea Acoustics, Inc. | Subsea acoustic relocation system |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2148798B (en) * | 1983-08-15 | 1987-06-03 | Cochrane Subsea Acoustics Inc | Subsea accoustic relocation system |
-
1988
- 1988-09-02 GB GB8820719A patent/GB2222805B/en not_active Expired - Fee Related
-
1989
- 1989-09-01 EP EP19890308857 patent/EP0357441B1/en not_active Expired - Lifetime
- 1989-09-01 DE DE1989610620 patent/DE68910620T2/en not_active Expired - Fee Related
- 1989-09-04 DK DK436489A patent/DK436489A/en not_active Application Discontinuation
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3460058A (en) * | 1960-10-25 | 1969-08-05 | Itt | Radio sonobuoy |
| US4189786A (en) * | 1962-06-29 | 1980-02-19 | Adler Ronald E | Radio buoy assembly |
| GB1534852A (en) * | 1967-11-23 | 1978-12-06 | Ultra Electronics Ltd | Underwater detection equipment |
| DE2209544A1 (en) * | 1972-02-29 | 1973-09-13 | Dynamit Nobel Ag | SIGNAL DEVICE FOR SHIPS IN EMERGENCY |
| EP0110554A2 (en) * | 1982-10-28 | 1984-06-13 | Underwater Storage Limited | Underwater weapon systems |
| WO1986004873A1 (en) * | 1985-02-19 | 1986-08-28 | Cochrane Subsea Acoustics, Inc. | Subsea acoustic relocation system |
Non-Patent Citations (1)
| Title |
|---|
| ELECTRICAL/ELECTRONIC POWER & CONTROL, PRODUCT ENGINEERING, vol. 40, no. 12, 16th June 1969, pages 94-95; "Coded sounds in the sea direct underwater work more reliably" * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6130642A (en) * | 1997-03-04 | 2000-10-10 | The United States Of America As Represented By The Secretary Of The Navy | Method and system to improve GPS navigation |
| EP1092937A3 (en) * | 1999-10-13 | 2002-04-03 | Lawborough Consultants Limited | Enclosure for installation in the seabed |
| GB2377412A (en) * | 2000-11-03 | 2003-01-15 | Lawborough Consultants Ltd | Support vessel for self-burying mines |
| RU184783U1 (en) * | 2018-01-31 | 2018-11-08 | Федеральное Государственное Казенное Военное Образовательное Учреждение Высшего Образования "Тихоокеанское Высшее Военно-Морское Училище Имени С.О. Макарова" Министерства Обороны Российской Федерации (Г. Владивосток) | Microcontroller sonar buoy |
Also Published As
| Publication number | Publication date |
|---|---|
| GB2222805B (en) | 1992-04-29 |
| EP0357441B1 (en) | 1993-11-10 |
| DK436489D0 (en) | 1989-09-04 |
| GB8820719D0 (en) | 1989-03-30 |
| GB2222805A (en) | 1990-03-21 |
| DK436489A (en) | 1990-03-03 |
| DE68910620T2 (en) | 1994-03-03 |
| DE68910620D1 (en) | 1993-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2190743B1 (en) | Methods and apparatus for marine deployment | |
| US4692906A (en) | Ocean bottom seisometer | |
| CA2737207C (en) | Methods and apparatus for marine deployment | |
| RU2759033C2 (en) | Autonomous location system of aircraft | |
| EP2744704B1 (en) | Communication buoy and method of deployment | |
| US5277117A (en) | Underwater mine countermeasure warfare system | |
| US4141295A (en) | Actuation mine simulator | |
| US4586421A (en) | Underwater weapon systems | |
| US5224074A (en) | Sonobuoy for forming virtual vertical sensing arrays | |
| US20040059476A1 (en) | Deep sea data retrieval apparatus and system | |
| EP0357441B1 (en) | Improvements in or relating to underwater communication devices | |
| US6220168B1 (en) | Underwater intelligence gathering weapon system | |
| US6371003B1 (en) | Enclosures for installation on the seabed | |
| US4395952A (en) | Underwater weapon systems | |
| US5339288A (en) | Underwater sound source with remote controlled actuator | |
| GB2048439A (en) | Improvements in or relating to underwater weapons | |
| GB2345667A (en) | Method and apparatus for destruction of drifting sea mines | |
| US5386793A (en) | Line handling apparatus | |
| RU2309871C2 (en) | Two-module submarine with emergency and rescue system and operational-tactical complex | |
| RU2819811C1 (en) | Mobile marine area security system | |
| WO2010025951A2 (en) | Marine defence system | |
| EP0053210B1 (en) | Underwater weapon systems | |
| CA2203294C (en) | Method and system for destroying submerged objects, in particular submerged mines | |
| NO320214B1 (en) | Improved enclosure device for installation on the seabed | |
| NO342820B1 (en) | A data acquisition unit |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE FR SE |
|
| 17P | Request for examination filed |
Effective date: 19900403 |
|
| 17Q | First examination report despatched |
Effective date: 19921016 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR SE |
|
| REF | Corresponds to: |
Ref document number: 68910620 Country of ref document: DE Date of ref document: 19931216 |
|
| ET | Fr: translation filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| EAL | Se: european patent in force in sweden |
Ref document number: 89308857.5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20060331 Year of fee payment: 17 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060531 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20060531 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20060817 Year of fee payment: 18 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: D3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20070403 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20060907 Year of fee payment: 18 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20070902 |
|
| EUG | Se: european patent has lapsed | ||
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20080531 |