EP0311143B1 - Méthode et dispositif de production d'un signal artificiel de synchronisation - Google Patents
Méthode et dispositif de production d'un signal artificiel de synchronisation Download PDFInfo
- Publication number
- EP0311143B1 EP0311143B1 EP19880117506 EP88117506A EP0311143B1 EP 0311143 B1 EP0311143 B1 EP 0311143B1 EP 19880117506 EP19880117506 EP 19880117506 EP 88117506 A EP88117506 A EP 88117506A EP 0311143 B1 EP0311143 B1 EP 0311143B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- tape
- signal
- sync
- head
- location
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images



Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B15/00—Driving, starting or stopping record carriers of filamentary or web form; Driving both such record carriers and heads; Guiding such record carriers or containers therefor; Control thereof; Control of operating function
- G11B15/18—Driving; Starting; Stopping; Arrangements for control or regulation thereof
- G11B15/46—Controlling, regulating, or indicating speed
- G11B15/467—Controlling, regulating, or indicating speed in arrangements for recording or reproducing wherein both record carriers and heads are driven
- G11B15/473—Controlling, regulating, or indicating speed in arrangements for recording or reproducing wherein both record carriers and heads are driven by controlling the speed of the heads
- G11B15/4731—Controlling, regulating, or indicating speed in arrangements for recording or reproducing wherein both record carriers and heads are driven by controlling the speed of the heads control of headwheel rotation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/76—Television signal recording
- H04N5/91—Television signal processing therefor
- H04N5/93—Regeneration of the television signal or of selected parts thereof
- H04N5/932—Regeneration of analogue synchronisation signals
Definitions
- This invention generally relates to rotary head video tape recording and reproducing apparatus. More particularly, it relates to an apparatus and method for reducing objectionable signal timing errors caused by errors in the angular position of a rotating record/reproduce head, specially, static timing errors in the presence of dynamic timing errors.
- Rotary head tape recording and reproducing apparatus transfer information to and from a tape longitudinally transported between supply and take-up reels while one or more heads scan across the tape along parallel paths inclined at an angle to the length of the longitudinally transported tape.
- the stability of recording information on or reproducing information from the tape is dependent upon the rotational stability of the rotating head (or heads) and the longitudinal transport stability of the transported tape.
- Such apparatus traditionally includes a rotary head servo system and a tape transport servo system.
- the rotary head servo system and the tape transport servo system cooperate to keep the rotary head accurately positioned relative to the tape, with the rotary head servo system functioning to control the rotational speed and position of the rotary head while the tape transport servo system functions to control the longitudinal transport speed and position of the tape relative to the plane of rotation of the rotary head.
- the rotary head servo system exercises control over the rotary head by comparing a tachometer signal representative of the actual rotational speed and position of the rotary head with a reference signal indicative of the desired rotational speed and position.
- the reference signal is supplied by an external reference timing source, usually, a station or house sync signal.
- a feedback control system operatively associated with the rotary head provides the reference signal to the rotary head servo system, the provided reference signal being synchronous with the information signal reproduced by the rotary head.
- Such reference signal is often derived from a timing component signal included in the reproduced information signal.
- the rotary head servo system responds to the out of phase condition by adjusting the rotational position of the rotary head until a correct phase relationship between the compared signals is obtained.
- the foregoing rotary head position correction is performed during the reproduction from the tape of previously recorded information prior to the recording of the new information on the tape so that the rotary head is positioned relative to the tape to record the new information synchronously with information previously recorded on the tape.
- the feedback reference signal hence, the rotary head sevo system, is locked to the last known correct rotational position of the rotary head for the duration of the insert recording or edit operation to maintain such position for the duration of the operation.
- the tape transport servo system controls the longitudinal transport of the tape by comparing a tachometer signal representative of the actual longitudinal transport speed and position of the tape with a reference signal indicative of the desired longitudinal transport speed and position.
- a tachometer signal representative of the actual longitudinal transport speed and position of the tape
- a reference signal indicative of the desired longitudinal transport speed and position.
- the reference signal provided to the tape transport servo is obtained from the aforementioned external reference timing source.
- a feedback system operatively associated with the longitudinally transported tape provides the reference signal the provided reference signal being synchronous with the transport of the tape.
- such reference signal is derived from a control track signal longitudinally recorded along the tape at the same time the information is recorded by the rotary head along the parallel paths on the tape to identify the locations of the parallel paths in which information is recorded by the rotary head. If the transported tape is not properly positioned relative to the plane of rotation of the rotary head, the control track signal reproduced from the tape will produce a corresponding phase error condition in the tape transport servo system.
- the tape transport servo system responds to the phase error condition to adjust the transport of the tape until the phase error condition is eliminated.
- the tape transport servo system also operates in this manner to position the transported tape properly relative to the rotational plane of the rotary head during the reproduction of information from the tape prior to the recording of new information on the tape during an inserted record or edit operation.
- the tape transport servo system is locked to the last known correct tape position for the duration of the insert recording or edit operation to maintain such position for the duration of the operation.
- magnetic tape is transported about a cylindrical tape guide drum along a helical path as one or more magnetic transducers or heads are rotated to scan the tape.
- the tape When a single head is used, the tape usually is wrapped around the drum in a configuration which resembles the Greek letter omega ( ⁇ ) when viewed from above. Scanning of the tape is only interrupted in a drop-out zone located between entrance and exit guides that direct the tape into and out of the helical path about the tape quide drum.
- the video information is applied to the record head, which records the information along the tape on discrete parallel tracks that are inclined at an acute angle relative to the longitudinal direction of the tape. However, no information is recorded on the tracks by that head while it rotates through the drop-out zone between the entrance and exit guides, during which time the record head is not in a recording relationship with the tape.
- the speed and rotational phase position of the rotary head are synchronized when recording so that the head enters the drop-out area shortly after the beginning the vertical blanking interval separating active video information portions of two television fields, and preferably always after a particular pulse during the vertical sync period of the vertical blanking interval, such as the second vertical broad pulse.
- the head After the drop-out interval, which ends within several lines of the field following the vertical sync period, the head is again positioned in a recording sync period, the head is again positioned in a recording relationship with the tape. Since the lines forming the vertical blanking interval do not contain active video information, virtually none of the active video information is lost due to the rotational drop-out.
- a stationary control track head is located along the tape path about three inches from the tape exit guide, on the control track head and take-up reel side of the tape guide drum.
- the tape is transported under the control of a capstan located along the tape path at the opposite side of the tape guide drum.
- the control track head scans a longitudinal control track signal recorded along one edge of the tape.
- a control track signal is recorded on the control track, which is typically a video frame, or 1/2 field rate signal in the form of a 30 Hz square wave synchronized to the occurrence of the vertical sync signal of the video information simultaneously recorded on the tape.
- the control track signal is normally recorded so that its transitions are offset in position along the tape relative to the recorded vertical sync signal location by a distance corresponding to the length of the tape separating the control track head and the rotary head at the time the vertical sync signal is recorded.
- the rotation of the rotary head is controlled so that it passes through the drop-out zone during the occurrence of a middle part of the vertical blanking interval, the blanking interval spanning approximately 20 horizontal lines of the 262-1/2 lines constituting each television field interval (525 line format).
- a particular component forming the vertical blanking interval that is reliably recorded and reproduced during all operations is selected to control the rotary head servo.
- a convenient component selected for recording and reproducing apparatus capable of reproducing special motion effects, such as described in the Ravizza United States Patent US-A-4,163,993, is the second pre-equalizing pulse of the vertical blanking interval, which is generally always recorded and reproduced during normal and special effects modes of operation of the apparatus.
- the second pre-equalizing pulse is recorded at a physical location near the tape entrance guide when information is recorded and reproduced from the tape and is recorded by the rotary head just before the head enters the drop-out zone at the entrance guide and, therefore, is generally located about three inches plus the distance around the tape guide drum from the stationary control track head.
- the location of the second pre-equalizing pulse relative to the position of the control track head represents a substantial distance in terms of the length of tape.
- it may approximate twenty inches, since it is separated from the control track head by the length of tape that is wrapped around the tape guide drum. It should also be apparent that if a vertical sync pulse is recorded near the tape exit guide, the length of tape representing the amount of tape wrapped around the scanning drum would be eliminated and the distance between the control track head and a vertical synchronizing location on the tape immediately after the occurrence of the drop-out interval would be approximately only three inches.
- a time base corrector is virtually always used with a broadcast quality rotary head video tape recording and reproducing apparatus to correct timing errors that occur in the reproduced video information signal and such time base correctors can effectively correct timing errors that change on a line-by-line basis.
- TBC time base corrector
- Such large errors commonly occur during an insert edit recording operation because of the aforementioned variation in the head-to-tape track relationships from apparatus to apparatus.
- Even advanced time base correctors that are capable of making corrections up to a full television field interval are generally incapable of correcting instantaneous timing discontinuities that exceed about 30 microseconds, which represents approximately one-half of a horizontal line of video information. When a timing discontinuity exists that is greater than one-half horizontal line, a disruption may occur in the television signal timing that appears as a break-up in the display of the reproduced television signal, typically at the time of the reproduction of the recorded vertical sync signal.
- the rotary head servo system responds to the mistiming of the vertical sync signal by adjusting the position of the rotary head to eliminate the timing error determined from the reproduced vertical sync signal.
- the timing error By virtue of the static character of some timing errors, such as result from changes in the tape tension, however, the timing error progressively varies in a linear fashion during the following television field interval until the next vertical sync signal time, at which time a new determination and correction of static tape tension related errors occur.
- the existance of dynamic tape tension related errors, or other dynamic disturbing influences on the relative timing of the reproduced control track signal and vertical sync signal do not permit satisfactory determination of the actual static tape tension error by the aforedescribed technique for some purposes, particularly, where the precise determination of such static error is desirable.
- the synchronous recording of new video information with previously recorded video information during edit insert operations requires such precise determination in order to avoid undesirable timing discontinuities at the edit point.
- the magnitude of the timing discontinuity can grow over a series of edits as a result of the presence of the dynamic disturbing influences, which eventually may lead to a timing discontinuity exceeding the correction capability of the time base corrector associated with the recording and reproducing apparatus.
- Any application of the reproduced vertical sync signal requiring a precise determination of its timing relative to that of the recorded control track signal requires a precise determination of the static timing error between these signals.
- the tape is typically transported under the control of a capstan during recording and reproducing operations and the capstan servo is controlled by the control track signals during reproducing operations.
- the rotating head is controlled by the rotary head servo, which in turn is controlled by the vertical synchronizing signal during reproducing operations.
- the servos exercise control over the transport of the tape and the rotation of the head, respectively, relative to a common reference signal, usually provided by a reference timing signal source, such as studio sync or the like.
- a reference timing signal source such as studio sync or the like.
- An object of the present invention is to provide an improved method and apparatus which accomplishes the foregoing object by generating an artificial vertical sync signal from signal information that is reproduced from the tape.
- US-A-4257073 discloses a helical wrap recording and reproducing machine including means for obtaining a control signal indicative of the occurrence of a sync interval contained in an information signal recorded on a tape transported along a helical tape path about a rotating head as the head is rotated to reproduce the recorded information signal.
- the said information signal includes periodic sync timing signals and the control signal is obtained in response to the reproduction of a selected sync timing signal by the said rotating head from a selected location along the tape path.
- the invention provides a method of obtaining a control signal indicative of the occurrence of a sync interval contained in an information signal recorded on a tape transported along a helical tape path about a rotating head as the head is rotated to reproduce the recorded information signal, the transport of the tape being controlled in response to a control track signal reproduced from the tape by a control track head that is located outside the helical tape path and near one end of the tape path, said information signal including periodic sync timing signals and said control signal being obtained in response to the reproduction of a selected sync thing signal by the said rotating head from a selected location along the tape path, the method comprising detecting a component of the sync interval occurring at a different location, from which the said selected location is substantially displaced along the helical tape path towards said one end of the helical tape path; and detecting the selected sync timing signal at said selected location within a selected time interval occurring at a predetermined time after the detection of said component of the sync interval to provide a corresponding time related signal.
- the selected location and the said different location are usually near respective opposite ends of the helical tape path.
- the information signal is a television signal including periodic vertical sync intervals and periodic horizontal sync signals
- the detected component is a component of the vertical sync interval
- the detected selected sync timing signal is a selected horizontal sync signal.
- the invention provides a helical wrap magnetic video tape recording and reproducing machine including means for helically transporting a tape along a helical tape path about a rotary transducing head as the head is rotated to reproduce a recorded video information signal, which includes sync intervals and periodic sync timing signals; a control track head, which is located outside the helical tape path and near one end of the tape path, for reproducing from the tape a control track signal for use in controlling the transport of the tape; and apparatus for providing a selected control signal related in time to the occurrence of a sync interval, the apparatus being arranged to detect a selected component of a sync interval at one location of the tape path and to detect, within a selected time interval occurring at a predetermined time after the detection of said component of the sync interval, a selected sync timing signal occurring at a selected location, which is substantially displaced from the said one location along the helical tape path towards the said one end of the helical tape path, so as to provide the selected control signal.
- the machine has a tape entrance guide for directing the tape into said helical path and a tape exit guide for directing said tape out of the helical path, the said one location being adjacent the entrance guide and the said selected location being adjacent the exit guide, the entrance and exit guides being separated by a space defining a drop-out zone wherein said rotary transducing head is out of transducing relation with the tape, the signal information including vertical blanking intervals and horizontal synchronizing pulses recorded in a manner whereby a substantial portion of each vertical blanking interval occurs as a recording head traverses the drop-out zone so that such portions are not recorded, there being means for detecting the said selected component as a component of the recorded vertical blanking interval at said one location, means for providing a timing window signal at a predetermined time, subsequent to said detected vertical blanking interval component, which coincides with the occurrence at the selected location of a predetermined horizontal synchronizing pulse, constituting the said selected sync timing signal, recorded on the tape; means for detecting said predetermined horizontal synchron
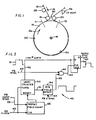
- FIG. 1 a portion of a helical rotary head magnetic video tape recording and reproducing apparatus is shown as transporting a magnetic recording tape 12 about a cylindrical tape guide drum 14 in a direction shown by the arrow 16.
- the tape 12 is guided by a tape entrance guide 18 to enter the helical path about the drum 14, is passed helically around the drum 14 and is guided by a tape exit guide 20 to leave the drum 14.
- the tape guide drum 14 consists of two axially displaced coaxial sections, one of which is mounted to a rotatable shaft 15 for rotation about the shaft's axis in the direction of arrow 26 and carries the heads 22 and 24 for rotation therewith.
- the head 22 is preferably used primarily for recording video information, but may be used to reproduce recorded information, if desired, such as during the reproduction of recorded video information prior to recording of new information on the tape when edits are performed.
- the head 24 is a dedicated video reproduce head, and is angularly displaced about 120° relative to the head 22 in a direction opposite to the direction of rotation of the heads.
- the apparatus has a rotary head servo mechanism for controlling the rotational velocity and angular phase or position of the rotating heads so as to be synchronized to the occurrence of the vertical sync signal extracted from the reproduced video information.
- the apparatus records a video information signal so that a substantial portion of the vertical blanking interval occurs during the time the reproduce head passes through the drop-out zone 30.
- An artificial vertical sync signal which can be used to control the rotary head servo and which is less susceptible to timing variations between the occurrences of the control track signal and the vertical sync signal is generated in the following manner.
- Circuitry detects a component of the vertical blanking interval, such as the second pre-equalizing pulse, generally reproduced from a location 11 on the tape 12 adjacent the tape entrance guide 18 when, for example, the head 22 is at the corresponding location in its rotation about the axis of the shaft 15.
- the second pre-equalizing pulse is reproduced from the tape 12 on the side of the drop-out zone 30 that is opposite the side having the control track head 46.
- a counting means triggered by the reproduced second pre-equalizing pulse provides a timing window signal 31 (FIGS. 2(D) and 3) after a predetermined time, which corresponds to the time required for the head 22 to rotate from the location 11 to a location that is on the opposite side of the drop-out zone 30 adjacent the exit guide 20.
- a predetermined horizontal synchronizing pulse within the window 31 is then detected and defined as the artificial vertical sync signal that is used by the rotary head servo to control the speed and phase of the rotating heads.
- the speed and phase of the transport of the tape 12 are controlled by a capstan drive means 28 or the like, and the speed and phase of the rotating section of the drum 14, hence, heads 22 and 24 are controlled by a rotary head servo, a preferred embodiment of which illustrated in FIG. 4. While the tape 12 is transported at about 10 inches per second, the rotary heads rotate at a rate of 50 revolutions per second in 50 Hz line standard recording and reproducing apparatus or 60 revolutions per second in 60 Hz line standard apparatus.
- the head 22 records video information on the tape 12 along discrete parallel tracks that are inclined at an angle relative to the longitudinal direction of the tape.
- Each field of video information includes a vertical blanking interval containing vertical synchronizing information, as shown in FIGS. 2(A) and 2(B).
- the interval occurs between successive television fields, and includes a series of pre-equalizing pulses, vertical sync pulses, sometimes referred to as broad pulses, post-equalizing pulses and horizontal sync pulses, as shown.
- the vertical blanking interval occupies an interval corresponding to about twenty horizontal lines of video information.
- Each television frame is composed of two interlaced consecutive fields, designated the "even” field, partially shown in FIG. 2(A) with line numbers, and the "odd” field, shown partially in FIG. 2(B) with line numbers.
- the speed and angular position or phase of the drum 14 carrying the rotary heads 22 and 24 is controlled by the rotary head servo synchronized to the occurrence of vertical sync recorded on the tape 12.
- the rotary head servo controls the rotational speed and phase of the rotary heads (FIG. 1) so that the head 22 (which will be the head considered to be selected for reproducing video information in the description of the preferred embodiment of the present invention) enters the drop-out zone 30 shortly after reproducing a particular pulse contained in the vertical blanking interval recorded on the tape 12.
- the second pre-equalizing pulse approximately at a point 1 in FIG. 2(A) is reproduced before the head 22 enters the drop-out zone 30 and is the last part of the information in the vertical interval that is reproduced.
- the relationship between the occurrence of the vertical blanking interval and the occurrence of the drop-out is shown by comparing FIGS. 2(A) and FIG. 2(C).
- the drop-out in the reproduced video information begins at the point 40, after the broad pulse 35, and ends at the point 42, which is before the last horizontal line 44 in the vertical blanking interval.
- a control track head 46 is fixed in transducing relation to the tape 12 along the tape at a location which is about three inches from the tape exit guide 20.
- the control track head 46 preferably records a frame, or 1/2 X field, rate square wave control track signal along one edge of the tape 12 during recording operations, and reproduces the recorded control track signal during playback operations for use in servo controlling the transport of the tape 12.
- the method and apparatus of the present invention overcomes the adverse effects of dynamic and static timing errors that may result from changes in humidity, temperature, tape tension and other tape instability inducing factors which effectively alter the timing relationship between the control track and the vertical sync signals. This is accomplished in accordance with the present invention by the use of an artificial vertical sync signal that is derived from the active video information signal at a location along the tape path that is physically much closer to the control track head than along the tape path at which the vertical sync signal is reproduced. As shown in FIG.
- Vertical sync information extracted from the reproduced video information is commonly employed to maintain the rotational speed and position of the rotary head in acccordance with a desired speed and position as determined by a selected reference. As discussed hereinbefore, this is done during normal reproduce operations and edit record operations. Also, most recently, the vertically sync signal extracted from the reproduced video information has been employed to generate a synthetic control track signal, even when the tape on which the control track signal is recorded is stopped, i.e., at zero tape velocity.
- the artificial vertical sync signal use of that signal as a synthetic control track signal during zero or normal record and/or reproduce tape transport velocities of operation enables the exercise of effective control over the transport of the tape when the control track signal is unavailable (as when the tape is transported at zero tape velocity), is missing or is improperly recorded.
- the artificial vertical sync signal to generate the synthetic control track signal a more accurate representation of the actual vertical sync timing is obtained by virtue of it being obtained from a signal related in time to the actual vertical sync signal that is reproduced from the tape at a location along the tape path much closer to the location of the control track head.
- the rotational stability of the rotary head or heads hence, the stability of recording information on and reproducing information from the tape depends upon the ability of the rotary head servo system and tape transport servo system commonly included in rotary head tape recording and reproducing apparatus to keep the rotary head or heads accurately positioned relative to the tape.
- FIG. 4 a preferred embodiment of the rotary head servo 200 is illustrated as arranged to utilize the artificial vertical sync signal provided by the artificial vertical sync generator circuitry illustrated in FIG. 3, which will be described in detail hereinbelow with reference to FIGS. 3 and 5.
- Video information frequency modulated (FM) on a radio frequency (RF) carrier and recorded on the tape 12 (FIG. 1) is reproduced by the rotary head 22 as the tape is transported in a helical path around the tape guide drum 14.
- the reproduced FM video information is supplied to a typical video signal demodulator 201, which functions to remove the video information from the RF carrier.
- the demodulator 201 provides the demodulated video information signal on line 202, which extends to the input of a sync separator 204.
- Sync separator 204 functions to remove the composite sync information from the demodulated video signal present on line 202 and provide it over line 206 extending to the input of the artificial vertical sync generator 43.
- the generator 43 generates an artificial vertical sync timing related signal from the video composite sync information reproduced by the rotary head 22 when in transducing relation with the tape 12 (FIG. 1) near the exit guide 20 on the control track head 46 side of the tape guide drum 14. This reduces the amount of variation in the timing relationship between the reproduced control track signal and the artificially generated vertical sync signal since the length of tape separating the tape locations from which these signals are reproduced is substantially reduced.
- the artificially generated vertical sync signal provided by the generator 43 is coupled by line 207 to the input of a phase comparator 208.
- the phase comparator 208 operates to compare the phase between the artificial vertical sync signal present on line 207 with the vertical rate reference signal supplied at a reference input 210.
- these signals are at the two interlaced field or frame rate, which is 30 Hz for a 60 Hz field rate television signal standard.
- the vertical frame rate reference signal is typically supplied from an external source, generally termed "house sync" as is well known in the art.
- the amount of error detected by phase converter 208 represents the error in occurrence of the reproduced and artificially generated vertical sync signal relative to the occurrence of the vertical frame rate reference signal.
- the rotary head 22 is rotated to scan the tape by a motor 216, which is also linked to an associated tachometer disc 280.
- Tachometer signals are provided at the rate of the rotation of the head 22, or 60 Hz for a 60 Hz field rate television signal standard, and are obtained from the tachometer 280 and supplied to an error detecting means 220.
- Error detection means 220 serves to compare the actual rotational position of the rotary head 22 with the desired position as indicated by a reference signal present on line 222 and responsively generate the desired error correction signal applied to a motor drive circuit 226 via line 224.
- the motor drive circuit 226 responsively supplies the necessary drive signal to the motor 216 to correct any detected rotational position or speed errors of the head 22.
- the reference signal present on line 222 is generated by a variable phase adjustment means 228, which serves to adjust the phase of vertical field rate reference signal (60 Hz for a 60 Hz field rate television signal standard) in accordance with any error in occurrence of the reproduced and artificially generated vertical sync signal relative to the occurence of the vertical frame rate reference signal detected by the phase comparator 208.
- the rotary servo system 200 functions as thus described to maintain the rotary head 22 at the correct rotational speed and position.
- the rotary head servo system 200 When the record and reproduce apparatus is placed in an edit mode of operation to record new video information synchronous with previous recorded information, the rotary head servo system 200 also functions in the foregoing manner during the reproduction of information previously recorded on the tape so that the rotary head 22 is positioned relative to the tape to record the new information synchronously with information previsouly recorded on the tape.
- the variable phase adjustment means 228, hence, the rotary head servo system 200 is locked to the last known correct rotational position of the rotary head 22, as determined by the output of the phase comparator 208, for the duration of the insert recording or edit operation to maintain such position for the duration of the operation.
- the manner in which the artificial vertical sync signal is generated in accordance with the present invention can be better understood from FIG. 2(A) and 2(C).
- the vertical sync information is generally obtained from the tape before rotary head 22 (FIG. 1) enters the drop-out zone 30, which is to the left of the start 40 of the drop-out as seen in FIG. 2(C).
- the second pre-equalizing pulse 32 (FIG. 2(A))is ordinarily reliably present and reproducible from the tape 12 regardless of the changes in conditions between the recording and reproducing of information from the tape 11.
- the location of the second pre-equalizing pulse 32 is physically present approximately at the location 11 shown in FIG. 1.
- the present invention utilizes the second pre-equalizing pulse 32 to start a counter which counts during the time that the drop-out is occurring and starts a timing window 31 when the rotary head 22 arrives at the opposite side of the drop-out zone 30, i.e., to the right of the point 42 shown in FIG. 2(C), and point 13 in FIG. 1, which window is sufficiently wide to permit detection of a predetermined horizontal sync pulse, for use in the generation of an artificial vertical sync signal for controlling the rotary head servo system 200 (FIG. 4). Because the location of the horizontal sync pulses are offset by 1/2 line from television field to television field, as is evident by comparing FIG. 2(A) which illustrates an even field and FIG. 2(B) which illustrates an odd field, the window 31 is only opened on even fields so as to detect a consistently reoccurring horizontal sync pulse.
- the tape may still experience dimensional variations due to changes in the temperature, humidity and other conditions, but the variations will only affect the movement of the timing window 31 that is opened for detection of a particular horizontal sync pulse.
- the occurrence of that pulse relative to the reproduction of the control track signal will be such that variations in the relative timing of these signals are influcenced by only approximately three inches (in recording and reproducing apparatus designed in accordance with the Type C Format standard) of separation between the location of the control track head 46 and the location of the rotary head 22 at the time of the reproduction of selected horizontal sync pulse, rather than a tape length of twenty inches that includes a length of tape around the tape guide drum 14, if the vertical sync signal was used instead.
- the artificial vertical sync signal generator 43 is shown in the block diagram of FIG. 3.
- the generator 43 includes a relatively large capacity field counter 48 which is clocked by a continuous 2H rate clock signal impressed on line 49, i.e., two times the frequency of the horizontal sync of the television signal.
- the 2H rate clock signal is derived from the composite sync signal contained in the reproduced video information.
- the field counter 48 is adapted to be reset by a field rate signal on line 33, which is preferably the second pre-equalizing pulse of the video information signal derived from either the record head 22, if it is being used in its reproducing mode such as would occur immediately prior to an insert edit operation, or from the reproduce head 24 during other reproducing operations During insert edit operations, it is highly desirable that rotational position of the head that is going to record the new information synchronously with the previously record information remains the same relative to the recorded control track signal after the insert edit recording is started.
- the record/reproduce head 22 is coupled to the artificial vertical sync generator 43 during the reproducing operation preceding the edit record operation to synchronize the rotational speed and position of the rotary head to the previously recorded information immediately prior to the start of the recording of the new video information.
- the field counter 48 preferably is reset by the second pre-equalizing pulse reproduced by the record/reproduce head 22 from the previously recorded information until the start of the insert edit recording operation.
- pre-equalizing pulses are no longer provided over line 33 to reset the field counter 48 and the counter cycles in accordance with the last received pre-equalizing pulse.
- the field counter 48 counts through a selected range and, upon reaching its terminal count, resets a vertical counter 50.
- the vertical counter is also clocked by the 2H clock signal on line 49.
- the vertical counter has an output line 52 which is at a high logic state signal level for two predetermined counts of the count interval of the vertical counter, or an interval corresponding to one horizontal line.
- the timing window signal 31 is formed by this 1H signal for detecting the selected horizontal sync pulse 44, as shown in FIGS. 2(A) and 2(D).
- a playback field detector 54 is provided which has an output line 55 that is at a logical high signal state and a low logical signal state on alternate fields of the reproduced video information signal.
- the field counter 48 resets the vertical counter 50, the counter 50 issues a timing signal on its output line 51 extending to the playback field detector 54. If an odd television field follows this resetting a horizontal sync pulse reproduced by the record and reproduce head 22 is simultaneously received by the detector over input line 53 extending from the playback sync separator. If an even television field follows such resetting, a horizontal sync pulse will not be present at the time at issuance of the timing signal by the counter 50, because of the one-half horizontal line interval offset in horizontal sync on alternate television fields.
- a coincidence between the timing signal issued by the vertical counter 50 and a reproduced horizontal sync pulse occurs only every other reproduced television field.
- the detector 54 places a high logic state signal on its output line 55, which lasts until the next resetting of the vertical counter 50.
- no coincidence occurs between the timing signal issued by the vertical counter 50 and a reproduced horizontal sync pulse.
- the output of the detector 54 is placed at a low logic state signal level, which last during the following television field interval.
- the timing of the resetting of the vertical counter 50 is selected so that the output of the detector 54 is high only during the odd fields of the reproduced television signal.
- the output line 55 of the detector 54 extends to one input of an AND gate 60 which has another input connected to input line 62 to receive the reproduced H sync signal separated from the video information being reproduced.
- the AND gate 60 is enabled during an odd numbered field, the occurrence of the H sync signal is passed through gate 60 to its output line 64 and clocks the flip-flop 56. Since the line 52 remains high for only two selected counts of the vertical counter 50, it defines the timing window signal 31 within which a horizontal sync may be selected.
- the horizontal sync pulse passing through gate 60 to line 64 during the interval of the 1H wide timing window signal 31 clocks the flip-flop 56 and its Q output on output line 57 goes to a high logic signal state, thereby defining the start of the artificial vertical sync signal.
- the width of the artificial vertical sync signal is terminated at the trailing edge of the timing window signal 31 provided on line 52, which is coupled to the clear input of the flip-flop 56.
- the field counter 48 counts 2H clock pulses from one preset number to another preset number. The value of the preset number depends upon whether the apparatus is operating to record and/or reproduce television signals in the 525 line format system, or in the 625 line format system.
- the field counter 48 is preset by the second pre-equalizing pulse of each vertical blanking interval provided over line 33. In the 525 line format system, the field counter 48 is preset to a count of 148.
- the counter 48 counts 2H pulses starting at a time that corresponds with the pre-equalizing pulse 32 in FIG. 2(A) until a count of 672 is reached, which constitutes a count interval corresponding to an entire field of 2H pulses.
- the counter 48 produces an output pulse which resets the vertical counter 50 to count 0.
- the counter 50 is also clocked by the 2H clock and counts from 0 to 63.
- the counter 50 At count 61 following the reset of the vertical counter 50, which corresponds to an interval of about 280 horizontal line intervals following the reset of the counter, hence, the 19th horizontal sync time of the second vertical blanking interval following such reset, the counter 50 generates the leading edge of the timing window signal 31 by causing its output 52 to a high logic state.
- the output of the field detector 54 is also high, which enables the AND gate 60.
- the horizontal synchronizing pulses reproduced from the tape by the head 22 and separated from the reproduced video information are coupled by line 62 to one input of the gate 60.
- the horizontal sync pulse which occurs while the high logic state timing window signal 31 is present on line 52 clocks the flip-flop 56, and its Q output goes high as previously described.
- the flip-flop 56 is cleared by the vertical counter 50 when its output on line 52 goes to a low logic state at a count of 63.
- the counter 50 stops counting at 63 until it is again reset by the field counter 48.
- the vertical counter 50 provides a timing window signal 31 during count states 61 and 62, which corresponds to a full horizontal line interval corresponding to the second half of horizontal line 19 and the first half of horizontal line 20 in FIG. 2(B). As will be appreciated from FIGS. 2B and 2D, this occurs after the head 22 passes through the drop-out zone 30 (FIG.
- the horizontal sync pulse which occurs in the window 31 defines the artificial vertical sync and is used to control the rotary head servo system 200, as previously described with reference to FIG. 4. If the relative timing between the reproduced video information and reproduced control track changes from that which existed during the recording of the video information, for example, as a result of a change in the static tape tension, timing errors will be introduced into the reproduced video information. However, the artificial vertical sync signal is reproduced from the helically transported tape 11 (FIG. 1) in accordance with the present invention at a time when the rotary head 22 is at the side the tape guide drum 14 closest to the control track head 46, which is about 3 inches along the tape path.
- the artificial vertical sync signal enables the generation of a synthetic control track signal that is closer to the actual timing of the recorded control track signal.
- Such synthetic control track signal is useful in the control of rotary head video tape recording and reproducing apparatus, particularly, where a control track related signal is required during the operation of the recording and reproducing apparatus when the transport of the tape is stopped.
- the timing window signal 31 may shift in time slightly as a result of variations between the control track signal and video information signal timing, in part because it is generated from information reproduced from the tape 12 at a point along the path of the tape which is about 20 inches from the location of the control track head 46.
- the timing window signal 31 shifts in time, the rotary head 22 will still be properly synchronized to the selected horizontal sync pulse used to form the artificial vertical sync signal.
- the field counter 48 provides the capability of easily adapting the invention for use with either the 525 or 625 horizontal line formats.
- the field counter 48 counts 525 lines, from 148 to 672.
- the field counter 48 counts 625 lines, from 48 to 672.
- the vertical counter 50 is reset to zero and starts counting by decoding a field counter 48 output of 648.
- FIG. 5 is a detailed schematic drawing of the circuitry of a preferred embodiment of the artificial vertical sync signal generator 43 of this invention.
- Horizontal sync signals included in the video information reproduced from the tape by head 22 and separated therefrom by a common sync signal separator are coupled to the input line 62 extending to the gate 60.
- the 2H clock signal is derived from the horizontal sync signal included in the reproduced video information, multiplied in conventional fashion and supplied by circuitry (not shown) over the line 49 extending to the input of a monostable multivibrator, or one-shot 68.
- the one-shot 68 serves to retime the 2H clock signal for clocking the field counter 48 and the vertical counter 50 at the desired 2H rate.
- the field counter 48 is preset to a predetermined number by a PROM 70 determined by the horizontal line format standard signal provided on the control line 69 in accordance with the line format standard which the recording and reproducing apparatus is conditioned to record and/or reproduce.
- the field counter 48 is preset to its preset number of 148 (for the 525 line format) or 48 (for the 625 line format) by the horizontal line format standard signal provided on the control line 69. This signal addresses the PROM to provide the appropriate preset number to the field counter 48.
- Decoding gates 78, 80, 81 and 82 detect an output provided by the field counter 48 corresponding to a count of 648.
- the output of the gate 82 is inverted, and connected to an input line 71 extending to one input of a NOR gate 84, which causes the vertical counter 50 to be reset to zero upon the occurrence of a 648 count state at the output of field counter 48.
- the counter 73 part of the vertical counter 50 provides an output corresponding to counts of 61 and 62, which are decoded by a vertical PROM 86 to provide corresponding outputs to a buffer 88.
- Selected output lines of the buffer 88 are applied to following logic circuitry, including gates 90, 92 and 94, and the output of the gate 94 is at a high logic state signal while the vertical counter 50 is in count states 61 and 62.
- This high logic state signal is applied to the D input of the flip-flop 56. If a sync pulse appears on line 62 during the 1H high logic state signal interval, the flip-flop 56 will be clocked to provide a high logic state on its Q output line 57, which is the artificial vertical sync signal as previously discussed.
- the even and odd fields are identified by the field detector 54 as previously described, which is defined by a pair of flip-flops 73 and 75.
- the first flip-flop 73 receives the reproduced H sync pulses over line 53, and if one occurs during the interval that the vertical counter 50 is in its reset condition, the flip-flop 73 clocks the following flip-flop 75.
- on output line 77 extending from the buffer 88 to the D input of the flip-flop 75 is at a logic state that results in a high logic level signal being placed on the output line 55 extending to the gate 60.
- gate 60 is enabled by this signal condition on line 55 to pass the horizontal sync pulse that results in the generation of the artificial vertical sync signal by the flip-flop 56.
- the flip-flop 75 provides a low logic level signal on output line 55 that disables the gate 60.
- gate 60 is enabled by the playback field detector 54 when odd television fields are reproduced following a reset of the vertical counter 50 and disabled when alternate even television fields are reproduced following such reset.
- the field counter 48 is arranged to self preset when it reaches its terminal count. This is performed by the gate 74 that decodes the output of the field counter 48.
- the present invention produces an artificial vertical sync signal that is derived from a selected part of video information signals that are reproduced from the tape at a location in the tape path which is physically much closer to the location of the control track head than the tape location of the conventionally used vertical sync signal.
- the artificial vertical sync signal is advantageously used to control the rotary head servo in a manner to achieve improved synchronization of the rotational speed and position of the rotary head.
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Television Signal Processing For Recording (AREA)
- Adjustment Of The Magnetic Head Position Track Following On Tapes (AREA)
Claims (9)
- Procédé pour obtenir un signal de commande représentatif de l'apparition d'un intervalle de synchro contenu dans un signal d'information enregistré sur une bande (12) transportée le long d'un trajet de bande hélicoïdal autour d'une tête rotative (22) tandis que la tête est entraînée en rotation pour reproduire le signal d'information enregistré, le transport de la bande étant commandé en réponse à un signal de piste de pilotage reproduit à partir de la bande par une tête de piste de pilotage qui est située à l'extérieur du trajet de bande hélicoïdal et à proximité d'une extrémité du trajet de la bande, ledit signal d'information comprenant des signaux de synchronisation de synchro périodiques et ledit signal de commande étant obtenu en réponse à la reproduction, par ladite tête rotative, d'un signal de synchronisation de synchro sélectionné, à partir d'un emplacement sélectionné (13) le long du trajet de la bande, le procédé consistant à détecter une composante (32) de l'intervalle de synchro apparaissant en un emplacement différent (11), à partir duquel ledit emplacement sélectionné est sensiblement décalé le long du trajet de bande hélicoïdal vers ladite extrémité du trajet de bande hélicoïdal; et à détecter le signal de synchronisation de synchro sélectionné (44) au niveau dudit emplacement sélectionné (13) à l'intérieur d'un intervalle de temps sélectionné (31), à un moment prédéterminé après la détection de ladite composante de l'intervalle de synchro, afin de fournir un signal correspondant ayant un rapport temporel.
- Procédé selon la revendication 1, dans lequel l'emplacement sélectionné (13) et ledit emplacement différent (11) sont situés à proximité d'extrémités opposées respectives du trajet de bande hélicoïdal.
- Procédé selon la revendication 1 ou la revendication 2, dans lequel le signal d'information est un signal de télévision comprenant des intervalles de synchro verticale périodiques et des signaux de synchro horizontale périodiques, ladite composante détectée (32) est une composante de l'intervalle de synchro verticale, et ledit signal de synchronisation de synchro sélectionné détecté (44) est un signal de synchro horizontale sélectionné.
- Machine d'enregistrement et de reproduction sur bande vidéo magnétique du type à enroulement hélicoïdal, comprenant des moyens pour transporter hélicoïdalement une bande le long d'un trajet de bande hélicoïdal autour d'une tête de transduction rotative tandis que la tête est entraînée en rotation pour reproduire un signal d'information vidéo enregistré, qui comprend des intervalles de synchro et des signaux de synchronisation de synchro périodiques; une tête de piste de pilotage, qui est située à l'extérieur du trajet de bande hélicoïdal et à proximité d'une extrémité du trajet de bande, pour reproduire à partir de la bande un signal de piste de pilotage destiné à être utilisé pour la commande du transport de la bande; et un appareil pour fournir un signal de commande sélectionné ayant un rapport temporel avec l'apparition d'un intervalle de synchro, l'appareil étant conçu pour détecter une composante sélectionnée d'un intervalle de synchro au niveau d'un emplacement (11) du trajet de bande et pour détecter, à l'intérieur d'un intervalle de temps sélectionné apparaissant à un moment prédéterminé après la détection de ladite composante de l'intervalle de synchro, un signal de synchronisation de synchro sélectionné apparaissant en un emplacement sélectionné (13), qui est sensiblement décalé dudit emplacement le long du trajet de bande hélicoïdal vers ladite extrémité du trajet de bande hélicoïdal, de façon à fournir le signal de commande sélectionné.
- Machine selon la revendication 4, dans laquelle ledit emplacement et ledit emplacement sélectionné sont situés à proximité des extrémités opposées respectives du trajet de bande hélicoïdal.
- Machine selon la revendication 4 et comportant un guide d'entrée de bande (18) pour guider l'introduction de la bande dans ledit trajet hélicoïdal, et un guide de sortie de bande (20) pour guider la sortie de la bande hors du trajet hélicoïdal, ledit emplacement étant adjacent au guide d'entrée et ledit emplacement sélectionné étant adjacent au guide de sortie, les guides d'entrée et de sortie étant séparés par un espace (30) définissant une zone morte dans laquelle la tête de transduction rotative n'est plus en rapport de transduction avec la bande, le signal d'information comprenant des intervalles de suppression verticale et des impulsions de synchronisation horizontale dont l'enregistrement est effectué de manière à ce qu'une partie importante de chaque intervalle de suppression verticale se produise tandis qu'une tête d'enregistrement traverse la zone morte de sorte que ces parties ne soient pas enregistrées, des moyens (22, 23) étant prévus pour détecter ladite composante sélectionnée en tant que composante de l'intervalle de suppression verticale enregistré, au niveau dudit emplacement (11), des moyens (48, 49, 50, 52) étant prévus pour fournir un signal de fenêtre de synchronisation (31) à un moment prédéterminé, venant après ladite composante de l'intervalle de suppression verticale détectée, qui coïncide avec l'apparition, à l'emplacement sélectionné (13), d'une impulsion de synchronisation horizontale prédéterminée, constituant ledit signal de synchronisation de synchro sélectionné, enregistrée sur la bande; des moyens (22, 62, 60) étant prévus pour détecter ladite impulsion de synchronisation horizontale prédéterminée audit emplacement sélectionné et des moyens (36) étant prévus pour générer ledit signal associé à la composante de l'intervalle de suppression verticale sélectionné, en réponse à la coïncidence entre le signal de fenêtre de synchronisation et l'impulsion de synchronisation horizontale prédéterminée.
- Machine selon la revendication 6, dans laquelle l'impulsion de synchronisation horizontale prédéterminée se produit toutes les deux trames des informations vidéo; et comprenant en outre des moyens (54) pour détecter toutes les deux trames dans lesquelles se produit ladite impulsion de synchronisation horizontale prédéterminée et valider les moyens de détection de ladite impulsion de synchronisation horizontale prédéterminée en réponse à la détection de toutes les deux trames susdites.
- Machine selon la revendication 7, dans laquelle lesdits moyens pour détecter toutes les deux trames dans lesquelles se produit ladite impulsion de synchronisation horizontale prédéterminée comprend des moyens de détection de trame (54) pour identifier une trame sélectionnée d'une séquence répétée de trames constituant lesdites informations vidéo, lesdits moyens (60) pour détecter l'impulsion de synchronisation horizontale prédéterminée réagissant auxdits moyens de détection de trame pour coupler ladite impulsion de synchronisation horizontale prédéterminée aux moyens (56) destinés à produire le signal associé à la composante de suppression verticale en réponse à l'identification de ladite trame sélectionnée.
- Machine selon l'une quelconque des revendications 6 à 8, dans laquelle lesdits moyens destinés à fournir ledit signal de fenêtre de synchronisation comprennent des moyens de comptage (48, 50) pour générer le signal de fenêtre de synchronisation en réponse à un comptage d'un nombre prédéterminé de signaux d'horloge, lesdits moyens de comptage étant réglés en vue de compter des signaux d'horloge en réponse à la détection de la composante de l'intervalle de suppression verticale sélectionnée et pilotés pour compter en réponse à un signal d'horloge associé aux impulsions de synchronisation horizontale.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AT88117506T ATE84654T1 (de) | 1982-09-17 | 1982-10-27 | Verfahren und vorrichtung zum erzeugen eines kuenstlichen synchronisiersignals. |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US8201281 | 1982-09-17 | ||
| WOPCT/US82/01281 | 1982-09-17 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP82903614.4 Division | 1982-10-27 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP0311143A2 EP0311143A2 (fr) | 1989-04-12 |
| EP0311143A3 EP0311143A3 (en) | 1989-05-24 |
| EP0311143B1 true EP0311143B1 (fr) | 1993-01-13 |
Family
ID=22168203
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19880117506 Expired - Lifetime EP0311143B1 (fr) | 1982-09-17 | 1982-10-27 | Méthode et dispositif de production d'un signal artificiel de synchronisation |
| EP19820903614 Expired EP0119199B1 (fr) | 1982-09-17 | 1982-10-27 | Procede et dispositif de production d'un signal artificiel de synchronisation verticale pour l'enregistrement video sur bande magnetique |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19820903614 Expired EP0119199B1 (fr) | 1982-09-17 | 1982-10-27 | Procede et dispositif de production d'un signal artificiel de synchronisation verticale pour l'enregistrement video sur bande magnetique |
Country Status (3)
| Country | Link |
|---|---|
| EP (2) | EP0311143B1 (fr) |
| DE (1) | DE3280424T2 (fr) |
| WO (1) | WO1984001253A1 (fr) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61101181A (ja) * | 1984-10-23 | 1986-05-20 | Mitsubishi Electric Corp | 間欠磁気記録装置 |
| US5305106A (en) * | 1989-09-20 | 1994-04-19 | Canon Kabushiki Kaisha | Image signal reproducing apparatus having a synchronizing signal generator |
| KR930010360B1 (ko) * | 1990-10-31 | 1993-10-16 | 삼성전자 주식회사 | 동기신호복원회로 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL258399A (fr) * | 1959-11-30 | |||
| US3059052A (en) * | 1960-11-28 | 1962-10-16 | Ampex | Signal generator |
| DE1412410A1 (de) * | 1961-12-29 | 1968-10-03 | Loewe Opta Gmbh | Verfahren zur Zeilensynchronisierung fuer die Wiedergabe magnetischer Fernsehaufzeichnungen |
| US3322892A (en) * | 1962-12-27 | 1967-05-30 | Matsushita Electric Ind Co Ltd | Television signal recording and reproducing with sync signal regeneration |
| US3407266A (en) * | 1964-01-29 | 1968-10-22 | Tokyo Shibaura Electric Co | System for reproducing magnetically recorded television signals including a verticalsync pulse generator |
| US3573359A (en) * | 1968-05-06 | 1971-04-06 | Ampex | Video tape apparatus having sync signal control dropout compensation |
| DE1762475A1 (de) * | 1968-06-22 | 1970-06-18 | Telefunken Patent | Anordnung zur phasengenauen Drehzahlregelung einer rotierenden Welle |
| NL6811420A (fr) * | 1968-08-09 | 1970-02-11 | ||
| GB1247694A (en) * | 1968-10-10 | 1971-09-29 | Pye Ltd | Television vertical blanking pulse generators |
| US4086520A (en) * | 1973-10-01 | 1978-04-25 | Sony Corporation | Speed and phase control system |
| JPS54114691A (en) * | 1978-02-27 | 1979-09-06 | Sony Corp | Servo circuit |
| JPS54132120A (en) * | 1978-04-06 | 1979-10-13 | Sony Corp | Reproduction device of video signal |
| JPS5545151A (en) * | 1978-09-27 | 1980-03-29 | Hitachi Ltd | Detection circuit for vertical synchronizing signal |
| JPS5613882A (en) * | 1979-07-13 | 1981-02-10 | Toshiba Corp | Synchronous stabilizing device for video tape recorder |
| JPS5652977A (en) * | 1979-10-08 | 1981-05-12 | Sony Corp | Video signal reproducing device |
| JPS56115084A (en) * | 1980-02-16 | 1981-09-10 | Sony Corp | Video signal reproducer |
| JPS5714258A (en) * | 1980-06-30 | 1982-01-25 | Mitsubishi Electric Corp | Field discrimination circuit for television signal |
-
1982
- 1982-10-27 WO PCT/US1982/001523 patent/WO1984001253A1/fr active IP Right Grant
- 1982-10-27 DE DE19823280424 patent/DE3280424T2/de not_active Expired - Fee Related
- 1982-10-27 EP EP19880117506 patent/EP0311143B1/fr not_active Expired - Lifetime
- 1982-10-27 EP EP19820903614 patent/EP0119199B1/fr not_active Expired
Also Published As
| Publication number | Publication date |
|---|---|
| EP0311143A3 (en) | 1989-05-24 |
| WO1984001253A1 (fr) | 1984-03-29 |
| EP0119199B1 (fr) | 1990-02-28 |
| EP0311143A2 (fr) | 1989-04-12 |
| EP0119199A1 (fr) | 1984-09-26 |
| DE3280424D1 (de) | 1993-02-25 |
| EP0119199A4 (fr) | 1986-02-13 |
| DE3280424T2 (de) | 1993-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0091188B1 (fr) | Servo-système multiple commandé par un microprocesseur pour appareil d'enregistrement et/ou de reproduction | |
| US4531162A (en) | Noise control circuit for slow-motion/still-motion video reproduction system | |
| US5057949A (en) | Digital magnetic reproducing apparatus with variable tape speed | |
| USRE29787E (en) | Color phase matching system for magnetic video tape recordings | |
| US4120008A (en) | Overlap track servo for dynamic position correction in a rotary-head tape recorder | |
| US4322757A (en) | Servo control apparatus for adjusting the phase of a rotary head assembly to correct for errors which may occur due to changes in operating characteristics, while minimizing phase errors during edit operations | |
| CA1147457A (fr) | Methode et dispositif de selection de piste | |
| US3651276A (en) | Automatic phasing of servo systems | |
| US4257073A (en) | Quasi-vertical synchronizing signal generator | |
| JPS6053951B2 (ja) | 記録されたビデオ信号を記録とは異つた速度で再生する方法および回路装置 | |
| EP0091189B1 (fr) | Servo-système amélioré de suivi automatique de pistes | |
| US4635138A (en) | Microprocessor controlled reproducing apparatus having asynchronous reproducing capability | |
| CA1193005A (fr) | Systeme de centrage automatique pour magnetoscope a balayage helicoidal | |
| US4672474A (en) | Synthetic control track signal producing apparatus for video tape machines | |
| EP0311143B1 (fr) | Méthode et dispositif de production d'un signal artificiel de synchronisation | |
| US4890169A (en) | Magnetic tape recording and/or reproducing apparatus with slow motion effect | |
| US5490017A (en) | Signal reproducing apparatus | |
| EP0091187B1 (fr) | Appareil de reproduction contrôlé par un microprocesseur avec capacité de reproduction asynchrone | |
| KR100286067B1 (ko) | 데이타 재생 장치 | |
| JPH1011844A (ja) | オートトラッキング装置 | |
| EP0104023B1 (fr) | Appareil et procédé produisant un signal synthétique de piste de commande pour machines à bande vidéo | |
| EP0419370A2 (fr) | Dispositif de reproduction d'un signal numérique enregistré sur une bande magnétique | |
| Harris | Time-base errors and their correction in magnetic television recorders | |
| EP0119200B1 (fr) | Appareil d'enregistrement et de reproduction video pour le reglage du deplacement de bande | |
| EP0337582B1 (fr) | Système d'asservissement pour enregistreur vidéo pouvant se verrouiller à grande vitesse sur une piste de commande |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 119199 Country of ref document: EP |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE CH DE FR GB LI LU NL SE |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE CH DE FR GB LI LU NL SE |
|
| 17P | Request for examination filed |
Effective date: 19890529 |
|
| 17Q | First examination report despatched |
Effective date: 19910325 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 119199 Country of ref document: EP |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH DE FR GB LI LU NL SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Effective date: 19930113 Ref country code: LI Effective date: 19930113 Ref country code: CH Effective date: 19930113 Ref country code: BE Effective date: 19930113 |
|
| REF | Corresponds to: |
Ref document number: 84654 Country of ref document: AT Date of ref document: 19930115 Kind code of ref document: T |
|
| REF | Corresponds to: |
Ref document number: 3280424 Country of ref document: DE Date of ref document: 19930225 |
|
| ET | Fr: translation filed | ||
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 19931007 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 19931011 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19931019 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19931021 Year of fee payment: 12 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19931031 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 19931031 Year of fee payment: 12 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: 732E |
|
| 26N | No opposition filed | ||
| NLS | Nl: assignments of ep-patents |
Owner name: AMPEX SYSTEMS CORPORATION TE REDWOOD CITY, CALIFOR |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Effective date: 19941027 Ref country code: AT Effective date: 19941027 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Effective date: 19950501 |
|
| NLV4 | Nl: lapsed or anulled due to non-payment of the annual fee | ||
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 19941027 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Effective date: 19950630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Effective date: 19950701 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |