EP0148727A1 - Mécanisme d'enroulement d'un tissu pour métier à tricoter circulaire - Google Patents
Mécanisme d'enroulement d'un tissu pour métier à tricoter circulaire Download PDFInfo
- Publication number
- EP0148727A1 EP0148727A1 EP84810596A EP84810596A EP0148727A1 EP 0148727 A1 EP0148727 A1 EP 0148727A1 EP 84810596 A EP84810596 A EP 84810596A EP 84810596 A EP84810596 A EP 84810596A EP 0148727 A1 EP0148727 A1 EP 0148727A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- fabric
- roller
- axis
- stirrup
- pair
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images

Classifications
-
- D—TEXTILES; PAPER
- D04—BRAIDING; LACE-MAKING; KNITTING; TRIMMINGS; NON-WOVEN FABRICS
- D04B—KNITTING
- D04B15/00—Details of, or auxiliary devices incorporated in, weft knitting machines, restricted to machines of this kind
- D04B15/88—Take-up or draw-off devices for knitting products
Definitions
- the subject of the present invention is a mechanism for winding a fabric for a circular knitting machine comprising at least two pinch rollers for the fabric arranged in a horizontal plane and between which the fabric passes after having surrounded a portion of the first roller and the leaves after having surrounded a portion of the second roller, a winding bar and means for driving these rollers and this bar.
- the pinch rollers of the fabric have the role of exerting a determined traction on the knitting and thus ensuring the regularity of the stitches.
- the winding roller is used to collect the knitted fabric with a certain tension which ensures an even width of the wound product. It has already been proposed to pass the knitting alternately below and above two or even three pinch rollers so that the friction generated between the rollers and the fabric reduces the passage of tension between the strands situated above and below. these rollers.
- any slippage of the knitted fabric is not excluded through the pinch rollers, on the other hand, the diameter of the winding roller varies constantly, which implies a variable drive speed of the winding roller so that the winding tension is constant.
- the patent CH-A-501 084 relates to a magnetic braking device comprising a magnet, a lever actuating this magnet and the position of which depends on the diameter of the roll of fabric. As this diameter increases, the lever approaches the magnet of a drum integral with the axis of the fabric roll and brakes it.
- Patent CH-A-539,156 relates to a device in which the fabric extraction roller is kinematically integral with the needle bed and is therefore driven positively at a speed proportional to that of the needle bed. Such a solution does not solve the problem of the possible sliding of the fabric between the pinch rollers or that of the drive of the winding roller.
- the object of the present invention is precisely to solve this problem.
- the subject of this invention is a mechanism for winding a fabric for a circular knitting machine according to claim 1.
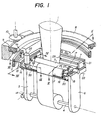
- Fig. 1 only illustrates the knitting winding mechanism produced by the circular knitting loom which has not been shown.
- This knitting is in the form of a tube 1 which is flattened between two pinch rollers 2 and 3 before winding the fabric on a winding bar 4 rotatably mounted around its longitudinal axis between two arms 5 and 6 of a stirrup 7 secured to a ring gear 8 mounted relatively in a circular slide re 9 secured to the frame of the loom and engaged with a drive pinion 10 kinematically connected to the motor mechanism (not shown) intended to rotate the needle bed.
- the winding bar 4 carries a pinion 12 (fig. 3) at one end engaged with a worm 13 of a direct drive motor 14 (fig. 1).
- the electric power is supplied by a double circular conductive track 11 against which two sensors 11a rubbed against the caliper 7 rub.
- the pinch rollers 2 and 3 are rotatably mounted between two arms 15 and 16 of a tilting stirrup 17.
- This stirrup 17 is articulated around an axis 18 passing through the generatrix of the roll 2 (fig. 2) at the location where the knitting 1 leaves this roller 2, and secured to two arms 19 and 20 of a second tilting stirrup 21 articulated around an axis 22 passing through the generatrix of the pinch roller 3 at the place where the knitting 1 enters contact with this roller, and secured to the arms 5 and 6 of the stirrup 7 secured to the ring gear 8.
- Two bars 35 and 36 are fixed between the arms 19 and 20 of the stirrup 21 and serve to keep constant the direction of the force exerted by the strand of fabric extending from the roller 2 to the bar of winding 4 whatever the diameter of the roll of fabric wound on this bar 4.
- the pinch roller 2 is integral with one end (FIG. 4) of a pinion 23 engaged with an endless screw 24 of the shaft of a DC drive motor 25, and at its other end ( Fig. 1) of a toothed gear 26 engaged with a toothed gear 27 secured to the pinch roller shaft 3.
- a first force sensor 28 (fig. 2) constituted by a strain gauge is disposed between the stirrup 7 secured to the toothed ring 8 and the tilting stirrup 21 articulated around the axis 22 and a second force sensor 29 is arranged between the tilting stirrup 21 and the tilting stirrup 17 articulated around the axis 18.
- Fig. 5 illustrates a block diagram of the electronic circuit intended to control the speed of the motor 14 or of the motor 25 to the force picked up by the force sensors 28 respectively 29. Since the control circuit is identical in both cases, only one of these circuits is shown and described.
- the force sensor 28 is connected by a preamplifier 30 to one of the inputs of a differential amplifier 31, the other input of which is connected to a reference potentiometer 32 which serves to display a voltage characteristic of the desired force on the sensor force 28.
- the output of the differential amplifier 31 is connected to a regulator 33 itself connected to a power amplifier 34 intended to supply the motor 14.
- the principle of adjustment of the mechanism for winding the knitted fabric consists in controlling the speed of the motor 14 to the tension of the knitting portion 1 extending from the pinch roller 2 to the knitting roller formed on the winding bar 4 and to control the speed of the motor 25 to the tension of the knitting portion extending between the pinch roller 3 and the needles integral with the needle bed (not shown).
- the pivot axis 18 of the tilting stirrup 17 being coincident with the generatrix of the pinch roller 2 at the place where the knitted fabric 1 leaves this roller 2 and the knitted fabric passes successively under the roller 3 between the rollers 2 and 3 and on the roller 2, the torque exerted on the stirrup 17 around the hinge axis 18 is directly proportional to the tension of the portion of fabric extending between the roller 3 and the needles of the fcnture (not shown).
- the tension of the knitting strand located between the roller 2 and the winding bar 4 does not enter the line of the joint because the lever arm of this force, the point of application of which coincides with the axis 18, is no.
- the knitting path between the pinch rollers 2 and 3 prevents to some extent the tension in the knitting strand extending between the roller 2 and the bar 4 from being transmitted to the other strand of knitting located upstream of the roll 3.
- the force measured by the force sensor 29 is very characteristic of the moment corresponding to the product of the force exerted by the knitting strand 1 extending between the roller 3 and the needles of the needle bed (not shown) tangentially to the roller 3, by the lever arm for applying this force relative to the tilting axis of the stirrup 17.
- the voltage emitted by the force sensor 29 is proportional to this mo ment so that the differential amplifier 31 and the regulator 33 regulate the power supply to the motor 25 according to the difference between the voltage emitted by the sensor 29 and that displayed by the setpoint potentiometer 32 and corresponding to the voltage desired mechanics in the strand of knitted fabric 1 extending upstream of the roller 3.
- the torque exerted on the stirrup 21 is proportional to the only force of the knitting strand extending between the roller 2 and the winding bar 4.
- the force proportional to this torque measured by the sensor 28 serves to adjust the tension motor supply 14.
- this supply voltage is adjusted by an electronic circuit identical to that of the motor 14 as a function of the reference voltage displayed on the reference potentiometer 32 and corresponding to the desired mechanical voltage in the strand of the knitting 1 extending downstream of the roll 2.
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Knitting Machines (AREA)
Abstract
Deux rouleaux de pincement (2, 3) sont montés entre deux bras d'un étrier (17) articulé autour d'un axe (18) solidaire d'un second étrier (21) articulé autour d'un axe (22). Ces rouleaux sont entraînés par un moteur (25) et le tricot est enroulé autour d'une barre de bobinage (3) entraînée par un moteur (14). Deux capteurs de force (28, 29) mesurent respectivement la tension exercée par le tricot (1) entre le rouleau (3) et la barre (4) par l'intermédiaire de l'étrier (21) articulé autour de l'axe (22) et la tension excercée par le tricot (1) entre le rouleau (2) et les aiguilles du métier à tricoter par l'intermédiaire de l'êtrier (17) articulé autour de l'axe (18). Comme les tensions du tricot sont confondues avec les axes (18, 22), les tensions appliquées à ces axes n'engendrent aucun couple sur les levers articulés à ces axes respectifs de sorte que les moteurs (14, 25) réglés par les capteurs (28, 29) ajustent indépendemment les tensions dans les brins du tricot en amont et en aval des rouleaux (2, 3).
Description
- La présente invention a pour objet un mécanisme d'enroulement d'un tissu pour métier à tricoter circulaire conprenant au moins deux rouleaux de pincement du tissu disposés dans un plan horizontal et entre lesquels le tissu passe après avoir entouré une portion du premier rouleau et les quitte après avoir entrouré une portion du second rouleau, une barre de bobinage et des moyens d'entraînement de ces rouleaux et de cette barre.
- Les rouleaux de pincement du tissu ont pour rôle d'exercer une traction déterminée sur le tricot et d'assurer ainsi la régularité des mailles. Le rouleau de bobinage sert à recueillir le tricot avec une certaine tension qui assure une largeur régulière du produit enroulé. On a déjà proposé de faire passer le tricot alternativement dessous et dessus deux, voire trois rouleaux de pincement de manière que les frottements engendrés entre les rouleaux et le tissu réduisent le passage de la tension entre les brins situés au-dessus et au-dessous de ces rouleaux.
- D'une part, tout glissement du tricot n'est pas exclu à travers les rouleaux de pincement, d'autre part, le diamètre du rouleau de bobinage varie constamment ce qui suppose une vitesse d'entraînement variable du rouleau de bobinage pour que la tension d'enroulement soit constante.
- Diverses solutions ont déjà été proposées pour tenter de résoudre ce problème. C'est ainsi que le brevet CH-A-501 084 se rapporte à un dispositif de freinage magnétique comprenant un aimant, un levier actionnant cet aimant et dont la position est fonction du diamètre du rouleau de tissu. Au fur et à mesure que ce diamètre croit, le levier approche l'aimant d'un tambour solidaire de l'axe du rouleau de tissu et le freine.
- Le brevet CH-A-539 156 est relatif à un dispositif dans lequel le rouleau d'extraction du tissu est cinématiquement solidaire de la fonture et est donc entraîné positivement à une vitesse proportionnelle à celle de la fonture. Une telle solution ne résoud pas le problème du glissement possible du tissu entre les rouleaux de pincement ni celui de l'entraînement du rouleau de bobinage.
- On a déjà proposé d'asservir le couple d'un moteur à courant continu destiné à entraîner les rouleaux de pincement du tissu à la tension de ce tissu, dans le brevet US-A-4 236 390. La mesure de cette tension et le mode d'entraînement du rouleau de bobinage ne sont pas décrits dans ce document.
- Il apparaît qu'aucune solution n'a été proposée jusqu'ici pour résoudre le problème qui consiste d'une part à tirer sur les aiguilles, d'autre part à enrouler le tricot à deux tensions respectives réglables indépendamment l'une de l'autre.
- Le but de la présente invention est précisément de résoudre ce problème.
- A cet effet, cette invention a pour objet un mécanisme d'enroulement d'un tissu pour machine à tricoter circulaire selon la revendication 1.
- Le dessin annexé illustre, schématiquement et à titre d'exemple, une forme d'exécution du mécanisme objet de l'invention.
- La fig. 1 est une vue en perspective de ce mécanisme.
- La fig. 2 est une vue en coupe selon la ligne II-II de la fig. 1.
- La fig. 3 est une vue en coupe selon la ligne III-III de la fig. 1
- La fig. 4 est une vue en coupe selon la ligne IV-IV de la figure 1.
- La fig. 5 est un schéma-bloc du circuit électrique de commnde des moteurs.
- La fig. 1 n'illustre que le mécanisme d'enroulement du tricot produit par le métier à tricoter circulaire qui n'a pas été représenté. Ce tricot se présente sous la forme d'un tube 1 que l'on ap- platit entre deux rouleaux de pincement 2 et 3 avant d'enrouler le tissu sur une barre de bobinage 4 montée rotativement autour de son axe longitudinal entre deux bras 5 et 6 d'un étrier 7 solidaire d'une couronne dentée 8 montée relativement dans une coulisse circulaire 9 solidaire du bâti du métier et en prise avec un pignon d'entraînement 10 relié cinématiquement au mécanisme moteur (non représenté) destiné à faire tourner la fonture. La barre de bobinage 4 porte un pignon 12 (fig. 3) à une extrémité en prise avec une vis sans fin 13 d'un moteur d'entraînement 14 à courant continu (fig. 1). L'alimentation électrique est fournie par une double piste conductrice circulaire 11 contre laquelle frottent deux capteurs lla solidaires de l'étrier 7.
- Les rouleaux de pincement 2 et 3 sont montés rotativement entre deux bras 15 et 16 d'un étrier basculant 17. Cet étrier 17 est articulé autour d'un axe 18 passant par la génératrice du rouleau 2 (fig. 2) à l'endroit où le tricot 1 quitte ce rouleau 2, et solidaire de deux bras 19 et 20 d'un second étrier basculant 21 articulé autour d'un axe 22 passant par la génératrice du rouleau de pincement 3 à l'endroit où le tricot 1 entre en contact avec ce rouleau, et solidaire des bras 5 et 6 de l'étrier 7 solidaire de la couronne dentée 8.
- Deux barres 35 et 36 (fig. 1 et 2) sont fixées entre les bras 19 et 20 de l'étrier 21 et servent à maintenir constante la direction de la force excercée par le brin de tissu s'étendant du rouleau 2 à la barre de bobinage 4 quel que soit le diamètre du rouleau de tissu enroulé sur cette barre 4.
- Le rouleau de pincement 2 est solidaire à une extrémité (fig. 4) d'un pignon 23 en prise avec une vis sans fin 24 de l'arbre d'un moteur d'entraînement 25 à courant continu, et à son autre extrémité (fig. 1) d'un renvoi denté 26 en prise avec un renvoi denté 27 solidaire de l'arbre du rouleau de pincement 3.
- Un premier capteur de force 28 (fig. 2) constitué par une jauge de contrainte est disposé entre l'étrier 7 solidaire de l'anneau denté 8 et l'étrier basculant 21 articulé autour de l'axe 22 et un second capteur de force 29 est disposé entre l'étrier basculant 21 et l'étrier basculant 17 articulé autour de l'axe 18.
- La fig. 5 illustre un schéma-bloc du circuit électronique destiné à asservir la vitesse du moteur 14 ou du moteur 25 à la force captée par les capteurs de force 28 respectivement 29. Etant donné que le circuit d'asservissement est identique dans les deux cas, seul l'un de ces circuits est représenté et décrit.
- Le capteur de force 28 est relié par un préamplificateur 30 à l'une des entrées d'un amplificateur différentiel 31 dont l'autre entrée est connectée à un potentiomètre de consigne 32 qui sert à afficher une tension caractéristique de la force désirée sur le capteur de force 28. La sortie de l'amplificateur différentiel 31 est connectée à un régulateur 33 lui-même connecté à un amplificateur de puissance 34 destiné à alimenter le moteur 14.
- Le principe de réglage du mécanisme d'enroulement du tissu tricoté consiste à asservir la vitesse du moteur 14 à la tension de la portion de tricot 1 s'étendant du rouleau de pincement 2 au rouleau de tricot formé sur la barre d'enroulement 4 et à asservir la vitesse du moteur 25 à la tension de la portion de tricot s'étendant entre le rouleau de pincement 3 et les aiguilles solidaires de la fonture (non représentée) . En effet, l'axe de pivotement 18 de l'étrier basculant 17 étant confondu avec la génératrice du rouleau de pincement 2 à l'endroit où le tricot 1 quitte ce rouleau 2 et le tricot passant successivement sous le rouleau 3 entre les rouleaux 2 et 3 et sur le rouleau 2, le couple exercé sur l'étrier 17 autour de l'axe d'articulation 18 est directement proportionnel à la tension de la portion de tissu s'étendant entre le rouleau 3 et les aiguilles de la fcnture (non représentée). La tension du brin de tricot situé entre le rouleau 2 et la barre d'enroulement 4 n'entre pas en ligne de coopte du fait que le bras de levier de cette force dont le point d'application est confondu avec l'axe 18 est nul. En outre, le parcours du tricot entre les rouleaux de pincement 2 et 3 empêche dans une certaine mesure la tension régnant dans le brin de tricot s'étendant entre le rouleau 2 et la barre 4 de se transmettre à l'autre brin du tricot situé en amont du rouleau 3. De toute façon, même s'il y a glissement du tricot entre les rouleaux 2 et 3, ceci se traduit par une variation de tension du tricot. Donc la force mesurée par le capteur de force 29 est bien caractéristique du moment correspondant au produit de la force exercée par le brin de tricot 1 s'étendant entre le rouleau 3 et les aiguilles de la fonture (non représentée) tangentiellement au rouleau 3, par le bras de levier d'application de cette force par rapport à l'axe de basculement de l'étrier 17. Par conséquent, la tension émise par le capteur de force 29 est proportionnelle à ce moment de sorte que l'amplificateur différentiel 31 et le régulateur 33 règlent l'alimentation du moteur 25 en fonction de l'écart entre la tension émise par le capteur 29 et celle affichée par le po- tentiornètre de consigne 32 et correspondant à la tension mécanique désirée dans le brin du tricot 1 s'étendant en amont du rouleau 3.
- Par contre, la force appliquée sur l'étrier 17 par ce brin du tissu s'étendant en amont du rouleau 3 étant confondue avec l'axe 22 de l'étrier 21, la force exercée par ce brin de tissu se décompose en deux forces appliquées respectivement sur l'axe 18 qui constitue le premier point d'appui de l'étrier 17 sur l'étrier 21 et sur le capteur 29, solidaire de l'étrier 21, constituant le second point d'appui. Ces forces se répartissant proportionnellement à leurs bras de levier respectifs par rapport au point d'application de la force, confondu avec l'axe 22 de l'étrier 21, aucun couple résultant n'est donc transmis à cet étrier 21 de sorte que cet étrier reste constamment en équilibre autour de son axe quelle que soit la force appliquée sur l'étrier 17 et que seul le capteur 29 mesure la force au second point d'appui de l'étrier 17 sans que cette force n'influence le capteur 28.
- Donc, le couple exercé sur l'étrier 21 est proportionnel à la seule force du brin de tricot s'étendant entre le rouleau 2 et la barre de bobinage 4. La force proportionnelle à ce couple mesuré par le capteur 28 sert à régler la tension d'alimentation du moteur 14.
- Comme décrit précédemnent pour le moteur 25, cette tension d'alimentation est réglée par un circuit électronique identique à celui du moteur 14 en fonction de la tension de référence affichée sur le potentiomètre de consigne 32 et correspondant à la tension mécanique désirée dans le brin du tricot 1 s'étendant en aval du rouleau 2.
Claims (3)
1.Mécanisme d'enroulement de tissu pour métier à tricoter circulaire comprenant un support (5,6,7) monté rotativement autour d'un axe vertical et portant au moins deux rouleaux (2,3) de pincement du tissu (1) disposés dans un plan horizontal et entre lesquels le tissu passe après avoir entouré une portion du premier rouleau (3) et les quitte après avoir entouré une autre portion du second rouleau (2), une barre de bobinage (4) et des moyens d'entraînement (14,25) de ces rouleaux (2,3) et de cette barre (4) caractérisé par le fait que les deux rouleaux de pincement (2,3) sont montés entre une première paire de bras parallèles (15,16) articulés autour d'un axe (18) passant par une génératrice dudit second rouleau (2) à l'endroit où le tissu (1) le quitte, cet axe étant solidaire d'une seconde paire de bras parallèles (19,20) articulés autour d'un axe (22) solidaire dudit support et passant par la génératrice du premier rouleau (3) à l'endroit où le tissu (1) entre en contact avec celui-ci, et par le fait qu'il comporte au moins un organe (29) pour mesurer la force entre la première paire de bras parallèles (15,16), soumise à la tension du tissu en amont des rouleaux de pincement et la seconde paire de bras parallèles (19,20) et un organe (28) pour mesurer la force entre la seconde paire de bras parallèles, soumise à la tension du tissu en aval des rouleaux de pincement et ledit support (5,6,7) et deux dispositifs (30 à 34) pour commander indépendamment les moyens d'entraînement (25,14) des rouleaux de pincement (2,3) et ceux de la barre de bobinage (4) en fonction desdites forces mesurées respectives.
2. Mécanisme selon la revendication 1, caractérisé par le fait que lesdits, moyens d'entraînement sont constitués par des moteurs électriques (14,25) à courant continu et que ledit support (5,6,7) porte deux capteurs (lla) alimentés par une piste électriquement conductrice circulaire (11) concentrique audit support.
3. Mécanisme selon la revendication 2, caractérisé par le fait que chacun desdits dispositifs (30-34) pour commander indépendamment les moteurs (14,25) à courant continu comportent chacun une jauge de contrainte (28,29) un potentiomètre de consigne (32) un amplificateur différentiel (31) dont les entrées sont reliées respectivement à ladite jauge et audit potentiomètre, un régulateur (33) et un amplificateur de puissance (34).
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CH6504/83 | 1983-12-06 | ||
| CH650483 | 1983-12-06 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP0148727A1 true EP0148727A1 (fr) | 1985-07-17 |
Family
ID=4310658
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19850900034 Withdrawn EP0163703A1 (fr) | 1983-12-06 | 1984-12-05 | Mecanisme d'enroulement d'un tissu pour metier a tricoter circulaire |
| EP84810596A Withdrawn EP0148727A1 (fr) | 1983-12-06 | 1984-12-05 | Mécanisme d'enroulement d'un tissu pour métier à tricoter circulaire |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19850900034 Withdrawn EP0163703A1 (fr) | 1983-12-06 | 1984-12-05 | Mecanisme d'enroulement d'un tissu pour metier a tricoter circulaire |
Country Status (2)
| Country | Link |
|---|---|
| EP (2) | EP0163703A1 (fr) |
| WO (1) | WO1985002633A1 (fr) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0591988A1 (fr) * | 1992-10-09 | 1994-04-13 | Precision Fukuhara Works, Ltd | Dispositif d'enroulement d'étoffe pour métier à tricoter circulaire |
| EP0622486A1 (fr) * | 1992-12-07 | 1994-11-02 | Precision Fukuhara Works, Ltd | Dispositif enrouleur d'étoffe pour métiers à tricoter circulaires |
| GB2316955A (en) * | 1996-09-05 | 1998-03-11 | Pai Lung Machinery Mill Co Ltd | A fabric rolling-up device with automatic torque increase circuit. |
| DE19833509B4 (de) * | 1997-07-25 | 2008-08-28 | Santoni S.P.A. | Rundstrickmaschine mit einer Zugvorrichtung für Strickware |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4879886A (en) * | 1987-05-01 | 1989-11-14 | Gunze Limited | Circular knitting machine |
| CN1191400C (zh) * | 1999-05-19 | 2005-03-02 | Sipra专利发展合作股份有限公司 | 用于引导在针织机上做出的针织品的辊子和具有该辊子的装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1267726A (fr) * | 1960-09-20 | 1961-07-21 | Maschf Augsburg Nuernberg Ag | Dispositif de réglage de la tension d'une bande de papier, en particulier entre les mécanismes d'impression des machines rotatives au moyen d'un ou de plusieurs rouleaux d'entraînement entraînés avec variation continue de la vitesse |
| GB1134169A (en) * | 1966-03-22 | 1968-11-20 | Gayley Wycombe Corp | Improvement in take-up apparatus for textile fabric webs |
| US3842627A (en) * | 1969-07-28 | 1974-10-22 | Travis Mills Corp | Means for rolling up tubular fabric produced by a circular knitting machine |
| DE2555948A1 (de) * | 1975-12-12 | 1977-06-16 | Schlafhorst & Co W | Verfahren und vorrichtung zur regelung der spannkraft eines bahnfoermig zugefuehrten gutes |
-
1984
- 1984-12-05 EP EP19850900034 patent/EP0163703A1/fr not_active Withdrawn
- 1984-12-05 WO PCT/CH1984/000190 patent/WO1985002633A1/fr unknown
- 1984-12-05 EP EP84810596A patent/EP0148727A1/fr not_active Withdrawn
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1267726A (fr) * | 1960-09-20 | 1961-07-21 | Maschf Augsburg Nuernberg Ag | Dispositif de réglage de la tension d'une bande de papier, en particulier entre les mécanismes d'impression des machines rotatives au moyen d'un ou de plusieurs rouleaux d'entraînement entraînés avec variation continue de la vitesse |
| GB1134169A (en) * | 1966-03-22 | 1968-11-20 | Gayley Wycombe Corp | Improvement in take-up apparatus for textile fabric webs |
| US3842627A (en) * | 1969-07-28 | 1974-10-22 | Travis Mills Corp | Means for rolling up tubular fabric produced by a circular knitting machine |
| DE2555948A1 (de) * | 1975-12-12 | 1977-06-16 | Schlafhorst & Co W | Verfahren und vorrichtung zur regelung der spannkraft eines bahnfoermig zugefuehrten gutes |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0591988A1 (fr) * | 1992-10-09 | 1994-04-13 | Precision Fukuhara Works, Ltd | Dispositif d'enroulement d'étoffe pour métier à tricoter circulaire |
| US5381676A (en) * | 1992-10-09 | 1995-01-17 | Precision Fukuhara Works, Ltd. | Fabric take-up mechanism for circular knitting machines |
| EP0622486A1 (fr) * | 1992-12-07 | 1994-11-02 | Precision Fukuhara Works, Ltd | Dispositif enrouleur d'étoffe pour métiers à tricoter circulaires |
| GB2316955A (en) * | 1996-09-05 | 1998-03-11 | Pai Lung Machinery Mill Co Ltd | A fabric rolling-up device with automatic torque increase circuit. |
| GB2316955B (en) * | 1996-09-05 | 2000-08-02 | Pai Lung Machinery Mill Co Ltd | Fabric rolling-up device and control circuit assembly |
| DE19833509B4 (de) * | 1997-07-25 | 2008-08-28 | Santoni S.P.A. | Rundstrickmaschine mit einer Zugvorrichtung für Strickware |
Also Published As
| Publication number | Publication date |
|---|---|
| EP0163703A1 (fr) | 1985-12-11 |
| WO1985002633A1 (fr) | 1985-06-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0046427B1 (fr) | Dispositif de liage pour presses à balles cylindriques | |
| US5133197A (en) | Apparatus for drawing knitted fabrics | |
| EP0148727A1 (fr) | Mécanisme d'enroulement d'un tissu pour métier à tricoter circulaire | |
| EP0357670B1 (fr) | Jigger | |
| EP0305230A1 (fr) | Dispositif d'alimentation pour une machine travaillant sur une nappe de matériau à l'arrêt, notamment pour une presse à découper à plat | |
| BE1001096A3 (fr) | Dispositif pour enrouler des nappes de matiere sur des rouleaux de reserve. | |
| US5317913A (en) | Apparatus for determining the sag of a running web of material transversely to its longitudinal direction | |
| FR2587681A3 (fr) | Appareil de soudage longitudinal dans une machine de conditionnement | |
| FR2639366A1 (fr) | Machine a tisser equipee d'un regulateur de tension pour rouleau de devidage ou d'appel d'une nappe textile | |
| FR2844528A1 (fr) | Appareil a poulies reglables pour banc d 'etirage | |
| BE568019A (fr) | ||
| CA2512740A1 (fr) | Procedes de preparation de derives de la dhea | |
| FR2576886A1 (fr) | Dispositif de trancanage de fils, cables ou rubans lors de leur enroulement sur une bobine | |
| CH302598A (fr) | Procédé de mesure continue d'une grandeur variable et dispositif pour sa mise en oeuvre. | |
| FR2561863A1 (fr) | Machine d'irrigation a tambour enrouleur de tuyauterie souple | |
| JPH087058B2 (ja) | 長尺体の計尺装置 | |
| FR2518590A1 (fr) | Dispositif pour la regulation de la tension des fils de chaine sur une machine a tisser | |
| CH450003A (fr) | Appareil automatique pour mesurer et enregistrer le degré de torsion d'un fil | |
| CH296449A (fr) | Treuil pour l'acheminement d'un câble sous tension mécanique. | |
| FR2855190A1 (fr) | Dispositif de reglage et de controle de la stabilite de l'equilibre de tension d'un fil synthetique | |
| BE489204A (fr) | ||
| FR2681617A1 (fr) | Enrouleur-derouleur de materiau plan, notamment textile, a double-sens et a tension controlee. | |
| EP0526332A1 (fr) | Dispositif de découpe d'un pain de savon | |
| FR2640202A1 (fr) | Traceur de courbes a action progressive, a deplacement unidirectionnel du papier | |
| EP0285536A1 (fr) | Dévidoir pour bobines de matériaux en bandes |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Designated state(s): IT |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN WITHDRAWN |
|
| 18W | Application withdrawn |
Withdrawal date: 19851210 |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: COTTENCEAU, REMY Inventor name: ZURCHER, ERWIN Inventor name: FARKAS, RUDOLF |