EP0118344A1 - Actionneurs à commande numérique - Google Patents
Actionneurs à commande numérique Download PDFInfo
- Publication number
- EP0118344A1 EP0118344A1 EP84400271A EP84400271A EP0118344A1 EP 0118344 A1 EP0118344 A1 EP 0118344A1 EP 84400271 A EP84400271 A EP 84400271A EP 84400271 A EP84400271 A EP 84400271A EP 0118344 A1 EP0118344 A1 EP 0118344A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- piston
- valves
- valve
- source
- disc
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images

Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B21/00—Common features of fluid actuator systems; Fluid-pressure actuator systems or details thereof, not covered by any other group of this subclass
- F15B21/08—Servomotor systems incorporating electrically operated control means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B13/00—Details of servomotor systems ; Valves for servomotor systems
- F15B13/02—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors
- F15B13/04—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors for use with a single servomotor
- F15B13/042—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors for use with a single servomotor operated by fluid pressure
- F15B13/043—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors for use with a single servomotor operated by fluid pressure with electrically-controlled pilot valves
Definitions
- the present invention relates to numerically controlled actuators.
- the prior art knows very many hydraulic (or more generally liquid) or pneumatic (or more generally gas) actuators into which a fluid is introduced under pressure into a cylinder and thus displaces the piston over a translation distance depending on the amount of fluid introduced and pressure (not counting in many cases, temperature).
- actuators There are also numerous differential actuators in which the quantities and / or the fluid pressures are varied on one side and / or the other of the piston.
- Other devices with several fluids and / or with multiple cylinders and pistons are also known. These actuators can, depending on their characteristics and the purposes sought, serve as actuators and actuators for actuators.
- German application 31 04 704 (NYSTROM) describes an actuator having a cylinder and piston assembly defining two chambers connected to a source of pressurized fluid by non-return elements and to the atmosphere by valves with fluid control.
- This classic system today is slow and imprecise in responses incompatible with computerization and in particular when applied in digital servomechanisms.
- the present invention therefore relates to actuators, the general principle of which is certainly known, but suitable for digital control by making use in particular of piezoelectric valves, which allows these actuators to be digitally controlled quickly and precisely by digitally actuating l 'organ whose control and adjustment are desired.
- one or the other of the complementary displacements situated on either side of the piston is fed into a cylinder from a source of constant pressure fluid and non-return valves.
- the exhaust is controlled on each side by a solenoid valve, preferably numerically controlled, which causes when one of the solenoid valves comes into action the return to the exhaust pressure of the corresponding cylinder capacity and the admission of gas from the source through the non-return valve.
- a flow limiter inserted in the gas supply allows the speed of return to the supply pressure of the displacement to be adjusted.
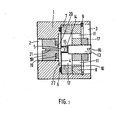
- the cylinder body 31 essentially comprises a cylinder 32 in which slides a piston 33 associated with a rod 34 (simple or as in the figure, symmetrical).
- the two complementary displacements 35 and 36 separated by the piston 33 are supplied with compressed gas at preferably constant pressure from a source not shown by an adjustable flow limiter 37 and two check valves or the like 38 and 39 bringing the fluid respectively to the displacements 35 and 36.
- the non-return devices 38 and 39 therefore allow the displacement of the displacements but do not allow the exhaust.
- This is done using two digital solenoid valves 40 and 41 corresponding respectively to the displacements 35 and 36. These solenoid valves communicate the displacements with a common pipe 42 allowing the escape at 43.
- the rod 34 can control any device and for example a control valve or butterfly.
- the two solenoid valves can be of the type shown in FIG. 2.
- the body 1 is mounted between one of the displacements 35 or 35 and the exhaust 42. This corresponds respectively in FIG. 2 to the indices 2 and 3 (or vice versa).
- valve itself is essentially constituted by the valve itself 4 whose central hole is normally closed by the ball 5.
- the valve is formed by a disc with good mechanical properties and sealed, for example made of thin metal. By way of illustration, for a disc whose diameter is of the order of 10 to 30 mm, the disc will have a thickness of the order of 0.10 to 0.40 mm, the ball having a diameter of the order of 1 to 3 mm.
- the disc 4 separates two cavities, preferably cylindrical coaxial, and of different diameters on the side 2 and on the side 3.
- the disc 4 is mounted on the section plane right separating the two cavities of different volumes. It rests against a seal 6 inserted in a circular groove and is glued against a toroidal piezoelectric cell 7 held in place by a locking plug 8 and a circular clip 9 which is placed in a corresponding groove in the body 1.
- a washer 10 d electrical supply is interposed between the piezoelectric toroid 7 and the blocking plug 8. The latter is drilled at 11 to connect the volume 3 and the space 12 between the plug 8 and the disc 4. All of these parts are substantially coaxial.
- the threaded cylindrical part 13 which carries at its end on the valve side a tubular sleeve 14 in which the ball 5 can move axially.
- the bottom of the sleeve 14 is made of hard material, for example a small circular anvil 15 on which the ball can bounce.
- the threaded piece 13 is provided at 16 with any screwing / unscrewing means for adjusting its sinking and therefore the distance between disc 4 and anvil 15 between which the ball moves.
- a lock nut 17 allows the piece to be locked in position threaded 13.
- All of the component parts of the valve are preferably made of non-magnetic materials, with the exception of the ball 5 and the screw 18, the central part of which extends at 20 to receive the O-ring magnet 19.
- Screw 18 and magnet 19 can be made of cobalt and samarium alloys.
- the screw 18 is drilled at 21 to allow communication between the volume 2 and the space 22 located between the disc 4 and the screw 18.
- the adjustment of the screw 18 allows that of the magnetic attraction forces acting as a return of the ball 5 against its seat in the disc 4.
- This seat can be produced for example by electroerosion or by ultrasound which gives sharp edges then we check the edge with a ball of the same diameter as ball 5 to create the seat.
- the radial vibrations of the toroidal cell 7 are reflected by the bulging of the disc 4 by an axial vibration of the central part of the disc and therefore of the seat of the ball 5 which bounces between this seat entering into vibration and the anvil 15.
- the position adjustment of the anvil 15 using the threaded part 13 allows to search conditions for entry into resonance of the ball at a harmonic of the frequency of the piezoelectric cell (of the order of 50 kHz) to give an evaluation by way of illustration.
- the amplitude of vibration of the ball is very low of the order of a few microns (5 to 10 p for example), the accelerations being of the order of a few hundred times that of gravity (250 to 350 g for example ).
- the opening is controlled by sending a train of pulses modulated at the desired frequency.
- the flow rate increases with the duration of the modulation pulse train and by varying the relative duration of the modulation pulse trains and the dead times separating the modulation pulse trains.
- This can be obtained by any conventional circuit, comprising for example an AND gate, receiving on the one hand the excitation frequency and on the other hand the modification slots, followed by the amplifier necessary to have the supply voltage of the piezoelectric cell.
- the admission of gas into chambers 35 and 36 takes place at constant pressure.
- the maximum flow rate of the intake is defined by the limiter 37 which makes it possible to set this maximum flow rate at a value slightly lower than the maximum flow rate offered by the valves 40 and 41.
- valves 40 and 41 By acting on the valves 40 and 41, it is therefore possible to control precise step-by-step movements of the rod 34 and of the devices which it can drive, which in particular makes it possible to perform digital actuation, as soon as pressure differences and no translation of the piston are substantially proportional.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Electrically Driven Valve-Operating Means (AREA)
- Control Of Fluid Pressure (AREA)
Abstract
La présente invention a pour objet un actionneur comprenant un cylindre, son piston et sa tige, chaque chambre du piston étant reliée d'une part à une source de fluide sous pression, et d'autre part à l'atmosphère. Il est caractérisé par le fait que la source de fluide à pression constante est reliée à chacune des deux chambres par l'intermédiaire d'un dispositif antiretour et que la communication entre chaque chambre et l'atmosphère se fait par une valve. Elle se rapporte à des actionneurs à commande numérique.
Description
- La présente invention a pour objet des actionneurs à commande numérique.
- L'art antérieur connaît de très nombreux actionneurs hydrauliques (ou plus généralement à liquides) ou pneumatiques (ou plus généralement à gaz) dans lesquels un fluide est introduit sous pression dans un cylindre et déplace ainsi le piston sur une distance de translation dépendant de la quantité de fluide introduit et de la pression (sans compter dans de nombreux cas, de la température). Il existe également de très nombreux actionneurs différentiels où l'on fait varier d'un côté et/ou de l'autre du piston les quantités et/ou les pressions de fluide. On connaît aussi d'autres dispositifs à plusieurs fluides et/ou à cylindres et pistons multiples. Ces actionneurs peuvent, selon leurs caractéristiques et les buts recherchés, servir de vérins et de commandes de vérins.
- En particulier, la demande allemande 31 04 704 (NYSTROM) décrit un actionneur présentant un ensemble cylindre et piston définissant deux chambres reliées à une source de fluide sous pression par des éléments anti- retour et à l'atmosphère par des valves à commande fluide. Ce système aujourd'hui classique est d'une lenteur et d'une imprécision dans les réponses incompatibles avec l'informatisation et en particulier lors de l'application dans des servomécanismes numérisés. La présente invention a donc pour objet des actionneurs dont le principe général est certes connu, mais adaptés à la commande numérique en faisant appel notamment aux valves piézoélectriques, ce qui permet à ces actionneurs d'être commandés numériquement avec rapidité et précision en actionnant numériquement l'organe dont on désire assurer la commande et le réglage.
- Pour ce faire, dans un cylindre on alimente l'une ou l'autre des cylindrées complémentaires situées de part et d'autre du piston à partir d'une source de fluide pression constante et de clapets anti-retour. L'échappement est commandé de chaque côté par une électrovalve de préférence à commande numérique ce qui entraîne lorsque l'une des électrovalves entre en action le retour vers la pression d'échappement de la cylindrée correspondante et l'admission de gaz à partir de la source à travers le clapet anti-retour. Un limiteur de débit intercalé sur l'alimentation en gaz permet de régler la vitesse de retour à la pression d'alimentation de la cylindrée.
- Pour mieux faire comprendre les caractéristiques techniques et les avantages de la présente invention, on va en décrire un exemple de réalisation d'ensemble et un exemple de réalisation d'électrovanne, étant bien entendu que ceux-ci ne sont pas limitatifs quant à leur mode de mise en oeuvre et aux applications qu'on peut en faire.
- On se reportera aux figures qui représentent schématiquement:
- - la figure 1 une coupe axiale sur un vérin conforme à la présente invention, et;
- - la figure 2 une électrovalve en coupe axiale utilisable dans lesdits vérins.
- A la figure 1, le corps 31 du vérin comprend essentiellement un cylindre 32 dans lequel coulisse un piston 33 associé à une tige 34 (simple ou comme sur la figure, symétrique). Les deux cylindrées complémentaires 35 et 36 séparées par le piston 33 sont alimentées en gaz comprimé à pression de préférence constante à partir d'une source non représentée par un limiteur de débit réglable 37 et deux clapets anti-retour ou équivalents 38 et 39 amenant le fluide respectivement aux cylindrées 35 et 36. Les dispositifs anti-retour 38 et 39 permettent donc l'alimentation des cylindrées mais ne permettent pas l'échappement. Celui-ci s'effectue à l'aide de deux électrovalves numériques 40 et 41 correspondant respectivement aux cylindrées 35 et 36. Ces électrovalves font communiquer les cylindrées avec une canalisation commune 42 permettant l'échappement en 43. La tige 34 peut commander tout dispositif et par exemple une vanne ou un papillon de commande.
- Les deux électrovalves peuvent être du type représenté à la figure 2. Le corps 1 est monté entre l'une des cylindrées 35 ou 35 et l'échappement 42. Ceci correspond respectivement sur la figure 2 aux indices 2 et 3 (ou réciproquement) la valve elle-même est essentiellement constituée par le clapet lui-même 4 dont le trou central est normalement fermé par la bille 5. Le clapet est formé par un disque à bonnes propriétés mécaniques et étanche, par exemple réalisé en métal de faible épaisseur. A titre illustratif, pour un disque dont le diamètre est de l'ordre de 10 à 30 mm, le disque aura une épaisseur de l'ordre de 0,10 à 0,40 mm, la bille ayant un diamètre de l'ordre de 1 à 3 mm.
- Il est particulièrement avantageux que le disque soit légèrement bombé pour les raisons qui seront ci-après exposées. Le disque 4 sépare deux cavités de préférence cylindriques coaxiales, et de diamètres différents du côté 2 et du côté 3. Le disque 4 est monté sur le plan de section droite séparant les deux cavités de volumes différents. Il repose contre un joint 6 inséré dans une rainure circulaire et est collé contre une cellule piézoélectrique torique 7 maintenue en place par un bouchon de blocage 8 et un clip circulaire 9 qui vient se placer dans une gorge correspondante du corps 1. Une rondelle 10 d'alimentation électrique est intercalée entre le tore piézoélectrique 7 et le bouchon 8 de blocage. Ce dernier est percé en 11 pour mettre en communication le volume 3 et l'espace 12 compris entre le bouchon 8 et le disque 4. Toutes ces pièces sont sensiblement coaxiales. Au centre du bouchon 8 est vissée la pièce cylindrique filetée 13 qui porte en son extrémité côté clapet une douille tubulaire 14 dans laquelle peut se déplacer axialement la bille 5. Le fond de la douille 14 est en matériau dur, par exemple une petite enclume circulaire 15 sur laquelle peut rebondir la bille. La pièce filetée 13 est munie en 16 de tout moyen de vissage/dévissage pour régler son enfoncement et donc la distance entre disque 4 et enclume 15 entre lesquels se déplace la bille 5. Un contre-écrou 17 permet le blocage en position de la pièce filetée 13.
- Dans la cavité de moindre diamètre située du côté 2 par rapport au disque 4 est vissé un ensemble constitué par une vis de réglage 18 et un aimant torique 19.
- L'ensemble des pièces constitutives de la valve est de préférence en matériaux non magnétiques à l'exception de la bille 5 et de la vis 18 dont la partie centrale se prolonge en 20 pour recevoir l'aimant torique 19. Vis 18 et aimant 19 peuvent être en alliage à base de cobalt et samarium.
- Ceci permet une bonne répartition des lignes de force du champ magnétique et une action bien concentrée sur la bille 5. La vis 18 est percée en 21 pour permettre la communication entre le volume 2 et l'espace 22 situé entre le disque 4 et la vis 18. Le réglage de la vis 18 permet celui des forces d'attraction magnétiques agissant en rappel de la bille 5 contre son siège dans le disque 4. Ce siège peut être réalisé par exemple par électroérosion ou par ultrasons ce qui donne des arêtes vives puis on mate l'arête avec une bille de même diamètre que la bille 5 pour créer le siège.
- Lorsque la cellule piézoélectrique 7 est excitée entre la rondelle 10 et la masse du dispositif à l'aide d'un circuit d'alimentation non représenté sur la figure les vibrations radiales de la cellule torique 7 se traduisent du fait du bombement du disque 4 par une vibration axiale de la partie centrale du disque et donc du siège de la bille 5 qui rebondit entre ce siège entrant en vibration et l'enclume 15. Le réglage de position de l'enclume 15 à l'aide de la pièce filetée 13 permet de rechercher des conditions d'entrée en résonance de la bille à un harmonique de la fréquence de la cellule piézoélectrique (de l'ordre de 50 kHz) pour donner une évaluation à titre illustratif. L'amplitude de vibration de la bille est très faible de l'ordre de quelques microns (5 à 10 p par exemple), les accélérations étant de l'ordre de quelques centaines de fois celle de la pesanteur (250 à 350 g par exemple).
- On conçoit donc que l'on dispose de nombreuses variables pour faire varier l'ouverture de l'électrovalve. L'ouverture est commandée par envoi d'un train d'impulsions modulé à la fréquence voulue. Le débit augmente avec la durée du train d'impulsions de modulation et en jouant sur la durée relative des trains d'impulsions de modulation et des temps morts séparant les trains d'impulsions de modulation. Ceci peut être obtenu par tout circuit classique, comprenant par exemple une porte ET, recevant d'une part la fréquence d'excitation et d'autre part les créneaux de modification, suivie de l'amplificateur nécessaire pour disposer de la tension d'alimentation de la cellule piézoélectrique.
- L'intérêt de l'action quasi immédiate de la validation et du fonctionnement de l'électrovalve réside dans la grande rapidité et la grande précision du fonctionnement.
- En revenant à la figure 1, on peut en ouvrant l'électrovalve 40 ou 41 admettre respectivement du gaz en 35 ou en 36 via 37 et respectivement 38 ou 39.
- L'admission de gaz dans les chambres 35 et 36 se fait à pression constante. Le débit maximal de l'admission est défini par le limiteur 37 ce qui permet de fixer ce débit maximal à une valeur légèrement inférieure au débit maximal offert par les valves 40 et 41.
- Ces dernières étant fermées, les forces étant équilibrées de part et d'autre du piston 33, celui-ci reste fixe.
- - Si l'on suppose d'abord qu'aucune force extérieure n'agit sur le piston 33 par sa tige 34 et si l'une des valves 40 ou 41 est actionné, il en résulte une fuite de gaz de la cylindrée correspondante et une différence de pression apparait, d'où déplacement du piston 33. Si par exemple c'est la valve 40 qui est ouverte, la pression baisse dans la chambre 35 et le déséquilibre entre 35 et 36 entraîne un déplacement du piston 33 vers 40 sensiblement proportionnel à la différence de pression. Le mouvement se produit jusqu'à équilibre des forces, mais les clapets 38 et 39 entrent de leur côté en jeu et tendent à ramener les pressions en 35 et 36 à la pression constante de la source.
- Dès que s'arrête l'actionnement de la valve 40, la pression en 35 et 36 est ramenée à la normale et le piston est arrêté dans son mouvement. A l'inverse si c'est la valve 41 qui est actionné, le piston se déplace vers elle.
- - Si l'on suppose maintenant qu'une force F agit sur la tige 34 du piston 33, dirigée axialement dans le sens de 35 vers 36, pour que le piston 33 reste immobile, il faudrait actionner la valve 40 qui, entrai- nant une baisse de pression dans la chambre 35 provoquerait une différence de pression de part et d'autre du piston 33. Dans ce cas, une force opposée à F sollicite le piston 33 en sens inverse et dès que les forces sont équilibrées, le piston s'arrête. Si cette force opposée à F est inférieure, le piston se déplace dans le sens de F. Si elle lui est supérieure le piston se déplace en sens inverse.
- Ces dispositifs permettent donc de déplacer la tige 34 et de commander tout dispositif tel qu'une vanne et ceci de façon très précise. Ceci est possible même lorsqu'apparaissent des forces de réaction qu'il est possible de vaincre tout en gardant la maîtrise du positionnement précis du piston et de sa tige.
- En agissant sur les valves 40 et 41, on peut donc commander des déplacements pas à pas précis de la tige 34 et des dispositifs qu'elle peut entraîner ce qui permet notamment de réaliser un actionnement numérique, dès lors que différences de pression et pas de translation du piston sont sensiblement proportionnels.
Claims (3)
1.- Actionneur comprenant un cylindre, son piston et sa tige, chaque chambre du piston étant reliée d'une part à une source de fluide sous pression et d'autre part à l'atmosphère, la source de fluide à pression constante étant reliée à chacune des deux chambres par l'intermédiaire d'un dispositif antiretour caractérisé par le fait que la communication entre chaque chambre et l'atmosphère se fait par une valve à commande numérique.
2.- Actionneur selon la revendication 1, caractérisé par le fait que les valves sont des valves à commande piézoélectrique.
3.- Actionneur selon l'une des revendications 1 ou 2, caractérisé parle fait qu'il est appliqué à la commande numérique de vannes.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR8302303A FR2540945A1 (fr) | 1983-02-14 | 1983-02-14 | Actionneurs a commande numerique |
| FR8302303 | 1983-02-14 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP0118344A1 true EP0118344A1 (fr) | 1984-09-12 |
Family
ID=9285879
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP84400271A Withdrawn EP0118344A1 (fr) | 1983-02-14 | 1984-02-09 | Actionneurs à commande numérique |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP0118344A1 (fr) |
| FR (1) | FR2540945A1 (fr) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0366605A1 (fr) * | 1988-10-25 | 1990-05-02 | GebràDer Sulzer Aktiengesellschaft | Dispositif de commande électrohydraulique ou -pneumatique |
| FR2641829A1 (fr) * | 1989-01-19 | 1990-07-20 | Danfoss As | Servomecanisme commande par un fluide |
| DE19506469C1 (de) * | 1995-02-24 | 1996-04-18 | Honeywell Ag | Doppeltwirkender elektropneumatischer Stellungsregler |
| GB2541485A (en) * | 2016-04-14 | 2017-02-22 | Libertine Fpe Ltd | Actuator module |
| US10662801B2 (en) | 2015-08-21 | 2020-05-26 | Rolls-Royce Plc | Actuator control |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3465732A (en) * | 1967-10-19 | 1969-09-09 | Physics Int Co | Piezoelectric control valve |
| US3537355A (en) * | 1966-12-14 | 1970-11-03 | George N Bliss | Fluid-operated servomechanism |
| DE2446963A1 (de) * | 1974-10-02 | 1976-04-15 | Bosch Gmbh Robert | Stelleinrichtung |
| FR2498285A1 (fr) * | 1981-01-19 | 1982-07-23 | Missioux Jean Leon | Distributeur hydraulique ultra-rapide |
| DE3104704A1 (de) * | 1981-02-10 | 1982-08-26 | Per Henrik Gösta 59030 Borensberg Nyström | "servovorrichtung" |
-
1983
- 1983-02-14 FR FR8302303A patent/FR2540945A1/fr not_active Withdrawn
-
1984
- 1984-02-09 EP EP84400271A patent/EP0118344A1/fr not_active Withdrawn
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3537355A (en) * | 1966-12-14 | 1970-11-03 | George N Bliss | Fluid-operated servomechanism |
| US3465732A (en) * | 1967-10-19 | 1969-09-09 | Physics Int Co | Piezoelectric control valve |
| DE2446963A1 (de) * | 1974-10-02 | 1976-04-15 | Bosch Gmbh Robert | Stelleinrichtung |
| FR2498285A1 (fr) * | 1981-01-19 | 1982-07-23 | Missioux Jean Leon | Distributeur hydraulique ultra-rapide |
| DE3104704A1 (de) * | 1981-02-10 | 1982-08-26 | Per Henrik Gösta 59030 Borensberg Nyström | "servovorrichtung" |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0366605A1 (fr) * | 1988-10-25 | 1990-05-02 | GebràDer Sulzer Aktiengesellschaft | Dispositif de commande électrohydraulique ou -pneumatique |
| CH675752A5 (fr) * | 1988-10-25 | 1990-10-31 | Sulzer Ag | |
| US5148735A (en) * | 1988-10-25 | 1992-09-22 | Danfoss A/S | Electrohydraulic actuator |
| FR2641829A1 (fr) * | 1989-01-19 | 1990-07-20 | Danfoss As | Servomecanisme commande par un fluide |
| DE19506469C1 (de) * | 1995-02-24 | 1996-04-18 | Honeywell Ag | Doppeltwirkender elektropneumatischer Stellungsregler |
| US10662801B2 (en) | 2015-08-21 | 2020-05-26 | Rolls-Royce Plc | Actuator control |
| GB2541485A (en) * | 2016-04-14 | 2017-02-22 | Libertine Fpe Ltd | Actuator module |
| GB2541485B (en) * | 2016-04-14 | 2017-08-23 | Libertine Fpe Ltd | Actuator module |
| US11041512B2 (en) | 2016-04-14 | 2021-06-22 | Libertine Fpe Limited | Actuator module |
Also Published As
| Publication number | Publication date |
|---|---|
| FR2540945A1 (fr) | 1984-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| FR2591695A1 (fr) | Amortisseur de vibrations a deux tubes | |
| FR2665497A1 (fr) | Amortisseur de vibrations. | |
| FR2760255A1 (fr) | Dispositif de transmission d'un mouvement, injecteur comportant un tel dispositif et procede d'ajustement d'un tel injecteur | |
| FR2588343A1 (fr) | Systeme d'amortissement d'oscillations avec au moins un amortisseur hydraulique reglable pour vehicules | |
| EP1047892A1 (fr) | Vanne de reglage de debit | |
| FR2842269A1 (fr) | Amortisseur dynamique de type actif | |
| FR2597186A1 (fr) | Soupape ou vanne fonctionnant sans frottement | |
| FR2649465A1 (fr) | Ensemble pour le passage de fluide | |
| FR2973092A1 (fr) | Dispositif d'obturation, regulateur de pression comportant un tel dispositif, dispositif d'injection diesel comportant un tel regulateur, moteur diesel et vehicule comportant un tel moteur | |
| FR2586222A1 (fr) | Servo de frein pneumatique | |
| FR2711201A1 (fr) | Amortisseur à effet d'amortissement variable en fonction de la charge. | |
| EP0118344A1 (fr) | Actionneurs à commande numérique | |
| FR2558913A1 (fr) | Organe de suspension de moteur | |
| FR2689951A1 (fr) | Dispositif de liaison mécanique rigide à coupure de fréquence. | |
| FR2509466A1 (fr) | Capteur de deplacement inductif pour organe de reglage fluidique | |
| EP0117195A1 (fr) | Electrovalves à commande piézoélectrique | |
| FR2914716A1 (fr) | Butee de compression hydraulique, notamment pour amortisseur hydraulique de suspension de vehicule automobile | |
| EP0378947B1 (fr) | Soupape de purge | |
| FR2821140A1 (fr) | Valve pneumatique pilotee | |
| FR2595433A1 (fr) | Dispositif de commande de deceleration | |
| FR2938909A1 (fr) | Dispositif de capteur comportant un element de deformation magnetoelastique | |
| FR2809155A1 (fr) | Vanne commandable notamment pour delivrer un debit pulse de fluide | |
| FR2869957A1 (fr) | Pompe a piston comportant un element de fermeture a commande active | |
| FR2732814A1 (fr) | Dispositif de commande a electroaimant a noyau sans frottement, et application aux vannes a commande continue | |
| EP1342913B1 (fr) | Injecteur de carburant |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Designated state(s): AT BE CH DE GB IT LI LU NL SE |
|
| 17P | Request for examination filed |
Effective date: 19850308 |
|
| 17Q | First examination report despatched |
Effective date: 19860127 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN WITHDRAWN |
|
| 18W | Application withdrawn |
Withdrawal date: 19860416 |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: GUILLEMOT, PHILIPPE |