EP0114542A1 - Appareil contacteur à actionnement électro-magnétique contrôlé et à ouverture automatique lors de l'apparition de surcharges - Google Patents
Appareil contacteur à actionnement électro-magnétique contrôlé et à ouverture automatique lors de l'apparition de surcharges Download PDFInfo
- Publication number
- EP0114542A1 EP0114542A1 EP19830402353 EP83402353A EP0114542A1 EP 0114542 A1 EP0114542 A1 EP 0114542A1 EP 19830402353 EP19830402353 EP 19830402353 EP 83402353 A EP83402353 A EP 83402353A EP 0114542 A1 EP0114542 A1 EP 0114542A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- transmission member
- locking lever
- lever
- contactor device
- switch
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000009471 action Effects 0.000 title claims abstract description 52
- 230000005540 biological transmission Effects 0.000 claims abstract description 48
- 230000007246 mechanism Effects 0.000 claims abstract description 26
- 238000013475 authorization Methods 0.000 claims description 7
- 230000011664 signaling Effects 0.000 claims description 5
- 230000005284 excitation Effects 0.000 claims description 4
- 238000009527 percussion Methods 0.000 claims description 4
- 230000000694 effects Effects 0.000 description 6
- 230000001960 triggered effect Effects 0.000 description 6
- 238000006073 displacement reaction Methods 0.000 description 5
- 230000002747 voluntary effect Effects 0.000 description 4
- 230000002159 abnormal effect Effects 0.000 description 2
- 210000003323 beak Anatomy 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 210000004027 cell Anatomy 0.000 description 1
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 210000003127 knee Anatomy 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000002035 prolonged effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images









Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H71/00—Details of the protective switches or relays covered by groups H01H73/00 - H01H83/00
- H01H71/10—Operating or release mechanisms
- H01H71/50—Manual reset mechanisms which may be also used for manual release
- H01H71/56—Manual reset mechanisms which may be also used for manual release actuated by rotatable knob or wheel
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H71/00—Details of the protective switches or relays covered by groups H01H73/00 - H01H83/00
- H01H71/02—Housings; Casings; Bases; Mountings
- H01H71/0264—Mountings or coverplates for complete assembled circuit breakers, e.g. snap mounting in panel
- H01H71/0271—Mounting several complete assembled circuit breakers together
- H01H2071/0278—Mounting several complete assembled circuit breakers together with at least one of juxtaposed casings dedicated to an auxiliary device, e.g. for undervoltage or shunt trip
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H71/00—Details of the protective switches or relays covered by groups H01H73/00 - H01H83/00
- H01H71/04—Means for indicating condition of the switching device
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H71/00—Details of the protective switches or relays covered by groups H01H73/00 - H01H83/00
- H01H71/10—Operating or release mechanisms
- H01H71/12—Automatic release mechanisms with or without manual release
- H01H71/46—Automatic release mechanisms with or without manual release having means for operating auxiliary contacts additional to the main contacts
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H89/00—Combinations of two or more different basic types of electric switches, relays, selectors and emergency protective devices, not covered by any single one of the other main groups of this subclass
- H01H89/06—Combination of a manual reset circuit with a contactor, i.e. the same circuit controlled by both a protective and a remote control device
- H01H89/08—Combination of a manual reset circuit with a contactor, i.e. the same circuit controlled by both a protective and a remote control device with both devices using the same contact pair
Definitions
- the invention therefore proposes to provide an apparatus in which rotating parts will be used wherever relatively large transmissions of force occur which may consequently cause abnormal wear, while reducing the size of an apparatus where displacements or races of certain parts take on relatively large values; these important races will be necessary on the one hand because of the fact that certain actions are communicated by user, and that their completion will have to be clearly perceptible by this one, and on the other hand because of the concern to make clearly visible each of the states that the device can take; moreover, the energies necessary for very rapid movement of the parts concerned at the moment of tripping being lower the smaller their traps are, the significant reduction in dimensions will result here in an improvement in the response time of the 'apparatus.
- the transimission member has between two parallel plates a series of superimposed cam surfaces which are able to cooperate with the locking lever and with a common part taking the form of 'a pivoting lever capable of cooperating with a pivoting lock, this member, this locking lever and this common part having pivot axes parallel to each other and perpendicular to the plates between which they are placed.
- switches with manual control and automatic opening in which the axes of the movable rotary parts, comprising in particular locking and resetting triggering members, are placed parallel to each other and are pivoted between two plates; the aim sought here is generally to obtain reduced transverse dimensions with a view to achieving a grouping side by side of numerous devices of small thickness which is made possible thanks to a short separation distance of the plates, which on the other hand results in an increase in the surface thereof; moreover, in these known devices, the position of the manual control member, corresponding to the triggering state, is not clearly separated from the open and closed positions so that erroneous information can be perceived by the users.
- the invention also aims to obtain a remote-controlled operation which is in its results as close as possible to that which is performed by an operator, while using a sequence different operations so as to reduce the travel of the parts directly associated with a small electric motor intended for these maneuvers; the achievement of the result was notably achieved by discarding the traditional solution of a reset motor which is directly associated with the manual control button.
- FIG. 1 The block diagram of a switch device in an insulating box 20 having power contacts, the closing and opening of which can be controlled remotely, as is the case with contactors, and furthermore presenting means automatic opening which act when appear on the power circuit which supplies a load with overloads of different kinds, is illustrated in Figure 1.
- An electromagnet 1 having a coil 3 placed in series with a safety switch 4 in the control circuit 7 and between the control terminals 5 and 6, attracts a frame 29 against the action of a return spring 36.
- the power circuit 8 of the device placed between the power terminals 9 and 10, comprises the switch 2, a coil 11 with which is associated a magnetic striker 28, a magnetic coil 13 with which is associated a pallet 34 and a bimetal strip 14. It should be understood that several power circuits, for example three, can be arranged in the apparatus for supplying polyphase loads.
- the striker 28 lifts the movable contact 2a by an instantaneous action "a” and the latter remains hung in the open position behind a latch 28a. A displacement undergone by the bolt on this occasion transmits an action "q" to a first device with abrupt release 17.
- the bimetallic strip 14 deforms and communicates an action "c" to the second mechanism 19.
- the first device 17 is therefore released or triggered when one of three abnormal overloads appears in the circuit (10, 9, 8, 8a).
- the device 17 When the device 17 is triggered, it in turn produces an action "p" which is applied to a third device with abrupt release 31. The latter then transmits an abrupt action “e” to open the switch 4, and the electro -magnet 1 is de-energized.
- the first and third devices 17 respectively 31 cooperate by actions “m” and “m” respectively j and j with a rotary transmission member 32, which is integral with a local manual control button 18 which can move in front of a ladder 33 comprising in this order four positions "F", “D”, "0” and "R".
- the member 32 is associated with a return spring 35 which tends to move it in a direction K.
- switch 2 will be closed when a suitable voltage is applied between terminals 5 and 6 to supply the load.
- the action “m” then causes the action “e” which opens the switch 4 and releases the member 32, while the action “j” places in the path followed by this member a stop capable of stopping the latter in an automatic opening position of switch 2 following the appearance of a fault.
- the user having to search for the causes of the appearance of this fault, must then place the button 18 in the stable voluntary open position "O" defined above.
- the device is put back into service by a manual action of the operator exerted on the button 18 to bring it first into the position "R" reset unstable.
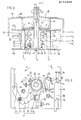
- the mechanism 100 which performs the functions illustrated in Figure 1 by the reference numerals 4, 17, 18, 31, 32, 33, 35 is shown in Figure 2 in a section passing through the axis X-X 'of the rotary control knob 18.
- This button is fitted onto a prismatic shaft 40, for example having a square section, one edge of which has been chamfered in order to avoid possible orientation errors.
- This shaft which passes through the rotary part 32 to drive it, is pivoted on the one hand at a lower end 40 'in a bore 42 of a lower plate 44, and on the other hand in an upper region thanks to a cylindrical bearing 32 'of this member 32 which is pivoted in a bore 41 of an upper plate 43 parallel to the previous one.
- the transmission member 32 has in three planes Pl, P 2, P 3, parallel between them and perpendicular to the axis XX ', cam surfaces 45, 46, 47, the function of which will be specified later.
- a metal part 52 secured to this member 32 carries a finger 51 which cooperates with one end 50 of a helical spring working in torsion, and of which another end 49 cooperates with a support 57 of the plate 44, see also FIG. 3; this spring communicates to the member 32 a couple of counterclockwise direction K.
- This locking lever 55 has two arms 55a, 55b opposite, one of which 55a carries a support 61 and is associated with a return spring 58 which communicates to it a torque of direction K; the other arm 55b carries on the one hand, around a articulation 60 a pawl 59 which is subjected to a direction torque K provided by a compression spring 69 placed between an arm 68 of this pawl and the lever 55, and on the other hand has a percussion surface 76.
- Another arm 66 of the pawl has a hook represented for example by a cylindrical stud 67 parallel to XX ′ and placed in the plane P 2 .
- a insulating contact lever 62 having an end 63 which can separate a movable contact 64 from a fixed contact 65, these two contacts belonging to the safety switch 4.
- a helical spring 73 whose turns are placed around the rod 53 has an end 73 which is linked at a point 74 of the contact lever, and a free end 75; this spring, which is placed in elastic torsional stress between point 74 and a stop 130 of the contact lever, is therefore free to orient itself around the rod 53, with the contact lever 63 while being limited in displacement by the support 61 that the lever 55 can cause to cooperate with the contact lever.
- the cam 46 of the transmission member 32 has in the plane P2 opposite the hook 67 a substantially radial holding surface 70, an internal cylindrical bearing surface 93 and an external cylindrical bearing surface 71.
- a boss 72 of the locking lever bears on the surface 71 under the effect of the spring 58 and the retaining surface 70 is retained by the hook 67, because the spring 35 associated with the member 32 exerts on this hook a force, see the corresponding arrow, which is not sufficient to cause either the latch 59 or the lever 55 to topple; the contact lever 62 thus allows the switch to be closed.
- the trigger lever 56 which is subjected to a counterclockwise torque L by the tension spring 79 is supported in inactive position I, thanks to a tooth 80 placed at its periphery, against a spout 81 belonging to a lock 82 which can tilt around an axis parallel to ZZ '.
- This trigger lever also has a hammer 91 placed in the plane P 2 opposite the percussion surface 76, an abutment surface 92 placed opposite the surface 93 and a first cooperating surface 94.
- the lock 82 receives a clockwise torque L from a compression spring 84, and has two arms 85 and 86 which can receive pushes q and r transmitted respectively by a folded portion 89 of a first drawer 87 (partially shown in dotted lines due to its location under the plate 44) and respectively by one end 90 of a second drawer 88, these two drawers moving parallel to the planes Pl, P2, P3.
- a push q or a push r exerted on the lock 82 produces a counterclockwise rotation of the latter which releases the beak 81 from the tooth 80 and allows the trigger lever 56 to pivot counterclockwise under the action of the spring 79.
- This movement causes the hammer 91 to strike the percussion surface 76 and produces a clockwise rotation K of the locking lever 55, the support 61 of which causes the contact lever 62 to move in the same direction in order to open the switch 4, while the hook 67 disengages from the holding surface 70 to release the transmission member 32.
- the trigger lever 56 stops in a working position T for which the abutment surface 92 meets the surface d support 93, see figure 8.
- This triggered state of the mechanism which can only be obtained if actions q or r consecutive to overloads of different natures have appeared, is also signaled externally by a display device 21 if the action q has been decisive thanks to the displacement a witness 23 carried by a part 25 which is movable around the axis XX 'and which is associated with a tab 97a of the drawer 87 and with a return spring 24.
- This signaling device 21 places in this case the witness 23 opposite an opening 22 of the housing 20 of the apparatus, see FIG. 3, and therefore signals the appearance of a frank short circuit.
- the tooth 80 appears opposite the beak 81 and, if the actions q or r are no longer present, this engages behind the tooth 80 so as to maintain the release lever in position I. Due to the torque imparted by the spring 35, the holding surface 70 continues to bear against the stop surface 94 and provides the parts 18 and 32 with a stable position d 'opening 0.
- Such a reset action which is carried out by an additional manual rotation of the control button 18 in direction K, going from position 0 to position R of button 18 (see FIG. 6), begins when, in this position 0, a reset surface 77 belonging to the cam 47 of the transmission member 32 and lying opposite an extension 78 of the trigger lever 56 meets the latter to push it clockwise L until the moment where the trigger lever 56 reaches a position A visible in FIG. 10. So that the continuity of the movement going from D towards R passing through 0 is ensured, the surfaces 70 and 77 and the surfaces 94 and 78 are offset by angular values alpha and beta respectively, see figure 5b, which produce a meshing effect.
- the trigger lever 56 also plays the role of a reset lever thanks to two lugs 95 and 96 which push portions 97b and 98 belonging to the two drawers 87 and 88 respectively, see Figures 10 and 11 We find in FIG. 1 under the designation q and r the corresponding reset actions which are applied to the detector devices 28a and 19.
- the lever 56 is therefore a common trigger and reset piece.
- position D is stable and results from the equality and opposition of the torques provided by the springs 79 and 35 on the surfaces 94 and 70 of the parts 56 and 32 respectively.
- a remote reset device 101 which is for example housed in an annex box 160 and which will have to carry out, in the event of automatic triggering, a reset operation of the snap devices 17, 31 and 19; on the one hand, this operation should only be possible if, after an automatic triggering, the snap device 17 is itself in the condition of being reset; this possible rearming state is acquired if the snap device 19 does not permanently deliver an action "r" caused by a bimetallic strip 14 still hot. On the other hand, this operation must not be able to be engaged if the mechanism has not been triggered automatically and is in position F, because in the latter case this operation is useless.
- This operation must be prohibited or at least a corresponding information must be provided in order to avoid it, if the mechanism is in a voluntary open position 0, which has been given to it by a manual action exerted by an operator placed near the device; such a voluntary opening may indeed have been decided by this operator to carry out the inspection of a machine powered by the device and this without the knowledge of another person placed at a distance, so that a rearmament remotely controlled by this person could have serious consequences, either due to the restoration of the voltage on the supply line, or due to the start of a process in which all the devices are not in working order.
- the remote reset device mainly comprises (see FIGS. 12 and 13), a small electric motor 102, a speed reducer 103, a helical or spiral cocking cam 104, an cocking button 105, biased against the cam by a spring 105a, and an internal electrical circuit 106 comprising in the housing 160 three own terminals 107, 108, 109, two switches 112, 113 and of course the motor 102.
- the complete control circuit further comprises an external remote control switch 111 and two terminals for connection to the network 114, 115.
- the self-power switch 112 is placed in parallel on it between a terminal 116 of the motor and a first network terminal 114, the current return being effected between a second motor terminal 117 and the network terminal 115.
- This switch 112 replaces switch 111 as soon as the arming push-button 105 has started to move and remains closed until the cam 104 having, for example, made a full revolution returns to its starting position for which the switch 112 is open, which stops the engine.
- the authorization switch 113 which will only be closed for this tripping position is placed between the terminal 116 of the motor. and the switch 111.
- This authorization switch is actuated by a pusher 136 which cooperates, as will be seen below, with a particular part of the mechanism 100.
- a drive piece taking the form of a slide 118 has therefore been associated with the mechanism 100 which itself comprises members or has special measures intended to establish with this slide the necessary cooperation.
- the drive part 118 is formed by a slide movable along an axis QQ 'which is parallel to the plates 43 , 44 and therefore perpendicular to the axes XX ', YY', ZZ '.
- This slide which could if necessary be replaced by a pivoting part having a neighboring movement, has an elongated opening l19 which is crossed with a small clearance by the pivot 54 of the part 56 and an end 120, by which the guidance is carried out in translation.
- This slide has, in addition, first, second and third support points 121, respectively 122, respectively 123 and a second end 124 which is opposite to these support points.
- This slide is held against a stop 125 of the housing by a return spring 126 which places the end 124 opposite an opening 127 of the housing 20 so as to be able to cooperate with the end 134 of the arming push-button 105.
- the transmission part 32 has, in an upper region 128, through which passes the plane P1 near the plate 43 and containing the slide 118, a thrust surface 131 belonging to a cam 45 whose angular position is offset by an angle phi relative to the surface 70 see Figures 2 and 14; this surface 131 is placed opposite the fulcrum 121 and is separated from it by a certain distance d 1 when the transmission part is in position D and that the slide 118 is against the stop 125 in a rest position S o shown in dotted lines in Figure 15a.
- the second fulcrum 122 which here belongs to an inclined ramp 122a, is placed opposite a second thrust surface 132 represented by the end 75 of the spring 73; a distance d 2 separates this fulcrum 122 and this surface 132 when, the part 32 being in position D the locking lever 55 is in position B, and that the contact lever 62 is in position G.
- the third support point 123 is placed opposite a third support surface 133 which is carried by the stud 95 of the common triggering and arming lever 56, in a region thereof, opposite the tab. 97, see also FIGS. 10 and 11, and is separated from this surface by a distance d 4 when the triggering and arming lever 56 is in its working position T and the slider 118 is in position S, see figure 15a.
- the support points 121, 122, 123 will meet the thrust surfaces placed opposite 131 respectively 132, respectively 133 to operate d on the one hand, the preparatory phases for resetting the abruptly tripping devices 17 (common part 56) and 31 (holding lever 55), and on the other hand ensuring that the switch 4 is kept in the open state.
- the slide l18 passes for example first to the point such as S 1 where the stops 95, 96 of the common part 56 meet the drawers 97b, 87 and 98, 88 to push them back and rearm the devices 19 and 28a, then to point S 3 when the tooth 80 of the part 56 is opposite the spout 81, subsequently at point S 4 when the hook 67 after having slid against the surface 71 is opposite the surface 70, and finally at point 5 5 where the part 56 is in position A.
- the position of the slide 118 at point S 4 therefore allows the locking lever 55 to take the position C illustrated in FIG. 4, since in the meantime the hammer 91 being in a position close to A no longer rests on the range 76. This should not, however, cause the closure re of the switch 4, because such a closure would allow the electromagnet 1 to instantly close the contacts 2, which have been opened due to the appearance of an overload, without it being certain that a replenishment of line 8 is justified.
- this closure is made impossible by the cooperation of the surfaces and support points 132 and 122.
- This cooperation which begins sufficiently early for example at point 5 2 of the path of the slide 118 has a property of limiting the stroke of the contact lever 62 which is obtained thanks to the elasticity of the spring 73 and thanks to the presence on the housing 20 of a stop such as 12a or 12b, see FIG. 15e.
- This elasticity and these stops are capable of preventing excessive deformation of the movable contact 64 and of stopping the lever 63 in the H position, independently of the total travel of the slide 118.
- the return path of the slide 118 then passes through a point S 8 located substantially at the same location as S 3 for which the tooth 80 is present opposite the spout 81; the latter is then capable of retaining the common part 56, since the attachment of the drawers 87 and 88 being carried out, these no longer act on the latch 82.
- the slide 118 is at this time there at point S 9 for which the switch 4 which was still open, sees its opening confirmed by the tilting of the lever 55, while the member 32 returns to its corresponding trigger position D.
- the rearming attempt has therefore failed in this case, which responds well to the set goal, and the slide is found at the return point S 11 , after having passed through a point S 10 where the contact lever 62 is no longer solicited by the slide, the switch 4 closes.
- the switch 4 was constantly left open to prevent a new excitation of the electromagnet 1 (see Figure 17).
- a finger such as 96 carried by the common part 56 raises for the corresponding position T thereof a small slide 151 of which a ramp 151a actuates directly or indirectly an authorization switch such as 113, see FIGS. 7 and 13.
- the transmission of movement between the boxes 20 and 160 is made for example using pushers placed in the box 140 such as the pushbutton 145 for communication of the motorized reset movement, and the push-buttons 152 and 143 for the operation of the authorization switch 113.
- the push-button 152 which is for example pressing on a ramp of a small slide 151 actuated by the common part 56
- the switch 146 of the housing 140 can be actuated by one end 150 of the drawer 87 to signal the appearance of a short circuit, while the switch 144 can be actuated by the slider 88 to signal the appearance of a fault due to an impeding short-circuit or to a lower but prolonged overload.
- a switch placed in the housing 140 but not shown so as not to overload the drawing, is also arranged in the housing 140 in cooperation with a pusher or small drawer placed in the housing 100 so as to be actuated when the local control button 18 is in its manual opening position 0 .
- a residual volume 154 of this housing can be used to receive auxiliary switches 141 capable of being controlled. by a part secured to the movable frame 29 of the electromagnet 1 of the contactor C o .
- the housing 140 of the signaling module S i is finally equipped with terminals such as 147 for making the connections of the internal switches to the external devices, while fixing means such as 155, 156 are used to hold the housings 20, 140 and 160 against each other.
Landscapes
- Push-Button Switches (AREA)
- Breakers (AREA)
- Mechanisms For Operating Contacts (AREA)
- Driving Mechanisms And Operating Circuits Of Arc-Extinguishing High-Tension Switches (AREA)
Abstract
Description
- L'invention se rapporte à un appareil contacteur comportant dans un boîtier :
- a) pour l'actionnement de ses contacts de puissance, un électro-aimant dont le circuit d'excitation possède un interrupteur de sécurité pouvant être ouvert ou fermé par un levier de verrouillage associé à une pièce de transmission solidaire d'un bouton de commande locale ayant une première position stable d'ouverture et une deuxième position stable de fermeture, cette dernière étant assurée par ce levier de verrouillage contre l'action d'un premier ressort de rappel de la pièce de transmission.
- b) et pour l'ouverture automatique de ces contacts de puissance un mécanisme à déclenchement brusque réarmable qui comporte :
- 1) un verrou sensible au mouvement d'au moins un de plusieurs tiroirs réarmables réagissant brusquement lors de l'apparition de surcharges de différentes natures dans le circuit de puissance.
- 2) une pièce de déclenchement et de réarmement commune associée à un second ressort de rappel et maintenue en U 1 1, 4, 542 position d'armement par ce verrou ou libérée par celui-ci de façon à percuter d'une part le levier de verrouillage, et à coopérer avec l'organe de transmission pour donner à celui-ci une troisième position stable de déclenchement placée entre les première et deuxième positions, et à recevoir d'autre part de cet organe de transmission une action de réarmement manuel qui rétablit l'armement de la pièce commune et celui des tiroirs lorsque le bouton de commande est placé dans une quatrième position instable, de réarmement, opposée à la deuxième position.
- Un exemple de réalisation schématique de cet appareil est déjà décrit dans la demande de brevet français N° 8120919 déposée le 9 Novembre 1981 par la demanderesse. On peut observer que dans cet exemple de réalisation si certaines des pièces mobiles qui sont représentées peuvent effectuer des mouvements rotatifs, leurs axes propres sont perpendiculaires, tandis que les mouvements d'autres pièces coopérantes sont par ailleurs linéaires ; la mise en oeuvre directe d'une telle disposition obligerait par suite le constructeur à prévoir non seulement des guidages dans des plans différents et de faibles écarts de fabrication afin que les coopérations établies conservent leur qualité mais obligerait encore celui-ci à tenir compte d'un encombrement important en raison de la présence de pièces coulissantes.
- L'invention se propose par suite de fournir un appareil dans lequel des pièces rotatives seront utilisées partout où se présenteront des transmissions de forces relativement importantes risquant par suite de provoquer des usures anormales, tout en réduisant l'encombrement d'un appareil où les déplacements ou courses de certaines pièces prennent des valeurs relativement importantes ; ces courses importantes seront nécessaires d'une part en raison du fait que certaines actions sont communiquées par utilisateur, et que leur accomplissement devra être nettement perceptible par celui-ci, et d'autre part en raison du souci de rendre clairement visibles chacun des états que peut prendre L'appareil ; par ailleurs les énergies nécessaires à la mise an mouvement très rapide des pièces concernées au moment 3'un déclenchement étant d'autant plus faibles que leurs nasses seront réduites, la réduction importante des dimensions se traduira ici par une amélioration du temps de réponse de l'appareil.
- Selon l'invention, le but visé est atteint grâce au fait que l'organe de transimission présente entre deux platines parallèles une série de surfaces de cames superposées qui sont aptes à coopérer avec le levier de verrouillage et avec une pièce commune prenant la forme d'un levier pivotant apte à coopérer avec un verrou pivotant, cet organe, ce levier de verrouillage et cette pièce commune ayant des axes de pivotement parallèles entr'eux et perpendiculaires aux platines entre lesquelles ils sont placés.
- On connait déjà des interrupteurs à commande manuelle et à ouverture automatique dans lesquels les axes des pièces rotatives mobiles, comprenant notamment des organes de déclenchement de verrouillage et de réarmement, sont placés parallèlement entr'eux et sont pivotés entre deux platines ; le but recherché ici est généralement l'obtention de dimensions transversales réduites en vue de réaliser un groupement côte à côte de nombreux appareils de faible épaisseur ce qui est rendu possible grâce à une faible distance de séparation des platines, qui entraîne par contre une augmentation de la surface de celles-ci ; par ailleurs, dans ces appareils connus, la position de l'organe de commande manuelle, correspondant à l'état de déclenchement, n'est pas nettement séparée des positions d'ouverture et de fermeture de sorte que des informations erronées peuvent être perçues par les utilisateurs. La faible distance qui sépare, en outre, la position de déclenchement de la position de fermeture, et dont le parcours est nécessaire pour effectuer un réarmement, oblige à utiliser des dispositifs d'amplification de mouvement et des genouillères qui nécessitent, d'une part le respect très strict des dimensions de fabrication, et d'autre part l'exercice de forces importantes ayant pour conséquence une usure relativement rapide provoquant la modification des dimensions d'origines.
- Dans un mode de réalisation permettant des manoeuvres de réarmement à distance, l'invention vise par ailleurs l'obtention d'un fonctionnement télécommandé qui soit dans ses résultats aussi proche que possible de celui qui est effectué par un opérateur, tout en utilisant une séquence d'opérations différente de façon à réduire la course des pièces directement associées à un petit moteur électrique destiné à ces manoeuvres ; l'obtention du résultat a été notamment atteint en écartant la solution traditionnelle d'un moteur de réarmement qui soit directement associé au bouton de commande manuelle.
- D'autres particularités et avantages de l'invention apparaîtront mieux à la lecture de la description ci-dessous et à l'examen des figures annexées parmi lesquelles :
- La figure 1 représente schématiquement la structure d'un appareil contacteur à ouverture automatique et à commande locale ;
- La figure 2 illustre une vue partielle en élévation du mécanisme de l'appareil coupé par un plan passant par l'axe de l'organe de commande manuelle ;
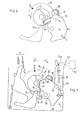
- La figure 3 représente une vue de dessus du mécanisme dans une coupe passant sensiblement par le plan P4 de la figure 2 ;
- La figure 4 représente une vue de dessus du mécanisme en position de fermeture et coupé par un plan P2 ;
- Les figures 5a, 5b, 5c représentent dans deux vues analogues à celles de la figure 4 deux étapes successives d'une manoeuvre d'ouverture manuelle de l'appareil ;
- La figure 6 illustre un détail de la figure 5b ;
- La figure 7 représente dans une vue analogue à celle de la figure 4, la position des pièces mobiles lorsque s'est produit un déclenchement automatique de l'appareil ;
- La figure 8 illustre dans une vue analogue à celle de la figure 4 la position des pièces du mécanisme lorsque l'appareil est en position fermée ;
- La figure 9 montre dans une vue de dessus partielle une partie du mécanisme qui communique et provoque une opération de déclenchement automatique.
- La figure 10 représente une vue de dessus de deux pièces coopérant lors d'une opération de réarmement manuel et dans la position correspondante du bouton de réarmement ;
- La figure 11 représente une vue en élévation partiellement coupée d'une partie des pièces de la figure 10 ;
- La figure 12 représente le circuit électrique d'un module amovible apte à opérer le réarmement à distance d'un appareil contacteur ;
- La figure 13 montre de façon simplifiée la constitution interne d'un module de réarmement à distance tel que celui de la figure 12
- La figure 14 représente une vue de dessus d'un mécanisme tel que celui représenté aux précédentes figures en position de fermeture, une pièce supplémentaire, nécessaire au réarmement à distance ayant été ajoutée ;
- Les figures 15a, 15b, 15c, 15d, 15e montrent un mécanisme tel que celui de la figure 14 à différentes étapes de son fonctionnement de réarmement télécommandé ;
- La figure 16 représente de façon simplifiée l'association de trois boîtiers contenant respectivement un appareil contacteur, un module de signalisation et un module de commande à distance ;
- La figure 17 représente un schéma des points parcourus par un coulisseau de réarmement au cours d'une tentative de réarmement suivie ou non de succès.
- Le schéma de principe d'un appareil interrupteur dans un boîtier isolant 20 ayant des contacts de puissance dont la fermeture et l'ouverture sont susceptibles d'être commandées à distance, comme c'est le cas des contacteurs, et présentant en outre des moyens d'ouverture automatique qui agissent lorsque apparaissent sur le circuit de puissance qui alimente une charge des surcharges de différentes natures, est illustré à la figure 1.
- Un électro-aimant 1 ayant une bobine 3 placée en série avec un interrupteur de sécurité 4 dans le circuit de commande 7 et entre les bornes de commande 5 et 6, attire une armature 29 contre l'action d'un ressort de rappel 36.
- Les mouvements de l'armature sont transmis par des actions maintenues "f" et "f" à un contact mobile 2a d'un interrupteur de puissance 2 qui est appliqué vers des contacts fixes 2c, 2b par un ressort de pression de contact 15.
- Le circuit de puissance 8 de l'appareil, placé entre les bornes de puissance 9 et 10, comprend l'interrupteur 2, une bobine 11 à laquelle est associé un percuteur magnétique 28, une bobine magnétique 13 à laquelle est associée une palette 34 et une bilame 14. Il faut comprendre que plusieurs circuits de puissance par exemple trois, peuvent être disposés dans l'appareil pour l'alimentation de charges polyphasées. Lorsque des courants de court-circuits francs apparaissent dans le circuit 8, le percuteur 28 soulève le contact mobile 2a par une action instantanée "a" et ce dernier reste accroché en position d'ouverture derrière un verrou 28a. Un déplacement subi par le verrou à cette occasion transmet une action "q" à un premier dispositif à déclenchement brusque 17.
- Lorsque des courants de surcharge importants, apparaissant par exemple lorsqu'un moteur représentant la charge est bloqué, circulent dans le circuit 8, la palette 34 transmet une action "b" à un deuxième dispositif à déclenchement brusque 19.
- Lorsque des courants intenses circulent pendant un intervalle de temps suffisant pour mettre la charge 8a en danger, la bilame 14 se déforme et communique une action "c" au deuxième mécanisme 19.
- Lorsque l'une des actions "b" ou "c" est appliquée au dispositif 19, celui-ci délivre une action "r" au premier dispositif à déclenchement brusque 17.
- Le premier dispositif 17 est donc libéré ou déclenché lorsque l'une de trois surcharges anormales apparaît dans le circuit (10, 9, 8, 8a).
- Lorsque le dispositif 17 est déclenché, il produit à son tour une action "p" qui est appliquée à un troisième dispositif à déclenchement brusque 31. Ce dernier transmet alors une action brusque "e" pour ouvrir l'interrupteur 4, et l'électro-aimant 1 est désexcité.
- Les premier et troisième dispositifs 17 respectivement 31 coopèrent par des actions "m" et "m" respectivement j et j avec un organe de transmission rotatif 32, qui est solidaire d'un bouton de commande manuelle locale 18 pouvant se déplacer devant une échelle 33 comportant dans cet ordre quatre positions "F", "D", "0" et "R".
- L'organe 32 est associé à un ressort de rappel 35 qui tend à le déplacer dans un sens K.
- A l'état de repos de l'appareil, pour lequel le bouton 18 est en position "0", l'interrupteur 4 est ouvert, le contact mobile 2a est soumis à l'action "f" et est ouvert mais, aucune surcharge n'étant apparue auparavant, le contact mobile n'est pas accroché par le verrou 28a ; le premier et le deuxième dispositifs 17 respectivement 19 sont armés et le troisième dispositif 31 est déclenché.
- Les coopérations établies entre le troisième dispositif 31 et l'organe de transmission 32 sont telles qu'une action manuelle exercée sur le bouton 18, à partir de la position d'ouverture "O" de ce dernier, et jusqu'à la position "F" réalise par l'action "m" l'armement du dispositif 31 et donc la fermeture de l'interrupteur de contrôle 4 par l'action "e". L'organe 32 est alors maintenu dans une position "F" stable par l'action "m".
- L'appareil est maintenant prêt à fonctionner, et l'interrupteur 2 sera fermé lorsqu'une tension convenable sera appliquée entre les bornes 5 et 6 afin d'alimenter la charge.
- Les coopérations établie entre l'organe 32 et le dispositif 17 sont telles que lorsqu'une action "r" ou "q" est exercée sur ce dernier, les actions "p" et "j" sont fournies simultanément à l'organe 32 et au dispositif 31 qui délivre l'action "m".
- L'action "m" provoque alors l'action "e" qui ouvre l'interrupteur 4 et libère l'organe 32, tandis que l'action "j" place dans le chemin suivi par cet organe une butée apte à arrêter ce dernier dans une position d'ouverture automatique de l'interrupteur 2 consécutive à l'apparition d'un défaut. L'utilisateur, ayant à rechercher les causes de l'apparition de ce défaut, devra alors placer le bouton 18 dans la position stable d'ouverture volontaire "O" définie ci-dessus. Lorsque le défaut aura été localisé, et que sa cause aura été écartée, la remise en service de l'appareil sera effectuée grâce à une action manuelle de l'opérateur exercée sur le bouton 18 pour l'amener tout d'abord dans la position instable de réarmement "R".
- Pour cette position, ou au cours du déplacement effectué pour l'atteindre, une action "
j " établie par l'organe 32 vers le dispositif 17 provoque l'armement de ce dernier et l'apparition des actions "r" et "q". - L'action "r" provoque l'armement du dispositif 19 tandis que l'action "q" bascule le verrou 28a et libère le contact mobile 2a. On comprend que ce dernier ne peut toutefois s'appliquer sur les contacts fixes 2b, 2c en raison de la présence de l'action maintenue "f".
- Lorsque l'action manuelle n'est plus exercée, le bouton 18 et l'organe 32 retrouvent élastiquement leur position de repos "0" et l'appareil se trouve dans le même état que celui mentionné ci-dessus pour une nouvelle mise en service. Le mécanisme 100 qui effectue les fonctions illustrées à la figure 1 par les repères 4, 17, 18, 31, 32, 33, 35 est représenté à la figure 2 dans une coupe passant par l'axe XX' du bouton de commande rotatif 18. Ce bouton est emmanché sur un arbre prismatique 40, ayant par exemple une section carrée, dont une arête a été chanfreinée afin d'éviter de possibles erreurs d'orientation. Cet arbre qui traverse la pièce rotative 32 pour l'entraîner, est pivoté d'une part à une extrémité inférieure 40' dans un alésage 42 d'une platine inférieure 44, et d'autre part dans une région supérieure grâce à une portée cylindrique 32' de cet organe 32 qui est pivoté dans un alésage 41 d'une platine supérieure 43 parallèle à la précédente.
- L'organe de transmission 32 présente dans trois plans Pl, P2, P3, parallèles entr'eux et perpendiculaires à l'axe XX', des surfaces de cames 45, 46, 47 dont la fonction sera précisée ultérieurement.
- Une pièce métallique 52 solidaire de cet organe 32 porte un doigt 51 qui coopère avec une extrémité 50 d'un ressort hélicoïdal travaillant en torsion, et dont une autre extrémité 49 coopère avec un appui 57 de la platine 44, voir aussi la figure 3 ; ce ressort communique à l'organe 32 un couple de sens anti-horaire K.
- Entre les deux platines sont par ailleurs placées deux tiges cylindriques 53, 54 d'axes YY' et ZZ' parallèles à XX' autour desquelles peuvent respectivement pivoter un levier de verrouillage 55 et un levier de déclenchement 56, voir figures 2, 3 et 4.
- Ce levier de verrouillage 55, voir en particulier la figure 4, présente deux bras 55a, 55b opposés dont l'un 55a porte un appui 61 et est associé à un ressort de rappel 58 qui lui communique un couple de sens K ; l'autre bras 55b porte d'une part, autour d'une articulation 60 un cliquet 59 qui est soumis à un couple de sens K fourni par un ressort de compression 69 placé entre un bras 68 de ce cliquet et le levier 55, et présente d'autre part une surface de percussion 76.
- Un autre bras 66 du cliquet présente un crochet représenté par exemple par un téton cylindrique 67 parallèle à XX' et placé dans le plan P2. Enfin sur la tige 53 est également placé un levier de contact isolant 62 ayant une extrémité 63 qui peut séparer un contact mobile 64 d'un contact fixe 65, ces deux contacts appartenant à l'interrupteur de sécurité 4.
- Un ressort hélicoïdal 73 dont les spires sont placées autour de la tige 53 présente une extrémité 73 qui est liée en un point 74 du levier de contact, et une extrémité libre 75 ; ce ressort, qui est placé en contrainte élastique de torsion entre le point 74 et une butée 130 du levier de contact, est par suite libre de s'orienter autour de la tige 53, avec le levier de contact 63 tout en étant limité en déplacement par l'appui 61 que le levier 55 peut amener à faire coopérer avec le levier de contact.
- La came 46 de l'organe de transmission 32 présente dans le plan P2 en regard du crochet 67 une surface de maintien 70 sensiblement radiale, une surface d'appui cylindrique interne 93 et une surface d'appui cylindrique externe 71. Dans la position des diverses pièces, représentée à cette figure 4, où l'organe 32 est en position F, un bossage 72 du levier de verrouillage s'appuie sur la surface 71 sous l'effet du ressort 58 et la surface de maintien 70 est retenue par le crochet 67, car le ressort 35 associé à l'organe 32 exerce sur ce crochet une force, voir la flèche correspondante, qui n'est pas suffisante pour faire basculer soit le verrou 59 soit le levier 55 ; le levier de contact 62 permet ainsi à l'interrupteur d'être fermé.
- Le levier de déclenchement 56, qui est soumis à un couple de sens anti-horaire L par le ressort de traction 79 s'appuie en position inactive I, grâce à une dent 80 placée à sa périphérie, contre un bec 81 appartenant à un verrou 82 qui peut basculer autour d'un axe parallèle à ZZ'.
- Ce levier de déclenchement présente encore un marteau 91 placé dans le plan P2 en regard de la surface de percussion 76, une surface de butée 92 placée en regard de la surface 93 et une première surface coopérante 94.
- Ainsi que cela est visible à la figure 3, le verrou 82 reçoit un couple de sens horaire L d'un ressort de compression 84, et présente deux bras 85 et 86 qui peuvent recevoir des pousées q et r transmises respectivement par une portion repliée 89 d'un premier tiroir 87 (partiellement représenté en pointillés en raison de sa situation sous la platine 44) et respectivement par une extrémité 90 d'un second tiroir 88, ces deux tiroirs se déplaçant parallèlement aux plans Pl, P2, P3.
- Une poussée q ou une poussée r exercée sur le verrou 82 produit une rotation anti-horaire de celui-ci qui dégage le bec 81 de la dent 80 et permet au levier le déclenchement 56 de pivoter en sens anti-horaire sous l'action du ressort 79. Ce mouvement amène le marteau 91 à percuter la surface de percussion 76 et produit une rotation de sens horaire K du levier de verrouillage 55 dont l'appui 61 entraîne avec lui le levier de contact 62 dans le même sens pour ouvrir l'interrupteur 4, tandis que le crochet 67 se dégage de la surface de maintien 70 pour libérer l'organe de transmission 32. Le levier de déclenchement 56 s'arrête dans une position de travail T pour laquelle la surface de butée 92 rencontre la surface d'appui 93, voir figure 8.
- La rotation de sens K de cet organe de transmission 32 amène ensuite la surface 70 à rencontrer la surface d'arrêt 94, du levier de transimission 56, voir figure 7, et l'organe de transmission 32 ainsi que le bouton de commande 18 s'arrêtent dans une position de déclenchement D pour laquelle le crochet 67 s'appuie sur la surface d'appui 71 ; ceci qui a pour effet de maintenir le levier de verrouillage 55 dans une position pour laquelle l'ouverture de l'interrupteur 4 est confirmée.
- Cet état déclenché du mécanisme, qui ne peut être obtenu que si des actions q ou r consécutives à des surcharges de différentes natures se sont manifestées, est par ailleurs signalé extérieurement par un dispositif de visualisation 21 si l'action q a été déterminante grâce au déplacement d'un témoin 23 porté par une pièce 25 qui est mobile autour de l'axe XX' et qui est associée à une patte 97a du tiroir 87 et à un ressort de rappel 24. Ce dispositif de signalisation 21 place dans ce cas le témoin 23 en regard d'une ouverture 22 du boîtier 20 de l'appareil, voir figure 3, et signale donc l'apparition d'un court-circuit franc.
- La mise en position d'ouverture 0 par voie manuelle après l'apparition d'un déclenchement, et donc après l'arrêt de l'organe de transmission 32 en position D, est obtenue par une rotation supplémentaire de même sens K appliquée au bouton de commande 18. Au cours de ce mouvement, un couple de sens horaire L est communiqué par la surface de maintien 70 de l'organe de transmission à la surface d'arrêt 94 du levier de déclenchement 56, voir la figure 7, et contre l'action du ressort 79.
- Lorsque les deux pièces 32 et 56 se sont déplacées d'une certaine valeur angulaire, la dent 80 se présente en regard du bec 81 et, si les actions q ou r ne sont plus présentes, celui-ci s'engage derrière la dent 80 de façon à maintenir le levier de déclenchement en position I. En raison du couple communiqué par le ressort 35, la surface de maintien 70 continue de s'appuyer contre la surface d'arrêt 94 et procure aux pièces 18 et 32 une position stable d'ouverture 0.
- Par contre la mise en position d'ouverture 0 par voie manuelle, à partir de la position de fermeture F et donc si aucune surcharge n'est apparue, ne fait pas intervenir un déroulement analogue dans la mesure où le levier de déclenchement 56 est déjà maintenu en position par le verrou 82. Une telle manoeuvre produit toutefois une ouverture brusque de l'interrupteur 4 grâce au fait qu'un effort manuel de sens K appliqué au bouton de commande 18 provoque un pivotement élastique du cliquet 59 par rapport au levier de verrouillage 55 jusqu'au moment où le crochet 67, ayant légèrement dépassé l'arête commune aux surfaces 70 et 71, se glisse brusquement sur la surface d'appui externe 71 et repousse ainsi le levier 55 dans le sens horaire L, voir figures 5a, 5b et 6.
- Lorsque après un déclenchement automatique l'organe de transmission 32 et le levier de déclenchement 56 ont été amenés par l'opérateur dans les positions correspondant à l'état 0 du mécanisme de l'appareil, aucune action visant à effectuer un réarmement des dispositifs sensibles aux surcharges 88, 19 et 87, 28a, voir figure 1, n'a encore été effectuée.
- Une telle action de réarmement, qui s'effectue par une rotation manuelle supplémentaire du bouton de commande 18 de sens K, allant de la position 0 à la position R du bouton 18 (voir figure 6), commence au moment où, dans cette position 0, une surface de réarmement 77 appartenant à la came 47 de l'organe de transmission 32 et se trouvant en regard d'un prolongement 78 du levier de déclenchement 56 rencontre celui-ci pour le repousser dans le sens horaire L jusqu'au moment où le levier de déclenchement 56 atteint une position A visible à la figure 10. Afin que la continuité du mouvement allant de D vers R en passant par 0 soit assurée, les surfaces 70 et 77 et les surfaces 94 et 78 sont décalées de valeurs angulaires alpha et respectivement beta, voir figure 5b, qui produisent un effet d'engrènement.
- Au cours de cette rotation supplémentaire, le levier de déclenchement 56 joue également le rôle d'un levier de réarmement grâce à deux ergots 95 et 96 qui repoussent des portions 97b et 98 appartenant aux deux tiroirs 87 et respectivement 88, voir figures 10 et 11. On retrouve sur la figure 1 sous la désignation q et r les actions de réarmement correspondantes qui sont appliquées aux dispositifs détecteurs 28a et 19. Le levier 56 est donc une pièce commune de déclenchement et de réarmement.
- Lorsque le réarmement est opéré, l'organe de transmission 32 revient de lui même en sens L vers la position 0 sous l'effet du ressort 35, ce qui donne un caractère instable à la position R.
- Toutefois si une bilame encore chaude empêche le réarmement du dispositif 19, le tiroir 88 continue d'appliquer une action r au verrou 82, voir figure 9, de sorte que le levier de déclenchement 56 ne peut s'arrêter en position I et poursuit une progression de sens anti-horaire K jusqu'à la position T pour laquelle l'organe de transmission 32 est repoussé par le levier 56 sous l'effet du ressort 79 et occupe la position D de la figure 7.
- Dans tous les cas, la position D est stable et résulte de l'égalité et de l'opposition des couples fournis par les ressorts 79 et 35 aux surfaces 94 et 70 des pièces 56 et respectivement 32.
- Au mécanisme 100 logé dans le boîtier 20 et qui vient d'être décrit est adjoint un dispositif de réarmement à distance 101 qui est par exemple logé dans un boîtier annexe 160 et qui devra effectuer, en cas de déclenchement automatique, une opération de réarmement des dispositifs à rupture brusque 17, 31 et 19 ; cette opération ne doit, d'une part, être possible que si, après un déclenchement automatique le dispositif à rupture brusque 17 est lui-même en état d'être réarmé ; cet état de réarmement possible est acquis si le dispositif à rupture brusque 19 ne délivre pas en permanence une action "r" provoquée par une bilame 14 encore chaude. D'autre part, cette opération ne doit pas pouvoir être engagée si le mécanisme n'a pas été déclenché automatiquement et se trouve en position F, car dans ce dernier cas cette opération est inutile.
- Cette opération doit être interdite ou tout au moins une information correspondante doit être fournie en vue de l'éviter, si le mécanisme se trouve dans une position d'ouverture volontaire 0, qui lui a été donnée par une action manuelle exercée par un opérateur placé à proximité de l'appareil ; une telle ouverture volontaire peut en effet avoir été décidée par cet opérateur pour effectuer l'inspection d'une machine alimentée par l'appareil et ceci à l'insu d'une autre personne placée à distance, de sorte qu'un réarmement télécommandé par cette personne pourrait avoir de graves conséquences, soit en raison du rétablissement de la tension sur la ligne d'alimentation, soit en raison du démarrage d'un processus dont tous les appareils ne seraient pas en état de marche.
- Le dispositif de réarmement à distance comprend principalement (voir figures 12 et 13), un petit moteur électrique 102, un réducteur de vitesse 103, une came d'armement hélicoïdale ou en colimaçon 104, un poussoir d'armement 105, rappelé contre la came par un ressort 105a, et un circuit électrique interne 106 comprenant dans le boîtier 160 trois bornes propres 107, 108, 109, deux interrupteurs 112, 113 et naturellement le moteur 102. Le circuit de commande complet comprend de plus un interrupteur externe de télécommande 111 et deux bornes de raccordement au réseau 114, 115.
- Afin qu'une impulsion de courant, délivrée par l'interrupteur à distance 111, soit suffisante pour mettre le dispositif en route, l'interrupteur d'auto-alimentation 112 est placé en parallèle sur lui entre une borne 116 du moteur et une première borne de réseau 114, le retour de courant s'effectuant entre une seconde borne 117 du moteur et la borne de réseau 115. Cet interrupteur 112 se substitue à l'interrupteur 111 dès que le poussoir d'armement 105 s'est mis en mouvement et reste fermé jusqu'au moment où la came 104 ayant fait par exemple un tour complet reprend sa position de départ pour laquelle l'interrupteur 112 est ouvert, ce qui arrête le moteur.
- Afin que la mise en route du dipositif soit rendue impossible lorsque le mécanisme 100 n'est pas en position de déclenchement D, l'interrupteur d'autorisation 113 qui ne sera fermé que pour cette position de déclenchement est placé entre la borne 116 du moteur et l'interrupteur 111. Cet interrupteur d'autorisation est actionné par un poussoir 136 qui coopère, comme on le verra ci-après, avec une pièce particulière du mécanisme 100.
- A l'état de repos du dispositif de réarmement et du circuit électrique, les interrupteurs 111 et 112 sont ouverts et l'interrupteur 113 n'est donc fermé que si le mécanisme 100 est en position de déclenchement D. En raison des multiples actions qui doivent être effectuées par le dispositif de réarmement sur le mécanisme 100, un poussoir d'armement tel que représenté schématiquement en 105 à la figure 13 ne pourrait convenir à lui seul.
- Une pièce d'entraînement prenant la forme d'un coulisseau 118 a donc été associée au mécanisme 100 qui comporte lui-même des organes ou présente des mesures particulières destinées à établir avec ce couliseau les coopérations nécessaires.
- En se reportant à la figure 14 où le mécanisme de l'appareil 100 est placé en position F, on constate que la pièce d'entraînement l18 est formée par un coulisseau mobile le long d'un axe QQ' qui est parallèle aux platines 43, 44 et donc perpendiculaire aux axes XX', YY', ZZ'.
- Ce coulisseau, qui pourrait le cas échéant être remplacé par une pièce pivotante ayant un mouvement voisin, présente une ouverture allongée l19 qui est traversée avec un faible jeu par le pivot 54 de la pièce 56 et une extrémité 120, grâce auxquelles est effectué le guidage en translation.
- Ce coulisseau présente, en outre, des premier, second et troisième points d'appui 121, respectivement 122, respectivement 123 et une seconde extrémité 124 qui est opposée à ces points d'appui. Ce coulisseau est maintenu contre une butée 125 du boîtier par un ressort de rappel 126 qui place l'extrémité 124 en regard d'une ouverture 127 du boîtier 20 de façon à pouvoir coopérer avec l'extrémité 134 du poussoir d'armement 105.
- La pièce de transmission 32 présente dans une région supérieure 128, par laquelle passe le plan P1 voisin de la platine 43 et contenant le coulisseau 118, une surface de poussée 131 appartenant à une came 45 dont la position angulaire est décalée d'un angle phi par rapport à la surface 70 voir figures 2 et 14 ; cette surface 131 est placée en regard du point d'appui 121 et en est séparée par une certaine distance d1 lorsque la pièce de transmission est en position D et que le coulisseau 118 se trouve contre la butée 125 dans une position de repos So indiquée en pointillés à la figure 15a.
- Le second point d'appui 122 qui appartient ici à une rampe inclinée 122a, est placé en regard d'une seconde surface de poussée 132 représentée par l'extrémité 75 du ressort 73 ; une distance d2 sépare ce point d'appui 122 et cette surface 132 lorsque, la pièce 32 étant en position D le levier de verrouillage 55 est en position B, et que le levier de contact 62 est en position G.
- Le troisième point d'appui 123 est placé en regard d'une troisième surface d'appui 133 qui est portée par le téton 95 du levier commun de déclenchement et d'armement 56, dans une région de celui-ci, opposée à la patte 97, voir aussi les figures 10 et 11, et se trouve séparée de cette surface par une distance d4 lorsque le levier de déclenchement et d'armement 56 est dans sa position de travail T et que le coulisseau 118 est en position S , voir figure 15a. Au cours d'une première partie du trajet du coulisseau 118, ou trajet aller, communiquée au coulisseau 118 par la came 104 et l'extrémité 134 du poussoir 105, et qui s'étend de la position de repos ou de départ S jusqu'à une position extrême S5 en passant par les points S1, S2, S3' S4, les points d'appui 121, 122, 123 vont rencontrer les surfaces de poussée placées en regard 131 respectivement 132, respectivement 133 pour opérer d'une part des phases préparatoires aux réarmements des dispositifs à déclenchement brusque 17 (pièce commune 56) et 31 (levier de maintien 55), et assurer d'autre part le maintien à l'état ouvert de l'interrupteur 4.
- Pendant cette phase préparatoire l'organe de transmission 32 et la pièce commune 56 vont donc tourner dans le même sens L. La disposition qui a été choisie permet ainsi de ne pas faire effectuer à l'organe 32 en raison de la disposition respective des points d'appui et des axes XX', YY', ZZ' des pièces rotatives 32, 56, 55, un déplacement comparable à celui qui est effectué lors d'un réarmement manuel, et permet donc de réaliser un système de télécommande moins coûteux tout en restant aussi efficace.
- Lorsque les surfaces et points d'appuis 121, 131 respectivement 123, 133, seront en contact, le coulisseau 118 déplacera l'organe 32 directement vers la position F et la pièce 56 vers la position A, cette position étant plus éloignée de la position T que la position I pour laquelle la dent 80 passe devant le verrou 82. Au cours de ce trajet le coulisseau l18 passe par exemple d'abord au point tel que S1 où les butées 95, 96 de la pièce commune 56 rencontrent les tiroirs 97b, 87 et 98, 88 pour les repousser et réarmer les dispositifs 19 et 28a, ensuite au point S3 lorsque la dent 80 de la pièce 56 est en regard du bec 81, ultérieurement au point S4 lorsque le crochet 67 après avoir glissé contre la surface 71 se trouve en regard de la surface 70, et finalement au point 55 où la pièce 56 est en position A. La situation du coulisseau 118 au point S4 permet donc au levier de verrouillage 55 de prendre la position C illustrée à la figure 4, car entretemps le marteau 91 se trouvant dans une position voisine de A ne s'appuie plus sur la portée 76. Ceci ne doit pas pour autant provoquer la fermeture de l'interrupteur 4, car une telle fermeture permettrait à l'électro-aimant 1 de refermer instantanément les contacts 2, qui ont été ouverts en raison de l'apparition d'une surcharge, sans que l'on soit sûr qu'une réalimenta- tion de la ligne 8 soit justifiée.
- Dans le mécanisme qui vient d'être décrit, cette fermeture est rendue impossible grâce à la coopération des surfaces et points d'appui 132 et 122. Cette coopération, qui commence suffisamment tôt par exemple au point 52 du trajet du coulisseau 118 présente une propriété de limitation de la course du levier de contact 62 qui est obtenue grâce à l'élasticité du ressort 73 et grâce à la présence sur le boîtier 20 d'une butée telle que 12a ou 12b, voir figure 15e. Cette élasticité et ces butées sont susceptibles d'empêcher une trop grande déformation du contact mobile 64 et d'arrêter le levier 63 en position H, indépendamment de la course totale du coulisseau 118.
- Au cours du trajet aller du coulisseau 118, celui-ci atteint un point extrême Se pour lequel l'organe 32 dépasse la position F et pour lequel la pièce commune 56 atteint la position A (voir la figure 15c).
- Lorsque la phase préparatoire est terminée au point S5, et que les causes des défauts ou surcharges ont disparu (bilame froide) le trajet de retour du coulisseau l18 vers le point de retour S11, passe par un point S6 qui est situé sensiblement au même endroit que S4 et pour lequel la pièce 32 reste accrochée en position F par le levier de verrouillage 55. Les contacts de l'interrupteur 4 restent cependant encore ouverts et les tiroirs restent par exemple accrochés dans des positions de réarmement propres par des moyens non représentés et en un point S7.
- Le trajet de retour du coulisseau 118 passe ensuite par un point S8 situé sensiblement au même endroit que S3 pour lequel la dent 80 se présente en regard du bec 81 ; ce dernier est alors apte à retenir la pièce commune 56, puisque l'accrochage des tiroirs 87 et 88 étant réalisé, ceux-ci n'agissent plus sur le verrou 82. Lorsque le coulisseau s'arrête au point de retour S11 l'opération de réarmement est terminée et le bouton de commande 18 est en position F.
- Si les causes ayant provoqué une surcharge n'ont pas disparu depuis suffisamment longtemps et que par exemple une bilame 14 chaude empêche le réarmement du dispositif 19 une action r, encore présente, fait appuyer le tiroir 88 contre le verrou 82 et au moment où la dent 80 passe devant le bec 81 au point S8 aucun accrochage de la pièce 56 ne se produit ; celle-ci poursuit donc un mouvement qui la dirige vers sa position T jusqu'au moment où pour le point S9 de la course du coulisseau 118 le marteau 91 rencontre la portée 76 du levier de verrouillage 55 ce qui dégage le crochet 67 de la surface 70 et libère l'organe 32.
- Le coulisseau 118, se trouve à ce moment là au point S9 pour lequel l'interrupteur 4 qui était encore ouvert, voit son ouverture confirmée par le basculement du levier 55, tandis que l'organe 32 retrouve sa position correspondante de déclenchement D. La tentative de réarmement a donc dans ce cas échoué, ce qui répond bien au but fixé, et le coulisseau se retrouve au point de retour S11, après être passé par un point.S10 où le levier de contact 62 n'étant plus sollicité par le coulisseau, l'interrupteur 4 se referme. Au cours de cette tentative de réarmement, qui aurait pu être dangereuse si elle avait réussi l'interrupteur 4 est constamment resté ouvert pour empêcher une nouvelle excitation de l'électro-aimant 1 (voir figure 17).
- Si les causes ayant provoqué un déclenchement sont du type court-circuit franc ou court-circuit impédant, sans apparition d'un échauffement important de la bilame, et que l'on n'ait pas porté remède à leur origine, une tentative de réarmement peut se dérouler avec succès jusqu'à son terme. Toutefois au moment où s'effectue la fermeture de l'interrupteur 4, et donc l'excitation de l'électro-aimant 1, la fermeture des contacts 2 provoque l'apparition de courants suffisamment importants dans le circuit de puissance pour que les dispositifs magnétiques 13, 43 ou 11, 28 provoquent une nouvelle ouverture par le déclenchement des dispositifs 19, 17 et 31. Afin qu'une tentative de réarmement ne puisse être engagée que si l'appareil se trouve en position déclenchée, un doigt tel que 96 porté par la pièce commune 56 soulève pour la position correspondante T de celle-ci un petit coulisseau 151 dont une rampe 151a actionne directement ou indirectement un interrupteur d'autorisation tel que 113, voir figures 7 et 13.
- Dans de nombreux cas d'utilisation industrielle d'un contacteur à ouverture automatique et à réarmement à distance, on souhaite connaître l'état de l'appareil et les raisons de son ouverture sans pour autant envoyer sur place une personne de maintenance.
- Ceci peut être obtenu en associant au boîtier 20 d'un appareil contacteur C un module de signalisation Si et un module de réarmement à distance RD, ainsi que cela est montré à la figure 16 où entre la face latérale 139 du contacteur C0 et la face latérale et parallèle 138 du module RD est disposé un boîtier 140 contenant divers interrupteurs.
- La transmission de mouvement entre les boîtiers 20 et 160 est faite par exemple à l'aide de poussoirs placés dans le boîtier 140 tels que le poussoir 145 pour la communication du mouvement de réarmement motorisé, et les poussoirs 152 et 143 pour la manoeuvre de l'interrupteur d'autorisation 113. Comme ce dernier est actionné vers la fermeture, lorsque le contacteur est dans son état déclenché D le poussoir 152 (qui est par exemple en appui sur une rampe d'un petit coulisseau 151 actionné par la pièce commune 56) ferme en même temps par exemple un interrupteur 142 servant à signaler à distance l'état correspondant.
- D'une manière comparable, l'interrupteur 146 du boîtier 140 peut être actionné par une extrémité 150 du tiroir 87 pour signaler l'apparition d'un court-circuit, tandis que l'interrupteur 144 peut être actionné par le coulisseau 88 pour signaler l'apparition d'un défaut dû à un court-circuit impédant ou à une surcharge moins importante mais prolongée. Enfin, et pour éviter que la mise en route à distance d'une installation soit décidée alors que certains contacteurs ont pu être mis dans la position d'ouverture par une action volontaire sur le bouton 18, un interrupteur, placé dans le boîtier 140 mais non représenté pour ne pas surcharger le dessin, est également disposé dans le boîtier 140 en coopération avec un poussoir ou petit tiroir placé dans le boîtier 100 de façon à être actionné lorsque le bouton de commande locale 18 est dans sa position d'ouverture manuelle 0.
- Comme la position de ces interrupteurs, à l'intérieur du boîtier 140, est avantageusement située en regard des pièces mobiles du mécanisme qui les actionnent, un volume résiduel 154 de ce boîtier peut être utilisé pour recevoir des interrupteurs auxiliaires 141 susceptibles d'être commandés par une pièce solidaire de l'armature mobile 29 de l'électro-aimant 1 du contacteur Co.
- Le boîtier 140 du module de signalisation S i est enfin équipé de bornes telles que 147 pour effectuer les raccordements des interrupteurs internes aux appareils extérieurs, tandis que des moyens de fixation tels que 155, 156 sont utilisés pour maintenir les boîtiers 20, 140 et 160 les uns contre les autres.
Claims (14)
caractérisé en ce que l'organe de transmission (32) présente entre deux platines parallèles (43, 44) une série de surfaces de cames superposées (45, 46, 47) qui sont aptes à coopérer avec le levier de verrouillage (55) et avec une pièce commune prenant la forme d'un levier pivotant (56) apte à coopérer avec un verrou pivotant (82), cet organe, ce levier de verrouillage et cette pièce commune ayant des axes de pivotement (XX', YY', ZZ') parallèles entr'eux et perpendiculaires aux platines entre lesquelles ils sont placés.
caractérisé en ce qu'une première surface (70) de came (46) de l'organe de transmission (32) qui s'appuie sur le crochet (59) en deuxième position (F) et qui coopère avec une première surface (94) de la pièce commune (56) pour la troisième position (D), repousse cette première surface jusqu'à un point (I) où une seconde surface de came (77) de cet organe de transmission, qui est décalée angulairement (alpha) par rapport à la première (70) repousse une seconde surface de came (78) de cette pièce commune, qui est décalée angulairement (beta) par rapport à la première (94) pour amener cet organe de transmission dans la quatrième position (R).
caractérisé en ce que dans le boîtier (100) est disposé un coulisseau de réarmement (118) qui est apte à coopérer :
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR8221317 | 1982-12-20 | ||
| FR8221317A FR2538160B1 (fr) | 1982-12-20 | 1982-12-20 | Appareil contacteur a actionnement electromagnetique controle et a ouverture automatique lors de l'apparition de surcharges |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0114542A1 true EP0114542A1 (fr) | 1984-08-01 |
| EP0114542B1 EP0114542B1 (fr) | 1986-06-11 |
Family
ID=9280272
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19830402353 Expired EP0114542B1 (fr) | 1982-12-20 | 1983-12-06 | Appareil contacteur à actionnement électro-magnétique contrôlé et à ouverture automatique lors de l'apparition de surcharges |
Country Status (7)
| Country | Link |
|---|---|
| EP (1) | EP0114542B1 (fr) |
| JP (1) | JPS59119635A (fr) |
| AU (1) | AU565448B2 (fr) |
| BR (1) | BR8306971A (fr) |
| DE (2) | DE3364100D1 (fr) |
| DK (1) | DK164342C (fr) |
| FR (1) | FR2538160B1 (fr) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0571258A1 (fr) * | 1992-05-22 | 1993-11-24 | Schneider Electric Sa | Appareil interrupteur de protection |
| CN101154538B (zh) * | 2006-09-29 | 2010-06-23 | 西门子公司 | 具有开关锁扣的开关装置 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0743913Y2 (ja) * | 1987-05-28 | 1995-10-09 | 三菱電機株式会社 | 多極回路しゃ断器 |
| JPH081549Y2 (ja) * | 1987-05-28 | 1996-01-17 | 三菱電機株式会社 | 多極回路しゃ断器 |
| FR2739487B1 (fr) * | 1995-09-28 | 1997-10-31 | Schneider Electric Sa | Dispositif de commande et de signalisation pour appareil de protection |
| FR2799573B1 (fr) | 1999-10-11 | 2001-12-14 | Schneider Electric Ind Sa | Mecanisme de commande de disjoncteur |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE315145C (fr) * | ||||
| DE623272C (de) * | 1935-12-16 | Neumann Hochspannungs App G M | Freilaufkupplungsgehaeuse fuer Rechts- und Linkseinschaltung von OElselbstausschaltern | |
| US2956135A (en) * | 1957-01-18 | 1960-10-11 | Clark Controller Co | Hand operated switch |
| US3384846A (en) * | 1966-11-23 | 1968-05-21 | Gen Electric | Current limiting circuit breaker mechanism |
| US3488609A (en) * | 1968-07-16 | 1970-01-06 | Gen Electric | Mechanism for current limiting circuit breaker |
| US3629744A (en) * | 1970-03-27 | 1971-12-21 | Westinghouse Electric Corp | Motor-operated circuit breaker |
-
1982
- 1982-12-20 FR FR8221317A patent/FR2538160B1/fr not_active Expired
-
1983
- 1983-12-06 DE DE8383402353T patent/DE3364100D1/de not_active Expired
- 1983-12-06 DE DE1983402353 patent/DE114542T1/de active Pending
- 1983-12-06 EP EP19830402353 patent/EP0114542B1/fr not_active Expired
- 1983-12-13 AU AU22361/83A patent/AU565448B2/en not_active Ceased
- 1983-12-19 BR BR8306971A patent/BR8306971A/pt not_active IP Right Cessation
- 1983-12-20 JP JP24182283A patent/JPS59119635A/ja active Granted
- 1983-12-20 DK DK587783A patent/DK164342C/da not_active IP Right Cessation
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE315145C (fr) * | ||||
| DE623272C (de) * | 1935-12-16 | Neumann Hochspannungs App G M | Freilaufkupplungsgehaeuse fuer Rechts- und Linkseinschaltung von OElselbstausschaltern | |
| US2956135A (en) * | 1957-01-18 | 1960-10-11 | Clark Controller Co | Hand operated switch |
| US3384846A (en) * | 1966-11-23 | 1968-05-21 | Gen Electric | Current limiting circuit breaker mechanism |
| US3488609A (en) * | 1968-07-16 | 1970-01-06 | Gen Electric | Mechanism for current limiting circuit breaker |
| US3629744A (en) * | 1970-03-27 | 1971-12-21 | Westinghouse Electric Corp | Motor-operated circuit breaker |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0571258A1 (fr) * | 1992-05-22 | 1993-11-24 | Schneider Electric Sa | Appareil interrupteur de protection |
| FR2691576A1 (fr) * | 1992-05-22 | 1993-11-26 | Telemecanique | Appareil interrupteur de protection. |
| US5339060A (en) * | 1992-05-22 | 1994-08-16 | Telemecanique | Protective switch |
| CN101154538B (zh) * | 2006-09-29 | 2010-06-23 | 西门子公司 | 具有开关锁扣的开关装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| DK164342B (da) | 1992-06-09 |
| DE114542T1 (de) | 1984-10-11 |
| DK587783D0 (da) | 1983-12-20 |
| DK164342C (da) | 1992-11-02 |
| AU2236183A (en) | 1984-06-28 |
| JPS59119635A (ja) | 1984-07-10 |
| FR2538160B1 (fr) | 1985-12-13 |
| BR8306971A (pt) | 1984-07-24 |
| EP0114542B1 (fr) | 1986-06-11 |
| AU565448B2 (en) | 1987-09-17 |
| DK587783A (da) | 1984-06-21 |
| DE3364100D1 (en) | 1986-07-17 |
| FR2538160A1 (fr) | 1984-06-22 |
| JPH0317338B2 (fr) | 1991-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0179677B1 (fr) | Dispositif de commutation à composition variable | |
| FR2538161A1 (fr) | Disjoncteur a mecanisme electromagnetique perfectionne de declenchement a minimum de tension | |
| EP0079818B1 (fr) | Appareil contacteur comportant des moyens d'ouverture automatique des circuits de puissance et un dispositif de commande locale | |
| EP0766280A2 (fr) | Dispositif de commande et de signalisation pour appareil interrupteur de protection | |
| EP0161946B1 (fr) | Bloc additif accouplable à un disjoncteur | |
| EP0114542B1 (fr) | Appareil contacteur à actionnement électro-magnétique contrôlé et à ouverture automatique lors de l'apparition de surcharges | |
| BE1004514A3 (fr) | Appareil interrupteur a contacts commandables par un electroaimant. | |
| EP0080687B1 (fr) | Commutateur électrique à commande rotative rappelé automatiquement en l'absence de tension | |
| EP0571258B1 (fr) | Appareil interrupteur de protection | |
| CH686853A5 (fr) | Appareil interrupteur de protection accouplable à un module de commande et/ou à un module de signalisation. | |
| EP4064317B1 (fr) | Dispositif de protection électrique et tableau électrique comprenant un tel dispositif de protection | |
| EP1649478B1 (fr) | Mecanisme de serrure a accrochage tournant pour coupe-circuit automatique de securite | |
| EP0136290B1 (fr) | Interrupteur de protection automatique a sectionnement visible et a rearmement manuel | |
| EP3629351B1 (fr) | Système d'actionnement pour appareil électrique interrupteur | |
| EP3232459B1 (fr) | Appareil électrique de protection de ligne | |
| FR2660793A1 (fr) | Relais thermique. | |
| EP0114541B1 (fr) | Dispositif de déclenchement pour un appareil interrupteur à coupure automatique ou commandée | |
| FR2621418A1 (fr) | Interrupteur de protection a ecran de coupure d'arc | |
| EP0543740B1 (fr) | Dispositif d'actionnement électromagnétique incorporé dans un bloc de télécommande | |
| EP3309813A1 (fr) | Appareillage de coupure electrique differentiel comportant un dispositif de test de la fonction differentielle | |
| FR2559307A1 (fr) | Contact equipe d'un compensateur magnetique autoliberable a partir d'un seuil de force de compensation, et contacteur-disjoncteur utilisant un tel contact | |
| EP4404232A1 (fr) | Dispositif de protection électrique et procédé de réarmement d'un tel dispositif | |
| FR2621417A1 (fr) | Interrupteur de protection a ecran de coupure d'arc | |
| EP2398034A1 (fr) | Dispositif de déclenchement auxiliaire destiné à être associé à un bloc disjoncteur | |
| FR2674677A1 (fr) | Commutateur du type antideflagrant comportant une commande de declenchement rapide de securite. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| ITCL | It: translation for ep claims filed |
Representative=s name: ING. A. GIAMBROCONO & C. S.R.L. |
|
| 17P | Request for examination filed |
Effective date: 19831208 |
|
| AK | Designated contracting states |
Designated state(s): CH DE GB IT LI SE |
|
| DET | De: translation of patent claims | ||
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): CH DE GB IT LI SE |
|
| ITF | It: translation for a ep patent filed | ||
| REF | Corresponds to: |
Ref document number: 3364100 Country of ref document: DE Date of ref document: 19860717 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| ITTA | It: last paid annual fee | ||
| EAL | Se: european patent in force in sweden |
Ref document number: 83402353.3 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19961129 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 19961218 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19971205 Year of fee payment: 15 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19971206 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19971207 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 19980106 Year of fee payment: 15 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 19971206 |
|
| EUG | Se: european patent has lapsed |
Ref document number: 83402353.3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19981231 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19981231 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19991001 |