-
Die
Erfindung betrifft ein Verfahren und eine Vorrichtung zum Steuern
eines statischen Wandlers, dessen Aufgabe es ist, eine Einstellung
einer elektrischen und/oder magnetischen und/oder mechanischen Regelgröße eines
Speisestroms zu justieren, der von diesem statischen Wandler zugeführt wird.
-
Eine
der Hauptanwendungen für
statische Wandler von elektrischer Leistung war schon immer die Versorgung
von Elektromaschinen mit veränderlicher
Frequenz, um auf diese Weise gute Leistungen an Geschwindigkeits-
und Positionsregelsystemen zu erhalten.
-
Ein
Drehstromwechselrichter ist ein statischer Wandler, der speziell
für die
Versorgung von Wechselstrommaschinen für Systeme ausgelegt ist, die
eine gute Antriebsqualität
(Präzision,
Linearität, Übergangsverhalten,
Stabilität)
in einem breiten Drehzahl- und
Lastvariationsbereich verlangen.
-
Die
Struktur des eingesetzten Spannungswechselrichters besteht herkömmlicherweise
aus einer einzelnen Kommutationszelle pro Phase, die eine Ausgangsspannung
mit einem Grad an Oberwellenverzerrung liefert, dessen Grenzen bekannt
sind. Dieser Wechselrichter, ein so genannter Zweipegel-Wechselrichter,
unterliegt jedoch technischen Grenzen in Verbindung mit seinem Funktionsprinzip.
-
Es
wurde eine neue Struktur für
einen Spannungswechselrichter entwickelt, mit dem die Amplitude von
Impulsen moduliert werden kann. Diese Mehrzellenstruktur, mit geschachtelten
Zellen, hat einen modularen Charakter und erlaubt eine merkliche
Verbesserung der Qualität
der angelegten Spannung, die mit der Zahl der Zellen zunimmt.
-
Diese
Mehrpegel-Serienwechselrichter können
als Hochleistungs-D/A-Wandler angesehen werden.
-
Außerdem sind
derzeitige digitale Signalprozessoren schnell und genau genug für eine direkte
Drehmomentregelung (DTC) der Wechselstrommaschine. Diese Regelstrategie
besteht darin, auf der Basis von Daten über die Momentanwerte von Drehmoment
und Fluss der Maschine direkt auf den Zustand des Wechselrichters
einzuwirken.
-
Diese
Regelstrategie hat sich rasch als bedeutende Innovation herausgestellt,
die es ermöglicht,
die Drehmomentregelansprechzeit von Wechselstrommaschinen drastisch
zu verbessern. Darüber
hinaus bleibt das Grundprinzip sehr einfach, da es darin besteht,
die Wechselrichterkonfiguration in Abhängigkeit vom Vorzeichen des
Drehmomentfehlers und vom Vorzeichen des Flussfehlers "direkt" zu wählen, was
insbesondere keinen Drehzahl- oder Positionssensor erfordert.
-
Derzeitige
Geräte
zum direkten Regeln des Drehmoments einer Asynchronmaschine, die
auf der Basis dieser Regelstrategie arbeiten, sind insbesondere
beschrieben in der
FR 2 744 302 oder
in Artikeln von NASH J. N.: "Direct
torque control, induction motor vector control without an encoder" IEEE TRANSACTIONS ON
INDUSTRY APPLICATIONS, Bd. 33, Nr. 2, März 1997, Seiten 333-341, XP000724904,
und in CHAPUIS Y A et al: Commande directe du couple d'une machine asynchrone
par le contrôle
direct de son flux statorique direct torque control", JOURNAL DE PHYSIQUE
III, Bd. 5, Nr.6, 1. Juni 1995, Seiten 863-880, XP000533453.
-
Gemäß diesem
letzteren Artikel macht insbesondere ein Zweipegel-Hysteresekomparator
einen Vergleich zwischen dem errechneten Drehmoment und einem Referenzdrehmoment
sowie zwischen dem errechneten Fluss und einem Referenzfluss. Die
Konfiguration des Wechselrichters wird in Abhängigkeit vom Vorzeichen des
Drehmomentfehlers und vom Vorzeichen des Flussfehlers ermittelt.
-
Die
Leistungen, die im Hinblick auf bestimmte Aspekte dieser Strategie
außergewöhnlich sind,
reichen jedoch nicht aus, um die Mängel in Verbindung mit einem
Betrieb mit veränderlicher
Frequenz vergessen zu lassen, nämlich
- – Zunahme
von Kommutations- oder Hystereseverlusten und Gefährdung von
Halbleitern bei Hochfrequenzvorgängen,
- – akustische
Störungen
bei Niederfrequenzvorgängen,
- – Erregung
von mechanischen und/oder elektrischen Resonanzen aufgrund von Frequenzabtastung.
-
Es
ist Ziel der vorliegenden Erfindung, diese Nachteile zu überwinden,
und es ist ihre Hauptaufgabe, ein Verfahren und eine Vorrichtung
zum Steuern eines statischen Wandlers bereitzustellen, der die Dynamik von
Direktregelverfahren wie oben beschrieben bewahrt und gleichzeitig
eine Wahl der Kommutationsfrequenz als unabhängigen Parameter erlaubt.
-
Zu
diesem Zweck stellt die Erfindung zunächst ein Verfahren zum Steuern
eines statischen Wandlers in Verbindung mit einer mehrphasigen Stromquelle
und einer Gleichspannungsquelle bereit, wobei das Verfahren dazu
gedacht ist, eine elektrische und/oder magnetische und/oder mechanische
Größe, Regelgröße genannt,
der Stromquelle einzustellen, und dadurch gekennzeichnet ist, dass:
- – Synchronisationszeitpunkte
t(i) erzeugt werden, die durch einen Taktgeber mit Periode T definiert
werden,
- – wenigstens
eine elektrische, magnetische oder mechanische Größe gemessen
wird, die den Zustand der Stromquelle repräsentiert,
- – auf
der Basis der gemessenen Größen wenigstens
eine Regelgröße c(t)
und deren Ableitung ċ(t)
und der Wert cp (t(i)+T) berechnet werden, den jede Regelgröße zum Synchronisationszeitpunkt
gemäß t(i)+T
annehmen wird, für
die Konfiguration Cc des statischen Wandlers zum Zeitpunkt t(i),
- – jede
Regelgröße cp(t(i)+T)
mit einer vorgewählten
Referenzgröße, Einstellgröße genannt,
verglichen wird, und in Abhängigkeit
von den Ergebnissen des Vergleichs und der Konfiguration des statischen
Wandlers zu jedem Synchronisationszeitpunkt t(i) die Konfiguration
des genannten statischen Wandlers bestimmt wird, um es zu ermöglichen,
den Abstand zwischen jeder Regelgröße und der entsprechenden Einstellgröße zum Synchronisationszeitpunkt
gemäß t(i)+T
zu minimieren,
- – die
Ableitung zum Zeitpunkt t(i)+T einer Regelgröße, übergeordnete Größe genannt,
entsprechend der Konfiguration Cc(t(i)+T) zum Zeitpunkt t(i)+T berechnet
wird,
- – der
Kommutationszeitpunkt t(i)+tcom zwischen diesen Zeitpunkten t(i)
und t(i)+T bestimmt wird, zu dem der Abstand zum Zeitpunkt t(i)+T
zwischen der übergeordneten
Regelgröße und der
entsprechenden Einstellgröße minimiert
werden kann,
- – und
die Kommutation des statischen Wandlers zum Zeitpunkt t(i)+tcom
gesteuert wird.
-
Gemäß der Erfindung
ist das Steuerprinzip in drei Schritte unterteilt:
- – Wählen der
Konfiguration des statisches Wandlers zu einem Zeitpunkt t(i)+T
in Abhängigkeit
von der Konfiguration dieses Wandlers zu einem Zeitpunkt t(i) und
Messwerten, die den Zustand der Stromquelle repräsentieren,
- – Errechnen
des Kommutationszeitpunkts t(i)+tcom zwischen aktuellen und zukünftigen
Konfigurationen für eine
bevorzugte Regelgröße, deren
Kommutationsfrequenz geregelt werden soll,
- – Steuern
der Kommutation des statischen Wandlers zum Zeitpunkt t(i)+tcom.
-
Dieses
Steuerverfahren führt
demgemäß zu:
- – Steuern
einer einzelnen Kommutation des statischen Wandlers zwischen zwei
Abtastzeitpunkten t(i), t(i)+T,
- – Festlegen,
zwischen diesen beiden Zeitpunkten und mit Hilfe von Rechenableitungen,
des Kommutationszeitpunktes, um den Abstand zwischen der bevorzugten
Regelgröße und der
entsprechenden vorgewählten
Einstellgröße minimal
zu halten.
-
Ein
solches Steuerverfahren ermöglicht
somit die Zuweisung des/der von der Stromquelle gelieferten Regelgröße(n) auf äußerst dynamische
Weise und die gleichzeitige Wahl der Kommutationsfrequenz des statischen
Wandlers als unabhängigen
Parameter, anstatt sie als Folge der Betriebsbedingungen zu behandeln.
-
Gemäß der Anwendung
ist es dann möglich,
eine feste Frequenz zuzuweisen (um beispielsweise eine elektrische
oder mechanische Filterung mit Hilfe einer äußerst selektiven Bandeliminatorschaltung
zu ermöglichen)
oder die Abschaltfrequenz in Abhängigkeit
von den Lastbedingungen zu variieren (beispielsweise um die Temperatur
von Halbleitern konstant zu halten und um thermische Wechselbeanspruchung
zu reduzieren).
-
Gemäß einer
ersten Anwendung zum Steuern eines Wechselrichters mit N Pegeln,
wobei N ≥ 2
ist, in Verbindung mit einer asynchronen Drehstrommaschine, werden
der Ständerfluss ϕs
und das elektromagnetische Moment Cem der genannten Maschine vorzugsweise
als Regelgröße und das
elektromagnetische Moment Cem als bevorzugte Regelgröße gewählt.
-
Darüber hinaus
und vorteilhafterweise werden zum Berechnen der Regelgrößen ϕs
und Cem die Leitungsströme
I1, I2 und I3 und die Ständerspannungen,
geschäzt
oder gemessen, V1, V2, V3 am Ausgang des Wechselrichters gemessen.
-
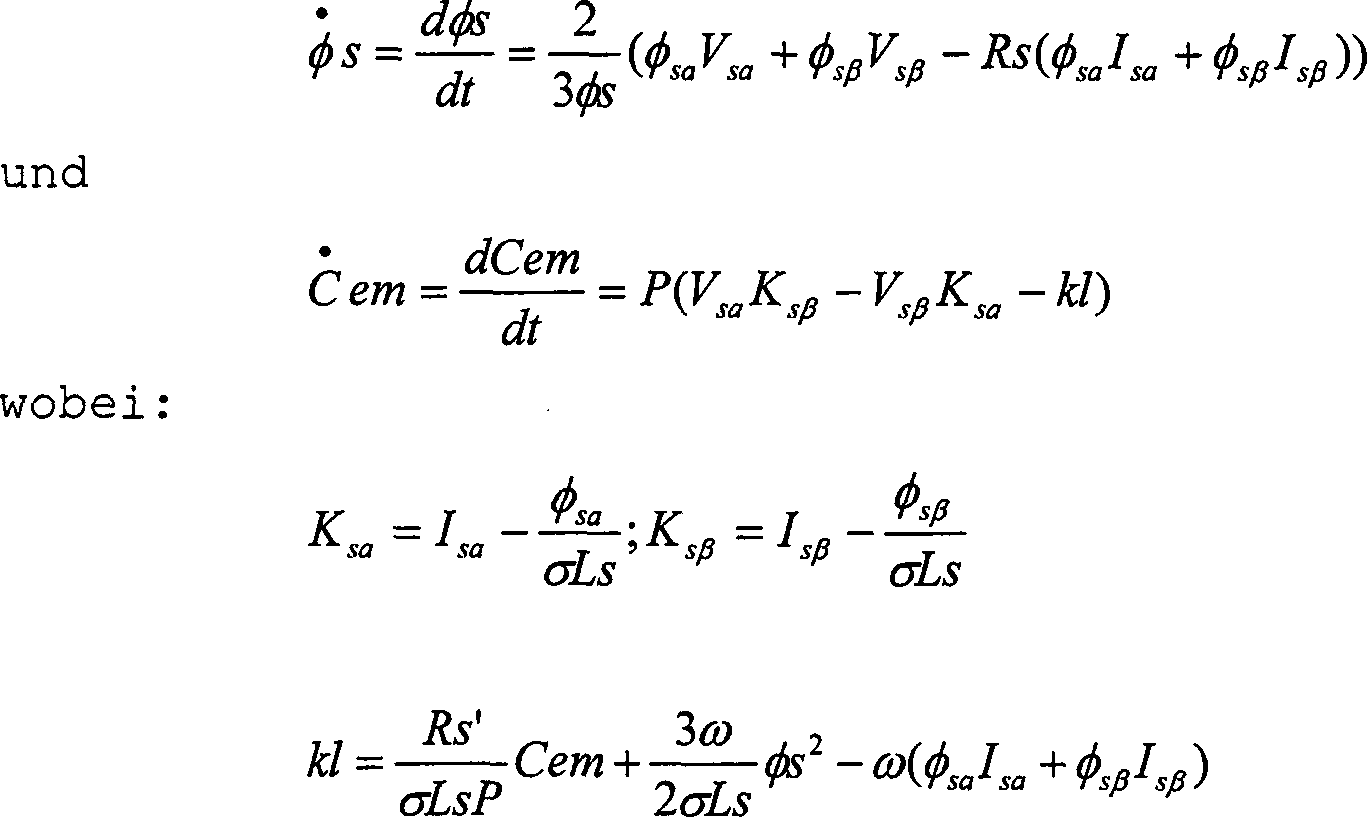
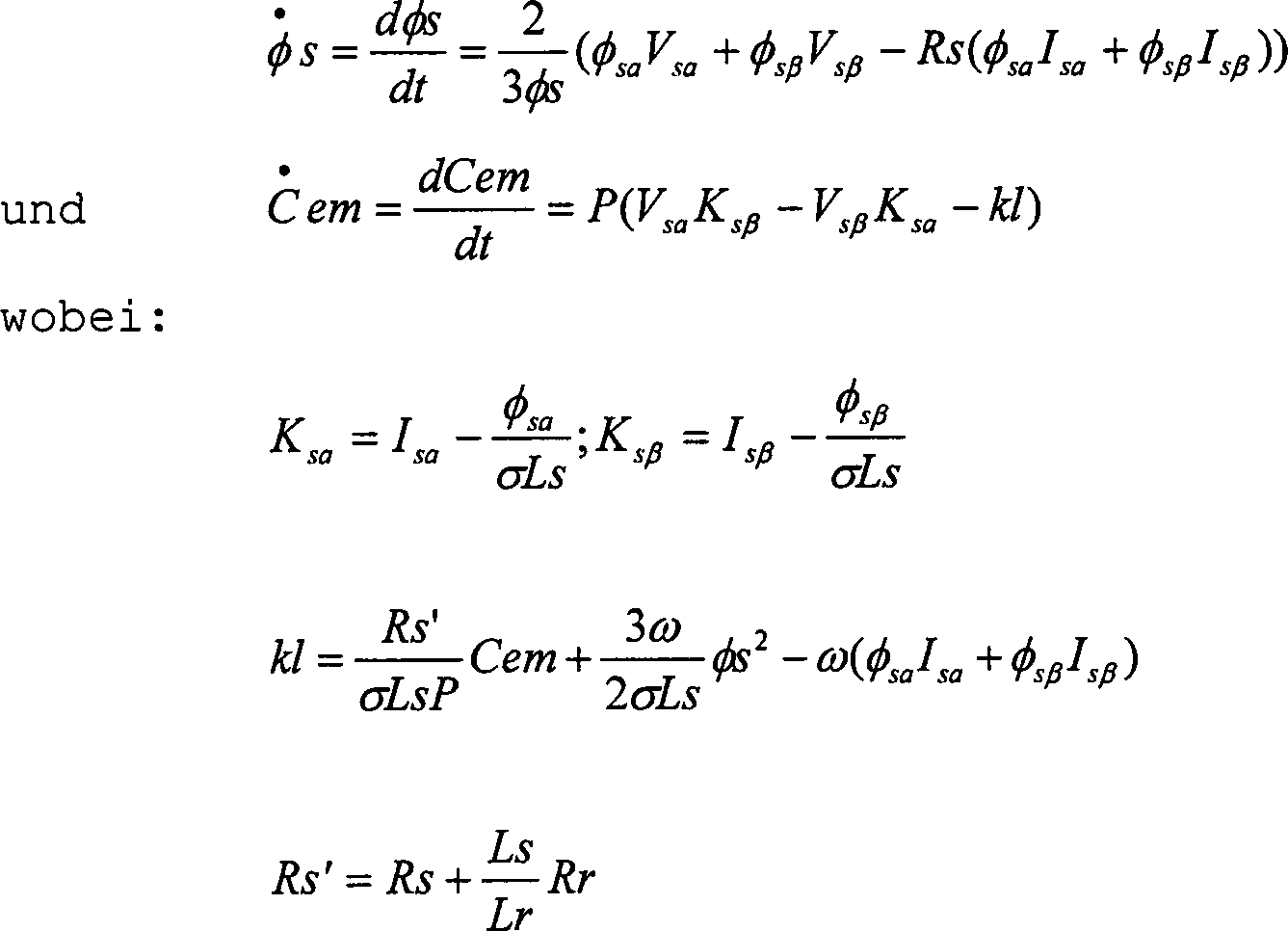
Ferner
werden gemäß dieser
Anwendung vorzugsweise die Ableitungen ϕs und Ċem von Regelgrößen ϕs
und Cem auf der Basis der folgenden Formeln berechnet:
-
In
den Formeln gilt Folgendes:
- Rs =
- Ständerwiderstand
- Rr =
- Läuferwiderstand
- P =
- Anzahl Polpaare
- σ =
- Streufaktor
- Ls und Lr =
- zyklische Ständer- und
Läuferinduktanzen
- ω =
- elektrische Drehzahl
der Maschine 2.
-
Zusätzlich und
vorteilhafterweise wird Folgendes errechnet:
- – die Variation
der Ableitung des Momentes ΔĊem zwischen
den Konfigurationen des Wechselrichters 1 zu den Zeitpunkten
t(i) und t(i)+T gemäß der folgenden
Gleichung: wobei ΔVsα und ΔVsβ Variationen
der Ständerspannungen
zwischen den Zeitpunkten t(i) und t(i)+T entsprechen,
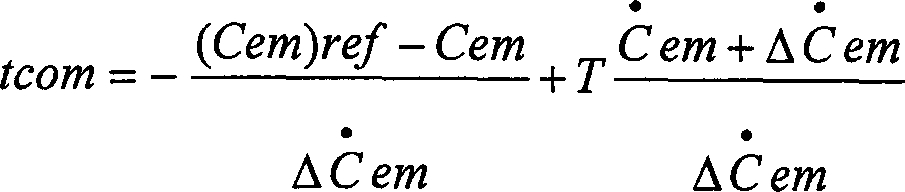
- – der
Kommutationszeitpunkt tcom zwischen t(i) und t(i)+T des Wechselrichters
gemäß der folgenden
Formel:
-
Außerdem werden
gemäß einer
bevorzugten Ausgestaltung, die diese erste Anwendung beinhaltet:
- – auf
der Basis der Konfiguration des Wechselrichters 1 zum Zeitpunkt
t(i), der einer Lokalisierung Qi der Ausgangsspannung in einer Phasenebene αβ entspricht,
die in sechs Winkelsektoren θ1
... θ6
unterteilt ist, die Gefälle
der Regelwerte auf der Basis der Ableitungen ϕ .s und Ċem berechnet,
- – von
dem Wert dieser Gefälle
je nach dem, ob sie erhöht
oder reduziert werden sollen, auf eine solche Weise abgeleitet,
dass der Abstand zwischen jeder Regelgröße und der entsprechenden Referenzgröße zum Zeitpunkt
t(i)+T minimiert wird,
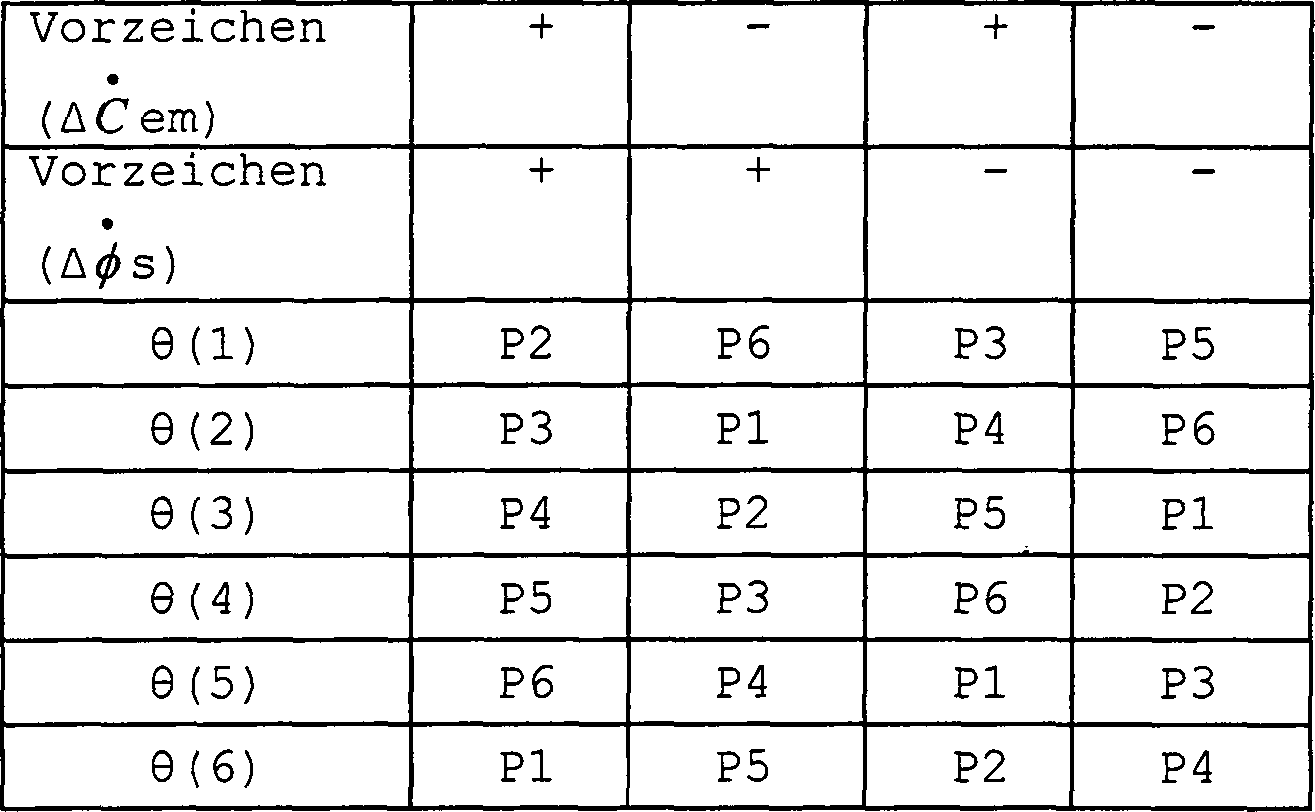
- – der
Punkt PK = Qi + 1, der der Konfiguration des Wechselrichters (1)
zum Zeitpunkt t(i)+T entspricht, mit Hilfe der folgenden Wahrheitstabelle
ermittelt:
-
Gemäß einer
zweiten Anwendung zum Steuern eines Schalters (k) wie z.B. eines
Transistors, in Verbindung mit einer Last RL wie z.B. einem Zweipegel-Zerhacker
und zu jedem Abtastzeitpunkt t(i):
- – werden
die Ableitungen der zu regelnden Größe I zu den Zeitpunkten t(i)
und t(i)+T in Abhängigkeit
vom Zustand des Schalters (k) zum Zeitpunkt t(i) gemäß den folgenden
Formeln errechnet:
• wenn
der Schalter (k) zum Zeitpunkt t(i) leitet: • wenn der Schalter (k) zum
Zeitpunkt t(i) sperrt:
- – und
der Kommutationszeitpunkt t(i)+tcom zwischen t(i) und t(i)+T der
Zustandsänderung
des Schalters (k) wird gemäß den folgenden
Formeln ermittelt:
• wenn
der Schalter (k) zum Zeitpunkt t(i) leitet: • wenn der Schalter (k) zum
Zeitpunkt t(i) sperrt:
-
Die
Erfindung erstreckt sich auch auf eine Steuervorrichtung, die Folgendes
umfasst:
- – einen
Taktgeber mit Periode T zum Erzeugen von Synchronisationszeiten
t(i),
- – ein
Rechenmodul zum Berechnen zu jedem Zeitpunkt t(i):
• auf der
Basis von wenigstens einer gemessenen Größe, die für den Zustand der Stromquelle
repräsentativ ist,
wenigstens einer Regelgröße c(t)
und ihrer Ableitung ċ(t),
• auf der
Basis jeder Regelgröße c(t)
und ihrer Ableitung ċ(t)
und durch Vergleichen mit einer vorgewählten Referenzgröße, Ermitteln
der Konfiguration des statischen Wandlers, um eine Minimierung des
Abstands zwischen jeder Regelgröße und der
entsprechenden Referenzgröße zum Zeitpunkt
t(i)+T zu erzielen,
• die
Variation der Ableitung von einer der Regelgrößen, übergeordnet genannt, zwischen
den Konfigurationen des jeweiligen statischen Wandlers zu den Zeitpunkten
t(i) und t(i)+T,
- – eine
Recheneinheit des Kommutationszeitpunkts t(i)+tcom zwischen t(i)
und t(i)+T, damit der Abstand zum Zeitpunkt t(i)+T zwischen dem übergeordneten
Regelwert und dem assoziierten Referenzwert minimiert werden kann,
- – und
eine Einheit zum Steuern der Kommutation des statischen Wandlers
zum Zeitpunkt t(i)+tcom.
-
Weitere
Eigenschaften, Aufgaben und Vorteile der Erfindung gehen aus der
nachfolgenden ausführlichen
Beschreibung mit Bezug auf die Begleitzeichnungen hervor, die als
nicht begrenzendes Beispiel eine Vorrichtung gemäß der Erfindung mit allgemeiner
Anwendung und zwei bevorzugte Anwendungstypen des erfindungsgemäßen Verfahrens
darstellt. In diesen Zeichnungen, die integraler Bestandteil der
vorliegenden Erfindung sind, zeigt:
-
1 eine
allgemeine Gesamtübersicht über die
Vorrichtung gemäß der Erfindung,
angewendet auf die Steuerung einer Stromquelle,
-
2a bis 2e grafische
Darstellungen, die das Steuerprinzip illustrieren, das gemäß dem erfindungsgemäßen Verfahren
zum Einsatz kommt,
-
3 einen
Schaltplan, der einen Zwei-Pegel-Zerhacker
repräsentiert,
mit Speisung auf Last (R,L),
-
4 einen
Graph, der das Ansprechverhalten des Stroms repräsentiert, der am Ausgang vom
Zerhacker gemäß dem Steuerverfahren
gemäß der Erfindung
erhalten wird,
-
5 ein
Gesamtdiagramm einer Vorrichtung gemäß der Erfindung, die auf die
Steuerung einer asynchronen Drehstrommaschine angewendet wird,
-
6 eine
Darstellung der Winkelsektoren zum Ermitteln der Position des Flusses
dieser asynchronen Maschine,
-
7a und 7b Darstellungen
von Spannungsvektoren, die jeweils mit einem Drehstromwechselrichter
mit zwei Pegeln und einem Drehstromwechselrichter mit drei Pegeln
erhalten werden können,
-
8 eine
Auswahltabelle für
die Erzeugung von Steuersignalen,
-
9 ein
Diagramm, das die Auswahlstrategie illustriert, die zum Verwenden
der Auswahltabelle von 8 nötig ist,
-
und 10 eine
grafische Darstellung eines Beispiels für die Bahn des Spannungsvektors
gemäß einem Übergangsschema.
-
Die
Vorrichtung gemäß der Erfindung,
von der 1 auf allgemeine Weise ein Blockdiagramm
zeigt, ist so ausgelegt, dass eine Regelgröße einer Stromquelle 2,
die von einem statischen Wandler 1 kommt, justiert werden
kann, und zwar mit einem hohen dynamischen Ansprechverhalten und
unter Zuweisung der Schaltfrequenz des genannten statischen Wandlers.
-
Zu
diesem Zweck umfasst die Vorrichtung eine Steuereinheit 3,
die zunächst
ein Rechenmodul 4 beinhaltet, das wie folgt programmiert
ist:
- – Errechnen
von wenigstens einem Messwert, der für den Zustand der Stromquelle 2 repräsentativ
ist:
• eine
Regelgröße c(t)
und deren Ableitung ċ(t)
zum Abtastzeitpunkt t(i),
• das
Gefälle ċ(t(i)+T)
dieser Regelgröße c(t)
zum Zeitpunkt t(i)+T, so dass der Abstand zwischen Letzterer und
einem vorbestimmten Referenzwert cref minimal gehalten werden kann,
- – Anlegen
von zwei Signalen, die jeweils Werte von ċ(t(i)) und Δċ(t(i)) = ċ(t(i)+T) – ċ(t(i)) repräsentieren.
-
Diese
Steuereinheit 3 beinhaltet darüber hinaus eine Einheit 5 zum
Errechnen des Zeitpunkts t(i)+tcom zwischen t(i) und t(i)+T, so
dass der Referenzwert cref zum Zeitpunkt t(i)+T erhalten oder näherungsweise
erhalten werden kann.
-
Diese
Steuereinheit 3 beinhaltet schließlich ein Steuermodul 6,
das so gestaltet ist, dass es die neue folgende Konfiguration des
statischen Wandlers 1 zum Zeitpunkt t(i)+tcom zuweist,
geregelt durch einen Impulsgenerator 7, der die Betriebsfrequenz
bestimmt.
-
Das
Funktionsprinzip dieser Vorrichtung ist in den 2a bis 2e illustriert
und besteht somit im Unterteilen der Zeit in gleiche Abschaltintervalle
von Dauer T und der Durchführung
von höchstens
einer Kommutation des statischen Wandlers 1 in jeder Periode.
-
Eine
solche Vorrichtung kann, beispielsweise und an erster Stelle, auf
die Regelung des Ausgangsstroms von einem standardmäßigen Zerhacker
wie dem angewendet werden, der in 3 dargestellt
ist.
-
Zu
diesem Zweck wird gemäß dem oben
beschriebenen Grundsatz zu jedem Abtastzeitpunkt ein Ausgangsstrom
zugewiesen, der gleich einem Referenzstrom ist, zusätzlich erfolgt
eine einzelne Kommutation des Zerhackers zwischen zwei Abtastzeitpunkten.
-
Zu
jedem Abtastzeitpunkt t(i) wird somit der Zeitpunkt t(i)+tcom errechnet,
an dem die nachfolgende Kommutation stattfindet, um zum Zeitpunkt
t(i)+T einen Strom zu erhalten, der gleich dem Referenzstrom ist. Dies
ergibt:
I(t(i)) + İ(t(i))·tcom + İ(t(i) + T)·(T – tcom) = Irefwas Folgendes
ergibt:
-
Bei
diesem Steuermodus müssen
somit Ableitungen des zu regelnden Wertes errechnet werden, und zwischen
zwei Fällen
unterschieden werden:
- 1) wenn der Transistor
K zum Abtastzeitpunkt leitet: und demzufolge, wenn er nicht
leitet:
- 2) wenn der Transistor zum Abtastzeitpunkt sperrt: und demzufolge wird aktiviert
bei:
-
Das
Ergebnis dieser Regelung ist in 4 illustriert,
die den Ausgangsstrom vom Zerhacker repräsentiert, der für einen
bestimmten Wert Iref um diesen Wert oszilliert und in einem kontinuierlichen
Schema zu jedem Abtastzeitpunkt gleich dem Letzteren wird.
-
Die
erfindungsgemäße Vorrichtung
gemäß 5 ist
so gestaltet, dass sie das Drehmoment einer Asynchronmaschine 2 direkt
regelt, die von einem statischen Wandler 1 gespeist wird.
Diese Vorrichtung ermöglicht
die Zuweisung des von der Maschine 2 kommenden Drehmomentes
mit einem hohen dynamischen Ansprechverhalten, gleichzeitig wird
die Schaltfrequenz des statischen Wandlers 1 angewendet.
-
Gemäß dieser
Anwendung beinhaltet das Rechenmodul 4 der Steuereinheit 3 grundsätzlich Folgendes:
- – ein
Modul 4a zum Schätzen
des zu regelnden Wertes von Drehmoment und Fluss und deren Ableitungen,
- – ein
Rechenmodul 4b in Verbindung mit einer in 8 gezeigten
Tabelle, so dass die folgende Konfiguration des Wandlers 1 gewählt werden
kann,
- – ein
Modul 4c zum Vorhersagen der Variation der Ableitung des
Drehmoments ΔĊem zwischen
aktuellen und nachfolgenden Konfigurationen.
-
Diese
Steuereinheit 3 beinhaltet zusätzlich Folgendes:
- – Modul
5 zum Errechnen des Zeitpunkts t(i)+tcom zum Übergehen von einer Wechselrichterkonfiguration Cc(t(i))
zur nachfolgenden Konfiguration Cc(t(i)+T),
- – und
Modul 6, das zum Zuweisen der Wechselrichterkonfiguration
Cc(t(i)+T) zum Zeitpunkt T(i)+tcom nach der Stromtaktspitze ausgelegt
ist, die vom Impulsgenerator 7 geliefert wird.
-
Gemäß dieser
Steuervorrichtung wird das Steuerprinzip in drei Hauptschritte unterteilt:
- – Ermitteln,
mit Hilfe des Rechenmoduls 4a, der zukünftigen Wechselrichterkonfiguration
Cc(t(i)+T) anhand der derzeitigen Konfiguration Cc(t(i)) und der
erhaltenen Messwerte,
- – Berechnen,
mit Modul 5, des Kommutationszeitpunkts t(i)+tcom zwischen
aktuellen und zukünftigen
Konfigurationen für
eine bevorzugte Regelgröße, deren
Schaltfrequenz geregelt werden soll, im Falle des Drehmoments Cem
der Maschine 2,
- – Zuweisen,
mit Modul 6, der neuen Konfiguration Cc(t(i)+T) zum gewünschten
Zeitpunkt.
-
Jeder
dieser Schritte wird nachfolgend ausführlich durch Analysieren der
Funktionen jedes Moduls und der Module 4a-4c, 5, 6 beschrieben.
-
Das
erste Modul 4a wird anhand von Messungen der Leitungsströme I1, I2,
I3 und der geschätzten oder
gemessenen Ständerspannungen
V1, V2, V3 am Ausgang vom Wechselrichter 1 ausgelegt, um
anhand des Modells der Asynchronmaschine 2 die Regelgrößen, d.h.
das elektromagnetische Drehmoment Cem und den Ständerfluss ϕs sowie
deren Ableitungen wiederherzustellen.
-
Diese
Größen von
Fluss und Drehmoment werden auf konventionelle Weise dadurch erhalten,
dass sie in einen festen Referenzwert αβ in Verbindung mit dem Ständer der
Maschine 2 eingesetzt und Isα, Isβ,
Vsα und
Vsβ anhand
von Dreiphasen/Zweiphasen-Transformationen mit konstanter Leistung
auf den Achsen αβ durchgeführt werden.
-
Die
Errechnung des Ständerflusses
kann somit beispielsweise anhand der Ständergleichungen der Maschine
2 mit
Hilfe der folgenden Gleichungen erhalten werden:
-
In
Bezug auf das elektromagnetische Drehmoment der Maschine 2 wird
dies anhand der Werte ϕsα und ϕsβ und
anhand der Messwerte der Leitungsströme mit der folgenden Gleichung
errechnet: Cem = P(ϕsα Isβ – ϕsβ Isα
-
Anhand
dieser Gleichungen werden die Werte der Ableitungen von Fluss und
Drehmoment mit den folgenden Formeln erhalten:
wobei
in den Formeln Folgendes gilt:
- Rs =
- Ständerwiderstand
- Rr =
- Läuferwiderstand
- P =
- Anzahl Polpaare
- σ =
- Streufaktor
- Ls und Lr =
- zyklische Ständer- und
Läuferinduktanzen
- ω =
- elektrische Drehzahl
der Maschine 2.
-
Die
Regelung dieser Größen erfolgt
mit einer konventionellen "DTC"-Technik (direkte
Drehmomentregelung), die direkt von der Position des Ständerflusses
in der Phasenebene αβ abhängig ist.
Wie in 6 illustriert, wird diese Ebene αβ in sechs
Winkelsektoren θ1....θ6 unterteilt.
Gemäß dieser
Unterteilung haben die Regelgrößen eine
konstante Richtungsänderung
innerhalb eines bestimmten Winkelsektors für eine gewählte Wechselrichterkonfiguration,
und die Spannungsvektoren, die mit den Wechselrichtern mit zwei
und drei Pegeln erhalten werden können, sind beispielhafterweise
in 7a und 7b dargestellt.
-
Die
Konfiguration des Wechselrichters 1 entspricht jedoch den
Logikordnungen, die jedem Schalter zugeordnet sind, und der genannte
Wechselrichter kann eine beliebige Zahl von Kommutationszellen in
Serie haben (p = N – 1).
Die Ausgangsspannungsvektoren können
auf diese Weise eine Gruppe von Punkten erreichen, die in einem
Sechseck in der Phasenebene stehen, wie in 10 illustriert
ist, und die die Bahn des Spannungsvektors während eines Übergangsschemas
repräsentieren.
-
Das
Rechenmodul 4b ist so gestaltet, dass es anhand der Regelgrößen zum
Zeitpunkt (t(i)) diese Regelgrößen zum
Abtastzeitpunkt (t(i)+T) errechnet.
-
Zu
diesem Zweck, und an erster Stelle, ist dieses Rechenmodul 4b anhand
der Konfiguration des Wechselrichters 1 zu einem Zeitpunkt
t(i) entsprechend einer Lokalisierung Qi der Ausgangsspannung in
der Phasenebene adaptiert, um das Gefälle der Regelgrößen von
den Werten ϕ .s und Ċem
zu errechnen, die von Modul 4a kommen.
-
Die
Werte dieser Gefälle
ermöglichen
die Vorhersage, ob die Konfiguration zum Zeitpunkt t(i) die Regelgrößen über oder
unter die Referenzwerte führt.
In Anbetracht der Kenntnis, dass es das Ziel ist, einen Null-Fehler
zwischen den Regelgrößen und
den Referenzwerten zum Zeitpunkt t(i)+T zu erzielen, wird das Rechenmodul 4b dann
so adaptiert, dass definiert wird, ob diese Gefälle erhöht (+) oder verringert (-)
werden sollen.
-
Diese
Wahl, die aus dem Wählen
einer Erhöhung
oder Reduzierung des Gefälles
des Drehmoments besteht, ist in 9 illustriert,
wo die Werte des Referenzdrehmoments (Cem)ref sowie die verschiedenen
Gefälle Ċem zum Zeitpunkt
t(i) dargestellt sind.
-
Anhand
dieser Ermittlung und auf der Basis der Kenntnis des Winkelsektors θ(k), wo
sich der Fluss befindet, geliefert von Modul 4a, wird das
Rechenmodul 4b mit Hilfe einer in 8 gezeigten
Wahrheitstabelle so ausgelegt, dass es den Punkt Qi + 1 = PK ermittelt,
der der Konfiguration des Wechselrichters zum Zeitpunkt t(i)+T entspricht.
Wie in 10 gezeigt, ist dieser Punkt
Qi + 1 einer von sechs Punkten des peripheren Sechsecks bei Qi.
-
Modul
4c ist
so gestaltet, dass es die Variation der Ableitung des Drehmoments ΔĊem zwischen
den Konfigurationen des Wechselrichters
1 zu den Zeitpunkten
t(i) und t(i)+T errechnet. Diese Berechnung erfolgt mit Hilfe der
folgenden Gleichung:
-
ΔVsα und ΔVsβ entsprechen
Variationen in den Ständerspannungen
von einer Konfiguration des Wechselrichters zum Zeitpunkt t(i) zu
der zum Zeitpunkt t(i)+T.
-
Schließlich basiert
die Berechnung des Kommutationszeitpunktes t(i)+tcom des Wechselrichters, durchgeführt auf
der Ebene des Moduls
5, auf der folgenden Gleichung:
-
Die
Hauptaufgabe der oben beschriebenen Regelstrategie besteht somit
in der Zuweisung der Kommutationsfrequenz, während diese als unabhängiger Parameter
gewählt
und nicht mehr als eine Folge der Betriebsbedingungen behandelt
wird.
-
Zu
diesem Zweck wird die Zeit in gleiche Abschaltperioden mit Dauer
T unterteilt und es wird wie in 10 gezeigt
gewährleistet,
dass während
jeder Periode T eine einzige Verschiebung von einem Punkt, der mit
dem Wechselrichter 1 erhalten werden kann, zu einem anderen
Nachbarpunkt erfolgt.
-
Dazu
müssen,
unter Berücksichtigung
der Tatsache, dass zum Abschaltzeitpunkt der entsprechende Vektor
am Punkt Qi in der vorherigen Periode gewählt wurde, zwei Probleme gelöst werden:
- 1) Auswahl des Punktes PK aus sechs Punkten
um Qi (P1 bis P6), für
den kommutiert werden muss und der in der nachfolgenden Abschaltperiode
den Punkt darstellt, der mit dem mittleren Punkt (Qi+1) zusammenfällt,
- 2) Ermitteln des Zeitpunkts t(i)+tcom innerhalb des Intervalls
[t(i), t(i)+T], zu dem der Übergang
von Qi zu Qi+1=PK gemacht werden muss.
-
Um
das erste Problem zu lösen,
wird die Tabelle von 8 verwendet, die uns für jeden
Sektor Θ den Punkt
PK gibt, der die folgenden Vorzeichen geben kann: ΔĊem = Ċem(t{i)
+ T) – Ċem(t(i))
und Δϕ .s = ϕ .s(t(i)
+ T) – ϕ .s(t(i)).
-
Erinnern
wir uns, dass die Strategie zum Wählen des Vorzeichens (ΔĊem) und
ebenso des Vorzeichens (Δϕ .s),
das zum Verwenden der Tabelle von 8 notwendig
ist, in 9 dargestellt ist.
-
Um
das zweite Problem zu lösen,
wird der Kommutationszeitpunkt t(i)+tcom errechnet, mit dem ein Null-Fehler
für das
Drehmoment in Bezug auf einen Referenzdrehmomentwert Cemref zu jedem
Abschaltzeitpunkt erhalten werden kann.
-
Demgemäß kann der
Algorithmus, der diesem Regelgesetz mit einer festen Frequenz entspricht,
die folgende Form erhalten. Zu jedem Zeitpunkt t(i) sollte Folgendes
durchgeführt
werden:
- 1) Errechnen von
- 2) Wählen
des Zeitpunkts PK anhand der Tabelle von 8,
- 3) Errechnen von ΔĊem entsprechend
der Passage Qi zu PK,
- 4) Errechnen des Umschaltzeitpunkts t(i)+tcom.














 wobei in den Formeln Folgendes gilt: Rs = Ständerwiderstand Rr = Läuferwiderstand P = Anzahl Polpaare σ = Streufaktor Ls und Lr = zyklische Ständer- und Läuferinduktanzen ω = elektrische Drehzahl der Maschine
wobei in den Formeln Folgendes gilt: Rs = Ständerwiderstand Rr = Läuferwiderstand P = Anzahl Polpaare σ = Streufaktor Ls und Lr = zyklische Ständer- und Läuferinduktanzen ω = elektrische Drehzahl der Maschine



 – und der Kommutationszeitpunkt t(i)+tcom zwischen t(i) und t(i)+T der Zustandsänderung des Unterbrechers (k) gemäß den folgenden Formeln ermittelt wird: • wenn der Unterbrecher (k) zum Zeitpunkt t(i) leitet
– und der Kommutationszeitpunkt t(i)+tcom zwischen t(i) und t(i)+T der Zustandsänderung des Unterbrechers (k) gemäß den folgenden Formeln ermittelt wird: • wenn der Unterbrecher (k) zum Zeitpunkt t(i) leitet • wenn der Unterbrecher (k) zum Zeitpunkt t(i) sperrt:
• wenn der Unterbrecher (k) zum Zeitpunkt t(i) sperrt:

