-
Einsatzgebiet und technischer Hintergrund
-
Die Erfindung betrifft die fotografische und geometrische Aufnahme von Objekten im Raum, unabhängig vom Vorhandensein einer Allgemeinbeleuchtung, also auch im Dunkeln. Im Unterschied zu bekannten Verfahren der fotografischen Beleuchtungstechnik, z. B. Blitzleuchten, sollen große Objektabstände bei vergleichsweise geringen Lichtleistungen ermöglicht werden. Je nach Ausstattung soll es möglich sein, neben fotografischen Informationen auch Raumkoordinaten zu gewinnen und einen unbegrenzten Bilderfassungswinkel zu erreichen.
-
Stand der Technik
-
Der relevante Stand der Technik wird von den Einzellösungen unterschiedlicher Teilaufgaben repräsentiert, nämlich:
- – der Beleuchtungstechnik für fotografische Bildaufnahmen,
- – der direkten Erfassung von Objektkoordinaten im Raum und
- – der Überwindung von Bildwinkelgrenzen ohne die Einschränkung der Ortsauflösung im Objekt.
-
Für die Beleuchtung von Objekten sind Fotolampen gebräuchlich, die als Blitzlampen z. T. im Impulsbetrieb arbeiten und je nach gewünschtem Aufnahmewinkel auch eine Richtcharakteristik besitzen, die durch geeignete Reflektoren oder Linsen erreicht wird. Um bei großen Objektentfernungen genügend ausleuchten zu können, muss der Abstrahlwinkel möglichst klein und die Lichtleistung ausreichend groß sein.
-
Eine andere Lösung wird mit der Offenlegungsschrift
DE 10 2012 020 922 A1 vorgeschlagen, bei der als Lichtquelle eine Laserquelle zum Einsatz kommt, die multispektrales gebündeltes Licht aussendet. Die kleine Strahl-Divergenz von Laserquellen führt dabei zu einer großen Reichweite. Die flächige Bildprojektion wird dadurch erreicht, dass ein bewegliches Ablenksystem, z. B. ein Drehspiegel, zeitlich gestaffelt unterschiedliche Einfallswinkel überstreicht und somit Strahlenbündel erzeugt. Wegen der punktweisen Abtastung erfordert die Bilderzeugung eine verhältnismäßig lange Aufnahmezeit. In der Zusatzanmeldung
DE 10 2014 005 514 A1 wird diese Zeit durch Verwendung flächige Bildempfänger reduziert.
-
Für die Gewinnung von Raumkoordinaten-Tabellen, so genannten Punktwolken, sind Laserscanner bekannt, die mit modulierten, bzw. gepulsten Laserlichtquellen arbeiten und über die Phase oder Laufzeit des vom Objekt reflektierten Lichtes die Entfernung messen. Durch kontrolliertes Drehen des Messstrahls, meist mittels Spiegel oder Prisma in zwei zueinander rechtwinkligen Drehachsen, werden in schneller Folge Polarkoordinaten rund um den Beobachtungspunkt aufgezeichnet. Dabei bildet jeder aufgezeichnete Punkt einen Datensatz aus Horizontal- und Vertikalwinkel, sowie dessen Abstand zum Beobachtungspunkt. Jedem der so vermessenen Punkte werden also sofort die kompletten Koordinaten im Raum zugeordnet.
-
Neben Laserscannern, die auf die mechanische Strahlablenkung angewiesen sind, sind so genannte Time-of-Flight-Kameras (ToF-Kameras) unter Verwendung von Fotomischdetektoren (Photonic Mixing Device – PMD) bekannt, die sich von herkömmlichen Matrixkameras für die Bildaufnahme dadurch unterscheiden, dass sie erstens für jeden Bildpunkt-Sensor eine eigene Mischer-Funktion mit Ladevorgängen zur Detektierung der Signalphase unmittelbar in der Sensormatrix realisieren und zweitens die aufzunehmenden Objekte mit moduliertem Licht bestrahlen, dessen Modulation in fester Synchronität zum Mischer steht. Eine zusammengefasste Darstellung zur Wirkungsweise solcher TOF-Kameras mit zahlreichen weiteren Literaturverweisen findet sich u. a. in [Hansard, M et al.: Time-of-Flight Cameras – Principles, Methods and Applications. Springer Briefs In Computer Science (hal-00725654, version 1–7 Dec 2012)]. Auf diese Weise lassen sich Objektkoordinaten im Bildfeld bestimmen, ohne eine mechanisch betriebene optische Ablenkvorrichtung zu benötigen. Die Struktur solcher Kameras ermöglicht den Aufbau sehr preisgünstiger Systeme. Auch ein Remissionsbild im schmalen Wellenlängenbereich der Lichtquellen, meist im bevorzugten unsichtbaren nahen Infrarot, lässt sich mit einer TOF-Kamera gewinnen. Die meist verwendeten Bildwinkel liegen ähnlich zu denen herkömmlicher Bildaufnahmekameras, also beispielsweise im bevorzugten Bereich von etwa 25° bis 90°, so dass auch die modulierte Lichtquelle einen entsprechend großen Abstrahlwinkel benötigt. Das führt wiederum dazu. dass in der Praxis nur vergleichsweise kurze Objektabstände erreichbar sind. Auch die Ortsauflösung ist wegen einer unumgänglichen Mindestfläche der Pixelelemente, bezogen auf einen sinnvollen Aufnahmewinkel, sehr begrenzt. Eine wirkliche Alternative zu Laserscannern stellen TOF-Kameras in ihren bekannten Formen deshalb vorerst nicht dar.
-
Weitere Verfahren zur Erfassung von Objektkoordinaten im Raum, insbesondere auf dem Prinzip der räumlichen Triangulation beruhende, sind vom Erfindungsgegenstand weiter entfernt und sollen hier nicht näher diskutiert werden.
-
Für die Überwindung von Bildwinkelgrenzen ohne die Einschränkung der Ortsauflösung im Objekt sind im Wesentlichen drei Verfahren der Panorama- oder Gigapixelfotografie bekannt:
- – Panorama-Kamera nach dem Prinzip der rotierenden Zeilenkamera gemäß DE 44 28 055 A1 ,
- – Segmentierte Bildaufnahme mit planar abbildender Kamera in aufeinander folgenden Einzelaufnahmen aus unterschiedlichen Winkeln und anschließender Montage der transformierten Einzelbilder, z. B. gemäß DE 103 41 822 A1 ,
- – Punktscanner nach DE 197 46 319 A1 .
-
Allen Verfahren ist gemeinsam, dass, wie allgemein in der Fotografie üblich, eine Objektbeleuchtung erforderlich ist. Im einfachsten Fall wird die Beleuchtung vom Tageslicht oder von Kunstlicht bereitgestellt. Für die Panorama-Aufnahme mit ihren unbegrenzten Aufnahmewinkeln sind für die künstliche Objektausleuchtung besonders aufwändige Maßnahmen nötig. Beispielhaft sei auf das Gebrauchsmuster
DE 202 08 555 verwiesen. Allen bekannten Lösungen ist gemeinsam, dass die Beleuchtungsstärke mit zunehmenden Objektabstand exponentiell sinkt und deshalb vorrangig nur im Nahbereich gearbeitet werden kann. Zwischen näheren und entfernteren Objekten im Bildbereich entsteht eine schwer beherrschbare Helligkeitsdynamik.
-
Zur praktischen Anwendung der aus den Objektkoordinaten gewonnenen Punktwolken gehört es inzwischen, den einzelnen Messpunkten ihre natürliche Farbe zuzuordnen, um sie beispielsweise für räumliche Visualisierungen einsetzen zu können. Das zusätzlich aufgezeichnete Reflexionsverhalten der Objektoberfläche für die Wellenlänge des Lasers als Remissionsbild ist dafür kaum geeignet, weil es nur eine orthochromatische Fotografie darstellt. Deshalb werden parallel zu den Punktwolken der Laserscanner zusätzlich Bilddaten gewonnen und koordinatenrichtig, jedoch nicht ohne verbleibende Fehler bei der Passgenauigkeit, den vermessenen Punkten überlagert. Auch mit diesem Aufnahmeverfahren besteht aber weiterhin das gleiche Beleuchtungs-Problem, wie bereits oben beschrieben.
-
Für die Gesamtlösung aller genannten Probleme ist die bereits erwähnte Anordnung nach
DE 10 2012 020 922 A1 und
DE 10 2014 005 514 A1 bekannt, bei der als Lichtquelle Laserquellen zum Einsatz kommen, die multispektrales gebündeltes Licht aussenden. Das optische Empfangsteil besteht aus Einzelkanälen, deren spektrale Einzel-Empfindlichkeiten selektiv an die Einzelspektren der Laserlichtquelle angeglichen sind. Dabei kann pro Spektralbereich ein Einzelelement oder eine Sensormatrix zum Einsatz kommen. Zur Ablenkung des unmittelbaren Aufnahmebereichs, der auf nur einen eng fokussierten Spot oder auf eine Abbildungsmatrix mit kleinem Einfallswinkel beschränkt ist, wird typischerweise ein beweglicher Ablenkspiegel eingesetzt, um letztendlich eine Objekterfassung bei unbegrenztem Aufnahmewinkel zu erreichen. Ein Nachteil dieser Anordnung besteht einerseits in der Notwendigkeit eines schnell drehenden mechanischen Antriebs für den Spiegel, andererseits darin, dass im Falle des Einsatzes einer Sensormatrix ein ständiges Neuzuordnen der Sensorelemente zu den Winkelkoordinaten der Aufnahmeanordnung in Synchronität mit der Ablenkbewegung erfolgen muss. Auch ist das Erfassen kleinerer Aufnahmewinkel ineffizient, weil zumindest in einer Achse entweder größere Abtastlücken einer kontinuierlichen Drehbewegung auftreten, oder die Abtastbewegung diskontinuierlich mit ständigen Beschleunigungs- und Abbremsvorgängen ablaufen müsste. Nicht zuletzt haftet einem optischen Ablenksystem stets der Nachteil an, dass es als zusätzliches Element die Zuverlässigkeit des Gesamtsystems einschränkt, anfällig gegen Verschmutzungen und andere Umwelteinflüsse ist, die spektrale Abbildungscharakteristik beeinflusst und zusätzliches Volumen und zusätzliche Masse einträgt.
-
Technische Aufgahenstellung
-
Der Erfindung liegt die technische Aufgabe zugrunde, fotografische und geometrische Aufnahme von Objekten im Raum, unabhängig vom Vorhandensein einer Allgemeinbeleuchtung, also auch im Dunkeln, fertigen zu können und dabei große Objektabstände bei vergleichsweise geringen Lichtleistungen zu ermöglichen. Je nach Ausstattung soll es möglich sein, neben fotografischen Informationen auch dreidimensionale Objektkoordinaten zu gewinnen und bei hoher Ortsauflösung einen unbegrenzten Bilderfassungswinkel zu erreichen. Auf ein mechanisch betriebenes optisches Ablenksystem im Strahlengang soll gänzlich verzichtet werden.
-
Problemlösung, Beschreibung der Erfindung
-
Das Problem wird mit der im Hauptanspruch gekennzeichneten Erfindung gelöst. Vorteilhafte Ausgestaltungen sind in den weiteren Ansprüchen angegeben.
-
Die Erfindung beruht auf der Grundidee, dass die spektrale Remissionscharakteristik von natürlichen Körpern in den allermeisten Fällen ein stetiges Verhalten ohne Sprünge oder sonstige scharf begrenzte Unregelmäßigkeiten aufweist. Seit langer Zeit werden bei allen bekannten Formen der Farbbildwiedergabe, z. B. bei Bildschirmen oder in Druckmedien, mit wenigen diskreten additiven oder subtraktiven Farben wie Rot, Grün, Blau oder Cyan, Magenta, Gelb Farbbilder reproduziert, wobei ein weitgehend natürliches Farbempfinden erreicht wird. Ebenso ist es also auch bei der Bildaufnahme möglich, die Objekte nicht mit breitbandigem, z. B. weißem, Licht zu beleuchten, sondern nur einige wenige sehr schmalbandige, bzw. sogar monochromatische Einzelspektren zu benutzen. Hierzu eignen sich ebenfalls die bekannten additiven Grundfarben Rot, Grün, Blau, bei Bedarf ergänzt durch weitere „Stützfarben”. Dies führt zu zwei wesentlichen Vorteilen:
- 1) Es lassen sich sehr effiziente, hervorragend modulierbare und fokussierbare Lichtquellen verwenden, insbesondere Laser- oder Lichtemitterdioden (LEDs).
- 2) Während normales Fremdlicht, also Tageslicht oder Kunstlicht, ein breites Spektrum aufweist und somit die Lichtleistung auf einen breiten Wellenlängenbereich verteilt, konzentriert sich bei einer schmalbandigen Lichtquelle die gesamte Lichtleistung auf diesen kleinen Spektralbereich. In der Praxis liefert die Lichtquelle das vom Objekt reflektierte Nutzsignal, während das Fremdlicht als Rauschen zu betrachten ist. Wird nun ein optisches Bandfilter mit einem schmalen Durchlassbereich, der mit dem Spektralbereich der Lichtquelle übereinstimmt, in den Strahlengang einer Aufnahmekamera gebracht, so erreicht man eine deutliche Verbesserung des Signal-Rausch-Verhältnis, weil das Nutzsignal weitgehend ungeschwächt mit seiner gesamten Leistung das Filter passiert, während nur der kleine Anteil der Rauschleistung verbleibt, der in den Durchlassbereich hineinfällt.
-
Der beschriebenen Grundidee folgend enthält eine typische erfindungsgemäße Anordnung also mehrere gebündelte Lichtquellen mit unterschiedlich gelagerten schmalen Spektralbereichen, die mit einem Modulator verbunden sind. Weiter enthält die erfindungsgemäße Anordnung wenigstens einen Bildempfänger, der in bekannter Weise aus einem Aufnahmeobjektiv und einem, im Allgemeinen flächigen, meist matrixförmigen, Bildsensor besteht.
-
Gelingt es weiterhin, die Modulationsbandbreite der Lichtquellen oberhalb von ca. 100 MHz auszudehnen, so sind diese auch in Verbindung mit einer ToF-Kamera als Lichtquelle einsetzbar, sofern sie mit der Mischstufe der Kamera in bekannter Weise synchronisiert werden. Betrifft das mehrere Wellenlängenbereiche, so kann die Entfernungsmessung für jede dieser Wellenlängen einzeln erfolgen, was den Umfang der auswertbaren Echo-Informationen erweitert, denn nicht jede Objektoberfläche ist für eine einzige Wellenlänge gleichermaßen remittierend. Ebenso kann es aber auch genügen, nur eine oder wenige Einzellichtquellen, z. B. im nahen Infrarotbereich, mit einer hohen Modulationsfrequenz zu betreiben und zur Entfernungsmessung zu verwenden, während die übrigen langsamer geschaltet werden, um nur der fotografischen Beleuchtung zu dienen. Uni Störungen durch Fremdlicht, insbesondere die natürliche Objektbeleuchtung, auszuschließen erfolgt dabei eine gepulste oder anderweitig modulierte Beleuchtung, während die Sprungdifferenz aus Hell- und Dunkelsignal verarbeitet wird.
-
Um das Entstehen von unterschiedlichen Halbschatten und in Folge dessen von Farbsäumen in den Bildaufnahmen zu vermeiden ist es von Vorteil, wenn die Beleuchtung konzentrisch zum Strahlengang des Bildempfängers verläuft. Dies wird in bekannter Weise durch Einspiegeln, z. B. über halbdurchlässige Spiegel, erreicht. Als leichter zu realisierender Kompromiss sollte zumindest ein gleicher Abstrahlort von Lichtquellen unterschiedlicher Wellenlängen dadurch erreicht werden, dass diese sehr eng nebeneinander liegen und eine gemeinsame Projektionsoptik nutzen, oder dass durch Ortsveränderung oder durch Verwendung veränderlicher Spiegel nacheinander der gleiche Abstrahlort wirksam ist. Uni Schlagschatten zu vermeiden sollten wenigstens zwei gleichartige Lichtquellen vorgesehen sein, in deren Zentrum sich die Aufnahmekamera befindet.
-
In einer ersten Ausgestaltung der Erfindung wird nur ein Bildempfänger verwendet. Um störende Fremdlichtbereiche auszublenden, werden in dessen Strahlengang optische Bandfilter unterschiedlicher Wellenlängenbereiche eingeschwenkt, z. B. mittels eines Filterrads, bzw. -revolvers. Auch ein optisches Bandfilter mit elektrisch durchstimmbarer Mittenfrequenz ist anstelle wechselbarer diskreter Bandfilter einsetzbar. Für die Aufnahme werden in zeitlicher Folge die verschiedenen Einzellichtquellen nacheinander aktiviert, während gleichzeitig das zugehörige Bandfilter in den Strahlengang geschwenkt wird. Hierzu muss der verwendete Bildempfänger für alle zu empfangenden Lichtwellenlängen empfindlich, also genügend breitbandig sein.
-
In einer anderen Ausgestaltung werden mehrere Bildempfänger verwendet, die jeweils mit einem festen Bandfilter mit verschiedenem Durchlassbereich ausgestattet sind. Hier ist eine gleichzeitige Verarbeitung mehrerer Spektralbereiche möglich – die Einzellichtquellen können also gleichzeitig aktiviert werden, was zur Verkürzung der Aufnahmezeit führt. Allerdings muss dabei eine ausreichende Koinzidenz zwischen den Bildern der verschiedenen Bildempfänger sichergestellt werden. Eine sinnvolle Ausführung sieht vor, ein gemeinsames Abbildungsobjektiv zu verwenden und den bildseitigen Strahlengang mithilfe eines dichroitischen Prismas auf die einzelnen Bildempfänger zu verteilen.
-
In einer weiteren Ausgestaltung wird unmittelbar vor der Empfänger-Bildmatrix eine Farbfiltermatrix mit den genannten Durchlasscharakteristiken angeordnet, wie sie in ähnlicher Form auch von den sehr verbreiteten Farbbild-Sensoren mit Bayer-Matrix bekannt ist. Nachteilig ist dabei allerdings die Aufteilung der verfügbaren Pixelelemente auf die einzelnen Wellenlängenbereiche worunter die Bildauflösung leidet.
-
Letztendlich ist es mit der beschriebenen Anordnung in einer der Ausgestaltungen möglich, Fremdlicht für die Bildaufnahme zu nutzen, gleichzeitig aber die Farbkanäle – darunter auch außerhalb des sichtbaren Spektrums – für die Entfernungsmessung mit gepulstem Eigenlicht einzusetzen.
-
Eine weitere wesentliche Ausgestaltung der Erfindung ist der Aufbau der aus Lichtquellen und Bildempfänger bestehenden Einheit auf einer oder mehreren Drehantrieben in der Weise, dass der Projektionsmittelpunkt des Bildempfängers in der Drehachse eines jeden beteiligten Antriebs liegt. Hierdurch wird es möglich, einen sehr kleinen Bildwinkel mit hoher Auflösung und hoher Reichweite der Lichtquellen zu erfassen, durch nachfolgende Aufnahme von einzelnen Bildsegmenten mit veränderlichen Drehwinkeln aber einen insgesamt unbegrenzten Gesamt-Bildwinkel zu erreichen.
-
Anhand eines Ausführungsbeispiels soll die Erfindung nachstehend erläutert werden. Hierzu zeigt 1 beispielhaft den schematisierten Aufbau einer Aufnahmeanordnung in erfindungsgemäßer Ausführung. Ein ToF-Bildsensor 1 befindet sich in der Bildebene eines Aufnahmeobjektivs 2 und bildet gemeinsam mit diesem den Bildempfänger. Die Lichtquellen 3 besitzen eine Bündelungsoptik, im einfachsten Falle eine Kondensorlinse, die das erzeugte Licht in einem wenig größeren Winkel abstrahlt, als der Aufnahmewinkel des Bildempfängers erreicht. Im Beispiel seien jeweils zwei Infrarot-Quellen, sowie rote, grüne und blaue schmalbandige Lichtquellen symmetrisch zur Aufnahmeachse angeordnet, so dass insgesamt acht Lichtquellen dargestellt sind. Für die Lichtquellen kommen vorzugsweise Halbleiterlaser oder Infrarot-, bzw. Lichtemitterdioden zum Einsatz. Ein Filterrad 4 mit vier Filtern für Infrarot, rot, grün und blau schwenkt wechselweise eines der Filter in den Strahlengang des Bildempfängers. Nicht dargestellt ist die Ansteuer- und Bildverarbeitungs-Elektronik, die für die zeitlich-funktionelle Kopplung aller beschriebenen Elemente in naheliegender Weise sorgt. Um nun eine komplette Bildaufnahme auszuführen wird in jeder der vier Stellungen des Filterrads ein Bild belichtet, während die der ausgewählten Wellenlänge entsprechende Lichtquelle in vorgesehener Form ausgelöst wird. Um ToF-Daten zu gewinnen, sind die Einzelimpulse sehr kurz und synchron zu den Bildaufnahme- und Phasenmessungs-Vorgängen auszuführen. Dies muss aber nicht für alle Kanäle geschehen. Sinnvoll kann es beispielsweise sein, nur den Infrarotkanal zur Messung der Laufzeit zu nutzen, während die übrigen Lichtquellen mit weitaus längeren Impulsen angesteuert werden können, um die Integrationszeit zu verlängern und das Rauschen der Bildsignale zu reduzieren.
-
Bei Aufnahmen in völliger Dunkelheit kann auf das Filterrad verzichtet werden, weil ohnehin nur die jeweils interessierende Lichtquelle angesteuert wird. Falls die Spektralfilter in Matrixform auf den Sensor aufgebracht sind, kann das Filterrad ebenfalls entfallen.
-
Umgekehrt ist es bei Aufnahmen mit genügender Fremdbeleuchtung möglich, auf Lichtquellen im sichtbaren Licht zu verzichten, oder diese in einem Sondermodus nicht mit anzusteuern. Die komplette Aufnahme besteht dann z. B. aus eine ToF-Entfernungsbild-Aufnahme mit Impulsbetrieb der Infrarot-Lichtquelle und drei Farbkanal-Aufnahmen für Rot, Grün und Blau ohne eigene Lichtabstrahlung.
-
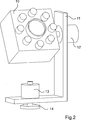
2 zeigt eine Ausgestaltung der Erfindung, bei der eine Aufnahmeeinheit 10, die gemäß 1 aufgebaut und hier aus Richtung der Objekte dargestellt ist auf einem Panoramakopf montiert ist, welcher aus einem Rahmen 11, einem Vertikalantrieb 12 und einem Horizontalantrieb 13 mit Fußscheibe 14 besteht. Die Konstruktion ist dabei so ausgeführt, dass sich die Drehachsen der beiden Antriebe genau im Projektionszentrum des Aufnahmeobjektivs schneiden. Die Antriebe werden während des Aufnahmevorgangs so angesteuert, dass von Einzelbild zu Einzelbild ein Winkelabstand von etwas weniger als dem Bildwinkel des Bildempfängers erreicht wird und in jeder Position wenigstens eine komplette Bildaufnahme ausgelöst wird, die alle interessierenden Spektralanteile nacheinander oder gleichzeitig erfasst.
-
ZITATE ENTHALTEN IN DER BESCHREIBUNG
-
Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen.
-
Zitierte Patentliteratur
-
- DE 102012020922 A1 [0004, 0011]
- DE 102014005514 A1 [0004, 0011]
- DE 4428055 A1 [0008]
- DE 10341822 A1 [0008]
- DE 19746319 A1 [0008]
- DE 20208555 U [0009]
-
Zitierte Nicht-Patentliteratur
-
- Hansard, M et al.: Time-of-Flight Cameras – Principles, Methods and Applications. Springer Briefs In Computer Science (hal-00725654, version 1–7 Dec 2012) [0006]