-
Die Erfindung betrifft eine Vorrichtung und Verfahren zum Reinigen eines Stellplatzes eines Regals gemäß dem Oberbegriff des Patentanspruchs 1.
-
Eine Vorrichtung der eingangs genannten Art ist aus dem Schutzrechtsdokument
JP 2007/168968 A bekannt. Eine solche Vorrichtung besteht aus einem Grundkörper mit einem Körperboden, der einen ersten und einen zweiten Bodenbereich aufweist, wobei bei in das Regal eingebrachtem Grundkörper der erste Bodenbereich einem Lastaufnahmebereich des Stellplatzes und der zweite Bodenbereich einem am Stellplatz vorgesehenen Freibereich zugewandt zugeordnet ist.
-
Unter dem oben genannten Regal ist dabei typischer Weise ein automatisch arbeitendes Kleinteile- oder Hochregallager zu verstehen. Staub und Schmutz sind in solchen Regalen dabei unerwünscht, da durch sie vorhandene Sensoren und/oder die erforderlichen Energie- und Datenübertragungseinrichtungen gestört werden können. Außerdem fördern Verschmutzungen regelmäßig den Verschleiß der Anlage, d. h. sie sind mithin auch deswegen unerwünscht. Ferner besteht die Gefahr, dass sensible Ware oder deren Umverpackung verschmutzt wird.
-
Staub und Verschmutzungen resultieren aus dem laufenden Betrieb oder aus der Bauphase des Lagers. Auch die eingelagerten Waren selbst können Staub freisetzen. Die Reinigung der Lagerstellplätze bzw. Auflagerbereiche selbst verspricht dabei einen nachhaltigeren Erfolg als die Reinigung der nachgelagerten Systeme, wie zum Beispiel der Sensoren, weil Staub, der bereits im Lager ist, mit jeder Lagerbewegung neu aufgewirbelt bzw. weiter verteilt wird.
-
Unter dem oben genannten Grundkörper ist dabei letztlich der eigentliche Korpus der Reinigungsvorrichtung zu verstehen, der praktisch die gleichen Abmessungen aufweist wie zu lagernde Behältnisse, Kartons oder dergleichen, also so genannte, bei derartigen Regalsystemen typische Containments.
-
Unter dem oben genannten Lastaufnahmebereich ist dabei der Bereich des Stellplatzes zu verstehen, auf dem der Grundkörper oder ein entsprechendes Containment tatsächlich abgestellt wird. Häufig handelt es sich dabei um lang gestreckte Containmentauflagen, also zum Beispiel so genannte Winkelauflagen (also insbesondere L-Profile), von denen pro Lastaufnahmebereich regelmäßig zwei Stück vorgesehen sind, nämlich beidseitig unterhalb des zu lagernden Grundkörpers bzw. Containments.
-
Unter dem oben genannten Freibereich ist dabei der Bereich des Stellplatzes zu verstehen, an dem der Grundkörper bzw. das Containment vom Regal nicht unterstützt bzw. untergriffen wird. Sind also zum Beispiel zwei Winkelauflagen vorgesehen, so befindet sich der Freibereich zwischen diesen beiden Winkelauflagen, d. h. die Gesamtfläche des Stellplatzes wird letztlich im wesentlichen aus der Summe aus dem zu reinigenden Lastaufnahmebereich und dem Freibereich gebildet. Je nach Regalsystem kann dabei vorgesehen sein (was noch genauer erläutert wird), dass der Freibereich als Zugriffsbereich für eine Regalbedieneinrichtung ausgebildet ist, d. h. häufig ist es so, dass der Grundkörper bzw. das Containment mit Hilfe der Regalbedieneinrichtung von unten her im Zugriffsbereich angehoben, abgesenkt und verschoben wird. Es gibt aber auch Regalsysteme, bei denen der Grundkörper bzw. das Containment mit Hilfe der Regalbedieneinrichtung an seinen Seitenflanken gegriffen oder über die Vorder- oder Rückseiten des Containments verschoben wird.
-
Unter dem oben genannten Körperboden ist dabei typischer Weise der Boden der Reinigungsvorrichtung zu verstehen, also die Körperfläche, auf der diese abgestellt bzw. auch befördert wird. Dabei weist dieser Körperboden, wie ausgeführt, regelmäßig mindestens zwei Bodenbereiche auf, nämlich einen ersten Bodenbereich, der bei in das Regal eingebrachtem Grundkörper dem Lastaufnahmebereich des Stellplatz zugewandt zugeordnet ist, und einen zweiten Bodenbereich, der bei in das Regal eingebrachtem Grundkörper dem am Stellplatz vorgesehenen Freibereich bzw. Zugriffsbereich für die Regalbedieneinrichtung zugewandt zugeordnet ist. Nochmals in anderen Worten ausgedrückt, sind also die beiden Bodenbereiche in vertikaler Projektion betrachtet etwa deckungsgleich bzw. kongruent mit dem Lastaufnahmebereich und dem Freibereich.
-
Außerdem ist vorzugsweise vorgesehen, dass der Körperboden rechteckig ausgebildet ist, wobei der erste Bodenbereich zwei Abschnitte (für die beiden Winkelauflagen) aufweist, die beidseitig des zweiten Bodenbereichs angeordnet sind.
-
Ferner wird auf das Schutzrechtsdokument
DE 20 2013 004 016 U1 verwiesen. Diese Lösung dient insbesondere zur automatischen Reinigung von Einzelplatzsystemen mit den oben bereits genannten Winkelauflagen. Bei dieser Lösung wird die Regalbedieneinrichtung vor einem Reinigungslauf mit dem Reinigungsgerät auf- und nach dem Reinigungslauf wieder abgerüstet. Aus Sicherheitsgründen ist ein Betrieb der Regalanlagen nicht zulässig, solange sich Personen im Gefahrenbereich befinden. Die Reinigungsvorrichtung muss in jeder Regalgasse auf einem beweglichen Teil (typischer Weise auf dem so genannten Lastaufnahmemittel) der Regalbedieneinrichtung ausgerichtet, fixiert und gegebenenfalls verkabelt werden, ebenso sind die Schmutzbehälter in der Lagergasse zu leeren. Außerdem ist die Steuerung der Regalbedieneinrichtung zur Positionierung am Stellplatz anzupassen. Während der gesamten Dauer der Reinigung steht der betroffene Bereich und somit die darin befindliche Ware nicht zur Verfügung. Ferner müssen die zu reinigenden Lagerbereiche bzw. Stellplätze zunächst geräumt werden, bevor sie gereinigt werden können.
-
Der Erfindung liegt die Aufgabe zugrunde, eine Vorrichtung der eingangs genannten Art zu verbessern. Insbesondere soll eine Vorrichtung und Verfahren geschaffen werden, die eine besonders schnelle, während des laufenden Betriebes der Anlage mögliche Reinigung der Stellplätze des Regals gestatten.
-
Diese Aufgabe ist mit einer Vorrichtung der eingangs genannten Art durch die im Kennzeichen des Patentanspruchs 1 aufgeführten Merkmale und dem Verfahren nach Anspruch 7 gelöst.
-
Nach der Erfindung ist also vorgesehen, dass die Bodenbereiche zueinander verstellbar ausgebildet sind und dass der erste Bodenbereich während einer Reinigungsphase des Regals distanziert zum Lastaufnahmebereich des Stellplatzes angeordnet ist, dass zur Verstellung des ersten oder zweiten Bodenbereichs am Grundkörper eine Verstelleinrichtung vorgesehen ist, dass zur Ausbildung eines autarken, vollautomatischen Reinigungsgeräts die Vorrichtung zum Reinigen in Verbindung mit der vor- und/oder nachgelagerten Fördertechnik zusammenwirkt, dass der Grundkörper eine einem üblichen Containment entsprechende Außenkontur aufweist und dass die Vorrichtung zum Reinigen eine Sensorik und eine Signalverarbeitung aufweist, mit der sie erkennen kann, ob sie sich im Regal befindet.
-
Unter der oben genannten Reinigungsphase ist dabei die Phase im Betriebsablauf des Regalsystems zu verstehen, in der die erfindungsgemäße Vorrichtung zur Reinigung des Stellplatz bzw. genauer betrachtet des Lastaufnahmebereichs eingesetzt wird.
-
Nochmals mit anderen Worten ausgedrückt, zeichnet sich die erfindungsgemäße Lösung somit insbesondere dadurch aus, dass durch die Höhenverstellbarkeit der Bodenbereiche dafür gesorgt ist, dass der erste Bodenbereich den Lastaufnahmebereich während der Reinigungsphase nicht selbst berührt. Stattdessen können vielmehr am Grundkörper vorgesehene Reinigungseinrichtungen, die weiter unten noch genauer erläutert werden, zur Reinigung des erfindungsgemäß freigestellten Lastaufnahmebereichs eingesetzt werden. Es versteht sich dabei von selbst, dass die Verstellbarkeit der Bodenbereiche auch dadurch realisiert sein kann, dass diese zum Beispiel mit beweglichen Füssen, Stempeln, Schiebern oder dergleichen versehen sind, um eine Grenzfläche zwischen dem Grundkörper und dem entsprechenden Widerlager zu definieren.
-
Noch etwas genauer betrachtet führt diese Maßgabe insbesondere dazu, dass der Bewegungsablauf der Regalbedieneinrichtung keiner besonderen Anpassung an die Reinigungsphase bedarf.
-
Zum besseren Verständnis wird hierzu zunächst der Bewegungsablauf bei der Einlagerung eines mit Ware befüllten Containments beschrieben, und zwar beispielhaft an einer Lösung, bei der dieses mit Hilfe einer dieses untergreifenden Regalbedieneinrichtung bewegt wird:
In einem ersten Schritt wird das Containment mit Hilfe der Regalbedieneinrichtung auf eine Höhe etwas oberhalb des Stellplatzes befördert und dann in das Regal eingefahren. Während dieses Schrittes stützt sich das Containment über seinen zweiten Bodenbereich auf einem entsprechend beweglichen Teil (auch Lastaufnahmemittel genannt) der Regalbedieneinrichtung ab.
-
In einem zweiten Schritt wird das Containment abgesenkt, bis es mit seinem ersten Bodenbereich den Lastaufnahmebereich des Stellplatzes berührt. Gleichzeitig liegt es zu diesem Zeitpunkt mit seinem zweiten Bodenbereich auf der Regalbedieneinrichtung auf.
-
In einem dritten Schritt, der sich regelmäßig nahtlos an den zweiten Schritt anschließt, wird die Regalbedieneinrichtung noch weiter abgesenkt, so dass sie den Kontakt zum zweiten Bodenbereich des Containments verliert, das dann mit seiner Last voll auf dem Lastaufnahmebereich des Stellplatzes aufliegt.
-
In einem vierten Schritt wird die Regalbedieneinrichtung aus dem Regal ausgefahren, d. h. der Einlagerprozess ist damit abgeschlossen.
-
Bezogen auf die beanspruchte Reinigungsvorrichtung ergibt sich Dank der erfindungsgemäßen Verstellbarkeit der Bodenbereiche – wieder am Beispiel einer Einlagerung mit einer den Grundkörper untergreifenden Regalbedieneinrichtung betrachtet – folgender Ablauf:
Im ersten Schritt wird die Reinigungsvorrichtung mit Hilfe der Regalbedieneinrichtung auf eine Höhe etwas oberhalb des Stellplatzes befördert und dann in das Regal eingefahren. Während dieses Schrittes stützt sich die Reinigungsvorrichtung über ihren zweiten Bodenbereich voll auf der Regalbedieneinrichtung ab.
-
In einem zweiten Schritt wird die Reinigungsvorrichtung genau wie das Containment abgesenkt. Da aber der erste Bodenbereich erfindungsgemäß gegenüber dem zweiten Bodenbereich während dieser Phase verstellt, insbesondere nach oben verstellt, ist, bleibt eine Berührung der Reinigungsvorrichtung mit dem zu reinigenden Lastaufnahmebereich des Regals aus. Die volle Last des Reinigungsgerätes ruht nach wie vor über den zweiten Bodenbereich auf der Regalbedieneinrichtung.
-
Im dritten Schritt kann die Regalbedieneinrichtung wie bei der normalen Einlagerung eines Containments noch weiter abgesenkt werden, wobei es auch in diesem Schritt Dank der Verstellung des ersten Bodenbereiches zu keinem Kontakt zwischen dem ersten Bodenbereich und dem zu reinigenden Lastaufnahmebereich kommt. Die volle Last des Reinigungsgerätes ruht auch in diesem Schritt nach wie vor über den zweiten Bodenbereich auf der Regalbedieneinrichtung.
-
Im vierten Schritt wird die Regalbedieneinrichtung zusammen mit der Reinigungsvorrichtung aus dem Regal ausgefahren, die während dessen zur Reinigung des nicht mit dem ersten Bodenbereich des Grundkörpers in Kontakt stehenden Lastaufnahmebereichs eingesetzt werden kann.
-
Wie ersichtlich, führt somit die erfindungsgemäße Lösung dazu, dass die Reinigungsphase ohne jede Anpassung der Regalbedieneinrichtung ablaufen kann. Die Reinigungsvorrichtung kann wie ein ganz normales, also mit Ware bestücktes Containment in das Regalsystem eingebracht und transportiert werden. Eine Reinigungsphase kann vorzugsweise immer dann gestartet werden, wenn keine sonstigen Förderanfragen an die Regalbedieneinrichtung gestellt sind. Ist dagegen die Ein- oder Auslagerung eines normalen Containments gewünscht, kann die Reinigungsvorrichtung einfach im Regal selbst abgestellt werden, diesmal dann allerdings bei entsprechend ausgefahrenem ersten Bodenbereich, so dass die genannten vier Schritte genauso wie bei einem normalen Containment ablaufen können.
-
Bezüglich der eingangs genannten, bekannten Reinigungsvorrichtung wird abschließend noch darauf hingeweisen, dass bei dieser die beiden Bodenbereiche fest miteinander verbunden ausgebildet sind bzw. stets eine durchgehende Fläche bilden.
-
Andere vorteilhafte Weiterbildungen der erfindungsgemäßen Vorrichtung ergeben sich aus den abhängigen Patentansprüchen.
-
Die erfindungsgemäße Vorrichtung einschließlich ihrer vorteilhaften Weiterbildungen gemäß der abhängigen Patentansprüche wird nachfolgend anhand der zeichnerischen Darstellung von vier Ausführungsbeispielen näher erläutert.
-
Es zeigt
-
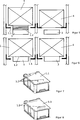
1 schematisch ein Regalsystem mit zwei Stellplätzen, bei dem links eine erste Ausführungsform einer Reinigungsvorrichtung und rechts ein übliches Containment dargestellt ist, wobei sich die Regalbedieneinrichtung in einer oberen Position befindet;
-
2 das Regalsystem gemäß 1, wobei sich die Regalbedieneinrichtung in einer unteren Position befindet und wobei der erste Bodenbereich nach oben verstellt ausgebildet ist;
-
3 perspektivisch von unten die Reinigungsvorrichtung gemäß 1 und 2 mit einem ersten Bodenbereich, der sich auf der gleichen Höhe wie der zweite Bodenbereich befindet;
-
4 die Reinigungsvorrichtung gemäß 3 mit einem gegenüber dem zweiten Bodenbereich ”nach oben” verstellten ersten Bodenbereich;
-
5 schematisch ein weiteres Regalsystem mit zwei Stellplätzen, bei dem links eine zweite Ausführungsform einer Reinigungsvorrichtungen und rechts ein übliches Containment dargestellt ist, wobei sich die Regalbedieneinrichtung in einer unteren Position befindet und wobei der zweite Bodenbereich der Reinigungsvorrichtung nach unten verstellt ausgebildet ist;
-
6 das Regalsystem gemäß 5, wobei sich die Regalbedieneinrichtung in einer oberen Position befindet;
-
7 perspektivisch eine dritte Ausführungsform der Reinigungsvorrichtung von unten, bei der der zweite Bodenbereich in Form von Stempeln ausgebildet ist; und
-
8 perspektivisch eine vierte Ausführungsform der Reinigungsvorrichtung von unten, bei der der zweite Bodenbereich in Form von Schiebern ausgebildet ist.
-
Nachfolgend wird zunächst der technische Hintergrund der erfindungsgemäßen Vorrichtung zur vollautomatischen Reinigung eines Regals genauer betrachtet:
Hochregallager und automatische Kleinteilelager können als Ein- oder Mehrplatzsystem ausgebildet sein, d. h. zwischen benachbarten Regalstehern bzw. -stützen befinden sich in einem so genannten Regalfeld ein oder mehrere Stellplätze. Das System und die Dimensionierung dessen werden dabei auf die zu lagernden Containments 4 abgestimmt. Regalanlagen in Einzelplatzbauweise werden oft als Quertraversenregal (Auflagen quer zur Regalgasse), Regalanlagen in Mehrplatzbauweise werden hingegen als Längstraversenregale (Auflagen längs der Regalgasse) bezeichnet. Unterschiedlichste Lastaufnahmebereiche in unterschiedlichen Ausrichtungen sind demnach zu reinigen.
-
Die gesamte Lagerlogistik basiert darauf, Waren in Behältnissen aufzunehmen. Die Behältnisse zur Lagerung dieser Waren sind unterschiedlichste Containments 4, wie z. B. Behälter, Tablare, Kartons, Paletten, Gitterboxen etc. Die Grundkörper der Containments 4 verfügen auf ihrer Grundfläche meist über eine lange und eine kurze Seite. Diese Behältnisse werden über die Fördertechnik und Lastaufnahmemittel der Regalbedieneinrichtung in einer definierten Ausrichtung transportiert.
-
Das Leitsystem des Lagers kennt zu jedem Zeitpunkt die aktuelle Position jedes einzelnen Behältnisses und somit auch jederzeit alle freien und alle belegten Lagerstellplätze.
-
Kontur, Gewicht und Identifikation der Behältnisse werden an verschiedenen Stellen des Transportweges automatisch überprüft. Behältnisse, die nicht den zulässigen Containments 4 entsprechen oder nicht erfasst werden können (z. B. Barcode am Behältnis in festgelegter Anordnung oder nicht mit den Vorgaben übereinstimmende Kontur), werden zurückgewiesen und wieder ausgeschleust.
-
Das Ein- und Auslagern von Behältnissen in oder aus einer automatisch bediente Regalanlage erfolgt durch Regalförderzeuge, Shuttles, Hubbalkengeräte, Kanalfahrzeuge oder andere Geräte, hier Regalbedieneinrichtungen genannt. Die Ein- und Auslagervorgänge erfolgen über vollautomatische Stellplatzanfahrten über die Lagergassen. Diese Regalbedieneinrichtungen oder auch Regalbediengeräte transportieren dabei die Last bzw. die Behältnisse jeweils zum gewünschten Regalstellplatz links und rechts der Lagergassen und stellen diese darin ab, bzw. nehmen diese auf.
-
Bezogen auf die in den 1 bis 8 teilweise nur schematisch dargestellten Ausführungsbeispiele gilt dabei zunächst ganz allgemein und in an sich bekannter Weise, dass die Vorrichtung zum Reinigen eines Stellplatzes eines Regals aus einem Grundkörper 1 mit einem vorzugsweise eine rechteckige Grundfläche aufweisenden Körperboden besteht, der einen ersten und einen zweiten Bodenbereich 1.1, 1.2 aufweist, wobei bei in das Regal eingebrachtem Grundkörper 1 der erste Bodenbereich 1.1 einem Lastaufnahmebereich des Stellplatzes und der zweite Bodenbereich 1.2 einem am Stellplatz vorgesehenen Freibereich zugewandt zugeordnet ist.
-
Wie oben bereits erwähnt, bezieht sich die genannte Zuordnung dabei auf eine vertikale Projektion, wobei aus den 1, 2, 5 und 6 ersichtlich ist, dass diese Zuordnung selbstverständlich von Toleranzzugaben geprägt ist, d. h. der erste Bodenbereich ist etwa dem Lastaufnahmebereich und der zweite Bodenbereich ist etwa dem Freibereich zugeordnet. Bezogen auf die genannten Figuren wird dabei der Lastaufnahmebereich durch die horizontalen Schenkel der Winkelauflagen und der Freibereich durch den Bereich zwischen den freien Enden der horizontalen Schenkel der Winkelauflagen definiert.
-
Um nun zu erreichen, dass die Regalstellplätze auch während des laufenden Betriebs der Regalanlage ohne besondere Stellplatzpositionierung durch die Regalbedieneinrichtungen und ohne nennenswerte betriebliche Einschränkungen schnell gereinigt werden können, ist erfindungsgemäß vorgesehen, dass die Bodenbereiche 1.1, 1.2 zueinander verstellbar ausgebildet sind und dass der erste Bodenbereich 1.1 während einer Reinigungsphase des Regals distanziert zum Lastaufnahmebereich des Stellplatzes angeordnet ist.
-
Damit ist eine Reinigungsvorrichtung geschaffen, mit der die Lastaufnahmebereiche für sämtliche Lagerbehältnisse in festgelegter Reihenfolge autark gereinigt werden können, wobei eine solche Reinigung sogar noch vor der Erstnutzung des Regalsystems möglich ist, ohne dabei die Inbetriebnahmezeit des Lagers für die Dauer der Reinigung nennenswert zu beeinträchtigen. Selbstverständlich verkürzt dabei ein vorzugsweise vorgesehener Parallelbetrieb mehrerer Reinigungsvorrichtung nochmals die Gesamtreinigungszeit.
-
Dadurch, dass dabei der vorzugsweise quaderförmig ausgebildete Grundkörper 1, der vorzugsweise eine Höhe zwischen 150 und 250 mm, insbesondere von 170 mm, aufweist, erfindungsgemäß eine einem üblichen Containment 4 entsprechende Außenkontur aufweist bzw. dass das Reinigungsgerät einen üblichen Lagerbehälter in etwa nachbildet bzw. dass der Grundkörper 1 den hinterlegten Anforderungen bis hin zu verwendeten Werkstoffen, zulässigen Maßtoleranzen etc. entspricht, ist es darüber hinaus problemlos möglich, dass die Reinigungsvorrichtung von der dem Lager vor- bzw. nachgelagerten Fördertechnik bzw. der Lagerlogistik vollautomatisch zu ihrem Einsatzort im Lager und wieder heraus transportiert werden kann.
-
Nochmals in anderen Worten ausgedrückt, besteht die erfindungsgemäße Lösung somit – abgesehen von dem noch im Detail zu erläuternden, mindestens teilweise verstellbaren Körperboden – insbesondere in der Verwendung von Behältnissen zur Aufnahme der Gerätebauteile, mit der Formgebung, der Art, dem Aufbau und Gewicht sowie dem Identifikationssystem der für das betreffende Lager vorgesehenen Lagerbehältnisse, die in Verbindung mit den nachfolgend noch beschriebenen technischen und steuerungstechnischen Einbauten zu autarken Reinigungsgeräten werden. Die Reinigungsvorrichtung hat demnach die gleichen Ausprägungen wie das Lagerbehältnis und ist somit in der Lage jedes freie Fach zu reinigen, das ansonsten ein Lagerbehältnis aufnimmt.
-
Verfahrensmäßig ausgedrückt, ist erfindungsgemäß vorgesehen, dass die Bodenbereiche 1.1, 1.2 während der Reinigungsphase in zueinander vertikal unterschiedliche Positionen gebracht werden. Noch etwas genauer betrachtet, ist dabei besonders bevorzugt vorgesehen, dass die Reinigungsphase wahlweise mindestens während des Ein- oder Ausbringens des Grundkörpers 1 in das Regal durchgeführt wird.
-
Das Reinigungsgerät kann somit dank der Verstellbarkeit des Körperbodens von der Regalbedieneinrichtung bei der Reinigung bzw. während der Reinigungsphase weitestgehend wie ein Lagerbehältnis bei einem vollautomatischen Ein- oder Auslagervorgang innerhalb einer Regalanlage gehandhabt werden. Eine Ausstattungsänderung, besondere Schnittstellen zum Signalaustausch zwischen Regalbediengerät 3 und Reinigungsgerät sind dabei nicht erforderlich, ebenso entfällt eine besondere Lagerkoordinatenpositionierung an der Regalbedieneinrichtung.
-
Wieder zur gegenständlichen Betrachtung der erfindungsgemäßen Vorrichtung zurückkehrend, ist noch etwas genauer betrachtet vorgesehen, dass die Bodenbereiche 1.1, 1.2 bei bestimmungsgemäßer Benutzung der Vorrichtung in vertikaler Richtung zueinander verstellbar ausgebildet sind. Bevorzugt ist dabei ein Verstellbereich in der Größenordnung des Hubes der Regalbedieneinrichtung beim Ein- und Auslagern, insbesondere in der Größenordnung zwischen 10 und 150 mm.
-
Wie aus den 1, 2, 5 und 6 ersichtlich, ist dabei besonderes bevorzugt vorgesehen, dass wahlweise der erste oder der zweite Bodenbereich 1.1, 1.2 faltbalgartig verstellbar zum Grundkörper 1 ausgebildet ist. Bezüglich des an sich bekannten Begriffes ”Faltenbalg” wird der Einfach- und Vollständigkeit halber auf folgenden Wikipedia-Artikel verwiesen: http://de. wikipedia.org/w/index.php?title=Faltenbalg&oldid=134766118.
-
Zur Verstellung des Körperbodens bzw. des ersten oder zweiten Bodenbereichs 1.1, 1.2 ist dabei am Grundkörper 1 eine (nicht extra dargestellte) vorzugsweise druckbetätigte Verstelleinrichtung vorgesehen. Die Druckbetätigung erfolgt dabei vorzugsweise über eine ohnehin für die Reinigungsaufgabe im Grundkörper 1 untergebrachte Gebläse- bzw. Saugeinrichtung.
-
Nochmals auf die beiden Bodenbereiche 1.1, 1.2 zurückkommend, ist ferner besonders bevorzugt vorgesehen, dass wahlweise der erste oder der zweite Bodenbereich 1.1, 1.2 verstellbar zum Grundkörper 1 und entsprechend umgekehrt der zweite oder erste Bodenbereich 1.2, 1.1 unverstellbar zum Grundkörper 1 ausgebildet ist.
-
Mit Verweis auf die konkrete Ausführungsform gemäß 3 und 4 ist dabei weiterhin besonders bevorzugt der erste Bodenbereich 1.1 beidseitig des zweiten Bodenbereichs 1.2 angeordnet, wobei darüber hinaus bevorzugt vorgesehen ist, dass sowohl die beidseitig des zweiten Bodenbereichs 1.2 angeordneten ersten Bodenbereiche 1.1 als auch diese selbst eine rechteckige Grundfläche aufweisen.
-
Um die Reinigungsvorrichtung bestimmungsgemäß verwenden zu können, ist der Grundkörper 1 darüber hinaus mit Reinigungseinrichtungen 2 wie einer (bereits erwähnten) Saug- oder Gebläseeinrichtung, einem Staubabscheider, einem Staubsammelbehälter, einem Energiespeicher, Sensoren, Düsen und dergleichen versehen. Vorzugsweise sind dabei, worauf unten noch genauer eingegangen wird, Teile der Reinigungseinrichtungen 2 verstellbar außen am Grundkörper 1 angeordnet, wobei alle übrigen Bauteile im Grundkörper 1 untergebracht sind. Außerdem ist den Reinigungseinrichtungen 2 zu deren Steuerung eine vorzugsweise im Grundkörper 1 angeordnete elektronische Steuerungseinrichtung zugeordnet.
-
Die konkrete Ausbildung der erfindungsgemäßen Reinigungsvorrichtung einschließlich Reinigungsköpfen bzw. -düsen wird insbesondere durch die zu verwendenden Containments 4, das Fördersystem, das Regalanlagensystem, die Lastauflagenausbildung und Verschmutzungsart bestimmt. Besondere Anforderungen an die Reinigungsvorrichtung stellen dabei auch die unterschiedlichsten Lastaufnahmemittel der Regalbedieneinrichtung und somit das Lastenhandling durch Teleskopieren mittels Doppelteleskop, Lasttisch oder Kombilastaufnahme etc.
-
Betrachtet man zunächst die Reinigung von Einzelplatzsystemen, z. B. Regale mit Winkelauflagen, Quertraversen, Paneele mit Lichtraumprofilen zur Unterfahrt der zu lagernden Kartons, etc. (mittels Lastaufnahmemittel), so ergibt sich Folgendes (dabei wird bei den nachfolgenden Erläuerungen stets davon ausgegangen, dass die so genannte Regalgasse eine Ebene in X-Y-Richtung aufspannt, wobei die X-Richtung horizontal und die Y-Richtung vertikal verläuft. Die verbleibende Z-Richtung ist dementsprechend wie bei einem üblichen Koordinatensystem senkrecht zur X-Y-Ebene orientiert):
Wenn das Regalbediengerät 3 das Lastaufnahmemittel im Rahmen eines Einlagervorganges durch Verschieben des Lastaufnahmemittels in Z-Richtung in den Regalstellplatz bewegt, absenkt und durch Verschieben des Lastaufnahmemittels in Z-Richtung aus dem Regalstellplatz bewegt (ein gewöhnliches Behältnis würde jetzt auf dem Regalstellstellplatz stehenbleiben), bleibt das Reinigungsgerät durch sein Eigengewicht auf dem Lastaufnahmemittel in unveränderter Position (optional fährt dabei eine Zentrierung bzw. Fixierung aus) und wird mit diesem wieder aus dem Stellplatz bewegt. Die Düsen gleiten dabei in Z-Richtung über die Lastaufnahmebereiche bzw. Regalstellplatzprofile bzw. -flächen und reinigen sie.
-
Das Regalbediengerät 3 kann anschließend sofort den nächsten Stellplatz zur Reinigung anfahren.
-
Die Lagerstellplätze zum Lagern von Behältnissen können, wie erläutert, beim Einzelplatzsystem eines Kleinteilelagers lediglich aus Auflagewinkeln bestehen, die links und rechts unter die Behältnisse greifen. Die Behältnisse stehen dann zur Einlagerung mittig auf den Lastübergabeplätzen des vorgelagerten Fördersystems und werden den Regalbediengeräten 3 definiert übergeben. Die Behältnisse lassen sich dann am Lagerstellplatz zentriert zwischen die Auflagewinkel fahren und dort absenken. Dadurch bleiben die Behältnisse auf den Lastauflagewinkeln stehen und das nun freigewordene Lastaufnahmemittel des Regalbediengerätes 3 kann wieder herausgezogen werden.
-
Das Reinigungsgerät erkennt, wenn es in einen Lagerstellplatz eingefahren wird. Es startet von diesem Ereignis gesteuert sein Reinigungssauger bzw. -gebläse. Der Start des Reinigungssaugers bzw. -gebläses bewirkt dabei zweierlei: Erstens entsteht in den Verstelleinrichtung des Grundkörpers 1 durch das Gebläse ein Unterdruck, so dass die ersten Bodenbereiche 1.1 eingezogen werden. Zweitens ist das Reinigungssystem nun bereit zur Schmutzaufnahme und nimmt mit seinen nun vorstehenden Düsen in unterschiedlichster Ausprägung und Dimension, Schmutz von den zu reinigenden Lastaufnahmebereichen bzw. Oberflächen auf.
-
Abhängig vom Ereignis ”Einfahren ins Lagerfach” können gegebenenfalls die Reinigungsdüsen oder zusätzliche Reinigungsdüsen ausgefahren werden, um eine bessere Anpassung an die Kontur der Lastaufnahmenbereiche bzw. Auflageflächen zu erreichen. Das Reinigungsgerät wird dabei wie ein Lagerbehältnis vom Regalbediengerät 3 im Regalanlagenstellplatz abgesenkt.
-
Abhängig vom Ereignis ”Ausfahren aus dem Lagerfach” werden zusätzlich die Reinigungsdüsen eingefahren, um die Einfahrt ins nächste Fach zu erleichtern und um zu erreichen, dass das Reinigungsgerät gegenüber einem standardisierten Behältnis keine überstehenden Konturen aufweist.
-
Weil die Lastaufnahmebereiche bzw. Lastauflageflächen erfindungsgemäß während der Reinigungsphase gegenüber der Geräteunterseite bzw. dem Körperboden beabstandet sind, setzt sich das Reinigungsgerät nicht auf den Lastauflagen ab, sondern nur die beweglich gelagerten Düsen gleiten über die zu reinigenden Oberflächen.
-
Sobald nach einer einstellbaren Zeit keine neue Einfahrt in einen Stellplatz erkannt wurde, wird das Gebläse wieder ausgeschaltet. Dadurch senken sich die Gerätauflageflächen wieder ab und das Reinigungsgerät nimmt wieder die Kontur des Lagerbehältnisses an.
-
Es ist auf diese Weise auch möglich, das Reinigungsgerät auf einem Stellplatz in (oder außerhalb des Lagers) zu parken, um z. B. die Reinigung zu unterbrechen, zwischendurch Waren ein- oder auszulagern und die Reinigung anschließend wieder aufzunehmen.
-
Bei Regalbediengeräten 3 mit mehreren Lastaufnahmemitteln kann das Reinigungsgerät auch gegebenenfalls auf einer der Lastaufnahmemittel verbleiben.
-
Vorteilhaft ist es, wie oben bereits erwähnt, wenn das Reiniungsgerät über eine eigene Sensorik und Signalverarbeitung verfügt, mit der es erkennen kann, ob es sich gerade im Regal befindet, d. h. reinigen soll, oder ob gerade keine Reinigungsaktivität stattfinden soll, weil es z. B. erst auf dem Weg zum Regal ist oder sich gerade in einer Parkposition befindet, weil die verfügbaren und hier verwendbaren Energiespeicher nur eine begrenzte Laufzeit erlauben.
-
Mit Sensoren kann man die Vorbeifahrt an vertikalen Regalstehern von der Vorbeifahrt an anderen Einbauten unterscheiden. Damit lässt sich auch die Fahrtrichtung ”ins Regal hinein” von der Fahrtrichtung ”aus dem Regal heraus” unterscheiden. Ein Sensor, der erkennt, ob das Reinigungsgerät auf dem Lastaufnahmemittel steht (das kann ein einfacher Drucktaster im Geräteboden sein), kann die Steuerung und Sensorik abschalten, weil sie nicht gebraucht wird, solange das Reinigungsgerät auf dem Regalstellplatz abgestellt ist. Mit einem sensorisch so ausgerüsteten Reinigungsgerät wird der Reinigungsbetrieb nochmal erheblich effizienter: Das Reinigungsgerät kann dann jederzeit in einem freien Fach abgestellt werden, wenn z. B. Ein- oder Auslagerungsaufträge ausgeführt werden sollen. Es schaltet sich dort komplett ab und kann stehenbleiben, bis es wieder gebraucht wird. Sobald das Gerät wieder aufgenommen wird, schalten sich die Steuerung und die Sensorik wieder ein und das Gerät ist sofort wieder betriebsbereit. Da das Reinigungsgerät wie ein Lagerbehältnis über alle Fördersysteme transportiert wird, kann dieses jederzeit mit der vorhandenen Fördertechnik zu bzw. von außerhalb des Lagers liegenden Bereichen transportiert werden; z. B. zur Energieversorgung, zum Ladevorgang, zur Wartung, zur Entleerung des Schmutzbehälters – und zwar ohne dass Personen den Lagerbereich betreten müssen.
-
Mit Bezug auf die Ausführungsform gemäß den 3 und 4 ist dabei noch darauf hinzuweisen, dass insbesondere bei Regalsystemen, bei denen die Containments 4 beidseitig der Ebene der Lagergasse eingelagert werden können, die Reinigungseinrichtung 2 entsprechend nicht nur einseitig, sondern beidseitig am Grundkörper 1 vorgesehen sein können.
-
Betrachtet man nunmehr die Reinigung von Mehrplatzsystemen, z. B. Längstraversen, Paneele, etc., so ergibt sich Folgendes:
Das Reinigungsgerät wird von dem Regalbediengerät 3 bei der Reinigung von Mehrplatzsystemen genauso gehandhabt wie ein Lagerbehältnis bei einem vollautomatischen Einlagervorgang innerhalb einer Einzelstellplatz-Regalanlage.
-
Wenn das Regalbediengerät 3 nun sein Lastaufnahmemittel im Rahmen eines Einlagervorganges durch Verschieben des Lastaufnahmemittels in Z-Richtung in den Regalstellplatz bewegt und absenkt, wird es über die Regalstellplatzkonstruktion bewegt (ein gewöhnliches Behältnis würde jetzt auf dem Regalstellplatz stehenbleiben), das Reinigungsgerät bleibt durch sein Eigengewicht auf dem Lastaufnahmemittel in unveränderter Position (optional fährt eine Zentrierung bzw. Fixierung aus) und wird mit diesem über die Traversen, Paneele, etc. bewegt. Die Düsen gleiten dabei über die Regalstellplatzprofile bzw. -flächen und reinigen diese.
-
Abschließend werden noch kurz die 1, 2, 5 und 6 im Detail erläutert:
Links in 1 ist die Situation dargestellt, bei der der Grundkörper 1 mit der Regalbedieneinrichtung, genauer gesagt mit deren Lastaufnahmemittel (das Rechteck unterhalb des Grundkörpers 1), in ein Regal eingebracht wird. In dieser Situation befinden sich die beiden Bodenbereiche 1.1 und 1.2 noch in der gleichen Ebene. Rechts in 1 ist die vergleichbare Situation für ein übliches Containment 4 dargestellt.
-
In 2 ist nun links dargestellt, dass die ersten Bodenbereiche 1.1 nach oben verstellt sind, so dass die vollzogene Absenkung des Lastaufnahmemittel dennoch nicht dazu geführt hat, dass der Grundkörper 1 die Lastaufnahmebereiche berührt. Da das Containment 4 rechts in 2 keinen verstellbaren Körperboden aufweist, setzt der Grundkörper 1 beim Ablassen des Lastaufnahmemittels in bekannter Weise auf den Lastaufnahmebereichen auf.
-
Wird nun, wie beim Auslagern üblich, das Lastaufnahmemittel aus dem Regal herausgezogen, können mit der erfindungsgemäßen Reinigungsvorrichtung die auf die beschriebene Weise freigestellten Lastaufnahmebereiche problemlos gereinigt werden.
-
Eine ganz ähnliche Konstellation ergibt sich schließlich gemäß 5 und 6, bei denen jeweils links eine Reingigungsvorrichtung mit einem verstellbaren zweiten Bodenbereich 1.2 dargestellt ist. Auch in diesem Fall führt diese Verstellbarkeit des Körperbodens dazu, dass eine Bewegung des Lastaufnahmemittel in Z-Richtung zur Reinigung der Lastaufnahmebereiche verwendet werden kann.
-
Bezugszeichenliste
-
- 1
- Grundkörper
- 1.1
- erster Bodenbereich
- 1.2
- zweiter Bodenbereich
- 2
- Reinigungseinrichtung
- 3
- Regalbediengerät
- 4
- Containment