-
Ausführungsbeispiele der vorliegenden Erfindung schaffen einen Drehwinkelsensor zur Erfassung eines absoluten Drehwinkels bei Einfach- oder Mehrfachumdrehungen. Weitere Ausführungsbeispiele schaffen einen Drehwinkelsensor mit der Möglichkeit einer Feststellung/Überwachung von Toleranzabweichungen. Weitere Ausführungsbeispiele der vorliegenden Erfindung schaffen ein Verfahren zur Bestimmung eines absoluten Drehwinkels.
-
Für viele Anwendungen müssen Winkel gemessen werden, die einen Winkelabstand von mehr als 360° haben, d. h. es muss mehr als eine volle Umdrehung vollzogen werden, um von dem einen Winkel zu dem anderen Winkel zu gelangen. Beispiele für derartige Anwendungen finden sich z. B. in der Automobiltechnik, wenn für ein elektrisches Lenksystem oder eine Servolenkung die aktuelle Lenkradstellung bestimmt werden soll. Weitere Anwendungen finden sich beispielsweise in der Robotertechnik und in der Hebetechnik (Kräne, Aufzüge, Gabelstapler etc.), bei denen sich z. B. eine Seiltrommel oder -winde über einen Bereich von mehreren Umdrehungen drehen kann.
-
Bei einem Drehwinkelsensor, der einen absoluten Drehwinkel als Ausgangswert liefert, wird der absolute Drehwinkel typischerweise direkt anhand einer aktuellen Konfiguration bzw. internen Stellung des Drehwinkelsensors bestimmt. Im Gegensatz dazu messen differenzielle Drehwinkelsensoren oder relative Drehwinkelsensoren den Betrag und ggf. die Richtung einer Drehbewegung, so dass in der Regel zunächst ein bekannter Referenzwinkel angefahren werden muss, von dem aus sich andere Winkel durch Differenzbildung bestimmten lassen. Allerdings addieren sich auch kleine Ungenauigkeiten bei der relativen Drehwinkelbestimmung auf, insbesondere wenn Mehrfachumdrehungen durchgeführt werden.
-
Viele derzeit verwendete absolute Winkelsensoren haben einen Permanentmagneten, der an einem Wellenende befestigt ist, und einen Magnetfeldsensor, der in einer Verlängerung der Wellenachse platziert ist. Wenn sich die Welle dreht, dreht sich auch das Magnetfeld des Permanentmagneten relativ zu dem Magnetfeldsensor, welcher selber ruht. Der Sensor detektiert das magnetische Feld und leitet daraus den Drehwinkel ab. Derartige Systeme können horizontale Hall-Sensoren (HHall-devices) oder vertikale Hall-Sensoren (VHall-devices) oder magnetoresistive Sensoren wie GMR-Sensoren (giant magneto-resistors) oder AMR-Sensoren (anistropic magneto-resistors) oder exotischere XMR-Sensoren (wobei die Abkürzung XMR als Oberbegriff des auf den Magnetowiderstandseffekten AMR, GMR, TMR, CMR und GMI beruhenden technischen Know-Hows dient) oder Kombinationen davon verwenden. Sie können Winkel zwischen 0° und 360° detektieren. Mit derartigen absoluten magnetischen Winkelsensoren ist es schwierig, eine Anordnung mit einer Durchgangswelle zu schaffen, d. h. wenn der Sensor exzentrisch zur, anstelle von auf bzw. in Verlängerung der Drehachse platziert werden muss.
-
Viele derzeit verwendete differenzielle bzw. relative magnetische Winkelsensoren haben ein Messrad mit einer Vielzahl von permanentmagnetisierten Nord- und Südpolen oder sind gemacht aus weichmagnetischen Material mit Zähnen und Kerben. Das/die Sensorelement(e) ist/sind nahe dem Umfang des Rads platziert (leicht versetzt mit einem Spalt entweder in radialer oder in axialer Richtung; dies wird Luftspalt genannt). All die oben genannten Sensortechnologien sind auch verwendbar für diese Typen von Drehwinkelsensoren. Üblicherweise detektieren sie Fluktuationen des magnetischen Felds, wenn das Rad sich dreht. Ein Algorithmus detektiert die Extremstellen dieses Musters und leitet daraus Schaltpunkte ab: typischerweise sind die Schaltpunkte Durchschnittswerte von vorhergehenden Maxima und Minima. Wenn z. B. 60 Nord- und Südpole (d. h. p = 60 Polpaare) entlang des Umfangs des Rads angeordnet sind, kann der Sensorwinkel Inkremente von 360°/60/2 = 3° auflösen, also einer Halbperiode. Im Prinzip ist es möglich, zwischen jedem Inkrement zu interpolieren, weil die Feldvariation typischerweise sinusförmig ist. Die absolute Winkelgenauigkeit ist jedoch oft herabgesetzt durch inakkurate Magnetisierungsmuster oder ungenügende Empfindlichkeit der Sensorelement oder ungenügende Robustheit gegen externe magnetische Störungen bei großen Luftspalten (insbesondere für kleine magnetische Domänen, was einen großen Wert für die Zahl der Polpaare p bedeutet).
-
In allen zuvor genannten Fällen von absolute Winkelsensoren ist der Bereich der detektierbaren Winkel höchstens 360°. Wenn mehrere Umdrehungen detektiert werden sollen, verwenden einige derzeit verwendete Drehwinkelsensoren Getriebe, welche die Drehung der Welle auf zwei Wellen mit unterschiedlicher Drehgeschwindigkeit kopieren. Jede der zwei Wellen hat ihren eigenen Magneten mit seinem zugewiesen Sensor und beide Sensorsignale werden verglichen, um den absoluten Winkel zu bestimmen. Wenn das Über- bzw. Untersetzungsverhältnis der beiden Magneten zum Beispiel 1:5 beträgt, ist es möglich, Winkel in einem Bereich von 5·360° zu detektieren, wobei jedoch, wenn das Über- bzw. Untersetzungsverhältnis groß ist, selbst geringe Fehler der zwei Winkelsensoren große Fehler im absoluten Winkel ergeben können, welcher ein Vielfaches von 360° erreichen kann. Derartige Systeme sind sperrig, kostspielig aufgrund der Getriebe und es ist typischerweise nicht möglich, sie sehr klein zu bauten, da dies zu einem magnetischen Übersprechen zwischen den zwei Sensorsystemen führen würde, wofür es keine einfache Korrekturmöglichkeit gibt.
-
Das deutsche Patent
DE 103 34 869 B3 beschreibt einen Drehwinkelsensor. Der Drehwinkelsensor hat eine drehbare Welle, die mit einem Permanentmagneten gekoppelt ist, sowie ein magnetempfindliches Sensorelement, das in Abhängigkeit vom relativen Drehwinkel zwischen Magnet und Sensorelement ein sinusförmiges und ein kosinusförmiges Ausgangssignal erzeugt, sowie eine Auswerteelektronik, die aus dem Ausgangssignalen ein dem Drehwinkel entsprechendes Signal erzeugt. Die Welle ist längs einer Führungsbahn bei ihrer Drehung um ihre Achse zusätzlich linear parallel zu ihrer Achse verschieblich geführt, so dass sich der Abstand zwischen Magnet und Sensor bei der Drehung entsprechend einer Steigung der Führungsbahn verändert. Aus den Sensorsignalen wird zusätzlich ein Signal B(z) ermittelt, das den Betrag der von dem Abstand abhängigen Feldstärke entspricht. Hieraus wird ein Grobsignal ermittelt, aus dem die Anzahl der Umdrehungen ermittelbar ist. Aus den sinus- und kosinusförmigen Sensorsignalen wird eine Feinsignal bestimmt, das zur Anzahl der Umdrehungen mal 360° hinzuaddiert wird.
-
Die deutsche Offenlegungsschrift
DE 10 2005 043 301 A1 beschreibt eine Vorrichtung zur Bestimmung eines absoluten Drehwinkels. Die Vorrichtung umfasst eine erste Messeinrichtung zur Messung eines Drehwinkels in einem eingeschränkten ersten Messbereich und eine zweite Messeinrichtung zur Ermittlung eines absoluten Winkelbereichs. Die zweite Messeinrichtung bildet eine Drehung der Drehachse als lineare Verschiebung ab.
-
Die
US 2009/0102460 A1 bezieht sich auf einen Positionssensor.
-
Die
DE 19722016 A1 bezieht sich auf eine Anordnung zur berührungslosen Drehwinkelerfassung.
-
Die
EP 2 354 769 A1 bezieht sich auf einen Winkelgeber und ein Verfahren zur Bestimmung eines Winkels zwischen einer Sensoranordnung und einem Magnetfeld.
-
Die
JP 2009-271054 A bezieht sich auf eine Positionserfassungsvorrichtung und einen Linearbewegungsdrehmotor mit dieser Vorrichtung.
-
Es wäre wünschenswert, einen absoluten Winkelsensor zur Verfügung zu haben, der in Konfigurationen mit einer durchgehenden Welle montiert werden kann, und der Winkelbereiche von bis zu mehreren Umdrehungen detektieren kann. Es wäre auch wünschenswert, einen Drehwinkelsensor zu schaffen, der eine Feststellung oder Überwachung erlaubt, ob ein Toleranzbereich, der für eine Genauigkeit der Drehwinkelmessung relevant, eingehalten oder verlassen wurde.
-
Diese Aufgabe(n) wird gelöst durch einen Drehwinkelsensor gemäß Anspruch 1, Anspruch 12 oder Anspruch 13, ein Verfahren gemäß Anspruch 22 und ein Computerprogramm gemäß Anspruch 29.
-
Ausführungsbeispiele der vorliegenden Erfindung schaffen einen Drehwinkelsensor zur Erfassung eines absoluten Drehwinkels bei Einfach- oder Mehrfachumdrehungen bezüglich einer Rotationsachse. Der Drehwinkelsensor umfasst einen Magnetfeldsensor und eine Geberanordnung. Der Magnetfeldsensor ist konfiguriert zur Erfassung von zumindest zwei orthogonalen Größen eines Magnetfelds im Wesentlichen am gleichen Ort. Die Größen können Winkel, Betrag oder vorzeichenbehafteter Betrag des von dem Magnetfeldsensor erfassten Magnetfelds sein. Die Geberanordnung ist ausgehend von der Rotationsachse in einer radialen Richtung zu dem Magnetfeldsensor versetzt und in Abhängigkeit von dem absoluten Drehwinkel relativ zu dem Magnetfeldsensor um die Rotationsachse drehbar, so dass das von dem Magnetfeldsensor erfasste Magnetfeld von einer relativen Winkelposition der Geberanordnung zu dem Magnetfeldsensor abhängt. Mindestens eine andere, dazu orthogonale Komponente hängt von einer relativen translatorischen Position der Geberanordnung zu dem Magnetfeldsensor ab. Zum Beispiel kann eine Komponente des Magnetfelds vorwiegend die rotatorische Position wiederspiegeln während mindestens eine andere Komponente des Magnetfelds vorwiegend die translatorische Position wiedergibt. Aus den zumindest zwei von dem Magnetfeldsensor erfassten orthogonalen Größen des Magnetfelds ist die relative Winkelposition und die relative translatorische Position der Geberanordnung zu dem Magnetfeldsensor bestimmbar. Weiterhin ist nun der absolute Drehwinkel mittels der relativen Winkelposition und der relativen translatorischen Position bestimmbar.
-
Gemäß alternativen Ausführungsbeispielen umfasst der Drehwinkelsensor einen Magnetfeldsensor zur Erfassung von zumindest zwei orthogonalen Größen eines Magnetfelds im Wesentlichen am gleichen Ort, wobei die Größen zumindest eines von Winkel, Betrag und vorzeichenbehaftetem Betrag von zumindest zwei zueinander orthogonalen Richtungskomponenten des erfassten Magnetfelds sind, und wobei eine der Richtungskomponenten parallel zu der Rotationsachse ist. Der Drehwinkelsensor umfasst auch eine Geberanordnung mit zumindest vier Geberelementen. Die Geberanordnung ist in Abhängigkeit von dem absoluten Drehwinkel relativ zu dem Magnetfeldsensor um die Rotationsachse drehbar, so dass mindestens eine Komponente des auf den Magnetfeldsensor einwirkenden Magnetfelds von einer relativen Winkelposition abhängt und zumindest eine andere, dazu orthogonale Magnetfeldkomponente von einer relativen translatorischen Position der Geberanordnung zu dem Magnetfeldsensor abhängt. Aus den zumindest zwei von dem Magnetfeldsensor erfassten orthogonalen Größen des Magnetfelds ist die relative Winkelposition und die relative translatorische Position der Geberanordnung zu dem Magnetfeldsensor bestimmbar. Der absolute Drehwinkel ist in der Folge mittels der relativen Winkelposition und der relativen translatorischen Position bestimmbar.
-
Weitere Ausführungsbeispiel schaffen ein Verfahren zur Bestimmung eines absolualten Drehwinkels, das folgende Handlungen oder Aktionen umfasst: Empfangen eines ersten Sensorsignals und eines zweiten Sensorsignals von einem Magnetfeldsensor; Bestimmen einer relativen translatorischen Position einer Geberanordnung zu dem Magnetfeldsensor; Bestimmen einer relativen Winkelposition der Geberanordnung zu dem Magnetfeldsensor; und Bestimmen des absoluten Drehwinkels auf der Grundlage der bestimmten bzw. ermittelten relativen translatorischen Position und der bestimmten bzw. ermittelten relativen Winkelposition. Das erste Sensorsignal und das zweite Sensorsignal stellen zwei orthogonalen Größen (Winkel, Betrag oder vorzeichenbehafteter Betrag, etc.) eines von dem Magnetfeldsensor erfassten Magnetfelds im Wesentlichen am gleichen Ort dar. Eine der orthogonalen Größen ist eine zu der Rotationsachse parallele Richtungskomponente des Magnetfelds. Das Bestimmen der relativen translatorischen Position erfolgt durch Auswertung des ersten Sensorsignals. Das Bestimmen der relativen Winkelposition erfolgt durch Auswertung von zumindest dem ersten Sensorsignal und dem zweiten Sensorsignal.
-
Ausführungsbeispiele basieren darauf, dass zwei orthogonale Größen eines im Wesentlichen an einem Ort erfassten bzw. gemessenen Magnetfelds unterschiedlich auf eine Änderung der relativen Winkelposition zwischen Magnetfeldsensor und Geberanordnung bzw. einer Änderung der relativen translatorischen Position zwischen diesen beiden Bestandteilen reagieren. Dadurch dass beide Größen zum selben Magnetfeld gehören und im Wesentlichen am gleichen physikalischen Ort von dem Magnetfeldsensor erfasst bzw. gemessen werden, lassen sich viele Probleme beseitigen oder zumindest verringern, die z. B. mit Montagetoleranzen von zwei Magnetfeldsensoren zusammenhängen, die an unterschiedlichen Orten angebracht werden. Des Weiteren heben sich bei den durchzuführenden Berechnungen einige toleranz- und/oder alterungsbehaftete Parameter heraus, so dass eine Ungenauigkeit oder Änderung dieser Parameter (so gut wie) keinen Einfluss auf das Ergebnis hat. Beispielsweise weisen sämtliche Größen des Magnetfelds eine (im wesentlichen) lineare Abhängigkeit von einer magnetischen Remanenz bzw. Remanenzflussdicht eines Permanentmagneten auf, der zur Erzeugung des Magnetfelds verwendet wird. Somit wirkt sich eine beispielsweise alterungsbedingte Änderung dieser Remanenz im gleichen Maße auf die Stärke bzw. Amplitude der drei Größen des Magnetfelds aus.
-
Eine Anordnung, bei der der Magnetfeldsensor und die Geberanordnung in radialer Richtung zueinander versetzt sind, ermöglicht auf einfache Weise eine Kombination des vorgeschlagenen Drehwinkelsensors mit einer Durchgangsachsenanordnung. Weiterhin ist eine derartige Anordnung relativ platzsparend zu realisieren und ein ggf. vorhandenes Getriebe zur Erzeugung der translatorischen Relativbewegung zwischen Magnetfeldsensor und Geberanordnung lässt sich auf relativ einfache Weise realisieren.
-
Sofern die Geberanordnung ein Multipolrad umfasst, wie es bei einigen Ausführungsbeispielen vorgesehen ist, zeichnen sich Ausführungsbeispiele dadurch aus, dass sich zumindest eine der zwei orthogonalen Größen des Magnetfelds in Abhängigkeit von der relativen translatorischen Position ändert. Auf diese Weise lässt sich eine eventuelle Mehrdeutigkeit innerhalb der relativen Winkelposition, die sich auf die sektormäßige Unterteilung des Multipolrads in identische oder ähnliche Abschnitte zurückführen lässt, durch Verwendung der von der relativen translatorischen Position abhängigen Größe(n) auflösen. Dementsprechend kommt auch bei derartigen Ausführungsbeispielen die Eigenschaft zum Tragen, dass die zwei orthogonalen Größen des Magnetfelds zum einen von denselben Elementen erzeugt bzw. beeinflusst werden, und zum anderen von einem Magnetfeldsensor im Wesentlichen an demselben Ort erfasst werden. Die Erfassung der zwei Größen des Magnetfelds durch einen dafür geeigneten Magnetfeldsensor ermöglicht dabei eine gute Vergleichbarkeit der Messwerte der zumindest zwei orthogonalen Größen, da der Magnetfeldsensor beispielsweise mittels eines mikroelektronischen Herstellungsverfahrens (z. B. CMOS-Prozess o. ä.) mit sehr hoher Präzision gefertigt werden kann und auch externe Parameter wie Versorgungsspannung, Temperatur, etc. für den gesamten Magnetfeldsensor im Wesentlichen identisch sind.
-
Somit wird ein absoluter Winkelsensor präsentiert, der in einer Durchgangswellenkonfiguration montiert werden kann und der Winkelbereiche von bis zu mehreren Umdrehungen detektieren kann. Ein derartiger Drehwinkelsensor ist vielseitig in dem Sinne, dass er einen Sensorschaltkreis zur Erfassung von zwei oder mehr Größen eines Magnetfelds verwendet, wohingegen das magnetische Messrad und ein eventuelles Getriebe für unterschiedliche geometrische und magnetische Randbedingungen optimiert werden kann.
-
Bei einigen Ausführungsbeispielen kann der Drehwinkelsensor eine Auswerteelektronik zum Bestimmen der relativen Winkelposition und der relativen translatorischen Position aus den zumindest zwei von den Magnetfeldsensor erfassten orthogonalen Größen aufweisen. Die Auswerteelektronik kann weiterhin zum Bestimmen des absoluten Drehwinkels aus der relativen Winkelposition und der relativen translatorischen Position herangezogen werden.
-
Gemäß weiteren Ausführungsbeispielen kann die Geberanordnung zumindest vier Geberelemente umfassen, so dass die Geberanordnung in einer Umfangsrichtung zumindest zwei magnetische Perioden aufweist. Wenn die Geberanordnung ein (aktives) Multipolrad umfasst, so bedeutet dies, dass das Multipolrad zumindest zwei Nord- und zwei Südpole aufweist, die abwechselnd in einer Umfangsrichtung des Multipolrads angeordnet sind. Bei einer passiven Geberanordnung, die z. B. durch einen Backbias-Magneten angeregt wird, entspricht ein Geberelement in der Regel einem Zahn oder einer Kerbe, so dass bei den geforderten zumindest vier Geberelementen zwei Zähne und zwei Kerben vorzusehen sind. Die Anzahl der Geberelemente kann auch höher sein und beispielsweise bis zu 80 Geberelemente aufweisen (d. h. 40 Polpaare oder Zahn-Kerbe-Paare). Für viele Anwendungen bieten sich insbesondere 10 bis 60 Geberelemente (d. h. 5 bis 30 Geberelementpaare) an. Bei einer passiven Geberanordnung ist das Rad typischerweise weichmagnetisch (es hat also eine hohe relative Permeabilitätszahl).
-
Gemäß weiteren Ausführungsbeispielen kann ein Luftspalt die Geberanordnung und den Magnetfeldsensor zumindest in radialer Richtung (bezogen auf die Rotationsachse) voneinander trennen. Der Luftspalt muss somit zumindest in radialer Richtung durchquert werden, um von der Geberanordnung zu dem Magnetfeldsensor zu gelangen. Der Magnetfeldsensor kann radial außerhalb der Geberanordnung angeordnet sein oder auch radial innerhalb (bei einer kranzförmigen Geberanordnung).
-
Je nach Ausführungsbeispiel kann die translatorische Relativbewegung zwischen der Geberanordnung und dem Magnetfeldsensor in axialer Richtung, in radialer Richtung oder sowohl in axialer Richtung als auch in radialer Richtung erfolgen. Ein Übersetzungsverhältnis zwischen dem absoluten Drehwinkel und der translatorischen Relativbewegung kann vorbestimmt sein und daher für die Auswertung der von dem Magnetfeldsensor gelieferten Sensorsignale herangezogen werden.
-
Der Drehwinkelsensor kann gemäß weiteren Ausführungsbeispielen ein Getriebe umfassen, um in Abhängigkeit von dem absoluten Drehwinkel die relative translatorische Position der Geberanordnung zu dem Magnetfeldsensor zu erzeugen. Das Getriebe kann insbesondere ein Spindeltrieb, ein Schraubengetriebe, ein Spiralgetriebe, ein Exzentergetriebe, ein Pleuelgetriebe oder ein Kurbelgetriebe sein. Alternativ kann ein ohnehin bereits vorhandenes Getriebe verwendet oder angepasst werden.
-
Gemäß weiteren Ausführungsbeispielen kann der Magnetfeldsensor einen Halbleiterchip umfassen, der ein erstes Sensorelement für eine erste Größe des Magnetfelds und ein zweites Sensorelement für eine zweite Größe des Magnetfelds umfasst.
-
Bei weiteren Ausführungsbeispielen kann der Magnetfeldsensor ausgebildet sein, um ein differenzielles Messprinzip umzusetzen. Zu diesem Zweck kann der Magnetfeldsensor jeweils zwei Sensorelemente für jede zu erfassende Größe des Magnetfelds aufweisen, die beabstandet voneinander angeordnet sind. Der Abstand zwischen zwei derartigen Sensorelementen kann sich insbesondere in der Richtung einer relativen Bewegung zwischen magnetisierten Segmenten der Geberanordnung und dem Magnetfeldsensor erstrecken, beispielsweise entlang der Umfangsrichtung der relativen Drehbewegung zwischen Geberanordnung und Magnetfeldsensor. Alternativ kann der Abstand der beiden Sensorelemente auch in anderen Richtungen orientiert sein, z. B. kann ein Sensorelement näher am Magnetrad liegen und das andere weiter weg. Mit einer solchen, für ein differenzielles Messprinzip ausgelegten Anordnung kann der Drehwinkelsensor robuster gegenüber externen magnetischen Störungen gemacht werden.
-
Ausführungsbeispiele der vorliegenden Erfindung werden im Folgenden anhand der beiliegenden Figuren näher beschrieben. Es zeigen:
-
1 eine perspektivische, schematische Prinzipzeichnung eines Drehwinkelsensors gemäß Ausführungsbeispielen;
-
2 eine perspektivische, schematische Prinzipdarstellung eines Drehwinkelsensors gemäß weiteren Ausführungsbeispielen;
-
3 eine perspektivische Darstellung eines Detail-Ausschnittes von 2;
-
4 einen Funktionsgraph einer ersten Größe des Magnetfelds sowie einer translatorischen Position in Abhängigkeit von dem absoluten Drehwinkel für einen möglichen Drehwinkelsensor;
-
5 einen Funktionsgraph einer zweiten Größe des Magnetfelds sowie der translatorischen Position in Abhängigkeit von dem absoluten Drehwinkel für den selben Drehwinkelsensor, der auch der 4 zugrundeliegt;
-
6 ein schematisches Blockschaltbild zur Veranschaulichung eines möglichen Berechnungsverfahrens gemäß Ausführungsbeispielen;
-
7 ein schematisches Blockschaltbild zur Veranschaulichung eines Berechnungsverfahrens gemäß alternativen Ausführungsbeispielen;
-
8 ein schematisches Blockschaltbild zur Veranschaulichung einer optionalen Korrektur von Fehlausrichtungen;
-
9 eine schematische Draufsicht auf einen Halbleiterchip, der innerhalb eines Magnetfeldsensors eines Drehwinkelsensors gemäß Ausführungsbeispielen verwendet werden kann;
-
10 zeigt eine schematische Draufsicht eines weiteren möglichen Halbleiterchips, der innerhalb eines Magnetfeldsensors eines Drehwinkelsensors gemäß Ausführungsbeispielen verwendet werden kann;
-
11 zeigt einen Verlauf der z-Komponente des Magnetfelds in Abhängigkeit von der relativen translatorischen Position zwischen Geberanordnung und Magnetfeldsensor für verschiedene Parameter als analytische Lösung und numerisch berechnete Lösung;
-
12 einen Funktionsgraph, in dem ein Amplitudenverhältnis von zwei Größen des Magnetfelds in Abhängigkeit von der relativen translatorischen Position zwischen Geberanordnung und Magnetfeldsensor aufgetragen ist, und zwar für verschiedene Werte eines Parameters g/λ (Luftspaltbreite/magnetische Periode);
-
13 einen Funktionsgraph, in dem die Amplitude der z-Richtungskomponente des Magnetfelds über der relativen translatorischen Position aufgetragen ist, und zwar wiederum für verschiedene Werte des Parameters g/λ;
-
14 eine schematische Querschnittsansicht einer Anordnung, die einen Drehwinkelsensor gemäß Ausführungsbeispielen verwendet, um den absoluten Drehwinkel einer Welle zu messen; und
-
15 ein schematisches Flussdiagramm eines Verfahrens zur Bestimmung eines absoluten Drehwinkels gemäß Ausführungsbeispielen.
-
Bevor im Folgenden Ausführungsbeispiele anhand der beiliegenden Figuren erläutert werden, wird darauf hingewiesen, dass gleiche Elemente oder Elemente gleicher Funktion mit denselben Bezugszeichen versehen sind und dass auf eine wiederholte Beschreibung dieser Elemente verzichtet wird. Die Beschreibung von Elementen mit gleichen Bezugszeichen sind daher untereinander austauschbar. Ein Merkmal oder mehrere Merkmale eines Ausführungsbeispiels können mit einem Merkmal oder mehreren Merkmalen eines anderen Ausführungsbeispiels kombiniert werden oder durch diese ersetzt werden.
-
1 zeigt eine perspektivische, schematische Prinzipdarstellung eines Drehwinkelsensors gemäß einem oder mehreren möglichen Ausführungsbeispielen. Der Drehwinkelsensor umfasst einen Magnetfeldsensor 30 und eine Geberanordnung 20. Die Geberanordnung 20 umfasst eine Vielzahl von Geberelementen 22-1 bis 22-12. Im Ausführungsbeispiel, das in 1 dargestellt ist, entspricht jedes Geberelement 22-1 bis 22-12 einem Permanentmagneten, dessen Magnetisierungsrichtung in einer radialen Richtung der Geberanordnung 20 verläuft. Die Vielzahl der Geberelemente 22-1 bis 22-12 sind umfangsmäßig angeordnet, so dass zwei benachbarte Geberelemente entgegengesetzte Magnetisierungsrichtungen haben. Die Geberanordnung 20 ist rotationssymmetrisch zu einer Drehachse, die sich parallel zu einer z-Richtung eines Zylinderkoordinatensystems erstreckt. Typischerweise wird die Rotationsachse der Geberanordnung 20 so gewählt, dass sie mit der z-Achse des Zylinderkoordinatensystems übereinstimmt. Eine radiale Richtung des Zylinderkoordinatensystems wird mit r bezeichnet und eine tangentiale Richtung des Zylinderkoordinatensystems wird mit Ψ bezeichnet. Die Vielzahl der Geberelemente 22-1 bis 22-12 ist ringförmig bezüglich der z-Achse angeordnet, wobei ein Innendurchmesser des Rings mit r1 bezeichnet wird und ein Außendurchmesser des Rings mit r2 bezeichnet wird. Dementsprechend hat der Ring eine Dicke t = r2 – r1 in radialer Richtung. In axialer Richtung, d. h. parallel zu der z-Richtung, erstreckt sich die Geberanordnung 20 bzw. jedes Geberelement 22-1 bis 22-12 über eine Höhe w. Jeweils zwei benachbarte Geberelemente bilden ein Geberelementpaar, welches eine magnetische Periode λ definiert. In 1 ist eine derartige magnetische Periode λ gezeigt, die die Geberelemente 22-6 und 22-7 umfasst. Die magnetische Periode λ entspricht somit einem Magnetpolpaar. Die in 1 gezeigte Konfiguration weist 12 Geberelemente und dementsprechend sechs Geberpolpaare bzw. Magnetpolpaare auf. Da sich das Magnetfeld in Umfangsrichtung gemäß der magnetischen Periode periodisch wiederholt, weist die Geberanordnung sechs Sektoren von jeweils 60° auf.
-
Der Magnetfeldsensor 30 ist bei dem in 1 dargestellten Ausführungsbeispiel im Wesentlichen auf derselben Höhe in z-Richtung angeordnet, wie die Geberanordnung 20. Der Magnetfeldsensor 30 ist jedoch radial bezüglich der Geberanordnung 20 versetzt, da er radial außerhalb der Geberanordnung 20 angeordnet ist. Somit weist der Magnetfeldsensor 30 einen Abstand zu der Rotationsachse (d. h. der z-Achse) auf, der größer ist als der Radius r2 des Außenrings der Geberanordnung 20. Insbesondere ist der Magnetfeldsensor 30 von der Geberanordnung 20 durch einen Luftspalt getrennt, der eine radiale Erstreckung hat, die mit g bezeichnet wird. Der Luftspalt bzw. die Luftspaltbreite kann zum Beispiel als kleinster Abstand des Sensorelements zu den Magnetsegmenten (Geberelemente) in Magnetisierungsrichtung definiert werden.
-
Die Geberanordnung 20 ist in Abhängigkeit von dem absoluten Drehwinkel relativ zu dem Magnetfeldsensor 30 um die Rotationsachse drehbar, was durch den Pfeil 42 angedeutet ist. Weiterhin ist die Geberanordnung 20 relativ zu dem Magnetfeldsensor 30 translatorisch verschiebbar, was in 1 durch den Pfeil 44 angedeutet ist. Die translatorische Verschiebbarkeit kann beabsichtigt sein und beispielswiese durch ein geeignetes Getriebe hervorgerufen werden. Alternativ kann jedoch auch eine unbeabsichtigte translatorische Verschiebung auftreten aufgrund von Lagerspiel oder Assemblierungstoleranzen. Die relative translatorische Verschiebung zwischen Geberanordnung 20 und Magnetfeldsensor 30 erfolgt in dem dargestellten Ausführungsbeispiel in Richtung der z-Achse, d. h. in axialer Richtung. Alternativ dazu sind jedoch auch andere Formen einer translatorischen, relativen Verschiebung denkbar, wie zum Beispiel in einer bestimmten radialen Richtung. Diese bestimmte radiale Richtung kann z. B. durch den Magnetfeldsensor 30 gehen, so dass sich die Geberanordnung 20 und der Magnetfeldsensor 30 in Abhängigkeit von dem absoluten Drehwinkel relativ aufeinander zu bewegen oder voneinander wegbewegen. Für den Luftspalt zwischen der Geberanordnung 20 und dem Magnetfeldsensor 30 würde dies bedeuten, dass dessen radiale Erstreckung g sich während des Betriebs des Drehwinkelsensors in Abhängigkeit von dem absoluten Drehwinkel ändert.
-
Bei dem in 1 gezeigten Ausführungsbeispiel und bei weiteren Ausführungsbeispielen werden ein Mess(zahn)rad bzw. Zielrad (engl.: „target wheel”) und zumindest zwei Typen von magnetischen Feldsensoren verwendet, welche zwei Größen (z. B. Richtungskomponenten) des Magnetfelds detektieren. Die zwei Richtungskomponenten sind (linear) unabhängig voneinander und können insbesondere orthogonal zueinander gewählt sein. Zum Zwecke einer vereinfachten Darstellung und Erläuterung werden nachfolgend hauptsächlich multipolare permanentmagnetische Code-Räder (engl.: „code wheels”) gezeigt und beschrieben, obwohl das Prinzip auch für Geberanordnungen aus magnetisch wirksamem Werkstoff funktioniert, die derart geformt sind, dass sie das von dem Magnetfeldsensor 30 erfasste Magnetfeld in Abhängigkeit von der relativen Winkelposition und der relativen translatorische Position zwischen der Geberanordnung 20 und dem Magnetfeldsensor 30 beeinflussen. Insbesondere können weichmagnetische Räder aus Stahl, Eisen oder anderen ferromagnetischen Werkstoffen im Rahmen der Geberanordnung 20 verwendet werden, die z. B. Zähne und Kerben aufweisen. Derartige passive Geberanordnung können mit Backbias-Magneten zusammenwirken, um den Magnetfeldsensor 30 anzuregen.
-
1 kann auch folgendermaßen interpretiert werden. 1 zeigt einen üblichen Multipol-magnetischen Encoder-Ring, wie er z. B. für die Erfassung einer Radgeschwindigkeit der Automobiltechnik verwendet wird. Die Achse dieses Rings ist identisch mit der Rotationsachse, welche darüber hinaus auch die z-Achse ist. Die axiale Symmetrieebene liegt bei z = 0. Somit erstrecken sich die einzelnen Geberelemente bzw. Segmente von z = –w/2 bis z = +w/2, wobei w die axiale Breite des Rings ist. Der Ring umfasst zwei 2p Segmente (in 1 dargestellt für p = 6) der Dicke t in radialer Richtung, die an dem Umfang eines Rings mit einem Innendurchmesser 2r1 und einem Außendurchmesser 2r2 = 2r1 + 2t angeordnet sind. Jedes der Segmente ist in radialer Richtung magnetisiert, allerdings mit alternierendem Vorzeichen für benachbarte Segmente. Die magnetischen Nord- und Südpole sind durch N bzw. S gekennzeichnet. Zwischen zwei magnetisierten Regionen befindet sich ein schmaler Keil, wo das Material nicht magnetisiert ist – idealerweise ist dieser Keil von vernachlässigbarer Breite.
-
In der Praxis ist ein derartiger Code-Ring der Geberanordnung häufig an einer Stahlhalterung montiert, wie es in 2 gezeigt ist. Somit zeigt 2 ein alternatives Ausführungsbeispiel der Geberanordnung 220. Die Stahlhalterung ist dabei als Stahlhülse oder Stahlring 226 ausgeführt. Bezüglich des magnetischen Felds verhält sich die hochpermeable Stahlhülse (mit einer relativen Permeabilität von μr > 1000) wie ein magnetischer Spiegel: sie verdoppelt die Dicke der permanentmagnetisierten Segmente quasi (d. h. aus t wird 2·t). Anstelle der Stahlhalterung 226 kann auch die sich drehende Welle, deren Drehwinkel zu bestimmen ist (z. B. die Lenksäule) verwendet werden.
-
Einige Ausführungsbeispiele können auch folgendermaßen zusammengefasst werden. Ein permanentmagnetisches Multipolrad kann auf eine Welle oder auf ein mit der Welle kinematisch gekoppeltes Teil (über Gelenkwellen oder Gewinde, Kupplung, ...) montiert sein, sodass sich bei Drehung der Welle das Multipolrad zu einem Sensorchip rotatorisch und auch translatorisch bewegt (genauer: das Multipolrad hat auf einem Kreisumfang periodisch Nord- und Südpole aufgefädelt. Die Relativbewegung zwischen Multipolstreifen und Sensor verläuft so, dass es eine Bewegungskomponente in dieser Längsrichtung der Auffädelung gibt und eine Bewegungskomponente quer zur Auffädelungsrichtung und keine Bewegungskomponente (d. h. fixer Abstand = fixer Luftspalt) senkrecht zu den beiden vorgenannten Richtungen). Nennen wir die Längsrichtung der Auffädlung psi-Richtung, die dazu senkrechte Bewegungrichtung z-Richtung, dann soll der Abstand in r-Richtung vornehmlich konstant bleiben. Weiters wird aus der psi- und oder r-Komponente ein Signal gewonnen, sowie aus der z-Komponente (vorteilhaft auf psi- und/oder r-Kompoente normiert) ein weiteres Signal. Aus der Kombination beider Signale kann ein Drehwinkel ermittelt werden (diese kann ggf. auch 360° übersteigen).
-
Für die translatorische Bewegung gibt es zum Beispiel die folgenden zwei Optionen:
- 1. Die translatorische Bewegung erfolgt in Achsenrichtung.
- 2. Hier sieht das Multipolrad beispielsweise wie ein Teller aus – es ist also in axialer Richtung recht dünn. Dort könnte man die Drehbewegung der Welle über eine Spirale (z. B. eine spiralförmige Nut) mit einem Vorschub in radialer Richtung koppeln. Dann würde sich z. B. der Sensor radial von aussen nach innen oder umgekehrt bewegen. Wenn die Multipol-Segmente in einem äußeren Kreisringbereich des „Tellers” angeordnet sind, so wäre ca. in der Mitte zwischen Innen- und Aussenradius des Kreisrings die r-Komponente des Magnetfelds gleich Null. Wenn man den Sensor aus diese Mitte radial verschiebt so führt das zu einer r-Komponente die ca. linear mit der Verschiebung ansteigt und somit wieder als translatorisches Signal genutzt werden kann. Zumeist ist die Mechanik für diese radiale Bewegung aufwändiger als in der ersten Anordnung (axiale Bewegung), wobei sie aber nichtsdestotrotz möglich ist.
-
Bezüglich des Multipolrads ist anzumerken, dass mindestens zwei Nord- plus zwei Südpole (also vier Geberelemente) vorhanden sind. Vorzugsweise können 10 bis 60 Elemente vorgesehen sein, wobei vorzugsweise alle Element gleich groß sind und regelmäßig angeordnet sein sollen (üblicherweise sind sie auf einem Stahlrücken (steel-back) montiert, der nicht nur für Formstabilität sorgt, sonder durch seine magnetische Spiegelwirkung auch die Magnetstärke erhöht). Wenn ein Stahlrücken verwendet wird, so sind die Segmente typischerweise senkrecht zum Stahlrücken magnetisiert.
-
Bei einigen Ausführungsbeispielen kann vorgesehen sein, dass es keine deterministische Kupplung zwischen rotatorischer und axialer Bewegung gibt. Der Sensor detektiert wiederum zwei Komponenten, aus denen er die rotatorische und axiale Position bestimmt. Wenn die ermittelte axiale Position einen bestimmten zulässigen Bereich verlässt, kann der Sensor dies detektieren und einen Fehler melden. Entsprechende Ausführungsbeispiele wären somit sensorseitig identisch zu der weiter oben erläuterten gemeinsamen Auswertung der zwei orthogonalen Größen des Magnetfelds. Aktuatorseitig ist ein Unterschied dadurch gegeben, weil kein Schraubengetriebe o. ä. verwendet wird, sondern zum Beispiel nur eine Wellenlagerung. Der Zweck ist somit nicht die Erfassung von mehreren Umdrehungen, sondern die Fehlermeldung in einem (differentiellen) Sensorsystem mit Multipolrad, wenn die Montage zu ungenau wird. Insbesondere bei magnetoresistiven (MR) Sensoren ist es nämlich ungünstig, wenn der Sensor zu weit außerhalb der Mitte des Polstreifens/rings platziert wird. Dieser Fall könnte somit durch die Detektion einer weiteren Magnetfeldkomponente erkannt und eine Störung bzw. „Verlassen des sicheren/zuverlässigen Messbereichs” gemeldet werden.
-
3 zeigt einen Ausschnitt von 2, um die magnetische Flussdichte am Ort des Magnetfeldsensor 30 darzustellen. Die magnetische Flussdichte wird hierin mit B bezeichnet. Sie hat drei Komponenten in Zylinderkoordinaten, nämlich Bpsi, Br und Bz. Bpsi und Br sind sinusförmig bezüglich der Ψ Koordinate und mit einer Amplitude, die exponentiell gegenüber der Luftspaltbreite abnimmt und die nur geringfügig von der z-Koordinate abhängt. Zwischen Bpsi und Br existiert eine 90° Phasenverschiebung.
-
Die Richtungskomponente des Magnetfelds in axialer Richtung Bz verschwindet in der Symmetrieebene z = 0. Für z ≠ 0 ist auch Bz sinusförmig, wobei seine Amplitude im Wesentlichen linear zu der z-Koordinate ist, solange |z| < w/2 gilt. Für |z| > w/2 nimmt die Amplitude von Bz wieder ab. Daher hat die Bz-Amplitude in der Nähe von |z| = w/2 (d. h. in der Nähe von der oberen/unteren Kante des Rings) ein Maximum, welches umso deutlicher für kleine Luftspalte ist.
-
Gemäß Ausführungsbeispielen wird eine Drehbewegung des Rings 220 gegenüber dem Magnetfeldsensor 30 (oder eine Drehbewegung des Magnetfeldsensors 30 gegenüber dem Ring 220) mit einer z-Bewegung zwischen Ring und Magnetfeldsensor kombiniert. Zum Beispiel kann sich der Ring 220 entweder effektiv entlang eines Gewindepfads bzw. einer Schraubenlinie bewegen, oder der Ring dreht sich, während der Magnetfeldsensor 30 sich synchron in z-Richtung bewegt. Die (Spitzen-)Amplituden der Richtungskomponenten in radialer und tangentialer Richtung Br bzw. Bpsi hängen hauptsächlich nur von dem Luftspalt ab, wohingegen die Bz-Komponente auch von der z-Position, also der relativen translatorischen Position zwischen Geberanordnung 220 und Magnetfeldsensor 30, abhängt. Ein auf den erfassten Richtungskomponenten des Magnetfelds basierendes System zur absoluten Drehwinkelbestimmung kann nun die Amplitude der radialen magnetischen Flussdichtekomponente Br mit der Amplitude der axialen magnetischen Flussdichtekomponente Bz vergleichen. Alternativ kann auch die Amplitude der tangentialen magnetischen Flussdichtekomponente Bpsi mit der Amplitude der axialen magnetischen Flussdichtekomponente Bz verglichen werden. In beiden Fällen enthalten die zwei verwendeten Richtungskomponenten des Magnetfelds der magnetischen Flussdichte ausreichend Information bezüglich der azimuthalen und axialen Relativpositionen der Geberanordnung 220 bezüglich des Magnetfeldsensors 30. Die axiale Position ist mit der Anzahl der Umdrehungen verknüpft. Auf diese Weise kann das System nun schließlich Winkelpositionen innerhalb eines Bereichs von mehreren Umdrehungen detektieren.
-
Die Abhängigkeiten der verschiedenen Richtungskomponenten des Magnetfelds bzw. der magnetischen Flussdichte von der relativen Winkelposition und der relativen translatorischen Position können auf mathematische Weise wie folgt ausgedrückt werden. Zunächst sei angenommen, dass die relative azimuthale Position mit der relativen axialen Position z. B. aufgrund eines entsprechenden Getriebes (z. B. Spindeltrieb oder Gewindebuchse) verknüpft ist, so dass gilt: z = ΔzΨ/(2π)
-
Ein relativ einfaches Getriebe, mit dem eine derartige Bewegung erzielt werden kann, ist eine Welle, deren Lager ein Feingewinde (Gewinde mit geringer Ganghöhe) ist, das die Welle auf definierte Weise in axialer Richtung bewegt, sobald sie gedreht wird. In manchen Ausführungsbeispielen ist die Geberanordnung drehfest und translatorisch fest mit der Welle verbunden, so dass bei einer Drehung im Uhrzeigersinn das Gewinde den Code-Ring der Geberanordnung z. B. in positive z-Richtung drückt, wohingegen bei einer Drehung entgegen dem Uhrzeigersinn der Code-Ring in negative z-Richtung gedrückt wird. Wird nun noch als Referenzposition festgelegt, dass bei einem absoluten Drehwinkel Ψ = 0 die Geberanordnung symmetrisch zur axialen Symmetrieebene ist, d. h. sich bei z = 0 befindet, so ergibt sich für eine Ganghöhe Δz des Gewindes und für einen Drehwinkel Ψ = π/2 eine axiale Position von z = Δz/4. Bei Ψ = π ist z = Δz/2, bei Ψ = 2π ist z = Δz, bei Ψ = 4π ist z = 2Δz, bei Ψ = 6π ist z = 3Δz usw.
-
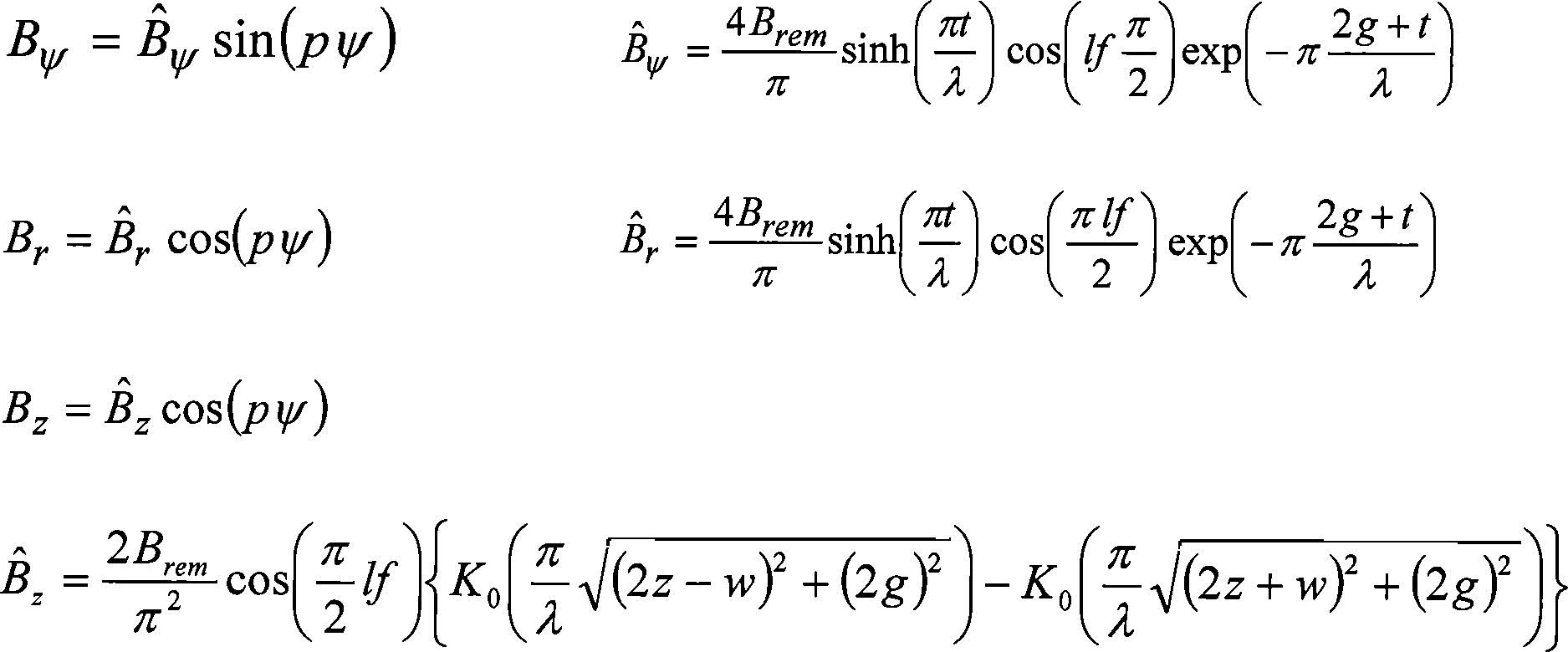
Die Richtungskomponenten des Magnetfelds bzw. der magnetischen Flussdichte bzw. der magnetischen Induktion sind, ausgedrückt in Zylinderkoordinaten:
wobei B
rem die Remanenz der permanentmagnetisierten Segmente, p die Anzahl der Polpaare, r der Leseradius (d. h. die Distanz zwischen dem Sensorelement
30 von der Rotationsachse), λ die magnetische Periode des Polrads
220 (= 2πr/p), lf die Prozentzahl des nicht-magnetisierten Volumens innerhalb des Rings (exklusive Stahlrücken), g der Luftspalt bzw. dessen Breite und K
0 die modifizierte Bessel-Funktion ist. Der Artikel „Closed Analytical Formulae for Multi-pole Magnetic Rings” von U. Ausserlechner, erschienen in: Progress In Electromagnetics Research B, Vol. 38, 71–105, 2012 enthält auf Seiten 89 und 90 eine Herleitung der oben angegebenen analytischen Lösung für die Amplitude der axialen Magnetfeldamplitude B
z.
-
Man kann sehen, dass Br und Bz in Phase sind, wohingegen Bpsi in Quadratur dazu ist. Weiterhin sind die Amplituden B ^
ψ = B ^
r identisch. Wenn die Sensorelemente nicht zu nahe an der Kante des Code-Rads sind und |z| < w/2, kann die Bessel-Funktion K
0 durch eine Exponentialfunktion angenähert werden. Dementsprechend lässt sich die axiale Magnetfeldkomponente wie folgt ausdrücken:
welche zeigt, dass die Bz-Amplitude linear proportional zu der z-Koordinate ist und exponentiell mit dem Luftspalt bzw. dessen Breite abfällt. Die Genauigkeit kann verbessert werden durch Bereitstellung von Wertetabellen („look-up tables”) oder Interpolationsfunktionen f() für die Relation von z = f(B ^
z/B ^
ψ) oder auch die Relation z = f(B ^
z/B ^
r). Das System kann dann fortfahren mit der Berechnung von ψ mittels einer Beziehung ψ = f(B ^
z/B ^
ψ)2π/Δ
z. Dieses Resultat kann sodann verglichen werden gegenüber einem regelmäßigen Raster mit Intervallen 360°/p.
-
4 zeigt als Beispiel (für eine spezielle Anordnung) einen Verlauf des tangentialen Magnetfelds bzw. der tangentialen magnetischen Flussdichte Bψ in einem Winkelbereich von –900° bis +900°. Die magnetische Flussdichte ist in Tesla ausgedrückt und ergibt sich aus der linken Skala in 4. Dementsprechend erreicht die magnetische Flussdichte in tangentialer Richtung einen Spitzenwert von B ^ψ = 0,016 T. Für die Zwecke der Illustration wurde angenommen, dass die Geberanordnung p = 4 Polpaare aufweist, so dass auf eine volle Umdrehung vier Sinusperioden kommen. Die relative z-Position zwischen der Geberanordnung und dem Magnetfeldsensor ist in 4 als gestrichelte Linie dargestellt, für die die rechte Skala mit der Einheit Meter gültig ist. Innerhalb einer Umdrehung ändert sich die z-Position um 0,001 m = 1 mm. Selbstverständlich sind auch andere Werte für die Parameter p und Δz denkbar. 4 zeigt deutlich, dass zumindest für relativ kleine translatorische Verschiebungen zwischen der Geberanordnung und dem Magnetfeldsensor (typischerweise bis zu einer axialen Erstreckung der Geberanordnung) die tangentiale Magnetfeldkomponente Bpsi nicht von der z-Position abhängt. Bei realen Anordnungen kann zumindest erreicht werden, dass die tangentiale Magnetfeldkomponente in nur sehr geringem Maße von der z-Position abhängt.
-
5 zeigt eine ähnliche Darstellung wie 4, jedoch für die axiale Magnetfeldkomponente Bz. Es ist erkennbar, dass, ausgehend von der Mittelstellung für Ψ = 0 und z = 0 die Extremwerte im Wesentlichen linear mit zunehmenden Abstand von der Mitte zunehmen. An den Rändern des Winkelbereichs bei –900° bzw. +900°, wo Bz am größten ist, erreicht Bz einen Wert von 0,018 T, also etwas mehr als die Amplitude der tangentialen bzw. radialen Richtungskomponenten Bpsi bzw. Br. Die relativ starke Abhängigkeit der Bz-Richtungskomponente von der z-Position kann für die Zwecke der absoluten Drehwinkelbestimmung zweckmäßig genutzt werden.
-
Der Drehwinkelsensor gestattet es, den gemessenen Wert für die tangentiale Richtungskomponente des Magnetfelds bzw. der magnetischen Flussdichte Bψ mit dem (bekannten) Maximalamplitudenwert B ^ψ zu vergleichen, um daraus den relativen Drehwinkel ψ bis zu einem (Ganzzahl-)Mehrfachen von 360°/p abzuleiten. Ebenso ist es möglich, den gemessenen Wert für die radiale Richtungskomponente Br mit dem (bekannten) Maximalamplitudenwert B ^r zu vergleichen. Weiterhin kann Bψ mit Br verglichen werden, z. B. mittels des bekannten CORDIC-Algorithmus. Anschließend kann B ^z mit B ^Ψ = B ^r verglichen werden. Auf diese Weise kürzt sich die Remanenz Brem heraus: daher ist das System robust gegen eine Variation bzw. Drift der Stärke der Magneten. Obwohl die Terme in den Gleichungen für die drei Richtungskomponenten des Magnetfelds BΨ, Br und Bz, welche den Luftspalt g und die axiale Breite des Polrads bzw. der Geberanordnung w enthalten, nicht perfekt identisch sind, so sind sie doch ausreichend ähnlich, dass das Messsystem die z-Koordinate mit annehmbarer Genauigkeit bestimmen kann.
-
Bei dem schematischen Blockschaltbild von 6 werden von dem Magnetfeldsensor 30 die drei Richtungskomponenten Br Bpsi und Bz für die weitere Berechnung bereitgestellt, was im Rahmen von 6 durch die Blöcke 62, 63 bzw. 64 dargestellt ist. Obwohl es typischerweise vorteilhaft für die Auswertung ist, ist es nicht unbedingt notwendig, dass sowohl die radiale Richtungskomponente Br als auch die tangentiale Richtungskomponente Bpsi von dem Magnetfeldsensor 30 erfasst und für die weitere Berechnung bereitgestellt wird. Die radiale Richtungskomponente Br und die tangentiale Richtungskomponente Bpsi werden einem Berechnungsblock 65 zugeführt, der für eine Berechnung der relativen Winkelposition zwischen der Geberanordnung und dem Magnetfeldsensor innerhalb eines kleinen Bereichs, nämlich typischerweise innerhalb einer magnetischen Periode verwendet wird. Zu diesem Zweck kann der CORDIC-Algorithmus verwendet werden. Die Abkürzung CORDIC steht dabei für „COordinate Rotation DIgital Computer”. Die Werte für die radiale und tangentiale Richtungskomponente Br und Bpsi werden auch an einen weiteren Berechnungsblock 66 übermittelt, der für die Berechnung der relativen translatorischen Position zwischen Geberanordnung und Magnetfeldsensor verwendet wird, hier die von dem absoluten Drehwinkel abhängige z-Position der Geberanordnung. Zusätzlich zu Br und Bpsi wird auch die axiale Richtungskomponente des Magnetfelds bzw. der magnetischen Flussdichte Bz als Eingangsgröße für den Berechnungsblock 66 verwendet. Auch hier kann ein CORDIC-Algorithmus verwendet werden. Die Ergebnisse der Berechnungsblöcke 65 und 66 werden als Eingangsgrößen für einen weiteren Berechnungsblock 67 verwendet, der den feinen, relativen Drehwinkelwert psi und den im Berechnungsblock 66 ermittelten Wert für die z-Position der Geberanordnung kombiniert, um daraus einen Großbereichswert für den Drehwinkel psi, d. h. den absoluten Drehwinkel zu bestimmten. Weiterhin kann auch eine Extraktion der Umdrehung im Rahmen des Berechnungsblocks 67 erfolgen. Die Kombination des feinen psi-Werts und der z-Position kann insbesondere auf eine bekannte mechanische Verknüpfung zwischen diesen beiden Größen zurückgreifen, die z. B. von einem Getriebe (Spindelgetriebe, Kurbelgetriebe, Zahnstangengetriebe, etc.) in Form des Parameters Δz vorgegeben ist.
-
Das in 7 dargestellte schematische Blockschaltbild ist ähnlich zu dem Blockschaltbild von 6. Ein Unterschied besteht darin, dass die radialen und tangentialen Richtungskomponenten Br und Bpsi nicht dem Berechnungsblock für die Berechnung der z-Position der Geberanordnung gegenüber dem Magnetfeldsensor zugeführt werden. Stattdessen gibt ein modifizierter Berechnungsblock 75 für die feine psi-Berechnung den ermittelten Wert für die relative Winkelposition, also den feinen psi-Wert an einen modifizierten Berechnungsblock für die z-Position 76. Wiederum kann sowohl im Rahmen des Berechnungsblocks 75 als auch des Berechnungsblocks 76 ein CORDIC-Algorithmus zur Anwendung kommen. Wie in dem Blockschaltbild von 6 werden die Resultate der Berechnungsblöcke 75, 76 an den weiteren Berechnungsblock 67 weitergegeben, welcher den Großbereichswert für psi, also z. B. den absoluten Drehwinkel aus diesen Eingangsgrößen ermittelt.
-
8 zeigt ein schematisches Blockschaltbild zur Korrektur von eventuellen Fehlausrichtungen zwischen den einzelnen Komponenten des Drehwinkelsensors oder auch zum Ausgleich von eventuellen Fertigungstoleranzen, z. B. im Hinblick auf die Breite g des Luftspalts zwischen der Geberanordnung und dem Magnetfeldsensor. Auf diese Weise kann das Sensorsystem verbessert werden, wenn es Fehlausrichtungen und/oder Fertigungstoleranzen des Sensormoduls berücksichtigt. Wenn der Sensor beispielsweise schräg im Raum gegenüber der Rotationsachse angeordnet ist, kann es günstig sein, eine Koordinatendrehung vor der in den 6 und 7 gezeigten Signalverarbeitung durchzuführen. Bei einer schrägen bzw. geneigten Ausrichtung des Magnetfeldsensors gegenüber der Rotationsachse detektieren die drei Sensorelemente des Magnetfeldsensors nicht die tatsächlichen radialen, tangentialen und axialen Richtungskomponenten des Magnetfelds bzw. der magnetischen Flussdichte, sondern Richtungskomponenten, die gegenüber den tatsächlichen Richtungskomponenten verdreht sind und hier mit Br', Bpsi' und Bz' bezeichnet werden. In 8 sind diese tatsächlich von dem Magnetfeldsensor 30 detektierten Richtungskomponenten in entsprechenden Blöcken 82, 83, 84 des schematischen Blockschaltbilds dargestellt. Ein Signalverarbeitungsblock 88 korrigiert diese Fehlausrichtungen durch Multiplizieren des Vektors (Br', Bpsi', Bz') mit einer Matrix. Wenn die Determinante dieser Matrix gleich 1 ist, wird eine echte Drehung im Raum durchgeführt. Es kann jedoch auch günstig sein, einige Feldkomponenten zu skalieren, dann ist die Determinante ungleich 1. Die Ausgabe der Matrixmultiplikation ist ein korrigierter Feldvektor {Br, Bpsi, Bz}, der wie der Eingabevektor in den 6 und 7 verwendet werden kann. Zu diesem Zweck werden die korrigierten Werte Br, Bpsi und Bz wieder in den Blöcken 62, 63, 64 bereitgestellt, wo sie von den Berechnungen 65, 66 bzw. 75, 76 der 6 bzw. 7 abgerufen werden können.
-
Wenn mit dem Drehwinkelsensor gemäß Ausführungsbeispielen z. B. fünf Umdrehungen detektiert werden sollen, ist es günstig, die axiale Höhe der Geberanordnung drei- bis siebenmal so groß zu wählen, wie die translatorische Verschiebung pro Umdrehung, d. h. w = 3Δz ... 7Δz. Dann ist der Gesamthub der axialen Bewegung in etwa gleich zu der Breite des Code-Rads bzw. der Geberanordnung und somit variiert das Bz-Feld nahezu linear mit der z-Position und folglich mit der Anzahl der Umdrehungen. Wenn dagegen lediglich eine Umdrehung detektiert werden soll, d. h. ein absoluter Winkelbereich von 360°, kann das vorgeschlagene System immer noch zweckmäßig verwendet werden und in diesem Fall wird die axiale Höhe der Geberanordnung w = Δz ... 1, 4Δz gewählt.
-
Die Anzahl p der Polpaare des Code-Rads bzw. der Geberanordnung sollte so gewählt werden, dass eine axiale Bewegung von Δz/p groß genug ist, um mit ausreichender Zuverlässigkeit durch das Sensorsystem detektiert zu werden. In diesem Fall wird die Winkelauflösung von 360°/p durch Vergleichen der Bz-Komponente mit den anderen Komponenten (Br, Bpsi) erreicht, während eine feinere Auflösung durch sinusförmige Interpolation der anderen Komponenten (Br, Bpsi) erreicht werden kann.
-
Einige Systeme sind darauf angewiesen, die Amplitude der Feldmuster zu schätzen. Eine relativ einfache Möglichkeit dies zu tun besteht darin, das Feldmuster während einer gewissen Zeit zu beobachten, in welcher das Rad bzw. die Geberanordnung relativ zu dem Magnetfeldsensor (oder der Magnetfeldsensor relativ zu der Geberanordnung) rotiert, und zwar zumindest über einen Winkel von psi = 360°/p. Für Systeme, welche bei einer konstant hohen Geschwindigkeit arbeiten, ist dies eine gangbare Option.
-
Für Systeme, bei denen die Welle für eine relativ lange Zeit ruhen kann und das System dennoch die Winkelposition der Welle kennen bzw. bestimmen muss (z. B. Lenkwinkelsensor), muss ein Sensorsystem verwendet werden, das die Amplituden unmittelbar ohne irgendeine Bewegung des Rads bzw. der Welle ableiten bzw. bestimmen kann (d. h. echte Einschalt-Funktionalität bzw. „power-on functionality”).
-
Eine Möglichkeit, dies zu erreichen, besteht darin, zwei Sensorelemente desselben Typs (d. h. für dieselbe Richtungskomponente des Magnetfelds) beabstandet zueinander anzuordnen, z. B. in einem Abstand von λ/4 (d. h. ein Viertel der magnetischen Periode). Die zwei Sensorelemente können entweder auf zwei getrennten Halbleiterchips vorgesehen sein oder auf einem einzigen Halbleiterchip. Die zwei Sensorsignale, die von dem zueinander beabstandeten Sensorelementen geliefert werden, sind phasenverschoben um 90°, und zwar in der Richtung, in welcher sich die magnetische Periode erstreckt. Wenn eines der beiden Signale definitionsgemäß als Sinuswelle repräsentiert wird, ist das andere Signal eine Kosinuswelle. Die Amplitude kann nun durch pythagoreische Addition ermittelt werden, d. h. durch Quadrieren jedes Sensorsignals, Aufsummieren der Quadrate und Bestimmen der Quadratwurzel des Summenergebnisses.
-
Andere Systeme müssen die Amplitude nicht extrahieren. Stattdessen werden Momentanwerte der tangentialen Richtungskomponente Bψ und der radialen Richtungskomponente Br verglichen. Vorzugsweise werden die tangentiale und radiale Richtungskomponente Bψ und Br im Wesentlichen am selben Ort auf einem Halbleiterchip gemessen, den der Magnetfeldsensor für die Bestimmung der Richtungskomponenten des Magnetfelds aufweist, sofern es möglich ist, die zwei grundlegenden Sensorelemente möglichst nahe zueinander auf dem Halbleiterchip anzuordnen. Die zwei Komponenten Bψ und Br verhalten sich wie Sinus und Kosinus und können einem CORDIC-Algorithmus zugeführt werden, um die Winkelposition psi zu berechnen (mit einem unbekannten ganzzahligen Vielfachen von 360°/p).
-
Um das System robuster gegenüber externer magnetischer Störung zu machen, kann ein differenzielles Messprinzip verwendet werden. Zu diesem Zweck sind zwei Sensorelemente für jede Richtungskomponente, die detektiert werden soll (typischerweise zwei Richtungskomponenten oder drei Richtungskomponenten), vorhanden. Die zwei Sensorelemente befinden sich in einem bestimmten Abstand s (s für englisch: „spacing”), der zum Beispiel in der Richtung der relativen Bewegung zwischen magnetisierten Segmenten und dem Sensor ausgerichtet ist. Da die axiale Bewegung Δz pro Umdrehung klein ist verglichen mit der Bewegung in tangentialer Richtung entlang des Umfangs des Rads bzw. der Geberanordnung, erstreckt sich der Abstand s typischerweise ebenfalls tangential zu dem Radumfang. Wenn nun eine Magnetfeldkomponente ein Muster gemäß sin(2πrψ/λ) aufweist, detektiert das erste Sensorelement sin(2π(rψ – s/2)/λ) und das zweite Sensorelement detektiert sin(2π(rψ + s/2)/λ). Die Subtraktion dieser von den zwei Sensorelementen detektierten Signale ergibt 2sin(πs/λ)cos(2πrψ/λ). Dies bedeutet, dass das größte differenzielle Signal für 2 s = λ erhalten wird. Allerdings ist der Term sin(πs/λ) selbst für einen etwas kleineren Abstand s (z. B. (3 ... 4) s = λ) nicht zu klein, d. h. ausreichend groß.
-
Für 4 s = λ ergibt sich z. B. sin(πs/λ) = 0,71, was bedeutet, dass man 29% des maximal verfügbaren Signals verloren hat, welches für 2 s = λ zu erreichen wäre. Ein geringerer Abstand s zwischen den Sensorelementen hilft jedoch dabei, Chipgröße einzusparen, da in der Praxis häufig ein großes λ, aber auch ein kleiner Abstand s (was eine geringe erforderliche Größe des Halbleiterchips bedeutet) gewünscht wird. Das differenzielle Messprinzip macht es möglich, dass sich ein homogenes magnetisches Hintergrundfeld bei den Berechnungen herauskürzt bzw. rechnerisch aufhebt, was die Winkelbestimmung robust gegenüber magnetischen Störungen macht.
-
9 zeigt als schematische, nicht maßstäbliche Draufsicht ein Layout des Halbleiterchips 32 des Magnetfeldsensors 30. In dem Halbleiterchip 32 oder an dessen Oberfläche sind zwei Gruppen von Sensorelementen angeordnet. Die linke Gruppe umfasst drei Sensorelementen, von denen das Sensorelement 1a ein erster Sensortyp zum Detektieren von Br-Komponenten, das Sensorelement 2a ein zweiter Sensortyp zum Detektieren von Bpsi-Komponenten und das Sensorelement 3a ein dritter Sensortyp zum Detektieren von Bz-Komponenten ist. In einem Abstand s befindet sich die rechte Gruppe von wiederum drei Sensorelementen, von denen das Sensorelement 1b ein erster Sensortyp zum Detektieren von Br-Komponenten, das Sensorelement 2b ein zweiter Sensortyp zum Detektieren von Bpsi-Komponenten und das Sensorelement 3b ein dritter Sensortyp zum Detektieren von Bz-Komponenten ist. Der Abstand der drei Sensortypen sollte in vertikaler Richtung (bezogen auf die Darstellung von 9) möglichst klein sein.
-
Die unterschiedlichen Sensortypelemente können auch in horizontaler Richtung (x-Richtung bzw. psi-Richtung) verschoben sein, wie in 10 schematisch dargestellt. Die linke Gruppe von Sensorelementen umfasst dabei zwei Sensorelemente 1a und 2a, die beispielsweise zum Detektieren der Br-Komponente, bzw. der Bz-Komponente geeignet sind. Die rechte Gruppe von Sensorelementen umfasst ebenfalls zwei Sensorelemente 1b und 2b, die auf dieselben Magnetfeldkomponenten reagieren, also z. B. Br bzw. Bz. Der Abstand zwischen den Sensorelementen 1a und 1b wird dabei typischerweise in etwas genauso groß gewählt wie der Abstand der Sensorelemente 2a und 2b. Es ist jedoch auch möglich, dass die verschiedenen Typen von Sensorelementen in einer verschachtelten Weise in dem Halbleiterchip 32 bzw. an dessen Oberfläche angeordnet sind, so dass z. B. die Sensorelemente 2a und 2b einen geringeren Abstand voneinander aufweisen, als die Sensorelemente 1a und 1b. Die unterschiedlichen Abstände können nachfolgend bei der Auswertung der ermittelten Magnetfeldwerte berücksichtigt werden. [Frage an Erfinder: In der Erfindungsmeldung scheint es einen Widerspruch zu geben zwischen dem Text auf Seite 7, wonach es vorteilhaft ist, „that the spacing between 1a–1b is equal to the spacing of 2a–2b” und der nachfolgenden Figur. Insbesondere sind in der rechten Gruppe das Sensorelement 2b links, bzw. weiter innen, angeordnet und das Sensorelement 1b rechts, bzw. weiter außen. In der 10 des vorliegenden Anmeldungsentwurfs haben wir die Bezugszeichen ausgetauscht, so dass es mit dem Text übereinstimmt. Bei Bedarf bitte entsprechende Information an uns zwecks Korrektur der Figur bzw. des Textes.] Bei einer verschachtelten Anordnung haben beide Sensorelementpaare den selben Schwerpunkt, aber der Faktor sin(Π·s/λ) ist unterschiedlich, wobei letzteres kalibriert (und somit korrigiert) werden kann. Bei einer zueinander versetzten Anordnung, zum Beispiel um λ/4 kann bei Messung von Bpsi und Br die Amplitude sofort beim Einschalten durch die Summe der Betragsquadrate gebildet werden.
-
Gemäß Ausführungsbeispielen kann ein Code-Rad an einer drehbaren Welle und ein Sensor in der Nähe dazu platziert werden, wobei die Drehung mit einer relativen translatorischen Bewegung zwischen Sensor und Welle bzw. Code-Rad verknüpft ist. Der Sensor weist magnetische Sensorelemente (auf ein Magnetfeld reagierende Sensorelemente) auf, die zumindest zwei (oder drei) unabhängige Magnetfeldkomponenten Br, Bz oder Bpsi, Bz oder Br, Bpsi, Bz detektieren. Ein Algorithmus verwendet zumindest zwei Komponenten (Br, Bz oder Bpsi, Bz), um die relative translatorische Position daraus abzuleiten bzw. zu ermitteln, und zumindest eine Komponente (Br, Bpsi, oder beide), um eine Rotationsposition bzw. relative Winkelposition zwischen Code-Rad und Sensor zu ermitteln. Die Kombination von translatorischer Position und Rotationsposition gibt eine eindeutige Rotationsposition in einem größeren (Winkel-)Bereich, als es nur mit den Magnetfeldkomponenten Br, Bpsi alleine erreicht werden könnte.
-
Bei einigen Ausführungsbeispielen werden differenzielle Sensoren verwendet, wobei ein Sensortyp eine erste Magnetfeldkomponente erfasst und ein zweiter Sensortyp eine zweite Magnetfeldkomponente erfasst. Dabei sind zwei Sensorelemente von jedem Typ mit einem Abstand von zumindest 0,5 mm (ggf. auch mindestens 1 mm oder mindestens 2 mm oder mindestens 3 mm) voneinander platziert.
-
11 zeigt eine Grafik, in der die Amplitude B ^z in Abhängigkeit von der z-Position dargestellt wird. Die zugrundeliegende Anordnung ist beispielsweise in 2 schematisch dargestellt. Somit zeigt 11 die Abhängigkeit des BZ-Felds eines multipolaren Streifens bzw. eines Multipol-Rads von der translatorischen Position (hier die z-Position der Geberanordnung). Die weiter oben in Form von Gleichungen angegebene analytische Lösung ist in 11 in Form von durchgezogenen Linien für verschiedene Parameterwerte für die Luftspaltbreite g angegeben. Daneben zeigt 11 auch numerische Lösungen für dieselben Parameterwerte, die mithilfe einer Finite-Elementen-Simulation (FEM) ermittelt wurden. Ein Vergleich der analytischen Lösungen mit den Finite-Elementen-Simulationen zeigt eine gute Übereinstimmung für alle berücksichtigten Luftspaltbreiten g und alle z-Positionen, selbst über die Kante des Encoder-Rings bzw. der Geberanordnung 220 hinaus. Folgende Randbedingungen wurden angenommen: Remanenz = 500 mT, Koerzivität Hcb = 355 kA/m, λ = 4 mm, w = 6,6 mm, t = 2,4 mm, mit Stahlrücken. Wie in 11 zu sehen ist, wird das maximale Bz-Feld an der Kante des Streifens bzw. des Code-Rads erzielt, d. h. bei einer z-Position von z = w/2.
-
Im Folgenden wird die Dimensionierung eines Drehwinkelsensors behandelt. Es wird ein Abstand s = 3 mm zwischen Sensorelementen gewählt, die auf dieselbe Magnetfeldkomponente ansprechen, da dies in etwas der größte Abstand ist, der auf einem Halbleiterchip von gewöhnlicher Größe (ungefähr 6 mm2) untergebracht werden kann. Der Chip hat z. B. eine Größe von 3,3 mm × 1,8 mm. An einer Seite, die zum Zwecke der Orientierung als linke Seite bezeichnet werden soll, werden Sensorelemente für Bpsi, Br und Bz platziert. In einem Abstand von 3 mm werden zusätzliche Sensorelemente für Bpsi, Br und Bz weiter rechts bzw. in der Nähe von einer rechten Seite des Halbleiterchips platziert. Das System wertet den Unterschied zwischen entsprechenden linken und rechten Sensorelementen aus, was die drei differenziellen Feldkomponenten dBpsi = Bpsi(links) – Bpsi(rechts), dBr = Br(links) – Br(rechts) und dBz = Bz(links) – Bz(rechts) ergibt.
-
Wenn der Abstand s so gewählt wird, dass 4 s = λ, scheint ein guter Kompromiss zwischen Chipgröße und Stärke des differenziellen Signals erreicht zu werden. Somit ergibt sich als Wert für die magnetische Periode λ = 12 mm.
-
Es wird nun angenommen, dass ein Raum von 30 mm Durchmesser verfügbar ist für den magnetischen Code-Ring bzw. die Geberanordnung. Dies ergibt einen Umfang von 94 mm, welcher p = 8 Polpaare mit λ = 11,78 mm aufnehmen kann. Der oben erwähnte Wert sin(πs/λ) ist in diesem Fall sin(πs/λ) = 0,72.
-
Wenn nun die Höhe der Geberanordnung w = 5 mm gewählt wird, ist das Verhältnis von Bz/Br ein gutes Maß für die z-Koordinate. Dieser Zusammenhang ist in 12 grafisch dargestellt für verschiedene Parameterwerte des Parameters g/λ, d. h. das Verhältnis von Luftspaltbreite g zu magnetischer Periode λ. Die Abszisse des Funktionsgraphen in 12 zeigt die relative Exzentrizität, d. h. die z-Position der Geberanordnung bezogen auf eine Nullstellung bzw. Referenzstellung im Verhältnis zu der halben Höhe w/2 der Geberanordnung. Die Ordinate zeigt das Verhältnis der Amplituden der z-Komponente zur r-Komponente des Magnetfelds. 12 zeigt, dass für die Nullstellung der Geberanordnung bei z = 0 in der Mittelebene bzw. der Symmetrieebene des Rings das Verhältnis Bz/Br im Wesentlichen 0 ist. Der Funktionsgraph in 12 zeigt lediglich die positive z-Werte, wobei jedoch bei negativen z-Werten die Funktionen ungerade sind, d. h. f(–x) = –f(x). Es kann gesehen werden, dass für bestimmte Luftspaltbreiten g die Kurven nahezu linear sind für |z| < w/2 ... w, d. h. in einem relativ breiten Bereich. Eine Bedingung ist, dass der Luftspalt nicht zu klein sein darf, da für einen kleinen Luftspalt die Kurven eine starke Krümmung zeigen (was die Auswertung schwieriger macht, aber nichtsdestotrotz möglich ist). Als Beispiel für eine gute Wahl des Verhältnisses von Luftspaltbreite g zu magnetischer Periode λ sei hier g/λ = 0,33 angegeben.
-
13 zeigt das Bz-Feld in absoluten Einheiten, nämlich mT. Die Remanenz Brem des permanentmagnetischen Code-Rings ist bei 500 mT angenommen und seine relative Permeabilität ist μr = 1,17. Ein Vergleich von 12 und 13 zeigt, dass das Bz-Feld linearer ist als das Verhältnis Bz/Br oder Bz/Bpsi. Daher könnte ein Algorithmus die Br-Komponente und/oder die Bpsi-Komponente separat verwenden, um den Luftspalt zu bestimmen, und dann aus Bz auf die z-Koordinate zu schließen.
-
Bei manchen Ausführungsbeispielen kann ein Drehwinkelsensor ein Getriebe bzw. einen Mechanismus umfassen, der anhand des absoluten Drehwinkels die relative translatorische Position erzeugt. Diese Art der Drehwinkelerfassung ist insbesondere nützlich in Anwendungen, bei denen Präzisionsmechanismen hinsichtlich der Position durch z. B. ein Handrad oder einen Schrittmotor bewegt werden, da dann die Quelle der Bewegung eine Drehung ist und diese in eine Hin- und Herbewegung transformiert wird.
-
In 14 ist ein möglicher Getriebemechanismus und ein Drehwinkelsensor gemäß Ausführungsbeispielen in einer schematischen Schnittdarstellung abgebildet. Die Aufgabe des Drehwinkelsensors ist es, den absoluten Drehwinkel einer Welle 80 zu erfassen, die z. B. eine Lenksäule sein könnte. Der zu erfassende absolute Drehwinkel kann sich dabei ggf. innerhalb eines Drehwinkelbereichs ändern, der mehr als eine volle Umdrehung, d. h. mehr als 360° umfasst. Die Welle 80 ist an ihrem in 14 dargestellten Ende mittels eines Lagerbocks 90, einem Lager 94 und einer Gewindeanordnung gelagert. Zu der Gewindeanordnung gehört ein Außengewinde 82 der Welle 80 und ein entsprechendes Innengewinde 92, das in dem Lagerbock 90 ausgeführt ist. Alternativ kann auch eine Gewindebuchse vorgesehen sein, die drehfest mit dem Lagerbock 90 verbunden ist und ein Innengewinde zum Zusammenwirken mit dem Außengewinde 82 der Welle 80 aufweist. Das Lager 94 kann ein Sinterlager sein, da ein derartiges Lager sowohl eine Drehbewegung wie auch eine axiale Bewegung zulässt und darüber hinaus kostengünstig ist. Aufgrund des Zusammenwirkens des Außengewindes 82 mit dem Innengewinde 92 bewegt sich die Welle 80 auf und ab, wenn sie sich dreht. Bei einer Lenksäule ist eine derartige Auf- und Abbewegung der Welle 80 für den Bediener so gut wie nicht wahrnehmbar, wenn sie nur in einem geringen Maße durchgeführt wird. Zum Beispiel kann das von dem Außen- und Innengewinde 82, 92 gebildete Gewinde eine Gewindehöhe von 1 mm oder 2 mm aufweisen, so dass sich bei fünf möglichen Umdrehungen der Welle 80 diese um 5 m axial verschiebt. Zwischen dem Außengewinde 82 und dem Innengewinde 92 ist meistens ein geringes Spiel des Gewindegangs vorhanden. Dieses Spiel kann z. B. durch eine Federbeaufschlagung minimiert werden. Weiterhin kann der Abstand zwischen dem Gewindeende und dem Sinterlager 94 relativ groß gewählt werden. Das radiale Spiel des Sinterlagers 94 ist klein (verglichen mit dem Spiel des Gewindeendes). Daher sollte das Messrad der Geberanordnung 20 näher an dem Sinterlager 94 bzw. den Sinterlagern angeordnet sein, als zu dem Gewindeende.
-
Wenn eine Verschiebung der Welle 80 in axialer Richtung nicht erwünscht ist, kann die Geberanordnung eine Hülse umfassen, die beispielsweise durch Formschluss, Kraftschluss oder Reibschluss fest mit der Welle 80 verbunden ist. Das eigentliche Code-Rad bzw. Multipolrad kann dann beispielsweise durch eine Verzahnung oder eine Nut-/Federanordnung drehfest, jedoch axial verschiebbar gegenüber der Hülse und somit gegenüber der Welle 80 sein. Das Code-Rad kann dann ein Innen- oder Außengewinde aufweisen, das mit einem entsprechenden Gegengewinde wechselwirkt, welches fest mit dem Lagerbock 90 verbunden ist.
-
Neben einer translatorischen Relativbewegung zwischen Geberanordnung 20 und Magnetfeldsensor 30 in axialer Richtung kann alternativ oder zusätzlich eine Relativbewegung in radialer Richtung implementiert werden. Zu diesem Zweck kann die Geberanordnung 20 radial verschiebbar bezüglich der Welle 80 angeordnet sein. Die radiale Relativbewegung kann z. B. über einen fest mit der Geberanordnung 20 verbundenen Führungsstift erfolgen, der in eine bezüglich des Lagerbocks 90 ortsfeste, spiralförmige Nut eingreift. Auf diese Weise kann die Luftspaltbreite in radialer Richtung in Abhängigkeit von dem absoluten Drehwinkel verändert werden, was sich auf das von dem Magnetfeldsensor 30 erfasste Magnetfeld auswirkt. Eine andere Möglichkeit für eine relative radiale Bewegung zwischen Geberanordnung 20 und Magnetfeldsensor 30 wird durch einen Zahnrad/Zahnstangen-Mechanismus bereitgestellt. Die Geberanordnung kann ein Zahnrad umfassen, das drehfest bezüglich der Welle 80 ist. Somit entspricht die Winkelstellung des Zahnrads dem absoluten Drehwinkel. Das Zahnrad kann mit einer Zahnstange zusammenwirken, die parallel zu einer radialen Richtung bezüglich der Drehachse der Welle 80 verläuft und entlang dieser Richtung verschiebbar ist. Auf diese Weise wird der absolute Drehwinkel in eine lineare Position der Zahnstange umgewandelt. Der Magnetfeldsensor 30 kann mittelbar oder unmittelbar mit der Zahnstange verbunden sein, so dass der Magnetfeldsensor 30 die von der Zahnstange ausgeführte Längsbewegung mitmacht. Auf diese Weise kann ein radialer Abstand zwischen Magnetfeldsensor 30 und der Drehachse der Welle 80 in Abhängigkeit von dem absoluten Drehwinkel der Welle 80 verändert werden. Das erwähnte Zahnrad kann insbesondere in axialer Richtung versetzt zu dem Code-Rad angeordnet sein, so dass auch die Zahnstange an einer entsprechenden axialen Position angeordnet ist. Der Magnetfeldsensor 30 kann an einer Halterung befestigt sein, die sich in axialer Richtung erstreckt und ihrerseits mit der Zahnstange verbunden ist, so dass der Magnetfeldsensor 30 an derselben axialen Position angeordnet ist, wie die Geberanordnung 20.
-
15 zeigt ein schematisches Flussdiagramm eines Verfahrens zur Bestimmung eines absoluten Drehwinkels gemäß Ausführungsbeispielen. Bei einem ersten Schritt 152 wird ein erstes Sensorsignal und ein zweites Sensorsignal von einem Magnetfeldsensor empfangen, wobei das erste Sensorsignal und das zweite Sensorsignal zwei unabhängige Richtungskomponenten eines von dem Magnetfeldsensor erfassten Magnetfelds darstellen. Es ist allerdings auch möglich, dass noch ein drittes Sensorsignal oder sogar noch weitere Sensorsignale erfasst werden, die von dem Magnetfeldsensor oder einem bzw. mehreren Magnetfeldsensoren stammen. Üblicherweise ist eine Zuordnung zwischen dem ersten Sensorsignal und einer der beiden unabhängigen Richtungskomponenten sowie zwischen dem zweiten Sensorsignal und der anderen unabhängigen Richtungskomponente des Magnetfelds gegeben. Dies ist jedoch nicht unbedingt der Fall, so dass sich die zwei unabhängigen Richtungskomponenten ggf. auch durch Vektorkomponenten-Aufteilung der zwei Sensorsignale ermitteln lassen.
-
Bei einem Schritt 154 des Verfahrens zur Bestimmung des absoluten Drehwinkels wird eine relative translatorische Position einer Geberanordnung (z. B. eines Geberrads) zu dem Magnetfeldsensor durch gemeinsame Auswertung des ersten Sensorsignals und des zweiten Sensorsignals bestimmt. Mittels der gemeinsamen Auswertung des ersten Sensorsignals und des zweiten Sensorsignals kann eine eventuell vorhandene Mehrdeutigkeit innerhalb eines der beiden Sensorsignale aufgelöst werden, so dass die relative translatorische Position zumindest auf einen ausreichend kleinen Bereich eingeschränkt werden kann. Hierbei wird nämlich ausgenutzt, dass sich das erste Sensorsignal und das zweite Sensorsignal unterschiedlich bezüglich einer Änderung der relativen translatorischen Position verhalten.
-
Eine relative Winkelposition der Geberanordnung zu dem Magnetfeldsensor kann durch Auswertung von zumindest dem ersten Sensorsignal oder dem zweiten Sensorsignal bestimmt werden, wie bei 156 des in 15 dargestellten Flussdiagramms gezeigt. Die Schritte 154 und 156 können jedoch auch in umgekehrter Reihenfolge oder auch zeitgleich zueinander ausgeführt werden. Weiterhin ist es möglich, dass die Bestimmung der relativen translatorischen Position auf ein Ergebnis zurückgreift, das von der Bestimmung der relativen Winkelposition (also Schritt 156) erzeugt wird sowie in dem Blockschaltbild von 7 schematisch angedeutet.
-
Der absolute Drehwinkel kann sodann auf der Grundlage der bestimmten relativen translatorischen Position und der bestimmten relativen Winkelposition bestimmt werden, wie bei Schritt 158 angedeutet. Zu diesem Zweck kann auf einen bekannten Zusammenhang zwischen der relativen translatorischen Position und der relativen Winkelposition zurückgegriffen werden, der sich z. B. aus der Ganghöhe eines Gewindes ergibt, das zum Erzeugen der relativen translatorischen Position aus dem absoluten Drehwinkel verwendet wird. Ganz allgemein kann zu diesem Zweck ein Übersetzungsverhältnis herangezogen werden, das angibt, wie sich die relative translatorische Position in Bezug auf den absoluten Drehwinkel und/oder die relative Winkelposition verhält. Ein derartiges Übersetzungsverhältnis ist in der Regel durch das verwendete Getriebe vorgegeben, das zur Erzeugung der relativen translatorischen Position auf der Grundlage des absoluten Drehwinkels verwendet wird.
-
Bei vielen derzeit bekannten absoluten Drehwinkelsensoren kann kein Multipolrad verwendet werden, da durch die periodische Unterteilung des Multipolrads der erfassbare Winkelbereich begrenzt wird. Andererseits wächst mit einer großen magnetischen Periode (wie es bei einer geringen Anzahl von Polpaaren der Fall ist) auch die Ungenauigkeit der Magnetfelderfassung. Somit stehen sich bei derartigen bekannten Drehwinkelsensoren die Forderungen nach einem großen erfassbaren Winkelbereich und hoher Präzision als konkurrierende Forderungen gegenüber.
-
Eine Kombination mit durchgehenden Wellen ist relativ einfach möglich, da es nicht unbedingt notwendig ist, dass ein zur Magnetfelderzeugung verwendeter Magnet auf der Achse der Welle liegt.
-
Im Gegensatz zu einigen bekannten Drehwinkelsensoren erfordert der vorgeschlagene Drehwinkelsensor nicht, dass zum Beispiel ein Magnet mittels einer linearen Führung (welche eine Zwangsbedingung (engl. „constraint”) für die Bewegung erzeugt) geführt wird, sodass die Drehbewegung der Welle linear auf eine axiale Bewegung abgebildet wird. Ein derartige lineare Führung ist mechanisch aufwändig, ist zudem wegen des Lagerspiels ungenauer und verursacht Abrieb. Weiterhin muss bei einigen dieser Drehwinkelsensoren ein Sensor zur Erfassung der linearen Bewegung in etwa so groß sein, wie der axiale Hub. Im Gegensatz dazu kann bei Ausführungsbeispielen der Sensor klein sein und lediglich der Magnet bzw. die Geberanordnung muss ca. so breit sein, wie der Hub ist. Auf diese Weise wird bei derartigen Ausführungsbeispielen zwar mehr Magnetmaterial benötigt (wobei man allerdings preisgünstigen plasikgebundenen Ferrit verwenden kann); andererseits kommen diese Ausführungsbeispiele mit einem minimal kleinen Sensorchip aus (der pro Fläche wesentlich teurer ist als der Magnet).
-
Bei einigen weiteren bekannten Drehwinkelsensoren werden zwei räumlich voneinander beabstandete Sensoren verwendet: eines ist seitlich/radial angebracht und eines auf der Achse der Welle liegend. Das ist zum Einen teuer, zum Anderen ungenau, da beide Sensoren bzw. deren Gehäuse mit erheblichen Toleranzen zur Welle bzw. zum Magneten positioniert/installiert werden. Bei Ausführungsbeispielen können prinzipiell alle zu erfassenden Richtungskomponenten des Magnetfelds mit Sensorelementen erfasst werden, die auf einem einzigen Halbleiterchip angeordnet und somit mikrometergenau zueinander ausgerichtet sind. Bei einem Drehwinkelsensor gemäß der Ausführungsbeispielen gibt es somit nur noch eine Lagetoleranz zwischen Magnet und Chip, wohingegen es bei den erwähnten bekannten Drehwinkelsensoren zumindest zwei Lagetoleranzen gibt. Weiterhin ist bei diesen bekannten Anordnungen notwendig, zumindest einige der Sensorsignale von einem Chip zu einem anderen Chip oder zu einem dritten Chip zu übertragen, was umständlich mit der Verdrahtung ist und unter Umständen weitere Ungenauigkeiten erzeugt.
-
Obwohl manche Aspekte im Zusammenhang mit einer Vorrichtung beschrieben wurden, versteht es sich, dass diese Aspekte auch eine Beschreibung des entsprechenden Verfahrens darstellen, sodass ein Block oder ein Bauelement einer Vorrichtung auch als ein entsprechender Verfahrensschritt oder als ein Merkmal eines Verfahrensschrittes zu verstehen ist. Analog dazu stellen Aspekte, die im Zusammenhang mit einem oder als ein Verfahrensschritt beschrieben wurden, auch eine Beschreibung eines entsprechenden Blocks oder Details oder Merkmals einer entsprechenden Vorrichtung dar. Einige oder alle der Verfahrensschritte können durch einen Hardware-Apparat (oder unter Verwendung eines Hardware-Apparats), wie zum Beispiel einen Mikroprozessor, einen programmierbaren Computer oder eine elektronische Schaltung ausgeführt werden. Bei einigen Ausführungsbeispielen können einige oder mehrere der wichtigsten Verfahrensschritte durch einen solchen Apparat ausgeführt werden.
-
Je nach bestimmten Implementierungsanforderungen können Ausführungsbeispiele der Erfindung in Hardware oder in Software implementiert sein. Die Implementierung kann unter Verwendung eines digitalen Speichermediums, beispielsweise einer Floppy-Disk, einer DVD, einer Blu-ray Disc, einer CD, eines ROM, eines PROM, eines EPROM, eines EEPROM oder eines FLASH-Speichers, einer Festplatte oder eines anderen magnetischen oder optischen Speichers durchgeführt werden, auf dem elektronisch lesbare Steuersignale gespeichert sind, die mit einem programmierbaren Computersystem derart zusammenwirken können oder zusammenwirken, dass das jeweilige Verfahren durchgeführt wird. Deshalb kann das digitale Speichermedium computerlesbar sein.
-
Manche Ausführungsbeispiele gemäß der Erfindung umfassen also einen Datenträger, der elektronisch lesbare Steuersignale aufweist, die in der Lage sind, mit einem programmierbaren Computersystem derart zusammenzuwirken, dass eines der hierin beschriebenen Verfahren durchgeführt wird.
-
Allgemein können Ausführungsbeispiele der vorliegenden Erfindung als Computerprogrammprodukt mit einem Programmcode implementiert sein, wobei der Programmcode dahin gehend wirksam ist, eines der Verfahren durchzuführen, wenn das Computerprogrammprodukt auf einem Computer abläuft.
-
Der Programmcode kann beispielsweise auch auf einem maschinenlesbaren Träger gespeichert sein.
-
Andere Ausführungsbeispiele umfassen das Computerprogramm zum Durchführen eines der hierin beschriebenen Verfahren, wobei das Computerprogramm auf einem maschinenlesbaren Träger gespeichert ist.
-
Mit anderen Worten ist ein Ausführungsbeispiel des erfindungsgemäßen Verfahrens somit ein Computerprogramm, das einen Programmcode zum Durchführen eines der hierin beschriebenen Verfahren aufweist, wenn das Computerprogramm auf einem Computer abläuft.
-
Ein weiteres Ausführungsbeispiel der erfindungsgemäßen Verfahren ist somit ein Datenträger (oder ein digitales Speichermedium oder ein computerlesbares Medium), auf dem das Computerprogramm zum Durchführen eines der hierin beschriebenen Verfahren aufgezeichnet ist.
-
Ein weiteres Ausführungsbeispiel des erfindungsgemäßen Verfahrens ist somit ein Datenstrom oder eine Sequenz von Signalen, der bzw. die das Computerprogramm zum Durchführen eines der hierin beschriebenen Verfahren darstellt bzw. darstellen. Der Datenstrom oder die Sequenz von Signalen kann bzw. können beispielsweise dahin gehend konfiguriert sein, über eine Datenkommunikationsverbindung, beispielsweise über das Internet, transferiert zu werden.
-
Ein weiteres Ausführungsbeispiel umfasst eine Verarbeitungseinrichtung, beispielsweise einen Computer oder ein programmierbares Logikbauelement, die dahin gehend konfiguriert oder angepasst ist, eines der hierin beschriebenen Verfahren durchzuführen.
-
Ein weiteres Ausführungsbeispiel umfasst einen Computer, auf dem das Computerprogramm zum Durchführen eines der hierin beschriebenen Verfahren installiert ist.
-
Ein weiteres Ausführungsbeispiel gemäß der Erfindung umfasst eine Vorrichtung oder ein System, die bzw. das ausgelegt ist, um ein Computerprogramm zur Durchführung zumindest eines der hierin beschriebenen Verfahren zu einem Empfänger zu übertragen. Die Übertragung kann beispielsweise elektronisch oder optisch erfolgen. Der Empfänger kann beispielsweise ein Computer, ein Mobilgerät, ein Speichergerät oder eine ähnliche Vorrichtung sein. Die Vorrichtung oder das System kann beispielsweise einen Datei-Server zur Übertragung des Computerprogramms zu dem Empfänger umfassen.
-
Bei manchen Ausführungsbeispielen kann ein programmierbares Logikbauelement (beispielsweise ein feldprogrammierbares Gatterarray, ein FPGA) dazu verwendet werden, manche oder alle Funktionalitäten der hierin beschriebenen Verfahren durchzuführen. Bei manchen Ausführungsbeispielen kann ein feldprogrammierbares Gatterarray mit einem Mikroprozessor zusammenwirken, um eines der hierin beschriebenen Verfahren durchzuführen. Allgemein werden die Verfahren bei einigen Ausführungsbeispielen seitens einer beliebigen Hardwarevorrichtung durchgeführt. Diese kann eine universell einsetzbare Hardware wie ein Computerprozessor (CPU) sein oder für das Verfahren spezifische Hardware, wie beispielsweise ein ASIC.
-
Die oben beschriebenen Ausführungsbeispiele stellen lediglich eine Veranschaulichung der Prinzipien der vorliegenden Erfindung dar. Es versteht sich, dass Modifikationen und Variationen der hierin beschriebenen Anordnungen und Einzelheiten anderen Fachleuten einleuchten werden. Deshalb ist beabsichtigt, dass die Erfindung lediglich durch den Schutzumfang der nachstehenden Patentansprüche und nicht durch die spezifischen Einzelheiten, die anhand der Beschreibung und der Erläuterung der Ausführungsbeispiele hierin präsentiert wurden, beschränkt sei.
-
In der vorausgehenden detaillierten Beschreibung kann gesehen werden, dass verschiedene Merkmale in Ausführungsbeispielen zusammengruppiert sind. Diese Weise der Offenbarung soll nicht als Absicht verstanden werden, dass die beanspruchten Ausführungsbeispiele mehr Merkmale benötigen, als explizit in dem jeweiligen Anspruch erwähnt sind. Vielmehr ist es so, dass erfinderischer Inhalt in weniger als allen Merkmalen eines einzelnen offenbarten Ausführungsbeispiels liegen kann. Daher sollen die folgenden Ansprüche hiermit als in die Beschreibung aufgenommen gelten, wobei jeder Anspruch für sich als ein separates Ausführungsbeispiel stehen kann. Obwohl jeder Anspruch für sich als separates Ausführungsbeispiel stehen kann, ist anzumerken, dass – obwohl ein abhängiger Anspruch sich in den Ansprüchen auf eine spezifische Kombination mit einem oder mehreren Ansprüchen beziehen kann – andere Ausführungsbeispiele auch eine Kombination dieses abhängigen Anspruchs mit dem Gegenstand von jedem anderen abhängigen Anspruch oder eine Kombination von jedem Merkmal mit anderen abhängigen und unabhängigen Ansprüchen umfassen oder einschließen können. Solche Kombinationen sind hierein vorgeschlagen, sofern nicht explizit ausgedrückt ist, dass eine spezifische Kombination nicht beabsichtigt ist. Weiterhin ist auch beabsichtigt, dass Merkmale eines Anspruches in irgendeinen anderen unabhängigen Anspruch aufgenommen werden können, selbst wenn dieser Anspruch nicht direkt abhängig ist von dem unabhängigen Anspruch.
-
Es ist weiterhin anzumerken, dass in der Beschreibung oder in den Ansprüchen offenbarte Verfahren durch eine Vorrichtung implementiert sein können, die Mittel zum Ausführen der jeweiligen Schritte oder Aktionen dieses Verfahrens aufweist.
-
Weiterhin kann in manchen Ausführungsbeispielen ein einzelner Schritt/Aktion in mehrere Unterschritte unterteilt werden oder mehrere Unterschritte enthalten. Derartige Unterschritte können in der Offenbarung des einzelnen Schritts enthalten und Teil der Offenbarung des einzelnen Schritts sein.