CN215016876U - 一种自清洁扫拖一体装置及自清洁扫拖一体机器人 - Google Patents
一种自清洁扫拖一体装置及自清洁扫拖一体机器人 Download PDFInfo
- Publication number
- CN215016876U CN215016876U CN202120779727.XU CN202120779727U CN215016876U CN 215016876 U CN215016876 U CN 215016876U CN 202120779727 U CN202120779727 U CN 202120779727U CN 215016876 U CN215016876 U CN 215016876U
- Authority
- CN
- China
- Prior art keywords
- water
- sewage
- rolling brush
- cleaning
- tank
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Landscapes
- Cleaning In General (AREA)
Abstract
本实用新型提供一种自清洁扫拖一体装置,包括蜗壳、滚刷,及用于带动所述滚刷转动的动力装置;所述蜗壳在所述滚刷转动的方向上依次设置有清污口、出污口、齿梳及进水口;所述滚刷通过所述清污口与地面接触;所述出污口用于对外连通吸尘器;所述齿梳用于清除所述滚刷上的杂物;所述进水口用于对外连通水系统向所述滚刷上注水。如此设置,动力装置带动滚刷旋转时,齿梳能够刮下滚刷上的污水和杂物,污水和杂物进入出污口被吸走,进水口以一定频率向滚刷喷水,使滚刷在每一次转动的循环中都能及时的清除污水和杂物,再注上干净的水,完成自清洁循环。本实用新型还提供了一种应用该自清洁扫拖一体装置的自清洁扫拖一体机器人。
Description
技术领域
本实用新型涉及扫地机器人技术领域,特别是涉及一种自清洁扫拖一体装置及自清洁扫拖一体机器人。
背景技术
目前的扫拖一体机器人主要有两种形态:
第1种:在常规扫地机器人中加入一块固定的水箱+拖布,扫和拖同时进行。机器行进过程中,扫过的地面由拖布擦一遍,水箱持续向拖布上滴水,拖布为手洗清洁或一次性可更换。
第2种:在常规扫地机器人中加入两块旋转的三角拖布,加入清洗基站,基站具备清水箱和污水箱,机器人本体不带水箱。机器人先全屋扫,再拖地,拖地时每工作一定时间回到基站清洗拖布,再回到上一次停止清扫的位置继续清扫。
而以上两种传统的扫拖一体机器人主要存在以下缺陷:
第1种:拖布跟随机器人擦一遍地,每处地面实际上只被擦过一次。拖布不能自动清洗,一次清洁周期中拖布会越来越脏。水箱容积小,滴水打湿拖布不均匀,仅滴水孔处能够较好打湿。拖地效率低,效果差。
第2种:因为采用了先扫后拖和往返式拖地的方式,每次工作需要在扫地完成后人工安装拖地组件;在拖地过程中每两次回基站洗拖布之间的拖地周期里拖布会越来越脏,拖布上的水会越来越少。不仅拖地速度慢,而且加入了复杂的基站后使得结构复杂、成本更高。
实用新型内容
基于上述,提供一种自清洁扫拖一体装置及自清洁扫拖一体机器人,不仅拖地速度快,而且更干净,同时结构简单易于实现、制造成本低。
一种自清洁扫拖一体装置,包括蜗壳、滚刷,及用于带动所述滚刷转动的动力装置;所述蜗壳在所述滚刷转动的方向上依次设置有清污口、出污口、齿梳及进水口;所述滚刷通过所述清污口与地面接触;所述出污口用于对外连通吸尘器;所述齿梳用于清除所述滚刷上的垃圾异物;所述进水口用于对外连通水系统向所述滚刷上注水。当所述滚刷工作时候,所述进水口通过对外连通水系统向所述滚刷上注水或洗涤剂,湿润的所述滚刷转动带走地面上的异物垃圾和灰尘,所述齿梳能够将所述滚刷上体积较大的异物垃圾剥离,体积较小的垃圾和灰尘一起与所述滚刷上的水/洗涤剂混合在一起形成污水,在所述滚刷转动时离心力的作用下被甩出,所述齿梳能够进一步充当“蜗舌”的作用,将被甩出的污水拦截下来,流进出污口内,同时,所述齿梳将被甩出的污水拦截下来后还能够将所述齿梳上较大体积的异物垃圾冲刷下来,同污水一起被吸入所述出污口中,此时所述进水口继续向所述滚刷上注干净的水或洗涤剂再次润湿所述滚梳,完成一个循环,以此达到使所述滚刷自清洁的目的。
在其中一个实施例中,所述蜗壳内还设置有蜗舌;所述蜗舌设置在所述齿梳与所述进水口之间,或者设置在所述齿梳的齿根上;所述蜗舌用于阻挡所述滚刷转动时甩出的污水。
在其中一个实施例中,所述蜗舌靠近所述齿梳的一面为平滑的弧面,以便于水流更加顺畅的改变方向。
在其中一个实施例中,所述蜗壳内还设置有缓冲回流板;所述缓冲回流板设置在所述进水口与所述清污口之间;所述缓冲回流板用于改变所述滚刷转动时甩出的水的运动方向,使被甩出的水重新回到所述滚刷上,解决停机后的滴水问题,并减少所述滚刷转动时甩出的干净水冲击地面的力度,减少溅水。
在其中一个实施例中,所述缓冲回流板靠近所述清污口设置。
在其中一个实施例中,所述蜗壳内还设置有凸棱条;所述凸棱条设置在所述进水口与所述清污口之间;所述凸棱条用于改变所述滚刷转动时甩出的水的运动方向,使被甩出的水重新回到所述滚刷上,解决停机后的滴水问题,并减少所述滚刷转动时甩出的干净水冲击地面的力度,减少溅水。
在其中一个实施例中,所述凸棱条迎接所述滚刷甩出的水的一面为弧面,以便更加顺畅的改变水流方向。
在其中一个实施例中,所述凸棱条靠近所述清污口设置。
在其中一个实施例中,所述蜗舌水平横向设置;所述齿梳倾斜设置;所述齿梳与所述蜗舌的夹角大于或等于5度。
在其中一个实施例中,所述蜗舌水平横向设置;所述齿梳倾斜设置;所述齿梳与所述蜗舌的夹角大于或等于5度,且小于或等于15度。
在其中一个实施例中,所述齿梳和所述蜗舌贴近所述滚刷设置,且所述蜗舌与所述滚刷的距离小于所述齿梳与所述滚刷的距离。
在其中一个实施例中,所述齿梳与所述滚刷的距离在1.5至2.5毫米之间;所述蜗舌与所述滚刷的距离在0.5至1.5毫米之间。
在其中一个实施例中,所述齿梳与所述滚刷的距离在1.5至2.5毫米之间;所述蜗舌与所述滚刷的距离在1至2毫米之间。
在其中一个实施例中,所述齿梳与所述滚刷的距离在1至2毫米之间;所述蜗舌与所述滚刷的距离在0至1毫米之间。
在其中一个实施例中,所述齿梳贴近所述滚刷设置,所述蜗舌与所述滚刷过盈配合,即所述蜗舌压入所述滚刷表面一定深度。
在其中一个实施例中,所述蜗舌压入所述滚刷表面的深度在0.5至2毫米之间;
在其中一个实施例中,所述蜗舌压入所述滚刷表面的深度在1至1.5毫米之间;
在其中一个实施例中,所述蜗舌压入所述滚刷表面的深度在1.5至2.5毫米之间。
在其中一个实施例中,所述清污口靠近所述出污口一侧的边缘设置有铲水板;所述铲水板用于接触地面铲起积水。
在其中一个实施例中,所述清污口靠近所述出污口一侧的边缘设置有毛刷;所述毛刷用于阻挡所述滚刷从所述清污口与地面之间的空隙中甩出的污水和异物垃圾。
上述提供的自清洁扫拖一体装置,当所述滚刷工作时候,所述进水口通过对外连通水系统向所述滚刷上注水或洗涤剂,湿润的所述滚刷转动带走地面上的异物垃圾和灰尘,所述齿梳能够将所述滚刷上体积较大的异物垃圾剥离,体积较小的垃圾和灰尘一起与所述滚刷上的水/洗涤剂混合在一起形成污水,在所述滚刷转动时离心力的作用下被甩出,所述齿梳能够进一步充当“蜗舌”的作用,将被甩出的污水拦截下来,流进出污口内,同时,所述齿梳将被甩出的污水拦截下来后还能够将所述齿梳上较大体积的异物垃圾冲刷下来,同污水一起被吸入所述出污口中,此时所述进水口继续向所述滚刷上注干净的水或洗涤剂再次润湿所述滚梳,完成一个循环,以此达到使所述滚刷自清洁的目的。
根据上述内容,本申请还提供了一种包含上述自清洁扫拖一体装置的自清洁扫拖一体机器人。
一种自清洁扫拖一体机器人,包括壳体、设置在所述壳体内的滚刷、用于带动所述滚刷转动的动力装置,风机、过滤器、净水系统及运动系统;所述壳体设置有用于安装所述滚刷的蜗壳;所述蜗壳在所述滚刷转动的方向上依次设置有清污口、出污口、齿梳及进水口;所述滚刷通过所述清污口与地面接触;所述齿梳用于清除所述滚刷上的垃圾异物;所述壳体还设置有污水槽及吸气道;所述污水槽通过所述吸气道与所述出污口连通;所述污水槽还与所述风机的进风口连通;所述过滤器设置在所述污水槽与所述风机的进风口之间;所述净水系统包括净水箱;所述净水箱与所述进水口连通,以向所述滚刷上注干净的水或清洗剂;所述净水箱设置在所述污水槽上方并与所述污水槽的槽口边缘密封可拆卸连接;所述运动系统用于带动所述机器人在地面上做位置移动。当机器人工作时候,所述净水系统通过所述蜗壳上设置的所述进水口向所述滚刷上注干净的水或洗涤剂,湿润的所述滚刷转动带走地面上的异物垃圾和灰尘,所述齿梳能够将所述滚刷上体积较大的异物垃圾剥离,体积较小的垃圾和灰尘一起与所述滚刷上的水/洗涤剂混合在一起形成污水,在所述滚刷转动时离心力的作用下被甩出,所述齿梳能够进一步充当“蜗舌”的作用,将被甩出的污水拦截下来,流进出污口内,同时,所述齿梳将被甩出的污水拦截下来后还能够将所述齿梳上较大体积的异物垃圾冲刷下来,同污水一起被吸入所述出污口中,此时所述净水系统通过所述蜗壳上设置的所述进水口向所述滚刷上注干净的水或洗涤剂再次润湿所述滚梳,完成一个循环,以此达到使所述滚刷自清洁的目的。
在其中一个实施例中,所述蜗壳内还设置有蜗舌;所述蜗舌设置在所述齿梳与所述进水口之间;所述蜗舌用于阻挡所述滚刷转动时甩出的污水。
在其中一个实施例中,所述蜗壳内还设置有蜗舌;所述蜗舌设置在所述齿梳的齿根上;所述蜗舌用于阻挡所述滚刷转动时甩出的污水。
在其中一个实施例中,所述蜗舌靠近所述齿梳的一面为平滑的弧面,以便于水流更加顺畅的改变方向。
在其中一个实施例中,所述壳体内还设置有分离部;所述分离部设置在所述出污口与所述过滤器之间的吸污流路上;所述分离部用于将液态和/或固态物质分离出来。
在其中一个实施例中,所述分离部为所述吸气道流路末端的弯道。夹杂着污水和异物垃圾的气流在所述弯道处流动方向发生偏转,质量较大的污水液体和异物垃圾在惯性和空气阻力的作用下按照一定的角度进入所述污水箱内与所述污水箱内的污水混合,质量较小的空气则被吸入所述过滤器中过滤后进所述风机排出。
在其中一个实施例中,所述分离部为所述吸气道流路末端的弯道为直角弯道。夹杂着污水和异物垃圾的气流在所述直角弯道处流动方向发生急转,质量较大的污水液体和异物垃圾在惯性和空气阻力的作用下按照一定的角度进入所述污水箱内与所述污水箱内的污水混合,质量较小的空气则被吸入所述过滤器中过滤后进所述风机排出。
在其中一个实施例中,所述分离部为所述吸气道流路末端的弯道为圆弧形离心弯道。夹杂着污水和异物垃圾的气流在所述离心弯道处产生离心力,质量较大的污水液体和异物垃圾在惯性的作用下与壁面接触降速,并汇聚后流进所述污水箱内与所述污水箱内的污水混合,质量较小的空气则挤在中部,进一步被吸入所述过滤器中过滤后进所述风机排出。
在其中一个实施例中,所述分离部为所述污水槽进污口下游处设置的弯道。夹杂着污水和异物垃圾的气流在所述弯道处流动方向发生偏转,质量较大的污水液体和异物垃圾在惯性和空气阻力的作用下按照一定的角度接触所述污水箱内的污水并混合,质量较小的空气则被吸入所述过滤器中过滤后进所述风机排出。
在其中一个实施例中,所述分离部为所述污水槽进污口下游处设置的直角弯道。夹杂着污水和异物垃圾的气流在所述直角弯道处流动方向发生急转,质量较大的污水液体和异物垃圾在惯性和空气阻力的作用下按照一定的角度接触所述污水箱内的污水并混合,质量较小的空气则被吸入所述过滤器中过滤后进所述风机排出。
在其中一个实施例中,所述分离部为所述污水槽进污口下游处设置的圆弧形离心弯道。夹杂着污水和异物垃圾的气流在所述离心弯道处产生离心力,质量较大的污水液体和异物垃圾在惯性的作用下与壁面接触降速,并汇聚后流下来与所述污水箱内的污水混合,质量较小的空气则挤在中部,进一步被吸入所述过滤器中过滤后进所述风机排出。
在其中一个实施例中,所述分离部为设置在所述过滤器与所述污水槽之间流路上的分离槽。
在其中一个实施例中,所述分离槽的空间为圆柱形,以便于使偏心进入的夹杂着污水和异物垃圾的气流在所述分离槽转动产生离心力。
在其中一个实施例中,所述分离槽的侧壁面开设有进气口;所述分离槽的侧壁面或底面开设有回流口;所述进气口的位置高于所述回流口的位置;所述进气口与所述污水槽的槽口连通;所述回流口与所述污水槽的底部连通。
在其中一个实施例中,所述清污口靠近所述出污口一侧的边缘设置有铲水板;所述铲水板用于接触地面铲起积水。
在其中一个实施例中,所述清污口靠近所述出污口一侧的边缘设置有毛刷;所述毛刷用于阻挡所述滚刷从所述清污口与地面之间的空隙中甩出的污水和异物垃圾。
在其中一个实施例中,所述净水系统还包括依次连通的吸水管、水泵、输水管;所述吸水管与所述净水箱连通;所述输水管与所述进水口连通,以使得所述净水箱通过依次连通的所述吸水管、所述水泵、所述输水管及所述进水口向所述滚刷上注干净的水或清洗剂。
在其中一个实施例中,所述净水系统还包括分液器;所述输水管通过所述分液器与所述进水口连通,即所述分液器的进口与所述输水管的出口连通,所述分液器的出口与所述进水口连通。在该实施例中,为了使得干净的水或清洗剂更加均匀的注到所述滚刷上,优选方案为在所述蜗壳上沿滚刷的轴向设置若干个进水口,将所述分液器设置同样数量的出水口与所述进水口连通,将一股水流并排分成若干条均匀的注到所述滚刷上。
在其中一个实施例中,所述壳体还设置有进风道、出风道及出风口;所述过滤器设置在所述污水槽与所述进风道之间的流路上;所述进风道与所述出风道通过所述风机连通;所述出风道与所述出风口连通。
在其中一个实施例中,所述蜗壳内还设置有缓冲回流板;所述缓冲回流板设置在所述进水口与所述清污口之间;所述缓冲回流板用于改变所述滚刷转动时甩出的水的运动方向,使被甩出的水重新回到所述滚刷上,解决停机后的滴水问题,并减少所述滚刷转动时甩出的干净水冲击地面的力度,减少溅水。
在其中一个实施例中,所述缓冲回流板靠近所述清污口设置。
在其中一个实施例中,所述蜗壳内还设置有凸棱条;所述凸棱条设置在所述进水口与所述清污口之间;所述凸棱条用于改变所述滚刷转动时甩出的水的运动方向,使被甩出的水重新回到所述滚刷上,解决停机后的滴水问题,并减少所述滚刷转动时甩出的干净水冲击地面的力度,减少溅水。
在其中一个实施例中,所述凸棱条迎接所述滚刷甩出的水的一面为弧面,以便更加顺畅的改变水流方向。
在其中一个实施例中,所述凸棱条靠近所述清污口设置。
在其中一个实施例中,所述蜗舌水平横向设置;所述齿梳倾斜设置;所述齿梳与所述蜗舌的夹角大于或等于5度。
在其中一个实施例中,所述蜗舌水平横向设置;所述齿梳倾斜设置;所述齿梳与所述蜗舌的夹角大于或等于5度,且小于或等于15度。
在其中一个实施例中,所述齿梳和所述蜗舌贴近所述滚刷设置,且所述蜗舌与所述滚刷的距离小于所述齿梳与所述滚刷的距离。
在其中一个实施例中,所述齿梳与所述滚刷的距离在1.5至2.5毫米之间;所述蜗舌与所述滚刷的距离在0.5至1.5毫米之间。
在其中一个实施例中,所述齿梳与所述滚刷的距离在1.5至2.5毫米之间;所述蜗舌与所述滚刷的距离在1至2毫米之间。
在其中一个实施例中,所述齿梳与所述滚刷的距离在1至2毫米之间;所述蜗舌与所述滚刷的距离在0至1毫米之间。
在其中一个实施例中,所述齿梳贴近所述滚刷设置,所述蜗舌与所述滚刷过盈配合,即所述蜗舌压入所述滚刷表面一定深度。
在其中一个实施例中,所述蜗舌压入所述滚刷表面的深度在0.5至2毫米之间;
在其中一个实施例中,所述蜗舌压入所述滚刷表面的深度在1至1.5毫米之间;
在其中一个实施例中,所述蜗舌压入所述滚刷表面的深度在1.5至2.5毫米之间。
在其中一个实施例中,还包括导航装置;所述导航装置用于获取机器人周围的障碍物信息。
在其中一个实施例中,所述导航装置为激光导航雷达。
在其中一个实施例中,所述壳体上还开设有雷达窗,用于当所述导航装置安装在所述壳体内部时,所述导航装置能够通过所述雷达窗获取到机器人的外部障碍物信息。
上述提供的一种自清洁扫拖一体机器人,包括壳体、设置在所述壳体内的滚刷、用于带动所述滚刷转动的动力装置,风机、过滤器、净水系统及运动系统;所述壳体设置有用于安装所述滚刷的蜗壳;所述蜗壳在所述滚刷转动的方向上依次设置有清污口、出污口、齿梳及进水口;所述滚刷通过所述清污口与地面接触;所述齿梳用于清除所述滚刷上的垃圾异物;所述壳体还设置有污水槽及吸气道;所述污水槽通过所述吸气道与所述出污口连通;所述污水槽还与所述风机的进风口连通;所述过滤器设置在所述污水槽与所述风机的进风口之间;所述净水系统包括净水箱;所述净水箱与所述进水口连通,以向所述滚刷上注干净的水或清洗剂;所述净水箱设置在所述污水槽上方并与所述污水槽的槽口边缘密封可拆卸连接;所述运动系统用于带动所述机器人在地面上做位置移动。如此设置,当机器人工作时候,所述净水系统通过所述蜗壳上设置的所述进水口向所述滚刷上注干净的水或洗涤剂,湿润的所述滚刷转动带走地面上的异物垃圾和灰尘,所述齿梳能够将所述滚刷上体积较大的异物垃圾剥离,体积较小的垃圾和灰尘一起与所述滚刷上的水/洗涤剂混合在一起形成污水,在所述滚刷转动时离心力的作用下被甩出,所述齿梳能够进一步充当“蜗舌”的作用,将被甩出的污水拦截下来,流进出污口内,同时,所述齿梳将被甩出的污水拦截下来后还能够将所述齿梳上较大体积的异物垃圾冲刷下来,同污水一起被吸入所述出污口中,此时所述净水系统通过所述蜗壳上设置的所述进水口向所述滚刷上注干净的水或洗涤剂再次润湿所述滚梳,完成一个循环,以此达到使所述滚刷自清洁的目的。
根据上述内容,基于相同的发明构思,本申请还提供了另一种自清洁扫拖一体机器人的形态。
一种自清洁扫拖一体机器人,包括机架、安装于所述机架上的扫拖装置、集污系统、运动系统及净水系统;所述扫拖装置包括蜗壳、设置于所述蜗壳内的滚刷,及用于带动所述滚刷转动的动力装置;所述蜗壳在所述滚刷转动的方向上依次设置有清污口、出污口、齿梳及进水口;所述滚刷通过所述清污口与地面接触;所述齿梳用于清除所述滚刷上的垃圾异物;所述集污系统包括依次连通的吸污管道、污水箱、过滤器及风机;所述出污口与所述吸污管道连通;所述污水箱用于盛放所述吸污管道吸进的污水和/或垃圾;所述净水系统包括净水箱;所述净水箱与所述进水口连通,以向所述滚刷上注干净的水或清洗剂;所述运动系统用于带动所述机架在地面上做位置移动。
在其中一个实施例中,所述蜗壳内还设置有蜗舌;所述蜗舌设置在所述齿梳与所述进水口之间,或者设置在所述齿梳的齿根上;所述蜗舌用于阻挡所述滚刷转动时甩出的污水。
在其中一个实施例中,所述蜗舌靠近所述齿梳的一面为平滑的弧面,以便于水流更加顺畅的改变方向。
在其中一个实施例中,所述集污系统还包括分离器;所述分离器设置在所述出污口与所述过滤器之间的吸污流路上;所述分离器用于将吸污流路中的液态和/或固态物质分离出来。
在其中一个实施例中,所述分离器为气液分离器、固气分离器、固液分离器中的一种或两种及两种以上的组合。
在其中一个实施例中,所述分离器开设有进气口及回流口;所述进气口的位置高于所述回流口的位置;所述进气口与所述污水箱的上端或顶部连通;所述回流口与所述污水槽的下端或底部连通。
在其中一个实施例中,所述清污口靠近所述出污口一侧的边缘设置有铲水板;所述铲水板用于接触地面铲起积水。
在其中一个实施例中,所述清污口靠近所述出污口一侧的边缘设置有毛刷;所述毛刷用于阻挡所述滚刷从所述清污口与地面之间的空隙中甩出的污水和异物垃圾。
在其中一个实施例中,所述净水系统还包括依次连通的吸水管、水泵、输水管;所述吸水管与所述净水箱连通;所述输水管与所述进水口连通,以使得所述净水箱通过依次连通的所述吸水管、所述水泵、所述输水管及所述进水口向所述滚刷上注干净的水或清洗剂。
在其中一个实施例中,所述净水系统还包括分液器;所述输水管通过所述分液器与所述进水口连通,即所述分液器的进口与所述输水管的出口连通,所述分液器的出口与所述进水口连通。在该实施例中,为了使得干净的水或清洗剂更加均匀的注到所述滚刷上,优选方案为在所述蜗壳上沿滚刷的轴向设置若干个进水口,将所述分液器设置同样数量的出水口与所述进水口连通,将一股水流并排分成若干条均匀的注到所述滚刷上。
在其中一个实施例中,所述集污系统还包括进风管道;所述进风管道一端与所述风机的进风口连通,另外一端通过所述过滤器与所述污水箱连通。
在其中一个实施例中,所述集污系统还包括出风管道;所述出风管道与所述风机的出风口连通。
在其中一个实施例中,所述蜗壳内还设置有缓冲回流板;所述缓冲回流板设置在所述进水口与所述清污口之间;所述缓冲回流板用于改变所述滚刷转动时甩出的水的运动方向,使被甩出的水重新回到所述滚刷上,解决停机后的滴水问题,并减少所述滚刷转动时甩出的干净水冲击地面的力度,减少溅水。
在其中一个实施例中,所述缓冲回流板靠近所述清污口设置。
在其中一个实施例中,所述蜗壳内还设置有凸棱条;所述凸棱条设置在所述进水口与所述清污口之间;所述凸棱条用于改变所述滚刷转动时甩出的水的运动方向,使被甩出的水重新回到所述滚刷上,解决停机后的滴水问题,并减少所述滚刷转动时甩出的干净水冲击地面的力度,减少溅水。
在其中一个实施例中,所述凸棱条迎接所述滚刷甩出的水的一面为弧面,以便更加顺畅的改变水流方向。
在其中一个实施例中,所述凸棱条靠近所述清污口设置。
在其中一个实施例中,所述蜗舌水平横向设置;所述齿梳倾斜设置;所述齿梳与所述蜗舌的夹角大于或等于5度。
在其中一个实施例中,所述蜗舌水平横向设置;所述齿梳倾斜设置;所述齿梳与所述蜗舌的夹角大于或等于5度,且小于或等于15度。
在其中一个实施例中,所述齿梳和所述蜗舌贴近所述滚刷设置,且所述蜗舌与所述滚刷的距离小于所述齿梳与所述滚刷的距离。
在其中一个实施例中,所述齿梳与所述滚刷的距离在1.5至2.5毫米之间;所述蜗舌与所述滚刷的距离在0.5至1.5毫米之间。
在其中一个实施例中,所述齿梳与所述滚刷的距离在1.5至2.5毫米之间;所述蜗舌与所述滚刷的距离在1至2毫米之间。
在其中一个实施例中,所述齿梳与所述滚刷的距离在1至2毫米之间;所述蜗舌与所述滚刷的距离在0至1毫米之间。
在其中一个实施例中,所述齿梳贴近所述滚刷设置,所述蜗舌与所述滚刷过盈配合,即所述蜗舌压入所述滚刷表面一定深度。
在其中一个实施例中,所述蜗舌压入所述滚刷表面的深度在0.5至2毫米之间;
在其中一个实施例中,所述蜗舌压入所述滚刷表面的深度在1至1.5毫米之间;
在其中一个实施例中,所述蜗舌压入所述滚刷表面的深度在1.5至2.5毫米之间。
在其中一个实施例中,还包括导航装置;所述导航装置用于获取机器人周围的障碍物信息。
在其中一个实施例中,所述导航装置为激光导航雷达。
上述提供的一种自清洁扫拖一体机器人,当机器人工作时候,所述净水系统通过所述蜗壳上设置的所述进水口向所述滚刷上注干净的水或洗涤剂,湿润的所述滚刷转动带走地面上的异物垃圾和灰尘,所述齿梳能够将所述滚刷上体积较大的异物垃圾剥离,体积较小的垃圾和灰尘一起与所述滚刷上的水/洗涤剂混合在一起形成污水,在所述滚刷转动时离心力的作用下被甩出,所述齿梳能够进一步充当“蜗舌”的作用,将被甩出的污水拦截下来,流进出污口内,同时,所述齿梳将被甩出的污水拦截下来后还能够将所述齿梳上较大体积的异物垃圾冲刷下来,同污水一起被吸入所述出污口中,此时所述净水系统通过所述蜗壳上设置的所述进水口向所述滚刷上注干净的水或洗涤剂再次润湿所述滚梳,完成一个循环,以此达到使所述滚刷自清洁的目的。
附图说明
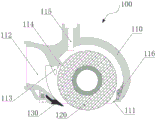
图1为一实施例提供的自清洁扫拖一体装置的剖面结构示意图;
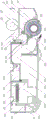
图2为一实施例提供的自清洁扫拖一体机器人的剖面结构示意图。
附图标记说明:100.扫拖装置;111.清污口;112.出污口;113.齿梳;114.蜗舌;115.进水口;116.缓冲回流板;120.滚刷;130.铲水板;210.吸气道;211.离心弯道;220.污水槽;230.分离槽;231.进气口;232.回流口;241.风机;242.进风道;243.出风道;310.净水箱;320.吸水管;330.水泵;340.输水管;350.分液器;400.密封圈;10.壳体11.出风口12.雷达窗。
具体实施方式
在本专利文件中,下面讨论的图1-2和用于描述本公开的原理或方法的各种实施例只用于说明,而不应以任何方式解释为限制了本公开的范围。参考附图,本公开的优选实施例将在下文中描述。在下面的描述中,将省略众所周知的功能或配置的详细描述,以免以不必要的细节混淆本公开的主题。而且,本文中使用的术语将根据本实用新型的功能定义。因此,所述术语可能会根据用户或操作者的意向或用法而不同。因此,本文中使用的术语必须基于本文中所作的描述来理解。
一种自清洁扫拖一体装置,如图1所示,包括蜗壳、滚刷120,及用于带动滚刷120转动的动力装置。蜗壳在滚刷120转动的方向上依次设置有清污口111、出污口112、齿梳113及进水口115。滚刷120通过清污口111与地面接触。出污口112用于对外连通吸尘器。齿梳113用于清除滚刷120上的垃圾异物。进水口115用于对外连通水系统向滚刷120上注水。当滚刷120工作时候,进水口115通过对外连通水系统向滚刷120上注水或洗涤剂,湿润的滚刷120转动带走地面上的异物垃圾和灰尘,齿梳113能够将滚刷120上体积较大的异物垃圾剥离,体积较小的垃圾和灰尘一起与滚刷120上的水/洗涤剂混合在一起形成污水,在滚刷120转动时离心力的作用下被甩出,齿梳113能够进一步充当“蜗舌114”的作用,将被甩出的污水拦截下来,流进出污口112内,同时,齿梳113将被甩出的污水拦截下来后还能够将齿梳113上较大体积的异物垃圾冲刷下来,同污水一起被吸入出污口112中,此时进水口115继续向滚刷120上注干净的水或洗涤剂再次润湿滚梳,完成一个循环,以此达到使滚刷120自清洁的目的。
在其中一个实施例中,如图1所示,蜗壳内还设置有蜗舌114。蜗舌114设置在齿梳113与进水口115之间,或者设置在齿梳113的齿根上。蜗舌114用于阻挡滚刷120转动时甩出的污水。
在其中一个实施例中,蜗舌114靠近齿梳113的一面为平滑的弧面,以便于水流更加顺畅的改变方向。
在其中一个实施例中,如图1所示,蜗壳内还设置有缓冲回流板116。缓冲回流板116设置在进水口115与清污口111之间。缓冲回流板116用于改变滚刷120转动时甩出的水的运动方向,使被甩出的水重新回到滚刷120上,解决停机后的滴水问题,并减少滚刷120转动时甩出的干净水冲击地面的力度,减少溅水。
在其中一个实施例中,如图1所示,缓冲回流板116靠近清污口111设置。
在其中一个实施例中,如图2所示,蜗壳内还设置有凸棱条(其作用相当于缓冲回流板116)。凸棱条(其作用相当于缓冲回流板116)设置在进水口115与清污口111之间。凸棱条(其作用相当于缓冲回流板116)用于改变滚刷120转动时甩出的水的运动方向,使被甩出的水重新回到滚刷120上,解决停机后的滴水问题,并减少滚刷120转动时甩出的干净水冲击地面的力度,减少溅水。
在其中一个实施例中,如图2所示,凸棱条(其作用相当于缓冲回流板116)迎接滚刷120甩出的水的一面为弧面,以便更加顺畅的改变水流方向。
在其中一个实施例中,如图2所示,凸棱条(其作用相当于缓冲回流板116)靠近清污口111设置。
在其中一个实施例中,蜗舌114水平横向设置。齿梳113倾斜设置。
在其中一个实施例中,蜗舌114水平横向设置。齿梳113倾斜设置。齿梳113与蜗舌114的夹角大于或等于5度。
在其中一个实施例中,蜗舌114水平横向设置。齿梳113倾斜设置。齿梳113与蜗舌114的夹角大于或等于5度,且小于或等于15度。
在其中一个实施例中,如图1或图2所示,齿梳113和蜗舌114贴近滚刷120设置,且蜗舌114与滚刷120的距离小于齿梳113与滚刷120的距离。
在其中一个实施例中,齿梳113与滚刷120的距离在1.5至2.5毫米之间。蜗舌114与滚刷120的距离在0.5至1.5毫米之间。
在其中一个实施例中,齿梳113与滚刷120的距离在1.5至2.5毫米之间。蜗舌114与滚刷120的距离在1至2毫米之间。
在其中一个实施例中,齿梳113与滚刷120的距离在1至2毫米之间。蜗舌114与滚刷120的距离在0至1毫米之间。
在其中一个实施例中,如图2所示,齿梳113贴近滚刷120设置,蜗舌114与滚刷120过盈配合,即蜗舌114压入滚刷120表面一定深度。
在其中一个实施例中,蜗舌114压入滚刷120表面的深度在0.5至2毫米之间。
在其中一个实施例中,蜗舌114压入滚刷120表面的深度在1至1.5毫米之间。
在其中一个实施例中,蜗舌114压入滚刷120表面的深度在1.5至2.5毫米之间。
在其中一个实施例中,如图1或图2所示,清污口111靠近出污口112一侧的边缘设置有铲水板130。铲水板130用于接触地面铲起积水。
在其中一个实施例中,清污口111靠近出污口112一侧的边缘设置有毛刷(图中未画出)。毛刷(图中未画出)用于阻挡滚刷120从清污口111与地面之间的空隙中甩出的污水和异物垃圾。
上述提供的自清洁扫拖一体装置,当滚刷120工作时候,进水口115通过对外连通水系统向滚刷120上注水或洗涤剂,湿润的滚刷120转动带走地面上的异物垃圾和灰尘,齿梳113能够将滚刷120上体积较大的异物垃圾剥离,体积较小的垃圾和灰尘一起与滚刷120上的水/洗涤剂混合在一起形成污水,在滚刷120转动时离心力的作用下被甩出,齿梳113能够进一步充当“蜗舌114”的作用,将被甩出的污水拦截下来,流进出污口112内,同时,齿梳113将被甩出的污水拦截下来后还能够将齿梳113上较大体积的异物垃圾冲刷下来,同污水一起被吸入出污口112中,此时进水口115继续向滚刷120上注干净的水或洗涤剂再次润湿滚梳,完成一个循环,以此达到使滚刷120自清洁的目的。
根据上述内容,本申请还提供了一种包含上述自清洁扫拖一体装置的自清洁扫拖一体机器人。
一种自清洁扫拖一体机器人,如图2所示,包括壳体10、设置在壳体10内的滚刷120、用于带动滚刷120转动的动力装置,风机241、过滤器、净水系统及运动系统。壳体10设置有用于安装滚刷120的蜗壳。蜗壳在滚刷120转动的方向上依次设置有清污口111、出污口112、齿梳113及进水口115。滚刷120通过清污口111与地面接触。齿梳113用于清除滚刷120上的垃圾异物。壳体10还设置有污水槽220及吸气道210。污水槽220通过吸气道210与出污口112连通。污水槽220还与风机241的进风口连通。过滤器设置在污水槽220与风机241的进风口之间。净水系统包括净水箱310。净水箱310与进水口115连通,以向滚刷120上注干净的水或清洗剂。净水箱310设置在污水槽220上方并与污水槽220的槽口边缘密封可拆卸连接。运动系统用于带动机器人在地面上做位置移动。当机器人工作时候,净水系统通过蜗壳上设置的进水口115向滚刷120上注干净的水或洗涤剂,湿润的滚刷120转动带走地面上的异物垃圾和灰尘,齿梳113能够将滚刷120上体积较大的异物垃圾剥离,体积较小的垃圾和灰尘一起与滚刷120上的水/洗涤剂混合在一起形成污水,在滚刷120转动时离心力的作用下被甩出,齿梳113能够进一步充当“蜗舌114”的作用,将被甩出的污水拦截下来,流进出污口112内,同时,齿梳113将被甩出的污水拦截下来后还能够将齿梳113上较大体积的异物垃圾冲刷下来,同污水一起被吸入出污口112中,此时净水系统通过蜗壳上设置的进水口115向滚刷120上注干净的水或洗涤剂再次润湿滚梳,完成一个循环,以此达到使滚刷120自清洁的目的。
在其中一个实施例中,如图1或图2所示,蜗壳内还设置有蜗舌114。蜗舌114设置在齿梳113与进水口115之间。蜗舌114用于阻挡滚刷120转动时甩出的污水。
在其中一个实施例中,蜗壳内还设置有蜗舌114。蜗舌114设置在齿梳113的齿根上。蜗舌114用于阻挡滚刷120转动时甩出的污水。
在其中一个实施例中,蜗舌114靠近齿梳113的一面为平滑的弧面,以便于水流更加顺畅的改变方向。
在其中一个实施例中,如图2所示,壳体10内还设置有分离部。分离部设置在出污口112与过滤器之间的吸污流路上。分离部用于将液态和/或固态物质分离出来。
在其中一个实施例中,如图2所示,分离部为吸气道210流路末端的弯道211。夹杂着污水和异物垃圾的气流在弯道211处流动方向发生偏转,质量较大的污水液体和异物垃圾在惯性和空气阻力的作用下按照一定的角度进入污水槽220内与污水槽220内的污水混合,质量较小的空气则被吸入过滤器中过滤后进风机241排出。
在其中一个实施例中,分离部为吸气道210流路末端的弯道211为直角弯道。夹杂着污水和异物垃圾的气流在直角弯道处流动方向发生急转,质量较大的污水液体和异物垃圾在惯性和空气阻力的作用下按照一定的角度进入污水槽220内与污水槽220内的污水混合,质量较小的空气则被吸入过滤器中过滤后进风机241排出。
在其中一个实施例中,分离部为吸气道210流路末端的弯道211为圆弧形弯道。夹杂着污水和异物垃圾的气流在弯道211处产生离心力,质量较大的污水液体和异物垃圾在惯性的作用下与壁面接触降速,并汇聚后流进污水槽220内与污水槽220内的污水混合,质量较小的空气则挤在中部,进一步被吸入过滤器中过滤后进风机241排出。
在其中一个实施例中,分离部为污水槽220进污口下游处设置的弯道211。夹杂着污水和异物垃圾的气流在弯道211处流动方向发生偏转,质量较大的污水液体和异物垃圾在惯性和空气阻力的作用下按照一定的角度接触污水槽220内的污水并混合,质量较小的空气则被吸入过滤器中过滤后进风机241排出。
在其中一个实施例中,分离部为污水槽220进污口下游处设置的直角弯道。夹杂着污水和异物垃圾的气流在直角弯道处流动方向发生急转,质量较大的污水液体和异物垃圾在惯性和空气阻力的作用下按照一定的角度接触污水槽220内的污水并混合,质量较小的空气则被吸入过滤器中过滤后进风机241排出。
在其中一个实施例中,分离部为污水槽220进污口下游处设置的圆弧形弯道。夹杂着污水和异物垃圾的气流在弯道处产生离心力,质量较大的污水液体和异物垃圾在惯性的作用下与壁面接触降速,并汇聚后流下来与污水槽220内的污水混合,质量较小的空气则挤在中部,进一步被吸入过滤器中过滤后进风机241排出。
在其中一个实施例中,如图2所示,污水槽210的槽口与净水箱310之间设置有密封圈400。
在其中一个实施例中,如图2所示,污水槽210与净水箱310之间还通过铰链连接,以便于净水箱310以一转轴转动脱离污水槽210的槽口。
在其中一个实施例中,如图2所示,污水槽210与净水箱310之间还通过卡扣连接,以便于净水箱310盖在污水槽210的槽口上时固定。
在其中一个实施例中,如图2所示,分离部为设置在过滤器与污水槽220之间流路上的分离槽230。
在其中一个实施例中,如图2所示,分离槽230的空间为圆柱形,以便于使偏心进入的夹杂着污水和异物垃圾的气流在分离槽230转动产生离心力。
在其中一个实施例中,如图2所示,分离槽230的侧壁面开设有进气口231。分离槽230的侧壁面或底面开设有回流口232。进气口231的位置高于回流口232的位置。进气口231与污水槽220的槽口连通。回流口232与污水槽220的底部连通。
在其中一个实施例中,如图2所示,清污口111靠近出污口112一侧的边缘设置有铲水板130。铲水板130用于接触地面铲起积水。
在其中一个实施例中,清污口111靠近出污口112一侧的边缘设置有毛刷(图中未画出)。毛刷(图中未画出)用于阻挡滚刷120从清污口111与地面之间的空隙中甩出的污水和异物垃圾。
在其中一个实施例中,如图2所示,净水系统还包括依次连通的吸水管320、水泵330、输水管340。吸水管320与净水箱310连通。输水管340与进水口115连通,以使得净水箱310通过依次连通的吸水管320、水泵330、输水管340及进水口115向滚刷120上注干净的水或清洗剂。
在其中一个实施例中,如图2所示,净水系统还包括分液器350。输水管340通过分液器350与进水口115连通,即分液器350的进口与输水管340的出口连通,分液器350的出口与进水口115连通。在该实施例中,为了使得干净的水或清洗剂更加均匀的注到滚刷120上,优选方案为在蜗壳上沿滚刷120的轴向设置若干个进水口115,将分液器350设置同样数量的出水口与进水口115连通,将一股水流并排分成若干条均匀的注到滚刷120上。
在其中一个实施例中,如图2所示,壳体10还设置有进风道242、出风道243及出风口11。过滤器设置在污水槽220与进风道242之间的流路上。进风道242与出风道243通过风机241连通。出风道243与出风口11连通。
在其中一个实施例中,如图2所示,蜗壳内还设置有缓冲回流板116。缓冲回流板116设置在进水口115与清污口111之间。缓冲回流板116用于改变滚刷120转动时甩出的水的运动方向,使被甩出的水重新回到滚刷120上,解决停机后的滴水问题,并减少滚刷120转动时甩出的干净水冲击地面的力度,减少溅水。
在其中一个实施例中,如图2所示,缓冲回流板116靠近清污口111设置。
在其中一个实施例中,如图2所示,蜗壳内还设置有凸棱条(其作用相当于缓冲回流板116)。凸棱条设置在进水口115与清污口111之间。凸棱条用于改变滚刷120转动时甩出的水的运动方向,使被甩出的水重新回到滚刷120上,解决停机后的滴水问题,并减少滚刷120转动时甩出的干净水冲击地面的力度,减少溅水。
在其中一个实施例中,如图2所示,凸棱条(其作用相当于缓冲回流板116)迎接滚刷120甩出的水的一面为弧面,以便更加顺畅的改变水流方向。
在其中一个实施例中,如图2所示,凸棱条(其作用相当于缓冲回流板116)与蜗壳110一体设置。
在其中一个实施例中,如图2所示,凸棱条(其作用相当于缓冲回流板116)靠近清污口111设置。
在其中一个实施例中,蜗舌114水平横向设置。齿梳113倾斜设置。齿梳113与蜗舌114的夹角大于或等于5度。
在其中一个实施例中,蜗舌114水平横向设置。齿梳113倾斜设置。齿梳113与蜗舌114的夹角大于或等于5度,且小于或等于15度。
在其中一个实施例中,如图2所示,齿梳113和蜗舌114贴近滚刷120设置,且蜗舌114与滚刷120的距离小于齿梳113与滚刷120的距离。
在其中一个实施例中,齿梳113与滚刷120的距离在1.5至2.5毫米之间。蜗舌114与滚刷120的距离在0.5至1.5毫米之间。
在其中一个实施例中,齿梳113与滚刷120的距离在1.5至2.5毫米之间。蜗舌114与滚刷120的距离在1至2毫米之间。
在其中一个实施例中,齿梳113与滚刷120的距离在1至2毫米之间。蜗舌114与滚刷120的距离在0至1毫米之间。
在其中一个实施例中,齿梳113贴近滚刷120设置,蜗舌114与滚刷120过盈配合,即蜗舌114压入滚刷120表面一定深度。
在其中一个实施例中,蜗舌114压入滚刷120表面的深度在0.5至2毫米之间。
在其中一个实施例中,蜗舌114压入滚刷120表面的深度在1至1.5毫米之间。
在其中一个实施例中,蜗舌114压入滚刷120表面的深度在1.5至2.5毫米之间。
在其中一个实施例中,还包括导航装置。导航装置用于获取机器人周围的障碍物信息。
在其中一个实施例中,导航装置为激光导航雷达。
在其中一个实施例中,壳体10上还开设有雷达窗12,用于当导航装置安装在壳体10内部时,导航装置能够通过雷达窗12获取到机器人的外部障碍物信息。
在其中一个实施例中,所述净水箱310与所述污水槽220的边缘通过铰链连接。
更了更加清楚的表述本发明,下面以一具体实施例对本申请的结构和原理做进一步的说明,应当注意的是,以下说明仅仅是为了便于理解,而不应被理解为是对本申请权利范围的限缩性解释。如图2所示:
清洁结构(包括扫拖装置100):由动力装置、蜗壳、设置在蜗壳内的滚刷120、齿梳113、蜗舌114,设置在清污口111边缘的橡胶铲水条,以及进水装置(包括水泵330、分液器350和喷嘴)、污水箱(其作用相当于污水槽220)和吸污管道(其作用相当于吸气道210)组成。动力装置带动滚刷120旋转,齿梳113和蜗舌114刮下滚刷120上的污水和杂物,橡胶铲条铲起地面上的污水和杂物,污水和杂物沿着吸污管道(其作用相当于吸气道210)被吸走进入污水箱(其作用相当于污水槽220),进水装置以一定频率向滚刷120喷水。
水箱结构:由净水箱310、污水箱(其作用相当于污水槽220)、铰链、海帕盖组成。净水箱310和污水箱(其作用相当于污水槽220)为上下分布,净水箱310的底作为污水箱(其作用相当于污水槽220)的顶面,净水箱310和污水箱(其作用相当于污水槽220)用铰链和卡扣连接。污水箱(其作用相当于污水槽220)前端为进污口,后端为出风口11,出风口11处连接风机241在水箱形成负压,通过吸污管道(其作用相当于吸气道210)将污水杂物吸进污水箱(其作用相当于污水槽220)。
激光雷达:采用内置激光雷达,机器人外壳在激光雷达前方镂空(形成雷达窗12),提供220°激光发射角度。
上述提供的一种自清洁扫拖一体机器人,包括壳体10、设置在壳体10内的滚刷120、用于带动滚刷120转动的动力装置,风机241、过滤器、净水系统及运动系统。壳体10设置有用于安装滚刷120的蜗壳。蜗壳在滚刷120转动的方向上依次设置有清污口111、出污口112、齿梳113及进水口115。滚刷120通过清污口111与地面接触。齿梳113用于清除滚刷120上的垃圾异物。壳体10还设置有污水槽220及吸气道210。污水槽220通过吸气道210与出污口112连通。污水槽220还与风机241的进风口连通。过滤器设置在污水槽220与风机241的进风口之间。净水系统包括净水箱310。净水箱310与进水口115连通,以向滚刷120上注干净的水或清洗剂。净水箱310设置在污水槽220上方并与污水槽220的槽口边缘密封可拆卸连接。运动系统用于带动机器人在地面上做位置移动。如此设置,当机器人工作时候,净水系统通过蜗壳上设置的进水口115向滚刷120上注干净的水或洗涤剂,湿润的滚刷120转动带走地面上的异物垃圾和灰尘,齿梳113能够将滚刷120上体积较大的异物垃圾剥离,体积较小的垃圾和灰尘一起与滚刷120上的水/洗涤剂混合在一起形成污水,在滚刷120转动时离心力的作用下被甩出,齿梳113能够进一步充当“蜗舌114”的作用,将被甩出的污水拦截下来,流进出污口112内,同时,齿梳113将被甩出的污水拦截下来后还能够将齿梳113上较大体积的异物垃圾冲刷下来,同污水一起被吸入出污口112中,此时净水系统通过蜗壳上设置的进水口115向滚刷120上注干净的水或洗涤剂再次润湿滚梳,完成一个循环,以此达到使滚刷120自清洁的目的。
根据上述内容,基于相同的发明构思,本申请还提供了另一种自清洁扫拖一体机器人的形态。
一种自清洁扫拖一体机器人,包括机架(其作用类似于壳体10)、安装于机架(其作用类似于壳体10)上的扫拖装置100、集污系统、运动系统及净水系统。扫拖装置100包括蜗壳、设置于蜗壳内的滚刷120,及用于带动滚刷120转动的动力装置。蜗壳在滚刷120转动的方向上依次设置有清污口111、出污口112、齿梳113及进水口115。滚刷120通过清污口111与地面接触。齿梳113用于清除滚刷120上的垃圾异物。集污系统包括依次连通的吸污管道(其作用相当于吸气道210)、污水箱(其作用相当于污水槽220)、过滤器及风机241。出污口112与吸污管道(其作用相当于吸气道210)连通。污水箱(其作用相当于污水槽220)用于盛放吸污管道(其作用相当于吸气道210)吸进的污水和/或垃圾。净水系统包括净水箱310。净水箱310与进水口115连通,以向滚刷120上注干净的水或清洗剂。运动系统用于带动机架(其作用类似于壳体10)在地面上做位置移动。
在其中一个实施例中,蜗壳内还设置有蜗舌114。蜗舌114设置在齿梳113与进水口115之间,或者设置在齿梳113的齿根上。蜗舌114用于阻挡滚刷120转动时甩出的污水。
在其中一个实施例中,蜗舌114靠近齿梳113的一面为平滑的弧面,以便于水流更加顺畅的改变方向。
在其中一个实施例中,集污系统还包括分离器(其作用相当于分离槽230)。分离器(其作用相当于分离槽230)设置在出污口112与过滤器之间的吸污流路上。分离器(其作用相当于分离槽230)用于将吸污流路中的液态和/或固态物质分离出来。
在其中一个实施例中,分离器(其作用相当于分离槽230)为气液分离器(其作用相当于分离槽230)、固气分离器(其作用相当于分离槽230)、固液分离器(其作用相当于分离槽230)中的一种或两种及两种以上的组合。
在其中一个实施例中,分离器(其作用相当于分离槽230)开设有进气口231及回流口232。进气口231的位置高于回流口232的位置。进气口231与污水箱(其作用相当于污水槽220)的上端或顶部连通。回流口232与污水槽220的下端或底部连通。
在其中一个实施例中,清污口111靠近出污口112一侧的边缘设置有铲水板130。铲水板130用于接触地面铲起积水。
在其中一个实施例中,清污口111靠近出污口112一侧的边缘设置有毛刷(图中未画出)。毛刷(图中未画出)用于阻挡滚刷120从清污口111与地面之间的空隙中甩出的污水和异物垃圾。
在其中一个实施例中,净水系统还包括依次连通的吸水管320、水泵330、输水管340。吸水管320与净水箱310连通。输水管340与进水口115连通,以使得净水箱310通过依次连通的吸水管320、水泵330、输水管340及进水口115向滚刷120上注干净的水或清洗剂。
在其中一个实施例中,净水系统还包括分液器350。输水管340通过分液器350与进水口115连通,即分液器350的进口与输水管340的出口连通,分液器350的出口与进水口115连通。在该实施例中,为了使得干净的水或清洗剂更加均匀的注到滚刷120上,优选方案为在蜗壳上沿滚刷120的轴向设置若干个进水口115,将分液器350设置同样数量的出水口与进水口115连通,将一股水流并排分成若干条均匀的注到滚刷120上。
在其中一个实施例中,集污系统还包括进风管道。进风管道一端与风机241的进风口连通,另外一端通过过滤器与污水箱(其作用相当于污水槽220)连通。
在其中一个实施例中,集污系统还包括出风管道。出风管道与风机241的出风口11连通。
在其中一个实施例中,蜗壳内还设置有缓冲回流板116。缓冲回流板116设置在进水口115与清污口111之间。缓冲回流板116用于改变滚刷120转动时甩出的水的运动方向,使被甩出的水重新回到滚刷120上,解决停机后的滴水问题,并减少滚刷120转动时甩出的干净水冲击地面的力度,减少溅水。
在其中一个实施例中,缓冲回流板116靠近清污口111设置。
在其中一个实施例中,蜗壳内还设置有凸棱条(其作用相当于缓冲回流板116)。凸棱条(其作用相当于缓冲回流板116)设置在进水口115与清污口111之间。凸棱条(其作用相当于缓冲回流板116)用于改变滚刷120转动时甩出的水的运动方向,使被甩出的水重新回到滚刷120上,解决停机后的滴水问题,并减少滚刷120转动时甩出的干净水冲击地面的力度,减少溅水。
在其中一个实施例中,凸棱条(其作用相当于缓冲回流板116)迎接滚刷120甩出的水的一面为弧面,以便更加顺畅的改变水流方向。
在其中一个实施例中,凸棱条(其作用相当于缓冲回流板116)靠近清污口111设置。
在其中一个实施例中,蜗舌114水平横向设置。齿梳113倾斜设置。齿梳113与蜗舌114的夹角大于或等于5度。
在其中一个实施例中,蜗舌114水平横向设置。齿梳113倾斜设置。齿梳113与蜗舌114的夹角大于或等于5度,且小于或等于15度。
在其中一个实施例中,齿梳113和蜗舌114贴近滚刷120设置,且蜗舌114与滚刷120的距离小于齿梳113与滚刷120的距离。
在其中一个实施例中,齿梳113与滚刷120的距离在1.5至2.5毫米之间。蜗舌114与滚刷120的距离在0.5至1.5毫米之间。
在其中一个实施例中,齿梳113与滚刷120的距离在1.5至2.5毫米之间。蜗舌114与滚刷120的距离在1至2毫米之间。
在其中一个实施例中,齿梳113与滚刷120的距离在1至2毫米之间。蜗舌114与滚刷120的距离在0至1毫米之间。
在其中一个实施例中,齿梳113贴近滚刷120设置,蜗舌114与滚刷120过盈配合,即蜗舌114压入滚刷120表面一定深度。
在其中一个实施例中,蜗舌114压入滚刷120表面的深度在0.5至2毫米之间。
在其中一个实施例中,蜗舌114压入滚刷120表面的深度在1至1.5毫米之间。
在其中一个实施例中,蜗舌114压入滚刷120表面的深度在1.5至2.5毫米之间。
在其中一个实施例中,还包括导航装置。导航装置用于获取机器人周围的障碍物信息。
在其中一个实施例中,导航装置为激光导航雷达。
上述提供的一种自清洁扫拖一体机器人,当机器人工作时候,净水系统通过蜗壳上设置的进水口115向滚刷120上注干净的水或洗涤剂,湿润的滚刷120转动带走地面上的异物垃圾和灰尘,齿梳113能够将滚刷120上体积较大的异物垃圾剥离,体积较小的垃圾和灰尘一起与滚刷120上的水/洗涤剂混合在一起形成污水,在滚刷120转动时离心力的作用下被甩出,齿梳113能够进一步充当“蜗舌114”的作用,将被甩出的污水拦截下来,流进出污口112内,同时,齿梳113将被甩出的污水拦截下来后还能够将齿梳113上较大体积的异物垃圾冲刷下来,同污水一起被吸入出污口112中,此时净水系统通过蜗壳上设置的进水口115向滚刷120上注干净的水或洗涤剂再次润湿滚梳,完成一个循环,以此达到使滚刷120自清洁的目的。
以上实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
Claims (10)
1.一种自清洁扫拖一体装置,其特征在于,包括蜗壳、滚刷,及用于带动所述滚刷转动的动力装置;
所述蜗壳在所述滚刷转动的方向上依次设置有清污口、出污口、齿梳及进水口;
所述滚刷通过所述清污口与地面接触;
所述出污口用于对外连通吸尘器;
所述齿梳用于清除所述滚刷上的垃圾异物;
所述进水口用于对外连通水系统向所述滚刷上注水。
2.根据权利要求1所述的自清洁扫拖一体装置,其特征在于,
所述蜗壳内还设置有蜗舌;
所述蜗舌设置在所述齿梳与所述进水口之间,或者设置在所述齿梳的齿根上;
所述蜗舌用于阻挡所述滚刷转动时甩出的污水。
3.根据权利要求1所述的自清洁扫拖一体装置,其特征在于,
所述蜗壳内还设置有缓冲回流板;
所述缓冲回流板设置在所述进水口与所述清污口之间;
所述缓冲回流板用于改变所述滚刷转动时甩出的水的运动方向,使被甩出的水重新回到所述滚刷上,解决停机后的滴水问题,并减少所述滚刷转动时甩出的干净水冲击地面的力度,减少溅水。
4.根据权利要求1所述的自清洁扫拖一体装置,其特征在于,
所述清污口靠近所述出污口一侧的边缘设置有铲水板或毛刷;
所述铲水板用于接触地面铲起积水;
所述毛刷用于阻挡所述滚刷从所述清污口与地面之间的空隙中甩出的污水和/或垃圾。
5.根据权利要求2所述的自清洁扫拖一体装置,其特征在于,
所述齿梳和所述蜗舌贴近所述滚刷设置,且所述蜗舌与所述滚刷的距离小于所述齿梳与所述滚刷的距离。
6.一种自清洁扫拖一体机器人,其特征在于,包括壳体、设置于所述壳体内的扫拖装置、净水系统、风机、过滤器,及运动系统;
所述扫拖装置为权利要求1-5任何一项所述的自清洁扫拖一体装置;
所述蜗壳与所述壳体固定连接或一体设置;
所述壳体还设置有污水槽及吸气道;
所述污水槽通过所述吸气道与所述出污口连通;
所述污水槽还与所述风机的进风口连通;
所述过滤器设置在所述污水槽与所述风机的进风口之间;
所述净水系统包括净水箱;
所述净水箱与所述进水口连通,以向所述滚刷上注干净的水或清洗剂;
所述净水箱设置在所述污水槽上方并与所述污水槽的槽口边缘密封可拆卸连接;
所述运动系统用于带动所述机器人在地面上做位置移动。
7.根据权利要求6所述的自清洁扫拖一体机器人,其特征在于,
所述壳体内还设置有分离部;
所述分离部设置在所述出污口与所述过滤器之间的吸污流路上;
所述分离部用于将液态和/或固态物质分离出来。
8.根据权利要求7所述的自清洁扫拖一体机器人,其特征在于,
所述分离部为所述吸气道流路末端的离心弯道,或者,所述污水槽进污口下游处设置的离心弯道,或者,设置在所述过滤器与所述污水槽之间流路上的分离槽。
9.根据权利要求6所述的自清洁扫拖一体机器人,其特征在于,
所述净水系统还包括依次连通的吸水管、水泵、输水管及分液器;
所述吸水管与所述净水箱连通;
所述分液器与所述进水口连通,以使得所述净水箱通过依次连通的所述吸水管、所述水泵、所述输水管、所述分液器及所述进水口向所述滚刷上注干净的水或清洗剂。
10.一种自清洁扫拖一体机器人,其特征在于,包括机架、安装于所述机架上的扫拖装置、集污系统、运动系统及净水系统;
所述扫拖装置为权利要求1-5任何一项所述的自清洁扫拖一体装置;
所述集污系统包括依次连通的吸污管道、污水箱、过滤器及风机;
所述出污口与所述吸污管道连通;
所述污水箱用于盛放所述吸污管道吸进的污水和/或垃圾;
所述净水系统包括净水箱;
所述净水箱与所述进水口连通,以向所述滚刷上注干净的水或清洗剂;
所述运动系统用于带动所述机架在地面上做位置移动。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202120779727.XU CN215016876U (zh) | 2021-04-15 | 2021-04-15 | 一种自清洁扫拖一体装置及自清洁扫拖一体机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202120779727.XU CN215016876U (zh) | 2021-04-15 | 2021-04-15 | 一种自清洁扫拖一体装置及自清洁扫拖一体机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN215016876U true CN215016876U (zh) | 2021-12-07 |
Family
ID=79105986
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202120779727.XU Active CN215016876U (zh) | 2021-04-15 | 2021-04-15 | 一种自清洁扫拖一体装置及自清洁扫拖一体机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN215016876U (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114403750A (zh) * | 2022-01-11 | 2022-04-29 | 刘会育 | 一种肿瘤科呕吐物高效清理设备 |
| CN115211770A (zh) * | 2021-04-15 | 2022-10-21 | 深圳尼宝科技有限公司 | 一种自清洁扫拖一体装置及自清洁扫拖一体机器人 |
| WO2023124305A1 (zh) * | 2021-12-29 | 2023-07-06 | 深圳银星智能集团股份有限公司 | 三相分离系统及清洁装置 |
| WO2023194149A3 (de) * | 2022-04-05 | 2024-02-15 | Alfred Kärcher SE & Co. KG | Tankeinrichtung für ein bodenreinigungsgerät, bodenreinigungsgerät mit einer tankeinrichtung und bodenreinigungssystem |
-
2021
- 2021-04-15 CN CN202120779727.XU patent/CN215016876U/zh active Active
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115211770A (zh) * | 2021-04-15 | 2022-10-21 | 深圳尼宝科技有限公司 | 一种自清洁扫拖一体装置及自清洁扫拖一体机器人 |
| WO2023124305A1 (zh) * | 2021-12-29 | 2023-07-06 | 深圳银星智能集团股份有限公司 | 三相分离系统及清洁装置 |
| CN114403750A (zh) * | 2022-01-11 | 2022-04-29 | 刘会育 | 一种肿瘤科呕吐物高效清理设备 |
| WO2023194149A3 (de) * | 2022-04-05 | 2024-02-15 | Alfred Kärcher SE & Co. KG | Tankeinrichtung für ein bodenreinigungsgerät, bodenreinigungsgerät mit einer tankeinrichtung und bodenreinigungssystem |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN215016876U (zh) | 一种自清洁扫拖一体装置及自清洁扫拖一体机器人 | |
| US20230058126A1 (en) | Vacuum head, collection bin, cleaning tray, filter assembly, and cleaning apparatus | |
| CN114468874A (zh) | 基站和清洁机器人系统 | |
| CN202408751U (zh) | 自动清洁机除尘机构 | |
| CN215305578U (zh) | 基站及清洁机器人系统 | |
| CN215457669U (zh) | 一种扫拖一体机器人 | |
| CN112401762A (zh) | 一种集成站及其清洁机器人系统 | |
| CN114680747B (zh) | 清洁头及清洁工具 | |
| CN113171032A (zh) | 扫拖一体分离式洗地机及扫拖方法 | |
| CN213046744U (zh) | 清洁装置及清洁机器人 | |
| CN218220114U (zh) | 洗地机系统 | |
| CN217338433U (zh) | 一种颗粒状固体垃圾清洁头及清洁工具 | |
| CN115211770A (zh) | 一种自清洁扫拖一体装置及自清洁扫拖一体机器人 | |
| CN216020859U (zh) | 清洁头及清洁工具 | |
| CN215424445U (zh) | 扫拖一体分离式洗地机 | |
| CN214433997U (zh) | 一种集成站及其清洁机器人系统 | |
| CN213758090U (zh) | 拖地机器人 | |
| CN114766971A (zh) | 一种颗粒状固体垃圾清洁头及清洁工具 | |
| CN221285635U (zh) | 一种清洁效果好的表面清洁装置 | |
| CN221285637U (zh) | 一种具有梳齿的表面清洁装置 | |
| CN215534083U (zh) | 一种用于清洁机的清洁模块、清洁机及清洁机系统 | |
| CN219846350U (zh) | 一种用于清洁机的地刷组件及清洁机 | |
| CN113384199B (zh) | 地刷及清洁设备 | |
| CN215993858U (zh) | 清洁头及清洁工具 | |
| CN220141566U (zh) | 一种表面清洁装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |