CN211895809U - 伸缩臂臂板限位缓冲机构 - Google Patents
伸缩臂臂板限位缓冲机构 Download PDFInfo
- Publication number
- CN211895809U CN211895809U CN201922183910.9U CN201922183910U CN211895809U CN 211895809 U CN211895809 U CN 211895809U CN 201922183910 U CN201922183910 U CN 201922183910U CN 211895809 U CN211895809 U CN 211895809U
- Authority
- CN
- China
- Prior art keywords
- telescopic
- telescopic arm
- fixed
- arm
- flexible arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Abstract
本实用新型公开了一种伸缩臂臂板限位缓冲机构,包括固定伸缩臂、活动伸缩臂、缓冲结构和伸缩结构,所述固定伸缩臂内部设有活动伸缩臂,所述固定伸缩臂内部位于活动伸缩臂伸出一端的两侧均焊接有缓冲结构,所述缓冲结构由伸缩杆、套筒和弹簧组成,所述固定伸缩臂内部靠近活动伸缩臂伸出一端的上下两侧均设有位置传感器,所述位置传感器一侧均设有电动阀门,所述固定伸缩臂上位于电动阀门外侧均设有固定框,所述固定框内部中部设有伸缩结构,所述伸缩结构另一端设有限位框。本实用新型缓冲和限位结构相辅相成,避免单一作用下冲击力过大损坏,延长其使用寿命,无需经常更换;伸缩臂伸出和缩回时均可进行缓冲,保护更完善。
Description
技术领域
本实用新型涉及伸缩臂缓冲技术领域,尤其涉及一种伸缩臂臂板限位缓冲机构。
背景技术
根据目前起重机吊具现状,在其伸缩臂伸缩到终点位置时,由于伸缩臂的惯性,会产生较大冲击。
目前市场上的伸缩臂缓冲装置实现缓冲的一种方法是在基本梁上增加缓冲垫或限位块的方法来减少吊具伸缩中的冲击,此种方法能起到一定缓冲作用,但缓冲垫及限位块由于长期承受冲击容易损坏,更换需要耗费一定的人力及物力;另一种方式是在吊具伸缩梁伸出到极限位置时,通过基本梁上增加的阻尼油缸来实现缓冲,此种方法只能实现吊具伸出时的缓冲,无法缓解吊具缩回时伸缩梁与基本梁之间的冲击。
针对相关技术中的问题,目前尚未提出有效的解决方案。
实用新型内容
本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种伸缩臂臂板限位缓冲机构。
为了实现上述目的,本实用新型采用了如下技术方案:
一种伸缩臂臂板限位缓冲机构,包括固定伸缩臂、活动伸缩臂、缓冲结构和伸缩结构,所述固定伸缩臂内部设有活动伸缩臂,所述活动伸缩臂和固定伸缩臂套接,所述固定伸缩臂内部位于活动伸缩臂伸出一端的两侧均焊接有缓冲结构,所述缓冲结构由伸缩杆、套筒和弹簧组成,所述固定伸缩臂内部靠近活动伸缩臂伸出一端的上下两侧均设有位置传感器,所述位置传感器一侧均设有电动阀门,所述固定伸缩臂上位于电动阀门外侧均设有固定框,所述固定框和固定伸缩臂外壁焊接连接,所述固定框内部中部设有伸缩结构,所述伸缩结构另一端设有限位框,所述限位框外侧两端焊接有同一个拉杆,所述拉杆贯穿固定框,且所述拉杆和固定框滑动连接。
优选的,所述缓冲结构的套筒和固定伸缩臂内壁焊接连接,所述套筒内部设有伸缩杆,所述伸缩杆和套筒套接,所述套筒两侧内壁均设有滑槽,所述伸缩杆底部两侧焊接有滑块,所述滑块位于滑槽内部,且所述滑块和滑槽滑动连接。
优选的,所述伸缩杆底部设有弹簧,所述弹簧一端和伸缩杆底部焊接连接,所述弹簧另一端和套筒内部底部焊接连接。
优选的,所述位置传感器可感应的最大距离和位置传感器与电动阀门之间的距离相等。
优选的,所述活动伸缩臂尾端两侧均焊接有凸块,所述凸块的宽度比限位框的宽度小3-5cm。
优选的,所述伸缩结构和缓冲结构结构相同,所述伸缩结构的套筒和固定框内壁焊接连接,所述伸缩结构的伸缩杆和限位框焊接连接。
优选的,所述固定伸缩臂内部远离活动伸缩臂伸出一端的上下两侧设有相同位置关系的位置传感器、电动阀门、限位框、固定框、伸缩结构和拉杆。
本实用新型的有益效果为:
1.本实用新型通过设置缓冲结构对活动伸缩臂的冲击力进行有效缓冲,当凸块将伸缩杆向套筒内压缩一段距离后位置传感器感应到凸块的靠近,将信号发送至控制系统实时控制电动阀门开启,伸缩结构缺少压力后回复至正常状态从而使限位框卡住凸块,完成对活动伸缩臂的限位,缓冲结构和限位结构相辅相成,避免单一作用下冲击力过大损坏缓冲结构和限位结构,延长其使用寿命,无需经常更换,节省人力物力。
2.本实用新型在固定伸缩臂的两端均设置了缓冲结构和限位结构,活动伸缩臂伸出和缩回时均可以达到缓冲效果,对伸缩臂的保护更完善。
附图说明
图1为本实用新型提出的一种伸缩臂臂板限位缓冲机构的结构示意图;
图2为本实用新型提出的一种伸缩臂臂板限位缓冲机构的伸缩臂伸出时缓冲限位示意图;
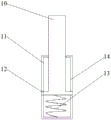
图3为本实用新型提出的一种伸缩臂臂板限位缓冲机构的缓冲结构或伸缩结构示意图;
图4为本实用新型提出的一种伸缩臂臂板限位缓冲机构的A处放大图。
图中:1、活动伸缩臂;2、缓冲结构;3、位置传感器;4、拉杆;5、固定框;6、固定伸缩臂;7、限位框;8、电动阀门;9、凸块;10、伸缩杆;11、套筒;12、滑块;13、弹簧;14、滑槽;15、伸缩结构。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
参照图1-4,一种伸缩臂臂板限位缓冲机构,包括固定伸缩臂6、活动伸缩臂1、缓冲结构2和伸缩结构15,固定伸缩臂6内部设有活动伸缩臂1,活动伸缩臂1和固定伸缩臂6套接,固定伸缩臂6内部位于活动伸缩臂1伸出一端的两侧均焊接有缓冲结构2,缓冲结构2由伸缩杆10、套筒11和弹簧13组成,固定伸缩臂6内部靠近活动伸缩臂1伸出一端的上下两侧均设有位置传感器3,位置传感器3一侧均设有电动阀门8,电动阀门8对伸缩结构15的伸缩杆10施加压力,固定伸缩臂6上位于电动阀门8外侧均设有固定框5,固定框5和固定伸缩臂6外壁焊接连接,固定框5内部中部设有伸缩结构15,伸缩结构15另一端设有限位框7,限位框7外侧两端焊接有同一个拉杆4,拉杆4贯穿固定框5,且拉杆4和固定框5滑动连接,拉杆4可拉回限位框7。
本实用新型中,缓冲结构2的套筒11和固定伸缩臂6内壁焊接连接,套筒11内部设有伸缩杆10,伸缩杆10和套筒11套接,套筒11两侧内壁均设有滑槽14,伸缩杆10底部两侧焊接有滑块12,滑块12位于滑槽14内部,且滑块12和滑槽14滑动连接。伸缩杆10底部设有弹簧13,弹簧13一端和伸缩杆10底部焊接连接,弹簧13另一端和套筒11内部底部焊接连接。位置传感器3可感应的最大距离和位置传感器3与电动阀门8之间的距离相等,凸块9到达电动阀门8正下方时,位置传感器3对其进行感应。活动伸缩臂1尾端两侧均焊接有凸块9,凸块9的宽度比限位框7的宽度小3-5cm,限位框7可以卡住凸块9的位置。伸缩结构15和缓冲结构2结构相同,伸缩结构15的套筒11和固定框5内壁焊接连接,伸缩结构15的伸缩杆10和限位框7焊接连接。固定伸缩臂6内部远离活动伸缩臂1伸出一端的上下两侧设有相同位置关系的位置传感器3、电动阀门8、限位框7、固定框5、伸缩结构15和拉杆4,可以对活动伸缩臂1缩回时的冲击力进行缓冲限位。
工作原理:活动伸缩臂1伸出或缩回时凸块9挤压伸缩杆10,伸缩杆10往套筒11内滑动,从而挤压弹簧13,弹簧13产生一个与压力相反方向的力对活动伸缩臂1的冲击力进行缓冲,当凸块9将伸缩杆10向套筒11内压缩一段距离直至凸块9位于电动阀门8正下方时,位置传感器3感应到凸块9的靠近,将信号发送至控制系统实时控制电动阀门8开启,伸缩结构15的伸缩杆10缺少压力后弹簧13带动伸缩杆10回复至正常状态从而使限位框7卡住凸块9,完成对活动伸缩臂1的限位,缓冲结构2和限位结构相辅相成,避免单一作用下冲击力过大损坏缓冲结构2和限位结构,延长其使用寿命,无需经常更换,节省人力物力;缓冲限位结束后可手动拉动拉杆4将限位框7拉回再关闭电动阀门8。
以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型,因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
Claims (7)
1.一种伸缩臂臂板限位缓冲机构,包括固定伸缩臂(6)、活动伸缩臂(1)、缓冲结构(2)和伸缩结构(15),其特征在于,所述固定伸缩臂(6)内部设有活动伸缩臂(1),所述活动伸缩臂(1)和固定伸缩臂(6)套接,所述固定伸缩臂(6)内部位于活动伸缩臂(1)伸出一端的两侧均焊接有缓冲结构(2),所述缓冲结构(2)由伸缩杆(10)、套筒(11)和弹簧(13)组成,所述固定伸缩臂(6)内部靠近活动伸缩臂(1)伸出一端的上下两侧均设有位置传感器(3),所述位置传感器(3)一侧均设有电动阀门(8),所述固定伸缩臂(6)上位于电动阀门(8)外侧均设有固定框(5),所述固定框(5)和固定伸缩臂(6)外壁焊接连接,所述固定框(5)内部中部设有伸缩结构(15),所述伸缩结构(15)另一端设有限位框(7),所述限位框(7)外侧两端焊接有同一个拉杆(4),所述拉杆(4)贯穿固定框(5),且所述拉杆(4)和固定框(5)滑动连接。
2.根据权利要求1所述的一种伸缩臂臂板限位缓冲机构,其特征在于,所述缓冲结构(2)的套筒(11)和固定伸缩臂(6)内壁焊接连接,所述套筒(11)内部设有伸缩杆(10),所述伸缩杆(10)和套筒(11)套接,所述套筒(11)两侧内壁均设有滑槽(14),所述伸缩杆(10)底部两侧焊接有滑块(12),所述滑块(12)位于滑槽(14)内部,且所述滑块(12)和滑槽(14)滑动连接。
3.根据权利要求2所述的一种伸缩臂臂板限位缓冲机构,其特征在于,所述伸缩杆(10)底部设有弹簧(13),所述弹簧(13)一端和伸缩杆(10)底部焊接连接,所述弹簧(13)另一端和套筒(11)内部底部焊接连接。
4.根据权利要求1所述的一种伸缩臂臂板限位缓冲机构,其特征在于,所述位置传感器(3)可感应的最大距离和位置传感器(3)与电动阀门(8)之间的距离相等。
5.根据权利要求1所述的一种伸缩臂臂板限位缓冲机构,其特征在于,所述活动伸缩臂(1)尾端两侧均焊接有凸块(9),所述凸块(9)的宽度比限位框(7)的宽度小3-5cm。
6.根据权利要求1所述的一种伸缩臂臂板限位缓冲机构,其特征在于,所述伸缩结构(15)和缓冲结构(2)结构相同,所述伸缩结构(15)的套筒(11)和固定框(5)内壁焊接连接,所述伸缩结构(15)的伸缩杆(10)和限位框(7)焊接连接。
7.根据权利要求1所述的一种伸缩臂臂板限位缓冲机构,其特征在于,所述固定伸缩臂(6)内部远离活动伸缩臂(1)伸出一端的上下两侧设有相同位置关系的位置传感器(3)、电动阀门(8)、限位框(7)、固定框(5)、伸缩结构(15)和拉杆(4)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201922183910.9U CN211895809U (zh) | 2019-12-09 | 2019-12-09 | 伸缩臂臂板限位缓冲机构 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201922183910.9U CN211895809U (zh) | 2019-12-09 | 2019-12-09 | 伸缩臂臂板限位缓冲机构 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN211895809U true CN211895809U (zh) | 2020-11-10 |
Family
ID=73299702
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201922183910.9U Active CN211895809U (zh) | 2019-12-09 | 2019-12-09 | 伸缩臂臂板限位缓冲机构 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN211895809U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115107978A (zh) * | 2022-07-29 | 2022-09-27 | 广东逸动科技有限公司 | 伸缩装置、推进器以及船舶 |
-
2019
- 2019-12-09 CN CN201922183910.9U patent/CN211895809U/zh active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115107978A (zh) * | 2022-07-29 | 2022-09-27 | 广东逸动科技有限公司 | 伸缩装置、推进器以及船舶 |
| CN115107978B (zh) * | 2022-07-29 | 2023-08-11 | 广东逸动科技有限公司 | 伸缩装置、推进器以及船舶 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN211895809U (zh) | 伸缩臂臂板限位缓冲机构 | |
| CN108758090A (zh) | 一种槽钢防震管夹 | |
| CN203318079U (zh) | 汽车弹性悬架刚性锁止装置 | |
| CN107235272B (zh) | 一种侧装垃圾车倾倒装置 | |
| CN210031800U (zh) | 一种打桩机的缓冲机构 | |
| CN206824895U (zh) | T形三通焊接治具 | |
| CN201473953U (zh) | 用于液压静力压桩机的可自动调心夹桩装置 | |
| CN210632693U (zh) | 一种铝板加工用折弯装置 | |
| CN205419393U (zh) | 一种有减震功能的电梯安全钳 | |
| CN101590579B (zh) | 一种钢轨对焊的夹持装置 | |
| CN209647837U (zh) | 一种汽车配件生产的夹持装置 | |
| CN205894143U (zh) | 一种挖掘机铲斗工字架 | |
| CN106869218B (zh) | 装载机用可偏转抱叉 | |
| CN213036719U (zh) | 一种连续斗式输送机链条 | |
| CN208268305U (zh) | 一种用于开采矿石机械的抗震器 | |
| CN207772009U (zh) | 一种全自动开槽机 | |
| CN210789757U (zh) | 一种焊线机的防撞装置 | |
| CN206438262U (zh) | 一种土工布经编机用送经制动装置 | |
| CN203511202U (zh) | 一种弹簧拖钩装置 | |
| CN112682606B (zh) | 内置弹性连接结构的波纹管补偿器 | |
| CN210423249U (zh) | 浮动式感应器安装装置 | |
| CN212708780U (zh) | 一种液压式下拉杆限位装置 | |
| CN209409926U (zh) | 一种智能行车辅助避障系统的减震装置 | |
| CN210490585U (zh) | 一种电机顶丝径向压紧装置 | |
| CN216765570U (zh) | 一种桥梁搭建用的桥梁伸缩装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |