CN211733095U - Cam carrying mechanism for soft-packaged lithium battery cell - Google Patents
Cam carrying mechanism for soft-packaged lithium battery cell Download PDFInfo
- Publication number
- CN211733095U CN211733095U CN201922159038.4U CN201922159038U CN211733095U CN 211733095 U CN211733095 U CN 211733095U CN 201922159038 U CN201922159038 U CN 201922159038U CN 211733095 U CN211733095 U CN 211733095U
- Authority
- CN
- China
- Prior art keywords
- sliding
- plate
- cam
- soft
- lithium battery
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 title claims abstract description 52
- WHXSMMKQMYFTQS-UHFFFAOYSA-N Lithium Chemical compound [Li] WHXSMMKQMYFTQS-UHFFFAOYSA-N 0.000 title claims abstract description 20
- 229910052744 lithium Inorganic materials 0.000 title claims abstract description 20
- 239000003638 chemical reducing agent Substances 0.000 claims description 10
- 238000004806 packaging method and process Methods 0.000 claims 1
- 238000004519 manufacturing process Methods 0.000 abstract description 11
- 239000000463 material Substances 0.000 description 12
- 238000000034 method Methods 0.000 description 5
- 230000007723 transport mechanism Effects 0.000 description 3
- 238000007599 discharging Methods 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 238000005299 abrasion Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 230000003578 releasing effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
Images



Landscapes
- Primary Cells (AREA)
Abstract
The utility model discloses a cam carrying mechanism of soft package lithium cell, including the fixed plate, still include cam linkage, cam linkage's horizontal sliding plate and fixed plate sliding connection, install the cam deflector that has the guide way on the fixed plate, horizontal sliding plate links to each other with the bearing follower, the bearing follower moves along the guide way, still links to each other with the swing slide arm through the pivot on the horizontal sliding plate, the pivot is sliding connection with the swing slide arm, the swing slide arm drives after slowing down through the motor; the sucking disc mechanism is fixed on the transverse sliding plate and used for clamping a workpiece, and comprises a support, a mounting plate is connected below the support, and a suction nozzle is arranged on the mounting plate. The device utilizes the characteristics of cam self-locking and reciprocating motion, has high carrying speed, high efficiency and high repeated positioning precision, can save design and production cost, and can improve production benefits.
Description
Technical Field
The utility model relates to a work piece transport mechanism improved design technical field especially relates to a cam transport mechanism of soft packet of lithium cell.
Background
The method that module and cylinder combined together is generally adopted in traditional production line material handling, can satisfy the requirement to the little production line material handling of inefficiency. For the transportation of lithium cells and the like of automobile power soft package battery module production line equipment, the defect of the traditional transportation mode of combining the module and the air cylinder is quite obvious, and the transportation speed of the lithium cells is high, the efficiency is high, and the repeated positioning precision is high; and the requirement above is difficult to reach to traditional transport mode, adopts many modules to establish ties or the customization module still can not satisfy, and this takt time that just causes traditional transport mode is slower. Moreover, by adopting multi-module series control, more motors, electric control systems and complicated control programs are inevitably added to the equipment. And the customized module is adopted, so that the manufacturing cost is higher and the delivery cycle is longer. Therefore, the module and the cylinder assembly can carry most of the materials of the small production line; however, for large non-standard equipment, more accessories and components are required, and the design, manufacture and assembly costs are higher.
SUMMERY OF THE UTILITY MODEL
An object of the utility model is to overcome prior art's not enough, provide a cam transport mechanism of soft packet of lithium cell, through the characteristic of application cam auto-lock nature and reciprocating motion, transport speed is fast, and is efficient, and repeated positioning accuracy is high, can practice thrift design and manufacturing cost, can improve the productivity effect again.
In order to achieve the above purpose, the utility model discloses a technical scheme is: the cam carrying mechanism for the soft-packaged lithium battery core comprises a fixed plate and a cam link mechanism, wherein a transverse sliding plate of the cam link mechanism is connected with the fixed plate in a sliding mode, a cam guide plate with a guide groove is mounted on the fixed plate, the transverse sliding plate is connected with a bearing follower, the bearing follower moves along the guide groove, the transverse sliding plate is also connected with a swinging sliding arm through a rotating shaft, the rotating shaft is connected with the swinging sliding arm in a sliding mode, and the swinging sliding arm is driven after the speed of the swinging sliding arm is reduced through a motor; and the sucker mechanism is fixed on the transverse sliding plate and is used for clamping a workpiece.
The transverse sliding plate is connected with the lifting plate through a horizontal sliding mechanism, and the lifting plate is connected with the fixed plate through a lifting sliding mechanism.
The horizontal sliding mechanism and the lifting sliding mechanism are both composed of a sliding rail and a sliding block matched with the sliding rail.
The bearing follower comprises a rod piece and a roller, wherein one end of the rod piece is fixed on the transverse sliding plate, the other end of the rod piece is rotatably connected with the roller, and the roller is matched with the guide groove.
The rotating shaft is rotatably connected with a transverse sliding plate or a swinging sliding arm.
The rotating shaft is connected with a sliding block on the swinging sliding arm, the sliding block is connected with a guide rail in a sliding mode, and the guide rail is fixed on the swinging sliding arm.
The swing sliding arm is rotatably connected with the main board, the motor is installed on the main board, the motor is connected with the speed reducer, and the shaft of the speed reducer is coaxially connected with the shaft of the swing sliding arm.
The motor is a stepping motor, and the speed reducer is of a gear meshing structure.
The sucking disc mechanism comprises a support, a mounting plate is connected below the support, and a suction nozzle is arranged on the mounting plate.
The guide groove comprises a straight groove and arc-shaped grooves positioned on two sides of the straight groove.
Compared with the prior art, the beneficial effects of the utility model are that: this device utilizes cam auto-lock nature and reciprocating motion's characteristic, and the application does not need many modules to establish ties or customization module at the electric core transport station in the soft packet of battery module line of automotive power, and is higher than traditional transport mode efficiency, and speed is faster, can more accurate guarantee the requirement of repeated positioning accuracy, the number of the motor control system that has significantly reduced has promoted design and assembly efficiency, has improved the lead cycle of product.
Drawings
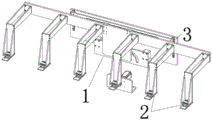
Fig. 1 is a perspective view of the present invention;
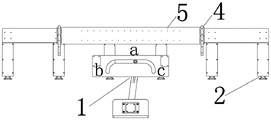
FIG. 2 is a view showing the structure of FIG. 1 with the fixing plate removed;
FIG. 3 is a rear view of FIG. 2;
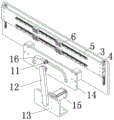
fig. 4 is a schematic view of the cam linkage mechanism of the present invention;
FIG. 5 is a view showing the construction of the lateral sliding panel shown in FIG. 4 with the lateral sliding panel removed;
FIG. 6 is a structural view of the swinging sliding arm of the present invention;
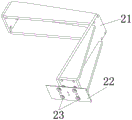
fig. 7 is a structural view of the suction cup mechanism of the present invention.
The labels in the figures are: 1. a cam linkage mechanism; 2. a suction cup mechanism; 3. a fixing plate; 4. a lifting sliding mechanism; 5. a lifting plate; 6. a horizontal sliding mechanism; 10. a transverse sliding plate; 11. a bearing follower; 12. swinging the sliding arm; 13. a main board; 14. a motor; 15. a cam guide plate; 16. a guide groove; 17. a guide rail; 18. a rotating shaft; 21. a support; 22. mounting a plate; 23. a suction nozzle.
Detailed Description
The following detailed description is provided to further explain the technical features and advantages of the present invention by referring to the accompanying drawings in combination with the embodiments.
As shown in fig. 1-7, the cam carrying mechanism for soft-packaged lithium battery cells of the present invention comprises a fixed plate 3 and a cam link mechanism 1, wherein a transverse sliding plate 10 of the cam link mechanism is slidably connected to the fixed plate, a cam guide plate 15 having a guide groove 16 is mounted on the fixed plate, the transverse sliding plate is connected to a bearing follower 11, the bearing follower moves along the guide groove, the transverse sliding plate is further connected to a swinging sliding arm 12 through a rotating shaft 18, the rotating shaft is slidably connected to the swinging sliding arm, and the swinging sliding arm is driven after being decelerated by a motor 14; the sucking disc mechanism 2 is fixed on the transverse sliding plate and used for clamping the workpiece, and the sucking disc mechanism or other mechanisms capable of clamping the workpiece are not limited in the above, and the device can also be applied to conveying mechanisms in other industries.
Furthermore, the horizontal sliding plate is connected with a lifting plate 5 through a horizontal sliding mechanism 6, the lifting plate is connected with a fixed plate through a lifting sliding mechanism 4, and the horizontal sliding mechanism and the lifting sliding mechanism are both sliding rails and sliding blocks matched with the sliding rails.
Furthermore, the bearing follower comprises a rod piece and a roller, wherein one end of the rod piece is fixed on the transverse sliding plate, the other end of the rod piece is rotatably connected with the roller, and the roller is matched with the guide groove.
Furthermore, the pivot rotationally connect horizontal sliding plate or sway the slide arm, the pivot link to each other with the slider on the slide arm that sways, slider and guide rail 17 sliding connection, the guide rail is fixed on swaying the slide arm, sway the slide arm and rotationally link to each other with mainboard 13, install the motor on the mainboard, the speed reducer is connected to the motor, the axle of speed reducer and the axle coaxial linking of swaying the slide arm, the motor be step motor, the speed reducer is the gear engagement structure.
Furthermore, the sucking disc mechanism comprises a support 21, a mounting plate 22 is connected below the support, a plurality of suction nozzles 23 are arranged on the mounting plate, and in order to ensure the accuracy of the vertical movement of the suction nozzles, four guide shafts and a support are respectively added between the mounting plate and the support to perform axial guiding. The guide groove comprises a straight groove and arc-shaped grooves positioned on two sides of the straight groove, and the specific size design is determined according to production requirements.
The working principle of the device of the utility model is that when the equipment is in a material preparation state, the roller of the bearing follower stops on the guide groove (the middle position a) in the cam guide plate; when a production line workpiece reaches a material preparation area, an induction device sends an instruction to a motor to drive a swinging sliding arm to swing up and down, the radial swing of the swinging sliding arm is transmitted through a guide rail and a sliding block to drive a transverse sliding plate to move in a translation mode, because one end of a bearing follower is fixed on the transverse sliding plate and the other end of the bearing follower is matched with a guide groove of a cam guide plate, a roller of the bearing follower rolls under the swing action of the transverse sliding plate, and the transverse sliding plate reaches a material taking position (a left side position b); after the workpiece grabbing action is finished, the roller of the bearing follower moves to the middle position a firstly and then to the right position c to finish the discharging action under the driving of the motor. The roller of the bearing follower reciprocates along the guide groove track of the cam guide plate to complete the whole process of the scheduled material grabbing, conveying and discharging (the running track is shown in figure 3: a-b-a-c-a).
In order to ensure the accuracy and precision requirement of the whole movement process, two lifting sliding mechanisms are respectively arranged on two sides of the fixed plate for longitudinal guide, and in order to ensure the smooth and accurate translation of the transverse sliding plate, two horizontal sliding mechanisms are additionally arranged for transverse guide. The material grabbing part mainly can refer to fig. 7, the grabbing and releasing actions of the workpieces are mainly controlled through the vacuum chuck, the cam carrying mechanism is only applied to the material grabbing part, the cam tracks can be increased for stations with more stations, and the carrying actions can be completed.
The cam connecting rod technology of the device changes the traditional lithium battery cell carrying method, and accurate and efficient material carrying is achieved by means of the self-locking property and the reciprocating motion characteristic of the cam. The reciprocating movement in the material handling process can be effectively controlled only by designing and checking the reciprocating distance of the cam. To reduce frictional wear, a guide rail assembly is mounted at the end of the link and the roller and guide rail are locked into the transverse sliding plate with the other end of the roller being mounted in the cam groove. The sliding friction between the driven part and the cam is changed into rolling friction through the driving of the motor, so that the friction and the abrasion are small, the large power can be transmitted, the stress is stable, the structure is simple and compact, and the occupied space is small. The motor, the speed reducer, and the matched sensor and software thereof are all the prior art or materials, and the technical personnel can directly purchase or order from the market according to the required product model and specification.
The electrical components are electrically connected with an external master controller and industrial electricity, and the master controller can be a conventional known device for controlling a computer and the like.
It will be understood that when an element is referred to as being "secured to" another element, it can be directly on the other element or intervening elements may also be present. When an element is referred to as being "mounted on" another element, it can be directly mounted on the other element or intervening elements may also be present. When an element is referred to as being "connected" to another element, it can be directly connected to the other element or intervening elements may also be present.
The present invention is described in detail in the above embodiments, and it should be understood that the described embodiments are not limited to the embodiments of the present invention. Based on the embodiments in the present invention, all other embodiments obtained by a person skilled in the art without creative work belong to the protection scope of the present invention.
Claims (10)
1. The cam carrying mechanism for the soft-packaged lithium battery core comprises a fixed plate and is characterized by further comprising a cam link mechanism, wherein a transverse sliding plate of the cam link mechanism is connected with the fixed plate in a sliding mode, a cam guide plate with a guide groove is mounted on the fixed plate, the transverse sliding plate is connected with a bearing follower, the bearing follower moves along the guide groove, the transverse sliding plate is further connected with a swinging sliding arm through a rotating shaft, the rotating shaft is connected with the swinging sliding arm in a sliding mode, and the swinging sliding arm is driven after the speed of the swinging sliding arm is reduced through a motor; and the sucker mechanism is fixed on the transverse sliding plate and is used for clamping a workpiece.
2. The cam conveying mechanism for the soft-packaged lithium battery cells according to claim 1, wherein the transverse sliding plate is connected with the lifting plate through a horizontal sliding mechanism, and the lifting plate is connected with the fixed plate through a lifting sliding mechanism.
3. The cam carrying mechanism for the soft-packaged lithium battery cells according to claim 2, wherein the horizontal sliding mechanism and the lifting sliding mechanism are both composed of sliding rails and sliding blocks matched with the sliding rails.
4. The cam carrying mechanism for the soft-packaged lithium battery cells according to claim 1, wherein the bearing follower comprises a rod member and a roller, one end of the rod member is fixed on the transverse sliding plate, the other end of the rod member is rotatably connected with the roller, and the roller is matched with the guide groove.
5. The cam conveying mechanism for the soft-packaged lithium battery cells according to claim 1, wherein the rotating shaft is rotatably connected with a transverse sliding plate or a swinging sliding arm.
6. The cam carrying mechanism for the soft-packaged lithium battery cores according to claim 1, wherein the rotating shaft is connected with a sliding block on a swinging sliding arm, the sliding block is slidably connected with a guide rail, and the guide rail is fixed on the swinging sliding arm.
7. The cam carrying mechanism for the soft-package lithium battery cell as claimed in claim 1, wherein the swinging sliding arm is rotatably connected with a main board, a motor is mounted on the main board, the motor is connected with a speed reducer, and a shaft of the speed reducer is coaxially connected with a shaft of the swinging sliding arm.
8. The cam carrying mechanism for the soft-packaged lithium battery cores according to claim 7, wherein the motor is a stepping motor, and the speed reducer is in a gear meshing structure.
9. The cam carrying mechanism for the soft-packaging lithium battery cells according to claim 8, wherein the sucking disc mechanism comprises a support, a mounting plate is connected below the support, and a suction nozzle is arranged on the mounting plate.
10. The cam handling mechanism for the soft-packaged lithium battery cells according to any one of claims 1 to 9, wherein the guide groove comprises a straight groove and arc-shaped grooves located on two sides of the straight groove.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201922159038.4U CN211733095U (en) | 2019-12-05 | 2019-12-05 | Cam carrying mechanism for soft-packaged lithium battery cell |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201922159038.4U CN211733095U (en) | 2019-12-05 | 2019-12-05 | Cam carrying mechanism for soft-packaged lithium battery cell |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN211733095U true CN211733095U (en) | 2020-10-23 |
Family
ID=72876629
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201922159038.4U Active CN211733095U (en) | 2019-12-05 | 2019-12-05 | Cam carrying mechanism for soft-packaged lithium battery cell |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN211733095U (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112978371A (en) * | 2021-02-26 | 2021-06-18 | 苏州锦浩翔自动化有限公司 | Equidistant pulling and inserting mechanism |
| CN113719595A (en) * | 2021-08-11 | 2021-11-30 | 弥费实业(上海)有限公司 | Transmission, double-linkage and anti-shaking and anti-falling device, crown block system and wafer carrying method |
-
2019
- 2019-12-05 CN CN201922159038.4U patent/CN211733095U/en active Active
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112978371A (en) * | 2021-02-26 | 2021-06-18 | 苏州锦浩翔自动化有限公司 | Equidistant pulling and inserting mechanism |
| CN112978371B (en) * | 2021-02-26 | 2023-03-14 | 苏州锦浩翔自动化有限公司 | Equidistant pulling and inserting mechanism |
| CN113719595A (en) * | 2021-08-11 | 2021-11-30 | 弥费实业(上海)有限公司 | Transmission, double-linkage and anti-shaking and anti-falling device, crown block system and wafer carrying method |
| CN113719595B (en) * | 2021-08-11 | 2022-03-01 | 弥费实业(上海)有限公司 | Transmission, double-linkage and anti-shaking and anti-falling device, crown block system and wafer carrying method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN201960197U (en) | Automatic shearing line for special-shaped plates | |
| CN109128851B (en) | Flexible automatic production line for punching, welding or bonding automobile exterior trimming parts | |
| CN113003202B (en) | 180-degree carrying mechanism | |
| CN203526380U (en) | Mechanical arm conveying device achieving on-line automatic stamping through multiple stamping devices | |
| CN203566704U (en) | Both-way conveying manipulator | |
| CN202542490U (en) | Transporting and stacking robot | |
| CN203529443U (en) | Manipulator handling system | |
| CN211733095U (en) | Cam carrying mechanism for soft-packaged lithium battery cell | |
| CN108996235B (en) | Transfer mechanism and conveying system | |
| CN202272582U (en) | Automatic yarn taking carrier of bobbin winder | |
| CN205187198U (en) | Bearing roller line manipulator | |
| CN202964649U (en) | Two-axis manipulator used on stamping production line | |
| CN216461335U (en) | Transition transfer device between punching machines | |
| CN212706756U (en) | Gantry type mechanical arm | |
| CN211366104U (en) | Vertical transfer machine with high conveying efficiency | |
| CN202555716U (en) | Conveying mechanism of large-size three-dimensional manipulator | |
| CN113753572A (en) | Cam carrying mechanism | |
| CN111546370B (en) | Coupler disassembling and assembling manipulator | |
| CN211965801U (en) | Compact press pay-off automation equipment | |
| CN106424409A (en) | Multi-speed conveying mechanism for punching board | |
| CN206276824U (en) | Punching press plate speed conveying mechanism | |
| CN113275644A (en) | Plate processing equipment capable of synchronously processing and transporting | |
| CN203510220U (en) | Synchronous belt transmission structure of Cartesian coordinate robot | |
| CN214455236U (en) | Stacking mechanism for automatic detection loading of flat car | |
| CN221459128U (en) | Transfer mechanism |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| PE01 | Entry into force of the registration of the contract for pledge of patent right | ||
| PE01 | Entry into force of the registration of the contract for pledge of patent right |
Denomination of utility model: A cam handling mechanism for soft pack lithium battery cells Granted publication date: 20201023 Pledgee: Heyuan branch of China Guangfa Bank Co.,Ltd. Pledgor: Guangdong Haosheng Intelligent Equipment Co.,Ltd. Registration number: Y2024980016344 |