CN210790955U - 一种盆栽转移机器人控制系统 - Google Patents
一种盆栽转移机器人控制系统 Download PDFInfo
- Publication number
- CN210790955U CN210790955U CN201921850640.6U CN201921850640U CN210790955U CN 210790955 U CN210790955 U CN 210790955U CN 201921850640 U CN201921850640 U CN 201921850640U CN 210790955 U CN210790955 U CN 210790955U
- Authority
- CN
- China
- Prior art keywords
- steering wheel
- steering
- bottom plate
- steering engine
- support column
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Landscapes
- Manipulator (AREA)
Abstract
本实用新型公开了一种盆栽转移机器人控制系统,包括移动底座、安装在移动底座上的云台、安装在云台上的机械臂、安装在机械臂伸出端的机械爪和主控模块,云台包括舵盘和带动舵盘水平转动的舵机A,所述机械臂包括第一支撑柱、第二支撑柱、舵机B、舵机C和舵机D,机械爪包括与舵机D连接的安装架和弧形夹紧件,底板上还设有摄像头和循迹模块。本实用新型通过设置的云台、机械臂、机械爪和主控模块,可通过主控模块控制机械臂带动机械爪方便地抓取盆栽,然后通过安装在底板上的循迹模块,可准确的将载有盆栽的机器人移动至目标区域,同时通过摄像头连接的机器视觉模块,可对盆栽进行判断,使盆栽可放入对应的目标区内。
Description
技术领域
本实用新型涉及农业竞赛机器人领域,特别是涉及一种盆栽转移机器人控制系统。
背景技术
随着农业机械智能化的发展,越来越多人工的劳动可被机器人所代替,而检验机器人是否符合农业的方法是通过机器人挑战赛来判断,现有的机器人挑战赛一般是在一个独立的比赛场地内,该比赛场地内设有机器人出发区、初始放置区和转移目标区,并且还设有引导线连接初始放置区和多个转移目标区,为机器人的行进路线提供参考,需要控制机器人将盆栽从检验时需要将盆栽从初始放置区移动到转移目标区,通过完成的时间和精准度来判断盆栽的机器人的性能。
现有转移机器人在移动时由于需要往复的移动,增加了盆栽转运的时间,从而导致盆栽的转移效率低。另外,现有的盆栽转运时难以分辨盆栽的种类。
发明内容
本实用新型的目的在于提供一种转运效率高且可分类的盆栽转移机器人控制系统。
本实用新型的目的是通过以下技术方案实现的:
一种盆栽转移机器人控制系统,包括移动底座、安装在移动底座上的云台、安装在云台上的机械臂、安装在机械臂伸出端的机械爪和主控模块,所述移动底座包括底板和多个带动底板移动的全向轮,所述底板上设有驱动每个全向轮移动的带有控制器的电机,所述底板中部安装有云台,所述云台包括舵盘和带动舵盘水平转动的带有控制器的舵机A,所述舵盘通过轴承可转动地安装在底板上方,底板中部加工有安装舵机A的安装孔,所述舵机A的输出轴与舵盘连接,舵盘表面安装有机械臂,所述机械臂包括第一支撑柱、第二支撑柱、舵机B、舵机C和舵机D,所述舵机B、舵机C和舵机D均带有控制器,所述第一支撑柱和第二支撑的端部通过舵机C铰接,第一支撑柱远离舵机C的一端通过舵机B铰接在舵盘上,第二支撑柱远离舵机C的一端通过舵机D与机械爪连接,所述机械爪包括与舵机D连接的安装架和沿安装架中线对称铰接安装架上的弧形夹紧件,两个弧形夹紧件相对的侧壁上加工有相互啮合的齿牙,所述安装架内设有带动弧形夹紧件开合的带有控制器的舵机E,电机、舵机A、舵机B、舵机C、舵机D和舵机E均与主控模块连接,所述底板上还设有与主控模块连接的用于寻找盆栽的摄像头和检测地面引导线的循迹模块。
所述主控模块内设有机器视觉模块,机器视觉模块用于处理摄像头拍摄的图像。
所述循迹模块包括至少两个灰度传感器和光电开关,灰度传感器用于检测地面引导线,光电开关用于检测盆栽位置。
所述弧形夹紧件的内侧安装有检测机械爪夹紧的压力传感器,所述压力传感器与主控模块连接。
所述底板上设有由多块挡板围成的多个置物区。
本实用新型具有如下效果:
(1)通过设置的云台、机械臂、机械爪和主控模块,可通过主控模块控制机械臂带动机械爪方便地抓取盆栽,然后通过安装在底板上的循迹模块,可准确的将载有盆栽的机器人移动至目标区域,同时通过摄像头连接的机器视觉模块,可对盆栽进行判断,使盆栽可放入对应的目标区内;
(2)通过在底板上设置多个呈环形的全向轮,并在底板上安装带动全向轮行进的电机和控制电机工作的驱动器,使全向轮可根据主控模块输出的信号启停;
(3)通过设置多个与主控模块连接的舵机,使机械臂配合云台可带动机械爪在工作平面内做复杂的动作,增加了机械爪的抓取范围,从而提高了抓取效率;
(4)通过在弧形夹紧件的内壁上设置薄膜压力传感器,防止弧形夹紧件的压力过大夹碎盆栽;
(5)通过在底板上设置多个置物区,使机器人一次性可转移多盆盆栽,提高了盆栽转移的效率。
附图说明
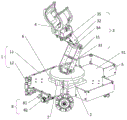
图1为本实用新型的结构示意图。
图2为本实用新型主控模块的连接示意图。
图3为本实用新型云台的爆炸图。
图4为本实用新型机械爪的结构示意图。
图5为赛道的俯视图。
附图标记:1、移动底座;11、底板;12、全向轮;13、电机;2、云台;21、舵机A;22、舵盘;23、轴承;24、安装孔;3、机械臂;31、第一支撑柱;32、第二支撑柱;33、舵机B;34、舵机C;35、舵机D;4、机械爪;41、安装架;42、弧形夹紧件;43、齿牙;44、舵机E;45、压力传感器;5、挡板;51、置物区;6、主控模块;61、机器视觉模块;7、摄像头;8、循迹模块;81、灰度传感器;82、光电开关;91、出发区;92、初始放置区;93、转移目标区;94、引导线。
具体实施方式
实施例
如图1~图4所示,本实施例提供的盆栽转移机器人控制系统包括移动底座1、安装在移动底座1上的云台2、安装在云台2上的机械臂3、安装在机械臂3伸出端的机械爪4和安装在移动底座1上的主控模块6,所述移动底座1包括底板11和多个带动底板11移动的全向轮12,所述底板11上设有与驱动每个全向轮12移动且带有控制器的电机13,所述底板11中部安装有云台2,所述云台2包括舵盘22和带动舵盘22水平转动的且带有控制器的舵机A21,所述舵盘22通过轴承23可转动地安装在底板11上方,底板11中部加工有安装舵机A21的安装孔24,所述舵机A21的输出轴与舵盘22连接,舵盘22表面安装有机械臂3,所述机械臂3包括第一支撑柱31、第二支撑柱32、舵机B33、舵机C34和舵机D35,所述舵机B33、舵机C34和舵机D35均带有控制器,所述第一支撑柱31和第二支撑的端部通过舵机C34铰接,第一支撑柱31远离舵机C34的一端通过舵机B33铰接在舵盘22上,第二支撑柱32远离舵机C34的一端通过舵机D35与机械爪4连接,所述机械爪4包括与舵机D35连接的安装架41和沿安装架41中线对称铰接安装架41上的弧形夹紧件42,两个弧形夹紧件42相对的侧壁上加工有相互啮合的齿牙43,所述安装架41内设有带动弧形夹紧件42开合的带有控制器的舵机E44,弧形夹紧件42的内侧安装有检测机械爪4夹紧的压力传感器45,所述压力传感器45与主控模块6连接,电机13、舵机A21、舵机B33、舵机C34、舵机D35和舵机E44均与主控模块6连接,且连接方式采用现有的、且成熟的连接方法,所述主控模块6采用STM32F1系列的芯片控制模块,优选为STM32F103芯片的控制模块,所述底板11上还设有与主控模块6连接的用于寻找盆栽的摄像头7和为移动底座1寻找线路的循迹模块8,所述摄像头7拍摄的图像传送至主控模块6,通过主控模块内的机器视觉模块61处理,机器视觉模块61通过现有的OpenMV来识别盆栽的种类,识别完成后主控模块6通过机械臂3带动机械爪4抓取盆栽。所述循迹模块8包括多个安装在底板11底面上用于检测引导线94的灰度传感器81和用于检测盆栽位置的光电开关82,底板11的每端均设有两个灰度传感器81,两个灰度传感器81之间的间距与引导线的宽度相等,通过灰度传感器81检测地面的引导线94位置为机器人移动提供路径参考,灰度传感器81的数量还可增加,灰度传感器81的数量越多,机器人移动更精确,光电开关82检测到盆栽后主控模块6控制机器人停下。底板11上设有由多块挡板5围成的多个置物区51,所述底板11上还设有为机器人提供能量的电源,主控模块6控制机械臂转动的程序是本领域成熟的现有技术。
本实用新型的使用方法是:
如图5所示,使用时灰度传感器81检测引导线94的位置,并将检测的数据发送给主控模块6,主控模块6根据灰度传感器81反馈的数据通过对应的驱动器14驱动电机13,电机13带动全向轮12转动,用于控制移动底座1从出发区91沿引导线94向初始放置区92移动,若是灰度传感器81未检测到引导线94位置,此时主控模块6会通过驱动器14控制电机13带动全向轮12转动,用于摆正移动底座1,当移动底座1上的光电开关82检测到盆栽后,主控模块6根据预先设定的程序通过驱动器14使电机13停止,用于停下移动底座1,随后摄像头7拍摄盆栽的形状,并将拍摄的图像传送至主控模块6,通过主控模块6上的机器视觉模块61判断盆栽的种类,随后主控模块6控制舵机A21、舵机B33、舵机C34、舵机D35和舵机E44联动,联动时:舵机A21带动舵盘22水平转动,使机械臂3的伸出方向与盆栽对齐,随后,舵机B33和舵机C34带动第一支撑柱31和第二支撑柱32转动,用于带动安装在机械臂3上的机械爪4朝向盆栽移动,舵机D35用于控制机械爪4与地面水平,以防止弧形夹紧件42与地面发生碰撞,此时机械爪4处于张开状态,当摄像头7拍摄到盆栽位于两个弧形夹紧件42之间后,舵机E44带动两个弧形夹紧件42通过齿牙43沿铰接处转动,将盆栽夹住,盆栽被夹住后,安装在弧形夹紧件42上的压力传感器45检测盆栽的力量,以防止盆栽被压迫,同时主控模块6根据压力传感器45反馈的数据控制机械臂3带动机械爪4收回,此时机械爪4将盆栽夹起后放置在对应的置物区51内,置物区51预先根据编写的程序进行分类,接着主控模块6重复上述步骤带动移动底座1移动,当置物区51的盆栽装夹完成后,主控模块6带动移动底座1朝向转移目标区93,并根据预先设定的程序,通过云台2、机械臂3和机械爪4将置物区51上的盆栽放入对应的目标区域,最后重复上述步骤直至盆栽转移完成。
由于移动底座1通过全向轮12移动,因此可使移动底座1在赛场平移,从而可保证移动底座1的相对位置,降低了主控模块6的编程难度。
以上所述仅是本实用新型优选的实施方式,但本实用新型的保护范围并不局限于此,任何基于本实用新型所提供的技术方案和发明构思进行的改造和替换都应涵盖在本实用新型的保护范围内。
Claims (5)
1.一种盆栽转移机器人控制系统,其特征在于:包括移动底座、云台、机械臂、机械爪和主控模块,所述移动底座包括底板和多个带动底板移动的全向轮,所述底板上设有驱动每个全向轮移动的带有控制器的电机,所述底板中部安装有云台,所述云台包括舵盘和带动舵盘水平转动的带有控制器的舵机A,所述舵盘通过轴承可转动地安装在底板上方,底板中部加工有安装舵机A的安装孔,所述舵机A的输出轴与舵盘连接,舵盘表面安装有机械臂,所述机械臂包括第一支撑柱、第二支撑柱、舵机B、舵机C和舵机D,所述舵机B、舵机C和舵机D均带有控制器,所述第一支撑柱和第二支撑的端部通过舵机C铰接,第一支撑柱远离舵机C的一端通过舵机B铰接在舵盘上,第二支撑柱远离舵机C的一端通过舵机D与机械爪连接,所述机械爪包括与舵机D连接的安装架和沿安装架中线对称铰接安装架上的弧形夹紧件,两个弧形夹紧件相对的侧壁上加工有相互啮合的齿牙,所述安装架内设有带动弧形夹紧件开合的带有控制器的舵机E,电机、舵机A、舵机B、舵机C、舵机D和舵机E均与主控模块连接,所述底板上还设有与主控模块连接的用于寻找盆栽的摄像头和检测地面引导线的循迹模块。
2.根据权利要求1所述的盆栽转移机器人控制系统,其特征在于:所述主控模块内设有机器视觉模块。
3.根据权利要求1所述的盆栽转移机器人控制系统,其特征在于:所述循迹模块包括至少两个灰度传感器和光电开关。
4.根据权利要求1所述的盆栽转移机器人控制系统,其特征在于:所述弧形夹紧件的内侧安装有检测机械爪夹紧的压力传感器,所述压力传感器与主控模块连接。
5.根据权利要求1所述的盆栽转移机器人控制系统,其特征在于:所述底板上设有由多块挡板围成的多个置物区。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921850640.6U CN210790955U (zh) | 2019-10-29 | 2019-10-29 | 一种盆栽转移机器人控制系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921850640.6U CN210790955U (zh) | 2019-10-29 | 2019-10-29 | 一种盆栽转移机器人控制系统 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN210790955U true CN210790955U (zh) | 2020-06-19 |
Family
ID=71238910
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201921850640.6U Expired - Fee Related CN210790955U (zh) | 2019-10-29 | 2019-10-29 | 一种盆栽转移机器人控制系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN210790955U (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112871682A (zh) * | 2020-12-08 | 2021-06-01 | 梅卡曼德(上海)机器人科技有限公司 | 快递供包系统、方法、设备及存储介质 |
| CN113600499A (zh) * | 2021-07-14 | 2021-11-05 | 中北大学 | 罗汉果分拣机器人 |
| CN115946119A (zh) * | 2023-01-04 | 2023-04-11 | 北京化工大学 | 一种全方位自动巡径和多自由度抓放的智能输运机器人 |
| TWI832536B (zh) * | 2021-11-08 | 2024-02-11 | 美商尼奧西斯股份有限公司 | 機器人系統及操作與製造機器人系統相關方法 |
-
2019
- 2019-10-29 CN CN201921850640.6U patent/CN210790955U/zh not_active Expired - Fee Related
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112871682A (zh) * | 2020-12-08 | 2021-06-01 | 梅卡曼德(上海)机器人科技有限公司 | 快递供包系统、方法、设备及存储介质 |
| CN113600499A (zh) * | 2021-07-14 | 2021-11-05 | 中北大学 | 罗汉果分拣机器人 |
| TWI832536B (zh) * | 2021-11-08 | 2024-02-11 | 美商尼奧西斯股份有限公司 | 機器人系統及操作與製造機器人系統相關方法 |
| CN115946119A (zh) * | 2023-01-04 | 2023-04-11 | 北京化工大学 | 一种全方位自动巡径和多自由度抓放的智能输运机器人 |
| CN115946119B (zh) * | 2023-01-04 | 2024-06-25 | 北京化工大学 | 一种全方位自动巡径和多自由度抓放的智能输运机器人 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN210790955U (zh) | 一种盆栽转移机器人控制系统 | |
| EP3446951B1 (en) | Working device on inclined surface and cleaning method applied in solar power station | |
| CN203649649U (zh) | 一种自动焊接平台及系统 | |
| CN204019544U (zh) | 一种行走式机械抓取装置 | |
| CN101439465B (zh) | 缸体翻转机 | |
| CN108621119A (zh) | 一种旋转移位物料搬运机械臂及其工作方法 | |
| CN203045155U (zh) | 振动盘式激光焊接工装 | |
| CN110092163A (zh) | 一种基于寻边对中算法的自动感知搬运装置 | |
| CN105830755B (zh) | 高枝修剪机械动态配重装置及控制方法 | |
| CN102101292B (zh) | 四关节视觉机器人 | |
| CN206953017U (zh) | 全自动发传单机器人 | |
| CN112548982A (zh) | 一种自动搬运机器人装置及其驱动方法 | |
| CN210819533U (zh) | 一种盆栽转移机器人 | |
| CN210850260U (zh) | 一种搬运机器人机械手装置及搬运机器人 | |
| CN104889997A (zh) | 一种固态酿造翻曲高精度定位的机械手控制系统及方法 | |
| CN207480599U (zh) | 一种基于机器视觉的工业机器人运动控制装置 | |
| CN107962054B (zh) | 应用于光伏阵列的可换板作业清洗机器人的换板方法 | |
| CN205694490U (zh) | 一种高枝修剪机械动态配重装置 | |
| CN110178536B (zh) | 番茄采摘机器人及其控制方法 | |
| CN209793724U (zh) | 混联式可移动自平衡重载铸造机器人 | |
| CN110539294A (zh) | 搬运机器人机械手装置及搬运机器人 | |
| CN102962662A (zh) | 尾套和止动环自动装配机 | |
| CN212071945U (zh) | 汽车生产线用蓄电池取放装置 | |
| CN110131571B (zh) | 一种适于加气场所的自动加气机器人 | |
| CN210890769U (zh) | 一种多窗口机器人视觉定位装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20200619 Termination date: 20201029 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |