CN203317424U - Mechanical arm - Google Patents
Mechanical arm Download PDFInfo
- Publication number
- CN203317424U CN203317424U CN2013204281166U CN201320428116U CN203317424U CN 203317424 U CN203317424 U CN 203317424U CN 2013204281166 U CN2013204281166 U CN 2013204281166U CN 201320428116 U CN201320428116 U CN 201320428116U CN 203317424 U CN203317424 U CN 203317424U
- Authority
- CN
- China
- Prior art keywords
- large arm
- arm
- forearm
- servomotor
- drive motors
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Landscapes
- Manipulator (AREA)
Abstract
The utility model relates to a mechanical arm which comprises a base, a turntable, a big arm servo motor and a big arm motor support, wherein the turntable is located on the base and is connected with the base in a rotatable mode, and the big arm motor support is fixedly connected to the turntable and is used for supporting the big arm servo motor. The mechanical arm further comprises a big arm rotating shaft support and a small arm drive motor support, wherein the big arm rotating shaft support is arranged opposite to the big arm servo motor, and the small arm drive motor support is used for supporting a small arm drive motor. The bottom of the big arm rotating shaft support is fixedly connected with the turntable, the rotating shaft of the big arm servo motor is connected with the top portion of the big arm rotating shaft support and the bottom portion of the small arm drive motor support in sequence, and the top portion of the small arm drive motor support is further fixedly connected with a big arm. The mechanical arm further comprises a transmission structure which transmits the driving force of the small arm drive motor to a small arm and drives the small arm to rotate. The mechanical arm shortens the resisting arm of the small arm drive motor, and greatly reduces the idle work consumption of the big arm servo motor; in addition, the gravity center of the mechanical arm is lowered, and the mechanical arm is made to be more stable.
Description
Technical field
The utility model relates to the apparatus for casting technical field, is specifically related to a kind of mechanical arm.
Background technology
Mechanical arm generally has the handle sturcture of controlling object and makes the arm mechanism of handle sturcture action.Mechanical arm
Can be divided into the mechanical arm of automatic control and the mechanical arm of people's operation.
Existing mechanical arm generally includes base, be positioned on base and the rotating disk be rotatably connected with base and the rotating disk servomotor horizontally rotated for driving rotating disk; Also comprise the large arm be fixedly connected on rotating disk and the large arm servomotor rotated for driving large arm; Also comprise the forearm be flexibly connected with large arm top and the forearm drive motors rotated for driving forearm.The shortcoming of prior art just is; forearm drive motors and forearm are co-located on large arm top; this makes the center of gravity of mechanical arm higher on the one hand; less stable; on the other hand; the resistance arm of forearm drive motors is longer, when large arm servomotor drives the rotation of forearm drive motors forearm, need to do more merit.
Summary of the invention
The problems referred to above that exist for prior art, problem to be solved in the utility model is: how a kind of mechanical arm is provided,
Lower as much as possible the load of large arm servomotor, increase work efficiency.
For achieving the above object, technical solution adopted in the utility model is: a kind of mechanical arm, the rotating disk that comprises base, is positioned on base and is rotatably connected with base, the rotating disk servomotor is arranged on base, driving rotating disk circumferentially rotates, be fixed on large arm and large arm servomotor on rotating disk, large arm servomotor is supported by the large arm electric machine support be fixedly connected on rotating disk, and large arm servomotor drives large arm and produces the pitching action; It is characterized in that: also comprise the large arm shaft seating that is oppositely arranged with large arm servomotor and for supporting the forearm drive motors support of forearm drive motors, the bottom of described large arm shaft seating is fixedly connected with rotating disk, the rotating shaft of large arm servomotor is rotationally connected with the top of large arm shaft seating and the bottom of forearm drive motors support successively, and the top of forearm drive motors support also is fixedly connected with large arm; Forearm is arranged on the top of large arm turnably, and an end of forearm is connected with the forearm drive motors by forearm drive link, forearm drive rod, and the forearm drive motors drives forearm, and around it, the tie point with large arm rotates.
As optimization, the rotating shaft of described large arm servomotor is connected with the top of large arm shaft seating by clutch shaft bearing, and is connected with the bottom of forearm drive motors support by the second bearing.
With respect to prior art, the utlity model has following advantage: the forearm drive motors in the utility model has been arranged on the bottom of large arm by forearm drive motors support, thereby when large arm servomotor drives large arm rotation; the resistance arm of forearm drive motors is shorter; therefore; large arm servomotor has reduced its work, thereby reduced the idle work loss of large arm servomotor; In addition, the forearm drive motors is arranged on the bottom of large arm or the center of gravity of mechanical arm has reduced, thereby makes this mechanical arm more stable.
The accompanying drawing explanation
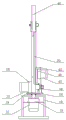
The Facad structure figure that Fig. 1 is the large arm of embodiment 1 and forearm mechanical arm when vertical.
The construction profile that Fig. 2 is mechanical arm when in embodiment 1, large arm and forearm bend down certain angle.
In figure, base 10, rotating disk 20, rotating disk servomotor 22, rotating disk servomotor decelerator 24, large arm 30, large arm servomotor 32, large arm electric machine support 34, large arm shaft seating 36, large arm servomotor decelerator 38, forearm 40, forearm drive motors 42; forearm drive motors support 44; forearm drive rod 46, forearm drive link 47, forearm drive motors decelerator 48.
The specific embodiment
Below in conjunction with drawings and Examples, the utility model is described in further detail.
Embodiment:Referring to Fig. 1, a kind of mechanical arm, comprise base 10, be positioned on base and the rotating disk 20 be rotatably connected with base 10, large arm servomotor 32, with rotating disk 20, be fixedly connected with for supporting the large arm electric machine support 34 of large arm servomotor 32, rotating disk servomotor 22 is arranged on base 10, its output shaft can be connected with rotating disk servomotor reducer input shaft by a shaft coupling, the output shaft of rotating disk servomotor decelerator 24 is connected with rotating disk 20 by rotating disk 20 plane bearings, thereby drive rotating disk 20, on base 10, around its axis, circumferentially rotates;
Also comprise the large arm 30 and the large arm servomotor 32 that are fixed on rotating disk 20, large arm servomotor 32 is supported by the large arm electric machine support 34 be fixedly connected on rotating disk 20, can also comprise a large arm servomotor decelerator 38 and be fixedly connected on rotating disk 20 for supporting the large arm servomotor reducer stent of large arm servomotor 32, the output shaft of large arm servomotor 32 also can be connected with large arm servomotor decelerator 38 power shafts by a shaft coupling, large arm servomotor decelerator 38 output shafts are connected with large arm 30, drive large arm 30 pitching;
Also comprise forearm drive motors 42 and be arranged on turnably the forearm 40 on large arm 30 tops, also comprise the large arm shaft seating 36 that is oppositely arranged with large arm servomotor 32 and for supporting the forearm drive motors support 44 of forearm drive motors 42, the bottom of large arm shaft seating 36 is fixedly connected with rotating disk 20, the rotating shaft of large arm servomotor 32 is rotationally connected with the top of large arm shaft seating 36 and the bottom of forearm drive motors support 44 successively, the rotating shaft of large arm servomotor 32 is longer, during concrete enforcement, the rotating shaft of large arm servomotor 32 can form by two sections, wherein do elevating movement for driving large arm for one section, another section successively with the bottom of the top of large arm shaft seating 36 and forearm drive motors support 44 through being dallied, large arm shaft seating 36 and forearm drive motors support 44 are played to certain supporting role, the rotating shaft of large arm servomotor 32 preferably is connected with the top of large arm shaft seating 36 by clutch shaft bearing, and preferably by the second bearing, with the bottom of forearm drive motors support 44, be connected, clutch shaft bearing and the second bearing also can play certain supporting role like this, the top of forearm drive motors support 44 also is fixedly connected with large arm 30, also comprise forearm drive rod 46 and forearm drive link 47, power one end of forearm drive rod 46, be that power intake is connected with the output shaft rotation of forearm drive motors 42, other end of forearm drive rod 46, be an end active link of clutch end and forearm drive link 47, the other end of forearm drive link 47 is fixedly connected with forearm.Can also comprise forearm drive motors decelerator 48, this forearm drive motors decelerator 48 is supported by forearm drive motors support 44; output shaft of forearm drive motors 42 is connected with the power shaft of forearm drive motors decelerator 48, and the output shaft of forearm drive motors decelerator 48 and drive mechanism drive in succession forearm and rotate.When comprising forearm drive motors decelerator 48, an end of forearm drive rod 46 is connected with the output shaft of forearm drive motors decelerator 48.
The course of work:
22 work of rotating disk servomotor, can drive rotating disk 20 around the 360 ° of rotations in the horizontal direction of the plane bearing of fixing it by rotating disk servomotor decelerator 24, the large arm 30 be fixed on rotating disk rotates with rotating disk with large arm servomotor 32, be connected to large arm top forearm 40, with the forearm drive motors support 44 be fixedly connected with on large arm, together with rotating disk, rotate; forearm drive motors 42 relies on forearm drive motors supports 44 as supporting, thus with 44 rotations of forearm drive motors support; Large arm servomotor 32 work, by the power of large arm servomotor 32, the power shaft by connected large arm servomotor decelerator 38 imports into its output shaft, output shaft through large arm servomotor decelerator 38 is passed to large arm again, thereby drive large arm 30 in the vertical directions, does elevating movement; 42 work of forearm drive motors, by the power of forearm drive motors 42, the power shaft by connected forearm drive motors decelerator 48 imports into its output shaft, output shaft through forearm drive motors decelerator 48 drives 46 rotations of forearm drive rod again; forearm drive rod 46 is driving 47 rotations of forearm drive link, when
When forearm drive rod 46 rotates to the least significant end of its vertical direction; forearm drive rod 46 drives with forearm drive link 47 and rotates; now forearm drive link 47 pulls an end of forearm downwards, the other end of forearm be take the junction of forearm and large arm and is moved upward as fulcrum; On the contrary, when forearm drive rod 46 rotates to the most significant end of its vertical direction, forearm drive rod 46 drives with forearm drive link 47 and upwards rotates, and now; forearm drive link 47 upwards promotes an end of forearm, the other end of forearm be take the junction of forearm and large arm and moved downward as fulcrum.Thereby realized that large arm and forearm complete the multipoint freely-movable in space, rotating disk servomotor 22, large arm servomotor 32 and forearm drive motors 42 can work independently.
Finally explanation is, above embodiment is only unrestricted in order to the technical solution of the utility model to be described, although with reference to preferred embodiment, the utility model is had been described in detail, those of ordinary skill in the art is to be understood that, can modify or be equal to replacement the technical solution of the utility model, and not breaking away from aim and the scope of technical solutions of the utility model, it all should be encompassed in the middle of claim scope of the present utility model.
Claims (2)
1. a mechanical arm, comprise base (10), be positioned at the rotating disk (20) that base (10) is upper and be rotatably connected with base (10), rotating disk servomotor (22) is arranged on base (10), driving rotating disk (20) circumferentially rotates, be fixed on large arm (30) and large arm servomotor (32) on rotating disk (20), large arm servomotor (32) is supported by the large arm electric machine support (34) be fixedly connected on rotating disk (20), and large arm servomotor (32) drives large arm (30) and produces the pitching action; It is characterized in that: also comprise the large arm shaft seating (36) that is oppositely arranged with large arm servomotor (32) and for supporting the forearm drive motors support (44) of forearm drive motors (42), the bottom of described large arm shaft seating (36) is fixedly connected with rotating disk (20), the rotating shaft of large arm servomotor (32) is rotationally connected with the top of large arm shaft seating (36) and the bottom of forearm drive motors support (44) successively, and the top of forearm drive motors support (44) also is fixedly connected with large arm; Forearm (40) is arranged on the top of large arm (30) turnably; an end of forearm (40) is connected with forearm drive motors (42) by forearm drive link (47), forearm drive rod (46), and forearm drive motors (42) drives forearm (40), and around it, the tie point with large arm (30) rotates.
2. mechanical arm as claimed in claim 1, it is characterized in that: the rotating shaft of described large arm servomotor (32) is connected with the top of large arm shaft seating (36) by clutch shaft bearing, and is connected with the bottom of forearm drive motors support (44) by the second bearing.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2013204281166U CN203317424U (en) | 2013-07-18 | 2013-07-18 | Mechanical arm |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2013204281166U CN203317424U (en) | 2013-07-18 | 2013-07-18 | Mechanical arm |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN203317424U true CN203317424U (en) | 2013-12-04 |
Family
ID=49656817
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2013204281166U Expired - Fee Related CN203317424U (en) | 2013-07-18 | 2013-07-18 | Mechanical arm |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN203317424U (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103802111A (en) * | 2013-12-23 | 2014-05-21 | 北京晨鑫意科技有限公司 | Chess playing robot |
| CN103978483A (en) * | 2014-05-05 | 2014-08-13 | 重庆优楷科技有限公司 | Industrial joint robot body |
| CN103978475A (en) * | 2014-05-05 | 2014-08-13 | 重庆优楷科技有限公司 | Industrial intelligent robot body |
| CN103978480A (en) * | 2014-05-05 | 2014-08-13 | 重庆优楷科技有限公司 | Industrial table type mechanical arm |
| CN106767599A (en) * | 2016-12-26 | 2017-05-31 | 沈阳航空航天大学 | A kind of Three-coordinate measurer and method |
-
2013
- 2013-07-18 CN CN2013204281166U patent/CN203317424U/en not_active Expired - Fee Related
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103802111A (en) * | 2013-12-23 | 2014-05-21 | 北京晨鑫意科技有限公司 | Chess playing robot |
| CN103978483A (en) * | 2014-05-05 | 2014-08-13 | 重庆优楷科技有限公司 | Industrial joint robot body |
| CN103978475A (en) * | 2014-05-05 | 2014-08-13 | 重庆优楷科技有限公司 | Industrial intelligent robot body |
| CN103978480A (en) * | 2014-05-05 | 2014-08-13 | 重庆优楷科技有限公司 | Industrial table type mechanical arm |
| CN103978480B (en) * | 2014-05-05 | 2016-08-24 | 重庆优楷科技有限公司 | Industrial desktop computer mechanical arm |
| CN106767599A (en) * | 2016-12-26 | 2017-05-31 | 沈阳航空航天大学 | A kind of Three-coordinate measurer and method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN203317424U (en) | Mechanical arm | |
| CN203128060U (en) | Simple crane | |
| CN203792330U (en) | Self-adaption mechanical arm | |
| CN102697309A (en) | Crank linkage mechanism electric dynamic seat with speed-reducing function | |
| CN201625399U (en) | Ball feeding device of table tennis serving machine | |
| CN204117481U (en) | A kind of Multi-freedom-degreemanipulator manipulator teaching aid | |
| CN205106966U (en) | 4D seat supporting platform | |
| CN202137763U (en) | Rotary swinging robotic arm | |
| CN208767751U (en) | A kind of power transmission device in adjustable support direction and angle | |
| CN206484551U (en) | A kind of industrial robot system controlled based on PLC | |
| CN208231829U (en) | A kind of Industrial Robot Manipulator arm | |
| CN203326085U (en) | Electric antenna lifting device | |
| CN206032721U (en) | Automatic ma pi robot of top mounted diaxon | |
| CN203187324U (en) | Building tower crane driven to rotate by wind power | |
| CN202334197U (en) | Drive device for driving crochet needle of cable tie machine to move vertically | |
| CN107791468A (en) | One kind injection taking mechanical hand | |
| CN204844157U (en) | Mechanical arm | |
| CN204604317U (en) | A kind of manipulator for robot of casing | |
| CN201841486U (en) | Pipe support mechanism | |
| CN204431751U (en) | Blower fan fiberglass blade die turnover apparatus | |
| CN207128779U (en) | A kind of motor vehicles camera cradle head lifts swing arm transmission mechanism | |
| CN208394301U (en) | A kind of feeding device based on artificial intelligence | |
| CN201938751U (en) | Multifunctional regulating electric tea table | |
| CN101593580A (en) | A kind of device for intertwining, fixing and tensioning power cable | |
| CN104157205A (en) | Multi-freedom manipulator teaching aid |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20131204 Termination date: 20140718 |
|
| EXPY | Termination of patent right or utility model |