CN1270226C - 力传感器和使用力传感器的触摸面板 - Google Patents
力传感器和使用力传感器的触摸面板 Download PDFInfo
- Publication number
- CN1270226C CN1270226C CNB028081218A CN02808121A CN1270226C CN 1270226 C CN1270226 C CN 1270226C CN B028081218 A CNB028081218 A CN B028081218A CN 02808121 A CN02808121 A CN 02808121A CN 1270226 C CN1270226 C CN 1270226C
- Authority
- CN
- China
- Prior art keywords
- power
- touch
- sensor
- touch member
- force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0414—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means using force sensing means to determine a position
- G06F3/04142—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means using force sensing means to determine a position the force sensing means being located peripherally, e.g. disposed at the corners or at the side of a touch sensing plate
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K11/00—Methods or arrangements for graph-reading or for converting the pattern of mechanical parameters, e.g. force or presence, into electrical signal
- G06K11/06—Devices for converting the position of a manually-operated writing or tracing member into an electrical signal
Abstract
触摸屏使用一个或多个力传感器(220)来测定屏幕上触摸的位置。力传感器(220)具有精确测定的灵敏度方向,并且因此就降低了与屏幕不垂直力的灵敏度。传感器(220)与活动力检测元件(active force-sensing element)区域相比是较薄的,这就允许低轮廓力触摸屏(low profile force touchscreens)与迄今为止获取的相比而言,具有更好的机械完整性(mechanicalintegrity)、准确度、灵敏度和高的信噪比组合。传感器(220)也可为旋转柔软的(rotationally soft),这样以使有效的阻止覆盖(overlay)(210)或支持表面(support surface)的扭转运动影响敏感力。
Description
发明领域
本发明涉及力传感器,尤其涉及可用来测定施加到触敏显示器(touchsensitive display)的触摸屏上的力的力传感器。
背景
触摸屏提供到计算机或其它数据处理装置的简单和直观的接口。用户并非使用键盘用于数据输入,他们可使用触摸屏,通过触摸图标或在屏幕上书写或绘画来传递信息。触摸屏用于多种信息处理应用实例中。在诸如液晶显示器(LCD)或阴极射线管(CRT)这样的信息显示器上使用的透明触摸屏对诸如蜂窝式便携无线电话、个人数字助理(PDAs)和手持或膝上电脑这样的应用实例来说尤其有用。
我们已经使用了不同的方法来测定触摸位置,这包括电容性的、电阻性的(resistive)、声音和红外线技术。我们也可使用与触摸表面结合的力传感器,通过检测触摸屏上的触摸力来测定触摸位置。用检测触摸力来工作的触摸屏有数个胜过其它上述技术的优点。诸如电阻性和电容性方法这样的基于电的方法需要使用专门材料和多层的复杂触摸表面覆盖,以确保整个屏幕上良好的电属性,而同时也保持整个屏幕上良好的光传输。另一方面,可用简单的、单片材料来形成基于力的触摸屏的覆盖。进一步,力传感器不依靠如电容性触摸屏所需要的有损耗的与地的电连接,并且我们可通过手指触摸、戴手套的手、手指甲或其它非导电触摸器具来操作它。不同于声表面波技术,力传感器相对地不受触摸屏上的污垢、灰尘或液体的积聚的影响。最终,力传感器相对不太可能将无意间的接近触摸(close encounter)检测为实际的触摸,而这可能是红外线或电容性触摸屏的一个问题。
由触摸屏力传感器检测到的力反映了除触摸力之外的多种静态和动态因素。可以认为这些因素为相对于触摸信号的噪声源。可能会通过触摸屏电子线路(touch screen electronics)引入噪声,或者其性质可能为机械的。例如,在传感器、放大器、数据转换或信号处理阶段中可能会引入电噪声。机械噪声可能产生于诸如振动、挠曲、运动和与触摸屏不垂直力的应用实例这样的不同机械效果。另外,触摸屏力传感器可能受到触摸表面的重量和在制造阶段施加到力传感器的预加载力重量的影响。
发明的主要内容
通常而言,本发明涉及一种类型的力传感器,它具有更加精确测定的灵敏度方向,并且因此而减少了与触摸屏不垂直的力的灵敏度。进一步,传感器与活动力检测元件区域相比是较薄的,这就允许小轮廓力触摸屏与迄今为止获取的相比,具有机械完整性、准确度、灵敏度和高的信噪比的更好的组合。传感器也可为旋转柔软的,这意味着它有效地阻止覆盖或支持表面的扭转运动影响所检测的力。
在一个特定实施例中,本发明针对用于测定施加到触摸屏上的力的位置的装置。该装置包括触摸构件(touch member)、基座支持(base support)和在触摸构件和基座支持之间起联结作用的联结单元。该联结单元包括在外围部分与各个梁构件支持相连的梁构件。梁构件的中心部分相对于外围部分来说实质上没有得到支持。力路径(force path)在触摸构件和基座支持之间传递力。力路径在梁构件的中心部分和梁构件的外围部分之间传递。至少有一个传感器元件检测可表示由触摸力引起的梁构件位置处力的信号。
本发明的又一个实施例针对检测具有触摸构件的触摸屏上的触摸位置的方法。该方法包括将施加到触摸构件第一面(first side)上的至少一部分力传递到下列部件上中之一:i)布置在触摸构件的第二面上的力传播器(forcespreader)的中心部分,该力传播器的中心部分实质上没有得到支持,以及ii)力传播器的外围部分。该方法也包括将部分施加力从i)力传播器的中心部分和ii)力传播器的外围部分中的一个传送到i)力传播器的中心部分和ii)力传播器的外围部分中的另外一个。检测表示被传递到力传播器的部分施加力的信号。
本发明的又一个实施例针对用于检测被施加到触摸构件的第一面上的力位置的系统。该系统包括这样的装置,用于将至少一部分被施加到触摸构件第一面上的力传递到力传播装置的中心部分,用于传播部分布置在触摸构件第二面上的施加力。该力传播装置的中心部分实质上没有得到支持。力传播装置在力传播装置的中心部分和外围部分之间传递部分施加力。还有一个装置,用于测量表示被传递到力传播装置的部分施加力的信号。
本发明的又一个实施例针对用于检测触摸面板上触摸位置的触摸面板系统。该系统包括基座支持和通过联结单元与基座支持联结的触摸构件。联结单元中的至少一个包括在外围部分与各个梁构件支持联结的梁构件。梁构件的中心部分相对于外围部分而言实质上没有得到支持。力路径在触摸构件和梁支持之间传递力。力路径在梁构件的中心部分和梁构件的外围部分之间传递。布置至少一个传感器元件来测量表示通过由触摸引起的梁构件位置传递的力的信号。触摸面板控制器与来自许多力传感器单元的接收检测信号相连,以测定触摸面板上的触摸位置。
本发明的又一个实施例针对用于对触摸屏上触摸的位置进行定位的装置。该装置包括触摸构件、接收结构和力传播构件。力传播构件具有联结的集中力接收区域,以接收从触摸构件传递到力传播构件中的力。力传播构件也具有力分布区域,以将力传播构件之外的力传递到接收结构中。该分布区域具有比力接收区域更大的面积。布置接收结构和力传播构件,以使由力的力保持加载(force maintain loading)引起的力传播构件曲率的变化通过力传播器传送,而同时力保持在测量范围内,以便将传播构件中的力充分地传送到所有分布区域中。我们布置检测元件以检测通过力传播构件传递的力。
本发明的又一个实施例针对用于对触摸屏上的触摸进行定位的系统。该系统包括触摸构件、基座支持和联结在触摸构件和基座支持的联结区域之间的联结组合装置。该联结组合装置相对于触摸构件和基座支持中的一个而言是旋转未受限制的(rotationally unconstrained)。联机组合装置包括具有主平面(predominant plane)的梁构件。该梁构件具有联结来接收来自触摸构件的力的第一区域。梁构件也包括至少一个第二区域。梁构件接收与主平面垂直的方向上的力,并将该力横向(laterally)传递到至少一个第二区域中。该力通过至少一个第二区域在梁构件之外向联结组合装置的梁构件支持传递。传感器元件对与主平面垂直的力作出响应。
本发明的上述摘要并非要说明每个例证性的实施例或每个本发明的实现。后面的附图和详细说明更加具体的举例说明了这些实施例。
附图概述
由于下面本发明不同实施例的详细说明,并结合附图,我们可以更完整地了解本发明,其中:
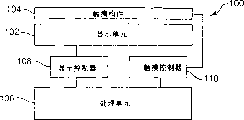
图1示出了根据本发明的实施例的显示装置的方框图;
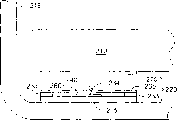
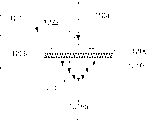
图2示意性地阐明了根据本发明的实施例通过基于力的触摸传感器的局部横截面;
图3A示意性地阐明了当把传感器刚性地连在覆盖和框架(frame)上时施加到力传感器的力;
图3B示意性地阐明了根据本发明的实施例当将力施加到柔软的覆盖上时旋转软化的效果;
图4A和4B示意性地阐明了当在与触摸表面垂直的方向上施加力时由使用常规力传播器而引起的力分布;
图5A和5B示意性地阐明了当在与触摸表面不垂直的方向上施加力时由使用常规力传播器而引起的力分布;
图6示意性地阐明了根据本发明的实施例的外围加载力传感器;
图7示意性地阐明了根据本发明的又一个实施例的梁加载力传感器;
图8A和8B示意性地阐明了根据本发明的电容类型的梁加载力传感器的实施例;
图9A和9B示意性地阐明了根据本发明的电容类型的梁加载力传感器的又一个实施例;
图10示意性地阐明了根据本发明的电容类型的梁加载力传感器的又一个实施例;
图11A-11C示意性地阐明了根据本发明的电容类型的梁加载力传感器的又一个实施例;
图12A和12B示意性地阐明了在沿着不同角度施加力的情况下,薄的力传感器的负载分布;以及
图13示意性地阐明了力传感器的又一个实施例。
虽然本发明应服从不同的更改和选择形式,但是我们已经由附图中的例子示出了其细节并且我们将会详细说明该细节。然而,应当认识到我们的目的并不是限制本发明于所述特定的实施例中。相反,我们的意图是在由所附的权利要求书定义的本发明主旨和范围之中,包括所有的更改、等价物和可供选择的事物(alternatives)。
详细说明
本发明可应用于触摸敏感技术,并且我们相信其对产生对可能导致触摸位置的误读取的正切力(tangential force)不太敏感的力传感器尤其有用。此外,我们相信本发明会产生与力检测元件的活动区域相比为较薄的力传感器,这有助于进行精确的、小轮廓触摸敏感装置的构造。
使用本发明力传感器的触摸屏可在桌面、手持或膝上计算机系统、销售点终端、个人数字助理(PDA)或蜂窝式便携无线电话中使用。尽管我们结合基于微处理器的系统做了说明,但是如果需要的话,本发明的触摸屏装置可以与任何基于逻辑的系统组合。在测定触摸屏上的触摸位置中,由一个或多个位置最接近触摸屏触摸表面的力传感器产生代表作用在触摸屏上触摸力的触摸信号。在触摸屏的形状是矩形的时,通常把力传感器布置在触摸屏四个角中的每一个角上。可从单个传感器,或者从两个或更多的力传感器中组合分触摸信号(component touch signals)来得到触摸信号。触摸位置的测定需要分析由不同力传感器产生的分力信号。
图1阐明了包括触摸显示器的某些基本组件的装置100。把例如液晶显示器(LCD)或阴极射线管(CRT)等的显示单元102,布置在触摸构件104之下。显示单元102与处理单元106联结并显示通过显示控制器108从处理单元106接收的信息。显示控制器108可为处理单元106的一部分。由可为处理单元106一部分的触摸屏控制器110测定触摸构件104上的触摸位置。触摸屏控制器110接收与由不同力传感器检测的分力有关的信号。然后,我们分析这些信号,以测定相对于不同力传感器位置的触摸位置。因此,处理单元106能够测定相对于显示在显示单元102上图像的触摸构件104的触摸位置,并确定用户输入的意义(meaning)。重要的是,需要测定触摸构件104上的触摸位置时几乎没有误差,以确保处理单元106从用户处接收所需要的信息。
力传感器通常检测响应于施加力而出现的某些运动。例如,应变仪元件在施加力的作用下伸展,而且当压缩或伸展传感器元件时,压电或压阻传感器的电特性改变了。此外,在电容性传感器元件中,在施加力时一个电容器板(capacitor plate)相对于另一个电容器板而移动。因此,虽然可以把传感器称为位移传感器,但是应当理解,即使位移本身的量是微乎其微的,位移的测量也可用来提供引起所测量的位移的施加力的估计。
在2001年4月13日提出的,标题为”Method and Apparatus forForce-based Touch Input,”的美国专利申请09/835,040中说明了适合使用在触摸屏应用实例中的力传感器的一个特定实施例,作为参考结合于此。力传感器适合用在液晶显示器(LCD)、阴极射线管(CRT)或其它透明显示器中,并且我们在图2中示意性地做了阐明。在这个特定实施例中,传感器根据电容性元件电容的改变而测量施加力。
使触摸面板或覆盖210定位在框架或机架(housing)215中。这可能会提供有大的中心孔径(未示出),通过它我们可观看到显示器。进一步,覆盖210可为透明的,以允许进行这样的观看。若需要,机架215的底面可在围绕其活动区域的边界上,被直接安装到紧靠这样的显示器的表面。在另一个实施例中,如上所述,包括诸如LCD这样显示单元的结构可取代覆盖。电容性传感器220可定位在覆盖210和机架215之间。
可通过焊接、粘结或其它已知方法使具有附加台阶(attachmentlands)233的互联225与机架215联结。传导区域在互联225上形成了第一传导元件234。具有中心微坑的第二传导元件235可通过例如焊接连接在互联225的台阶233上。由第二传导元件235的形状或者通过将第二传导元件235连接在互联225上的过程,在第一传导元件234和第二传导元件235之间形成了小间隙280。例如,间隙280的宽度近似为0.025mm。通过由间隙280分隔开的传导元件234、235形成了电容器。
我们可将轴承面(bearing surface)270插入(interposed)到触摸面板210和第二传导元件235之间。这会保护覆盖210,防止其被微坑240印压或损伤,特别在由软材料(softer material)制成覆盖210的情况中。轴承面270也可通过弹性体或高柔韧性胶粘剂的薄层(未示出)安装到覆盖210上,因此这就提供了横向软化功能。在正常的操作中,覆盖210或轴承面270与微坑240接触:所示出的这些元件是分隔开的,仅为了在附图中清楚地说明。
第二传导元件235将弹簧和电容器板的功能组合。当把垂直力施加到触摸面板210的表面上时,第二传导元件235就弯曲了,这就减少了间隙280的宽度而增加了传感器220的电容。我们可测量这个电容的改变并且该电容变化与施加到触摸面板210上的力有关。尽管说明了使用电容性力传感器的触摸屏,能以类似方式使用其它类型的力传感器,例如,压电传感器和应变仪传感器。
基于力的触摸屏的优点中之一是安置在显示单元和用户之间的光学相异层(optically distinct layers)的数量很少。通常,安置在显示单元上的覆盖为单层玻璃或较硬的聚合物,例如聚碳酸酯或类似的物质,可选择其具有最好的光学性质。这就与诸如电阻性或电容性触摸屏这样的其它类型的触摸屏形成对比,那些触摸屏通常需要在显示单元上的几层有潜在损耗的层(potentially lossy layers)。在电阻性或电容性触摸屏中需要的电传导薄膜通常具有高的折射率,这就导致了在接口处增加了反射损耗。由于传导层必须能够进行体接触,所以在有附加固体/空气接口且抗反射涂敷可能不太有用的电阻性屏幕中这一点尤其是个问题。然而,力屏幕覆盖仅有其上和下表面;我们可通过处理来减少反射损耗并降低眩光。例如,可使覆盖配备有不光滑的表面来减少镜面反射,或可配备有抗反射涂敷来减少反射损耗。
并不是覆盖显示器,覆盖210本身可包括图像产生屏幕,例如液晶显示器。这样的显示器包含一起形成覆盖210的许多层。在这样的情况下,用户触压在屏幕本身上,并且在不同力传感器处检测到施加的合成分力(resultingcomponent forces),并求解来测定屏幕上触摸的位置。
术语“旋转软化”使传感器的不灵敏度(insensitivity)与覆盖或支持的扭转运动相关联。当覆盖和下面的支持中至少一个是易弯曲的时,旋转软化是力传感器具有的尤其重要的特性。另一方面,当覆盖和下面的支持都非常坚硬时,旋转软化就不那么重要了。然而,刚性是通过使用大量的材料而产生的,所以坚硬结构既大又重。然而,我们更希望触摸显示器轻巧紧凑,所以重要的是能够解决由增加触摸屏结构的柔性带来的影响。因此,包括旋转软化的力传感器的使用允许触摸显示器更薄更轻。术语“旋转未受限制的”可用来指出基座支持和覆盖能够至少在角度的操作范围(operational range of angles)内相对于彼此而旋转。
参考图3A和3B,我们进一步说明了显示器的可挠性以及旋转软化以减少在触摸位置测定中可能的负面效应的重要性,讨论了把由扭转运动引起的力施加到力传感器。
在图3A的示意性例证中,覆盖304被支持在两个传感器组合装置302和303之间。覆盖304的柔韧性表现在其并非完全坚硬,并且可响应于施加力,尤其是在离开支持点(point distance)处施加的力,而弯曲。传感器组合装置302和303是坚硬的:例如,传感器组合装置例如可使用压电元件来形成。传感器组合装置302和303将力和力矩均传输到支持310。操作员(operator)用力Ftotal压在覆盖304上。力F1通过第一传感器组合装置302传递到支持310,而力F2通过第二传感器组合装置303传递到支持310。在平衡时,Ftotal=F1+F2。反作用力F1′(=-F1)和F2′(=-F2)产生了关于P点施加于力的力矩。由于传感器的旋转刚度,力矩m1可通过第一传感器302传递,且力矩m2可通过第二传感器303传递。
在平衡时,力矩和力符合下面的条件:
F1x1-m1=F2x2-m2 (1)
这里x1是从第一传感器302到P点的距离,且距离x2是从第二传感器303到P点的距离。
应当注意的是尽管其它的符号规约是可行的,但是在这里列出的等式中,变量是用它们的正量值来表示的。
尽管直截了当的力敏感触摸位置装置没有产生直接代表m1或m2的信号,但是这些力矩确实影响了由传感器302和303产生的力信号。可以实施尝试估计或纠正这些力矩的间接方法。这样的方法是复杂的,并且很难实现。然而,若不实施这样的方法,则位置计算会产生严重的误差。
图3B中示意性地阐明了另一个包括旋转软化的测量触摸位置的方法。在该方法中,易弯曲的覆盖304被支持在两个传感器312和313之间。该传感器可为任何类型的检测施加力的传感器,例如,压电传感器、电容性位移传感器、压阻传感器、应变仪传感器或类似的传感器。在覆盖和每个传感器312和313之间有可自由旋转的轴承(bearing)。例如,在支持310和传感器312和313之间还可以有横向软化器(lateral softener)316。横向软化器316可由允许易于横向弹性运动的材料形成,这样,使正切力没有通过传感器312和313传输到支持310。美国专利申请第09/835,049号中对横向软化器做了进一步说明,作为参考合并于此。
由用户在覆盖304的P点处施加的力Ftotal导致力F1和F2分别通过传感器312和313施加到支持310。反作用力F1′=-F1和F2′=-F2产生关于P点的力矩。由于旋转软化传感器组合装置312和313没有直接传递力矩,所以由F1′和F2′产生的关于P的力矩必须是关于P的总力矩(total moment),在平衡时,其为零值。这样,我们可写出下面的等式:
F1x1=F2x2 (2)
因此,通过计算测量力组合的合适比率来发现触摸的位置是可能的。然而,具有提供于覆盖或其它所支持的显示器或结构中的重要的柔性,该简单关系的适用性依靠旋转软化的使用。可通过使用枢轴、旋转轴承或类似的装置来实施旋转软化,以允许传感器的轴相对于覆盖和支持中的至少一个而旋转。在与本文同一天提出的,J.Roberts,的美国专利申请第TOUCH SCREEN WITHROTATIONALLY ISOLATED DISPLACEMENT SENSOR中对旋转软化进行了进一步的讨论,作为参考合并于此。
旋转软化可引起通过诸如轴承点这样的非常小的区域将力传递到力传感器。这样的力可能需要被再次传播,以通过力敏感材料或结构的较大区域来传递。该需要可能很困难与力敏感组合装置的其它期望属性相协调。
a)我们可能期待力敏感组合装置尽可能地薄。例如在小型手持装置中,厚度超过20mil的力敏感组合装置可对整个产品加上讨厌的厚度。
b)我们可能期待力敏感组合装置具有足够的区域以便容易制造和操作,并用来传递工作力而不产生过度的应力。例如,不同于厚度的较佳最小尺寸可为0.125”(3mm)的数量级(order);以及
c)我们可能期待力敏感组合装置只对传递过来的垂直分力做出响应,以维持精确的触摸位置。
通过电势力敏感区域传递的垂直力具有相关联的应力图案。在该图案不必要高度统一时,可能需使它电势力敏感区域中充分大的范围内分布以避免损伤、过载或不适当的灵敏度。虽然对应力来说,最好用施加的垂直分力来进行线性定标,重要的是它具有一对一的关系并且是可重复的。这一点是可以达到的,即使在整个传感器输出中对敏感区域的不同部分进行不均匀的加权会有作用。然而,有必要使所检测的应力图案不随正切分力而变化。这种变化可能需要来确切地取消。自敏感区域不同部分的反效果(opposing effects),与任何但是大多数的平均权重不兼容的一种要求。
图4A中示意性地阐明了一种类型的传感器组合装置400。在这个例子中,旋转软化是由与覆盖404接触的枢轴402引起的。力传播器406通过力传感器元件408将力从覆盖404传导到支持面。例如,传感器元件408可为压电传感器。以垂直方向沿着动作414的线施加的力412在传感器元件408中产生均匀的压缩应力分布416。从枢轴402到传感器元件408边缘408a的线与支持面形成角度θ。假设力传播器406是对称的,因此从枢轴402到传感器元件408另一个边缘408b的线也与支持面形成角度θ。更常见的是,可绘制出有效角θ,用来仅包围大多数力通过它而传递的电势力敏感区域。在本例中,实质上是从边缘408a或408b绘制的角度。
在图4B中阐明的力传感器组合装置420的实施例中,力传播器406与图4A中的力传播器相比,具有更薄的外形。该力传播器仍旧可产生对垂直施加力412的均匀力分布416,其中力传播器406由与力检测元件408相比,具有实质上更高模量的材料形成,并且若力检测元件408与其宽度相比较厚。在实际中,力传播器406或传感器408都必须是厚的,并且若力分布416近似于均匀的,则角度θ就因此而相当大了。由于这两者一起变薄了,所以力变得越来越向中心集中了,并可能仅通过一小部分的传感器区域来传递。
图5A示意性地阐明了施加力512离开垂直方向约30°,并且动作514的线通过力传感器元件408的边缘408a。在这样的情况下,若传感器元件408不附着在下面的支持面上,则传感器元件408的另一个边缘408b可使支持面顶离(lift off)。这可能导至力分布变成在位置408a位置处的冲量。
在把传感器元件408固定在支持面的地方,如所述,力传播器406的存在和所产生的变形的连续性(continuity of deformation)产生了力分布516。由于力并不是都与支持面垂直的,所以力分布516包括稳定的横向剪切分量。从图5B中阐明的力分布526中省略了该剪切分量,否则就与图5A示出的相同。我们也可假设传感器元件仅对垂直力做出响应,因此可以认为力分布没有剪切分量。根据力分布526,拉力526b平衡了关于力分量526a的边缘408a的力矩。因此,力分布526是非常不均匀的。
我们很难提供对在不可预测的正切力分量变化地产生这样的极端分布情况下的净力(net force)的精确响应。若要使用的传感器具有实用程度的响应统一性和/或完整电连接实用的统一性,则需要减少变化水平以获取给定的准确度水平。可减少图4和5中传感器的整个尺寸,以尝试获取足够低的高度。然而,这可能不实用,这是由于结果可能太小而不能制造或合适安装,以及太易碎而不能在操作条件下工作。这样的总的减小还使θ(因此是电势正切力灵敏度)未发生变化。
由于传感器负载分布中的变化强烈地取决于角度θ,所以可使用其它方法来减少角度θ。
薄的力传播器和薄的传感器元件的使用不能提供好的解决方法。该方法的问题是薄的力传播器不能将中心施加力在薄的敏感层上在横向上传送。为了做到这一点,薄的力传播器必须根据力具有力矩而弯曲,但是下面的材料无处可去的事实阻止了这样的挠曲。结果是使力分布集中了,并且没有在传感器元件的整个宽度上传播。尽管在变化施加力的角度的情况下,这个分布与从前相比,就绝对程度而言移动得更少了,但是它仍相对它自身的宽度移动了许多。这样,响应统一性的问题保留。
我们参考图12A和12B会更好的理解这个问题。在图12A中,力传感器1200具有力传播器1206和传感器元件1208。力1212a的施加产生压缩应力分布1216a。由于传播器1206和元件1208的薄的外形,应力分布1216a集中于中心。结果,有效角θ仍旧很大。
正切力在元件1208的中心之上施加与枢轴点1222的高度成比例的力矩,该力矩必须由垂直力的反向对(opposing pair)来平衡,所述垂直力趋向于在力分布到达的极限附近的横向距离处产生。这样,这些不均匀力与正切力的比值同枢轴点1222的高度与该横向距离的比值(即,θ的正切)成比例。
在图12B中确认了这里θ的高值表示具有变化分布的一个继续的问题。施加有角度力(An applied angled force)1212b产生力分布1216b。尽管这仅在绝对范围内适当地变化,但是与分布1216a揭示的点对点(point by point)相比较,已经确实出现了力的大的相对变化。
除了对正切力的连续高电势灵敏度之外,我们也可看到集中分布1216a和1216b没有有效地利用传感器元件1208,并可能使其局部过载。
简短地返回图4B,力检测元件408再次为低模量和低高宽比。但是对堆积在作为垫层(cushion)的低模量材料的较厚块上面或下面的薄的、高模量检测元件而言,这在功能上是相等的。将垫层置于力传播器和检测元件之间好像在传感器材料的不严格选择(relaxed choice)上几乎没有带来什么益处。然而,将检测元件置于力传播器和垫层之间可显著地减少θ的有效值。
在图13中,力敏感组合装置1300的实施例包括垫层1330。施加触摸力通过高柔韧性的、低模量层1332从触摸构件1304传递到枢轴元件1331中,例如,所述低模量层可包含压敏丙烯酸粘胶剂。然后触摸力顺次传递到传播器1306、力检测元件1308、低模量垫层1330和支持1310中。元件1308和垫层1330配备有孔或腔(cavity)1333,按需要提供传播器1306内的中心凹陷(central depression)的空隙。该凹陷允许枢轴1322落在检测元件1308的中间平面(neutral plane)1334中,由此θ的期望值接近零。高柔韧性低模量层1332使枢轴元件1331具有自中心功能(self centering function),帮助组合装置,并在影响支撑1310上的触摸构件1304位置的较小温度变化期间,允许保持对准。如在美国专利申请第09/835,049号中进一步说明层1332也可提供横向软化功能。通过使绝大多数的正切力沿着其它路径转移,这进一步减少了来自响应于正切触摸力的传感器的问题。
在力传感器1300的另一个变型中,可用类似传播器1206的传播器替换传播器1306。然后,可省略全部枢轴元件1331、层1332、腔1333和检测元件1308中的任何孔。应当理解,θ的结果值,尽管不再是标称的零值,但是仍旧很小。
在传感器1300中,我们可看到对于所有元件1308的力的有效分布有赖于垫层1330的存在;这样整个传感器组合装置仍旧相当厚。若把垫层做得太薄,或简单布置,则力可能结束而集中到就在检测元件1308中的孔周围的不可接受的小区域中。然而,若该孔同时被做得尽可能的大,则可保持足够的负载检测区域。
这样,根据本发明的方法通过在将力传递到任何下面的结构之前在薄的梁构件中横向传递力而同时解决了厚度过厚的问题和缺乏响应统一性的问题。在图6中示意性地阐明了这样的传感器单元的一个特定实施例。把该传感器单元布置在覆盖604和支持面610之间。沿着动作614的线把力612施加到覆盖604。
具有与覆盖604接触以提供横向软化的枢轴部分622的薄的力传播构件620将中心接收力传递到布置在力传播构件620的外围区域中的力传感器材料624中。若力传播构件620的形式是梁,则可使力敏感材料定位于梁的末端。若力传播构件620的形式为薄盘,则力敏感材料的形式可为环绕该盘外围或在该盘部分外围处的环面。在下面可把力传播构件620指为梁,但应当理解的是力传播构件也可具有其它的平面几何形状,例如其可为盘状,或可以形成如除去某些部分的盘的形状,诸如十字或其它形状。力传感器材料624可为压电材料、压阻材料或其它具有可测力响应特性的材料或装置。虽然如在传感器横截面中看到那样,传感器材料624的宽度并非非常大,但是材料624可在传播构件620的整个外围周围或大部分外围的周围延伸。这样,力可全部分布在敏感材料的适当的区域上。
力传感器材料624可与其电连接集成在一起作为单个传感器。例如,与图4和5中阐明的设计相比较,我们获得了对角度θ的非常小的有效值,这样,传感器负载几乎完全依靠垂直力,而并非正切力。注意,依靠传感器材料624的厚度和刚度以及它附加在上面和下面的模式,在传感器材料624中的力分布可能是平均的,或可能是不平均的,因为可能有来自朝向梁的夹住的支持的任何趋向的力矩。然而,不管力分布的实际形状,力分布的形状和位置实质上是不变的,在所施加的垂直力的上下线性的定标,并且难以根据正切地施加的力来改变形状和位置。
通过使用作为部分力敏感机制的力传播梁本身,可进一步减小角度θ。图7中示意性地阐明了使用作为部分敏感机制的力传播梁720的力敏感单元的实施例。由通常连接在支持面710上的支持724支持在梁720的末端。用力712,F压在覆盖704上导至梁720的应变、挠曲和/或偏转,可以检测其中的任何一个来提供一个信号,所述信号表示通过传感器的垂直力分量。
应该理解,梁720的应变、挠曲和偏转几乎完全由施加力712,F的垂直分量支配,不考虑施加力712的角度。可对梁720定义中间平面730。在支持724上面,在中间平面730中,线711从枢轴点722传递通过点720a。线711定义了小的角度θ,其类似于上面定义的θ值。在枢轴点722处的正切力产生关于中间平面730的微小力矩,它趋向于梁720的表面稍微倾斜而接近其中心。若检测到梁的偏转,例如,如上述关于图2的电容性,若梁720和下面的电极之间的间隙不是被对称地隔开的话,则会产生微小的误差。然而,在给定力角度处维持给定准确度所要求的相对统一性比其它方法所要求的要小得多。
现在参考图8A、8B、9A、9B、10以及11A-11C说明提供优点的电容性力传感器的其它实施例,这些优点包括降低对增加灵敏度的非垂直力的灵敏度和更高的信噪比以及旋转软化。
首先参考图8A和8B,从充分平坦的支持构件802形成。电极图案成形于支持构件802上,所述支持构件802包括一个或多个与弹簧构件806相连的第一电极804以及至少第二电极808。弹簧构件806更好是有机械弹性并具有导电性。例如,可从金属或从诸如塑料这样的涂敷导电物的绝缘体来形成弹簧构件。可使用任何适合的方法把支持构件802安装在下面的支持面820上。例如,支持构件802可使用丙烯酸带(acrylic tape)822来安装,以便提供横向软化和挠曲隔离(flexural isolation)。
电容性间隙810形成于弹簧构件806和第二电极808之间。如所示,可通过用在弹簧构件806的每个末端处的微小偏移来塑造弹簧构件806的形状而形成间隙808。在不同的方法中,可以形成没有这样的偏移的弹簧构件,并且通过将弹簧构件806与第二电极808用暂时薄垫片隔开而建立间隙,然后用焊料回流第一电极804和弹簧构件806之间的连接。在另一种方法中,可使用包含特定大小微粒以隔开弹簧构件806和第一电极804的焊料来形成间隙810。
当压力的作用下把弹簧构件806压到覆盖812时,减小了间隙810的宽度,这样就改变了在第一和第二电极804和808之间测量的电容。分立的布线(Di screte wiring)814提供触摸控制器电路和电极804和808之间的电连接,以允许测量传感器800电容。弹簧构件配备有形式为凸纹的转动力轴承(pivoted force bearing)816。该结构有利地提供了抵抗极端过载的优良强度(strength)。
在一个特定的例子中,可用弹簧钢形成弹簧构件806,并可大约为250μm(10mil)厚,和约6mm(0.25”)宽。弹簧构件可大约为17mm(0.75”)长,并在模具上压制成形。电容性间隙810可为约125μm(5mil)。支持构件802可用诸如环氧玻璃PC板这样的任何合适的材料成形。PC板802通常有足够的刚度,以使诸如丙烯酸带822这样的横向软化器可放置在支持构件802和表面820之间。这种结构的未加载的电容大约为3pF,并且底部向外力(bottoming-out force)通常在约4和5磅之间。应当理解,所提供的尺寸和特定材料仅为了说明,无论如何不应作为限制。应该基于正构造的特定触摸装置的特性而选择传感器组件的尺寸。
该结构提供了这样的优点,如果表面820弯曲,则传送到支持构件802的作为结果的曲率较少,这样就减少了外围力(enclosure forces)加在测量力上的影响。
现在参考图9A和9B,电容性传感器的另一个实施例900包括用向外突出微坑916形成的弹簧构件906。图9A示意性地阐明了该情况下的传感器900,而同时图9B提供传感器900的分解图。
弹簧构件906安装在支持902上,所述支持902配备有包括一个或多个第一电极904和第二电极的电极图案。弹簧构件906与第一电极904联结,并与之隔开,例如,使用与上面相对于传感器800描述的技术中的一种技术相同的技术来实现。在弹簧构件906和第二电极之间形成电容性间隙910。横向软化器920可置于微坑916和覆盖922之间,以提供横向软化。支持构件902安装在表面924上。
在传感器900的一个特定实施例中,用弹簧钢形成150μm(6mil)厚和几乎6mm(230mils)长,大约3mm(120mil)宽的弹簧构件906。弹簧构件906也可由其它材料制成,且为不同厚度。例如,可用200μm(8mil)厚的磷青铜形成弹簧构件906。电容性间隙910可为25μm(1mil)高。在抵住相当可变形的背托(backing)(例如铝)压下弹簧构件906,可使用弹簧负载中心冲床来形成轴承微坑916。弹簧构件的自由可为约3.75mm(150mils),其中心2.15mm(86mils)与第二电极对立。传感器900的跨度未加载电容大约是3pF,而且底部向外力在约3和4磅之间。
电容性力传感器示出了容抗中的变化作为施加力变化的函数。对传感器800和900而言,这个改变对相对间隙变化是较小的较小力来说实质上是线性的。然而,使用较大的力,电容性区域的中心接近了,而同时保持边缘隔开更宽;这就导至电抗的非线性下降变得比线性更快。可在处理传感器信号时完成对这个非线性响应特性的补偿。在另一种方法中,可提供电容性传感器的不同实施例,它们所具有的固有范围比线性电抗的改变更大。这样,本发明的另一个方面是,即使在一个或多个电容器板通过响应施加力而弯曲的情况下,非统一间隙的电容性力传感器也可提供用简单信号处理来测量改善的线性。
图10中示意性地阐明了具有扩展线性响应范围的电容性传感器的一个特定实施例。在附图中放大了垂直方向的尺寸,以便更清晰地阐明传感器1000。传感器1000具有弹簧构件1006,该弹簧构件1006具有轻微弯曲的控制形状。当中心部分1006c提供相对于第二电极1008的最大电容性间隙1010时,该弯曲允许弹簧构件1006的末端1006a和1006b用最少的焊料薄膜与第一电极1004相连。第一和第二电极1004和1008形成在支持1002上。可施加到联轴器(coupling)1014上的力有一个等级,它正好足够于首先使弹簧构件1006与第二电极1008接触。还可以如此地使弹簧构件1006和第二电极1008之间的电容性间隙1010的锥体(tapering)成形,使之趋向于在沿着第二电极1008的许多点处同时出现接触。这就减少了传感器响应的非线性性。在美国专利申请第09/835,040号中对这样的传感器做了更详细的说明。
电容性力传感器的弹簧构件不必为如图8B和9B中阐明的矩形,而且不必形成为统一厚度。例如,可使弹簧构件成形,以致使挠曲集中在不作为电容器板的特定地要求的区域中。这减少了电容性区域中的挠曲,这样就增加了电抗变化的线性度。在美国专利申请第09/835.040号中进一步讨论了弹簧构件的另外的形状和形式。
可使用由在特定的一个或多个区域中涂敷的绝缘材料制成的弹簧构件来形成电容性传感器。这样的传感器的一个特定例子如参考附图11A-11C所描述。材料1102的区域,例如,环氧玻璃PC板,形成主元件(principleelement)1106。主元件1106包括台阶1107和1108,环氧玻璃基片的这样的部分用来保存与电容性间隙中变化相关联的重要弹性能量。
如从在图11B中提供的示意性横截面视图中清楚看到,预定路径使施加力从覆盖1114,通过力耦合弹性体衬垫(force-coupling elastomeric pad)1116、上部电容器板1118以及隔开/连接焊料薄膜1120,而传递到主元件1106的中心区域1122。槽1124位于中心区域1122的侧面上,槽1124既增加PC基片中的挠曲又使该挠曲相对局部化。力通过槽1124末端的向外部和周围传递,最终到达支持1126。由于力可从紧接电容性区域和槽1124处传递出去,所以任何附加的挠曲不再与电容性间隙中的力诱导的变化(force-induced changes)相关联,并且因此其不再通过力传感器。支持1126安装在表面1128上。
若存在的话,则布置在靠近传感器的支持1126可具有某些灵敏度和响应的对称性的效果。可能以对称布置来给出这样的靠近支持,诸如所示,不过度地靠近中心区域1122。可把更远的支持布置在任何期待的图案中。
弹性体衬垫1116既提供横向软化也提供旋转软化。如这样,衬垫1116可提供微坑和横向软化器920的功能。可以使该1116用粘胶固定在电容器板1118的下面,但不是附加在上面。然后,可以对诸如覆盖1126这样的在传感器1100之上的结构进行对准和加载。在另一种方法中,衬垫1116提供通过上面和下面的胶粘附件来保持对准和组合装置的可能性。
图11C中示意性地阐明的另一个实施例1150示出了通过上部电容器板1118长度传递的变更的力路径。这个上部电容器板1118现在可对与电容性间隙相关联的弹性能量存储做出显著的贡献;在这个情况下,应当理解,将上部电容器板1118视作附加的弹簧构件1106a,它与下部主元件1106或弹簧构件相呼应而工作。力从弹簧构件1106a通过焊料1130传递到下部弹簧元件1106,继续在槽1124的周围,进入中心区域1122,并从此到支持1152。
应当理解本发明的电容性力传感器可能有许多变型。这些在美国专利申请第09/835,040号中做了进一步讨论。这里讨论的实施例的变型的一个例子是可把枢轴点连接在覆盖的下边,而不是连接在力传感器的弹簧构件上。在另一个变型中,可把传感器同与支持面接触的枢轴一起安装在覆盖的下侧面。
如上指出的,本发明适用于触摸屏,并且我们相信其对减少基于力的触摸传感器的正切力灵敏度尤其有用。不应考虑本发明限制在上述特定范例中,应当认识到的是应覆盖如附加权利要求书中清楚陈述的本发明的所有方面。在本发明所针对的本领域的熟练技术人员阅读来说明书后会很容易地明白本发明可适用于不同的修改、同等过程以及许多结构。该权利要求书将包括这样的修改和装置。
Claims (31)
1.用于测定施加到触摸屏上力的位置的装置,包含:
触摸构件;
基座支持;
联结在所述触摸构件和所述基座支持之间的联结单元,所述联结单元包括具有中心部分和外围部分的梁构件,所述梁构件仅仅在所述外围部分得到梁构件支持的支持,在所述触摸构件和所述基座支持之间传递力的力路径,所述力路径在所述梁构件的中心部分和所述梁构件的外围部分之间延伸;以及
至少一个传感器元件,把它布置成测量表示由施加到所述触摸屏上的力在所述梁构件位置处产生的力的信号。
2.如权利要求1中所述的装置,其特征在于所述联结单元包括所述至少一个传感器元件。
3.如权利要求1中所述的装置,其特征在于沿着第一方向拉长所述梁构件,并且所述被拉长的梁构件具有在其外围部分处的相应第一和第二末端。
4.如权利要求1中所述的装置,其特征在于所述梁构件是具有盘外围的盘形的,并且所述外围部分包括所述盘外围的部分。
5.如权利要求1中所述的装置,其特征在于进一步包含布置在所述梁构件的第一表面上的中心部分的旋转软化器。
6.如权利要求5中所述的装置,其特征在于所述旋转软化器包括所述梁构件的第一表面的突出部分。
7.如权利要求5中所述的装置,其特征在于所述旋转软化器包括在所述梁构件的第一表面上的一部分弹性体材料。
8.如权利要求1中所述的装置,其特征在于把所述梁构件布置在所述触摸构件和所述梁构件支持之间。
9.如权利要求8中所述的装置,其特征在于所述梁构件支持是与所述基座支持一起完整地形成的。
10.如权利要求1中所述的装置,其特征在于把所述梁构件支持布置在所述触摸构件和所述梁构件之间。
11.如权利要求10中所述的装置,其特征在于所述梁构件支持是与所述触摸构件一起完整地形成的。
12.如权利要求1中所述的装置,其特征在于所述至少一个传感器元件包含用力敏感材料形成的梁构件支持中的至少一个。
13.如权利要求1中所述的装置,其特征在于所述至少一个传感器元件包括在所述梁构件和所述基座支持上的电极之间形成的电容器。
14.如权利要求13中所述的装置,其特征在于所述梁构件至少包括金属表面,以形成可相对于所述基座支持上电极移动的电容器的第一板。
15.如权利要求14中所述的装置,其特征在于用金属形成所述梁构件。
16.如权利要求14中所述的装置,其特征在于用其上布置所述金属表面的非传导材料形成所述梁构件。
17.如权利要求1中所述的装置,进一步包含布置在所述触摸构件和所述基座支持之间的横向软化器,以允许所述触摸构件相对于所述至少一个传感器元件的横向运动。
18.一种检测施加到触摸屏的触摸构件上的力的位置的方法,包含:
提供一个与所述触摸构件耦合的梁构件,所述梁构件具有中心部分和外围部分,所述梁构件仅仅在外围部分得到支持;
将至少一部分施加力传递到下列之一i)所述梁构件的中心部分,和ii)所述梁构件的外围部分;
将所述部分施加力从i)所述梁构件的中心部分和ii)所述梁构件的外围部分中的一个扩展到i)所述梁构件的中心部分和ii)所述梁构件的外围部分;以及
测量表示传递到所述梁构件的部分施加力的信号。
19.如权利要求18中所述的方法,进一步包含从在所述测量步骤中测量的信号来测定所述触摸构件上的施加力的位置。
20.如权利要求18中所述的方法,其特征在于测量表示所述部分施加力的信号包括检测由所述施加力产生的位移。
21.如权利要求18中所述的方法,进一步包含将所述触摸构件和下面支持面中的一个的扭矩与所述触摸构件和下面支持面的另一个的扭矩隔离开来。
22.如权利要求21中所述的方法,其特征在于:隔离所述扭矩包括旋转布置在所述触摸构件和所述下面支持面之间的旋转轴承。
23.如权利要求21中所述的方法,其特征在于:隔离所述扭矩包括旋转布置在所述触摸构件和所述下面支持面之间的弹性体轴承。
24.如权利要求18中所述的方法,其特征在于:扩展部分所述施加力包括将部分所述施加力扩展比所述力传播器的厚度更长的距离。
25.如权利要求18中所述的方法,其特征在于:测量表示部分所述施加力的信号包括压缩力敏感材料并检测所述力敏感材料特性中所产生的变化。
26.如权利要求18中所述的方法,其特征在于:测量表示部分所述施加力的信号包括改变电容器的电容量并测量电容量的变化。
27.如权利要求26中所述的方法,其特征在于:所述梁构件形成一个所述电容器的传导表面,并且改变所述电容器的电容量包括相对于所述电容器的第二传导表面移动所述梁构件。
28.如权利要求18中所述的方法,进一步包含将所述梁构件与施加到所述触摸构件上的正切力隔离。
29.如权利要求28中所述的方法,其特征在于:将所述与正切力隔离包括在所述触摸构件和下面支持面之间布置横向软化器。
30.如权利要求18中所述的方法,其特征在于进一步包含通过所述触摸构件向用户显示图像。
31.如权利要求30中所述的方法,其特征在于进一步包含响应于所述施加力而改变所述图像。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/835,049 | 2001-04-13 | ||
| US09/835,040 US20020149571A1 (en) | 2001-04-13 | 2001-04-13 | Method and apparatus for force-based touch input |
| US09/835,049 US7183948B2 (en) | 2001-04-13 | 2001-04-13 | Tangential force control in a touch location device |
| US09/835,040 | 2001-04-13 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1502090A CN1502090A (zh) | 2004-06-02 |
| CN1270226C true CN1270226C (zh) | 2006-08-16 |
Family
ID=27125753
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB028081463A Expired - Fee Related CN1270227C (zh) | 2001-04-13 | 2002-04-12 | 带有旋转隔离式力传感器的触摸屏 |
| CNB028081218A Expired - Fee Related CN1270226C (zh) | 2001-04-13 | 2002-04-12 | 力传感器和使用力传感器的触摸面板 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB028081463A Expired - Fee Related CN1270227C (zh) | 2001-04-13 | 2002-04-12 | 带有旋转隔离式力传感器的触摸屏 |
Country Status (5)
| Country | Link |
|---|---|
| EP (2) | EP1382007A2 (zh) |
| JP (2) | JP2005502103A (zh) |
| KR (2) | KR20030090732A (zh) |
| CN (2) | CN1270227C (zh) |
| WO (2) | WO2002084580A1 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103282864A (zh) * | 2010-12-30 | 2013-09-04 | 摩托罗拉移动有限责任公司 | 用于触摸和微移接口的方法和装置 |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8488308B2 (en) | 2003-02-12 | 2013-07-16 | 3M Innovative Properties Company | Sealed force-based touch sensor |
| US7109976B2 (en) | 2003-04-01 | 2006-09-19 | 3M Innovative Properties Company | Display screen seal |
| US7148882B2 (en) * | 2003-05-16 | 2006-12-12 | 3M Innovatie Properties Company | Capacitor based force sensor |
| CN100381993C (zh) * | 2005-02-23 | 2008-04-16 | 刘二中 | 一种带有触压板的信息输入装置和方法 |
| CN101000529B (zh) * | 2006-01-13 | 2011-09-14 | 北京汇冠新技术股份有限公司 | 一种用于红外触摸屏的触摸力检测装置 |
| DE102007041876A1 (de) * | 2007-09-04 | 2009-03-05 | Vodafone Holding Gmbh | Berührungssensitive Anzeigeeinrichtung |
| JPWO2010067537A1 (ja) * | 2008-12-08 | 2012-05-17 | シャープ株式会社 | 操作受付装置及びコンピュータプログラム |
| CN102388354A (zh) * | 2009-02-17 | 2012-03-21 | 诺亚·安格林 | 漂浮平面触摸检测系统 |
| CN102043501B (zh) | 2009-10-26 | 2016-03-23 | 宸鸿光电科技股份有限公司 | 力感测器的集成排线模块及压感式触控荧幕 |
| KR101124225B1 (ko) * | 2009-11-06 | 2012-04-12 | 한국표준과학연구원 | 센서일체형 터치입력장치 및 그의 제조방법 |
| CN102096493A (zh) * | 2009-12-11 | 2011-06-15 | 佳士得科技股份有限公司 | 荷重元触控装置 |
| CN101859201B (zh) * | 2010-06-02 | 2012-06-27 | 深圳莱宝高科技股份有限公司 | 触摸输入装置及电子设备 |
| US20120120017A1 (en) * | 2010-11-17 | 2012-05-17 | Synaptics Incorporated | System and method for determining object information using an estimated deflection response |
| WO2012096213A1 (ja) * | 2011-01-12 | 2012-07-19 | アルプス電気株式会社 | 押圧式入力装置 |
| US8720276B2 (en) | 2011-03-24 | 2014-05-13 | Medtronic, Inc. | Moment fraction computation for sensors |
| US9519350B2 (en) | 2011-09-19 | 2016-12-13 | Samsung Electronics Co., Ltd. | Interface controlling apparatus and method using force |
| US9501098B2 (en) | 2011-09-19 | 2016-11-22 | Samsung Electronics Co., Ltd. | Interface controlling apparatus and method using force |
| CN102928008B (zh) * | 2012-11-13 | 2015-04-01 | 上海华勤通讯技术有限公司 | 移动终端的传感器密封装置及其移动终端 |
| CN107256102B (zh) * | 2013-08-06 | 2021-04-20 | 群创光电股份有限公司 | 触控显示装置 |
| US20160203710A1 (en) | 2013-08-23 | 2016-07-14 | Apple Inc. | Remote control device |
| US10032592B2 (en) | 2013-08-23 | 2018-07-24 | Apple Inc. | Force sensing switch |
| DE102014019128A1 (de) | 2014-12-19 | 2016-06-23 | Audi Ag | Bedieneinrichtung für ein Kraftfahrzeug, Kraftfahrzeug und Verfahren zum Betreiben einer Bedieneinrichtung |
| KR102557074B1 (ko) * | 2015-12-07 | 2023-07-18 | 닐스 아에이지 줄 에일러센 | 로드 셀 |
| CN105827229A (zh) * | 2016-03-15 | 2016-08-03 | 歌尔声学股份有限公司 | 一种压力感应模组、压力感应系统及电子设备 |
| CN106445241B (zh) * | 2016-10-26 | 2021-03-26 | 京东方科技集团股份有限公司 | 触控显示屏、触点识别方法及模块、触控显示装置 |
| DE102017200595A1 (de) * | 2016-11-15 | 2018-05-17 | Volkswagen Aktiengesellschaft | Vorrichtung mit berührungsempfindlicher Freiformfläche und Verfahren zu deren Herstellung |
| US10635248B2 (en) * | 2018-01-05 | 2020-04-28 | Amtel Corporation | Force sensor mount and related housings and systems that incorporate the same |
| JP2019185164A (ja) | 2018-04-03 | 2019-10-24 | 富士通コンポーネント株式会社 | 触感提示装置 |
| CN110553761A (zh) * | 2018-05-30 | 2019-12-10 | 苏州明皜传感科技有限公司 | 力量传感器 |
| US11379080B2 (en) | 2020-06-05 | 2022-07-05 | International Business Machines Corporation | Automatically correcting touchscreen errors |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4355202A (en) * | 1980-12-08 | 1982-10-19 | Bell Telephone Laboratories, Incorporated | Mounting arrangement for a position locating system |
| JPH0228168B2 (ja) * | 1984-12-21 | 1990-06-21 | Nippon Denki Hoomu Erekutoronikusu Kk | Tategatazahyonyuryokusochi |
| GB2180342B (en) * | 1985-08-14 | 1989-10-25 | Alcom Limited | Pressure sensitive device |
| CA2072730A1 (en) * | 1991-09-09 | 1993-03-10 | Richard L. Garwin | Strain-gauge mounting for force-sensing touch-screen |
| DE9203286U1 (zh) * | 1992-03-13 | 1992-05-07 | Baltus, Rene, 5303 Bornheim, De |
-
2002
- 2002-04-12 KR KR10-2003-7013369A patent/KR20030090732A/ko not_active Application Discontinuation
- 2002-04-12 WO PCT/US2002/011453 patent/WO2002084580A1/en active Application Filing
- 2002-04-12 KR KR10-2003-7013306A patent/KR20040060849A/ko not_active Application Discontinuation
- 2002-04-12 JP JP2002582447A patent/JP2005502103A/ja not_active Withdrawn
- 2002-04-12 JP JP2002582448A patent/JP2005508533A/ja not_active Withdrawn
- 2002-04-12 EP EP02719482A patent/EP1382007A2/en not_active Withdrawn
- 2002-04-12 CN CNB028081463A patent/CN1270227C/zh not_active Expired - Fee Related
- 2002-04-12 WO PCT/US2002/011308 patent/WO2002084579A2/en active Application Filing
- 2002-04-12 CN CNB028081218A patent/CN1270226C/zh not_active Expired - Fee Related
- 2002-04-12 EP EP02762052A patent/EP1390908A1/en not_active Withdrawn
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103282864A (zh) * | 2010-12-30 | 2013-09-04 | 摩托罗拉移动有限责任公司 | 用于触摸和微移接口的方法和装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1382007A2 (en) | 2004-01-21 |
| WO2002084579A2 (en) | 2002-10-24 |
| KR20030090732A (ko) | 2003-11-28 |
| WO2002084579A3 (en) | 2003-09-04 |
| CN1502091A (zh) | 2004-06-02 |
| CN1502090A (zh) | 2004-06-02 |
| JP2005502103A (ja) | 2005-01-20 |
| KR20040060849A (ko) | 2004-07-06 |
| JP2005508533A (ja) | 2005-03-31 |
| EP1390908A1 (en) | 2004-02-25 |
| WO2002084580A1 (en) | 2002-10-24 |
| CN1270227C (zh) | 2006-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1270226C (zh) | 力传感器和使用力传感器的触摸面板 | |
| US7196694B2 (en) | Force sensors and touch panels using same | |
| US8982081B2 (en) | Displacement sensing touch panel and touch screen using the same | |
| US9354752B2 (en) | Sensor apparatus and information processing apparatus | |
| KR101566571B1 (ko) | 힘 감지 터치 반응 입력장치 | |
| JP5625669B2 (ja) | センサ装置および情報処理装置 | |
| KR101691278B1 (ko) | 휨 빔에 의해 지지되는 플랫폼 상의 하중 측정을 위한 모멘트 보상형 휨 빔 센서 | |
| US9983696B2 (en) | Force-sensing stylus for use with electronic devices | |
| TWI675191B (zh) | 顯示一體型輸入裝置 | |
| US20150177899A1 (en) | Elastomeric shear Material Providing Haptic Response Control | |
| US20200348757A1 (en) | Force sensors for haptic surfaces | |
| US20200150845A1 (en) | Pressure detecting and information input device | |
| US20110007026A1 (en) | Positioning method for touch screen | |
| TW200401220A (en) | Touch sensor | |
| CN105890830B (zh) | 一种压力感测装置 | |
| TW201543015A (zh) | 壓力檢測裝置 | |
| KR20140048007A (ko) | 플렉시블 디스플레이 장치 | |
| US9588616B2 (en) | Cantilevered displacement sensors and methods of determining touching forces on a touch screen | |
| US10969895B2 (en) | Input device | |
| JP6903200B2 (ja) | タッチパネル装置、押下力算出方法、及び押下力算出プログラム | |
| US10051724B1 (en) | Structural ground reference for an electronic component of a computing device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C19 | Lapse of patent right due to non-payment of the annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |