CN116234766A - Remote automatic RTG system, control method of remote automatic RTG system and control device of remote automatic RTG system - Google Patents
Remote automatic RTG system, control method of remote automatic RTG system and control device of remote automatic RTG system Download PDFInfo
- Publication number
- CN116234766A CN116234766A CN202180053260.3A CN202180053260A CN116234766A CN 116234766 A CN116234766 A CN 116234766A CN 202180053260 A CN202180053260 A CN 202180053260A CN 116234766 A CN116234766 A CN 116234766A
- Authority
- CN
- China
- Prior art keywords
- rtg
- crane
- remote automatic
- operation request
- request
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/40—Applications of devices for transmitting control pulses; Applications of remote control devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/48—Automatic control of crane drives for producing a single or repeated working cycle; Programme control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C19/00—Cranes comprising trolleys or crabs running on fixed or movable bridges or gantries
Abstract
A remote automatic RTG system, comprising: a plurality of RTG cranes; a plurality of operation tables with which an operator can remotely operate the RTG crane; and a control unit that associates an idle operation table, which is not associated with any RTG crane, of the plurality of operation tables with an operation request RTG crane, which has transmitted an operation request requesting an operation by an operator, of the plurality of RTG cranes, wherein the control unit has an operation unit that adjusts an order in which the association between the operation request RTG crane and the idle operation table is established, according to a predetermined condition.
Description
Technical Field
The invention relates to a remote automatic RTG system, a control method of the remote automatic RTG system and a control device of the remote automatic RTG system.
Background
Conventionally, a remote automatic RTG system including a plurality of RTG (Rubber Tyred Gantry Crane/tire gantry crane) cranes has been known. Patent document 1 describes a remote automatic RTG system including a plurality of RTG cranes and a plurality of operation tables. The RTG crane of the remote automatic RTG system is switched from automatic operation to operation by an operator through an operating table.
Technical literature of the prior art
Patent literature
Patent document 1: japanese patent laid-open No. 2004-123367
Disclosure of Invention
Technical problem to be solved by the invention
Here, in a remote automatic RTG system, it is required to control a plurality of RTG cranes with fewer operation tables. Therefore, it is required to reduce the number of operation tables with respect to the number of RTG cranes.
The invention aims to provide a remote automatic RTG system, a control method of the remote automatic RTG system and a control device of the remote automatic RTG system, which can reduce the number of operation tables relative to the number of RTG cranes.
Means for solving the technical problems
The remote automatic RTG system according to the present invention includes: a plurality of RTG cranes; a plurality of operation tables with which an operator can remotely operate the RTG crane; and a control unit that associates an idle operation table, which is not associated with any RTG crane, of the plurality of operation tables with an operation request RTG crane, which has transmitted an operation request requesting an operation by an operator, of the plurality of RTG cranes, wherein the control unit has an operation unit that adjusts an order in which the association between the operation request RTG crane and the idle operation table is established, according to a predetermined condition.
In the remote automatic RTG system, the control unit associates an idle operation station of the plurality of operation stations, which is not associated with any RTG crane, with an operation request RTG crane of the plurality of RTG cranes, which has transmitted an operation request requesting an operation by an operator. In this case, the control unit includes an arithmetic unit that adjusts the order of association between the operation request RTG crane and the idle operation table according to a predetermined condition. Therefore, in the case where the operation table is idle, the operation section can quickly associate the idle operation table with the operation request RTG crane. On the other hand, in the case where the operation table is not idle and there is an operation request RTG crane in standby, the control section may appropriately adjust how the operation request RTG crane is associated when the operation table becomes idle next, as the case may be. That is, the idle operation table and the operation request RTG crane can be associated with each other at an appropriate timing according to circumstances without preparing an excessive number of operation tables with respect to the number of RTG cranes. Thereby, the number of operation tables can be reduced with respect to the number of RTG cranes.
The operation unit may associate the idle operation stations according to the order of the operation requests. In this case, the arithmetic unit may preferentially associate the operation request RTG crane having a longer standby time with the idle operation table.
The operation unit may associate the idle operation stations according to the urgency sequence of the operation request. In this case, the arithmetic unit may preferentially associate the operation request RTG crane with the free operation console, which has a high degree of urgency.
The computing unit may associate the free operation panel according to the type of loading and unloading of the operation request RTG crane. In this case, the arithmetic unit may be configured to preferentially associate the operation request RTG crane with the free operation console, the operation request RTG crane being associated with the loading and unloading of the type having the higher priority.
The operation unit may associate the free operation panel with the operation area of the operation request RTG crane. In this case, the arithmetic unit may preferentially associate the operation request RTG crane with the free operation table in relation to the work area having the high priority level.
The arithmetic unit may associate the free operation stations according to the priority order of the containers for which the RTG crane is requested to perform the work. In this case, the arithmetic unit may be configured to associate the operation request RTG crane for performing the work on the container having the higher priority level with the free operation table preferentially.
For the order in which the idle operation stations are associated obtained according to the order of the operation requests, the operation section may correct the order according to other conditions. In this case, the operation section may adjust the order in which the association with the idle operation stations is established in accordance with the order of the operation requests while taking other conditions into consideration.
The operation unit may create a sequential waiting list associating the free operation stations with the operation request RTG crane, and may associate the free operation stations in the order on the list. In this case, by referring to the order waiting list, it is possible to easily grasp which operation request RTG crane is associated with which idle operation station.
The operation request may include information indicating a condition of the operation request RTG crane that is the subject. Thus, the arithmetic unit can adjust the association with the free operation console in consideration of the situation of the operation request RTG crane.
The remote automatic RTG system according to the present invention is a control method for a remote automatic RTG system, comprising: a plurality of RTG cranes; and a plurality of operation tables capable of operating the RTG crane, wherein the control method adjusts, according to a predetermined condition, an order in which an idle operation table of the plurality of operation tables, which is not associated with any RTG crane, is associated with an operation request RTG crane of the plurality of RTG cranes, which has transmitted an operation request requesting an operator to operate.
The remote automatic RTG system control device according to the present invention controls a remote automatic RTG system including: a plurality of RTG cranes; and a plurality of operation tables capable of operating the RTG crane, wherein the remote automatic RTG system control device adjusts, according to a predetermined condition, an order in which an idle operation table of the plurality of operation tables, which is not associated with any RTG crane, is associated with an operation request RTG crane of the plurality of RTG cranes, which has transmitted an operation request requesting an operator to operate.
According to the control method and the control device of the remote automatic RTG system, the same operational effects as those of the remote automatic RTG system can be obtained.
Effects of the invention
According to the present invention, there are provided a remote automatic RTG system, a control method of the remote automatic RTG system, and a control device of the remote automatic RTG system, which can reduce the number of operation tables with respect to the number of RTG cranes.
Drawings
Fig. 1 is a plan view showing an exemplary container terminal 1 to which the remote automatic RTG system according to the present embodiment is applied.
Fig. 2 is a perspective view schematically showing an RTG crane disposed on a container yard.
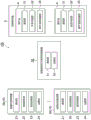
Fig. 3 is a block diagram showing functions of the remote automatic RTG system according to this embodiment.
Fig. 4 (a), (b) and (c) are diagrams showing specific examples of the sequential waiting list.
Fig. 5 is a flowchart showing the processing contents in the remote automatic RTG system control apparatus in the case where an operation request is issued from a certain RTG crane to the remote automatic RTG system control apparatus.
Fig. 6 is a flowchart showing processing contents in the remote automatic RTG system control apparatus in the case where information that a certain console is idle is transmitted to the remote automatic RTG system control apparatus.
Detailed Description
Hereinafter, embodiments of a remote automatic RTG system, a control method of the remote automatic RTG system, and a control device of the remote automatic RTG system according to the present invention will be described with reference to the drawings. In the description of the drawings, the same or corresponding elements are denoted by the same reference numerals, and repetitive description thereof will be omitted as appropriate. In the drawings, some parts may be simplified or exaggerated for the sake of understanding, and the dimensional ratios and the like are not limited to those described in the drawings.
Fig. 1 is a plan view showing an exemplary container terminal 1 to which a remote automatic RTG system 100 according to this embodiment is applied. As shown in fig. 1, the container terminal 1 is provided with: a container yard 2 in which containers 3 (see fig. 2) are arranged, a plurality of gantry cranes 4 for transferring the containers 3 to a ship on the shore, a plurality of RTG cranes 10 arranged in the container yard 2 for loading and unloading the containers 3, and a remote operation room 5 capable of remotely operating the plurality of RTG cranes 10.
For example, a travel path for a transport vehicle such as a truck, a trailer, or an AGV (Automated Guide Vehicle: automatic transport vehicle) is laid on the container yard 2. The RTG crane 10 acquires the container 3 carried by the carrying trolley and places the container 3 on the container yard 2 at a position indicated by a predetermined number. For example, a plurality of RTG cranes 10 are respectively arranged on each container yard 2. The RTG crane 10 acquires the container 3 placed on the container yard 2, transfers the container 3 to the transfer cart, and carries the container 3 out of the transfer cart.
Fig. 2 is a perspective view schematically showing the RTG crane 10 disposed on the container yard 2. As shown in fig. 2, the RTG crane 10 is a container handling crane for handling the container 3, and is a tire gantry crane (RTG: rubber Tired Gantry Crane). The RTG crane 10 automatically loads and unloads containers 3 placed in the container yard 2 on the container terminal 1.
The RTG crane 10 includes, for example, a crane carriage 11 capable of traversing a crane girder, a spreader 12 for loading and unloading the container 3, and a traveling device 13 having wheels. The RTG crane 10 includes a pair of leg portions erected on a pair of traveling devices 13 and a crane main beam connecting upper ends of the pair of leg portions to each other, and the pair of leg portions and the crane main beam are portal-shaped. The crane carriage 11 is moved laterally by driving a traverse motor, for example. As an example, the crane carriage 11 has a drum driven by a drum driving motor to rotate in the forward and reverse directions, and suspends the hoist 12 by a wire rope.
The spreader 12 is a spreader for lifting the container 3. The spreader 12 can lock the container 3 from above, and load and unload the container 3 by locking and hoisting the container 3. For example, the operation and position of the spreader 12 are controlled by the remote automatic RTG system 100, the remote automatic RTG system control method, and the remote automatic RTG system control device 50 according to the present embodiment.
Fig. 3 is a block diagram showing the functions of the remote automatic RTG system 100 according to this embodiment. The remote automatic RTG system 100 is a system that controls a plurality of RTG cranes 10. As shown in fig. 3, the remote automatic RTG system 100 includes a plurality of RTG cranes 10, a plurality of operation tables 6 capable of operating each RTG crane 10, and a remote automatic RTG system control device 50 (control unit). Fig. 3 is a block diagram showing a crane control device 20 included in the RTG crane 10.
The console 6, the crane control device 20, and the remote automatic RTG system control device 50 may be configured as a general computer, and may include, for example, a processor, a memory, a storage device (storage), a communication interface, and a user interface. The processor is an operator such as a CPU (Central Processing Unit: central processing unit). The Memory is a storage unit such as a ROM (Read Only Memory) or a RAM (Random Access Memory: random access Memory). The storage device is a storage section (storage medium) such as an HDD (Hard Disk Drive). The communication interface is a communication device that implements data communication. The processor controls the memory, the storage device, the communication interface, and the user interface. In the operation panel 6, the crane control apparatus 20, and the remote automatic RTG system control apparatus 50, for example, various functions are realized by loading a program stored in the ROM into the RAM and executing the program loaded into the RAM by the CPU. The user interfaces of the console 6 and the crane control device 20 include a display for display output, an output device such as a speaker for sound output, and input devices such as a joystick, buttons, a keyboard, a touch panel, and a microphone. The remote automatic RTG system control device 50 may be configured by one computer installed in one location, may be configured by a plurality of computers, or may be configured to be distributed among a plurality of locations.
The crane control device 20 includes a communication unit 21, an information acquisition unit 22, a drive control unit 23, and a calculation unit 24. The communication section 21 communicates with other devices to transmit and receive various information. The information acquisition unit 22 acquires information indicating various states for automatically operating the RTG crane 10. The information acquisition unit 22 acquires information from various sensors provided in the RTG crane 10. The drive control unit 23 transmits a control signal to a drive unit such as a motor of the RTG crane 10 to perform drive control. When the operation is performed by the operation of the operator, the drive control unit 23 performs drive control in accordance with the operation. In the automatic operation, the drive control unit 23 performs drive control so that the operation calculated by the calculation unit 24 can be realized. The arithmetic unit 24 performs various arithmetic operations related to the RTG crane 10. In the automatic operation, the operation unit 24 calculates the operation content of the RTG crane 10.
Here, when the crane is automatically operated, the crane control apparatus 20 can determine the situation and actively transmit the operation request of the console 6. That is, the arithmetic unit 24 includes remote operation necessity determining logic for improving the operation efficiency and safety of the system, and determines whether or not the operation request of the console 6 is necessary based on the logic. The communication unit 21 transmits an operation request to the remote automatic RTG system control device 50.
Specifically, during the loading and unloading operation of stacking the containers 3 on the truck, the operation unit 24 may make an operation request when the automatic transfer of the spreader 12 in front of the chassis truck (chassis) area is completed (condition 1). During the loading/unloading operation of picking up the container 3 from the truck, the operation unit 24 may make an operation request when the automatic transfer of the spreader 12 in front of the chassis region is completed (condition 2). The operation unit 24 may make an operation request when an abnormality related to the control system is detected.
The operation unit 24 may make an operation request only when the arrival of the truck is detected in the above-described "condition 1" or "condition 2". Alternatively, the arithmetic unit 24 may make an operation request when detecting that the truck has arrived, regardless of the above-described "condition 1" and "condition 2". The RTG crane 10 may also include a sensor for detecting that the chassis truck is stopped at a predetermined stop position.
The operation unit 24 may make an operation request when a state of high safety risk is detected. When the detection function is started in a state where the safety risk is considered to be high, the arithmetic unit 24 may actively stop the automatic operation. The arithmetic unit 24 may send a request signal for the console 6 to the remote automatic RTG system control device 50 to prompt the operator to confirm and restore the state while actively stopping the automatic operation.
Specifically, the following conditions are given as the state in which the safety risk is high. For example, the operation unit 24 may detect a state of high safety risk when the spreader 12 is located in an area interfering with the chassis truck stopped at the predetermined stop position, and may perform an operation request. To detect this state, the RTG crane 10 is provided with a system for detecting the winding degree and traversing position of the spreader 12. Thus, the RTG crane 10 may have a function of determining whether or not the spreader 12 has entered the area where the chassis truck interferes.
The operation unit 24 may detect a state of high safety risk when it is determined that the possibility of contact between the spreader 12 or the suspended object and the storage container is high or when it is determined that the possibility of contact is high, and may make an operation request. To detect this state, the RTG crane 10 may be provided with a system for monitoring whether or not the spreader 12 or the suspended object is in contact with the storage container by a laser range finder, a 2D scanner, or other 3D scanner, etc. provided below, on the side of, or above the spreader 12. Alternatively, the RTG crane 10 may be provided with a system for monitoring whether or not the spreader 12 or the suspended object is in contact with the storage container by a 2D scanner or a 3D scanner or the like mounted on the crane carriage 11.
The operation unit 24 can detect a state of high safety risk when the spreader 12 or the suspended object is largely shaken, and can perform an operation request. In this case, the RTG crane 10 may be provided with a system for monitoring the swing signal of the spreader 12 acquired by the image processing system, the accelerometer, the inclinometer, or the like, and recognizing that the crane is in an abnormal state when the swing signal is out of the normal range of the swing amount.
The operation unit 24 can detect a state of high safety risk when the spreader 12 or the suspended object is greatly inclined, and can perform an operation request. In this case, the RTG crane 10 may be provided with a system for monitoring the inclination signal of the spreader 12 acquired by the image processing system, the accelerometer, the inclinometer, or the like, and recognizing that the crane is in an abnormal state when the inclination signal is out of the normal range of inclination.
The operation unit 24 can detect a state of high safety risk when the spreader 12 or the suspended object is rotated greatly, and can perform an operation request. In this case, the RTG crane 10 may be provided with a system that monitors the rotation (also referred to as a small rotation) of the spreader 12 acquired by an image processing system, an accelerometer, an inclinometer, or the like, and recognizes that it is in an abnormal state when it is out of the normal range of rotation.
The operation unit 24 can detect a state of high safety risk when an impact is applied to the spreader 12 or the suspended object, and can perform an operation request. In this case, the RTG crane 10 may be provided with a system in which the spreader 12 has a sensor for detecting an impact other than an accelerometer or an inclinometer and recognizes an abnormality when an impact that is not normally detected.
The calculation unit 24 can detect a state of high safety risk when the load of the spreader 12 or the suspended object greatly changes, and can perform an operation request. In this case, the RTG crane 10 may be provided with a system that includes a device for detecting the load of the spreader 12 or the suspended object and that recognizes that the load is abnormal when the change amount exceeding the load change amount in the normal case is detected.
The arithmetic unit 24 may make an operation request when the container 3 is automatically stacked or the container 3 is automatically gripped. The arithmetic unit 24 may send a request signal of the console 6 to the remote automatic RTG system control device 50 to prompt the operator to confirm and restore the state.
Specifically, the following is an example of failure in automatically stacking the containers 3. For example, the arithmetic unit 24 may make an operation request when the container 3 is automatically stacked but the loading accuracy is insufficient. In this case, the RTG crane 10 may be provided with a relative positional deviation detecting device between the hoist 12 and the storage container, for example, a 3D scanner or the like on the crane carriage 11, in addition to the relative positional deviation detecting device between the hoist 12 and the storage container. The arithmetic unit 24 makes an operation request when the container stacking accuracy is out of the allowable range.
The arithmetic unit 24 may give up the automatic stacking operation request when the container 3 is to be automatically stacked but the suspended position does not fall within a predetermined range. In this case, the RTG crane 10 may be provided with a relative positional deviation detecting device between the hoist 12 and the storage container, for example, a 3D scanner or the like on the crane carriage 11, in addition to the relative positional deviation detecting device between the hoist 12 and the storage container. If the condition for allowing the relative positional deviation of the container 3 to automatically land is not satisfied after a lapse of a predetermined period of time, the operation unit 24 makes an operation request.
The arithmetic unit 24 may make an operation request when the relative position of the stacked containers 3 is attempted to be detected for automatically stacking the containers 3 but the relative position is not normally detected. In this case, the RTG crane 10 may be provided with a relative positional deviation detecting device between the hoist 12 or the suspended object and the storage container, for example, a 2D scanner or a 3D scanner on the crane carriage 11, in addition to the relative positional deviation detecting device between the hoist 12 and the storage container. The arithmetic unit 24 makes an operation request when the detected relative position is abnormal.
Further, as an example of failure in automatically gripping the container 3, the following can be given. For example, in a case where a guide plate (flip) rides on the container 3 or a twist lock cannot be accommodated in a corner fitting (corner casting) of the container 3 when automatically gripping the container 3, if any one of "the implantation detection signal is not identical at 4 points", "the inclination of the spreader is out of the normal range", "the swing displacement of the spreader is out of the normal range" is reached, the arithmetic unit 24 may determine that the automatic gripping has failed and may make an operation request.
If the vibration of the spreader 12 does not fall within the predetermined range while the container 3 is intended to be automatically gripped, the operation unit 24 can make an operation request.
The operation unit 24 can make an operation request if a situation is made in which the container 3 is intended to be automatically grasped but the relative position between the spreader 12 and the storage container does not fall within the allowable range. In this case, the RTG crane 10 may be provided with a plurality of laser rangefinders, 2D scanners, or the like, which are included in the spreader 12, as the relative position detecting means between the spreader 12 and the storage container. Alternatively, the RTG crane 10 includes a 2D scanner or a 3D scanner included in the crane carriage 11 as a relative position detecting device. When the relative position between the spreader 12 and the storage container detected by these detecting means does not fall within the allowable range after a certain time has elapsed, the operation unit 24 makes an operation request.
If the condition is that the container 3 is to be automatically grasped but the relative position between the spreader 12 and the storage container cannot be detected normally, the operation unit 24 can make an operation request. The arithmetic unit 24 makes an operation request when the detection device fails.
The console 6 includes a communication unit 31, a state determination unit 32, and an operation information creation unit 33. The communication section 31 communicates with other devices to transmit and receive various information. The state determination unit 32 determines whether the operation panel 6 is in a state of being associated with any one of the RTG cranes 10 or a state of not being associated with any of the RTG cranes 10. The operation information creation unit 33 creates operation information to be transmitted to the RTG crane 10 according to an operation by an operator. The state in which the console 6 is associated with the RTG crane 10 is: the operator can remotely operate the specific RTG crane 10 using the operation table 6. The operation panel 6 in a state of being associated with the specific RTG crane 10 receives information necessary for remote operation from the RTG crane 10 of the operation target. The information required for the remote operation is, for example, an image captured by an imaging device mounted on the RTG crane 10. The state in which the console 6 does not establish an association with the RTG crane 10 means that: the console 6 does not receive the information required for the remote operation.
The remote automatic RTG system control device 50 includes a communication unit 51 and a calculation unit 52. The communication section 51 communicates with other devices to transmit and receive various information. The arithmetic unit 52 performs various arithmetic operations concerning the remote automatic RTG system control device 50. In particular, in the present embodiment, the arithmetic unit 52 associates an operation console 6 (idle operation console) which is not associated with any RTG crane 10 among the plurality of operation consoles with an RTG crane 10 (operation request RTG crane) which has transmitted an operation request requesting an operation by an operator among the plurality of RTGs.
Next, a detailed description will be given of how the remote automatic RTG system control device 50 associates the plurality of RTG cranes 10 with the plurality of operation tables 6. The calculation unit 52 of the remote automatic RTG system control device 50 acquires information on the idle state of each console 6 through the communication unit 51. The state in which the console 6 is idle means that: the operation table 6 is not associated with any of the RTG cranes 10, and thus cannot operate any of the RTG cranes 10. The state in which the console 6 is not idle means that: the operation table 6 is associated with one of the RTG cranes 10, and is capable of operating the RTG crane 10. The calculation unit 52 may acquire an operation request from each RTG crane 10 through the communication unit 51.
When an operation request of any one of the RTG cranes 10 is acquired in a state where there is an empty console 6, the arithmetic unit 52 associates the RTG crane 10 that transmitted the operation request with any one of the empty consoles 6. When an operation request of any one of the RTG cranes 10 is acquired without the idle operation table 6, the computing unit 53 sets the RTG crane 10 that has transmitted the operation request to a standby state until the idle operation table 6 is present. When the plurality of RTG cranes 10 are in the standby state, the arithmetic unit 52 adjusts the order of association with the operation table 6 according to the condition of each RTG crane 10.
For example, the arithmetic unit 52 may associate the free operation stations 6 according to the order of the operation requests. That is, the arithmetic unit 52 associates the RTG crane 10, which has sent the operation request earlier, with the free operation console 6 among the RTG cranes 10 in the standby state.
The arithmetic unit 52 may associate the free console 6 according to the order of urgency of the operation request. That is, the arithmetic unit 52 grasps why the RTG crane 10 has issued the operation request and sorts the reasons for urgency, and associates the RTG crane 10 having higher urgency with the free console 6 earlier. For example, items such as "a state in which a safety risk is high is identified", "related to container transfer between trucks", "occurrence of a system abnormality", "automatic stacking or automatic gripping failure of containers", and the like may be mentioned, and the degree of urgency may be set to be high in this order. However, the order is not particularly limited, and the setting may be changed with respect to the rank, or an item may be added.
The arithmetic unit 52 may associate the free operation stations according to the type of the loading/unloading of the RTG crane 10 that transmitted the operation request. That is, the arithmetic unit 52 associates the RTG crane 10 of the loading and unloading type higher in rank with the free operation table 6 earlier. For example, the loading and unloading types such as "ship loading and unloading", "loading and unloading by a foreign truck", "arrangement replacement of a storage container", and "standby movement" may be mentioned, and the rank may be set high in this order. However, the order is not particularly limited, and the setting may be changed with respect to the rank, or an item may be added.
The arithmetic unit 52 may associate the free operation panel 6 with each other based on the work area of the RTG crane 10 that has transmitted the operation request. That is, the arithmetic unit 52 associates the RTG crane 10 of the loading and unloading type higher in rank with the free operation table 6 earlier. For example, the work areas such as "1 st berth", "2 nd berth", and "3 rd berth" may be given, and the number of ranks may be set to be high in this order. However, the order is not particularly limited, and the setting may be changed with respect to the rank, or an item may be added.
The arithmetic unit 52 may associate the free operation panel 6 according to the priority order of the containers in which the RTG crane 10 that has transmitted the operation request performs the work. That is, the arithmetic unit 52 associates the RTG crane 10 that works on the container with the next highest position with the free console 6 earlier. For example, containers such as "most important customer container", "general customer container" and the like may be cited, and the rank may be set high in this order. However, the order is not particularly limited, and the setting may be changed with respect to the rank, or an item may be added.
As described above, the predetermined conditions for adjusting the order of association include the order of operation requests, the urgency of operation requests, the type of loading and unloading, the work area, the priority order of containers, and the like, but the arithmetic unit 52 may perform condition setting for any one of the conditions, and associate the free operation panel 6 with the RTG crane 10, or may perform condition setting in combination of the conditions. For example, in the case of combining the conditions, the arithmetic unit 52 may set the condition to be prioritized and the condition with a low priority level by weighting the respective conditions. For example, the arithmetic unit 52 may set a score or the like according to the rank or priority of each condition, so that the higher the RTG crane 10, the earlier the RTG crane 10 is associated with the free operation console 6. The condition of the operation request is information included in the operation request when the crane control device 20 of the RTG crane 10 transmits the operation request.
The arithmetic unit 52 may correct the order of the operation stations 6 that are free, which is obtained according to the order of the operation requests, according to other conditions. That is, the arithmetic unit 53 sets the order of association according to the order of operation requests in the above conditions, and then corrects the order of association in consideration of the urgency of operation requests, the type of loading and unloading, the work area, and the priority order of containers.
The arithmetic unit 52 may create a sequential waiting list in which the free operation console 6 is associated with the RTG crane 10 that transmitted the operation request, and may associate the free operation console 6 in the order on the list. In addition, the order waiting list may be disclosed to an operator or the like. Fig. 4 shows a specific example of the order waiting list. The list shows the order in which the free operation stations 6 are associated with each other and the identification symbol of the RTG crane 10 corresponding to each order. In addition, the identification symbol of the RTG crane 10 is indicated by a letter. As shown in fig. 4 (a), the order of the RTG crane 10 in the standby state is displayed to the 4 th position. In contrast, when an operation request is newly issued from the "G" RTG crane 10, the arithmetic unit 52 evaluates each condition of the "G" and determines that the priority order of the "G" is higher than that of the "F". In this case, as shown in fig. 4 (b), the arithmetic unit 52 inserts "G" into the 2 nd position, and lowers the order of the RTG crane 10 after "F" by one position. Thus, when the operation panel 6 becomes free, the arithmetic unit 52 associates the free operation panel 6 with the "a" RTG crane 10 at the 1 st position in the list. Then, when the next operation panel 6 becomes idle, the arithmetic unit 52 associates the idle operation panel 6 with the "G" RTG crane 10 at the 2 nd position in the list. The list shown in fig. 4 is a simple list showing only the order, but the state of each RTG crane may be described in the list.
The remote automatic RTG system control device 50 may be configured to forcibly associate the specific console 6 with the specific RTG crane 10, for example, when an abnormality occurs, regardless of the active operation request of the RTG crane 10.
Next, a process in which the remote automatic RTG system control apparatus 50 associates the free operation console 6 with the RTG crane 10 that transmitted the operation request will be described with reference to flowcharts shown in fig. 5 and 6. Fig. 5 is a flowchart showing the processing contents in the remote automatic RTG system control apparatus 50 in the case where an operation request is issued from a certain RTG crane 10 to the remote automatic RTG system control apparatus 50. First, the computing unit 52 acquires an operation request through the communication unit 51 (step S10). Next, the arithmetic unit 52 determines whether the console 6 is idle (step S20). At this time, if it is determined that there is an empty console 6, the arithmetic unit 52 associates the RTG crane 10 having transmitted the operation request with the empty console 6 (step S40). On the other hand, if it is determined that there is no free console 6, the arithmetic unit 52 creates a sequential waiting list that associates the free console 6 with the RTG crane 10 that transmitted the operation request, or edits the list (when the list has been created) (step S30). Thus, the arithmetic unit 52 can adjust the establishment of the association with the RTG crane 10 according to the idle state of the console 6. When step S30 or step S40 ends, the process is repeated again from step S10 at the time when the next operation request is transmitted.
Fig. 6 is a flowchart showing the processing contents in the remote automatic RTG system control apparatus 50 in the case where information that a certain console 6 is idle is transmitted to the remote automatic RTG system control apparatus 50. First, the computing unit 52 acquires information indicating the status of the idle operation of the console 6 via the communication unit 51 (step S110). Next, the arithmetic unit 52 determines whether or not the RTG crane 10 is standing by (step S120). At this time, if it is determined that there is no RTG crane 10 waiting, the arithmetic unit 52 causes the console 6 to wait for an operation request (step S140). On the other hand, if it is determined that the RTG crane 10 is standing by, the arithmetic unit 52 reads the order waiting list and establishes an association according to the order waiting list (step S130). When step S130 or step S140 ends, the process is repeated again from step S110 at the time when the information indicating that the next console 6 is idle is transmitted.
Next, the remote automatic RTG system 100, the control method of the remote automatic RTG system, and the operational effects of the remote automatic RTG system control device 50 according to this embodiment will be described.
In the remote automatic RTG system 100 according to this embodiment, the remote automatic RTG system control device 50 associates an operation console 6 (idle operation console) that is not associated with any RTG crane 10 among the plurality of operation consoles 6 with an RTG crane 10 (operation request RTG crane) among the plurality of RTG cranes 10 that has transmitted an operation request requesting an operation by an operator. At this time, the remote automatic RTG system control device 50 includes an arithmetic unit 52, and the arithmetic unit 52 adjusts the order of association between the RTG crane that transmitted the operation request and the free console 6 according to predetermined conditions. Thus, in the case where the operation table 6 is idle, the remote automatic RTG system control apparatus 50 can quickly associate the idle operation table 6 with the RTG crane 10 that transmitted the operation request. On the other hand, in the case where the operation panel 6 is not idle and there is the RTG crane 10 in standby, the remote automatic RTG system control device 50 can appropriately adjust how to associate the RTG crane 10 when the operation panel 6 becomes idle next, as the case may be. That is, the RTG crane 10 and the free operation table 6 can be associated with each other at an appropriate timing according to circumstances without preparing too many operation tables 6 for the number of RTG cranes 10. Thereby, the number of the operation tables 6 can be reduced with respect to the number of the RTG cranes 10.
The remote automatic RTG system control device 50 may associate the idle operation stations 6 according to the order of the operation requests. In this case, the remote automatic RTG system control device 50 can preferentially associate an RTG having a longer standby time with the idle operation table 6.
The remote automatic RTG system control device 50 can associate the idle operation stations 6 according to the urgency sequence of the operation request. In this case, the remote automatic RTG system control apparatus 50 can preferentially associate the RTG crane 10 having a high degree of emergency with the idle operation table 6.
The remote automatic RTG system control device 50 can associate the free operation table 6 according to the type of loading and unloading of the RTG crane 10 that transmitted the operation request. In this case, the remote automatic RTG system control apparatus 50 can preferentially associate the RTG crane 10 related to the loading and unloading of the category having the high priority with the free operation console.
The remote automatic RTG system control apparatus 50 can associate the free operation table 6 according to the work area of the RTG crane 10 that transmitted the operation request. In this case, the remote automatic RTG system control apparatus 50 can preferentially associate the RTG crane 10 associated with the work area of high priority with the free operation table 6.
The remote automatic RTG system control apparatus 50 can associate the free operation stations 6 according to the priority order of the containers in which the RTG crane 10 having transmitted the operation request performs the work. In this case, the remote automatic RTG system control apparatus 50 can preferentially associate the RTG crane 10 that works on the container with the higher priority level with the free operation table 6.
For the order of establishing association with the idle operation table 6 obtained according to the order of the operation requests, the remote automatic RTG system control device 50 may correct the order according to other conditions. In this case, the remote automatic RTG system control apparatus 50 may adjust the order in which the association with the idle operation table 6 is established according to the order of the operation requests while taking other conditions into consideration.
The remote automatic RTG system control apparatus 50 can create a sequential waiting list that associates the free operation stations 6 with the RTG crane 10 that sent the operation request, and associate the free operation stations 6 in the order on the list. In this case, by referring to the order waiting list, it is possible to easily grasp which RTG crane 10 is associated with which free console 6. By creating a list of the RTG cranes 10 in which the standby state is taken into consideration in this way, the standby state that matches the situation of each RTG crane 10 can be accurately grasped, and therefore, even if the number of operating stations 6 is reduced, the system operation can be accurately performed.
The operation request may include information indicating the condition of the RTG crane 10 to be the object. Thereby, the remote automatic RTG system control device 50 can adjust the association establishment with the idle operation table 6 in consideration of the condition of the RTG crane 10 related to the operation request.
The remote automatic RTG system 100 in the control method of the remote automatic RTG system 100 according to this embodiment includes: a plurality of RTG cranes 10; and a plurality of operation tables 6 capable of operating the RTG crane 10, wherein in the control method, the order in which the operation tables 6 of the plurality of operation tables 6 that are not associated with any RTG crane 10 are associated with the RTG crane 10 of the plurality of RTG cranes 10 that has transmitted an operation request requesting an operator to operate is adjusted according to a prescribed condition.
The remote automatic RTG system control device 50 according to the present embodiment controls the remote automatic RTG system 100, and the remote automatic RTG system 100 includes: a plurality of RTG cranes 10; and a plurality of operation tables 6 capable of operating the RTG crane 10, wherein the remote automatic RTG system control device 50 adjusts, according to a predetermined condition, an order in which the operation tables 6 of the plurality of operation tables 6, which are not associated with any RTG crane 10, are associated with the RTG crane 10 of the plurality of RTG cranes 10, which has transmitted an operation request requesting an operator to operate.
According to the control method of the remote automatic RTG system 100 and the remote automatic RTG system control device 50 according to the present embodiment, the same operations and effects as those of the remote automatic RTG system 100 can be obtained.
The present invention is not limited to the above embodiments.
For example, in the above embodiment, the manner of associating the RTG with the idle operation table 6 has been described, but the operation table 6 is not limited to the idle operation table, and even in the case where there is no idle operation table 6, a request for releasing the operation table 6 having been associated may be issued according to the degree of urgency or the like, and after the release, the association may be established with the RTG having a high degree of urgency.
In the above embodiment, the remote automatic RTG system control device 50 provided at a position different from the operation table 6 and the RTG crane 10 adjusts the association between the RTG crane 10 and the operation table 6, but the operation table 6 and the crane control device 20 may function as a part of the remote automatic RTG system control device.
Symbol description
6-operation table, 10-RTG crane, 50-remote automatic RTG system control device (control portion), 100-remote automatic RTG system.
Claims (11)
1. A remote automatic RTG system, comprising:
a plurality of RTG cranes;
a plurality of operation tables with which an operator can remotely operate the RTG crane; and
a control section that associates an idle operation station of the plurality of operation stations, which is not associated with any RTG crane, with an operation request RTG crane of the plurality of RTG cranes, which has transmitted an operation request requesting an operation by an operator, the remote automatic RTG system being characterized in that,
the control unit has an arithmetic unit that adjusts the order in which the operation request RTG crane and the idle operation panel are associated with each other according to a predetermined condition.
2. The remote automatic RTG system of claim 1, wherein the remote automatic RTG system is configured to automatically control the RTG system,
the operation part establishes association with the idle operation platform according to the sequence of the operation requests.
3. A remote automatic RTG system according to claim 1 or 2, characterized in that,
the operation unit associates the idle operation stations according to the urgency sequence of the operation request.
4. A remote automatic RTG system according to claim 1 to 3,
the operation unit associates the free operation base with the operation request RTG crane according to the type of loading and unloading of the RTG crane.
5. The remote automatic RTG system according to any one of claims 1 to 4, wherein,
the operation unit associates the free operation table with the operation area of the operation request RTG crane.
6. The remote automatic RTG system according to any one of claims 1 to 5, wherein,
the operation unit associates the free operation stations according to the priority order of the containers for which the operation request RTG crane is to perform the operation.
7. The remote automatic RTG system according to any one of claims 2 to 6, characterized in that,
the operation unit corrects the order of the idle operation stations obtained according to the order of the operation requests according to other conditions.
8. The remote automatic RTG system according to any one of claims 1 to 7, characterized in that,
the operation unit creates a sequential waiting list for associating the free operation console with the operation request RTG crane, and associates the free operation console in the order on the list.
9. The remote automatic RTG system according to any one of claims 1 to 8, characterized in that,
the operation request includes information indicating a condition of the operation request RTG crane to be an object.
10. A control method of a remote automatic RTG system, wherein the remote automatic RTG system includes:
a plurality of RTG cranes; and
a plurality of operating tables capable of operating the RTG crane, the control method characterized in that,
an order in which an idle operation station of the plurality of operation stations, which is not associated with any RTG crane, is associated with an operation request RTG crane of the plurality of RTG cranes, which has transmitted an operation request requesting an operator operation, is adjusted according to a prescribed condition.
11. A remote automatic RTG system control apparatus that controls a remote automatic RTG system, the remote automatic RTG system comprising:
a plurality of RTG cranes; and
a plurality of operating tables capable of operating the RTG crane, the remote automatic RTG system control device characterized in that,
an order in which an idle operation station of the plurality of operation stations, which is not associated with any RTG crane, is associated with an operation request RTG crane of the plurality of RTG cranes, which has transmitted an operation request requesting an operator operation, is adjusted according to a prescribed condition.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020163615 | 2020-09-29 | ||
| JP2020-163615 | 2020-09-29 | ||
| PCT/JP2021/022189 WO2022070520A1 (en) | 2020-09-29 | 2021-06-10 | Remote automated rtg system, method for controlling remote automated rtg system, and remote automated rtg system control device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN116234766A true CN116234766A (en) | 2023-06-06 |
Family
ID=80949825
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202180053260.3A Pending CN116234766A (en) | 2020-09-29 | 2021-06-10 | Remote automatic RTG system, control method of remote automatic RTG system and control device of remote automatic RTG system |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JPWO2022070520A1 (en) |
| CN (1) | CN116234766A (en) |
| WO (1) | WO2022070520A1 (en) |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007091394A (en) * | 2005-09-28 | 2007-04-12 | Mitsubishi Heavy Ind Ltd | Device, system and method for remotely guiding container conveying vehicle |
| JP2012041132A (en) * | 2010-08-19 | 2012-03-01 | Mitsubishi Heavy Ind Ltd | Operation panel for remote control system |
| JP6650386B2 (en) * | 2016-11-09 | 2020-02-19 | 本田技研工業株式会社 | Remote driving control device, vehicle control system, remote driving control method, and remote driving control program |
-
2021
- 2021-06-10 WO PCT/JP2021/022189 patent/WO2022070520A1/en active Application Filing
- 2021-06-10 CN CN202180053260.3A patent/CN116234766A/en active Pending
- 2021-06-10 JP JP2022553462A patent/JPWO2022070520A1/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022070520A1 (en) | 2022-04-07 |
| JPWO2022070520A1 (en) | 2022-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102444184B1 (en) | Container handling equipment controller arrangement | |
| JP5815820B2 (en) | Exchange automatic detection system and method for load suspending means of load transfer machine, and transfer machine | |
| JP6283753B2 (en) | Transport vehicle and transport system | |
| EP2835234A1 (en) | Robot system and robot control device | |
| WO2023024561A1 (en) | Shelf shifting deviation correction method and apparatus, automated guided vehicle, and storage medium | |
| CN111302200A (en) | Hoisting device, and hoisting device control method and device | |
| CN116234766A (en) | Remote automatic RTG system, control method of remote automatic RTG system and control device of remote automatic RTG system | |
| EP3939917B1 (en) | Communication system for unmanned conveyance vehicle | |
| JP7170625B2 (en) | Communication arrangements and communication methods for container handling equipment | |
| CN114237213B (en) | Automatic driving system for port vehicle | |
| CN111766882B (en) | Container detection method suitable for AGV and automatic wharf management system | |
| CN115243993A (en) | Remote operation system and remote operation method | |
| WO2022190454A1 (en) | In-warehouse management system | |
| JP6284212B1 (en) | Handling work allocation system and method | |
| JP2000255714A (en) | Article managing system | |
| JP3599165B2 (en) | Article storage facility | |
| WO2023127323A1 (en) | Crane and crane measurement system | |
| JP4817227B2 (en) | Entry / exit system | |
| JPH10279297A (en) | Automatic forklift | |
| WO2021210443A1 (en) | Automatic rtg system, control device, and container transport route setting method | |
| JPH02291400A (en) | Operation control system of unmanned fork lift | |
| JP6831170B1 (en) | forklift | |
| JP3435987B2 (en) | Automatic warehouse | |
| CN212502977U (en) | Automatic loading system | |
| US20240045436A1 (en) | Transport apparatus, transport system, and control method for transport apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| REG | Reference to a national code |
Ref country code: HK Ref legal event code: DE Ref document number: 40085528 Country of ref document: HK |