CN115571543A - Automatic stacking device for logistics - Google Patents
Automatic stacking device for logistics Download PDFInfo
- Publication number
- CN115571543A CN115571543A CN202211442294.4A CN202211442294A CN115571543A CN 115571543 A CN115571543 A CN 115571543A CN 202211442294 A CN202211442294 A CN 202211442294A CN 115571543 A CN115571543 A CN 115571543A
- Authority
- CN
- China
- Prior art keywords
- goods
- motor
- pile
- neatly
- conductive piece
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G37/00—Combinations of mechanical conveyors of the same kind, or of different kinds, of interest apart from their application in particular machines or use in particular manufacturing processes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G43/00—Control devices, e.g. for safety, warning or fault-correcting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G43/00—Control devices, e.g. for safety, warning or fault-correcting
- B65G43/08—Control devices operated by article or material being fed, conveyed or discharged
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/52—Devices for transferring articles or materials between conveyors i.e. discharging or feeding devices
- B65G47/68—Devices for transferring articles or materials between conveyors i.e. discharging or feeding devices adapted to receive articles arriving in one layer from one conveyor lane and to transfer them in individual layers to more than one conveyor lane or to one broader conveyor lane, or vice versa, e.g. combining the flows of articles conveyed by more than one conveyor
- B65G47/71—Devices for transferring articles or materials between conveyors i.e. discharging or feeding devices adapted to receive articles arriving in one layer from one conveyor lane and to transfer them in individual layers to more than one conveyor lane or to one broader conveyor lane, or vice versa, e.g. combining the flows of articles conveyed by more than one conveyor the articles being discharged or distributed to several distinct separate conveyors or to a broader conveyor lane
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/84—Star-shaped wheels or devices having endless travelling belts or chains, the wheels or devices being equipped with article-engaging elements
- B65G47/841—Devices having endless travelling belts or chains equipped with article-engaging elements
- B65G47/842—Devices having endless travelling belts or chains equipped with article-engaging elements the article-engaging elements being grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G57/00—Stacking of articles
- B65G57/02—Stacking of articles by adding to the top of the stack
- B65G57/03—Stacking of articles by adding to the top of the stack from above
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Warehouses Or Storage Devices (AREA)
Abstract
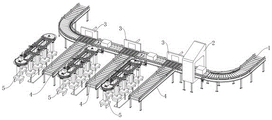
The invention relates to the technical field of logistics stacking, and discloses an automatic stacking device for logistics, which comprises a roller way conveying belt for conveying goods, a scanner arranged on the roller way conveying belt and used for acquiring goods data, a plurality of goods caching conveying belts connected to the roller way conveying belt, a goods picking mechanism and a plurality of circulating stacking mechanisms matched with the goods caching conveying belts, wherein the goods caching conveying belts are arranged on the roller way conveying belt; this automatic pile up neatly device for commodity circulation adopts circulating pile up neatly mechanism to carry out the continuation pile up neatly with categorised goods, can be the continuation treat that the pile up neatly goods carries out incessant pile up neatly, has reduced pile up neatly mechanism centre gripping goods and has removed and return the time that the removal process of treating centre gripping goods department consumes again behind appointed pile up neatly position, has shortened the dead time that the pile up neatly process consumed greatly, pile up neatly precision and pile up neatly efficiency have been improved to can carry out the clamping-force adjustment of adaptability according to the goods of centre gripping, be applicable to the goods of different materials.
Description
Technical Field
The invention belongs to the field of logistics stacking equipment, and particularly relates to an automatic stacking device for logistics.
Background
In the logistics industry, the belt is often used as a transmission tool in material conveying, materials are conveyed to a designated position from a warehouse and stacked by a stacker crane, the material running speed is greatly increased, and the problem of low efficiency of traditional manual carrying is solved.
Most of the current common stacking machines adopt a multi-axis robot hand, a mobile robot or a large three-dimensional moving platform to stack goods to a specified position, however, when the goods are stacked by adopting the robot hand, the mobile robot or combining the three-dimensional moving platform, the goods are firstly grabbed, the robot hand, the mobile robot or the three-dimensional moving platform returns to the position where the goods are to be grabbed again after moving to the specified stacking position to grab the goods, the efficiency is low, the stacking time interval is long, the stacking continuity is poor, and the clamping force of structural members such as clamping jaws on the goods cannot be conveniently adjusted when the goods are grabbed.
Disclosure of Invention
The invention aims to solve the problems and provide the automatic stacking device for logistics, which is simple in structure and reasonable in design.
The invention realizes the purpose through the following technical scheme:
an automatic stacking device for logistics comprises a roller way conveying belt for conveying goods, a scanner arranged on the roller way conveying belt and used for acquiring goods data, a plurality of goods caching conveying belts connected to the roller way conveying belt, a goods picking mechanism and a plurality of circulating stacking mechanisms matched with the goods caching conveying belts, wherein the goods picking mechanism is used for pushing the goods from the roller way conveying belt to the corresponding goods caching conveying belts;
circulating pile up neatly mechanism includes supporting component, connects the endless track on the supporting component, connects at the outside power supply mechanism of endless track, locates power module and chain belt on the support piece, a plurality of electric lift mechanism of sliding connection on the endless track and connect the goods of connecting at the electric lift mechanism lower extreme and grab the mechanism, power module is used for driving the chain belt circulation and rotates, a plurality of electric lift mechanism all is connected with the chain belt, and electric lift mechanism, goods grab and grab the mechanism and all be connected with power supply mechanism electricity.
As a further optimization scheme of the invention, the picking mechanism comprises an air cylinder connected to the roller way conveying belt and a goods pushing plate connected to the output end of the air cylinder, and the air cylinder and the goods caching conveying belt are arranged correspondingly.
As a further optimization scheme of the invention, the supporting assembly comprises a base arranged on one side of the cargo cache conveying belt, a plurality of vertical supporting frames connected to the base and a transverse connecting support connected to the upper end of each vertical supporting frame, and the annular track is connected with the transverse connecting support.
As a further optimized scheme of the present invention, the electric lifting mechanism includes a first square hollow tube disposed below the annular rail, a second square hollow tube slidably disposed in the first square hollow tube, a partition plate connected to an inner wall of the first square hollow tube, a first motor connected to an upper end of the partition plate, a first screw connected to an output shaft end of the first motor, a slider fixedly connected to an inner wall of the second square hollow tube, and a plurality of rail wheels movably connected to an upper end of the first square hollow tube, the plurality of rail wheels are slidably connected to the annular rail, a lower end of the second square hollow tube extends to an outside of the first square hollow tube and is connected to the cargo holding mechanism, and one end of the first screw penetrates through the second square hollow tube and is in threaded connection with the slider.
As a further optimized scheme of the invention, the cargo gripping mechanism comprises a frame connected to the lower end of the second square hollow tube, a clamping groove and an inner chamber which are arranged on the frame, a linear driving assembly arranged in the clamping groove, two clamping plates connected to the linear driving assembly, a second motor connected to the inner wall of the inner chamber, and a clamping force adjusting mechanism arranged between the output end of the second motor and the linear driving assembly, wherein the second motor is connected with the linear driving assembly through the clamping force adjusting mechanism, the linear driving assembly is used for driving the two clamping plates to move oppositely, and the clamping force adjusting mechanism is used for adjusting the pressure applied to the clamping plates by the linear driving assembly.
As a further optimization scheme of the invention, the linear driving assembly comprises a limit slide rod and a third screw rod which are connected to the inner wall of the clamping groove, a second screw rod which is connected to one end of the third screw rod, a sleeve which is connected to one end of the second screw rod, and a first damping ring which is connected to the inner wall of the sleeve, wherein one end of the second screw rod extends into the inner cavity, the thread directions of the second screw rod and the third screw rod are opposite, a first screw hole and a second screw hole which are matched with the second screw rod and the third screw rod are respectively arranged on the two clamping plates, and the two clamping plates are both connected with the limit slide rod in a sliding manner.
As a further optimization scheme of the invention, the clamping force adjusting mechanism comprises a third motor connected to the inner wall of the inner chamber, a screw rod connected to the output shaft end of the third motor, an adjusting plate in threaded connection with the screw rod, a pressing ring body movably connected to the lower end of the adjusting plate, a spring connected to one end of the pressing ring body, an arc-shaped limiting block connected to one end of the spring, and a second damping ring connected to one end of the arc-shaped limiting block, wherein the second damping ring is in contact with the first damping ring, the output shaft end of the second motor is connected with a rotating shaft, the rotating shaft sequentially penetrates through the pressing ring body, the spring, the arc-shaped limiting block, the second damping ring and the first damping ring, and a clamping block matched with the arc-shaped limiting block is connected to the rotating shaft.
As a further optimized scheme of the present invention, the power supply mechanism includes an annular circular tube disposed outside the annular track, a plurality of limiting frames connected to the annular track for limiting the annular circular tube, a first conductive piece and a second conductive piece symmetrically disposed inside the limiting annular circular tube, an insulating ring disposed between the first conductive piece and the second conductive piece, a third conductive piece and a fourth conductive piece symmetrically connected to the insulating ring, a flexible wiring pipe connected to the insulating ring, a connecting block connected to the first square hollow tube, and a circuit controller connected to the connecting block, the circuit controller is connected to the flexible wiring pipe, moving grooves for moving the flexible wiring pipe are disposed on the limiting frames and the annular circular tube, the first conductive piece contacts the third conductive piece, the second conductive piece contacts the fourth conductive piece, a first wire hole and a second wire hole are disposed in the insulating ring and the flexible wiring pipe, a first wire connected to the third wire is disposed in the first wire hole, a second wire connected to the fourth wire is disposed in the second wire hole, the first wire and the second wire are electrically connected to the circuit controller, the first wire and the second conductive piece are electrically connected to the power supply, and the second motor are electrically connected to the motor.
As a further optimization scheme of the invention, the power module comprises a fourth motor and a driven shaft which are connected to the transverse connecting support, and a chain wheel which is connected to the output shaft end and the driven shaft end of the fourth motor, wherein the chain belt is connected with the chain wheel.
The invention has the beneficial effects that: the invention adopts the circulating type stacking mechanism to continuously stack the classified goods, can continuously stack the goods to be stacked, reduces the time consumed in the moving process that the goods clamped by the stacking mechanism returns to the place where the goods to be clamped again after moving to the specified stacking position, greatly shortens the invalid time consumed in the stacking process, improves the stacking precision and the stacking efficiency, can carry out adaptive clamping force adjustment according to the clamped goods, and is suitable for goods of different materials.
Drawings
FIG. 1 is a schematic view of the overall structure of the present invention;
FIG. 2 is a schematic illustration of the endless palletizing mechanism according to the present invention;
FIG. 3 is an enlarged view taken at A of FIG. 2 in accordance with the present invention;
FIG. 4 is a schematic diagram of the power distribution mechanism of the present invention;
FIG. 5 is a cooperative view of the motorized lift mechanism and the cargo gripping mechanism of the present invention;
fig. 6 is an enlarged view of the invention at B in fig. 5.
In the figure: 1. a roller bed conveyer belt; 2. a scanner; 3. a goods picking mechanism; 4. a cargo buffer conveyor belt; 5. a circulating stacking mechanism; 51. a base; 52. a vertical support frame; 53. a transverse connecting bracket; 54. an annular track; 55. a chain belt; 56. an electric lifting mechanism; 561. a first square hollow tube; 562. a second square hollow tube; 563. a partition plate; 564. a first motor; 565. a first screw; 566. a slider; 567. a rail wheel; 57. a cargo gripping mechanism; 571. a frame; 572. a clamping groove; 573. a limiting slide bar; 574. an inner chamber; 575. a second motor; 576. a third motor; 577. a second screw; 578. a third screw; 579. a clamping plate; 5710. a sleeve; 5711. a first damping ring; 5712. a second damping ring; 5713. an arc-shaped limiting block; 5714. a rotating shaft; 5715. a clamping block; 5716. a spring; 5717. a pressure ring body; 5718. an adjusting plate; 58. a power supply mechanism; 581. a limiting frame; 582. an annular circular tube; 583. connecting blocks; 584. a circuit controller; 585. a flexible wiring pipe; 586. a first conductive member; 587. a second conductive member; 588. an insulating ring body; 589. a third conductive member; 5810. a fourth conductive member; 5811. a first wire hole; 5812. a second wire hole; 5813. a first electric wire; 5814. a second electric wire; 59. and a power module.
Detailed Description
The present application will now be described in further detail with reference to the drawings, and it should be noted that the following detailed description is given for purposes of illustration only and should not be construed as limiting the scope of the present application, as these numerous insubstantial modifications and variations can be made by those skilled in the art based on the teachings of the present application.
Example 1
As shown in fig. 1 and 2, an automatic stacking device for logistics includes a roller conveyor belt 1 for conveying goods, a scanner 2 disposed on the roller conveyor belt 1 for acquiring data of the goods, a plurality of goods buffer conveyor belts 4 connected to the roller conveyor belt 1, a goods picking mechanism 3, and a plurality of circulating stacking mechanisms 5 disposed in cooperation with the goods buffer conveyor belts 4, wherein the goods picking mechanism 3 is used for pushing the goods from the roller conveyor belt 1 to the corresponding goods buffer conveyor belts 4;
circulating pile up neatly mechanism 5 includes the supporting component, connect the endless track 54 on the supporting component, connect the power supply mechanism 58 outside the endless track 54, locate power module 59 and the chain belt 55 on the support piece, sliding connection is a plurality of electric lift mechanism 56 on endless track 54 and connect the goods of connecting at electric lift mechanism 56 lower extreme and grab mechanism 57, power module 59 is used for driving chain belt 55 circulation and rotates, a plurality of electric lift mechanism 56 all is connected with the chain belt 55, and electric lift mechanism 56, goods are grabbed mechanism 57 and all are connected with power supply mechanism 58 electricity.
Wherein, the supporting component includes the base 51 of locating goods buffer memory conveyer belt 4 one side, connects a plurality of vertical support frame 52 and the transverse connection support 53 of connecting in vertical support frame 52 upper end on base 51, and annular rail 54 is connected with transverse connection support 53.
The power module 59 includes a fourth motor and a driven shaft connected to the transverse connecting bracket 53 and a sprocket connected to an output shaft end of the fourth motor and a driven shaft end, and the chain belt 55 is connected to the sprocket.
It should be noted that, during automatic pile up neatly goods, the goods that will need the pile up neatly is arranged in on roller conveyor belt 1, and when the goods was carried to scanner 2 departments through roller conveyor belt 1, scanner 2 obtained the data information of corresponding goods through the two-dimensional code scanning to on the goods, if: the volume, weight, kind, etc. of the goods, or other detection methods are adopted, such as laser three-dimensional scanning, etc. to collect three-dimensional data of the goods, and data interaction is carried out with a control terminal in real time, the goods with data collected by the scanner 2 continuously move on the roller conveyor belt 1, when the goods pass through the goods picking mechanism 3, the goods picking mechanism 3 pushes the corresponding goods to the corresponding goods buffer conveyor belt 4 according to data classification of the goods, the classified goods gradually move to the lower part of the circulating type stacking mechanism 5 on the goods buffer conveyor belt 4, then the corresponding goods picking mechanism 57 is controlled by the electric lifting mechanism 56 in the circulating type stacking mechanism 5 to move downwards, the goods picking mechanism 57 clamps the goods after moving to the corresponding goods, the electric lifting mechanism 56 lifts the goods grabbing mechanism 57 loaded with the chain belt to the initial position again, then the fourth motor in the power module 59 drives the electric lifting mechanisms 56 connected with the goods after the goods grabbing mechanism 56 rotates, and the picking mechanism 57 rotate along the endless chain belt 54, at the moment, the first grabbing mechanism 57 moves to the next goods loaded with goods are continuously moved to the next position, the goods can be unloaded, and the goods can be continuously moved to the next goods clamping mechanism 57 in the process, and the process is continuously carried out, and the process of the goods such as the first goods to be unloaded, the goods can be continuously moved to be loaded on the pallet, and the next goods clamping mechanism is continuously moved to be repeatedly moved to be carried out, such as the dead time consumed by the stacker crane in moving it to and from the site of palletization and the goods to be palletized;
and the goods on the same goods buffer conveyer belt 4 may have differences in volume, cross-sectional area and weight, therefore, in the process of circulating stacking, the stacking can be performed according to the actual stacking order of the goods, for example, the goods gripped by the previous goods gripping mechanism 57 need to be stacked after the goods gripped by the next goods gripping mechanism 57, the previous goods gripping mechanism 57 is controlled to move through the stacking point and not stack the goods, the goods gripped by the next goods gripping mechanism 57 are stacked first, then the previous goods gripping mechanism 57 is controlled to move back to the stacking point to stack the gripped goods, and the preset stacking order can be performed on the premise of reducing the invalid time for moving the goods by the stacking mechanism.
As shown in fig. 1, the picking mechanism 3 includes an air cylinder connected to the roller conveyor belt 1 and a pushing plate connected to an output end of the air cylinder, and the air cylinder is arranged corresponding to the cargo buffer conveyor belt 4.
It should be noted that, as described above, when the picking mechanism 3 pushes different goods onto the corresponding goods buffer conveyer belt 4, the pushing plate is pushed by the cylinder to move toward the corresponding goods buffer conveyer belt 4, and the corresponding goods are pushed onto the goods buffer conveyer belt 4, at this time, the goods buffer conveyer belt 4 conveys the goods from one end thereof to the lower side of the goods grasping mechanism 57.
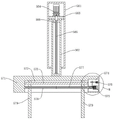
As shown in fig. 2, 3 and 5, the electric lifting mechanism 56 includes a first square hollow tube 561 disposed below the circular track 54, a second square hollow tube 562 slidably disposed in the first square hollow tube 561, a partition plate 563 connected to an inner wall of the first square hollow tube 561, a first motor 564 connected to an upper end of the partition plate 563, a first screw 565 connected to an output shaft end of the first motor 564, a slider 566 fixedly connected to an inner wall of the second square hollow tube 562, and a plurality of rail wheels 567 movably connected to an upper end of the first square hollow tube 561, wherein the plurality of rail wheels 567 are slidably connected to the circular track 54, a lower end of the second square hollow tube 562 extends to an outside of the first square hollow tube 561 and is connected to the cargo holding mechanism 57, and one end of the first screw 565 penetrates through the second square hollow tube 562 and is threadedly connected to the slider 566.
It should be noted that, when clamping goods, the first motor 564 in the electric lifting mechanism 56 drives the first screw 565 to rotate in the forward direction, after the first screw 565 rotates in the forward direction, the slide block 566 in the first square hollow tube 561 is driven to move downwards along the first screw 565 by a specified distance, so that the goods gripping mechanism 57 grips corresponding goods, after the goods are gripped by the goods gripping mechanism 57, the first motor 564 drives the first screw 565 to rotate in the reverse direction, after the first screw 565 rotates in the reverse direction, the slide block 566 in the first square hollow tube 561 is driven to move upwards along the first screw 565 to an initial position, then the chain belt 55 is driven to rotate by the power module 59, and the electric lifting mechanism 56 and the goods gripping mechanism 57 are driven to move along the chain belt 55, so that subsequent goods gripping mechanisms 57 grip goods in sequence, and this process is continuous, thereby greatly improving the efficiency of goods stacking.
As shown in fig. 2, 5 and 6, the cargo gripping mechanism 57 includes a frame 571 connected to the lower end of the second square hollow tube 562, a clamping groove 572 and an inner chamber 574 both provided on the frame 571, a linear driving assembly provided in the clamping groove 572, two clamping plates 579 connected to the linear driving assembly, a second motor 575 connected to the inner wall of the inner chamber 574, and a clamping force adjusting mechanism provided between the output end of the second motor 575 and the linear driving assembly, wherein the second motor 575 is connected to the linear driving assembly through the clamping force adjusting mechanism, the linear driving assembly is used for driving the two clamping plates 579 to move in opposite directions, and the clamping force adjusting mechanism is used for adjusting the pressure applied to the clamping plates 579 by the linear driving assembly.
The linear driving assembly comprises a limit slide rod 573 and a third screw 578 connected to the inner wall of the clamping groove 572, a second screw 577 connected to one end of the third screw 578, a sleeve 5710 connected to one end of the second screw 577 and a first damping ring 5711 connected to the inner wall of the sleeve 5710, one end of the second screw 577 extends into the inner cavity 574, the thread directions of the second screw 577 and the third screw 578 are opposite, a first screw hole and a second screw hole which are matched with the second screw 577 and the third screw 578 are respectively arranged on the two clamping plates 579, and the two clamping plates 579 are both connected with the limit slide rod 573 in a sliding manner.
The clamping force adjusting mechanism comprises a third motor 576 connected to the inner wall of the inner chamber 574, a screw rod connected to an output shaft end of the third motor 576, an adjusting plate 5718 in threaded connection with the screw rod, a pressure applying ring 5717 movably connected to the lower end of the adjusting plate 5718, a spring 5716 connected to one end of the pressure applying ring 5717, an arc stopper 5713 connected to one end of the spring 5716, and a second damping ring 5712 connected to one end of the arc stopper 5713, wherein the second damping ring 5712 is in contact with the first damping ring 5711, the output shaft end of the second motor 575 is connected with a rotating shaft 5714, the rotating shaft 5714 sequentially penetrates through the pressure applying ring 5717, the spring 5716, the arc stopper 5713, the second damping ring 5712 and the first damping ring 5711, and a clamping block 5715 matched with the arc stopper 5713 is connected to the rotating shaft 5714.
It should be noted that, as described above, when the cargo gripping mechanism 57 grips the cargo, after two of the clamping plates 579 move to both sides of the cargo, the second motor 575 drives the first damping ring 5711 and the sleeve 5710 to rotate through the clamping force adjusting mechanism, the sleeve 5710 drives the second screw 577 to rotate after rotating, the second screw 577 drives the third screw 578 to rotate in the same direction and at the same angle, because the thread directions of the second screw 577 and the third screw 578 are opposite, after rotating, the second screw 577 and the third screw 578 can drive the two clamping plates 579 to move to the cargo at the same time and grip the cargo, and when gripping the cargo, according to information data of the cargo, the pressure applied to the cargo by the two clamping plates 579 can be adaptively adjusted, as the pressure applied to the clamping plates 579 by the clamping plates 579 needs to grip and keep the cargo from being excessively squeezed, and then the torque applied to the second screw 577 and the third screw 578 by the clamping force adjusting mechanism is adjusted to adjust the torque applied to the second screw 577 and the third screw 578 to correspondingly adjust the clamping plates 579;
when the torque received by the second screw 577 is adjusted, the adjusting plate 5718 is driven to move through the third motor 576, when the adjusting plate 5718 moves towards the sleeve 5710, the adjusting plate 5718 drives the pressure applying ring 5717 movably connected with the adjusting plate 5718 to move in the same direction and at the same distance, at the moment, the spring 5716 is compressed, the elastic force of the spring 5716 is increased, the elastic force generated by the spring 5716 can be accurately adjusted by controlling the deformation distance of the controller due to the fact that the elastic force of the spring 5716 is a determined value, after the elastic force of the spring 5716 is increased, the pressure received by the arc-shaped limiting block 5713 and the second damping ring 5712 connected with the spring is increased, at the moment, the torque generated between the first damping ring 5711 and the second damping ring 5712 is increased, when the adjusting process occurs when the clamping plate 579 contacts with goods and does not displace any more, the rotation of the second screw 577 is blocked due to the reverse torque, at the moment, the reverse torque is larger than the output torque received by the screw, the output torque and the torque generated between the first damping ring 5711 and the second damping ring 5712, so that the clamping force can be applied to the clamping plate 579 conveniently adjusted by the clamping force.
As shown in fig. 2, 3 and 4, the power supply mechanism 58 includes an annular circular tube 582 disposed outside the annular track 54, a plurality of limiting frames 581 connected to the annular track 54 for limiting the annular circular tube 582, a first conductor 586 and a second conductor 587 symmetrically disposed in the limiting annular circular tube 582, an insulating ring 588 disposed between the first conductor 586 and the second conductor 587, a third conductor 589 and a fourth conductor 5810 symmetrically connected to the insulating ring 588, a flexible wiring tube 585 connected to the insulating ring 588, a connection block 583 connected to the first square hollow tube 561, and a circuit controller 584 connected to the connection block 583, wherein the circuit controller 584 and the flexible wiring tube 585 are connected, the limiting frames 581 and the annular circular tube 582 are provided with moving slots for moving the flexible wiring tube 585, the first conductor 586 and the third conductor 589 are in contact, the second conductor 587 and the fourth conductor 5810 are in contact, the insulating ring 585 and the flexible wiring tube 585 are provided with a first wire hole 5811 and a second wire hole 5812, the first conductor 586 and the third conductor 589 are provided in contact, the second conductor 584 and the second conductor 584 are provided with a second conductor 589, the second conductor 584 and a second conductor 584 are provided in electrical connection with a second conductor 5813, the first conductor 5814 and a second conductor 584 are provided in electrical connection with a second conductor 584, the second conductor 5814 are provided in electrical connection with a second conductor 5814, and a motor for controlling electrical connection with a second electrical wire 584.
It should be noted that in order to keep the electrical devices of the electrical lifting mechanism 56 and the goods gripping mechanism 57 in an energized state during the circulating movement, a power supply mechanism 58 is provided for supplying power to the electrical devices during the circulating movement, in particular, when the electrical lifting mechanism 56 is circulating along the annular track 54, a connecting block 583 connected to the outside of the first hollow tube 561 follows the first hollow tube 561 and moves the circuit controller 584 and the flexible wiring tube 585 connected thereto in the same direction and at the same distance, the moving path is a moving groove formed in the annular circular tube 582 and the connecting frame, and the flexible wiring tube 585 moves so as to bring the insulating ring 588 connected thereto and the third conductor 589 and the fourth conductor 5810 on the insulating ring in the same direction and at the same distance, while the third conductor 589 and the fourth conductor 5810 are in contact with the first conductor 586 and the second conductor 587 which are energized all the same time during the movement, so that the circuit controller is always in an energized state in the circuit 584 and the circuit controller 584 is operated by the circuit controller 584, and the corresponding control elements are provided for the electrical devices 584 and the corresponding electric control mechanism is provided for the circuit controller 584 and the corresponding electric motor for the circuit board 584 and the corresponding electric motor for the corresponding control elements of the prior art.
In the description of the present invention, it is to be understood that the terms "first" and "second" are used for descriptive purposes only and are not to be construed as indicating or implying relative importance or implying any number of technical features indicated. Thus, a feature defined as "first" or "second" may explicitly or implicitly include one or more of that feature. In the description of the present invention, "a plurality" means two or more unless specifically defined otherwise.
In the present invention, unless otherwise expressly stated or limited, the terms "mounted," "connected," "secured," and the like are to be construed broadly and can, for example, be fixedly connected, detachably connected, or integrally formed; can be mechanically or electrically connected; they may be directly connected or indirectly connected through intervening media, or may be connected through the use of two elements or the interaction of two elements. The specific meanings of the above terms in the present invention can be understood according to specific situations by those of ordinary skill in the art.
In the present invention, unless otherwise expressly stated or limited, the first feature "on" or "under" the second feature may be directly contacting the first and second features or indirectly contacting the first and second features through an intermediate. Also, a first feature "on," "above," and "over" a second feature may be directly on or obliquely above the second feature, or simply mean that the first feature is at a higher level than the second feature. A first feature "under," "beneath," and "under" a second feature may be directly under or obliquely under the second feature, or may simply mean that the first feature is at a lesser elevation than the second feature.
Although embodiments of the present invention have been shown and described above, it is understood that the above embodiments are exemplary and should not be construed as limiting the present invention, and that variations, modifications, substitutions and alterations can be made to the above embodiments by those of ordinary skill in the art within the scope of the present invention.
The above examples are merely illustrative of several embodiments of the present invention, and the description thereof is more specific and detailed, but not to be construed as limiting the scope of the invention. It should be noted that, for a person skilled in the art, several variations and modifications can be made without departing from the inventive concept, which falls within the scope of the present invention.
Claims (9)
1. The utility model provides an automatic pile up neatly device for commodity circulation which characterized in that: the goods sorting device comprises a roller way conveying belt (1) for conveying goods, a scanner (2) arranged on the roller way conveying belt (1) and used for acquiring goods data, a plurality of goods cache conveying belts (4) connected to the roller way conveying belt (1), a goods sorting mechanism (3) and a plurality of circulating stacking mechanisms (5) matched with the goods cache conveying belts (4), wherein the goods sorting mechanism (3) is used for pushing goods from the roller way conveying belt (1) to the corresponding goods cache conveying belts (4);
circulating pile up neatly mechanism (5) include supporting component, connect annular track (54) on supporting component, connect power supply mechanism (58) outside annular track (54), locate power module (59) and chain belt (55) on support piece, a plurality of electric lift mechanism (56) of sliding connection on annular track (54) and connect goods grasping mechanism (57) at electric lift mechanism (56) lower extreme, power module (59) are used for driving chain belt (55) circulation and rotate, a plurality of electric lift mechanism (56) all are connected with chain belt (55), and electric lift mechanism (56), goods grasping mechanism (57) all are connected with power supply mechanism (58) electricity.
2. The automatic stacking device for logistics according to claim 1, characterized in that: the picking mechanism (3) comprises an air cylinder connected to the roller way conveying belt (1) and a pushing plate connected to the output end of the air cylinder, and the air cylinder and the goods caching conveying belt (4) are arranged correspondingly.
3. The automatic stacking device for logistics according to claim 1, characterized in that: the supporting component comprises a base (51) arranged on one side of the cargo cache conveying belt (4), a plurality of vertical supporting frames (52) connected to the base (51) and a transverse connecting support (53) connected to the upper end of the vertical supporting frames (52), and the annular track (54) is connected with the transverse connecting support (53).
4. The automatic stacking device for logistics according to claim 3, characterized in that: the electric lifting mechanism (56) comprises a first square hollow tube (561) arranged below the annular track (54), a second square hollow tube (562) arranged in the first square hollow tube (561) in a sliding mode, a partition plate (563) connected to the inner wall of the first square hollow tube (561), a first motor (564) connected to the upper end of the partition plate (563), a first screw (565) connected to the output shaft end of the first motor (564), a slider (566) fixedly connected to the inner wall of the second square hollow tube (562) and a plurality of rail wheels (567) movably connected to the upper end of the first square hollow tube (561), wherein the rail wheels (567) are connected to the annular track (54) in a sliding mode, the lower end of the second square hollow tube (562) extends to the outside of the first square hollow tube (561) and is connected with the cargo holding mechanism (57), and one end of the first screw (565) penetrates through the second square hollow tube (562) and is in threaded connection with the slider (566).
5. The automatic stacking device for logistics according to claim 4, characterized in that: the goods gripping mechanism (57) comprises a frame (571) connected to the lower end of the second square hollow tube (562), a clamping groove (572) and an inner chamber (574) arranged on the frame (571), a linear driving assembly arranged in the clamping groove (572), two clamping plates (579) connected to the linear driving assembly, a second motor (575) connected to the inner wall of the inner chamber (574), and a clamping force adjusting mechanism arranged between the output end of the second motor (575) and the linear driving assembly, wherein the second motor (575) is connected with the linear driving assembly through the clamping force adjusting mechanism, the linear driving assembly is used for driving the two clamping plates (579) to move oppositely, and the clamping force adjusting mechanism is used for adjusting the pressure applied to the clamping plates (579) by the linear driving assembly.
6. The automatic stacking device for logistics according to claim 5, characterized in that: the linear driving assembly comprises a limiting sliding rod (573) and a third screw rod (578) which are connected to the inner wall of a clamping groove (572), a second screw rod (577) which is connected to one end of the third screw rod (578), a sleeve (5710) which is connected to one end of the second screw rod (577) and a first damping ring (5711) which is connected to the inner wall of the sleeve (5710), wherein one end of the second screw rod (577) extends into an inner chamber (574), the thread directions of the second screw rod (577) and the third screw rod (578) are opposite, a first screw hole and a second screw hole which are matched with the second screw rod (577) and the third screw rod (578) are respectively arranged on two clamping plates (579), and the two clamping plates (579) are both in sliding connection with the limiting sliding rod (573).
7. The automatic stacking device for logistics according to claim 6, wherein: clamping-force adjustment mechanism is including connecting third motor (576) on interior chamber (574) inner wall, connecting the lead screw of third motor (576) output shaft end, threaded connection is at regulating plate (5718) on the lead screw, swing joint is at the ring body (5717) of exerting pressure of regulating plate (5718) lower extreme, connect spring (5716) of exerting pressure ring body (5717) one end, connect arc stopper (5713) of spring (5716) one end and connect second damping ring (5712) at arc stopper (5713) one end, second damping ring (5712) and first damping ring (5711) contact, the output shaft end of second motor (575) is connected with pivot (5714), pivot (5714) pass in proper order and exert pressure ring body (5717), spring (5716), arc stopper (5713), second damping ring (5712) and first damping ring (5711), and be connected with fixture block (5715) with arc stopper 5713) matched with on pivot (5714).
8. The automatic stacking device for logistics according to claim 7, wherein: the power supply mechanism (58) comprises an annular circular tube (582) arranged outside the annular track (54), a plurality of limiting frames (581) connected to the annular track (54) and used for limiting the annular circular tube (582), a first conductive piece (586) and a second conductive piece (587) symmetrically arranged in the limiting annular circular tube (582), an insulating ring body (588) arranged between the first conductive piece (586) and the second conductive piece (587), a third conductive piece (589) and a fourth conductive piece (5810) symmetrically connected to the insulating ring body (588), a flexible wiring pipe (585) connected to the insulating ring body (588), a connecting block (583) connected to the first square conductive piece (561) and a circuit controller (584) connected to the connecting block (583), the circuit controller (584) is connected with the flexible wiring pipe (585), moving grooves for moving the flexible wiring pipe (585) are arranged on the limiting frames (581) and the annular circular tube (582), a wire (586) and a third conductive piece (589) are in contact, a second conductive piece (587) and a fourth conductive piece (5810) are in contact with a first wiring hole (5811), and a second wiring pipe (585) and a second wiring hole (5811) are respectively arranged in contact with a second wiring hole (5811), a second wire (5814) connected with a fourth conductive piece (5810) is arranged in the second wire hole (5812), the first wire (5813) and the second wire (5814) are electrically connected with the circuit controller (584), the first conductive piece (586) and the second conductive piece (587) are connected with an external power supply, and the first motor (564), the second motor (575) and the third motor (576) are electrically connected with the circuit controller (584).
9. The automatic stacking device for logistics according to claim 3, characterized in that: the power module (59) comprises a fourth motor and a driven shaft which are connected to the transverse connecting support (53) and a chain wheel connected to the output shaft end and the driven shaft end of the fourth motor, and the chain belt (55) is connected with the chain wheel.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211442294.4A CN115571543B (en) | 2022-11-18 | 2022-11-18 | Automatic stacking device for logistics |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211442294.4A CN115571543B (en) | 2022-11-18 | 2022-11-18 | Automatic stacking device for logistics |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115571543A true CN115571543A (en) | 2023-01-06 |
| CN115571543B CN115571543B (en) | 2023-03-07 |
Family
ID=84589448
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211442294.4A Active CN115571543B (en) | 2022-11-18 | 2022-11-18 | Automatic stacking device for logistics |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115571543B (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117228199A (en) * | 2023-11-02 | 2023-12-15 | 广州市鸿泰医药有限公司 | Intelligent goods picking and conveying equipment for medical warehouse and working method of intelligent goods picking and conveying equipment |
| CN118515043A (en) * | 2024-07-24 | 2024-08-20 | 山东港口科技集团潍坊有限公司 | Full-automatic intelligent stacker control system for wharf |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109675815A (en) * | 2018-12-22 | 2019-04-26 | 北京百利威仓储物流有限公司 | A kind of logistics automatic sorting apparatus |
| CN209337610U (en) * | 2018-10-09 | 2019-09-03 | 上海工程技术大学 | A kind of automation grabbing device |
| CN111169986A (en) * | 2020-02-03 | 2020-05-19 | 章军伟 | Multi-angle clamping and transporting device for power equipment maintenance |
| CN112604976A (en) * | 2020-12-04 | 2021-04-06 | 覃刚 | Storage letter sorting is with parcel letter sorting equipment that has sign indicating number heap structure |
| CN216965456U (en) * | 2022-03-23 | 2022-07-15 | 哈工大机器人(合肥)国际创新研究院 | Sorting device is carried to panel |
| CN114798453A (en) * | 2022-04-25 | 2022-07-29 | 武汉理工大学 | Full-automatic intelligent storage logistics transport trolley |
| CN217646942U (en) * | 2022-03-25 | 2022-10-25 | 上海火蓝科技有限公司 | Automatic logistics sorting equipment |
| CN217920450U (en) * | 2022-07-15 | 2022-11-29 | 无锡裕煌机械制造有限公司 | Highway waveform guardrail plate stacker crane |
-
2022
- 2022-11-18 CN CN202211442294.4A patent/CN115571543B/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN209337610U (en) * | 2018-10-09 | 2019-09-03 | 上海工程技术大学 | A kind of automation grabbing device |
| CN109675815A (en) * | 2018-12-22 | 2019-04-26 | 北京百利威仓储物流有限公司 | A kind of logistics automatic sorting apparatus |
| CN111169986A (en) * | 2020-02-03 | 2020-05-19 | 章军伟 | Multi-angle clamping and transporting device for power equipment maintenance |
| CN112604976A (en) * | 2020-12-04 | 2021-04-06 | 覃刚 | Storage letter sorting is with parcel letter sorting equipment that has sign indicating number heap structure |
| CN216965456U (en) * | 2022-03-23 | 2022-07-15 | 哈工大机器人(合肥)国际创新研究院 | Sorting device is carried to panel |
| CN217646942U (en) * | 2022-03-25 | 2022-10-25 | 上海火蓝科技有限公司 | Automatic logistics sorting equipment |
| CN114798453A (en) * | 2022-04-25 | 2022-07-29 | 武汉理工大学 | Full-automatic intelligent storage logistics transport trolley |
| CN217920450U (en) * | 2022-07-15 | 2022-11-29 | 无锡裕煌机械制造有限公司 | Highway waveform guardrail plate stacker crane |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117228199A (en) * | 2023-11-02 | 2023-12-15 | 广州市鸿泰医药有限公司 | Intelligent goods picking and conveying equipment for medical warehouse and working method of intelligent goods picking and conveying equipment |
| CN117228199B (en) * | 2023-11-02 | 2024-03-12 | 广州市鸿泰医药有限公司 | Intelligent goods picking and conveying equipment for medical warehouse and working method of intelligent goods picking and conveying equipment |
| CN118515043A (en) * | 2024-07-24 | 2024-08-20 | 山东港口科技集团潍坊有限公司 | Full-automatic intelligent stacker control system for wharf |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115571543B (en) | 2023-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115571543B (en) | Automatic stacking device for logistics | |
| CN107819134B (en) | New energy battery module assembly line | |
| CN211895110U (en) | Stack material taking equipment | |
| CN112678542B (en) | Chain-driven parallel distributed automatic unstacking robot with sucker grippers | |
| CN112209075A (en) | Material conveying mechanism for mounting | |
| CN211589196U (en) | Blanking device and fuel cell stack assembly system with same | |
| CN113998476A (en) | Logistics stacking equipment and stacking method thereof | |
| CN107953137B (en) | Intelligent work piece process equipment | |
| CN210837971U (en) | Stack pressing locking device and fuel cell stack assembly system with same | |
| CN106629089B (en) | Stacking system and implementation method thereof | |
| CN212122300U (en) | Nut installation device and fuel cell stack assembly system with same | |
| CN210762877U (en) | Feeding gantry manipulator clamp | |
| CN116352747A (en) | Automatic control grabbing device of industrial robot | |
| CN215297451U (en) | Circuit board boxing system and circuit board production line | |
| CN211643829U (en) | Loading device and fuel cell stack assembly system with same | |
| CN115781275A (en) | Automatically controlled cabinet intelligence assembly line | |
| CN213949815U (en) | Material conveying mechanism for mounting | |
| CN214394236U (en) | Intelligent transfer robot device for electric power room | |
| CN210557893U (en) | Stacking system for workpieces | |
| CN210854389U (en) | Stacking device | |
| CN211605299U (en) | Stack processing device and fuel cell stack assembly system with same | |
| CN220596353U (en) | Coiled wire stacking equipment | |
| CN218931031U (en) | Switch shell fragment feed mechanism | |
| CN221680103U (en) | Tray conveying system | |
| CN221894087U (en) | Packaging robot stacker crane gripper |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |