CN115535239A - 无人驾驶飞行器及将有效载荷固定到无人驾驶飞行器的方法 - Google Patents
无人驾驶飞行器及将有效载荷固定到无人驾驶飞行器的方法 Download PDFInfo
- Publication number
- CN115535239A CN115535239A CN202211252560.7A CN202211252560A CN115535239A CN 115535239 A CN115535239 A CN 115535239A CN 202211252560 A CN202211252560 A CN 202211252560A CN 115535239 A CN115535239 A CN 115535239A
- Authority
- CN
- China
- Prior art keywords
- payload
- uav
- tether
- control system
- coupling device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 330
- 230000008878 coupling Effects 0.000 claims abstract description 435
- 238000010168 coupling process Methods 0.000 claims abstract description 435
- 238000005859 coupling reaction Methods 0.000 claims abstract description 435
- 230000013011 mating Effects 0.000 claims description 12
- 230000010355 oscillation Effects 0.000 description 160
- 238000012384 transportation and delivery Methods 0.000 description 144
- 230000008569 process Effects 0.000 description 129
- 230000004044 response Effects 0.000 description 117
- 238000013016 damping Methods 0.000 description 113
- 230000033001 locomotion Effects 0.000 description 74
- 230000003993 interaction Effects 0.000 description 63
- 238000013507 mapping Methods 0.000 description 38
- 230000007246 mechanism Effects 0.000 description 27
- 238000012795 verification Methods 0.000 description 26
- 238000004891 communication Methods 0.000 description 19
- 238000010586 diagram Methods 0.000 description 19
- 230000008859 change Effects 0.000 description 18
- 230000005484 gravity Effects 0.000 description 15
- 239000002775 capsule Substances 0.000 description 14
- 230000006870 function Effects 0.000 description 13
- 230000006641 stabilisation Effects 0.000 description 13
- 238000011105 stabilization Methods 0.000 description 13
- 238000004804 winding Methods 0.000 description 12
- 230000001965 increasing effect Effects 0.000 description 10
- 230000000977 initiatory effect Effects 0.000 description 10
- 238000001514 detection method Methods 0.000 description 9
- 230000001174 ascending effect Effects 0.000 description 8
- 238000004458 analytical method Methods 0.000 description 7
- 238000013461 design Methods 0.000 description 7
- 230000007613 environmental effect Effects 0.000 description 7
- 230000000670 limiting effect Effects 0.000 description 7
- 239000000463 material Substances 0.000 description 7
- 239000003381 stabilizer Substances 0.000 description 7
- 230000008901 benefit Effects 0.000 description 6
- 238000013500 data storage Methods 0.000 description 6
- 230000007423 decrease Effects 0.000 description 6
- 239000000835 fiber Substances 0.000 description 6
- 238000003780 insertion Methods 0.000 description 6
- 230000037431 insertion Effects 0.000 description 6
- 230000021715 photosynthesis, light harvesting Effects 0.000 description 6
- 230000009467 reduction Effects 0.000 description 6
- 230000002829 reductive effect Effects 0.000 description 6
- 238000013459 approach Methods 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000003247 decreasing effect Effects 0.000 description 5
- 238000005259 measurement Methods 0.000 description 5
- 238000012544 monitoring process Methods 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 238000005086 pumping Methods 0.000 description 5
- 238000000926 separation method Methods 0.000 description 5
- 239000007787 solid Substances 0.000 description 5
- 238000003860 storage Methods 0.000 description 5
- 238000012360 testing method Methods 0.000 description 5
- 230000007704 transition Effects 0.000 description 5
- 230000002441 reversible effect Effects 0.000 description 4
- 230000001413 cellular effect Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 229920003023 plastic Polymers 0.000 description 3
- 230000000246 remedial effect Effects 0.000 description 3
- 230000001154 acute effect Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000000981 bystander Effects 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 229920002457 flexible plastic Polymers 0.000 description 2
- 230000010006 flight Effects 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000003534 oscillatory effect Effects 0.000 description 2
- 239000000123 paper Substances 0.000 description 2
- 230000000284 resting effect Effects 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000013475 authorization Methods 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000036461 convulsion Effects 0.000 description 1
- 238000013506 data mapping Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 238000002592 echocardiography Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 230000002401 inhibitory effect Effects 0.000 description 1
- 239000002650 laminated plastic Substances 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000003032 molecular docking Methods 0.000 description 1
- 230000037023 motor activity Effects 0.000 description 1
- 238000013439 planning Methods 0.000 description 1
- 230000002028 premature Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 238000009738 saturating Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 230000001953 sensory effect Effects 0.000 description 1
- 230000011664 signaling Effects 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000010200 validation analysis Methods 0.000 description 1
Images








































































Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/083—Shipping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D1/00—Dropping, ejecting, releasing, or receiving articles, liquids, or the like, in flight
- B64D1/02—Dropping, ejecting, or releasing articles
- B64D1/08—Dropping, ejecting, or releasing articles the articles being load-carrying devices
- B64D1/12—Releasing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
- B64C39/024—Aircraft not otherwise provided for characterised by special use of the remote controlled vehicle type, i.e. RPV
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D1/00—Dropping, ejecting, releasing, or receiving articles, liquids, or the like, in flight
- B64D1/22—Taking-up articles from earth's surface
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D17/00—Parachutes
- B64D17/22—Load suspension
- B64D17/38—Releasable fastening devices between parachute and load or pack
- B64D17/383—Cargo release hooks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/60—UAVs specially adapted for particular uses or applications for transporting passengers; for transporting goods other than weapons
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/60—UAVs specially adapted for particular uses or applications for transporting passengers; for transporting goods other than weapons
- B64U2101/67—UAVs specially adapted for particular uses or applications for transporting passengers; for transporting goods other than weapons the UAVs comprising tethers for lowering the goods
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Aviation & Aerospace Engineering (AREA)
- Economics (AREA)
- Strategic Management (AREA)
- General Business, Economics & Management (AREA)
- Human Resources & Organizations (AREA)
- Marketing (AREA)
- Operations Research (AREA)
- Quality & Reliability (AREA)
- Development Economics (AREA)
- Tourism & Hospitality (AREA)
- Physics & Mathematics (AREA)
- Entrepreneurship & Innovation (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Toys (AREA)
- Catching Or Destruction (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Radio Relay Systems (AREA)
Abstract
提供了一种无人驾驶飞行器系统,包括:具有机身的无人驾驶飞行器(UAV);系绳,其具有固定到位于UAV中的绞盘系统的第一端和固定到有效载荷联接装置的第二端;有效载荷联接装置插座,其位于UAV的机身中;具有手柄的有效载荷,其中有效载荷的手柄位于有效载荷联接装置中的槽内。还提供了一种将有效载荷固定到UAV的方法。
Description
本申请是2017年6月29日提交的PCT国际申请PCT/US2017/040035进入中国国家阶段的中国发明专利申请(申请号:201780065609.9、发明名称:无人驾驶飞行器及用于将有效载荷沿期望定向固定到UAV的技术)的分案申请。
技术领域
本公开涉及一种无人驾驶飞行器及将有效载荷固定到无人驾驶飞行器的方法。
背景技术
无人驾驶飞行器(也可称为自主飞行器)是能够在没有物理存在的人类操作员的情况下行驶的飞行器。无人驾驶飞行器可以以远程控制模式、自主模式或部分自主模式操作。
当无人驾驶飞行器以远程控制模式操作时,位于远程位置的飞行员或驾驶员可以通过经由无线链路发送到无人驾驶飞行器的命令来控制无人驾驶飞行器。当无人驾驶飞行器以自主模式操作时,无人驾驶飞行器通常基于预编程的导航航点、动态自动化系统或这些的组合来移动。此外,一些无人驾驶飞行器可以在远程控制模式和自主模式下操作,并且在一些情况下可以同时这样做。例如,作为示例,远程飞行员或驾驶员可能希望在手动执行另一任务(比如操作用于拾取物体的机械系统)的同时将导航留给自主系统。
存在用于各种不同环境的各种类型的无人驾驶飞行器。例如,存在用于在空中、地面、水下和空间中操作的无人驾驶飞行器。示例包括四旋翼直升机和立式起落UAV等。也存在对于可以进行多环境操作的混合操作的无人驾驶飞行器。混合无人驾驶飞行器的示例包括能够在陆地以及水上操作的两栖飞行器或者能够着陆在水上以及陆地上的水上飞机。其他示例也是可能的。
发明内容
本实施例有利地包括独特的有效载荷联接装置。在一实施例中,有效载荷联接装置包括从有效载荷联接装置的外表面向有效载荷联接装置的中心向下延伸的槽。该槽适于接收有效载荷的手柄,并在有效载荷的递送或收回期间支撑有效载荷。一旦有效载荷到达地面,有效载荷联接装置继续向下移动,直到有效载荷的手柄自动地与有效载荷联接装置的槽分离。槽下方的下唇的外表面被底切,使得其延伸小于槽上方的有效载荷联接装置的上端的外表面,以防止有效载荷联接装置在有效载荷联接装置收回至UAV期间与有效载荷的手柄重新接合,或捕捉电力线或树枝。有效载荷联接装置有利地是固态设计,没有移动部件,提供了将有效载荷递送到地面的不太复杂和更可靠的方式。
在一方面,提供了一种有效载荷联接装置,包括壳体,其中壳体适于附接到系绳的第一端,槽,其从壳体的外表面朝向壳体的中心向下延伸,从而在槽下方的壳体上形成下唇;并且其中槽适于接收有效载荷的手柄。
在另一方面,提供了一种有效载荷联接装置,包括壳体,壳体的底部上的系绳附接点,槽,其在壳体的第一内表面和壳体上的一对垂直向上延伸的指状物之间垂直延伸,其中槽适于接收有效载荷的手柄,在这对垂直指状物之间形成的开口,以及位于壳体的第一内表面上的系绳槽。
在又一方面,提供了一种从无人驾驶飞行器(UAV)递送有效载荷的方法,包括以下步骤:(i)提供系绳,其具有固定到位于UAV中的绞盘系统的第一端和固定到有效载荷联接装置的第二端;(ii)将有效载荷的手柄定位在有效载荷联接装置中的槽内;(iii)操作绞盘系统以降低有效载荷联接装置和有效载荷,直到有效载荷接合地面;以及(iv)进一步操作绞盘系统以降低有效载荷联接装置,直到有效载荷的手柄与有效载荷联接装置的槽分离。
通过适当地参考附图阅读以下详细描述,这些以及其他方面、优点和替代方案对于本领域普通技术人员将变得显而易见。此外,应该理解,在该发明内容部分和本文件的其他地方提供的描述旨在通过示例而非限制的方式说明所要求保护的主题。
附图说明
图1A是根据示例实施例的无人驾驶飞行器的简化图示。
图1B是根据示例实施例的无人驾驶飞行器的简化图示。
图1C是根据示例实施例的无人驾驶飞行器的简化图示。
图1D是根据示例实施例的无人驾驶飞行器的简化图示。
图1E是根据示例实施例的无人驾驶飞行器的简化图示。
图2是示出根据示例实施例的无人驾驶飞行器的部件的简化框图。
图3是示出根据示例实施例的UAV系统的简化框图。
图4A、4B和4C示出了根据示例实施例的有效载荷递送装置。
图5A示出了根据示例实施例的包括有效载荷510的有效载荷递送装置500的透视图。
图5B是图5A中所示的有效载荷递送装置500和有效载荷510的横截面侧视图。
图5C是图5A和5B中所示的有效载荷递送装置500和有效载荷510的侧视图。
图6A是根据示例实施例的有效载荷联接装置800的透视图。
图6B是图6A中所示的有效载荷联接装置800的侧视图。
图6C是图6A和6B中所示的有效载荷联接装置800的前视图。
图7是图6A-6C中所示的有效载荷联接装置800在插入位于UAV机身中的有效载荷联接装置插座之前的透视图。
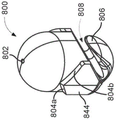
图8是图6A-6C中所示的有效载荷联接装置800在插入位于UAV机身中的有效载荷联接装置插座之前的另一透视图。
图9示出了位于UAV机身中的凹陷约束槽和有效载荷联接装置插座的透视图。
图10A示出了随着在触地递送之前有效载荷510向下移动时的有效载荷递送装置500的侧视图,其中有效载荷510的手柄511固定在有效载荷联接装置800内。
图10B示出了在有效载荷510落在地面上之后有效载荷递送装置500的侧视图,示出了有效载荷联接装置800与有效载荷510的手柄511分离。
图10C示出了有效载荷递送装置500的侧视图,其中有效载荷联接装置800移动远离有效载荷510的手柄511。
图11是有效载荷510的手柄511的侧视图。
图12示出了一对锁定销570、572,其延伸穿过有效载荷510的手柄511中的孔514和516,以将手柄511和有效载荷510的顶部固定在UAV的机身内。
图13A是在使有效载荷的手柄位于有效载荷联接装置900的槽920内之前的有效载荷联接装置900的透视图。
图13B是有效载荷联接装置900在递送有效载荷并从有效载荷的手柄分离之后的透视图。
图14A是根据示例实施例的图13A和13B中所示的有效载荷联接装置900的前透视图。
图14B是图14A中所示的有效载荷联接装置900的后透视图。
图14C是图14A和14B中所示的有效载荷联接装置900的侧视图。
图14D是图14A-14C中所示的有效载荷联接装置900的前视图。
图14E是图14A-D中所示的有效载荷联接装置900的俯视图。
图15A是根据示例实施例的有效载荷联接装置1000的透视图。
图15B是图15A中所示的有效载荷联接装置1000的另一透视图。
图15C是图15A和15B中所示的有效载荷联接装置1000的侧视图。
图15D是图15A-C中所示的有效载荷联接装置1000的俯视图。
图15E是图15A-D中所示的有效载荷联接装置1000的横截面侧视图。
图16A是根据示例实施例的有效载荷联接装置800'的侧视图,其中槽808位于唇806'上方。
图16B是在有效载荷联接装置800'与有效载荷的手柄分离之后在槽808已经闭合之后的有效载荷联接装置800'的侧视图。
图16C是图16A中所示的有效载荷联接装置800'的横截面侧视图。
图16D是图16B中所示的有效载荷联接装置800'的横截面侧视图。
图17是根据示例实施例的用于执行有效载荷的系拴拾取以便随后递送到目标位置的方法的流程图。
图18是根据示例实施例的用于执行有效载荷的系拴递送的方法的流程图。
图19是根据示例实施例的用于促进对系绳的控制以便与用户交互和/或向用户提供反馈的示例流程图。
图20示出了根据示例实施例的电动机电流水平随时间的变化。
图21示出了根据示例实施例的检测到的电流尖峰,其指示与系绳的特定用户交互。
图22示出了根据示例实施例的基于特定用户交互的电动机响应。
图23示出了根据示例实施例的用于调整系绳的张力的电动机响应过程。
图24示出了根据示例实施例的用于提供制动感觉的电动机响应过程。
图25示出了根据示例实施例的随后是UAV响应过程的电动机响应过程。
图26是根据示例实施例的用于确定有效载荷是否已从UAV的系绳分离的方法的流程图。
图27是根据示例实施例的用于启动阻尼例程以抑制有效载荷联接装置的振荡的示例流程图。
图28A至28D共同示出了根据示例实施例的系绳缩回过程期间的阻尼例程的启动。
图29是根据示例实施例的用于启动向前飞行以抑制有效载荷的振荡的示例流程图。
图30A至30D共同示出了根据示例实施例的使用向前飞行以抑制有效载荷的振荡。
图31是根据示例实施例的用于减小飞行稳定程度以抑制有效载荷的振荡的示例流程图。
图32A至32H共同示出了根据示例实施例的使用减小飞行稳定程度以抑制有效载荷的振荡。
图33是根据示例实施例的用于选择一个或多个阻尼例程以帮助抑制有效载荷的振荡的示例流程图。
图34是根据示例实施例的用于从UAV分离系绳的方法的流程图。
图35是根据示例实施例的用于在将有效载荷降低到地面时检测和解决系绳上的向下力的方法的流程图。
图36是根据示例实施例的用于在将有效载荷朝向UAV绞卷(winch)时检测和解决系绳上的向下力的方法的流程图。
图37是根据示例实施例的用于检测UAV是否已成功拾取有效载荷的方法的流程图。
图38A示出了根据示例实施例的执行有效载荷拾取和递送过程的UAV的状态图的一部分。
图38B示出了根据示例实施例的执行有效载荷拾取和递送过程的UAV的状态图的另一部分。
图38C示出了根据示例实施例的执行有效载荷拾取和递送过程的UAV的状态图的另一部分。
具体实施方式
这里描述了示例性的方法和系统。应该理解的是,在此使用词语“示例性”来表示“用作示例、实例或说明”。本文描述为“示例性”或“说明性”的任何实施方式或特征不一定被解释为优选或优于其他实施方式或特征。在附图中,除非上下文另外指出,否则相似的符号通常指代相似的部件。这里描述的示例实施方式不意味着是限制性的。将容易理解的是,如本文一般性描述的以及在附图中示出的本公开的各方面可以以各种各样的不同配置进行布置、替换、组合、分离和设计,所有这些在本文中都是预期的。
I.概述
本实施例涉及用于携带待递送或收回的有效载荷的无人驾驶飞行器(UAV)或无人驾驶航空系统(UAS)(在本文中统称为UAV)的使用。作为示例,UAV可用于向个人或企业递送或从个人或企业收回有效载荷。在操作中,待递送的有效载荷被固定到UAV,然后UAV飞期满望的递送站点。一旦UAV到达递送站点,UAV可着陆以递送有效载荷,或者以悬停模式操作并且使用系绳和与UAV定位的绞盘机构将有效载荷从UAV朝向递送站点降低。在有效载荷触地时,有效载荷联接装置(有时称为胶囊)自动与有效载荷分离。另外,通过将有效载荷的手柄定位到有效载荷联接装置中的槽中,可以在UAV以悬停模式操作的同时收回有效载荷。
为了递送有效载荷,UAV可包括各种机构以在运输期间固定有效载荷并在递送时释放有效载荷。示例实施例可以采用用于将有效载荷被动地联接到UAV以便在递送时运输和释放有效载荷的装置的形式或者涉及该装置。
这种有效载荷联接装置可包括通过系绳联接到UAV的壳体,该系绳可缠绕和展开以相对于UAV升高和降低壳体。壳体可包括一个或多个摆臂,其适于从壳体以锐角延伸,形成有效载荷可附接在其上的钩。当壳体和附接的有效载荷从UAV降低(例如通过展开系绳)到UAV下方的运输位置(例如地面)时,有效载荷可以从钩上脱离。
例如,一旦有效载荷到达地面,UAV可以通过继续解开系绳来过延伸(over-run)系绳。当有效载荷在地面上保持静止时,有效载荷联接装置可以继续降低,并且壳体上的重力和/或惯性力可以使摆臂钩从有效载荷分离。在从有效载荷分离时,摆臂可以适于缩回到壳体中,并且有效载荷联接装置可以向UAV上升(例如通过缩回系绳),将有效载荷留在地面上。当有效载荷联接装置接近UAV时,适于接收壳体的装置可以接合摆臂的凸轮,使得摆臂以锐角从壳体延伸,从而形成用于固定另一有效载荷的钩,以便通过UAV递送。
更具体地,本实施例有利地包括独特的有效载荷联接装置。在一实施例中,有效载荷联接装置包括从有效载荷联接装置的外表面向有效载荷联接装置的中心向下延伸的槽。该槽适于接收有效载荷的手柄,并在有效载荷的递送或收回期间支撑有效载荷。一旦有效载荷到达地面,有效载荷联接装置继续向下移动,直到有效载荷的手柄与有效载荷联接装置的槽分离。槽下方的下唇的外表面被底切,使得其在槽上方延伸小于有效载荷联接装置的上端的外表面,以防止有效载荷联接装置在有效载荷联接装置收回到无人机期间与有效载荷的手柄重新接合,或捕捉电力线或树枝。
有效载荷联接装置可包括位于其外表面的相对侧上的凸轮。当有效载荷联接装置被绞回到UAV时,有效载荷联接装置的凸轮适于与UAV的机身内的相应凸轮接合,使得当凸轮接合时,有效载荷联接装置能够旋转以将有效载荷联接装置定向在UAV机身内的期望位置。
在这方面,有效载荷可以具有纵向延伸的顶部,使得当有效载荷联接装置的外表面上的凸轮接合UAV机身内的配合凸轮时,该纵向延伸的顶部旋转到UAV机身底部中的相应纵向延伸的凹陷约束槽内的期望位置。在其他实施例中,有效载荷可被简单地拉入成抵靠着UAV机身底部紧密定位。在这种情况下,当有效载荷联接装置的凸轮与机身内的配合凸轮接合时,有效载荷的顶部不需要具有纵向延伸的顶部,该顶部变得定位在机身的腔内。然而,在使用凸轮的情况下,有效载荷联接装置的凸轮和机身中的有效载荷联接插座内的配合凸轮可以适当地旋转有效载荷联接装置,以将有效载荷定向在相对于机身的期望位置。
有效载荷联接装置的显著优点在于有效载荷联接装置不包括移动部件,从而降低了其复杂性并降低了当有效载荷联接装置中包括移动部件时存在的部件故障的可能性。
有效载荷可以有利地包括手柄,该手柄非常适合于定位在有效载荷联接装置的槽内。手柄可以由薄的柔性塑料材料构成,该材料具有高度的柔性,允许容易地插入有效载荷联接机构的槽中,并且还易于在有效载荷着陆时与有效载荷联接机构的槽分离。当手柄弯曲以匹配有效载荷联接装置中的槽的角度时,希望手柄柔性允许有效载荷和有效载荷联接装置垂直直立悬挂。更加坚固的手柄使得有效载荷联接装置在包裹着陆时更容易与手柄分离,尽管手柄太柔软,有效载荷联接装置可以翻转而不会释放。此外,希望在分离时,手柄应弹回到垂直定向,这进一步减少了手柄与有效载荷联接装置的槽的重新钩住,并且当接合在UAV的机身内时将包裹拉紧到约束中。还应注意的是,手柄也可以是纸或其他天然纤维,有或没有塑料层压或塑料/玻璃/天然纤维以提供额外的强度。例如,还可以使用纤维增强纸。
手柄还可有利地包括一对孔,其适于接收定位在UAV内的锁定销。锁定销可以具有圆锥形状以便于插入手柄中的孔中并且将包裹拉动成在UAV机身中的凹陷约束槽内紧密接合。一旦有效载荷联接装置的凸轮与机身内的配合凸轮接合,手柄就定位在所需的方向上。伺服电动机或其他机构比如带有导螺杆的常规电动机或具有限位开关以控制行程的齿条和小齿轮(或诸如线性致动器的其他机构)可用于使锥形锁定销移动穿过手柄中的孔,以将手柄和有效载荷紧紧地保持在适当位置,当有效载荷固定在UAV下方时,允许UAV高速飞行。可替代地,一个或多个锁定销可以移动到有效载荷联接装置本身的凹部或开口内的位置,而不是移动到包裹手柄中的孔中,以将有效载荷联接装置和包裹固定到UAV。
有效载荷可以采用空气动力学手提袋的形式,尽管有效载荷可以具有任何数量的不同构造和几何形状。然而,在线性凹陷约束槽与机身定位的情况下,希望有效载荷的顶部具有大致线性的形状以配合在机身内的线性凹陷约束槽内。
有效载荷联接机构也可以具有不同的配置。例如,系绳可以附接到有效载荷联接装置的底部,并且定位在有效载荷联接装置中的垂直延伸的系绳槽内。垂直系绳槽延伸通过有效载荷联接装置,其适于接收有效载荷的手柄。在该位置,有效载荷的手柄在递送和收回期间定位在槽内。有效载荷联接装置还包括一对向上延伸的指状物,其位于槽周围,在该对指状物之间具有开口。
当有效载荷接触地面时,有效载荷联接装置继续向下移动并自动地与有效载荷的手柄分离。有效载荷联接装置可包括被加重的上半部,使得在从有效载荷的手柄分离时,有效载荷联接装置翻倒并旋转180度,使得该对向上延伸的指状物旋转180°并向下延伸。在该旋转期间,系绳变得脱离垂直系绳槽并且移动通过该对指状物之间的开口。结果,防止有效载荷联接与有效载荷的手柄重新接合,因为槽向下延伸。另外,在释放手柄之后向下延伸的槽还有助于防止有效载荷联接装置在绞回到UAV时与电源线或树枝接合,因为槽中的开口向下延伸。可替代地,有效载荷联接装置可以是底部加重的。
有效载荷联接装置的该实施例还可以包括在其外表面上的凸轮,其适于接合机身内的有效载荷联接装置插座内的配合凸轮,以将有效载荷联接装置定向在UAV机身内的期望位置。
在另一实施例中,垂直槽可以定位在有效载荷联接装置内,其适于接收有效载荷的手柄并在递送和收回期间支撑手柄和有效载荷。在该实施例中,系绳槽定位在有效载荷联接装置的外部,并且有效载荷联接装置的顶部被加重,使得当有效载荷到达地面时,有效载荷联接装置继续向下移动直到手柄与有效载荷联接装置的槽分离。一旦分离,加重的有效载荷联接机构旋转90度,使得在收回或捕捉电力线或树枝期间,槽不能与有效载荷的手柄重新接合。有效载荷联接机构的该实施例可以包括在其外表面上的凸轮,其适于接合UAV机身内的配合凸轮,以将有效载荷联接机构以及手柄和有效载荷定向在期望的位置。
此外,有效载荷递送系统在绞卷上升期间自动对齐包裹,使其沿着飞机纵向轴线的最小阻力定向。这种对齐可以在拾取后实现高速向前飞行。通过有效载荷钩和插座的形状实现对齐。钩(由于其形状也称为胶囊)具有围绕其周边的凸轮特征,当其接合到UAV机身的插座内的凸轮特征时,总是将其定向在限定的方向上。胶囊两侧的凸轮形状的尖端是不对称的,以防止在90度方向上卡住。在这方面,螺旋凸轮表面可以在有效载荷联接机构的一侧的顶点处相遇,并且螺旋凸轮表面可以在有效载荷联接机构的另一侧的圆顶点处相遇。钩专门设计成使得包裹悬挂在钩的中心线上,从而可以在90度的两个方向上对齐。
除了对齐功能之外,当包裹在递送时接触地面时,有效载荷钩还被动且自动地释放包裹。这是通过钩槽的形状和角度以及包裹上的相应手柄来实现的。当有效载荷由于胶囊的质量以及希望继续使胶囊向下移动通过包裹的惯性而触地时,钩很容易从手柄上滑下。钩的端部设计成从胶囊的主体略微凹陷,这防止钩意外地重新附接到手柄上。成功释放后,钩被绞回到飞机上。所有这些功能(在拾取期间的包裹对齐和在递送期间的被动释放)可以有利地在该钩实施例中没有任何移动部件的情况下实现(称为固态设计)。这大大提高了可靠性并降低了成本。简单的设计还使用户交互非常清晰和不言自明。另外,有效载荷联接装置可以是底部加重的,使得它保持在期望的垂直方向并且不倾斜。
用于绞卷上升/拾取操作的包裹可以是具有加强的卡扣式手柄(例如由塑料或诸如纤维的其他材料制成)的空气动力学形状的手提袋,但是也可以使用其他形状的有效载荷。有效载荷的手柄将有效载荷附接到有效载荷联接装置的钩,并且其槽或开口成形为允许可靠的被动释放。手柄还可包括两个用于锁定销的较小开口。手柄的加强有利于在对齐旋转期间将扭矩从胶囊传递到包裹中。包裹本身可以由卡片材料制成并具有内部撕开条。薄纤维带撕开条可以沿着一个包裹侧的周边延伸,并且使得顾客能够在递送之后容易地打开包裹。
当有效载荷被绞卷上升并且完成对齐时,使用胶囊在其插座中的额外垂直行程将有效载荷拉入UAV机身中的凹陷约束槽中。凹陷约束槽与有效载荷的上部的形状相匹配,并在巡航飞行期间使其稳定,防止任何多余的侧向或来回摇摆运动。凹陷约束槽也完全嵌入机身并且没有突出部分,从而允许在返回飞行时(在包裹递送之后)具有良好的空气动力学性能。
本实施例提供用于UAV的高度集成的基于绞盘的拾取和递送系统。可以提供许多显著的优点。例如,提供了在不需要着陆的情况下拾取和递送包裹的能力。该系统能够在飞机悬停时绞卷上升包裹。在某些应用中,商家或客户也可能不需要基础设施。其优势包括高任务灵活性以及有限或无基础设施安装成本的可能性以及有效载荷几何形状的更高灵活性。
II.说明性的无人驾驶飞行器
这里,术语“无人驾驶飞行器”和“UAV”是指能够在没有实际存在人类飞行员的情况下执行一些功能的任何自主或半自主飞行器。
UAV可以采取各种形式。例如,UAV可以采取的形式有固定翼飞机、滑翔机、立式起落飞机、喷气式飞机、导管式风扇飞机、轻于空气的飞船比如飞艇或可转向的气球、旋翼飞行器比如直升机或多旋翼飞机、和/或扑翼飞机等。此外,术语“无人驾驶飞机”、“无人驾驶飞行器系统”(UAVS)或“无人航空系统”(UAS)也可以用于指UAV。
图1A是根据示例实施例的提供UAV的各种视图的简化图示。特别地,图1A示出了固定翼UAV1100a的示例,其还可被称为飞机、飞行器、双翼飞机、滑翔机或飞机等。顾名思义,固定翼UAV1100a具有固定翼1102,其基于机翼形状和飞行器的前空速产生升力。例如,两个翼1102可以具有翼型形状的横截面以在UAV1100a上产生空气动力。
如图所示,固定翼UAV1100a可以包括机翼主体或机身1104。机翼主体1104可以包含例如控制电子设备,比如惯性测量单元(IMU)和/或电子速度控制器、电池、其他传感器和/或有效载荷等。说明性的UAV1100a还可以包括起落架(未示出)以辅助受控的起飞和着陆。在其他实施例中,其他类型的无起落架的UAV也是可能的。
UAV1100a还包括定位在机翼1106(或机身)上的推进单元1106,其可以各自包括用于推进UAV1100a的电动机、轴和螺旋桨。稳定器1108(或翼片)也可以附接到UAV1110a以在飞行期间稳定UAV的偏航(左转或右转)。在一些实施例中,UAV1100a也可以配置为充当滑翔机。为此,UAV1100a可以关闭其电动机、推进单元等,并滑行一段时间。在UAV1100a中,一对旋翼支撑件1110在机翼1106下方延伸,并且多个旋翼1112附接到旋翼支撑件1110。旋翼1112可以在悬停模式期间使用,其中UAV1110a正下降到递送位置,或者在递送之后上升。在示例UAV1100a中,稳定器1108示出为附接到旋翼支撑件1110。
在飞行期间,UAV1100a可以通过控制其俯仰、横滚、偏航和/或高度来控制其移动的方向和/或速度。例如,稳定器1108可以包括用于控制UAV的偏航的一个或多个方向舵1108a,并且机翼1102可以包括用于控制UAV的俯仰的一个或多个升降舵和/或用于控制UAV的横滚的一个或多个副翼1102a。作为另一示例,同时升高或降低所有螺旋桨的速度可导致UAV1100a分别增加或减小其高度。
类似地,图1B示出了固定翼UAV120的另一示例。固定翼UAV120包括机身122、具有翼型横截面的两个机翼124以为UAV120提供升力、垂直稳定器(或翼片)以稳定飞机的偏航(左转或右转)、水平稳定器128(也称为升降舵或水平尾翼)以稳定俯仰(向上或向下倾斜)、起落架130和推进单元132,其可以包括电动机、轴和螺旋桨。
图1C示出了具有推进器配置的螺旋桨的UAV140的示例。与推进单元安装在UAV的前部相反,术语“推动器”是指推进单元142安装在UAV的后部并且向前“推动”飞行器。类似于图1A和1B所提供的描述,图1C描绘了在推进器飞机中使用的常见结构,包括机身144、两个机翼146、垂直稳定器148和推进单元142,其可以包括电动机、轴和螺旋桨。
图1D示出了立式起落UAV160的示例。在所示示例中,立式起落UAV160具有固定机翼162,以提供升力并允许UAV160水平地滑行(例如沿着x轴,所处位置大致垂直于图1D所示的位置)。然而,固定机翼162还允许立式起落UAV160自行垂直地起飞和着陆。
例如,在发射场地,立式起落UAV160可垂直(如图所示)定位,其翼片164和/或机翼162搁置在地面上并使UAV160稳定在垂直位置。然后立式起落UAV160可以通过操作其螺旋桨166来产生向上的推力(例如大致沿y轴的推力)从而起飞。一旦处于合适的高度,立式起落UAV160可以使用其襟翼168将其自身重新定向在水平位置,使得其机身170比y轴更接近与x轴对齐。通过水平定位,螺旋桨166可以提供向前的推力,从而使立式起落UAV 160能够以与通常飞机类似的方式飞行。
图示的固定翼UAV上的许多变化是可能的。例如,固定翼UAV可以包括更多或更少的螺旋桨,和/或可以利用一个或多个管道风扇来推进。此外,具有更多机翼(例如具有四个机翼的“x翼”配置)、具有更少机翼或甚至没有机翼的UAV也是可能的。
如上所述,除了固定翼UAV之外或者可替代地,一些实施例还可能涉及其他类型的UAV。例如,图1E示出了通常被称为多旋翼飞行器180的旋翼机的示例。多旋翼飞行器180也可以被称为四旋翼飞行器,因为它包括四个旋翼182。应该理解,示例实施例可以涉及具有比多旋翼飞行器180更多或更少的旋翼的旋翼机。例如,直升机通常具有两个旋翼。具有三个或更多个旋翼的其他示例也是可能的。这里,术语“多旋翼飞行器”是指具有多于两个旋翼的任何旋翼机,术语“直升机”是指具有两个旋翼的旋翼机。
更详细地参考多旋翼飞行器180,四个旋翼182为多旋翼飞行器180提供推进和可操纵性。更具体地,每个旋翼182包括附接到电动机184的叶片。如此构造,旋翼182可以允许多旋翼飞行器180垂直起降,在任何方向上操纵,和/或悬停。此外,叶片的桨距可以作为一组和/或有区别地进行调整,并且可以允许多旋翼飞行器180控制其俯仰、横滚、偏航和/或高度。
应该理解的是,此处对“无人驾驶”飞行器或UAV的引用可同样适用于自主和半自主飞行器。在自主实施方式中,飞行器的所有功能都是自动的;例如经由实时计算机功能预编程或控制,所述实时计算机功能响应来自各种传感器的输入和/或预定信息。在半自主实施方式中,飞行器的一些功能可以由操作人员来控制,而其他功能则是自主执行的。此外,在一些实施例中,UAV可以配置为允许远程操作员接管否则可由UAV自主控制的功能。更进一步地,给定类型的功能可以在一个抽象级别被远程控制,并且在另一个抽象级别自主执行。例如,远程操作员可以控制UAV的高级导航决策,比如通过指定UAV应该从一个位置行进到另一个位置(例如从郊区仓库到附近城市的递送地址),而UAV的导航系统自主控制更精细的导航决策,比如两个地点之间的具体路线、实现路线的特定飞行控制,以及在沿路线航行时避开障碍物等。
更一般地,应该理解的是,这里描述的示例UAV并不意图是限制性的。示例实施例可以涉及任何类型的无人驾驶飞行器、在其中被实现或者采取这样的形式。
III.说明性的UAV部件
图2是示出根据示例实施例的UAV200的部件的简化框图。UAV200可以采取参考图1A-1E描述的UAV100、120、140、160和180中的一个的形式或者在形式上类似。然而,UAV200也可以采取其他形式。
UAV200可以包括各种类型的传感器,并且可以包括配置为提供在此描述的功能的计算系统。在图示的实施例中,UAV200的传感器包括惯性测量单元(IMU)202、超声波传感器204和GPS206以及其他可能的传感器和感测系统。
在所示的实施例中,UAV200还包括一个或多个处理器208。处理器208可以是通用处理器或专用处理器(例如数字信号处理器、专用集成电路等)。一个或多个处理器208可以配置为执行计算机可读程序指令212,其存储在数据存储器210中并且可执行以提供在此描述的UAV的功能。
数据存储装置210可包括或采取可以由至少一个处理器208读取或访问的一个或多个计算机可读存储介质的形式。一个或多个计算机可读存储介质可以包括易失性和/或非易失性存储部件,比如光学、磁性、有机或其他存储器或磁盘存储器,其可以整体地或部分地与一个或多个处理器208中的至少一个集成。在一些实施例中,数据存储器210可以通过使用单个物理设备(例如一个光学、磁性、有机或其他存储器或磁盘存储单元)来实现,而在其他实施例中,数据存储器210可以通过使用两个或更多个物理设备来实现。
如上所述,数据存储器210可以包括计算机可读程序指令212以及可能的附加数据,比如UAV200的诊断数据。这样,数据存储器210可以包括程序指令212,以执行或促进在此描述的一些或全部UAV功能。例如,在所示的实施例中,程序指令212包括导航模块214和系绳控制模块216。
A.传感器
在说明性实施例中,IMU202可以包括加速度计和陀螺仪,它们可以一起用于确定UAV200的定向。特别地,加速度计可以测量车辆相对于地球的定向,而陀螺仪测量围绕轴的旋转速率。IMU以低成本、低功耗封装在市场上销售。例如,IMU202可以采取微型微机电系统(MEMS)或者纳米机电系统(NEMS)的形式或包括它们。还可以使用其他类型的IMU。
除了加速计和陀螺仪之外,IMU202还可以包括其它传感器,这可以帮助更好地确定位置和/或有助于增加UAV200的自主性。这种传感器的两个示例是磁力计和压力传感器。在一些实施例中,UAV可以包括低功率数字3轴磁力计,其可用于实现用于精确航向信息的定向独立电子罗盘。然而,也可以使用其他类型的磁力计。其他示例也是可能的。此外,请注意,UAV可以包括上述惯性传感器中的一些或全部作为与IMU分离的部件。
UAV200还可以包括压力传感器或气压计,其可用于确定UAV200的高度。可替代地,还可以使用其他传感器比如音高计或雷达高度计来提供高度的指示,这可能有助于提高IMU的准确性和/或防止其漂移。
在另一方面,UAV200可以包括允许UAV感测环境中的物体的一个或多个传感器。例如,在图示的实施例中,UAV200包括超声波传感器204。超声波传感器204可以通过产生声波并确定波的传输和接收物体的相应回波之间的时间间隔来确定到物体的距离。超声波传感器用于无人驾驶飞行器或IMU的典型应用是低水平高度控制和避障。超声波传感器也可以用于需要悬停在一定高度或需要能够检测障碍物的飞行器。其他系统可以用于确定、感测附近物体(比如光检测和测距(LIDAR)系统、激光检测和测距(LADAR)系统、和/或红外或前视红外(FLIR)系统等)的存在和/或确定到附近物体的距离。
在一些实施例中,UAV200还可以包括一个或多个成像系统。例如,UAV200可以使用一个或多个静止摄影和/或摄像机来从UAV环境中捕捉图像数据。作为具体的示例,电荷联接器件(CCD)相机或互补金属氧化物半导体(CMOS)相机可以用于无人驾驶飞行器。这样的成像传感器具有许多可能的应用,比如避障、定位技术、用于更精确导航的地面跟踪(例如通过将光流技术应用于图像)、视频反馈和/或图像识别和处理等。
UAV200还可以包括GPS接收器206。GPS接收器206可以配置成提供典型的公知GPS系统的数据,比如UAV200的GPS坐标。UAV200可以利用这种GPS数据用于各种功能。因此,UAV可以使用其GPS接收器206来帮助导航到呼叫者的位置,如至少部分地由其移动设备所提供的GPS坐标所指示。其他示例也是可能的。
B.导航和位置确定
导航模块214可以提供允许UAV200例如围绕其环境移动并到达期望位置的功能。为此,导航模块214可通过控制影响飞行的UAV的机械特征(例如其方向舵、升降舵、副翼和/或其螺旋桨的速度)来控制飞行的高度和/或方向。
为了将UAV200导航到目标位置,导航模块214可以实现各种导航技术,例如基于地图的导航和基于定位的导航。利用基于地图的导航,UAV200可以设置有其环境的地图,然后可以使用该地图来导航到地图上的特定位置。利用基于定位的导航,UAV200能够通过使用定位而在未知的环境中导航。基于定位的导航可以涉及UAV200建立其自己的环境地图并计算其在地图内的位置和/或物体在环境中的位置。例如,随着UAV200在其整个环境中移动,UAV200可以连续地使用定位来更新其环境地图。该连续映射过程可被称为同时定位和映射(SLAM)。还可以使用其他导航技术。
在一些实施例中,导航模块214可以使用依赖于航点的技术进行导航。特别地,航点是一组识别物理空间中的点的坐标。例如,空中导航航点可以由某个纬度、经度和高度来限定。因此,导航模块214可以使UAV200在航点间移动,以便最终行进到最终目的地(例如航点序列中的最终航点)。
在另一方面,UAV200的导航模块214和/或其他部件和系统可以配置为“定位”以更精确地导航到目标位置的场景。更具体地,在某些情况下,可能需要UAV位于由UAV递送有效载荷228的目标位置的阈值距离内(例如在目标目的地的几英尺内)。为此,UAV可以使用双重方法,其中使用更一般的位置确定技术来导航到与目标位置相关的一般区域,然后使用更精确的位置确定技术来识别和/或导航到一般区域内的目标位置。
例如,UAV200可以通过使用航点和/或基于地图的导航来导航到有效载荷228正被递送的目标目的地的一般区域。然后,UAV可以切换到使用定位过程来定位并行进到更具体位置的模式。例如,如果UAV200将有效载荷递送到用户的家中,则UAV200可能需要基本上靠近目标位置,以便避免将有效载荷递送到不期望的区域(例如到屋顶上、泳池中、邻居家地盘等)。然而,迄今为止,GPS信号可能只能接到UAV200(例如在用户家中的区块内)。然后可以使用更精确的位置确定技术来找到特定的目标位置。
一旦UAV200已经导航到目标递送位置的一般区域,就可以使用各种类型的位置确定技术来实现目标递送位置的定位。例如,UAV200可以配备有一个或多个传感系统,例如超声波传感器204、红外传感器(未示出)和/或其他传感器,其可以提供导航模块214利用的输入来自主导航或半自主导航到特定的目标位置。
作为另一示例,一旦UAV200到达目标递送位置(或者诸如人员或其移动设备的移动对象)的一般区域,UAV200就可以切换到“电传操纵(fly-by-wire)”模式,其中至少部分地由远程操作员控制,其可以将UAV200导航到特定的目标位置。为此,可以将来自UAV200的传感数据发送给远程操作员以帮助他们将UAV200导航到特定位置。
作为另一示例,UAV200可以包括能够向路过者发信号以帮助到达特定目标递送位置的模块;例如,UAV200可以在图形显示器中显示请求这种帮助的可视消息,通过扬声器播放音频消息或音调以指示需要这种帮助等。这样的视觉或音频消息可能指示在将UAV200递送到特定的人或特定的位置时需要帮助,并且可以提供信息以帮助路过者将UAV200递送到人或位置(例如人或位置的描述或图片,和/或人或位置的名称)等。在UAV无法使用感测功能或其他位置确定技术来到达特定目标位置的情况下,这样的特征可能是有用的。然而,该特征并不局限于这种情况。
在一些实施例中,一旦UAV200到达目标递送位置的一般区域,UAV200就可利用来自用户的远程设备(例如用户的移动电话)的信标来定位该人。这样的信标可以采取各种形式。作为示例,考虑到远程设备(比如请求UAV递送的人的移动电话)能够发送定向信号(例如经由RF信号、光信号和/或音频信号)。在这种情况下,UAV200可以配置为通过“采购”这样的定向信号来导航—换句话说,通过确定信号最强的地方并相应地导航。作为另一示例,移动设备可以在人类范围内或在人类范围外发射频率,并且UAV200可以监听该频率并相应地导航。作为相关的示例,如果UAV200正在监听口头命令,则UAV200可以使用诸如“我在这里!”之类的口头陈述来寻求请求递送有效载荷的人员的具体位置。
在替代布置中,导航模块可以在与UAV200无线通信的远程计算设备实现。远程计算设备可以接收指示UAV200的操作状态的数据、来自UAV200的传感器数据(允许其评估UAV200正在经历的环境条件)和/或UAV200的位置信息。提供有这样的信息,远程计算设备可以确定UAV200应当进行的高度和/或方向调整和/或可以确定UAV200应如何调整其机械特征(例如其方向舵、升降舵、副翼和/或其螺旋桨的速度)以实现这种运动。远程计算系统然后可以将这样的调整传送给UAV200,使其能够以确定的方式移动。
C.通信系统
另一方面,UAV200包括一个或多个通信系统218。通信系统218可以包括一个或多个无线接口和/或一个或多个有线接口,其允许UAV200经由一个或多个网络进行通信。这样的无线接口可以在一个或多个无线通信协议下提供通信,比如蓝牙、WiFi(例如IEEE802.11协议)、长期演进(LTE)、WiMAX(例如IEEE 802.16标准)、射频ID(RFID)协议、近场通信(NFC)和/或其他无线通信协议。这样的有线接口可以包括以太网接口、通用串行总线(USB)接口或类似的接口,以经由导线、双绞线、同轴电缆、光链路、光纤链路或至有线网络的其他物理连接进行通信。
在一些实施例中,UAV200可以包括允许短程通信和远程通信的通信系统218。例如,UAV200可以配置用于使用蓝牙的短程通信和CDMA协议下的远程通信。在这样的实施例中,UAV200可以配置成用作“热点”,或者换句话说,作为远程支持设备与一个或多个数据网络(比如蜂窝网络和/或互联网)之间的网关或代理。如此配置,UAV200可以促进远程支持设备否则将不能自行执行的数据通信。
例如,UAV200可以提供到远程设备的WiFi连接,并且用作到UAV可能例如在LTE或3G协议下连接到的蜂窝服务提供商的数据网络的代理或网关。UAV200还可以充当到远程设备可能无法以其他方式访问的高空气球网络、卫星网络或这些网络的组合等的代理或网关。
D.电力系统
在另一方面,UAV200可以包括电力系统220。电力系统220可以包括用于向UAV200提供电力的一个或多个电池。在一示例中,一个或多个电池可以是可再充电的,并且每个电池可以经由电池和电源之间的有线连接和/或经由无线充电系统(比如将外部时变磁场施加到内部电池的感应充电系统)而再充电。
E.有效载荷递送
UAV200可采用各种系统和配置以便运输和递送有效载荷228。在一些实施方式中,给定的UAV200的有效载荷228可包括或采取被设计成将各种货物运输到目标递送地点的“包裹”的形式。例如,UAV200可以包括其中可以运输一个或多个物品的舱室。这样的包裹可以是一个或多个食品、购买物品、医疗物品或具有适于由UAV在两个位置之间运输的尺寸和重量的任何其他物体。在其他实施例中,有效载荷228可以简单地是正在被递送的一个或多个物品(例如没有容纳物品的任何包裹)。
在一些实施例中,有效载荷228可以附接到UAV并且在UAV的一些或全部飞行期间基本位于UAV的外部。例如,包裹可以在飞行到目标位置期间被系拴或以其他方式可释放地附接在UAV下面。在包裹在UAV下面运送物品的实施例中,包裹可以包括保护其内容物不受环境影响的各种特征,减少系统上的空气动力学阻力,并且防止在UAV飞行期间包裹的内容物移位。
例如,当有效载荷228采取用于运输物品的包裹的形式时,包裹可以包括由防水纸板、塑料或任何其他轻质且防水的材料构成的外壳。此外,为了减小阻力,包裹可具有带有尖锐前部的光滑表面,从而减小了正面横截面积。此外,包裹的侧面可以从宽的底部到窄的顶部逐渐变细,这允许包裹用作窄的吊挂,从而减少对UAV的机翼的干扰影响。这可能会使包裹的一些前部区域和体积远离UAV的机翼,从而防止包裹引起的机翼上的升力的降低。另外,在一些实施例中,包裹的外壳可以由单片材料构成,以便减少气隙或多余的材料,这两者都可以增加对系统的阻力。另外或可替代地,包裹可以包括用于抑制包裹抖动的稳定器。抖动的这种降低可能使得包裹与UAV的连接刚性较小,并且可能导致包裹的内容物在飞行期间移位较少。
为了递送有效载荷,UAV可以包括由系绳控制模块216控制的绞盘系统221,以便在UAV悬停在上面的同时将有效载荷228降低到地面。如图2所示,绞盘系统221可以包括系绳224,系绳224可以通过有效载荷联接装置226联接到有效载荷228。系绳224可以缠绕在联接到UAV的电动机222的线轴上。电动机222可以采用可由速度控制器主动控制的DC电动机(例如伺服电动机)的形式。系绳控制模块216可控制速度控制器以使电动机222旋转线轴,从而展开或缩回系绳224并降低或升高有效载荷联接装置226。实际上,速度控制器可以为线轴输出期望的运行速率(例如期望的RPM),其可以对应于系绳224和有效载荷228应当朝向地面降低的速度。电动机222然后可以旋转线轴,使其保持期望的运行速率。
为了经由速度控制器来控制电动机222,系绳控制模块216可以从配置为将机械位置转换为代表性模拟或数字信号的速度传感器(例如编码器)接收数据。特别地,速度传感器可以包括旋转编码器,其可以提供与电动机的轴或联接到电动机的线轴等的旋转位置(和/或旋转运动)有关的信息。此外,速度传感器可以采取绝对式编码器和/或增量式编码器等的形式。因此,在示例实施方式中,随着电动机222使线轴旋转,可以使用旋转编码器来测量该旋转。在此过程中,旋转编码器可用于将旋转位置转换为由系绳控制模块216使用的模拟或数字电子信号,以确定线轴从固定基准角度和/或至代表新旋转位置的模拟数字电子信号的旋转量等。其他示例也是可能的。
基于来自速度传感器的数据,系绳控制模块216可以确定电动机222和/或线轴的旋转速度,并响应性地控制电动机222(例如通过增加或减少提供给电动机222的电流),以使电动机222的旋转速度匹配期望的速度。当调整电动机电流时,电流调整的幅度可以基于使用电动机222的确定的和期望的速度的比例-积分-微分(PID)计算。例如,电流调整的幅度可以基于当前差值、过去差值(基于随时间的累积错误)以及线轴的确定的和期望的速度之间的未来差值(基于当前的变化率)。
在一些实施例中,系绳控制模块216可以改变系绳224和有效载荷228下降到地面的速率。例如,速度控制器可根据可变展开速率曲线和/或响应于其他因素来改变期望的运行速率,以便改变有效载荷228向地面下降的速率。为此,系绳控制模块216可以调整施加到系绳224的制动量或摩擦量。例如,为了改变系绳展开速率,UAV200可以包括摩擦垫,其可以将可变量的压力施加到系绳224。作为另一示例,UAV200可以包括机动的制动系统,其改变线轴放出系绳224的速率。这样的制动系统可以采取机电系统的形式,其中电动机222操作以减慢线轴放出系绳224的速率。另外,电动机222可以改变其调整线轴的速度(例如RPM)的量,并且因此可以改变系绳224的展开速率。其他示例也是可能的。
在一些实施例中,系绳控制模块216可以配置为将供应到电动机222的电动机电流限制到最大值。由于对电动机电流有这样的限制,可能存在电动机222不能在由速度控制器指定的期望操作下进行操作的情况。例如,如下面更详细地讨论,可能存在这样的情况,其中速度控制器指定了电动机222应当将系绳224朝向UAV200缩回的期望的运行速率,但是电动机电流可被限制为使得系绳224上的足够大的向下力将抵消电动机222的缩回力,并且反而使系绳224松开。如下面进一步讨论,取决于UAV200的操作状态,可以施加和/或改变对电动机电流的限制。
在一些实施例中,系绳控制模块216可以配置成基于供应到电动机222的电流量来确定系绳224和/或有效载荷228的状态。例如,如果向下力被施加到系绳224(例如如果有效载荷228附接到系绳224,或者如果系绳224在朝向UAV200缩回时被阻碍在物体上),系绳控制模块216可能需要增加电动机电流以便使电动机222和/或线轴的确定的旋转速度与期望的速度匹配。类似地,当向下力从系绳224移除时(例如在递送有效载荷228或移除系绳钩住(snag)时),系绳控制模块216可能需要减小电动机电流,以便使电动机222和/或线轴的确定的旋转速度与期望的速度匹配。因此,系绳控制模块216可以配置成监测提供给电动机222的电流。例如,系绳控制模块216可以基于从电动机的电流传感器或电力系统220的电流传感器接收的传感器数据来确定电动机电流。在任何情况下,基于提供给电动机222的电流,确定有效载荷228是否附接到系绳224,某人或某物是否正在拉动系绳224,和/或有效载荷联接装置226是否在缩回系绳224之后正压靠着UAV200。其它示例也是可能的。
在递送有效载荷228的过程中,有效载荷联接装置226可以配置为在由系绳224从UAV下降的同时固定有效载荷228,并且可以进一步配置为在到达地平面时释放有效载荷228。然后可以通过使用电动机222卷绕系绳224来将有效载荷联接装置226缩回到UAV。
在一些实施方式中,一旦将有效载荷228降低到地面,其就可被动释放。例如,被动释放机构可以包括适于缩回到壳体中并从壳体延伸的一个或多个摆臂。延伸的摆臂可以形成有效载荷228可以附接在其上的钩。当释放机构和有效载荷228通过系绳降低到地面上时,释放机构上的重力以及向下的惯性力可能导致有效载荷228从钩上脱离,从而允许释放机构朝着UAV向上升起。释放机构可以进一步包括弹簧机构,当摆臂上没有其他外力时,弹簧机构偏置摆臂以缩回到壳体中。例如,弹簧可以在摆臂上施加力,以将摆臂推向或拉向壳体,使得一旦有效载荷228的重量不再迫使摆臂从壳体延伸时摆臂就缩回到壳体中。在递送有效载荷228时,当将释放机构向UAV提升时,将摇臂缩回到壳体中可减少释放机构钩住(snag)有效载荷228或其他附近物体的可能性。
主动有效载荷释放机构也是可能的。例如,诸如基于气压的高度计和/或加速度计的传感器可以帮助检测释放机构(和有效载荷)相对于地面的位置。来自传感器的数据可以通过无线链路传送回UAV和/或控制系统,并用于帮助确定释放机构何时到达地平面(例如通过利用加速度计检测地面撞击特征的测量结果)。在其他示例中,UAV可基于检测系绳上的阈值低向下力的重量传感器和/或基于当降低有效载荷时由绞盘汲取的功率的阈值低测量值来确定有效载荷已到达地面。
除此之外或作为系拴递送系统的替代,用于递送有效载荷的其他系统和技术也是可能的。例如,UAV200可以包括气囊降落系统或降落伞降落系统。可替代地,携带有效载荷的UAV200可以简单地在递送位置降落在地面上。其他示例也是可能的。
IV.说明性的UAV部署系统
UAV系统可被实施以便提供各种UAV相关的服务。特别地,可以在可能与区域和/或中央控制系统进行通信的多个不同的发射站点处提供UAV。这样的分布式UAV系统可以允许UAV快速部署以跨越大的地理区域(例如远大于任何单个UAV的飞行范围)提供服务。例如,能够携带有效载荷的UAV可以分布在大地理区域(可能甚至遍及整个国家,甚至全世界)的多个发射站点,以便提供各种物品的按需运输到整个地理区域的位置。图3是示出根据示例实施例的分布式UAV系统300的简化框图。
在说明性的UAV系统300中,访问系统302可以允许与UAV304的网络交互、控制和/或使用。在一些实施例中,访问系统302可以是允许UAV304的人为控制的调度的计算系统。因此,控制系统可以包括或以其他方式提供用户界面,用户可以通过该用户界面访问和/或控制UAV304。
在一些实施例中,可以另外或替代地经由一个或多个自动化过程来完成UAV304的调度。例如,访问系统302可以调度UAV304中的一个以将有效载荷运输到目标位置,并且UAV可以通过利用各种机载传感器(比如GPS接收器和/或其他各种导航传感器)自主地导航到目标位置。
此外,访问系统302可以提供UAV的远程操作。例如,访问系统302可以允许操作员通过其用户界面来控制UAV的飞行。作为具体示例,操作员可以使用访问系统302来将UAV304调度到目标位置。然后,UAV304可以自主地导航到目标位置的一般区域。此时,操作员可以使用访问系统302来控制UAV304并且将UAV导航到目标位置(例如导航至有效载荷正被运输到的特定人员)。UAV的远程操作的其他示例也是可能的。
在说明性实施例中,UAV304可以采取各种形式。例如,每个UAV304可以是诸如图1A-1E所示的那些UAV。然而,在不脱离本发明的范围的情况下,UAV系统300也可以使用其他类型的UAV。在一些实施方式中,所有UAV304可以具有相同或相似的配置。然而,在其他实施方式中,UAV304可以包括多个不同类型的UAV。例如,UAV304可以包括多种类型的UAV,每种类型的UAV配置成用于一种或多种不同类型的有效载荷递送能力。
UAV系统300还可以包括可以采取各种形式的远程设备306。通常,远程设备306可以是通过其可以发出调度UAV的直接或间接请求的任何设备。(请注意,间接请求可能涉及可能通过调度UAV进行响应的任何通信,比如请求包裹递送)。在示例实施例中,远程设备306可以是移动电话、平板电脑、膝上型电脑、个人电脑或任何联网的计算设备。此外,在一些情况下,远程设备306可能不是计算设备。作为示例,允许通过普通老式电话服务(POTS)进行通信的标准电话可以用作远程设备306。其他类型的远程设备也是可能的。
此外,远程设备306可以配置为经由一个或多个类型的通信网络308与访问系统302进行通信。例如,远程设备306可以通过在POTS网络、蜂窝网络和/或诸如因特网的数据网络上进行通信来实现与访问系统302(或者访问系统302的操作员)通信。还可以使用其他类型的网络。
在一些实施例中,远程设备306可以配置成允许用户请求将一个或多个物品递送到期望的位置。例如,用户可以通过他们的移动电话、平板电脑或笔记本电脑要求UAV将包裹递送到他们的家中。作为另一示例,用户可以请求动态递送到递送时他们所在的任何地方。为了提供这种动态递送,UAV系统300可以从用户的移动电话或用户人员的任何其他设备接收位置信息(例如GPS坐标等),使得UAV可以导航到用户的位置(如由他们的移动电话指示)。
在说明性布置中,中央调度系统310可以是服务器或服务器组,其配置为从访问系统302接收调度消息请求和/或调度指令。这样的调度消息可以请求或指示中央调度系统310协调UAV部署到各个目标位置。中央调度系统310可以进一步配置为将这样的请求或指令路由到一个或多个本地调度系统312。为了提供这样的功能,中央调度系统310可以经由数据网络(比如因特网或为访问系统和自动调度系统之间的通信建立的专用网络)而与访问系统302进行通信。
在所示的配置中,中央调度系统310可以配置为协调从多个不同的本地调度系统312调度UAV304。因此,中央调度系统310可以跟踪哪个UAV304位于哪个本地调度系统312,该UAV304当前可用于部署和/或每个UAV304配置用于哪个服务或操作(在UAV机群包括配置用于不同服务和/或操作的多种类型的UAV的情况下)。另外或可替代地,每个本地调度系统312可以配置为跟踪其相关UAV304中的哪个当前可用于部署和/或当前处于物品运输中。
在一些情况下,当中央调度系统310从访问系统302接收到对与UAV相关的服务(例如物品的运输)的请求时,中央调度系统310可以选择特定的UAV304来进行调度。中央调度系统310可以相应地指示与所选择的UAV相关的本地调度系统312调度所选择的UAV。然后本地调度系统312可以操作其相关的部署系统314来启动所选择的UAV。在其它情况下,中央调度系统310可以将对与UAV相关的服务的请求转发到在请求支持的位置附近的本地调度系统312,并且将特定UAV304的选择留给本地调度系统312。
在示例配置中,本地调度系统312可被实现为与其控制的部署系统314相同的位置处的计算系统。例如,本地调度系统312可以通过安装在诸如仓库的建筑物的计算系统来实现,与特定本地调度系统312相关的部署系统314和UAV304也位于此。在其他实施例中,本地调度系统312可以在远离其相关的部署系统314和UAV304的位置处实现。
UAV系统300的所示配置的多种变化和替代是可能的。例如,在一些实施例中,远程设备306的用户可以请求直接从中央调度系统310递送包裹。为此,应用可以在远程设备306上实现,允许用户提供关于所请求的递送的信息,并且生成和发送数据消息以请求UAV系统300提供递送。在这样的实施例中,中央调度系统310可以包括处理由这样的应用生成的请求的自动功能,评估这样的请求,并且如果适当的话,与适当的本地调度系统312协调以部署UAV。
此外,这里归因于中央调度系统310、本地调度系统312、访问系统302和/或部署系统314的功能中的一些或全部可被组合在单个系统中,在更复杂的系统中实现,和/或以各种方式在中央调度系统310、本地调度系统312、访问系统302和/或部署系统314之间重新分配。
此外,虽然每个本地调度系统312示出为具有两个相关的部署系统314,但是给定的本地调度系统312可以可选地具有更多或更少的相关的部署系统314。类似地,尽管中央调度系统310示出为与两个本地调度系统312进行通信,但是中央调度系统310可以可选地与更多或更少的本地调度系统312进行通信。
在另一方面,部署系统314可以采取各种形式。通常,部署系统314可以采取用于物理地发射一个或多个UAV304的系统的形式或包括该发射系统。这种发射系统可以包括提供自动UAV发射的特征和/或允许人类辅助UAV发射的特征。此外,部署系统314每个可以配置成发射一个特定的UAV304,或发射多个UAV304。
部署系统314还可以配置为提供附加功能,例如包括与诊断有关的功能,比如验证UAV的系统功能,验证容纳在UAV内的设备(例如有效载荷递送设备)的功能和/或维护容纳在UAV中的设备或其他物品(例如通过监测有效载荷的状态,比如其温度、重量等)。
在一些实施例中,部署系统314及其相应的UAV304(以及可能相关的本地调度系统312)可以策略性地分布在诸如城市的区域中。例如,可以策略性地分布部署系统314,使得每个部署系统314靠近一个或多个有效载荷拾取位置(例如在餐馆、商店或仓库附近)。然而,取决于具体实施方式,部署系统314(以及可能的本地调度系统312)可以以其他方式分布。作为另外的示例,允许用户通过UAV运输包裹的售货亭可以安装在各个位置。这样的售货亭可以包括UAV发射系统,并且可以允许用户提供他们的包裹以装载到UAV上,并支付UAV运输服务等。其他示例也是可能的。
在另一方面,UAV系统300可以包括或者可以访问用户账户数据库316。用户账户数据库316可以包括用于多个用户账户的数据,并且它们每个都与一个或多个人相关。对于给定的用户账户,用户账户数据库316可以包括与提供UAV有关的服务相关或有用的数据。通常,与每个用户账户相关的用户数据可选地由相关用户提供和/或与相关用户的许可一起收集。
此外,在一些实施例中,如果人们希望由UAV系统300的UAV304提供与UAV相关的服务,则可能需要人们注册UAV系统300的用户账户。这样,用户账户数据库316可以包括用于给定用户账户(例如用户名和密码)的授权信息和/或可以用来授权访问用户帐户的其他信息。
在一些实施例中,人们可以将他们的一个或多个设备与他们的用户账户相关,使得他们可以访问UAV系统300的服务。例如,当一个人使用相关的移动电话时,例如放置呼叫访问系统302的操作员或者向调度系统发送请求UAV相关服务的消息,电话可以通过唯一的设备标识号码来识别,并且呼叫或消息然后可以归属于相关的用户帐户。其他示例也是可能的。
V.用于有效载荷递送的示例系统和装置
图4A、4B和4C示出了根据示例实施例的包括有效载荷递送系统410(也可以称为有效载荷递送装置)的UAV400。如图所示,用于UAV400的有效载荷递送系统410包括联接到线轴404的系绳402、有效载荷锁闩406以及经由有效载荷联接装置412联接到系绳402的有效载荷408。有效载荷锁闩406可以用于交替地固定有效载荷408并在递送时释放有效载荷408。例如,如图所示,有效载荷锁闩406可以采取一个或多个销的形式,其可以与有效载荷联接装置412接合(例如通过滑入有效载荷联接装置412中的一个或多个接收槽中)。将有效载荷锁闩406的销插入有效载荷联接装置412可以将有效载荷联接装置412固定在UAV400下侧的插座414内,从而防止有效载荷408从UAV400下降。在一些实施例中,有效载荷锁闩406可以布置成接合线轴404或有效载荷408而不是有效载荷联接装置412,以防止有效载荷408下降。在其他实施例中,UAV400可以不包括有效载荷锁闩406,并且有效载荷递送装置可以直接联接到UAV400。
在一些实施例中,线轴404可以用于展开系绳402,使得有效载荷408可以从UAV400通过系绳402和有效载荷联接装置412降低到地面。有效载荷408本身可以是用于递送的物品,并且可以容纳在(或者以其他方式结合)包裹、容器或配置成与有效载荷锁闩406连接的其他结构中。实际上,UAV400的有效载荷递送系统410可以用于当UAV400在上方盘旋时以受控的方式将有效载荷408自主地降低到地面,以便于将有效载荷408递送到地面上。
如图4A所示,在从发射站点到目标位置420的飞行期间,有效载荷锁闩406可处于闭合位置(例如销与有效载荷联接装置412接合),以将有效载荷408保持在UAV400的底部或靠近该底部,或者甚至部分地或者完全在UAV400内。目标位置420可以是直接在期望的递送位置上方的空间中的点。然后,当UAV400到达目标位置420时,UAV的控制系统(例如图2的系绳控制模块216)可以将有效载荷锁闩406切换到打开位置(例如将销从有效载荷联接装置412脱离),从而允许有效载荷408从UAV400降低。控制系统可以进一步操作线轴404(例如通过控制图2的电动机222),使得通过有效载荷联接装置412固定到系绳402的有效载荷408降低到地面,如图4B所示。
一旦有效载荷408到达地面,控制系统就可继续操作线轴404以降低系绳402,从而引起系绳402的过延伸。在系绳402的过延伸期间,有效载荷联接装置412可以随着有效载荷408在地面上保持静止而继续降低。有效载荷联接装置412上的向下动量和/或重力可以使有效载荷408从有效载荷联接装置412分离(例如通过滑离有效载荷联接装置412的钩)。在释放有效载荷408之后,控制系统可操作线轴404以使系绳402和有效载荷联接装置412朝向UAV400缩回。一旦有效载荷联接装置到达或接近UAV400,控制系统可操作线轴404以将有效载荷联接装置412拉入插座414,并且控制系统可以将有效载荷锁闩406切换到闭合位置,如图4C所示。
在一些实施例中,当从UAV400降低有效载荷408时,控制系统可基于系绳402从线轴404的展开长度检测有效载荷408和/或有效载荷联接装置412何时已降低到地面或其附近。当缩回系绳402时,可以使用类似的技术来确定有效载荷联接装置412何时在UAV400处或其附近。如上所述,UAV400可以包括用于提供指示线轴404旋转的数据的编码器。基于来自编码器的数据,控制系统可以确定线轴404经历了多少次旋转,并且基于旋转次数,确定从线轴404展开的系绳402的长度。例如,控制系统可以通过将线轴404的旋转次数乘以缠绕在线轴404上的系绳402的周长来确定系绳402的展开长度。在一些实施例中,比如当线轴404狭窄或者当系绳402具有大直径时,线轴404上的系绳402的周长可随着系绳402从系绳卷绕或展开而变化,因此控制系统可以配置为在确定展开的系绳长度时考虑这些变化。
在其他实施例中,控制系统可以使用各种类型的数据和各种技术来确定有效载荷408和/或有效载荷联接装置412何时降低到地面或其附近。此外,用于确定有效载荷408何时在地面或其附近的数据可以由UAV400上的传感器、有效载荷联接装置412上的传感器和/或向控制系统提供数据的其他数据源提供。
在一些实施例中,控制系统本身可以位于有效载荷联接装置432和/或UAV400上。例如,有效载荷联接装置412可以包括通过硬件、软件和/或固件实现的逻辑模块,其使UAV400如本文所述起作用,并且UAV400可包括与有效载荷联接装置432通信以使UAV400执行本文所述功能的逻辑模块。
图5A示出了根据示例实施例的包括有效载荷510的有效载荷递送装置500的透视图。有效载荷递送装置500位于UAV(未示出)的机身内,并包括由电动机512提供动力的绞盘514以及缠绕在绞盘514上的系绳502。系绳502附接到位于定位在UAV(未示出)的机身内的有效载荷联接装置插座516内的有效载荷连接装置800。有效载荷510固定到有效载荷联接装置800。在该实施例中,有效载荷510的顶部513固定在UAV的机身内。锁定销570示出为延伸穿过附接到有效载荷510的手柄511,以在高速飞行期间确实有效地将有效载荷固定在UAV下方。
图5B是图5A中所示的有效载荷递送装置500和有效载荷510的横截面侧视图。在该视图中,示出了有效载荷联接装置与有效载荷联接装置插座536紧密定位。系绳502从绞盘514延伸并且附接到有效载荷联接装置800的顶部。有效载荷510的顶部513示出与手柄511一起定位在UAV(未示出)的机身内。
图5C是图5A和5B中所示的有效载荷递送装置500和有效载荷510的侧视图。有效载荷510的顶部513示出为位于UAV的机身内。绞盘514已用于缠绕系绳502以将有效载荷联接装置定位在有效载荷联接装置插座516内。图5A-C公开了有效载荷10,其呈现空气动力学六角形手提袋的形状,其中基部和侧壁为六个侧面六边形且手提袋包括通常尖的前表面和后表面,它们形成在提供空气动力学形状的手提袋的侧壁和基部的交叉处。
VI.示例胶囊、插座和包裹/手提袋
图6A是根据示例实施例的有效载荷联接装置800的透视图。有效载荷联接装置800包括系绳安装点802和用于将有效载荷的手柄定位在其中的槽808。下唇或钩806位于槽808下方。还包括具有螺旋凸轮表面804a和804b的外凸起804,所述表面适于同与UAV机身定位的有效载荷联接装置插座内的相应凸轮配合表面配合。
图6B是图6A中所示的有效载荷联接装置800的侧视图。槽808示出为位于下唇或钩806上方。如图所示,下唇或钩806具有底切的外表面806a,使得它不向外延伸至槽805上方的外表面,使得下唇或钩806在有效载荷已经分离之后不会与其手柄重新接合,或者在收回到UAV期间不会与电力线或树枝接合。
图6C是图6A和6B中所示的有效载荷联接装置800的前视图。下唇或钩806示出为定位在适于固定有效载荷手柄的槽808下方。
图7是在插入位于UAV的机身550中的有效载荷联接装置插座516之前的图6A-6C中所示的有效载荷联接装置800的透视图。如前所述,有效载荷联接装置800包括位于下唇或钩806上方的槽808,其适于接收有效载荷的手柄。有效载荷递送系统500的机身550包括定位在UAV的机身550内的有效载荷联接装置插座516。有效载荷联接装置800包括外突起810,其具有以圆顶点相遇的螺旋凸轮表面810a和810b。螺旋凸轮表面810a和810b适于与位于定位在UAV的机身550内的有效载荷联接装置插座516内的向内突起530的表面530a和530b配合。还包括位于UAV的机身550内的纵向凹陷约束槽540,其适于接收和限制有效载荷的顶部(未示出)。当有效载荷联接装置800被拉入有效载荷联接装置插座516时,外凸起810的凸轮表面810a和810b与有效载荷联接装置插座516内的凸轮表面530a和530b接合,并且有效载荷联接装置800旋转到在UAV的机身550内的期望的对齐。
图8是在插入位于UAV的机身550中的有效载荷联接装置插座516之前的图6A-6C中所示的有效载荷联接装置800的相对侧的另一透视图。如图所示,有效载荷联接装置800包括下唇或钩806。外突起804示出为从具有适于与位于定位在UAV的机身550内的有效载荷联接装置插座516内的内突起530的凸轮表面530a和530b接合和配合的螺旋凸轮表面810a和810b的有效载荷联接装置向外延伸。应当注意,凸轮表面804a和804b在尖顶点相遇,该尖顶与图7中所示的凸轮表面810a和810b的圆或钝顶点不对称。以这种方式,凸轮表面810a和810b的圆或钝顶点防止有效载荷联接装置800可能的卡住,因为凸轮表面接合位于定位在UAV的机身550内的有效载荷联接装置插座516内的凸轮表面530a和530b。特别地,凸轮表面804a和804b定位成略高于凸轮表面810a和810b的圆或钝顶点。结果,凸轮表面804a和804b的更尖尖端接合位于有效载荷递送系统500的机身550内的有效载荷联接装置插座516内的凸轮表面530a和530b,从而在凸轮表面810a和810b的圆或钝顶点接合有效载荷联接装置插座516内的相应凸轮表面之前稍微启动有效载荷联接装置800的旋转。以这种方式,有效载荷联接装置上的凸轮表面的两个顶点(或尖端)终止于有效载荷联接装置插座内的接收凸轮的相同侧上的情况得到防止。这种情况导致防止有效载荷联接装置在插座内卡住。
图9示出了定位在UAV的机身中的凹陷约束槽和有效载荷联接装置插座的透视图。特别地,有效载荷递送系统500包括机身550,机身550中具有有效载荷联接装置插座516,其包括具有凸轮表面530a和530b的向内突起530,凸轮表面530a和530b适于与有效载荷联接装置(未示出)上的相应凸轮表面配合。还包括纵向延伸的凹陷约束槽540,有效载荷的顶部适于定位并固定在其中于机身550内。
图10A示出了有效载荷递送装置500的侧视图,其中当有效载荷510在触地递送之前向下移动时,有效载荷510的手柄511固定在有效载荷联接装置800内。在有效载荷触地之前,有效载荷510的手柄511包括孔513,有效载荷联接装置800的下唇或钩延伸穿过孔513。手柄位于有效载荷联接装置800的槽内,有效载荷联接装置800在有效载荷510下降到着陆点期间悬挂在有效载荷递送系统500的系绳502上。
图10B示出了在有效载荷510落在地面上之后有效载荷递送装置500的侧视图,示出了有效载荷联接装置800与有效载荷510的手柄511分离。一旦有效载荷510接触地面,有效载荷联接装置800通过惯性或重力继续向下移动(随着绞盘进一步展开)并且使有效载荷联接装置800的下唇或钩808与有效载荷510的手柄511分离。有效载荷联接装置800保持悬挂在系绳502上,并且可被绞回到UAV的有效载荷联接插座。
图10C示出了有效载荷递送装置500的侧视图,其中有效载荷联接装置800移动远离有效载荷510的手柄511。这里,有效载荷联接装置800与有效载荷510的手柄511的孔513完全分离。系绳502可用于将有效载荷联接装置绞回到位于UAV机身中的有效载荷联接装置插座。
图11是有效载荷510的手柄511的侧视图。手柄511包括孔513,有效载荷联接装置的下唇或钩延伸穿过该孔513以在递送期间悬挂有效载荷。手柄511包括下部515,其固定到有效载荷的顶部。还包括孔514和516,定位在UAV的机身内的锁定销可以延伸通过孔514和516,以在高速向前飞行到递送位置期间将手柄和有效载荷固定在固定位置。手柄可以由薄的柔性塑料材料构成,该塑料材料是柔性的并且提供足够的强度以在向前飞行到递送点期间以及在有效载荷的输送和/或收回期间将有效载荷悬挂在UAV下方。在实践中,手柄可以弯曲以将手柄定位在有效载荷联接装置的槽内。手柄511还具有足够的强度以在有效载荷联接装置旋转到有效载荷联接装置插座内的期望定向和有效载荷的顶部旋转成与凹陷约束槽就位期间承受扭矩。
图12示出了一对锁定销570、572,其延伸穿过有效载荷510的手柄511中的孔514和516,以将手柄511和有效载荷510的顶部固定在UAV的机身内。以这种方式,手柄511和有效载荷510可以固定在UAV的机身内。在该实施例中,锁定销570和572具有锥形形状,使得它们略微向上拉动包裹或至少移除存在的任何向下松弛。在一些实施例中,锁定销570和572可以完全塞住有效载荷510的手柄511的孔514和516,以在UAV的机身内提供有效载荷的手柄和顶部的非常牢固的附接。尽管优选地,锁定销是锥形的,但是在其他应用中,它们可以具有其他几何形状,比如圆柱形几何形状。
图13A是在使有效载荷的手柄定位在有效载荷联接装置900的槽920内之前的有效载荷联接装置900的透视图。有效载荷联接装置900在系绳902所插入的部分914的内表面904上具有系绳槽906。还包括一对向上延伸的指状物908和910,在它们之间具有槽912。有效载荷的手柄可以插入有效载荷联接装置900的槽920中,槽920位于向上延伸的指状物908和910与内表面904之间。
图13B是在递送有效载荷并使有效载荷联接装置900与有效载荷的手柄分离之后的有效载荷联接装置900的透视图。在该实施例中,部分914的上部被加重,使得当有效载荷联接装置900与有效载荷的手柄分离时,有效载荷联接装置900旋转180度,使得指状物908和910向下延伸,从而防止槽920与有效载荷的手柄重新接合或者在收回到UAV的机身期间与树枝或电线接合。在分离之后的旋转期间,系绳902从系绳槽906(图13A中所示)拉动并穿过指状物908和910之间的槽912,使得有效载荷联接装置900悬挂在系绳902上。
图14A-E提供了图13A和13B中所示的有效载荷联接装置900的各种视图。如图14A-E所示,有效载荷联接装置900包括位于向上延伸的指状物908和910与内表面904之间的槽920。系绳槽906位于内表面904中。槽912也在向上延伸的指状物908和910之间延伸。系绳附接点922定位在有效载荷联接装置900的底部。系绳槽906从系绳附接点922延伸到内表面904的顶部。有效载荷联接装置914的上部914被加重,使得在有效载荷着陆时,有效载荷联接装置自动地与有效载荷的手柄分离,并且加重的上部914使有效载荷联接装置900向下旋转180度。在该旋转期间,系绳从系绳槽906中拉出,并且有效载荷联接装置通过附接到系绳附接点922的系绳悬挂在UAV上,其中指状物908和910指向下方。结果,当收回到UAV时,防止指状物908和910重新接合有效载荷的手柄,并且还防止在收回到UAV期间接合树枝或电力线。尽管未在图14A-E中示出,有效载荷联接装置900还可以包括如在有效载荷联接装置800中所示的凸轮表面,其与位于UAV机身中的有效载荷联接装置插座内的配合凸轮接合,以将有效载荷联接装置定向在有效载荷联接装置插座内的期望方向。
有效载荷联接装置900还有利地是固态设计,其不包括移动部件,从而降低有效载荷联接装置的复杂性和成本并且消除可能发生故障的移动部件。由此提供了更可靠的有效载荷联接装置。
图15A-E提供了有效载荷联接装置1000的各种视图。在该实施例中,有效载荷联接装置1000具有大致球形形状。槽1020定位在外唇或钩1010与圆形部分1014之间。槽1020适于接收有效载荷的手柄。系绳附接点1022定位在圆形部分1014上。系绳槽1006从系绳附接点1022延伸到槽1020并适于接收和保持系绳。圆形部分1014或部分1010可以被加重,使得当有效载荷接触地面时,有效载荷的手柄与有效载荷联接装置1000的槽分离。在从有效载荷的手柄分离期间,加重的圆形部分1010向前翻转并旋转90度,使得有效载荷联接装置1000从附接到系绳附接点1022的系绳的端部悬挂。以这种方式,槽1020不再面向上并且防止有效载荷联接装置1000在收回到UAV期间与有效载荷的手柄重新接合,并且还防止有效载荷联接装置接合树枝或电力线。
与上述有效载荷联接装置800和900一样,有效载荷联接装置1000也有利地是不包括移动部件的固态设计,从而降低了有效载荷联接装置的复杂性和成本并且消除了可能发生故障的移动部件。由此提供了更可靠的有效载荷联接装置。
图16A-D示出了有效载荷联接装置800'的各种视图,其是上述有效载荷联接装置800的变型。有效载荷联接装置800'包括与有效载荷联接装置800相同的外部特征。然而,在有效载荷联接装置800'中,下唇或钩806'包括向上延伸的柄806a',其在有效载荷联接装置800'的壳体812中的柄腔817内延伸。系绳的端部延伸穿过壳体812并附接到柄806a'的端部。壳体812可以向上移动到图16A和16C所示的位置,从而在下唇或钩806'和壳体812之间打开槽808,并允许有效载荷的手柄放置在槽808内。
一旦有效载荷的手柄定位在槽808内,壳体812通过重力向下移动以关闭槽808并将有效载荷的手柄固定在下唇或钩806'和壳体812之间,如图16B和16D所示。一旦有效载荷触地,有效载荷联接装置800'向下移动,使得有效载荷的手柄从槽808移除并与有效载荷联接装置800'分离。
另外,一旦有效载荷的手柄与有效载荷联接装置800'分离,重力就迫使壳体817与下唇或钩806a'接合,使得槽808处于其常闭位置。以这种方式,防止在收回期间与有效载荷的手柄的重新接合,并且因为槽808处于其常闭位置,所以还防止与树枝或电力线接合。
在每个有效载荷联接装置800、800'、900和1000中,上端和下端是圆形的或半球形的,以防止有效载荷联接装置在从UAV的机身下降或收回到其期间钩住。
本实施例提供用于UAV的高度集成的基于绞盘的拾取和递送系统。提供了许多显著的优点。例如,提供了在不需要着陆的情况下拾取和递送包裹的能力,因为系统能够在飞机悬停的情况下绞卷包裹。虽然在一些位置,可以提供诸如用于着陆或装载UAV的平台或高架的基础设施,但是在其他位置,可能不需要在商家或客户位置处的基础设施。其优势包括高任务灵活性和可能很少或根本没有基础设施安装成本以及有效载荷几何形状的增加的灵活性。
此外,有效载荷递送系统可以在绞卷期间自动对齐有效载荷的顶部,使其沿着飞机纵轴的最小阻力定向。这种对齐可以在拾取后实现高速向前飞行。通过有效载荷钩和插座的形状实现对齐。在有效载荷联接装置800中,下唇或钩806具有围绕其周边的凸轮特征,当其接合到UAV机身的插座内的凸轮特征时,总是将其定向在限定的方向上。胶囊两侧的凸轮形状的尖端是不对称的,以防止在90度定向上卡住。在这方面,螺旋凸轮表面可以在有效载荷联接机构的一侧的顶点处相遇,并且螺旋凸轮表面可以在有效载荷联接机构的另一侧的圆顶点处相遇。钩专门设计成使得包裹悬挂在钩的中心线上,从而可以在90度的两个方向上对齐。
有效载荷联接装置800、800'、900和1000包括围绕槽形成的钩,使得当有效载荷在递送时接触地面时,钩也被动且自动地释放有效载荷。这是通过钩槽的形状和角度以及有效载荷上的相应手柄来实现的。当有效载荷由于胶囊的质量以及希望继续使胶囊向下移动通过有效载荷的惯性而接触时,钩很容易从手柄上滑下。钩的端部设计成从胶囊的主体略微凹陷,这防止钩意外地重新附接到手柄上。成功释放后,钩被绞回到飞机中。所有这些功能(在拾取期间的包裹对齐和在递送期间的被动释放)在该有效载荷联接装置800、900和1000中没有任何移动部件(称为固态设计)的情况下实现。这大大提高了可靠性并降低了成本。简单的设计还使用户交互非常清晰和不言自明。
VII.有效载荷拾取期间的系绳控制
UAV能够在不着陆的情况下拾取并递送有效载荷。在一些示例中,UAV能够通过在悬停时缠绕和展开系绳来升高和降低联接到系绳的有效载荷。因此,UAV可以拾取并递送有效载荷,而无需由商家或客户建立基础设施,从而增加递送位置和/或有效载荷几何形状的灵活性并减少或消除与基础设施的制造或安装相关的成本。在其他示例中,UAV可以配置成着落在各种抬高的结构上,比如高架或支架,并且从其抬高的着陆位置,通过缠绕或展开系绳来拾取或递送有效载荷。
图17示出了用于系拴拾取有效载荷(例如包裹)以便随后递送到目标位置的方法1700。方法1700可以由诸如本文其他地方描述的那些UAV执行。例如,方法1700可以由具有绞盘系统的UAV的控制系统执行。此外,绞盘系统可包括设置在线轴上的系绳、可以第一模式和第二模式操作的电动机,其分别抵抗和辅助由于重力而展开系绳(例如通过向前或向后驱动线轴),有效载荷联接装置,其将系绳机械地联接到有效载荷,以及有效载荷锁闩,其可在防止有效载荷从UAV降低的闭合位置和允许有效载荷从UAV降低的打开位置之间切换。
如方法1700的方框1702所示,当UAV到达拾取位置(也称为源位置)时,UAV的控制系统可以打开有效载荷锁闩,使得系绳和有效载荷联接装置可以在拾取位置朝地面降低。
在框1704处,控制系统操作电动机以展开预定长度的系绳。该展开的长度可以对应于有效载荷联接装置的预期有效载荷附接高度,有效载荷联接装置附接到系绳的下端。有效载荷附接高度可以是人或者可能是机器人设备可以抓住有效载荷联接装置以将联接装置附接到有效载荷的高度。例如,有效载荷附接高度可以是小于地平面上方两米的高度。其他示例也是可能的。
在展开预定长度的系绳之后,控制系统可以等待预定的有效载荷附接时段,如方框1706所示。该附接时段允许人或者机器人设备有时间将有效载荷(例如用于递送的包裹)附接到有效载荷联接装置。预定有效载荷附接时段可以是固定值,或者可以基于UAV的操作状态而变化。
当有效载荷附接时段结束时,控制系统可以以第二模式操作绞盘电动机达预定的附接验证时段,如方框1708所示。具体地,电动机可操作以便在附接验证时段期间向上拉动系绳,以便将系绳保持在适当位置或以一定的速率收回系绳。由于有效载荷的重量增加,当附接有效载荷时,将系绳保持在适当位置或使系绳以一定速率缩回所需的电动机电流将更大。这样,控制系统可以至少部分地基于预定附接验证时段期间的电动机电流来确定有效载荷联接装置是否机械地联接到有效载荷,如方框1710所示。
实际上,例如,如果电动机电流小于附接阈值电流,则控制系统可以确定有效载荷尚未附接到有效载荷联接装置,并且可以重复降低有效载荷的过程(这次按预定的额外长度),等待预定的有效载荷附接时段,然后向上拉动系绳以测试有效载荷附接,如方框1704至1710所示。另一方面,如果电动机电流大于或等于附接阈值电流,并且方框1710导致确定有效载荷联接装置机械地联接到有效载荷,则控制系统可操作绞盘电动机以缩回系绳并将附接的有效载荷提升到UAV,如方框1712所示。
控制系统可以继续缩回系绳,直到它感测到有效载荷联接装置位于UAV处或其附近,此时它启动动作以固定有效载荷用于飞行到目标位置。例如,方法1700包括可用于将包裹和联接装置固定在UAV的插座中的功能,比如图5A-5C所示的配置。
更具体地,在方框1714处,控制系统可以确定两者:(a)系绳的展开长度小于阈值长度,以及(b)电动机电流大于阈值电流。当这两个条件都成立时,这可以用作有效载荷联接装置和/或有效载荷已经到达UAV插座的指示。特别地,当计算的系绳展开长度处于或接近零时,这可以指示有效载荷联接装置和/或有效载荷已经一直被提升到UAV。此外,当有效载荷联接装置和/或有效载荷接触UAV的插座区域时,电动机电流可能随着电动机的速度控制器试图继续向上拉动有效载荷而增加。并且,通过考虑这两个指示,控制系统可以避免误报。
因此,在检测到上述两个指示时,控制系统可以响应地以第一模式操作电动机以将有效载荷拉入UAV下表面上的插座内并将有效载荷定向在其内,如方框1716所示。特别地,控制系统可以操作电动机以增加施加到系绳的扭矩,比如通过将提供给电动机的电流增加到预定值,以帮助确保有效载荷联接装置(以及可能有效载荷)牢固地抵靠在UAV插座的相应表面上,使得有效载荷锁闩(例如图12的销570和572)可以闭合以固定有效载荷用于飞行到目标位置。因此,在向上方向上向系绳施加扭矩达预定的时间段之后,控制系统可以闭合有效载荷锁闩,如方框1718所示。在有效载荷被固定用于飞行的情况下,UAV可以导航到目标位置以用于递送。
VIII.有效载荷递送期间的系绳控制
一旦UAV到达目标位置以进行递送,UAV的控制系统就可以响应地以递送模式操作。图18是示出根据示例实施例的用于在递送模式下操作UAV的方法1800的流程图。
更具体地,一旦UAV到达并且悬停在目标位置上以进行系拴递送,UAV的控制系统就可以操作电动机以根据预定的下降曲线展开系绳,如方框1802所示。预定的下降曲线可以通过指定电动机的期望旋转速度来控制有效载荷的下降速率。例如,下降曲线可以指定有效载荷下降持续时间的恒定下降速率或可变下降速率。
在一些示例中,由预定下降曲线指定的期望旋转电动机速度可以基于机器学习数据,该机器学习数据可以从先前飞行的数据推断。例如,为了递送到特定位置,控制系统可以使用先前在先前递送到特定位置期间使用的下降曲线。可替代地,如果在先前递送到该特定位置或某个其他位置期间使用下降曲线导致一个或多个检测到的错误(例如未能将有效载荷与系绳分离、损坏有效载荷等),则控制系统可以改变下降曲线(例如通过在有效载荷下降的各个阶段期间增加或减小期望的电动机速度)或者选择使用默认下降曲线来代替。
在示例性方法中,控制系统可以不对有效载荷的下降施加显著控制,直到其更接近地面。例如,在系绳展开的某个点,控制系统可以确定系绳的展开长度大于阈值长度,并且响应地以预触地模式操作,如方框1804所示。阈值长度可以对应于有效载荷的预定近地高度;例如,对于旁观者和/或地面结构的安全性需要更多控制的高度,和/或保护有效载荷及其内容物免受损坏的高度。
如上所述,在预触地模式中,控制系统可以密切关注有效载荷,以提高在地面上成功释放有效载荷的机会。特别地,当在预触地模式下操作时,控制系统操作电动机,使得系绳根据预定的下降曲线继续展开,如方框1804a所示,同时监测电动机电流和电动机速度,如方框1804b所示。可以将电动机电流与预定的有效载荷-未联接电流进行比较,以检测电动机电流何时小于预定的有效载荷-未联接电流。另外,可以将电动机速度与预定的有效载荷-未联接速度进行比较,以检测电动机速度何时小于预定的有效载荷-未联接速度,如方框1804c所示。当电动机电流小于预定的有效载荷-未联接电流并且电动机速度小于预定的有效载荷-未联接速度时,控制系统响应地切换到在可能触地模式下的操作。
可以实施可能触地模式以努力验证包裹实际上已到达地面(或换句话说,以帮助防止与地面接触的误报检测)。例如,当在可能触地模式下操作时,控制系统可以分析电动机电流以验证电动机电流在触地验证时段内保持低于预定的有效载荷-未联接电流(例如在此期间可能允许少量的波动),如方框1806所示。在实践中,可以应用施密特触发器来验证检测到的电动机电流下降到有效载荷-未联接阈值以下不是噪声或一些临时阻塞的结果,并且实际上是由于有效载荷搁在地面上。用于验证有效载荷的触地的其他技术也是可能的。
一旦验证了有效载荷的触地,控制系统就操作电动机,使得系绳和有效载荷联接装置的过延伸发生,如方框1808所示。当有效载荷停止时,发生过延伸,同时系绳继续展开。实际上,例如,控制系统可以通过例如使电动机的方向并因此使电动机施加到系绳的扭矩的方向反转,将绞盘电动机从第一模式切换到第二模式。因此,电动机可以从减慢系绳的下降切换到迫使系绳展开,从而发生系绳的过延伸。系绳的过延伸可以进而使有效载荷联接装置降低到与有效载荷联接发生的高度以下(并且可能一直到地面)。在其他实施例中,方框1808可以包括控制系统简单地关闭电动机,并允许重力将有效载荷联接装置拉下并使系绳过延伸。
此外,如图6A-6C、10A-10C和11所示,有效载荷和/或有效载荷联接装置可以具有接口表面,使得有效载荷和有效载荷联接装置在过延伸期间的相互作用使有效载荷联接装置偏转到有效载荷的一侧。这样,有效载荷联接装置的联接特征(例如钩)将不再与有效载荷的相应联接特征(例如手提袋上的手柄)对齐。如此定位,绞盘系统可以将系绳和有效载荷联接装置缩回到UAV,而有效载荷联接装置不重新联接到有效载荷,从而将包裹留在地面上。
在方法1800的一些示例中,控制系统可以配置为在打开有效载荷锁闩之前操作电动机以在系绳上施加向上的力。这可以允许有效载荷锁闩被更容易打开,因为有效载荷可以布置成当锁闩处于闭合位置时将其一些或全部其重量搁置在有效载荷锁闩上。当试图将锁闩切换到打开位置时,有效载荷的重量可以增加与有效载荷锁闩的摩擦,因此将有效载荷提升预定量可以减少有效载荷锁闩卡在闭合位置的发生。另外,在打开有效载荷锁闩之后并且在展开系绳之前,控制系统可以配置成操作电动机以将系绳保持在基本恒定的位置。这可以允许有效载荷的重量向下拉动有效载荷并且抵靠着有效载荷联接装置,使得有效载荷变得牢固地安置在有效载荷联接装置的联接机构(例如钩)中。
IX.通过控制系绳进行用户交互和反馈
实际上,用户可以出于各种原因以各种方式与所公开的绞盘系统交互。例如,用户可以与绞盘系统交互以经由有效载荷联接装置手动地将有效载荷联接到系绳或与之分离,比如用于有效载荷递送目的或用于有效载荷拾取目的。在这样做时,用户可以将力直接施加到系绳上和/或可以经由有效载荷联接装置向系绳施加力等。此外,与绞盘系统的这种相互作用可以有效地也相当于与UAV本身的相互作用,因为UAV可以基于这些力来调整其操作(例如UAV可以参与考虑那些力的飞行稳定性)。
当用户与所公开的绞盘系统交互时,用户可能遇到各种挑战。例如,用户可能不知道与绞盘系统的交互如何最终可能影响绞盘系统的操作和/或UAV的操作。结果,用户可能无意中损坏UAV和/或绞盘系统。在另一示例中,用户可能不知道UAV和/或绞盘系统计划执行的任何未来操作。结果,用户可能无意中使UAV和/或绞盘系统停止执行计划的操作。在又一示例中,用户可能希望UAV和/或绞盘系统执行特定操作,但可能没有控制UAV或绞盘系统的操作的装置。其他示例也是可能的。
为了帮助解决这些挑战,所公开的绞盘系统可以配置为控制系绳以便与用户交互并向用户提供反馈。具体地,UAV的控制系统可以配备有解释与系绳的直接或间接用户交互的能力,可能响应于解释的交互来执行某些操作。而且,UAV的控制系统可以配备有通过操纵系绳向用户提供信息的能力,可能响应于用户与系绳的交互而这样做。
图19示出了用于促进对系绳的控制以便与用户交互和/或向用户提供反馈的方法1900。如方法1900的方框1902所示,UAV的控制系统可以确定用于设置在飞行器中的绞盘的电动机的一个或多个操作参数,该绞盘包括系绳和线轴。然后,控制系统可以在一个或多个操作参数中检测电动机的操作模式,该操作模式指示与系绳的有意的用户交互,如方法1900的方框1904所示。基于检测到的指示与系绳的有意的用户交互的操作模式,控制系统可以确定电动机响应过程,如方法1900的方框1906所示。并且如方法1900的方框1908所示,控制系统然后可以根据确定的电动机响应过程操作电动机。
i.确定电动机的运行参数
如上所述,UAV的控制系统可以确定电动机的一个或多个操作参数。实际上,电动机的运行参数可以是电动机活动的任何测量。尽管本文描述了某些操作参数,但是在不脱离本公开的范围的情况下,其他操作参数也是可能的。
作为示例,电动机的操作参数可以是电动机的电流特性,比如随时间或在特定时刻由提供给电动机和/或由电动机产生的电流水平等。在另一示例中,电动机的操作参数可以是电动机的速度特性,比如电动机的传动组件随时间或在特定时刻的旋转速度等。在又一示例中,电动机的操作参数可以是电动机的旋转特性,比如电动机的传动组件随时间的旋转程度等。其他示例也是可能的。
通常,控制系统可以以各种方式确定电动机的一个或多个操作参数。例如,控制系统可以从联接到电动机的一个或多个传感器接收指示操作参数的传感器数据。一旦控制系统接收到传感器数据,控制系统就可以使用传感器数据来确定和/或评估电动机的操作参数。
作为示例,电流传感器可以联接到电动机并且配置为生成指示提供给电动机和/或由电动机生成的电流水平的电流数据。利用这种布置,控制系统可以从电流传感器接收电流数据,并且可以使用接收的电流数据作为基础来确定电动机的电流特性。例如,控制系统可以使用所接收的电流数据作为基础来确定特定时间段内的电动机的特定电流水平。
在另一示例中,速度传感器可以联接到电动机并且配置成生成指示电动机的传动组件的旋转速度的速度数据。利用这种布置,控制系统可以从速度传感器接收速度数据,并且可以使用接收的电流数据作为基础来确定电动机的速度特性。例如,控制系统可以使用接收的速度数据作为基础来确定特定时间点的电动机的特定速度。
在又一示例中,编码器可以联接到电动机的传动组件并且配置为生成表示传动组件随时间的位置数据。利用这种布置,控制系统可以从编码器接收位置数据,并且可以使用接收的位置数据作为基础来确定电动机的旋转特性。例如,控制系统可以使用接收的位置数据作为基础来确定传动组件从第一时间点到第二时间点的旋转的程度和/或方向。其他示例和实例也是可能的。
图20接下来示出了说明电动机的示例电流特性2000的图表。如图所示,电流特性2000表示电动机随时间的电流水平。实际上,电流水平可能会根据各种因素随时间变化。例如,电流水平可基于电动机寻求提供(例如到系绳)的扭矩/力和/或基于提供给电动机的外部扭矩/力(例如经由系绳)等而变化。其他示例也是可能的。
ii.检测指示用户交互的电动机的操作模式
如上所述,控制系统可以在一个或多个操作参数中检测指示与系绳的有意的用户交互的电动机的操作模式。实际上,操作模式可以是一个或多个操作参数随时间的任何连续和/或非连续的值序列。此外,控制系统可以使用任何当前已知和/或未来开发的信号处理技术等来检测操作模式。尽管如此,操作模式可以采取各种形式。
在一种情况下,操作模式可以是在单个操作参数中找到的模式。例如,操作模式可以是电流特性的特定模式,比如由当前数据随时间表示的特定电流水平序列。然而,在另一种情况下,操作模式可以包括分别在相同时间段和/或不同的相应时间段内在两个或更多个操作参数中找到的模式。例如,操作模式可以是第一时间段上的电流特性的特定模式以及第二时间段(例如与第一时间段相同或不同)上的速度特性的特定模式。其他情况也是可能的。
给定上述布置,检测操作模式的控制系统可以涉及控制系统检测一个或多个确定的参数中的各种模式。作为示例(并且没有限制),检测操作模式的控制系统可以涉及检测以下的任何组合的控制系统:电动机电流的特定相对变化、电动机电流的特定变化率、特定电动机电流值、电动机电流值的特定顺序、电动机速度的特定相对变化、电动机速度的特定变化率、特定电动机速度值、电动机速度值的特定顺序、电动机旋转的特定相对变化、电动机旋转的特定变化率、特定电动机旋转值和/或电动机旋转值的特定序列等。
根据本公开,如所提到的,检测操作模式可以具体涉及检测指示与系绳的有意的用户交互的电动机的操作模式。更具体地,当用户以特定方式与系绳交互时,电动机可呈现特定操作模式。这样,控制系统可以检测到的已建立的操作模式(例如通过手动工程输入建立)可以各自对应于与系绳的相应用户交互。以这种方式,当控制系统检测到特定操作模式时,控制系统可以有效地检测与系绳的特定用户交互。在实践中,控制系统可以这样做简单地检测操作模式并且不必存在用户交互的逻辑指示。
然而,在一些情况下,控制系统可以维持或可以另外参考映射数据,该映射数据利用相应的用户交互来映射电动机的多个操作模式中的每一个。例如,映射数据可以将特定电流水平模式与用户在系绳上提供特定向下力的指示映射。在实践中,特定向下力可以是在基本垂直于地面的方向上施加的力和/或可以是在相对于地面的另一角度(例如45度)的方向上施加的力(例如当用户抓住摆动的系绳然后以一定角度拉动它时)。在另一示例中,映射数据可以利用用户以特定速率侧向移动系绳的指示来映射特定的速度水平模式。在实践中,这些指示可以各自采用任何可行的形式,比如字母、数字和/或逻辑布尔值等形式。因此,当控制系统检测到特定操作模式时,控制系统可以参考映射数据以确定分别映射到该特定操作模式的用户交互。
此外,不同的操作模式有时可以指示相同的用户交互。出于这个原因,控制系统可以布置为检测第一操作模式并且因此有效地检测与系绳的特定用户交互,并且还可以布置为检测第二操作模式并且因此有效地检测与系绳的相同的特定用户交互,比如用于确定如下面进一步描述的电动机响应过程的目的。可替代地,映射数据中的两个或更多个操作模式可以各自映射到相同的用户交互,使得控制系统在参考映射数据中的那些操作模式中的任何一个时检测相同的用户交互。其他情况也是可能的。
此外,当建立各种可检测的操作模式时,这些已建立的模式中的至少一些可以考虑可应用于系绳的各种外力,比如比在与系绳的交互期间除了用户施加的外力之外的外力。特别地,操作模式可以考虑重力、基于有效载荷联接装置的重量的外力和/或基于联接的有效载荷的重量(例如待运输的包裹的重量)的外力等。以这种方式,控制系统能够检测当这种外力与基于用户交互的外力结合应用时所呈现的电动机的操作模式。其他外力也是可能的。
在又一方面,除了上述映射数据之外或代替地,控制系统可以使用一种或多种其他方法来基于电动机的操作模式确定用户交互。
在一种情况下,控制系统可以执行信号处理和/或分析技术以确定信号的值和/或趋势(例如表示电动机速度值的信号)并基于信号的那些值和/或趋势确定用户交互。例如,控制系统可以评估信号的一组条件,以便确定该组内的所有条件是否都被确定为真。如果控制系统确定该组的所有条件都为真,则控制系统可以确定该信号对应于特定的用户交互。否则,控制系统可以评估另一组条件,以便确定该另一组内的所有条件是否都被确定为真,等等。在该方法的示例中,控制系统可以确定信号的斜率是否在特定斜率范围内并且可以确定信号的值是否超过特定阈值时间范围内的特定阈值。并且如果控制系统确定这两个条件都为真,则控制系统可以确定信号对应于特定的用户交互。其他示例也是可能的。
在另一种情况下,控制系统可以执行概率分析技术以确定用户交互。例如,控制系统可以确定检测到的操作模式不精确地匹配映射数据的操作模式之一,因此可以应用概率分析来确定检测到的操作模式以最高可能性匹配的映射数据的操作模式。例如,当确定匹配时,与给予检测到的信号/模式的其他部分的权重相比,控制系统可以对检测到的信号/模式的特定部分给予更高的权重,从而应用附加因子来确定匹配操作模式,从而最终基于映射数据进行用户交互。其他情况和示例也是可能的。
图21接下来示出了指示与系绳的特定用户交互的电动机的示例性操作模式。如图所示,控制系统可以检测上述电流特性2000中的特定电流尖峰2002。为此,控制系统可以检测电流水平随时间的特定增加,随后是电流水平随时间的特定减小。另外或可替代地,控制系统可以通过检测电流水平随时间的特定增加率,然后是电流水平随时间的特定减小率来这样做。在任一情况下,特定电流尖峰2002示出为指示特定用户交互2110,其涉及施加到系绳2102的特定向下力。
更具体地,图21示出了包括绞盘系统2106的UAV2100,其中电动机配置为控制系绳2102的运动。如图所示,用户2108与联接到系绳2102的有效载荷联接装置2104物理地相互作用。在这样做时,用户2108经由有效载荷联接装置2104向系绳2102施加向下力,向下力具有“F1”大小。这样,特定电流尖峰2002指示用户向系绳施加具有“F1”大小的向下力。其他示例也是可能的。
iii.确定电动机响应过程
如上所述,控制系统可以基于检测到的指示与系绳的有意的用户相互作用的电动机的操作模式来确定电动机响应过程并且这样做。在实践中,特定的电动机响应过程可以涉及电动机的一个或多个特定操作,比如将一个或多个特定扭矩施加到系绳上。此外,可以布置电动机响应过程,以便使绞盘系统经由系绳与用户交互和/或通过系绳向用户提供反馈等。
根据本公开,控制系统可以以各种方式确定电动机响应过程。在一种情况下,控制系统可以在其上存储利用相应的电动机响应过程来映射多个操作模式每个的映射数据或者可以以其他方式配置为参考该映射数据。例如,映射数据可以利用涉及电动机施加一个或多个特定扭矩以缠绕系绳的电动机响应过程来映射特定的速度等级序列。这样,控制系统可以通过参考映射数据来确定电动机响应过程,以确定映射到检测到的电动机操作模式的相应电动机响应过程。
在另一种情况下,控制系统可以实际上确定由检测到的电动机操作模式指示的与系绳的特定用户交互,例如通过参考将各种操作模式分别映射到各种相应的用户交互的上述映射数据。然后,控制系统可以使用所确定的特定用户交互作为确定电动机响应过程的基础。
更具体地,控制系统可以在其上存储利用相应的电动机响应过程来映射多个用户交互每个的映射数据或者可以以其他方式配置为参考该映射数据。例如,映射数据可以利用涉及施加特定扭矩以在特定持续时间内展开系绳的响应过程来映射通过用户的系绳的特定侧向运动。这样,控制系统可以通过参考映射数据来确定电动机响应过程,以确定映射到特定用户交互的相应电动机响应过程,其最初是基于将各种操作模式映射到各种相应的用户交互的上述映射数据来确定的。其他情况也是可能的。
在另一方面,除了映射数据之外或代替地,控制系统可以使用一种或多种其他方法来确定电动机响应过程。
在一种情况下,控制系统可以执行信号处理和/或分析技术以确定信号的值和/或趋势(例如表示电动机速度值的信号)并基于信号的那些值和/或趋势确定电动机响应过程。例如,控制系统可以评估信号的一组条件,以便确定该组内的所有条件是否都被确定为真。如果控制系统确定该组的所有条件都为真,则控制系统可以确定该信号对应于特定的电动机响应过程。否则,控制系统可以评估另一组条件,以便确定该另一组内的所有条件是否被确定为真,等等。在该方法的示例中,控制系统可以确定信号是否包括拐点,并且可以确定信号的局部最大值的值是否超过特定阈值。并且如果控制系统确定这两个条件都为真,则控制系统可以确定信号对应于特定的电动机响应过程。其他示例也是可能的。
在另一种情况下,控制系统可以执行概率分析技术以确定电动机响应过程。例如,控制系统可以确定检测到的操作模式不精确地匹配映射数据的操作模式之一,因此可以应用概率分析来确定检测到的操作模式以最高可能性匹配的映射数据的操作模式。例如,当确定匹配时,控制系统可以确定期间检测到操作模式的环境和/或UAV的状态,并且可以使用环境和/或UAV的状态作为附加加重因子用于确定匹配操作模式。以这种方式,一旦控制系统使用概率分析确定匹配的操作模式,控制系统就可以基于映射数据确定电动机响应过程。其他情况和示例也是可能的。
在如上所述布置的系统中,电动机响应过程可以涉及各种电动机响应操作,其中一些在下面描述。实际上,控制系统可以确定电动机响应过程以包括单个这样的电动机响应操作或这些电动机响应操作的任何可行组合。假设确定要执行两个或更多个电动机响应操作,确定电动机响应过程还可以涉及确定执行电动机响应操作的顺序(例如一些电动机响应操作可能在整个顺序的各个点重复)和/或应用每个电动机响应操作的相应持续时间等。通常,可以基于各种因素来确定这样的顺序和/或持续时间,例如基于检测到的电动机的操作模式。可替代地,可以根据建立的映射数据预先确定这样的顺序和/或持续时间。
在任一种情况下,下面描述各种可能的电动机响应操作。尽管描述了某些电动机响应操作,但是在不脱离本公开的范围的情况下,其他电动机响应操作也是可能的。
在一示例中,电动机响应操作可以涉及特定的抵抗操作,其抵抗由于施加到系绳的至少一个外力引起的系绳的展开。作为这种操作的一部分,控制系统可以操作电动机以施加一个或多个特定的反作用扭矩,其中每个抵抗系绳的展开,并且可能在相应的持续时间内施加每个反作用扭矩。具体地,每个这样的反作用扭矩可以处于与施加的外力基本相同的大小,并且可以处于与施加外力的方向有效相反的方向上。以这种方式,该响应操作可以抵抗由于施加外力而引起的系绳的展开,而不一定导致系绳缩回到UAV。在实践中,将外力施加到系绳的用户可以基本上感觉到系绳不能再进一步降低。而且,随着这种反作用扭矩的大小增加,系绳的张力也会增加。
在另一示例中,电动机响应操作可以涉及特定的辅助操作,该辅助操作由于施加到系绳的至少一个外力而有助于系绳的展开。作为这种操作的一部分,控制系统可以操作电动机以施加一个或多个特定的辅助扭矩,其中每个有助于系绳的展开,并且可能在相应的持续时间内施加每个辅助扭矩。具体地,每个这样的辅助扭矩可以在与施加外力的方向有效相同的方向上,并且可以具有任何可行的大小。以这种方式,辅助扭矩可以与施加的外力结合使用,以进一步帮助系绳的展开。在实践中,将外力施加到系绳的用户可以基本上感觉到由于对展开的较小抵抗而使得系绳的手动展开更加容易。
在又一示例中,电动机响应操作可以涉及特定的缩回操作,该缩回操作使系绳抵抗施加到系绳的至少一个外力而缩回。作为这种操作的一部分,控制系统可以操作电动机以施加一个或多个特定的缩回扭矩,其中每个使系绳抵抗外力缩回,并且可能在相应的持续时间内施加每个缩回扭矩。具体地,每个这样的缩回扭矩可以处于大于施加的外力的大小,并且可以在与施加外力的方向有效相反的方向上。以这种方式,该响应操作可以抵抗由于施加的外力引起的系绳的展开,并且实际上致使系绳缩回到UAV,而不管外力如何。在实践中,将外力施加到系绳的用户可以基本上感觉到系绳向用户拉动到系绳缩回的程度,即使用户施加外力也是如此。
在又一示例中,电动机响应操作可以在用户施加外力之后发生而不是在用户施加外力期间。例如,电动机响应操作可以涉及系绳运动操作,该系绳运动操作在外力施加到系绳上之后根据特定的系绳运动曲线移动系绳。在实践中,即使当用户不再与系绳物理地相互作用时,这种电动机响应操作也可以允许执行用户反馈/交互。
在这方面,控制系统可以检测指示特定用户交互的操作模式,然后确定在特定用户交互完成之后要执行的电动机响应过程。特别地,控制系统可以通过检测指示这样的电动机的另一操作模式来确定特定用户交互完成和/或可以以其他方式这样做。在任一种情况下,一旦控制系统确定特定用户交互完成,控制系统就可以执行所确定的电动机响应过程,其涉及根据特定的系绳运动曲线的系绳的运动。
通常,特定的系绳运动曲线可以采用各种形式,并且可以基于指示用户交互的操作模式。例如,系绳运动曲线可以简单地涉及以特定速率将系绳缩回到UAV。在这种情况下,根据该系绳运动曲线的系绳的运动可以基于检测到指示用户连续几次拉下系绳的操作模式而发生。其他实例和示例也是可能的。
图22接下来示出了示例性运动响应过程。如图所示,控制系统确定上述特定用户交互2110对应于电动机响应过程2200。具体地,电动机响应过程2200涉及包括施加反向扭矩的抵抗操作。该反向扭矩可以具有“T1”的大小,该大小与用户2108施加的向下力的大小“F1”基本相同。此外,该反向扭矩可以在与用户2108施加的向下力的方向有效相反的方向上。这样,当用户2108将向下力施加到系绳上时,控制系统可以最终操作绞盘系统2106的电动机以施加该反向扭矩。其他示例也是可能的。
iv.根据确定的电动机响应过程操作电动机
如上所述,一旦确定了电动机响应过程,控制系统然后可以根据确定的电动机响应过程操作电动机,具体地通过向电动机发送一个或多个命令来这样做,该命令指示电动机根据响应过程执行某些操作。并且如上面进一步指出,控制系统可以在用户交互期间和/或之后这样做,这取决于已经确定的电动机响应过程。此外,除了与用户的计划的交互/反馈之外,执行的电动机响应过程可以导致各种结果。
例如,电动机响应过程可以对应于系绳遇到的一个或多个目标张力。具体地,每个目标张力可以是当电动机根据电动机响应过程施加特定扭矩时系绳预期会经历的张力。这样,根据确定的响应过程操作电动机的控制系统可以使系绳遇到一个或多个这样的目标张力。
在另一示例中,电动机响应过程可以对应于系绳遇到的一个或多个目标系绳运动。具体地,每个目标系绳运动可以是当电动机根据电动机响应过程施加特定扭矩时系绳预期会经历的运动。这样,根据所确定的响应过程操作电动机的控制系统可以使系绳遇到一个或多个这样的目标系绳运动(例如行进通过系绳的波脉冲)。其他示例也是可能的。
图23接下来示出了示例性电动机响应过程,其中当用户2108抓住系绳2302时,控制系统操作电动机以控制系绳2102的张力,例如在手动联接有效载荷的过程期间。假设UAV2100在悬停时基本上保持其在空间中的物理位置,控制系统可以随着用户2108提供的向下力增加而在缠绕方向上成比例地(例如线性地)增加电动机的扭矩,反之亦然。以这种方式,系绳2102的张力可以随着用户2108进一步向下拉动系绳2102而增加,反之亦然。此外,控制系统可以配置成将电动机的扭矩成比例地增加到最大扭矩,从而使系绳的张力饱和并且理想地防止用户2108将UAV2100向下拉向地面。
更具体地,在电动机响应过程的状态2302,控制系统操作电动机以施加具有大小“T1”的扭矩以抵消由用户2108提供的力的大小“F”,从而导致系绳2102遇到的第一张力。然后,在电动机响应过程的状态2304,控制系统操作电动机以施加大于“T1”的大小“T2”的扭矩并且这样做以抵消大于“F1”的力大小“F2”,从而导致系绳2102遇到大于第一张力的第二张力。最后,在电动机响应过程的状态2306,控制系统操作电动机以施加仍大于“T2”的大小“T3”的扭矩并且这样做以抵消仍大于“F2”的力大小“F3”,从而导致系绳2302遇到仍大于第二张力的第三张力。
图24接下来示出了示例性电动机响应过程,其中控制系统可以操作电动机以改变随时间的施加到系绳2102的扭矩的量和可能的方向,具体地这样做以增强用户体验或其他原因。例如,控制系统可以操作电动机以在用户2108向下拉动系绳2102时复制制动或咔哒声的感觉,和/或通过系绳2102提供振动反馈(例如波脉冲)等。
更具体地,在电动机响应过程的状态2402,控制系统操作电动机以施加具有大小“T1”并且与用户2108提供的力在相同方向上的辅助扭矩,从而帮助用户2108展开系绳2102。然后,在电动机响应过程的状态2404处展开系绳2102期间,控制系统操作电动机以施加具有大小“T2”的反作用扭矩以抵消由用户2108提供的力的大小“F2”,从而导致用户2108体验到“制动”的感觉。最后,在电动机响应过程的状态2406,控制系统再次操作电动机以应用辅助扭矩,以便继续帮助用户2108展开系绳2102。具体地,该另外的辅助力示出为具有大小“T3”并且设置在与由用户2108提供的力(具有大小F3”)相同的方向上。
图25接下来示出了示例性电动机响应过程,其中控制系统解释用户2108与系绳2102的交互以确定用户2108的意图是使UAV2100和/或绞盘系统2106的电动机执行某些操作。具体地,在电动机响应过程的状态2502,控制系统检测到操作模式,该操作模式指示用户2108以基本具有大小“F1”的力至少连续三次拉下系绳2102。在检测到用户2108这样的手势时,控制系统可以将手势解释为有效载荷已经从有效载荷联接装置2104正确地分离的信号,因此UAV2100可以继续进一步飞行到目标目的地。通常,为了便于这样的手势,可以向用户提供列出所公开的系统可解释的各种手势的手册等。
更具体地,如电动机响应过程的状态2504所示,控制系统通过执行电动机响应过程来响应手势,该电动机响应过程涉及操作电动机以施加具有大小“T2”的扭矩以用于将系绳2102缩回到UAV2100的目的。此外,一旦用户2108完成与系绳2102的交互并因此不再向系绳2102施加外力,控制系统就这样做。最后,一旦系绳2102已经缩回,UAV2100就可以继续向前飞行到目标目的地,如状态2506所示。其他示例也是可能的。
v.用户交互和反馈的附加特征
在另一方面,控制系统可以考虑其他因素作为确定运动响应过程的基础。在实践中,除考虑如上所述的检测到的电动机的操作模式之外或代替地,控制系统还可以考虑这些因素。此外,控制系统可以考虑这些因素的任何可行组合,可能使某些因素与其他因素相比更加重要。
在一种情况下,控制系统可以将环境状态视为用于确定电动机响应过程的基础。具体地,控制系统可以从UAV的一个或多个传感器(例如图像捕获设备)接收表示UAV的环境状态的传感器数据,例如UAV附近的障碍物等。然后,控制系统可以至少基于该传感器数据确定电动机响应过程。例如,如果控制系统在距离系绳的阈值距离内检测到障碍物,则控制系统可响应地选择电动机响应过程,其中系绳遇到较小的目标系绳运动而不是较大的目标系绳运动,从而试图避免与障碍物碰撞。
在另一种情况下,控制系统可以将UAV的飞行状态视为确定电动机响应过程的基础。具体地,控制系统可以从飞行管理系统(例如在UAV上和/或在UAV外部)接收表示UAV的飞行状态的飞行数据,其可以是UAV沿计划飞行路径的飞行进度等。然后,控制系统可以至少基于该飞行数据确定电动机响应过程。例如,如果控制系统确定UAV的飞行进度明显落后于沿着飞行路径的计划时间表,则控制系统可以响应地选择电动机响应过程,其中电动机开始在一定程度上缩回系绳,从而向用户表明UAV的飞行进度明显落后于计划的时间表。其他情况和示例也是可能的。
在又一方面,控制系统可以执行所公开的方法1900,其基于有效载荷(例如有效载荷联接装置和/或联接的有效载荷)处于有效载荷高度,在该有效载荷高度处预期用户交互。更具体地,控制系统可以确定有效载荷的有效载荷高度,并且可以确定有效载荷高度是预期用户交互的高度。一旦控制系统做出该确定,控制系统然后可以响应地执行方法1900,例如当实际检测到用户交互时。
通常,控制系统可以使用各种技术来确定有效载荷高度。在一示例中,高度传感器可以联接到有效载荷(例如有效载荷联接装置),并且控制传感器可以从高度传感器接收指示有效载荷高度的高度数据。在另一示例中,控制系统可以确定系绳的展开长度,例如通过使用本文所述的技术。而且,控制系统可以基于从UAV的高度传感器接收的高度数据确定飞行高度等。然后,控制系统可以使用所确定的系绳的展开的系绳长度以及所确定的飞行高度作为用于确定有效载荷高度的基础。例如,控制系统可以从所确定的飞行高度(例如地面以上11英尺)减去所确定的系绳的展开的系绳长度(例如5英尺),以便确定有效载荷高度(例如地面以上6英尺)。
此外,控制系统可以采用各种方法来确定有效载荷高度是预期用户交互的高度。例如,控制系统可以确定有效载荷高度小于阈值高度(例如通过手动工程输入建立)。在实践中,阈值高度可以是地面以上的高度,在该高度处,用户可以可行地到达有效载荷并因此与系绳交互。其他情况也是可能的。
在又一方面,控制系统可以根据UAV响应过程来操作UAV本身,该UAV响应过程可以至少涉及UAV的特定运动。在实践中,特定运动可以采取任何可行的形式。例如,特定运动可以涉及UAV沿物理空间中的轴的侧向运动。在另一示例中,特定运动可以涉及沿着飞行路径启动向前飞行,例如如图25的状态2506所示。其他示例也是可能的通常,除了根据确定的电动机响应过程操作电动机之外或代替地,控制系统可以根据UAV响应过程操作UAV。并且如果控制系统除了根据电动机响应过程操作电动机之外也这样做,则控制系统可以分别操作电动机和UAV,以同时和/或在不同时间执行这些过程。此外,控制系统可以在用户交互之后和/或期间根据UAV响应过程操作UAV。
此外,控制系统可以基于各种因素确定UAV响应过程。在这样做时,控制系统可以考虑这些因素的任何可行组合,与其他因素相比可能对某些因素给予更多权重。尽管如此,各种因素都是可能的。
在一示例中,控制系统可以基于检测到的电动机的操作模式来确定UAV响应过程。例如,控制系统可以在其上存储利用相应的UAV响应过程来映射多个操作模式每个的映射数据,或者可以以其他方式配置成参考该映射数据。例如,映射数据可以利用UAV响应过程来映射电流水平的特定序列,该UAV响应过程涉及操作UAV以在一定程度上和在某个方向上倾斜。这样,控制系统可以通过参考映射数据来确定UAV响应过程,以确定映射到检测到的电动机的操作模式的相应UAV响应过程。
在另一示例中,控制系统可以基于UAV的环境状态和/或基于UAV的飞行状态来确定UAV响应过程。例如,如果控制系统确定UAV的飞行状态涉及UAV悬停在地面上的第一位置并且UAV的环境状态包括物理指向地面上的第二位置的用户,那么UAV响应该过程可以涉及UAV在悬停飞行中飞行以便最终悬停在第二位置,例如用于在第二位置处递送有效载荷的目的。其他示例和方面也是可能的。
注意,与用户交互/反馈相关的上述特征不限于UAV悬停的情况,并且可以在不脱离本公开的范围的情况下在各种情况下执行。例如,各种特征可以在UAV已经落在壁架上并且系绳已经至少部分地展开以使得系绳被UAV悬挂在壁架的边缘上的情况下执行。其他示例也是可能的。
X.递送后的系绳控制
A.释放验证
如上所述,当UAV通过控制电动机以展开联接到有效载荷的系绳来将有效载荷降低到地面时,UAV的控制系统可以监测电动机的电流和/或线轴的旋转来验证有效载荷已到达地面。然后,控制系统可以通过继续从线轴展开系绳来操作电动机以引起系绳的过延伸。一旦验证了有效载荷的触地并且执行了系绳过延伸,则控制系统可以在释放验证模式下操作,以便在开始将有效载荷联接装置提升回到UAV的过程之前验证有效载荷与有效载荷联接装置的分离。
图26是示出根据示例实施例的释放验证方法2600的流程图。方法2600可以在方法1800完成时(例如在系绳过延伸期结束时)启动,作为释放验证模式中的操作的一部分。
如图所示,方法2600涉及控制系统在释放验证时段内以第一模式操作电动机(其中施加扭矩以抵抗系绳上的重力拉力),如方框2602所示。在实践中,控制系统可以应用设计成用于释放验证的速度曲线。可以设计速度曲线,以便在释放验证时段期间将有效载荷联接装置的特定重量提升一小段距离。因此,如果有效载荷尚未释放,则电动机将汲取更多电流以跟随该速度曲线,而不是当有效载荷已从有效载荷联接装置正确释放时其这么做。因此,至少部分地基于释放验证时段期间的电动机电流,控制系统可以确定有效载荷与有效载荷联接装置分离,如方框2604所示。例如,控制系统可以通过确定释放验证时段期间的电动机电流低于阈值电流达至少阈值时间量来确定有效载荷与有效载荷联接装置分离。并且,响应于该确定,控制系统可以操作电动机以缩回系绳,如方框2606所示。
另一方面,如果在释放验证时段期间的电动机电流足够大,则控制系统可以确定有效载荷尚未与有效载荷联接装置分离,并且可以重复操作电动机的过程以引起系绳的过延伸(此时也许是一些预定的额外长度),然后在系绳上向上拉以测试有效载荷分离,如方框1808和2602至2606所示。
B.系绳缩回过程
一旦已经验证了有效载荷的释放(例如通过执行方法2600),控制系统可以切换到缩回模式,以便缩回系绳以将有效载荷联接装置提升回到UAV。
在缩回模式中,有效载荷联接装置的上升可以分为两个阶段:初始上升阶段和最终上升阶段。
在初始上升期间,控制系统可以实现预定的上升速率曲线,其可以考虑到旁观者和/或周围结构的安全性而设计。在初始上升完成之后(例如一旦已经缠绕一定长度的系绳),控制系统可以暂停缩回过程,例如通过操作电动机以维持基本恒定长度的展开的系绳。
由于从系绳悬挂的重量减少(例如仅有效载荷联接装置的重量),一旦有效载荷被释放,有效载荷联接装置可能更容易来回摆动。因此,在缩回过程中的暂停期间,控制系统可评估有效载荷联接装置是否振荡(例如像钟摆一样)和/或确定振荡的大小,并且可评估是否应采取措施来抑制振荡。在这样的阻尼过程之后或期间,控制系统可以启动有效载荷联接装置的最终上升,其中系绳完全缩回以将有效载荷联接装置拉到UAV,并且将有效载荷联接装置安置在UAV的插座中用于飞回到返回位置。
参考下面的图38A-38C,提供了关于在递送之后缩回系绳和有效载荷联接装置的更多细节。
XI.抑制有效载荷的振荡
在实践中,UAV有时可能遇到系绳至少部分展开并且联接到系绳的悬挂的有效载荷易于振荡的情况。在这种情况的一示例中,UAV可以展开系绳以递送联接的有效载荷,从而使联接的有效载荷易于振荡。在这种情况的另一示例中,UAV可以展开系绳以拾取有效载荷,从而使有效载荷联接装置(例如在这种情况下被认为是有效载荷)易于振荡。在这种情况的又一示例中,UAV可以在有效载荷的联接以拾取之后缩回系绳,从而使联接的有效载荷易于振荡。在这种情况的又一示例中,UAV可以在递送之后释放有效载荷之后缩回系绳,从而使有效载荷联接装置(例如在这种情况下再次被认为是有效载荷)易于振荡。其他示例也是可能的。
在这种情况下,各种因素可能导致悬挂的有效载荷的振荡。在一示例中,足够强的风况可能导致有效载荷振荡。在另一示例中,UAV在悬停模式下保持其位置的移动可以使有效载荷振荡。并且在又一示例中,有效载荷的振荡可以是由用户施加到系绳和/或有效载荷本身的外力的结果。其他示例也是可能的。
通常,有效载荷的振荡可以使有效载荷以钟摆式运动来回移动,也称为摆动运动。实际上,振荡有效载荷的摆动运动可能会产生各种后果。例如,振荡有效载荷的摆动运动可能对UAV的稳定性具有不期望的影响,可能难以将有效载荷定位在地面上的期望位置,可能在地面附近产生不期望的有效载荷移动,或者将有效载荷联接装置安置在UAV的插座中可能会造成困难等。
为了解决这些问题,UAV的控制系统可以执行一种或多种阻尼技术,例如下面描述的那些。如上所述,在系绳缩回过程中的暂停期间,可以在递送有效载荷之后执行这种阻尼技术。然而,应该理解的是,下面描述的阻尼技术也可以应用于其他情况。此外,这里描述的阻尼技术可以应用于有效载荷仍附接到有效载荷联接装置的情况(可能需要进行一些调整以考虑与仅附接有效载荷联接装置时相比,增加的重量悬挂在系绳上)。更一般地,本文公开的阻尼技术可以应用于系绳悬挂来自飞行器的重物的任何情况。
A.有效载荷振荡的检测和评估
在示例实施方式中,UAV可以包括一个或多个传感器,其布置成生成指示悬挂在UAV下方的有效载荷联接装置(和/或联接的有效载荷)的振荡的传感器数据。实际上,这些传感器可以包括联接到绞盘电动机的电流传感器、系绳上的张力传感器、UAV上和/或有效载荷联接装置上的惯性测量单元(IMU)、UAV上的图像捕获设备和/或绞盘电动机上的编码器等。因此,UAV的控制系统可以使用来自这些传感器的任何组合的传感器数据,以便检测有效载荷的振荡以及振荡的属性,比如幅度、频率和/或振荡速度等。
在一种情况下,电流传感器可以产生表示电流、电动机特性的数据。控制系统可以接收这样的电流数据,并且可以使用电流数据作为检测有效载荷的振荡以及用于确定那些检测到的振荡的属性的基础。为此,控制系统可以参考利用有效载荷振荡的指示和/或有效载荷振荡的相应属性来映射各种电流特性每个的映射数据等。例如,可以将一组特定的电流特性(例如电流值的特定相对变化)映射到有效载荷振荡的指示。而且,另一组特定的电流特性(例如电流值的特定变化率)可被映射到有效载荷以特定振荡幅度振荡的指示。
在另一种情况下,张力传感器可以产生表示系绳张力的张力数据。控制系统可以接收这样的张力数据,并且可以使用张力数据作为检测有效载荷的振荡以及用于确定那些检测到的振荡的属性的基础。为此,控制系统可以参考利用有效载荷振荡的指示和/或有效载荷振荡的相应属性来映射各种系绳张力特性每个的映射数据等。例如,一组特定的系绳张力特性(例如张力的特定相对变化)可被映射到有效载荷振荡的指示。而且,另一组特定的系绳张力特性(例如特定的张力变化率)可被映射到有效载荷以特定速度振荡的指示。
在又一种情况下,IMU可以生成指示有效载荷相对于飞行器的移动的移动数据。控制系统可以接收这样的移动数据,并且可以使用移动数据作为检测有效载荷的振荡以及用于确定那些检测到的振荡的属性的基础。为此,控制系统可以参考利用有效载荷振荡的指示和/或有效载荷振荡的相应属性来映射各种移动数据特性每个的映射数据等。例如,一组特定的移动数据特性可被映射到有效载荷振荡的指示。而且,另一组特定的运动数据热性(例如指示特定力的移动数据)可被映射到有效载荷以特定振荡幅度振荡的指示。
在又一种情况下,图像捕获设备可以布置为面向有效载荷,从而提供表示有效载荷相对于UAV的位置的图像数据。利用这种布置,控制系统可以接收图像数据,并且可以使用任何当前已知和/或未来开发的图像处理技术来评估图像数据。在这样做时,控制系统可以使用图像数据来确定有效载荷随时间的位置。更具体地,控制系统可以通过确定有效载荷随时间的位置差来检测有效载荷的振荡。此外,控制系统可以使用图像数据作为确定检测到的振荡的属性的基础。例如,控制系统可以确定随时间的某些有效载荷位置之间的差异,然后基于所确定的差异确定振荡幅度。在另一示例中,控制系统可以使用图像数据来确定有效载荷的位置的变化率,然后基于所确定的变化率来确定振荡速度。其他情况和示例也是可能的。
此外,有效载荷振荡的各种属性可取决于系绳展开的程度。例如,与展开的系绳长度较长时有效载荷摆动的频率相比,较短的展开的系绳长度可导致有效载荷以较高的频率摆动。出于这个原因,当确定有效载荷振荡的属性时,控制系统可以考虑展开的系绳长度作为附加因素。例如,在确定系绳以特定长度展开之后,控制系统可确定有效载荷随时间的位置。然后,控制系统可以参考将确定的系绳的展开长度和确定的位置的组合映射到特定的振荡幅度和特定的振荡频率的映射数据。可替代地,控制系统可以基于预定公式确定这样的属性,该预定公式输入变量例如展开的系绳长度和确定的位置并且输出指示一个或多个上述属性的数据。其他示例也是可能的。
在实践中,控制系统可以通过从编码器接收表示系绳的展开长度的位置数据来确定展开的系绳长度。更具体地,编码器可以联接到电动机,使得当电动机执行旋转以展开和/或缠绕系绳时,编码器生成表示电动机的角位置和/或运动的数据(例如电动机的传动组件)。这样,控制系统可以接收数据,并且可以使用该数据作为跟踪系绳的展开长度的基础。例如,控制系统可以基于来自编码器的数据在特定方向上检测电动机的两次旋转,并且可以确定这两次旋转对应于系绳展开两米。其他示例也是可能的。
在另一方面,控制系统还可以使用传感器数据作为确定检测到的振荡超过阈值(例如通过手动工程输入建立)的基础。例如,控制系统可以确定传感器数据指示有效载荷的振荡的特定幅度,并且可以确定特定幅度高于阈值幅度。在另一示例中,控制系统传感器数据指示有效载荷的振荡的特定速度,例如有效载荷在系绳部分展开时来回摆动的速度。在该示例中,控制系统然后可以确定该特定速度高于阈值速度。在又一示例中,控制系统传感器数据指示有效载荷的振荡的特定频率,例如有效载荷在系绳部分展开时来回摆动的频率。在该示例中,控制系统然后可以确定该特定频率高于阈值频率。其他示例也是可能的。
B.系绳缩回过程中的阻尼
图27是示出根据示例实施例的用于启动阻尼例程(在本文中还可以称为阻尼技术)的方法2700的流程图。方法2700可以在系绳缩回过程期间由UAV的控制系统实施。在实践中,系绳缩回过程可以在递送之后和/或在拾取和/或递送期间的其他时间进行。此外,尽管方法2700描述为在有效载荷联接装置的环境中执行,但是方法2700也可以在联接到有效载荷联接装置的有效载荷的环境中执行。
转向方法2700,UAV最初可以在悬停飞行模式下操作,如方框2702所示。例如,UAV可以悬停在目标或递送位置上,或者在源位置上。一旦有效载荷在地面上释放,UAV的控制系统可以切换到系绳缩回模式,如方框2702所示。当在系绳缩回模式下操作时,控制系统可以执行阻尼例程以抑制有效载荷联接装置的振荡,如方框2704所示。可选地,控制系统可以具体地响应于确定检测到的振荡超过阈值而这样做。
通常,控制系统执行的阻尼例程可以是这里描述的阻尼例程的任何组合。然而,在一些情况下,控制系统可以执行除了本文描述的那些之外的一个或多个阻尼例程,并且在不脱离方法2700的范围的情况下这样做。
如上所述,可以在上升过程中的暂停期间(并且可能在暂停期间同时还降低有效载荷联接装置)执行诸如在方框2704处执行的阻尼例程。在一些实施例中,控制系统可以等待直到振荡被充分抑制,然后恢复缩回(或降低)系绳的过程。例如,控制系统可以暂停直到它确定振荡的幅度小于阈值幅度,或者可能甚至有效载荷联接装置处于平衡位置。在任一情况下,控制系统可响应地恢复系绳的缩回以将有效载荷联接装置提升到UAV。然而,在其他实施例中,控制系统可以不等待直到振荡被充分抑制,然后恢复缩回(或降低)系绳的过程。例如,控制系统可以在恢复之前将系绳缩回过程暂停一段固定的时间。具体地,在开始执行阻尼例程时,控制系统可以启动计时器,该计时器布置成在特定持续时间(例如通过手动工程输入建立)之后期满,并且可以响应于检测到该计时器的期满而恢复缩回(或降低)系绳的过程。其他示例也是可能的。
图28A至28D接下来共同示出了在系绳缩回过程期间启动阻尼例程。
如图28A所示,UAV2800包括系绳2802和联接到系绳2802的有效载荷联接装置2804。此外,有效载荷2806示出为由UAV2800在地面上的递送位置处递送。此外,图28A示出了UAV2800悬停在递送位置上,而UAV的控制系统在系绳缩回模式下操作,以在递送有效载荷2806之后将有效载荷联接装置2804上升回到UAV。
如图28B所示,当在系绳缩回模式下操作时,UAV的控制系统暂停有效载荷联接装置2804的上升。在暂停期间,控制系统执行阻尼例程,如图28B所示。如上所述,阻尼例程可以是本文所述的任何阻尼例程等。可选地,如所指出的,控制系统响应于检测到有效载荷联接装置2804的振荡处于大于阈值幅度的振荡幅度2808而执行阻尼例程。
如图28C所示,虽然UAV的控制系统仍然暂停有效载荷联接装置2804的上升,但是由于阻尼例程,振荡示出为已被抑制。在一种情况下,在暂停期间和在执行阻尼例程一段时间之后,控制系统检测到有效载荷联接装置2804的振荡处于低于阈值幅度的振荡幅度2810。以这种方式,控制系统确定振荡已被充分抑制并且响应地确定系绳缩回过程可以恢复。在另一种情况下,控制系统检测在阻尼例程的停止执行时启动的计时器的期满,并且确定系绳缩回过程可以响应于检测到该计时器的期满而恢复。这样,在任一种情况下,控制系统可响应地在系绳缩回模式下恢复操作,以在递送有效载荷之后将有效载荷联接装置2804上升回到UAV2800,如图28D所示。其他说明也是可能的。
C.示例阻尼技术
尽管下面描述了几种阻尼技术,但是应当理解,在不脱离本公开的范围的情况下,对所描述的技术的其他阻尼技术和修改也是可能的。
i.向前飞行以抑制振荡
图29是示出用于启动向前飞行以抑制振荡的方法2900的流程图。如上所述,UAV可以配置为根据悬停飞行模式并根据向前飞行模式飞行。在悬停飞行模式中,飞行动力学可能类似于直升机。更具体地,升力和推力可以由旋翼提供,该旋翼允许UAV垂直起飞和降落并且在所有方向上飞行。然而,在向前飞行模式中,飞行动力学可能类似于飞机。更具体地,固定翼UAV可以通过来自喷气发动机或螺旋桨的推力向前推进,其中UAV的固定翼提供提升并允许UAV相对于地面基本水平地滑动。
通过这种布置,UAV可以根据悬停飞行模式操作,如方框2902所示。如所指出,UAV可以在展开系绳用于有效载荷拾取和/或有效载荷递送的过程期间这样做,或者可以在缩回系绳用于有效载荷拾取和/或有效载荷递送的过程期间这样做。无论如何,当UAV处于悬停飞行模式时,UAV的控制系统可以使UAV从悬停飞行模式切换到向前飞行模式,如方框2904所示。
可选地,控制系统可以响应于确定检测到的振荡超过阈值而这样做。而且,所讨论的有效载荷可被认为是联接到有效载荷联接装置的有效载荷(例如包裹),或者可被认为是有效载荷联接装置本身等。
更具体地,通过切换到向前飞行模式,UAV的移动可能导致对有效载荷的阻力。通常,阻力被认为是空气动力或摩擦,其由于物体和空气分子之间的相互作用而抵抗或阻碍物体通过空气的运动。因此,在向前飞行场景中,气流可能导致沿着与向前飞行方向相反的方向引导的阻力。因此,所产生的阻力可以抑制检测到的有效载荷的振荡,因为气流可以帮助稳定有效载荷。
此外,在一些实施例中,当控制系统使UAV切换到向前飞行模式时,控制系统还可以指示UAV以具有某些飞行特性的向前飞行模式操作。在实践中,这些飞行特性可以包括飞行速度、飞行方向和/或飞行正时等。这样,控制系统可以基于各种因素确定适当的飞行特性。并且根据本公开,控制系统可以至少基于检测到的有效载荷的振荡和/或基于其他因素来确定适当的飞行特性。
作为示例,控制系统可以至少基于检测到的振荡来确定向前飞行模式的初始飞行速度。在实践中,初始飞行速度可以是在切换到向前飞行模式之后UAV最初立即加速到的飞行速度以及UAV最终在向前飞行模式期间保持至少一段时间的飞行速度。因此根据本公开,控制系统可以确定当检测到的振荡的幅度更大时通常更高的初始飞行速度。例如,控制系统可以在控制系统检测到有效载荷的第一振荡幅度时选择第一初始飞行速度,并且可以在控制系统检测到有效载荷的第二振荡幅度时选择第二初始飞行速度,其中第一幅度高于第二幅度且第一初始飞行速度高于第二初始飞行速度。注意,初始飞行速度可以另外或替代地取决于有效载荷的质量和/或阻力,或者可以简单地通过手动工程输入等预定义。
在另一示例中,控制系统可至少基于检测到的振荡来确定向前飞行模式的飞行正时。特别地,确定飞行正时可以包括确定启动向前飞行模式的时间、作为向前飞行模式的一部分执行抑制的持续时间和/或结束向前飞行模式的时间等。在任一种情况下,控制系统可以考虑与检测到的振荡有关的各种因素作为确定飞行正时的基础。例如,控制系统可以确定有效载荷摆动的状态,例如有效载荷是否在摆动的顶部或摆动的底部,并且使用所确定的有效载荷摆动状态作为确定飞行正时的基础。在另一实例中,控制系统可以确定有效载荷振荡的范围(例如幅度),并且可以基于所确定的范围来确定飞行正时。注意,可替代地,可以通过手动工程输入等预定义飞行正时。其他实例和示例也是可能的。
在另一方面,控制系统可以在各种情况下帮助促进向前飞行阻尼例程。在一示例情况下,控制系统可以在缩回系绳用于有效载荷拾取和/或有效载荷递送的过程期间启动向前飞行以抑制振荡。在该示例情况下,控制系统可以在缩回过程的任何点处技术上启动向前飞行,比如在缩回过程中没有暂停。然而,理想地,控制系统可以操作电动机以在检测到的振荡超过阈值时暂停系绳的缩回,这可以允许控制系统在缩回过程中的暂停期间启动向前飞行模式。然后,一旦控制系统检测到有效载荷的振荡已经被阻力充分抑制(例如检测到的振荡不再超过阈值)和/或在固定的时间延迟之后(例如响应于检测到计时器的期满),控制系统则可以操作电动机以恢复系绳的缩回。
在另一示例情况下,控制系统可以在展开系绳用于有效载荷拾取和/或有效载荷递送的过程期间启动向前飞行以抑制振荡。在该示例情况下,控制系统可以在展开过程的任何点处技术上启动向前飞行,例如在展开过程中没有暂停。然而,理想地,控制系统可以操作电动机以在检测到的振荡超过阈值时暂停系绳的展开,这可以允许控制系统在展开过程中的暂停期间启动向前飞行模式。然后,一旦控制系统检测到有效载荷的振荡已被阻力充分抑制和/或在固定的时间延迟之后(例如响应于检测到计时器的期满),控制系统则可以操作电动机以恢复系绳的展开。各种其他示例情况也是可能的。
此外,当控制系统操作电动机以恢复系绳的展开或缩回时,控制系统理想地可以在UAV以向前飞行模式操作时这样做,但是也可以在UAV以悬停飞行模式操作时这样做。
例如,一旦控制系统检测到有效载荷的振荡已被阻力充分抑制和/或在固定的时间延迟之后,随着控制系统也使UAV继续在向前飞行模式下操作,控制系统可响应地操作电动机以展开或缩回系绳。而且,例如在缩回的情况下,控制系统可以指示UAV在系绳缩回时保持特定的向前飞行速度(例如确定的初始飞行速度)。以这种方式,控制系统可以确保系绳的安全且稳定的缩回。然后,一旦控制系统确定该系绳缩回完成,控制系统然后可响应地改变(例如增加)向前飞行速度,如果适用的话。
另外或可替代地,一旦系绳完全缩回,控制系统然后可以使UAV从向前飞行模式切换回悬停飞行模式。在这方面,在UAV切换回悬停飞行模式之后,控制系统然后可以操作电动机以展开系绳。以这种方式,向前飞行可以抑制有效载荷的振荡,并且随后的悬停飞行可以允许在特定位置上进行系绳展开,例如用于有效载荷拾取或递送目的。其他示例也是可能的。
在另一方面,控制系统可以执行方法2900,条件是有效载荷处于远离UAV的安全距离处。通常,控制系统可以这样做以确保有效载荷在开始向前飞行时不与UAV碰撞和/或可以出于其他原因这样做。尽管如此,控制系统可以以各种方式这样做。例如,控制系统可以确定系绳的展开长度,然后可以确定系绳的展开长度高于阈值长度,从而向控制系统指示有效载荷处于远离UAV的相对安全距离处。以这种方式,如果控制系统试图执行方法2900,则控制系统可以仅在控制系统确定系绳的展开长度高于阈值长度时才这样做。其他示例也是可能的。
图30A至30D共同示出了涉及向前飞行以抑制振荡的技术,特别是在系绳缩回过程期间这样做。
如图30A所示,UAV3000包括系绳3002和联接到系绳3002的有效载荷联接装置3004。此外,有效载荷3006被示为已经由UAV3000在地面上的递送位置处递送。此外,图30A示出了UAV3000悬停在递送位置上,而UAV的控制系统以系绳缩回模式操作,以在递送有效载荷3006之后将有效载荷联接装置3004上升回到UAV。
如图30B所示,当UAV3000处于悬停飞行模式时,UAV的控制系统暂停有效载荷联接装置3004的上升。在暂停期间,控制系统可以可选地检测到系绳3002的展开长度3010大于阈值长度。而且,控制系统可以可选地检测到有效载荷联接装置3004的振荡处于大于阈值幅度的振荡幅度3008。在这方面,控制系统然后可以响应地执行向前飞行阻尼例程,如图30C所示。特别地,虽然UAV的控制系统仍然暂停有效载荷联接装置3004的上升,但是UAV3000响应地从悬停飞行模式操作切换到向前飞行模式操作。然而,在其他情况下,控制系统可能不检测振荡并且可以简单地执行向前飞行阻尼例程一段固定的时间(例如直到检测到计时器的期满)。
如图30C所示,通过切换到向前飞行模式,UAV3000的移动导致有效载荷联接装置3004上的阻力,这抑制了有效载荷联接装置3004的振荡。因此,在暂停期间和在UAV进行向前飞行一段时间之后,控制系统检测到有效载荷联接装置3004的振荡处于低于阈值幅度的振荡幅度3012。这样,控制系统确定振荡具有已被充分抑制并且响应地确定系绳缩回过程可以恢复。
如图30D所示,响应于确定振荡已被充分抑制和/或响应于检测到计时器的期满,控制系统然后在系绳缩回模式下恢复操作以在递送有效载荷之后使有效载荷联接装置3004上升回到UAV3000。此外,控制系统示出为在系绳缩回模式下恢复操作,因为控制系统继续指示UAV3000以向前飞行模式操作。其他说明也是可能的。
ii.减少飞行稳定程度以抑制振荡
根据示例实施方式,UAV可以在位置保持模式下操作,其中UAV在悬停飞行期间基本上保持物理空间中的物理位置。通常,UAV可以通过在悬停飞行期间参与一种或多种飞行稳定技术(例如基于视觉的稳定和/或基于IMU的稳定)这样做,例如当前已知的稳定技术和/或未来开发的稳定技术。
具体地,UAV可以沿物理空间中的三个维度参与飞行稳定,以便抵抗UAV沿着这三个维度中的任何一个的移动,从而有助于维持UAV的物理位置。在实践中,所讨论的三个维度可以是UAV的偏航轴、UAV的俯仰轴和UAV的横滚轴。另外或可替代地,三个维度可以包括用于UAV的任何可行的平移轴(例如UAV的平移运动可以沿着的任何轴)。但是,在不脱离本公开的范围的情况下,三个维度也可以采用各种其他形式。
图31是示出用于减小飞行稳定程度(例如增益)以抑制振荡(“跛行”阻尼技术)的方法3100的流程图。如方法3100的方框3102所示,UAV可以在位置保持模式下操作。同样,UAV可以在展开系绳用于有效载荷拾取和/或有效载荷递送的过程期间这样做,或者可以在缩回系绳用于有效载荷拾取和/或有效载荷递送的过程期间这样做。无论如何,当UAV处于位置保持模式时,UAV的控制系统可以沿着至少一个维度减小飞行稳定程度,如方框3104所示。可选地,控制系统可以响应于确定检测到的振荡超过上述阈值而这样做。而且,如所指出,所讨论的有效载荷可被认为是与有效载荷联接装置联接的有效载荷(例如包裹),或者可被认为是有效载荷联接装置本身等。
更具体地,“跛行”阻尼技术可以涉及控制系统使得UAV沿着上述三个维度中的至少一个降低飞行稳定程度。通过这样做,UAV然后可以基于对UAV施加外力而沿着该维度移动(例如沿着轴的平移运动)。实际上,这些外力可能是有效载荷振荡的结果。并且当这些有效载荷振荡导致UAV沿着所讨论的至少一个维度移动时,能量可能随时间耗散,从而导致由于该能量耗散而抑制检测到的振荡。
根据本公开,沿着至少一个维度减小飞行稳定程度的动作可以采取各种形式。
在一种情况下,沿着至少一个维度减小飞行稳定程度可以采取完全消除沿该维度的任何形式的稳定的形式,从而允许UAV严格地基于对UAV施加外力而沿着该维度移动。例如,摆动有效载荷可以沿着特定轴向UAV施加外力,并且由于UAV减小沿着特定轴的稳定,UAV可能最终沿着特定轴移动一定量,该量基于该外力的大小。以这种方式,摆动有效载荷可以基本上沿着特定轴拖动UAV本身。其他示例也是可能的。
然而,在另一种情况下,沿着至少一个维度减小飞行稳定程度可以采取沿着至少一个维度将稳定程度减小一定程度的形式。具体地,控制系统可以允许UAV基于对UAV施加外力而沿着至少一个维度移动,但是仅在一定程度上这样做。例如,在检测到UAV相对于上述物理位置沿着至少一个维度移动一定程度之后,UAV可以参与飞行稳定。以这种方式,控制系统可以有效地允许UAV相对于物理位置沿着至少一个维度移动一些范围(例如UAV在每个方向上沿着特定轴达到两米的平移运动)而不是UAV试图通过阻止UAV远离该物理位置的任何运动来维持UAV的物理位置。
此外,当确定沿着至少一个维度减少稳定的程度时,控制系统可以考虑各种因素。在示例实施方式中,控制系统可以使用检测到的振荡作为确定目标稳定程度的基础。在这样做时,当检测到的振荡的幅度较大时,控制系统可以确定较小的目标稳定程度,从而允许UAV沿着至少一个维度更大的移动,以便帮助耗散能量。并且由于UAV的这种更大的移动,更高幅度的振荡可能最终抑制。其他情况和示例也是可能的。
在沿着至少一个维度减小飞行稳定之后,控制系统可以检测到有效载荷的振荡已被充分抑制和/或可以检测计时器的期满(例如在“跛行”开始时启动“阻尼例程”,并且可以响应地使飞行器沿着至少一个维度增加飞行稳定程度。根据本公开,这种飞行稳定的增加可以采取各种形式。
在一示例中,假设控制系统使UAV完全消除沿该维度的任何形式的稳定,控制系统可以使UAV沿该维度完全激活稳定,以试图完全保持UAV的物理位置。在另一示例中,再次假设控制系统使UAV完全消除沿该维度的任何形式的稳定,控制系统可以通过有效地允许UAV相对于物理位置沿着至少一个维度的一些运动范围来使UAV沿着该维度增加稳定程度。在又一示例中,假设控制系统使UAV沿着至少一个维度部分地减小稳定程度,控制系统可以使UAV沿着该维度增加稳定程度。在该示例中,控制系统可以使UAV增加稳定程度(例如在减小之前达到相同程度),以便有效地减小UAV相对于物理位置沿着至少一个维度所允许的移动范围。可替代地,控制系统可以使UAV增加稳定程度,以便沿着该维度完全激活稳定,以试图完全保持UAV的物理位置。各种其他示例也是可能的
在另一方面,控制系统可以在各种情况下帮助促进“跛行”阻尼技术。在一种示例情况下,控制系统可以在缩回系绳用于有效载荷拾取和/或有效载荷递送的过程期间启动“跛行”阻尼技术。在该示例情况下,控制系统可以在缩回过程的任何点处技术上启动“跛行”阻尼技术,例如在缩回过程中没有暂停。然而,理想地,控制系统可以操作电动机以在检测到的振荡超过阈值时暂停系绳的缩回,这可以允许控制系统在缩回过程中的暂停期间启动“跛行”阻尼技术。然后,一旦控制系统检测到有效载荷的振荡在沿着至少一个维度的飞行稳定程度的减小之后(例如检测到的振荡不再超过阈值)和/或在固定的时间延迟之后(例如在检测到计时器的期满时)已被充分抑制,控制系统然后可以操作电动机以恢复系绳的缩回。
在另一示例情况下,控制系统可以在展开系绳用于有效载荷拾取和/或有效载荷递送的过程期间启动“跛行”阻尼技术。在该示例情况下,控制系统可以在展开过程的任何点处技术上启动“跛行”阻尼技术,例如在展开过程中没有暂停。然而,理想地,控制系统可以操作电动机以在检测到的振荡超过阈值时暂停系绳的展开,这可以允许控制系统在展开过程中的暂停期间启动“跛行”阻尼技术。然后,一旦控制系统检测到有效载荷的振荡在沿着至少一个维度的飞行稳定程度的减小之后和/或在固定的时间延迟之后(例如在检测到计时器的期满时)已被充分抑制,控制系统然后可以操作电动机以恢复系绳的展开。各种其他示例情况也是可能的。
此外,当控制系统操作电动机以恢复系绳的展开或缩回时,控制系统可以这样做,同时沿着至少一个维度的飞行稳定仍然减小和/或在沿着至少一个维度的飞行稳定增加之后。例如,一旦控制系统检测到有效载荷的振荡已被充分抑制和/或检测到计时器的期满,则控制系统可响应地操作电动机以展开或缩回系绳,因为控制系统也使UAV维持沿至少一个维度减少飞行稳定程度。在另一示例中,一旦控制系统检测到有效载荷的振荡已被充分抑制和/或检测到计时器的期满,则控制系统可以响应地使UAV沿着至少一个维度增加飞行稳定程度。在该示例中,在UAV沿着至少一个维度增加飞行稳定程度之后,控制系统然后可以操作电动机以展开或缩回系绳。其他示例也是可能的。
图32A至32H接下来共同示出了“跛行”阻尼技术,具体地在系绳缩回过程期间执行。
如图32A所示,UAV3200包括系绳3202和联接到系绳3202的有效载荷联接装置3204。此外,有效载荷3206示为已由UAV3200在地面上的递送位置处递送。此外,图32A示出了UAV3200悬停在递送位置上,而UAV的控制系统在系绳缩回模式下操作,以在有效载荷3206递送之后将有效载荷联接装置3204上升回到UAV。在这方面,UAV3200示出处于位置保持模式,其中UAV3200在悬停飞行期间基本保持物理空间中的物理位置“X,Y”。
如图32B所示,当在系绳缩回模式下操作时,UAV的控制系统暂停有效载荷联接装置3204的上升。在暂停期间,控制系统可选地检测到有效载荷联接装置3204的振荡处于大于阈值幅度的振荡幅度3208。响应于以这种方式检测振荡和/或响应于启动计时器,控制系统然后执行上述“跛行”阻尼例程。特别地,控制系统使UAV沿至少一个维度减小飞行稳定程度。通过这样做,UAV然后基于对UAV施加外力而沿着该维度移动,这可以抑制由于能量耗散引起的振荡。图32C至32F示出了这种运动和能量耗散。
更具体地,由于沿着维度的飞行稳定程度减小,摆动有效载荷联接装置3204沿着维度在第一方向上将UAV3200拖动到远离位置“X,Y”的距离D1处的位置,如图32C所示。随后,由于沿着维度的飞行稳定程度的持续减小以及由于能量耗散,摆动有效载荷联接装置3204沿着维度在第二方向(例如与第一方向相反)上将UAV3200拖动到远离物理位置“X,Y”的较小距离D2(例如小于D1)的位置,如图32D所示。随后,再次由于沿着维度的飞行稳定程度的持续减小以及由于进一步的能量耗散,摆动有效载荷联接装置3204沿着维度在第一方向上将UAV3200拖动到远离物理位置“X,Y”的甚至更小距离D3(例如小于D2)的位置,如图32E所示。最后,再次由于沿着维度的飞行稳定程度的持续减小以及由于进一步的能量耗散,摆动有效载荷联接装置3204沿着维度在第二方向上将UAV3200拖动到远离物理位置“X,Y”的甚至更小距离D4(例如小于D3)的位置,如图32F所示。以这种方式,随着能量继续耗散,UAV3200可以继续沿着维度来回移动。
如图32G所示,振荡示出为由于“跛行”阻尼例程而被抑制。可选地,在暂停期间和在执行“跛行”阻尼例程一段时间之后,控制系统检测到有效载荷联接装置3204的振荡处于低于阈值幅度的振荡幅度3210。在实践中,控制系统可以执行这种检测,同时沿着维度仍然减小飞行稳定和/或在控制系统沿着维度增加飞行稳定之后。尽管如此,控制系统确定振荡已被充分抑制和/或检测到计时器的期满,并且响应地确定系绳缩回过程可以恢复。这样,控制系统可以响应地在系绳缩回模式下恢复操作,以在有效载荷递送之后将有效载荷联接装置3204上升回到UAV3200,如图32H所示。其他说明也是可能的。
iii.展开/缠绕系绳以抑制振荡
根据示例性实施方式,UAV的控制系统可以通过操作电动机来展开和/或缠绕系绳来抑制有效载荷的振荡,从而改变系绳上的张力。在这样做时,控制系统可以增加和/或减少展开的系绳长度并且以各种速率这样做,这可以帮助耗散能量并因此最终抑制有效载荷的振荡。以这种方式,控制系统设置有附加的控制输入,该附加的控制输入不一定干扰系统的其他控制目标(例如不阻止飞行器保持位置同时还抑制有效载荷振荡)。
更具体地,控制系统可以操作电动机以改变系绳的缩回速率和/或系绳的展开速率。在实践中,缩回速率可以限定系绳缩回的正时、范围和/或速度,并且展开速率可以限定系绳展开的正时、范围和/或速度。这样,控制系统可以以第一模式操作电动机以使系绳以至少一个目标缩回速率(例如基于检测到的振荡确定和/或通过手动工程输入建立)缩回。另外或可替代地,控制系统可以以第二模式操作电动机以在至少一个目标展开速率(例如基于检测到的振荡确定和/或通过手动工程输入建立)下展开系绳。通过这种布置,控制系统因此可以使用各种特定方法来通过以各种速率控制系绳来抑制振荡。
例如,控制系统可以控制系绳的缠绕和/或展开,或者系绳的缠绕和/或展开的速率,以像摆动一样“泵送”有效载荷,其中随着有效载荷朝向摆动的底部移动,系绳拉出来,并且随着有效载荷朝着摆动的顶部移动,系绳保持快速(或甚至缠绕)。此外,系绳的“泵送”频率、周期和/或相位可以分别与有效载荷的振荡频率、周期和/或相位匹配。通过这样做,即使UAV保持基本静止,也可以移除摆动有效载荷的能量。
此外,绞盘的“泵送”程度可取决于有效载荷和UAV之间的距离,其对应于系绳的展开长度。具体地,当有效载荷和UAV之间存在大的距离时,有效载荷的摆动运动可能非常慢,例如约1/4赫兹。此时,在绞盘“泵送”期间展开或缠绕在绞盘上的系绳的量可以是几米。但是当有效载荷更接近UAV时,摆动运动可以加速到例如1赫兹或更高的数量级。在这种情况下,在“泵送”期间展开或缠绕在绞盘上的系绳的量可以是厘米量级。
此外,当有效载荷到UAV的距离改变时,系绳缠绕或展开的速率可以从一个振荡周期变化到下一个周期,并且甚至可以在单个振荡周期内变化。例如,缠绕或展开的速率可以与有效载荷的速度或有效载荷的平方速度成比例。其他示例也是可能的。
通过这种布置,控制系统可以在系绳缩回模式下操作时“泵送”绞盘以参与有效载荷的上升或者在系绳展开模式下操作时以参与有效载荷的下降。具体地,在有效载荷下降期间,有效载荷的振荡可以通过在有效载荷接近摆动的底部时将系绳拉出来而被抑制。然而,当有效载荷朝向摆动的顶部移动时,可以减少或停止从绞盘展开的系绳的量,或者当有效载荷移动到摆动的顶部时系绳甚至可以缠绕。系绳的这种“泵送”可以抵消有效载荷的摆动运动,以控制和阻尼有效载荷的振荡。相反,在有效载荷的上升期间,当有效载荷移动到摆动的顶部时,通过缠绕系绳可以抑制有效载荷的振荡。然而,当有效载荷朝向摆动的底部移动时,系绳可以展开或停止,或者以降低的速率缠绕。其他方法也是可能的。
iv.UAV移动以抑制振荡
根据示例实施方式,UAV的控制系统可以通过指示UAV本身在物理空间中以各种方式移动来抑制有效载荷的振荡。利用这种方法,控制系统可以指示UAV以在有效载荷上升和/或下降期间抵消、防止或减少有效载荷的移动的方式进行反应性移动。尽管下面描述了各种这样的移动,但是在不脱离本公开的范围的情况下也可以进行其他移动。
更具体地,控制系统可用于确定有效载荷的目标路径。该目标路径可以是在系绳缠绕期间有效载荷上升的目标路径,或者可以是在系绳展开期间有效载荷下降的目标路径。例如,目标路径可以基本垂直于地面并且可以从地面延伸到UAV。以这种方式,当有效载荷降低或升高时,控制系统可以有效地计划将有效载荷基本保持在UAV下方。但是当有效载荷降低或升高时,有效载荷的振荡可能导致有效载荷远离目标路径移动。
为了帮助解决该问题,如上所述,控制系统可以使UAV以各种方式移动。具体地,在给定的时间点,控制系统可以使用检测到的有效载荷的振荡作为确定有效载荷相对于目标路径的位置的基础。然后,基于所确定的有效载荷相对于目标路径的位置,控制系统可以确定由UAV执行的移动,以便将有效载荷移动得更靠近目标路径,并且控制系统可以使UAV执行确定的移动。这样,控制系统可以重复地确定这样的移动,因为有效载荷相对于目标路径的位置由于振荡而随时间变化,并且可以重复地使UAV执行移动以帮助抑制振荡。
作为示例,有效载荷的摆动运动可以通过响应于有效载荷的运动而水平移动或平移UAV来控制,例如通过试图将有效载荷保持在UAV下方。通过使UAV平移(例如来回移动)以使振荡最小化,可以抑制有效载荷的振荡(例如钟摆式摆动)。例如,控制系统可以确定有效载荷的当前位置与目标路径相距特定距离,并且有效载荷当前正在相对于目标路径的特定方向上移动。相应地,控制系统可以立即使UAV在特定方向上水平移动并且以基于特定距离的量这样做,从而试图将有效载荷保持在UAV下方。以这种方式,控制系统可以反应性地确定抵消有效载荷上的水平力的水平移动,并且防止或抑制有效载荷的振荡。其他示例也是可能的。
D.阻尼技术的选择
图33是示出用于选择一个或多个阻尼例程/技术以帮助抑制有效载荷的振荡的方法3300的流程图。在实践中,UAV的控制系统可以在系绳缩回模式下操作时或在系绳展开模式下操作时执行方法3300。根据方法3300的方框3302,当系绳至少部分展开时,控制系统可从多个可用阻尼例程中选择一个或多个阻尼例程来抑制有效载荷的振荡。然后,控制系统可以执行那些选择的阻尼例程,如方框3304所示。
根据本公开,控制系统可以选择上述阻尼例程中的任何一个。具体地,控制系统可以选择以下例程的任何组合:向前飞行以抑制振荡、“跛行”技术以抑制振荡、系绳的缠绕/展开以抑制振荡和/或UAV移动以抑制振荡。然而,在实践中,控制系统还可以选择此处未描述的其他阻尼例程,然后单独地或与任何上述阻尼例程组合地执行这样的阻尼例程。
此外,控制系统可以基于各种因素来选择阻尼例程,其中一些因素在下面描述。在实践中,控制系统可以使用这些因素的任何组合作为选择的基础,可能给予某些因素与其他因素相比更重要的因素。尽管下面描述了示例因素,但是在不脱离本公开的范围的情况下,其他因素也是可能的。
在一种情况下,控制系统可以基于检测到的振荡的特性来选择一个或多个阻尼例程,例如基于振荡的幅度、速度和/或频率等。例如,控制系统可以基于检测到的有效载荷的振荡的幅度来选择一个或多个阻尼例程。具体地,控制系统可以在其上存储利用阻尼例程或者两个或更多个阻尼例程的组合来映射各个幅度中的每个的映射数据等或者可以配置为参考该映射数据。举例来说,映射数据可以利用“向前飞行”阻尼技术来映射某个幅度范围,并且利用“系绳的缠绕/展开”阻尼技术来映射另一较低幅度范围。在实践中,映射数据可以以这种方式布置,因为“向前飞行”可以基本上更有效地阻止有效载荷的更严重的摆动。这样,控制系统可以使用传感器数据来确定检测到的振荡的幅度,然后可以参考映射数据以确定对应于检测到的幅度的一个或多个阻尼例程。
在另一种情况下,控制系统可以基于电动机的操作模式选择一个或多个阻尼例程。具体地,控制系统可以确定电动机是否在第一模式下操作,其中电动机在缠绕方向上向系绳施加扭矩,或者电动机是否在第二模式下操作,其中电动机在展开方向上向系绳施加扭矩。至少部分地基于所确定的电动机的操作模式,控制系统然后可以选择一个或多个阻尼例程。例如,如果电动机以第二模式操作,则控制系统可以选择除向前飞行阻尼技术之外的任何阻尼技术,以避免在准备和/或向前飞行期间进一步增加展开的系绳长度。
在又一种情况下,控制系统可以基于UAV的操作模式选择一个或多个阻尼例程。具体地,控制系统可以确定UAV是否在UAV试图拾取有效载荷的有效载荷拾取模式下操作或者UAV是否在UAV试图递送有效载荷的有效载荷递送模式下操作,可能分别确定有效载荷递送状态或者有效载荷拾取状态。至少部分地基于所确定的UAV的操作模式,控制系统然后可以选择一个或多个阻尼例程。例如,如果UAV作为有效载荷递送模式的一部分参与递送后系绳缩回,则控制系统可以选择向前飞行阻尼技术。在实践中,控制系统可以这样做,因为一旦有效载荷已被递送,UAV就可以开始向前飞行到下一个目的地。然而,如果UAV作为有效载荷拾取模式的一部分参与拾取后系绳缩回,则控制系统可以选择UAV移动阻尼技术,并且这样做是因为UAV移动可以帮助确保随着有效载荷朝向UAV上升,所拾取的有效载荷经常直接定位在UAV下方。
在又一种情况下,控制系统可以基于有效载荷的值来选择一个或多个阻尼例程。实际上,有效载荷的值可以是有效载荷的价格和/或可以是正在递送的有效载荷的优先级等。尽管如此,控制系统可以基于用户提供的输入来确定有效载荷的值和/或通过使用对象识别技术,以基于图像数据确定有效载荷的值等。利用这种布置,控制系统可以参考利用阻尼例程或者两个或更多个阻尼例程的组合来映射各种值中的每一个的映射数据。例如,映射数据可以利用“跛行”阻尼技术来映射更高的值,因为“跛行”技术可以提供损坏更高值有效载荷的最小风险。这样,控制系统可以参考映射数据以确定对应于所确定的有效载荷值的一个或多个阻尼例程。
在又一种情况下,控制系统可以基于UAV所处的环境的状态来选择一个或多个阻尼例程。具体地,控制系统可以使用传感器数据等来确定关于UAV所位于的环境的信息,例如关于环境中的物体的信息。通过这种布置,控制系统然后可以使用关于环境的信息来选择一个或多个阻尼例程。例如,如果控制系统确定物体位于远离UAV的阈值距离内,则控制系统可以选择“展开/缠绕系绳”阻尼技术,以避免因参与任何其他阻尼技术而导致的UAV的任何移动,从而避免与物体碰撞。其他情况也是可能的。
在另一方面,当控制系统选择一个或多个阻尼例程时,控制系统还可以确定执行每个所选例程的持续时间(例如设定上述计时器的持续时间),如果可行的话。在实践中,控制系统可以基于一个或多个上述因素确定每个这样的持续时间和/或可以以其他方式确定每个这样的持续时间。例如,当检测到的振荡的幅度较大时,控制系统可以确定应该在较长的持续时间内应用所选择的阻尼例程,从而允许足够的时间来充分地抑制振荡。可替代地,控制系统可以简单地执行所选的阻尼例程,直到控制系统检测到振荡已被充分抑制。其他示例也是可能的。
在又一方面,当控制系统选择两个或更多个阻尼例程时,控制系统还可以确定组合使用这些所选阻尼例程的方法。在实践中,控制系统可以基于一个或多个上述因素确定该方法和/或可以以其他方式确定该方法。此外,尽管下面描述了示例方法,但是在不脱离本公开的范围的情况下,其他示例方法也是可能的。
在一示例性方法中,控制系统可以确定使用所选的阻尼例程的顺序,例如通过确定第一阻尼例程应该后跟第二阻尼例程。例如,控制系统可以确定应该执行“跛行”阻尼技术,然后执行“展开/缠绕系绳”阻尼技术。在这方面,控制系统可以确定第二阻尼例程应该在第一阻尼例程结束之后立即开始。可替代地,控制系统可以确定控制系统应该在执行第一阻尼例程之后等待特定时间段,然后在特定时间段期满时执行第二阻尼例程。在一些情况下,控制系统可以使用特定时间段来评估检测到的振荡,并且可以仅在振荡未被充分抑制的情况下决定继续执行第二阻尼例程。
在另一示例方法中,控制系统可确定控制系统应同时执行两个或更多个所选阻尼例程。例如,控制系统可以确定控制系统应该同时执行UAV运动阻尼技术和展开/缠绕系绳阻尼技术。在这方面,控制系统可以确定控制系统应该在相同的时间点开始执行所选的阻尼例程。可替代地,控制系统可以确定控制系统应该开始执行第一阻尼例程,并且在执行第一阻尼例程的过程中,开始执行第二阻尼例程。其他示例方法和所描述方法的组合也是可能的。
E.其他阻尼方面
尽管本文将各种阻尼技术描述为在检测到有效载荷的振荡之后或响应于其而执行,但是也可以在其他情况下执行各种阻尼技术。例如,控制系统可以配置为在某些飞行阶段期间和/或在有效载荷拾取和/或递送的某些阶段期间执行一个或者多个阻尼技术等。在这种情况下,控制系统可以执行那些阻尼技术而不必检测有效载荷的振荡。在这方面,如上所述,控制系统可以执行阻尼例程一段时间,例如通过在开始阻尼例程时启动计时器,然后响应于检测到该计时器的期满而结束阻尼例程(和/或执行其他操作,比如恢复系绳缩回)。以这种方式,控制系统可以基本上采取预防措施以最小化可能存在的任何振荡。
XII.故障检测和校正方法
A.释放有效载荷的故障
如上文关于方法1800和2600所述,UAV可以在递送模式下操作以将有效载荷递送到目标位置并且随后在释放验证模式下操作以验证有效载荷已经与有效载荷联接装置分离。然而,可能存在有效载荷在递送时不与有效载荷联接装置分离的情况。例如,有效载荷联接装置可能在有效载荷上被钩住,使得当操作UAV电动机以引起系绳的过延伸时,有效载荷联接装置保持联接到有效载荷而不是降低有效载荷和与之分离。因此,控制系统可以检测这种情况并且响应地通过使系绳从UAV分离而不是使有效载荷从有效载荷联接装置分离来采取补救措施。
图34是示出用于从UAV分离系绳的方法3400的流程图。方法3400可以由诸如本文其他地方描述的那些UAV执行。例如,方法3400可以由具有绞盘系统的UAV的控制系统执行。此外,绞盘系统可包括设置在线轴上的系绳、可以在第一模式和第二模式下操作的电动机,其分别抵抗和辅助由于重力而展开系绳(例如通过向前或反向驱动线轴),有效载荷联接装置,其将系绳机械地联接到有效载荷,以及有效载荷锁闩,其可在防止有效载荷从UAV降低的闭合位置和允许有效载荷从UAV降低的打开位置之间切换。
如方框3402所示,方法3400涉及UAV的控制系统,其操作电动机以展开系绳并将有效载荷朝向地面降低(例如通过执行方法1800)。控制系统可以配置成检测有效载荷何时接触地面并且响应地启动系绳过延伸过程以试图从有效载荷联接装置释放有效载荷,如方框3404所示。在有效载荷停止下降后,当电动机继续展开系绳时,会发生系绳过延伸。在系绳过延伸期间,有效载荷联接装置随着系绳展开而继续降低,而有效载荷保持静止。例如,当有效载荷搁置在有效载荷联接装置的突出臂或其他钩状机构上时,这可以使有效载荷联接装置从有效载荷分离。如上面关于方法1800所述,控制系统可以通过监测电动机的速度和/或电流并且确定电动机速度和/或电动机电流是阈值低来检测有效载荷何时接触地面。如上面关于方法1800进一步描述,启动系绳过延伸过程可以包括在第二模式下操作电动机以即使在有效载荷已经到达地面之后也在使得系绳继续展开的方向上向前驱动线轴。
通常,执行系绳过延伸过程将导致有效载荷联接装置从有效载荷分离。然而,在有效载荷不从有效载荷联接装置释放的情况下,系绳过延伸过程可重复达预定次数,如方框3404进一步所示。
实际上,一旦有效载荷到达地面并且控制系统已经执行第一系绳过延伸过程以试图将有效载荷联接装置与有效载荷分离,控制系统可以基于电动机的电流(例如通过执行方法2600的方框2602和2604)确定有效载荷联接装置是否实际上与有效载荷分离。例如,在操作电动机以使系绳过延伸之后,控制系统可以操作电动机以开始缩回系绳,并且如果有效载荷仍附接到有效载荷联接装置,则有效载荷的额外重量可以使电动机汲取更多电流。因此,控制系统可以通过检测电动机电流是阈值高来确定有效载荷仍附接到有效载荷联接装置。
响应于做出这样的确定,控制系统可以重复将有效载荷降低到地面的过程,操作电动机以引起系绳的过延伸(这次可能是某个预定的额外长度),并且然后在系绳上向上拉以测试有效载荷分离,如方框3402和3404所示。这些过程可以重复多次,直到控制系统确定有效载荷已经从有效载荷联接装置分离或直到已经发生阈值重复次数,如方框3404所示。
控制系统可以跟踪已经执行了引起系绳过延伸和测试有效载荷分离的过程的次数,并且可以确定这些过程已经重复了阈值次数而没有成功地从有效载荷联接装置释放有效载荷,如方框3406所示。响应于做出该确定,控制系统可以决定放弃进一步试图将有效载荷与有效载荷联接装置分离,并且可以代替地通过操作电动机来决定将系绳与UAV分离,以允许系绳在UAV的上升期间展开,如方框3408所示。
在实践中,控制系统可以操作电动机以通过控制提供给电动机的最大电流来使系绳展开。通过限制提供给电动机的最大电流,控制系统限制电动机可以施加在系绳上的力的量。更具体地,控制系统可以将最大电流限制到足够小的值,使得电动机施加在系绳上的最大向上力的大小小于由于有效载荷上的重力而在系绳上的向下力。结果,UAV可以向上飞行,并且由于系绳上的向下力超过来自电动机的向上力,系绳将继续展开。在其他示例中,控制系统可以仅关闭电动机,允许其自由旋转,以便获得类似的结果。
此外,如上所述,系绳可设置在线轴上。更具体地,系绳的第一端可以非固定地缠绕在线轴上。这样,当系绳从线轴完全展开时,系绳可能从线轴分离并脱离线轴。因此,当控制系统操作电动机以允许系绳展开时,控制系统可以进一步使UAV启动飞行到不同位置(例如返回位置),使得UAV的飞行展开系绳并将系绳与线轴分离,从而从UAV释放系绳,如方框3410所示。以这种方式,当有效载荷联接装置不能从有效载荷分离时,有效载荷和系绳都可以留在递送位置,让UAV安全地离开。
B.钩住检测
根据本文公开的过程执行有效载荷的系拴拾取和递送的UAV可以发现其自身在各种不同类型的环境中操作,具有要解决的各种不同问题。一个问题可能涉及施加在系绳上的不期望的或意外的力。例如,人可能在系绳上过度猛拉,或者系绳可能会在移动或静止的物体上被钩住,从而在系绳上产生向下力。其他示例也是可能的。在这些情况下,如果向下力足够大,则UAV可被拉出其飞行状态,可能会损坏UAV、有效载荷或附近的人员或财产。因此,控制系统可以检测在有效载荷的输送期间何时将某些力施加到系绳并且响应地通过允许系绳从其线轴展开来采取补救措施。
图35是说明在将有效载荷降低到地面时检测和解决系绳上不希望的向下力的方法3500的流程图。方法3500可以由诸如本文其他地方描述的那些UAV执行。例如,方法3500可以由具有绞盘系统的UAV的控制系统执行。此外,绞盘系统可包括设置在线轴上的系绳、可以在第一模式和第二模式下操作的电动机,其分别抵抗和辅助由于重力而展开系绳(例如通过向前或反向驱动线轴),有效载荷联接装置,其将系绳机械地联接到有效载荷,以及有效载荷锁闩,其可在防止有效载荷从UAV降低的闭合位置和允许有效载荷从UAV降低的打开位置之间切换。
如方框3502所示,方法3500涉及操作电动机的UAV的控制系统以执行有效载荷的系拴递送(例如通过执行方法1800)。在将有效载荷递送到目标位置的过程中,控制系统可以检测系绳上的不期望的向下力。如上所述,在系绳上存在额外的重量(或者在这种情况下,存在足够的向下力)可能导致提供给电动机的电流增加,以便保持电动机的期望旋转速度。这样,控制系统可以基于电动机电流检测系绳上的不期望的向下力。此外,为了避免误报,控制系统还可以考虑电动机电流增加多长时间。
另外,当检测到不期望的向下力时,控制系统可以考虑系绳的展开长度。例如,为了限制向地平面或接近地平面的源的向下力的检测(例如检测人在系绳上猛拉),控制系统还可以确定系绳已经从线轴展开多远,以便确定系绳的任何部分是否处于地平面或接近地平面。其他示例也是可能的。
因此,在实践中,在将有效载荷递送到目标位置的过程中并且在UAV处于飞行时,控制系统可以基于表示系绳线轴的旋转的编码器数据来确定系绳的展开长度,并且控制系统可以基于电动机的电流传感器或UAV的电力系统确定电动机电流。此外,控制系统可以确定(a)系绳的展开长度大于阈值长度和(b)电动机的电动机电流大于阈值电流,持续至少预定的超时时段,如方框3504所示。响应于进行这样的确定,控制系统可以操作电动机以允许系绳在UAV上升时展开(例如上面关于方法3400的方框3408所述),如方框3506所示。并且进一步响应于做出确定,控制系统可以使UAV启动飞行到不同位置(例如返回位置),使得UAV的飞行展开系绳并将系绳与线轴分离,从而从UAV释放系绳,如方框3508所示。以这种方式,当在系绳上施加不希望的向下力时,系绳可以从UAV上展开和分离,从而允许UAV安全地离开。
在其他示例中,不是检测钩住并且响应地操作电动机以展开和释放系绳,而是可以通过在拾取有效载荷时对电动机施加电流限制来解决钩住。将电动机电流限制到最大值限制了电动机可以施加在系绳上的力的量,这可以防止UAV在系绳被钩住时发生碰撞。例如,如果电流限制足够低,使得电动机施加在系绳上的最大向上力小于系绳上的向下力,则电动机上的电流限制可允许系绳完全展开并从其线轴脱离,如果系绳被钩住,则UAV会飞走。
除了在有效载荷的递送期间经历不期望的力之外,系绳还可能在有效载荷的拾取期间经历不期望的力。例如,当从地面向UAV绞卷有效载荷时,有效载荷和/或系绳可能会钩住各种物体,例如树木、建筑物或各种其他附近物体。作为另一示例,意外的重载荷可能附接在系绳上,导致系绳上的阻止UAV提升有效载荷的过大向下力。因此,控制系统可以检测在有效载荷的拾取期间何时将某些力施加到系绳上并且相应地采取补救措施。
图36是示出当将有效载荷朝向UAV绞卷时检测和解决系绳上的不期望的向下力的方法3600的流程图。方法3600可以由诸如本文其他地方描述的那些UAV执行。例如,方法3600可以由具有绞盘系统的UAV的控制系统执行。此外,绞盘系统可包括设置在线轴上的系绳、可以在第一模式和第二模式下操作的电动机,其分别抵抗和辅助由于重力而展开系绳(例如通过向前或反向驱动线轴),有效载荷联接装置,其将系绳机械地联接到有效载荷,以及有效载荷锁闩,其可在防止有效载荷从UAV降低的闭合位置和允许有效载荷从UAV降低的打开位置之间切换。
如方框3602所示,方法3600涉及操作电动机的UAV的控制系统以执行有效载荷的系拴递送(例如通过执行方法1700)。在拾取要递送的有效载荷的过程期间,并且当UAV在拾取位置上方或其附近时,控制系统可以确定有效载荷联接装置机械地联接到有效载荷(例如基于如上面关于方法1700所述的电动机电流),并且可以响应地操作电动机以缩回系绳并将有效载荷朝向UAV提升,如方框3604所示。
在缩回系绳时,控制系统可以在系绳和/或有效载荷被钩住时检测到错误状况。为了检测钩住,控制系统可以监测电动机电流。如上所述,向系绳添加向下力可以引起电动机电流的增加,以抵消向下力并保持由速度控制器设定的电动机速度。因此,当系绳和/或有效载荷被钩住时,电动机电流可能随着电动机试图保持由速度控制器设定的转速而增加。然而,如上面关于方法1700所述,电动机电流的增加可以指示在绞卷完成之后到达UAV的有效载荷。因此,控制系统还可以在检测到钩住时监测并考虑系绳的展开长度。例如,如果系绳的展开长度指示有效载荷尚未到达UAV,则控制系统可以检测到钩住。另一方面,如果系绳的展开长度指示有效载荷已经到达UAV,则控制系统可能不会检测到钩住。因此,当缩回有效载荷联接至其的系绳时,控制系统可以在(a)系绳的展开长度大于阈值长度和(b)电动机的电动机电流大于阈值电流时检测错误状况,如方框3606所示。
在任何情况下,在检测到错误状况之后,控制系统可以通过操作电动机以展开系绳(例如预定长度)来试图校正错误状况,然后可以恢复缩回系绳,如方框3608所示。展开系绳可以增加系绳的松弛,可能允许有效载荷的重量松开检测到的钩住。在一些示例中,控制系统可以使UAV在恢复缩回系绳之前重新定位自身,以便提高松开钩住的机会和/或减少遇到相同钩住的机会。
如果在恢复系绳缩回之后,控制系统检测到错误状况仍然存在(例如方框3606所示),则控制系统可以通过重复方框3608重复试图校正错误状况,并且控制系统可以监测重复校正试图的次数。一旦控制系统确定已经进行了预定次数的试图校正错误状况而没有成功地校正错误状况,控制系统可以响应地结束拾取有效载荷的过程并且启动有效载荷递送过程以将有效载荷返回到在拾取位置处的地面或其附近,如方框3610所示。更具体地,控制系统可以操作电动机以将有效载荷降低到地面,就像它根据方法1800执行有效载荷递送一样。
C.拾取有效载荷的故障
有时,当UAV试图拾取有效载荷以进行系拴递送时(例如通过执行方法1700),UAV可能在有效载荷已经附接到系绳之前缩回系绳。例如,在执行方法1700时,UAV的控制系统可能错误地确定有效载荷在方框1708和1710处附接到系绳(例如由于在预定的附接验证时段期间某人或某物拉动系绳)并且响应地操作电动机以缩回系绳。因此,控制系统可以配置成在系绳缩回期间确定有效载荷实际上没有附接到系绳。
图37是检测UAV未能拾取有效载荷的方法3700的流程图。方法3700可以由诸如本文其他地方描述的那些UAV执行。例如,方法3700可以由具有绞盘系统的UAV的控制系统执行。此外,绞盘系统可包括设置在线轴上的系绳、可以在第一模式和第二模式下操作的电动机,其分别抵抗和辅助由于重力而展开系绳(例如通过向前或反向驱动线轴),有效载荷联接装置,其将系绳机械地联接到有效载荷,以及有效载荷锁闩,其可在防止有效载荷从UAV降低的闭合位置和允许有效载荷从UAV降低的打开位置之间切换。
如方框3702所示,方法3700涉及操作电动机的UAV的控制系统以执行有效载荷的系拴递送(例如通过执行方法1700)。在拾取要递送的有效载荷的过程期间,并且当UAV在拾取位置上方或其附近时,控制系统可以操作电动机以展开系绳并将有效载荷联接装置降低到预期的有效载荷附接高度,如方框3704所示。如上所述,有效载荷附接高度可以是人或者可能是机器人设备可以抓住有效载荷联接装置以将联接装置附接到有效载荷的高度。例如,有效载荷附接高度可以是地平面上方小于两米的高度。
在降低系绳之后,控制系统可以等待预定的有效载荷附接时段,如方框3706所示。该附接时段允许人或者可能是机器人设备有时间将有效载荷附接到有效载荷联接装置。
当有效载荷附接时段结束时,控制系统可以执行附接验证过程,如方框3706进一步所示。特别地,附接验证过程可以涉及控制系统操作电动机以便抵抗系绳的展开持续预定的附接验证时段(例如通过向上拉动系绳以便将系绳保持在适当位置或以一定速率缩回系绳),如方框3706a所示。由于有效载荷的增加的重量,当附接有效载荷时,将系绳保持在适当位置或使系绳以一定速率缩回所需的电动机电流将更大。这样,附接验证过程还可以涉及控制系统至少部分地基于预定附接验证时段期间的电动机电流来确定有效载荷联接装置是否机械地联接到有效载荷,如方框3706b所示。例如,如上所述,控制系统可以基于来自电动机的电流传感器或UAV的电力系统的数据来确定电动机电流。如果在附接验证过程期间,电动机电流超过阈值电流值,则控制系统可确定有效载荷联接到有效载荷联接装置。另一方面,如果电动机电流低于阈值电流值,则控制系统可以确定有效载荷联接装置未联接到有效载荷。
此外,当控制系统确定有效载荷联接装置没有机械地联接到有效载荷时,控制系统可以使UAV重复有效载荷联接装置的降低和附接验证过程,以便重新试图拾取有效载荷,并且在一些实施例中,这些过程可以仅重复达预定次数,如方框3706所示。此时,控制系统不是试图再次拾取有效载荷,而是可以使UAV放弃拾取并离开。实际上,例如,控制系统可以确定附接验证过程已经重复预定次数而没有成功地将有效载荷联接装置联接到有效载荷,并且响应地启动取消有效载荷的拾取的过程并启动UAV飞行到下一个不同的位置,如方框3708所示。不同的位置可以是另一个拾取位置,或者它可以是一些其他位置,比如用于对接和/或存储UAV的UAV基座。其他示例也是可能的。
如上所述,可能存在控制系统错误地确定在有效载荷验证时段期间附接有效载荷的情况,并且控制系统可以响应地使电动机进入绞卷状态以使系绳朝向UAV缩回。因此,为了减少这种错误确定,可以增加上述预定附接验证时段的持续时间。另外或可替代地,控制系统还可以配置为当在绞卷状态下操作时执行附接验证过程和系绳降低过程,如方框3706所示。
D.有效载荷锁闩故障
如上面关于方法1800所述,当UAV成功地拾取有效载荷并将有效载荷或有效载荷联接装置拉入UAV的插座中时,控制系统可以闭合有效载荷锁闩以将有效载荷固定到UAV。然而,可能存在控制系统未能闭合锁闩(例如由于障碍或一些其他问题)或控制系统闭合锁闩但闭合的锁闩未能将有效载荷固定到UAV的情况。因此,控制系统可以配置为确定有效载荷锁闩是否已成功地将有效载荷固定到UAV。
在一些实施例中,控制系统可以在试图闭合有效载荷锁闩之前操作电动机以在系绳上向上拉动。如果有效载荷和/或有效载荷联接装置已经到达UAV插座,则有效载荷联接装置压靠在UAV上,使得电动机不能再进一步缩回系绳。此时,闭合有效载荷锁闩可以成功地将有效载荷和/或有效载荷联接装置固定到UAV。另一方面,如果有效载荷和/或有效载荷联接装置尚未到达UAV插座,则电动机仍然可以缩回系绳,并且此时闭合有效载荷锁闩将不能成功地固定有效载荷。因此,当闭合有效载荷锁闩时和/或在闭合有效载荷锁闩之后持续一段时间,控制系统可以配置为监测电动机速度以确定有效载荷锁闩是否成功闭合并将有效载荷固定到UAV。例如,响应于检测到电动机速度高于阈值速度,控制系统可以确定有效载荷锁闩未能成功地闭合和/或将有效载荷固定到UAV。
在其他实施例中,在试图闭合有效载荷锁闩之后,控制系统可以通过操作电动机以将系绳展开预定长度来检测有效载荷锁闩故障。如果有效载荷锁闩成功闭合以接合有效载荷或有效载荷联接装置,那么有效载荷或有效载荷联接装置可以布置在UAV插座内,使得有效载荷的全部或一部分重量位于有效载荷锁闩上,而不是系绳,并且电动机电流可能低于阈值电流(例如约为零)。另一方面,如果有效载荷锁闩未能闭合,则有效载荷的重量可能由系绳支撑,并且支撑有效载荷的重量所需的电动机电流可能高于阈值电流。因此,控制系统可以基于UAV的电动机电流确定有效载荷锁闩是否成功闭合。
在任何情况下,响应于检测到有效载荷锁闩未能闭合,控制系统可以操作电动机以将有效载荷绞回到UAV并重新试图闭合锁闩。该过程可以重复达预定次数或直到有效载荷锁闩成功闭合。在未成功地重复该过程预定次数之后,控制系统可以响应地操作电动机以将有效载荷降低回到地面并且将有效载荷从系绳分离(例如通过执行方法1800)。
下表提供了如上所述的用于检测和解决错误的各种方法的简要表示:


XIII.UAV的示例状态图
图38A-38C示出了执行本文描述的各种过程中的一个或多个的UAV的示例状态图3800。如图所示,UAV可能偶尔在IDLE状态3802下操作。在IDLE状态下,有效载荷锁闩可处于闭合位置,从而防止系绳展开。此外,为了保持电动机静止,速度控制器可以设定对应于0m/s的系绳下降速率的电动机的期望操作速度,并且控制系统可以在调整电动机电流时忽略累积错误随时间的变化,以匹配期望的操作速度。电动机电流可被限制到非常高的值或者可以完全没有限制,因为在该状态期间不期望电动机旋转。在一些示例中,当将有效载荷从源位置运输到目标位置时,或者当导航到源位置以进行拾取时,UAV可以进入IDLE状态3802。另外,响应于接收到停止命令,UAV可以从任何状态进入IDLE状态3802。其他示例也是可能的。
一旦UAV到达用于拾取有效载荷的源位置,控制系统可以接收用于拾取有效载荷的命令并且可以响应地进入有效载荷拾取模式(例如通过执行方法1700)。如状态图3800所示,有效载荷拾取模式可以包括LOWERING HOOK状态3804,在此期间控制系统操作电动机以从线轴展开系绳并将有效载荷联接装置降低到地面。虽然状态3804将有效载荷联接装置称为钩,但是有效载荷联接装置可以采用各种形式,如上所述。有效载荷联接装置可以基于UAV的高度降低到预定的有效载荷附接高度。一旦有效载荷联接装置达到有效载荷附接高度(例如当控制系统确定展开的系绳的长度至少为阈值长度时),控制系统可以使UAV进入WAITING FOR PAYLOAD状态3806达时间延迟,在此期间控制系统操作电动机以将有效载荷联接装置保持在基本恒定的高度,从而允许有效载荷附接到有效载荷联接装置。另外,如果控制系统未能确定有效载荷联接装置已经在设定时间段(例如超时时段)内降低到预定的有效载荷附接高度,则控制系统可以响应地前进到WAITING FOR PAYLOAD状态3806。
从WAITING FOR PAYLOAD状态3806,一旦经过时间延迟,控制系统进入VERIFYPAYLOAD状态3808。在此状态期间,控制系统基于当电动机试图将有效载荷联接装置保持在恒定高度或开始使系绳向UAV缩回时提供给的电动机电流确定有效载荷是否附接到有效载荷联接装置。如果在VERIFY PAYLOAD状态3808期间电动机电流低于阈值电流,则控制系统返回到LOWERING HOOK状态3804以重新试图附接有效载荷。如上面关于方法3700所述,该重复可以重复多次直到达到极限。一旦达到极限,控制系统可以使UAV缩回系绳、上升并且可能返回到IDLE状态3802,UAV可以从该状态导航到某个其他位置。
另一方面,如果在VERIFY PAYLOAD状态3808期间,控制系统确定有效载荷已经附接到有效载荷联接装置(例如通过在时间延迟之后确定电动机电流至少是阈值电流),控制系统可以进入WINCHING PAYLOAD状态3810。在该状态下,控制系统可以操作电动机以缩回系绳并将有效载荷拉向UAV。如上面关于方法3700所述,控制系统还可以监测该状态下的电动机电流,以确定在VERIFY PAYLOAD状态3808期间是否获得误报(例如通过检测电动机电流是阈值低)。另外,如上面关于方法3600所述,控制系统可以在WINCHING PAYLOAD状态3810期间监测电动机电流,以便检测系绳何时被钩住(例如通过检测到电动机电流是阈值高)。响应于检测到钩住,控制系统可以操作电动机以将有效载荷降低预定长度并且重新试图绞卷有效载荷。在试图移除钩住的阈值次数之后,控制系统可以操作电动机以将有效载荷降低到地面并且放弃有效载荷的拾取。这可能涉及前进到DESCENDING状态3822,这将在下面更详细地讨论。
当在WINCHING PAYLOAD状态3810下操作时,如果没有检测到钩住,或者如果解决了所有检测到的钩住,则控制系统可以检测到有效载荷在UAV的阈值距离内(例如通过测量系绳线轴的转数)并且响应地进入ENGAGING PAYLOAD状态3812。在此状态期间,控制系统可以将提供给电动机的电流增加预定的时间段,以便试图将有效载荷拉入UAV的插座中并将有效载荷定向在其内。如果在该状态期间,控制系统检测到电动机电流低于阈值电流和/或系绳被展开至少阈值长度,则控制系统可以响应地确定有效载荷离UAV太远并且可以重新进入WINCHING PAYLOAD状态3830,直到控制系统再次检测到有效载荷足够接近UAV以前进到ENGAGING PAYLOAD状态3812。
另一方面,如果在ENGAGING PAYLOAD状态3812期间,电动机电流保持阈值高并且系绳的展开长度指示有效载荷已经到达UAV,则控制系统进入LATCHING PAYLOAD状态3814。在该状态期间,控制系统将有效载荷锁闩切换到闭合位置,从而防止系绳和/或有效载荷从UAV下降。如上所述,控制系统可以通过监测电动机速度和/或通过操作电动机以试图降低有效载荷并监测电动机电流来确定有效载荷锁闩是否成功闭合。如果控制系统确定有效载荷锁闩未成功闭合,则控制系统可返回到WINCHING PAYLOAD状态3810并重新试图提升和接合有效载荷。但是如果控制系统确定有效载荷锁闩被成功闭合,则控制系统可以进入WAITING TO DELIVER状态3816。
WAITING TO DELIVER状态3816可以类似于IDLE状态3802,其中有效载荷被固定到UAV,并且控制系统操作电动机以保持有效载荷静止。如果在时间延迟之后,控制系统检测到电动机速度大于阈值速度,则这可以指示有效载荷没有充分地固定到UAV,并且控制系统可以响应地返回到WINCHING PAYLOAD状态3810。否则,进入WAITING TO DELIVER状态3816表示拾取模式结束。
当处于WAITING TO DELIVER状态3816时,控制系统可以接收递送有效载荷的命令,并且可以响应地进入递送模式(例如通过执行方法1800)。递送模式可以包括PRE-DROPTENSION状态3818。在这种状态下,当有效载荷锁闩闭合时,控制系统可以操作电动机以提升有效载荷(例如通过将所需的系绳速度设置为1m/s或者在向上方向上的一些其他速度,或者通过将电动机电流设置为预定值),从而从有效载荷锁闩移除有效载荷的重量并使得更容易打开有效载荷锁闩。当处于PRE-DROP TENSION状态3818时,控制系统可以打开有效载荷锁闩并在时间延迟之后前进到POST-DROP TENSION状态3820。在这种状态下,控制系统可以操作电动机以将系绳保持在恒定位置达预定时间量,以允许有效载荷的重量将有效载荷牢固地拉到有效载荷联接装置上,从而减少有效载荷可能会脱落并从有效载荷联接装置上脱离的任何机会。在经过预定量的时间之后,控制系统可以进入DESCENDING状态3822。
在PRE-DROP TENSION状态3818和POST-DROP TENSION状态3820下,如果控制系统检测到有效载荷已经行进了至少阈值距离(例如通过测量线轴的旋转),那么这可以是表明发生了错误(例如有效载荷从有效载荷联接装置过早脱离或系绳的卡扣),因为在这些状态期间线轴应保持基本不动。作为检测到这种错误的结果,控制系统可以返回到IDLE状态3802并使UAV导航到可被维护的位置。
在DESCENDING状态3822下,控制系统可以操作电动机以根据指定电动机的恒定或变化的操作速度的预定下降曲线来展开系绳。在检测到系绳已经展开至少预定量(例如基于UAV的高度检测到有效载荷在地面的阈值距离内)时,控制系统可以进入WAITING FORTOUCHDOWN状态3824。在一些示例中,控制系统也可以配置成如果在DESCENDING状态3822下经过阈值时间量则从DESCENDING状态3822前进到WAITING FOR TOUCHDOWN状态3824,而不前进到WAITING FOR TOUCHDOWN状态3824。
在WAITING FOR TOUCHDOWN状态3824下,控制系统可以监测电动机电流及其操作速度,以便检测有效载荷是否已到达地面。具体地,在确定电动机电流和电动机速度都是阈值低时,控制系统可以进入POSSIBLE TOUCHDOW状态3826以验证有效载荷实际上已经到达地面。控制系统可以配置为保持在POSSIBLE TOUCHDOW状态3826达预定的时间量。如果在此期间,电动机电流或电动机速度变为阈值高,则这可以指示有效载荷尚未到达地面,并且控制系统可以返回到WAITING FOR TOUCHDOWN状态3824。但是,如果在POSSIBLE TOUCHDOW状态3826的持续时间期间,电动机电流和电动机速度保持阈值低,则这可以指示有效载荷实际上已到达地面,并且控制系统可以响应地前进到TOUCHED DOWN状态3828。在一些示例中,控制系统还可以配置为如果在WAITING FOR TOUCHDOWN状态3824下经过阈值时间量则从WAITING FOR TOUCHDOWN状态3824前进到TOUCHED DOWN状态3828,而不前进到POSSIBLETOUCHDOW状态3826。
一旦处于TOUCHED DOWN状态3828,控制系统可操作电动机以引起系绳的过延伸,使得有效载荷联接装置继续降低,同时有效载荷在地面上保持静止。继续降低有效载荷联接装置可以使有效载荷联接装置从有效载荷分离。在使系绳过延伸达预定时间量之后,控制系统可以进入VERIFY RELEASE状态3830,以便确定有效载荷联接装置是否确实与有效载荷分离。
在VERIFY RELEASE状态3830下,控制系统可以操作电动机以在系绳上向上拉动。基于当在系绳上向上拉动时的电动机电流,控制系统可以确定有效载荷是否已经从有效载荷联接装置释放。如果电动机电流是阈值高,则这可以指示有效载荷仍然附接,并且控制系统可以返回到TOUCHED DOWN状态3828。该过程可以重复达预定次数,此时控制系统可以进入FREE SPIN状态3832。
在FREE SPIN状态3832下,控制系统可以操作电动机以允许系绳完全展开,使得系绳断开并从UAV脱离。这可以通过将电动机电流限制到足够低的值来实现,使得电动机不能抵消由有效载荷上的重力引起的系绳上的向下力。可替代地,可以完全关闭电动机(例如将电动机电流限制在0A)。
返回参考VERIFY RELEASE状态3830,如果在整个预定持续时间内电动机电流保持阈值低,则这可以指示有效载荷实际上已与有效载荷联接装置分离,并且控制系统可以响应地前进到ASCENDING状态3834。
在ASCENDING状态3834下,控制系统可以操作电动机以根据指定电动机的恒定或变化的操作速度的预定上升曲线将系绳和有效载荷联接装置向上缩回到UAV。一旦控制系统确定系绳的展开长度低于阈值长度使得有效载荷联接装置足够靠近UAV(例如基于测量的线轴的旋转数量),控制系统可以进入ASCENDING PAUSE状态3836。
在ASCENDING PAUSE状态3836下,控制系统可以操作电动机以停止系绳的缩回。一旦系绳的缩回停止,控制系统可以控制UAV的移动,以便抑制在ASCENDING状态3834期间可能已经发生的系绳的任何振荡。在抑制系绳振荡之后,控制系统可以进入FINALASCENT状态3836。
在FINALASCENT状态3836下,控制系统可以操作电动机以恢复缩回系绳。然而,在这种状态下,系绳可以以比ASCENDING状态3834更慢的速率缩回。这种较慢的速率可能在系绳上引入较弱的振荡。同样在FINAL ASCENT状态3836期间,控制系统可以监测电动机电流以确定有效载荷联接装置何时到达UAV。实际上,当有效载荷联接装置到达UAV时,该装置压靠在UAV上,电动机速度下降到零,并且电动机电流增加以试图增加电动机速度。因此,控制系统可基于电动机电流超过阈值电流来确定有效载荷联接装置已到达UAV。相应地,控制系统可以进入ENGAGING状态3840。
在ENGAGING状态3840中,控制系统可以增加最大电动机电流,以便允许电动机将有效载荷联接装置拉入UAV的插座中并将其自身定向在其内。一旦有效载荷联接装置固定在插座内,控制系统就可以返回到IDLE状态3802。如果在ENGAGING状态3840期间,电动机电流低于阈值电流,则这可以指示有效载荷联接装置世实际上不在UAV附近,并且检测到的电流增加可能是由其他东西引起的(例如系绳的暂时钩住)。在这种情况下,控制系统可以恢复到FINALASCENT状态3838。
如状态图3800所示,一旦控制系统进入ASCENDING状态3834,控制系统可以在确定已经过了阈值时间量而没有前进状态时重复前进到下一状态。
在一些示例中,如状态3818至3828所示,当与降低系绳相比时,较低的最大电流限制可以在缩回系绳时施加在UAV电动机上,如状态3834至388所示。这是因为在缩回系绳时系绳更容易遇到钩住。施加较低的电流限制减小了电动机可以施加在系绳上的力的量。这可以通过继续将UAV朝向钩住绞卷来防止电动机使UAV坠毁。并且如上所述,如果电流限制足够低以使电动机的最大力弱于系绳上的向下力,则电动机上的电流限制可允许系绳完全展开并从其线轴脱离,如果当系绳被钩住时,UAV可能飞走了。当在状态3806至3814期间最初拾取有效载荷时,可以采用类似的方法。
XIV.其他方面
在一些实施例中,UAV的控制系统可以配置为在系统启动时校准电动机的旋转编码器和速度控制器。实际上,当UAV系统最初通电时,电动机应该是静止的。因此,编码器数据还应指示电动机是静止的。如果编码器数据另外指示,则可以将偏移应用于编码器数据以解决任何不一致。
控制系统还可以在UAV系统启动时测试电动机的摩擦。基于所测量的电动机摩擦,可以将偏移应用于各种电动机电流设置以考虑所测量的电动机摩擦。随着时间的推移,DC电动机的摩擦可能会发生变化。因此,在每次启动时测量摩擦并相应地调整电动机电流设置可以在电动机的整个寿命期间实现一致的操作。
XV.结论
图中所示的特定布置不应视为限制。应该理解,其他实施方式可以包括给定图中所示的更多或更少每个元件。此外,可以组合或省略一些所示元件。此外,示例性实施方式可以包括未在附图中示出的元件。
另外,虽然本文已经公开了各种方面和实施方式,但是其他方面和实施方式对于本领域技术人员来说将是显而易见的。这里公开的各个方面和实施方式是出于说明的目的而不是限制性的,真正的范围和精神由所附权利要求指示。可以利用其他实施方式,并且可以进行其他改变,而不脱离这里给出的主题的精神或范围。容易理解的是,如本文一般描述的并且在附图中示出的本公开的方面可以以各种不同的配置来布置、替换、组合、分离和设计,所有这些在本文中都是预期的。
Claims (15)
1.一种无人驾驶飞行器系统,包括:
具有机身的无人驾驶飞行器(UAV);
系绳,其具有固定到位于UAV中的绞盘系统的第一端和固定到有效载荷联接装置的第二端;
有效载荷联接装置插座,其位于UAV的机身中;
具有手柄的有效载荷,所述手柄直接连接到所述有效载荷的顶部,其中,所述有效载荷的手柄位于所述有效载荷联接装置中的槽内;且
其中,所述有效载荷连接装置包括壳体;
其中,所述壳体附接到所述系绳的第二端;
其中,第一凸轮和第二凸轮从所述有效载荷连接装置的壳体的外表面向外延伸,并且其中,所述第一和第二凸轮适于接合定位在所述UAV的机身内的所述有效载荷连接装置插座内定位的配合凸轮,以将有效载荷连接装置和所述有效载荷的手柄定向到位于所述UAV的机身内的有效载荷连接装置插座内的期望位置。
2.根据权利要求1所述的无人驾驶飞行器系统,其中,所述有效载荷的顶部具有线性形状。
3.根据权利要求2所述的无人驾驶飞行器系统,其中,所述机身具有凹陷约束槽,用于接收所述有效载荷的顶部。
4.根据权利要求3所述的无人驾驶飞行器系统,其中,所述凹陷约束槽纵向地定位在所述机身中。
5.一种无人驾驶飞行器系统,包括:
具有机身的无人驾驶飞行器(UAV);
系绳,其具有固定到位于UAV中的绞盘系统的第一端和固定到有效载荷联接装置的第二端;
有效载荷联接装置插座,其纵向延伸地定位于UAV的机身中;
具有手柄的有效载荷,所述手柄直接连接到所述有效载荷的顶部,其中,所述有效载荷的手柄适于固定到所述有效载荷联接装置,其中,第一凸轮和第二凸轮从所述有效载荷联接装置的外表面向外延伸,并且其中所述第一和第二凸轮适于接合定位在所述UAV的机身内的所述有效载荷连接装置插座内定位的配合凸轮,以将有效载荷连接装置和所述有效载荷的手柄定向到位于所述UAV的机身内的有效载荷连接装置插座内的期望位置。
6.根据权利要求5所述的无人驾驶飞行器系统,其中,所述第一凸轮向上延伸以形成第一尖顶点,所述第二凸轮向上延伸以形成钝顶点。
7.根据权利要求1所述的无人驾驶飞行器系统,其中,所述壳体的一部分被加重,使得当有效载荷的手柄与所述壳体的槽分离时,所述壳体的顶部向下旋转。
8.根据权利要求1所述的无人驾驶飞行器系统,其中,所述有效载荷联接装置不具有移动零件。
9.根据权利要求1所述的无人驾驶飞行器系统,其中,所述有效载荷联接装置包括壳体;
其中,所述壳体在壳体的底部附接到系绳的第一端;
其中,所述壳体包括在所述壳体的第一内表面和所述壳体上一对竖直向上延伸的指状物之间竖直延伸的槽;
其中,所述槽适于接收所述有效载荷的手柄;
开口形成在所述一对竖直指状物之间,形成系绳槽。
10.根据权利要求9所述的无人驾驶飞行器系统,其中,所述壳体的一部分被加重,使得当有效载荷的手柄与所述壳体的槽分离时,所述壳体的顶部旋转使得所述指状物指向下。
11.根据权利要求9所述的无人驾驶飞行器系统,其中,所述系绳定位在所述系绳槽中。
12.根据权利要求11所述的无人驾驶飞行器系统,其中,当所述有效载荷的手柄从所述壳体的槽分离时,所述系绳与所述系绳槽脱开并在所述壳体旋转过程中延伸通过所述指状物之间的开口,且所述壳体的底部从所述系绳悬挂。
13.一种将有效载荷固定到无人驾驶飞行器(UAV)的方法,包括以下步骤:
提供系绳,其具有固定到位于UAV中的绞盘系统的第一端和固定到有效载荷联接装置的第二端;有效载荷联接装置插座,其位于UAV的机身中;具有手柄的有效载荷,其中,所述有效载荷的手柄位于所述有效载荷联接装置中的槽内;其中,所述有效载荷联接装置包括从壳体的外表面向外延伸的第一凸轮和第二凸轮,并且其中,所述第一和第二凸轮适于接合定位在所述有效载荷联接装置插座内的配合凸轮,以迫使壳体旋转到UAV的机身内的期望位置;
操作所述绞盘系统以将有效载荷联接装置和有效载荷提升到UAV,直到所述第一和第二凸轮与位于有效载荷联接装置内的配合凸轮接合;以及
进一步操作所述绞盘系统以将有效载荷联接装置定向到有效载荷联接装置插座内的期望位置。
14.根据权利要求13所述的方法,其中,所述有效载荷包括顶部,所述机身包括凹陷约束槽,并且还包括将有效载荷的顶部定位到所述凹陷约束槽中的步骤。
15.根据权利要求13所述的方法,其中,所述有效载荷的手柄包括一对孔,所述机身包括一对锁定销,并且还包括将所述锁定销插入通过所述手柄中的所述一对孔以将所述手柄和有效载荷固定到UAV的步骤。
Applications Claiming Priority (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662385854P | 2016-09-09 | 2016-09-09 | |
| US201662385870P | 2016-09-09 | 2016-09-09 | |
| US62/385,870 | 2016-09-09 | ||
| US62/385,854 | 2016-09-09 | ||
| US15/389,138 US10793272B2 (en) | 2016-09-09 | 2016-12-22 | Unmanned aerial vehicle and techniques for securing a payload to the UAV in a desired orientation |
| US15/389,138 | 2016-12-22 | ||
| CN201780065609.9A CN110072774B (zh) | 2016-09-09 | 2017-06-29 | 无人驾驶飞行器及用于将有效载荷沿期望定向固定到uav的技术 |
| PCT/US2017/040035 WO2018048496A1 (en) | 2016-09-09 | 2017-06-29 | Unmanned aerial vehicle and techniques for securing a payload to the uav in a desired orientation |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201780065609.9A Division CN110072774B (zh) | 2016-09-09 | 2017-06-29 | 无人驾驶飞行器及用于将有效载荷沿期望定向固定到uav的技术 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115535239A true CN115535239A (zh) | 2022-12-30 |
Family
ID=61559588
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201780065609.9A Active CN110072774B (zh) | 2016-09-09 | 2017-06-29 | 无人驾驶飞行器及用于将有效载荷沿期望定向固定到uav的技术 |
| CN202211252560.7A Pending CN115535239A (zh) | 2016-09-09 | 2017-06-29 | 无人驾驶飞行器及将有效载荷固定到无人驾驶飞行器的方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201780065609.9A Active CN110072774B (zh) | 2016-09-09 | 2017-06-29 | 无人驾驶飞行器及用于将有效载荷沿期望定向固定到uav的技术 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10793272B2 (zh) |
| EP (2) | EP4245669A3 (zh) |
| CN (2) | CN110072774B (zh) |
| AU (1) | AU2017324060B2 (zh) |
| WO (1) | WO2018048496A1 (zh) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015061008A1 (en) * | 2013-10-26 | 2015-04-30 | Amazon Technologies, Inc. | Unmanned aerial vehicle delivery system |
| JP2017104365A (ja) * | 2015-12-11 | 2017-06-15 | 株式会社ディスコ | 有人ドローン |
| US20180022455A1 (en) * | 2016-07-20 | 2018-01-25 | Dustin McCaslin | Dropping mechanism with universal mounting points |
| US10232940B2 (en) | 2016-09-09 | 2019-03-19 | Wing Aviation Llc | Methods and systems for raising and lowering a payload |
| US11104438B2 (en) | 2016-09-09 | 2021-08-31 | Wing Aviation Llc | Payload coupling apparatus for UAV and method of delivering a payload |
| US10414488B2 (en) * | 2016-09-09 | 2019-09-17 | Wing Aviation Llc | Methods and systems for damping oscillations of a payload |
| US10872304B1 (en) * | 2017-09-22 | 2020-12-22 | Amazon Technologies, Inc. | Pre-flight fabrication and assembly of aerial vehicles |
| US11401034B2 (en) * | 2018-02-28 | 2022-08-02 | Walmart Apollo, Llc | Drone delivery system having a single use lowering line |
| US10974934B2 (en) * | 2018-04-20 | 2021-04-13 | Wing Aviation Llc | Perforated capsule hook for stable high speed retract |
| US10807715B2 (en) * | 2018-05-22 | 2020-10-20 | Wing Aviation Llc | Method for automatic drone package pickup |
| US10946963B2 (en) | 2018-08-21 | 2021-03-16 | Wing Aviation Llc | External containment apparatus for unmanned aerial vehicle |
| US11319070B2 (en) * | 2019-06-28 | 2022-05-03 | The Boeing Company | Deployable clasping systems and methods |
| US11667402B2 (en) | 2020-09-08 | 2023-06-06 | Wing Aviation Llc | Landing pad with charging and loading functionality for unmanned aerial vehicle |
| CN113650788B (zh) * | 2021-09-01 | 2022-03-22 | 常州市小域智能科技有限公司 | 一种降落伞自动脱开装置 |
| CN113619806B (zh) * | 2021-09-14 | 2023-09-26 | 广东电网有限责任公司 | 一种系留无人机 |
| US20230085101A1 (en) * | 2021-09-16 | 2023-03-16 | InSitu, Inc., a subsidiary of the Boeing Company | Methods and apparatus to guide an unmanned aerial vehicle for recovery thereof |
| WO2023220209A1 (en) * | 2022-05-10 | 2023-11-16 | Fenwal, Inc. | Unmanned helicopter for delivering blood product to a target location |
| US20240017814A1 (en) * | 2022-07-14 | 2024-01-18 | Wing Aviation Llc | Smart Cargo Bay Door(s) for a UAV |
| US11767111B1 (en) | 2022-07-14 | 2023-09-26 | Wing Aviation Llc | Slotted receptacle for payload handle to secure payload within a UAV |
Family Cites Families (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1386583A (en) * | 1918-04-03 | 1921-08-02 | Jr John Paterson | Hoisting-hook |
| US1873822A (en) * | 1929-08-01 | 1932-08-23 | Castro Manuel | Hook for aircraft cargo handling apparatus |
| US3036797A (en) * | 1959-03-27 | 1962-05-29 | Agusta Aeronaut Costr | Freight handling means for helicopters |
| US3088608A (en) * | 1961-12-07 | 1963-05-07 | Michael J Theodore | Cargo handling device |
| GB1335737A (en) * | 1971-03-04 | 1973-10-31 | Westland Aircraft Ltd | Winch mechanisms |
| US3805977A (en) * | 1972-07-27 | 1974-04-23 | Us Navy | Mobile asw target handling kit |
| US3809334A (en) * | 1972-11-06 | 1974-05-07 | United Aircraft Corp | Winch system for helicopter |
| US3904156A (en) | 1974-07-11 | 1975-09-09 | Us Army | External load stabilization apparatus |
| SE451270B (sv) | 1986-01-14 | 1987-09-21 | Hamrin Torbjoern | Lyftkrok for automatisk losgoring av last |
| SE507623C3 (sv) | 1992-02-18 | 1998-08-10 | Wiklund Henry & Co | Lyftkrok med saekerhetsspaerr och moejlighet till automatisk lastfrigoering |
| JPH10114489A (ja) | 1996-10-11 | 1998-05-06 | Nippon Juki Hanbai Kk | 吊り下げフック |
| US5788186A (en) | 1997-02-10 | 1998-08-04 | Sail D. White Ent. Inc. | Helicopter load suspending apparatus |
| US6334537B1 (en) | 2000-04-20 | 2002-01-01 | Daniel A. Tepper | Inflatable container for protecting an item packaged therein |
| JP3383283B2 (ja) | 2000-11-13 | 2003-03-04 | 石川産業有限会社 | 自動フック |
| US7025304B2 (en) * | 2004-04-23 | 2006-04-11 | The United States Of America As Represented By The Secretary Of The Navy | Helicopter messenger cable illumination |
| US7705879B2 (en) | 2006-02-13 | 2010-04-27 | Max-Viz, Inc. | System for and method of synchronous acquisition of pulsed source light in performance of monitoring aircraft flight operation |
| US9070101B2 (en) | 2007-01-12 | 2015-06-30 | Fatdoor, Inc. | Peer-to-peer neighborhood delivery multi-copter and method |
| US7762194B2 (en) | 2006-09-12 | 2010-07-27 | Lockheed Martin Corporation | Apparatus comprising a payload ejection mechanism |
| US8162263B2 (en) | 2009-03-31 | 2012-04-24 | Honeywell International Inc. | Payload quick release for an aerial system |
| DE202010002309U1 (de) | 2010-02-11 | 2010-05-06 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Reglereinrichtung für Helikopter |
| WO2012006158A1 (en) | 2010-06-29 | 2012-01-12 | Aerovironment, Inc. | Uav payload module camera assembly and retraction mechanism |
| US9243965B2 (en) | 2010-11-08 | 2016-01-26 | Tulsa Winch, Inc. | System and method for calculating winch line pull |
| US9469410B2 (en) | 2011-07-22 | 2016-10-18 | Carleton Life Support Systems Inc. | Aerial refueling system, apparatus and methods |
| US9376185B2 (en) | 2011-07-28 | 2016-06-28 | Bluefin Robotics Corporation | Internal winch for self payout and re-wind of a small diameter tether for underwater remotely operated vehicle |
| US8532846B2 (en) | 2011-08-26 | 2013-09-10 | Donald John Tollenaere | Helicopter sling-load stability control and release system |
| US8909379B2 (en) | 2012-03-07 | 2014-12-09 | Tait Towers Manufacturing, LLC | Winch control system |
| US20130233964A1 (en) | 2012-03-07 | 2013-09-12 | Aurora Flight Sciences Corporation | Tethered aerial system for data gathering |
| US9384668B2 (en) | 2012-05-09 | 2016-07-05 | Singularity University | Transportation using network of unmanned aerial vehicles |
| US9085362B1 (en) | 2012-11-21 | 2015-07-21 | Lockheed Martin Corporation | Counter-unmanned aerial vehicle system and method |
| US9290269B2 (en) | 2013-03-15 | 2016-03-22 | CyPhy Works, Inc. | Spooler for unmanned aerial vehicle system |
| US11724836B2 (en) | 2013-03-15 | 2023-08-15 | Arthur M Dula | Tether for spacecraft reaction control system |
| US9205922B1 (en) | 2013-07-17 | 2015-12-08 | The Boeing Company | Systems and methods for implementing a payload distribution system |
| US9346547B2 (en) | 2013-08-26 | 2016-05-24 | Google Inc. | Mechanisms for lowering a payload to the ground from a UAV |
| WO2015061008A1 (en) | 2013-10-26 | 2015-04-30 | Amazon Technologies, Inc. | Unmanned aerial vehicle delivery system |
| US9308994B2 (en) | 2014-02-27 | 2016-04-12 | Aai Corporation | Apparatus and method of attachment of a payload |
| US9422139B1 (en) * | 2014-05-19 | 2016-08-23 | Google Inc. | Method of actively controlling winch swing via modulated uptake and release |
| US9321531B1 (en) | 2014-07-08 | 2016-04-26 | Google Inc. | Bystander interaction during delivery from aerial vehicle |
| US9932110B2 (en) * | 2014-07-22 | 2018-04-03 | Jonathan McNally | Method for installing an object using an unmanned aerial vehicle |
| US9718547B2 (en) | 2014-08-12 | 2017-08-01 | Sikorsky Aircraft Corporation | System and method for determining a length of an external load sling |
| US9849981B1 (en) | 2014-08-28 | 2017-12-26 | X Development Llc | Payload-release device position tracking |
| US9174733B1 (en) * | 2014-08-28 | 2015-11-03 | Google Inc. | Payload-release device and operation thereof |
| US9580173B1 (en) * | 2014-08-28 | 2017-02-28 | X Development Llc | Translational correction of payload-release device based on tracked position |
| US9764837B2 (en) * | 2014-11-14 | 2017-09-19 | Top Flight Technologies, Inc. | Micro hybrid generator system drone |
| US9688404B1 (en) * | 2014-12-02 | 2017-06-27 | Amazon Technologies, Inc. | Stabilized airborne drop delivery |
| US10549854B2 (en) * | 2015-03-26 | 2020-02-04 | Bell Helicopter Textron Inc. | Integrated aircraft hoist |
| CN204956927U (zh) * | 2015-08-13 | 2016-01-13 | 王清洁 | 一种无人机灭火装置 |
| MX2018005347A (es) | 2015-10-28 | 2018-09-21 | Walmart Apollo Llc | Aparato y metodo para proporcionar liberacion de paquete para sistema aereo no tripulado. |
| US20180312247A1 (en) * | 2015-11-06 | 2018-11-01 | Prodrone Co., Ltd. | Carrying device |
| US20170073071A1 (en) | 2015-11-20 | 2017-03-16 | Guided Systems Technologies, Inc. | Unmanned aircraft and unmanned ground vehicle teaming for remote infrastructure inspection |
| US10315764B2 (en) | 2016-06-10 | 2019-06-11 | Wing Aviation Llc | Apparatuses for releasing a payload from an aerial tether |
-
2016
- 2016-12-22 US US15/389,138 patent/US10793272B2/en active Active
-
2017
- 2017-06-29 CN CN201780065609.9A patent/CN110072774B/zh active Active
- 2017-06-29 AU AU2017324060A patent/AU2017324060B2/en active Active
- 2017-06-29 WO PCT/US2017/040035 patent/WO2018048496A1/en unknown
- 2017-06-29 CN CN202211252560.7A patent/CN115535239A/zh active Pending
- 2017-06-29 EP EP23178792.0A patent/EP4245669A3/en active Pending
- 2017-06-29 EP EP17849241.9A patent/EP3494042B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018048496A1 (en) | 2018-03-15 |
| EP4245669A2 (en) | 2023-09-20 |
| US20180072418A1 (en) | 2018-03-15 |
| US10793272B2 (en) | 2020-10-06 |
| EP4245669A3 (en) | 2023-12-13 |
| EP3494042B1 (en) | 2023-07-19 |
| AU2017324060A1 (en) | 2019-04-18 |
| AU2017324060B2 (en) | 2020-08-06 |
| CN110072774A (zh) | 2019-07-30 |
| EP3494042A4 (en) | 2020-03-25 |
| EP3494042A1 (en) | 2019-06-12 |
| CN110072774B (zh) | 2022-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109890701B (zh) | 提高和降低有效载荷时检测和解决故障事件的方法及系统 | |
| CN109863084B (zh) | 用于uav的有效载荷联接装置及递送有效载荷的方法 | |
| CN110139800B (zh) | 用于提高和降低有效载荷的方法及系统 | |
| CN110072774B (zh) | 无人驾驶飞行器及用于将有效载荷沿期望定向固定到uav的技术 | |
| AU2021290304B2 (en) | Methods and systems for damping oscillations of a payload | |
| CN109890702B (zh) | 用于用户交互和反馈的用于系绳控制的方法、系统以及非暂时性计算机可读介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |