CN115123493A - 一种水下打捞作业工具 - Google Patents
一种水下打捞作业工具 Download PDFInfo
- Publication number
- CN115123493A CN115123493A CN202211015436.9A CN202211015436A CN115123493A CN 115123493 A CN115123493 A CN 115123493A CN 202211015436 A CN202211015436 A CN 202211015436A CN 115123493 A CN115123493 A CN 115123493A
- Authority
- CN
- China
- Prior art keywords
- mounting seat
- air bag
- underwater fishing
- groups
- supporting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63C—LAUNCHING, HAULING-OUT, OR DRY-DOCKING OF VESSELS; LIFE-SAVING IN WATER; EQUIPMENT FOR DWELLING OR WORKING UNDER WATER; MEANS FOR SALVAGING OR SEARCHING FOR UNDERWATER OBJECTS
- B63C7/00—Salvaging of disabled, stranded, or sunken vessels; Salvaging of vessel parts or furnishings, e.g. of safes; Salvaging of other underwater objects
- B63C7/02—Salvaging of disabled, stranded, or sunken vessels; Salvaging of vessel parts or furnishings, e.g. of safes; Salvaging of other underwater objects in which the lifting is done by hauling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63C—LAUNCHING, HAULING-OUT, OR DRY-DOCKING OF VESSELS; LIFE-SAVING IN WATER; EQUIPMENT FOR DWELLING OR WORKING UNDER WATER; MEANS FOR SALVAGING OR SEARCHING FOR UNDERWATER OBJECTS
- B63C7/00—Salvaging of disabled, stranded, or sunken vessels; Salvaging of vessel parts or furnishings, e.g. of safes; Salvaging of other underwater objects
- B63C7/02—Salvaging of disabled, stranded, or sunken vessels; Salvaging of vessel parts or furnishings, e.g. of safes; Salvaging of other underwater objects in which the lifting is done by hauling
- B63C7/04—Salvaging of disabled, stranded, or sunken vessels; Salvaging of vessel parts or furnishings, e.g. of safes; Salvaging of other underwater objects in which the lifting is done by hauling using pontoons or the like
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Mechanical Means For Catching Fish (AREA)
Abstract
本发明适用于水利工程技术领域,尤其涉及一种水下打捞作业工具,包括螺旋推进器,所述水下打捞作业工具还包括:安装座,所述螺旋推进器至少设置有两组,螺旋推进器均布安装在安装座的底部,用于驱动安装座移动,安装座上安装有可折叠的气囊;浮力控制机构,所述浮力控制机构安装在安装座上,且位于气囊内侧,用于控制气囊内部的气体体积;收卷机构,所述收卷机构固定安装在安装座底部,用于连接被打捞物品。本发明通过设置气囊,在装置下潜到指定深度时,将装置与被打捞物进行连接,从而利用浮力控制机构向气囊充气,从而改变本工具整体的浮力,利用浮力来提升打捞物,并且能够在打捞完成时,自动收纳,大大提高了打捞效率。
Description
技术领域
本发明属于水利工程技术领域,尤其涉及一种水下打捞作业工具。
背景技术
打捞水中的物体,一般通常情况下,是潜水员下潜水下打捞沉入水底之物,深海区域也可用智能机器打捞探索。
水下打捞就是打捞沉没于水中物体的工程。包括打捞船舶、飞行器、货物等。在航道、港口水域中的打捞作业,可达到清理通航障碍物的目的。打捞是一项综合性技术,涉及测量、潜水、水下切割、封堵、水下爆破和水下焊接等等。
对较小的物体进行打捞时,主要是通过人工作业,将具有浮力的装置与被打捞的物品连接,从而利用浮力将其提升至水面,上述操作过程比较复杂,需要人员不断运输浮力装置,打捞耗费时间较长。
发明内容
本发明实施例的目的在于提供一种水下打捞作业工具,旨在解决现有技术中需要人员不断运输浮力装置,打捞耗费时间较长的问题。
本发明实施例是这样实现的,一种水下打捞作业工具,包括螺旋推进器,所述水下打捞作业工具还包括:
安装座,所述螺旋推进器至少设置有两组,螺旋推进器均布安装在安装座的底部,用于驱动安装座移动,安装座上安装有可折叠的气囊;
浮力控制机构,所述浮力控制机构安装在安装座上,且位于气囊内侧,用于控制气囊内部的气体体积;
收卷机构,所述收卷机构固定安装在安装座底部,用于连接被打捞物品。
优选的,所述浮力控制机构包括:
气囊支撑结构,所述气囊支撑结构固定安装在气囊内壁,用于支撑气囊远离安装座的一侧;
气体控制结构,所述气体控制结构内容置有压缩气体,气体控制结构用于控制压缩气体释放和压缩。
优选的,所述气囊支撑结构包括支撑板,支撑板固定安装在气囊内,支撑板上固定安装有伸缩筒,伸缩筒内滑动设置有伸缩杆,伸缩筒内还安装有升降电机,升降电机通过螺杆与伸缩杆连接,伸缩杆顶部固定安装有顶板,伸缩筒外侧设置有多组支撑环,支撑环间隔同轴设置,顶板与相邻支撑环以及相邻支撑环之间均通过第二拉索连接。
优选的,所述气体控制结构包括压缩空气箱,所述压缩空气箱固定安装在安装座上,压缩空气箱连接有排气控制阀和压缩泵,安装座为顶部设置有开口的槽型结构,安装座内壁上固定安装有电动推杆,电动推杆上固定连接有卡止块,安装座上还转动安装有多组卡止齿轮,所述卡止齿轮与安装座之间还设置有卷簧,卡止齿轮上同轴设置有卷轮,卷轮上绕有第一拉索,气囊靠近安装座的一侧设置有折叠部,折叠部外侧设置有导环,第一拉索穿过导环与气囊顶部固定连接。
优选的,所述卡止齿轮、卡止块、电动推杆和第一拉索均设置有六组,且均为均布设置。
优选的,所述收卷机构包括旋转盘,所述旋转盘转动安装在安装座底部,旋转盘内侧设置有收卷盘,收卷盘与安装座固定连接,收卷盘上设置有通孔,旋转盘上对称设置有两组导向管,通孔内设置有拉绳,拉绳的两端分别从两组导向管穿出,拉绳两端分别连接有一组旋转连接座,旋转盘外径上设置有蜗轮,安装座上安装有收卷电机,收卷电机连接有蜗杆,蜗杆与蜗轮配合连接。
优选的,螺旋推进器设置有三组。
本发明实施例提供的一种水下打捞作业工具,结构简单,设计合理,通过设置气囊,在装置下潜到指定深度时,将装置与被打捞物进行连接,从而利用浮力控制机构向气囊充气,从而改变本工具整体的浮力,利用浮力来提升打捞物,并且能够在打捞完成时,自动收纳,大大提高了打捞效率。
附图说明
图1为本发明实施例提供的一种水下打捞作业工具的结构示意图;
图2为图1中A处的局部放大图;
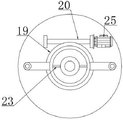
图3为本发明实施例提供的收卷机构的结构示意图;
图4为本发明实施例提供的气囊支撑结构的部分结构示意图。
附图中:1、安装座;2、电动推杆;3、卡止块;4、卷簧;5、气囊;6、第一拉索;7、顶板;8、支撑环;9、第二拉索;10、导环;11、排气控制阀;12、压缩空气箱;13、伸缩杆;14、螺杆;15、升降电机;16、支撑板;17、压缩泵;18、旋转盘;19、蜗轮;20、蜗杆;21、收卷盘;22、通孔;23、拉绳;24、旋转连接座;25、收卷电机;26、折叠部;27、容置腔;28、卡止齿轮;29、伸缩筒;30、螺旋推进器;100、收卷机构;200、浮力控制机构;201、气囊支撑结构;202、气体控制结构。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
以下结合具体实施例对本发明的具体实现进行详细描述。
如图1所示,为本发明实施例提供的一种水下打捞作业工具的结构示意图,包括螺旋推进器30,所述水下打捞作业工具还包括:
安装座1,所述螺旋推进器30至少设置有两组,螺旋推进器30均布安装在安装座1的底部,用于驱动安装座1移动,安装座1上安装有可折叠的气囊5;
浮力控制机构200,所述浮力控制机构200安装在安装座1上,且位于气囊5内侧,用于控制气囊5内部的气体体积;
收卷机构100,所述收卷机构100固定安装在安装座1底部,用于连接被打捞物品。
在本实施例中,安装座1为顶部设置有开口的槽状结构,气囊5顶部为球形,中部以及底部均为圆柱状的折叠部26,因此在不使用时,气囊5能够整体折叠起来,缩小体积;实际使用时,利用螺旋推进器30带动整个装置在水体内部移动,当移动至指定的位置时,通过收卷机构100将本工具与被打捞物进行连接,并将其张紧,然后利用浮力控制机构200向气囊5内部不断充入气体,使得气囊5不断膨胀,随着排水体积逐渐增加,本工具整体受到的浮力也逐渐增加,当浮力大于本工具与被打捞物整体的重量时,被打捞物便会上浮,当然,也可以在浮力稍大于本工具与被打捞物整体的重量时,启动螺旋推进器30,利用螺旋推进器30来带动被打捞物移动。
如图1所示,作为本发明的一个优选实施例,所述浮力控制机构200包括:
气囊支撑结构201,所述气囊支撑结构201固定安装在气囊5内壁,用于支撑气囊5远离安装座1的一侧;
气体控制结构202,所述气体控制结构202内容置有压缩气体,气体控制结构202用于控制压缩气体释放和压缩。
在本实施例中,为了减少阻力,气囊5顶部为球形结构,因此需要利用气囊支撑结构201从内部对其进行支撑,使其呈现为球形,而气体控制结构202则是用于释放压缩气体,或者将释放的压缩气体再次回收,从而实现重复使用的目的。
如图1和图4所示,作为本发明的一个优选实施例,所述气囊支撑结构201包括支撑板16,支撑板16固定安装在气囊5内,支撑板16上固定安装有伸缩筒29,伸缩筒29内滑动设置有伸缩杆13,伸缩筒29内还安装有升降电机15,升降电机15通过螺杆14与伸缩杆13连接,伸缩杆13顶部固定安装有顶板7,伸缩筒29外侧设置有多组支撑环8,支撑环8间隔同轴设置,顶板7与相邻支撑环8以及相邻支撑环8之间均通过第二拉索9连接。
如图1和图2所示,作为本发明的一个优选实施例,所述气体控制结构202包括压缩空气箱12,所述压缩空气箱12固定安装在安装座1上,压缩空气箱12连接有排气控制阀11和压缩泵17,安装座1为顶部设置有开口的槽型结构,安装座1内壁上固定安装有电动推杆2,电动推杆2上固定连接有卡止块3,安装座1上还转动安装有多组卡止齿轮28,所述卡止齿轮28与安装座1之间还设置有卷簧4,卡止齿轮28上同轴设置有卷轮,卷轮上绕有第一拉索6,气囊5靠近安装座1的一侧设置有折叠部26,折叠部26外侧设置有导环10,第一拉索6穿过导环10与气囊5顶部固定连接。
在本实施例中,在进行打捞时,气囊5处于收缩状态,因此本工具整体的受到的浮力较小,在螺旋推进器30的推进作用下,本工具整体下沉,直至到达指定位置,进而利用收卷机构100与被打捞物连接,连接完成后,利用排气控制阀11逐渐释放压缩气体,在此过程中,升降电机15启动,通过螺杆14驱动伸缩杆13相对伸缩筒29伸长,因此顶板7与支撑板16之间的距离逐渐增加,此时支撑环8之间的距离逐渐增加,直到第二拉索9完全拉直,从而从气囊5内部对其进行支撑,以起到减小阻力的作用,进一步的,继续释放压缩气体,此时气囊5收到的内部压力逐渐大于卷簧4的拉力,因此第一拉索6逐渐从卷轮中绕出,随着气囊5内的气压逐渐增加,气囊5的折叠部26也将逐渐展开,此时气囊5的体积逐渐增加,因此气囊5受到的浮力也逐渐增加,直到气囊5受到的浮力与本工具以及被打捞物的整体重量一致,此时,利用电动推杆2推动卡止块3将卡止齿轮28卡死,限制其转动,此时便可以通过螺旋推进器30轻松的控制被打捞物的走向,以实现打捞的目的,在打捞结束后,排气控制阀11关闭,此时压缩泵17将气囊5内部的气体压缩,并重新泵入到压缩空气箱12当中,气囊5内部气体压力减小,卷簧4回收,因此第一拉索6将会逐渐绕入卷轮当中,折叠部26回到折叠状态,而伸缩筒29也将落入到设置在压缩空气箱12芯部的容置腔27当中,然后升降电机15启动,伸缩杆13收缩,此时,支撑环8回落,此处,相邻支撑环8的直径不同,并且两组相邻支撑环8中,较小直径的支撑环8外径小于较大直径的支撑环8的内径,从而避免支撑环8重叠。
如图1所示,作为本发明的一个优选实施例,所述卡止齿轮28、卡止块3、电动推杆2和第一拉索6均设置有六组,且均为均布设置。
如图1和图3所示,作为本发明的一个优选实施例,所述收卷机构100包括旋转盘18,所述旋转盘18转动安装在安装座1底部,旋转盘18内侧设置有收卷盘21,收卷盘21与安装座1固定连接,收卷盘21上设置有通孔22,旋转盘18上对称设置有两组导向管,通孔22内设置有拉绳23,拉绳23的两端分别从两组导向管穿出,拉绳23两端分别连接有一组旋转连接座24,旋转盘18外径上设置有蜗轮19,安装座1上安装有收卷电机25,收卷电机25连接有蜗杆20,蜗杆20与蜗轮19配合连接。
在本实施例中,旋转连接座24用于连接夹具或者绳索,通过夹具和绳索将被打捞物固定,为了保证本工具的重心线与被打捞物的重心线重合,并保持本工具位于水平位置,在完成连接之后,使得通孔22与导向管轴线重合,此时拉绳23可以自由滑动,在螺旋推进器30的驱动下,使得本工具的重心线与被打捞物的重心线重合,且本工具处于水平位置,进而通过收卷电机25驱动蜗杆20旋转,蜗杆20与蜗轮19配合,使得旋转盘18旋转,拉绳23将会绕在收卷盘21上,此时拉绳23被张紧,即可进行拖拽。
如图1所示,作为本发明的一个优选实施例,螺旋推进器30设置有三组。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
Claims (7)
1.一种水下打捞作业工具,包括螺旋推进器,其特征在于,所述水下打捞作业工具还包括:
安装座,所述螺旋推进器至少设置有两组,螺旋推进器均布安装在安装座的底部,用于驱动安装座移动,安装座上安装有可折叠的气囊;
浮力控制机构,所述浮力控制机构安装在安装座上,且位于气囊内侧,用于控制气囊内部的气体体积;
收卷机构,所述收卷机构固定安装在安装座底部,用于连接被打捞物品。
2.根据权利要求1所述的水下打捞作业工具,其特征在于,所述浮力控制机构包括:
气囊支撑结构,所述气囊支撑结构固定安装在气囊内壁,用于支撑气囊远离安装座的一侧;
气体控制结构,所述气体控制结构内容置有压缩气体,气体控制结构用于控制压缩气体释放和压缩。
3.根据权利要求2所述的水下打捞作业工具,其特征在于,所述气囊支撑结构包括支撑板,支撑板固定安装在气囊内,支撑板上固定安装有伸缩筒,伸缩筒内滑动设置有伸缩杆,伸缩筒内还安装有升降电机,升降电机通过螺杆与伸缩杆连接,伸缩杆顶部固定安装有顶板,伸缩筒外侧设置有多组支撑环,支撑环间隔同轴设置,顶板与相邻支撑环以及相邻支撑环之间均通过第二拉索连接。
4.根据权利要求2所述的水下打捞作业工具,其特征在于,所述气体控制结构包括压缩空气箱,所述压缩空气箱固定安装在安装座上,压缩空气箱连接有排气控制阀和压缩泵,安装座为顶部设置有开口的槽型结构,安装座内壁上固定安装有电动推杆,电动推杆上固定连接有卡止块,安装座上还转动安装有多组卡止齿轮,所述卡止齿轮与安装座之间还设置有卷簧,卡止齿轮上同轴设置有卷轮,卷轮上绕有第一拉索,气囊靠近安装座的一侧设置有折叠部,折叠部外侧设置有导环,第一拉索穿过导环与气囊顶部固定连接。
5.根据权利要求4所述的水下打捞作业工具,其特征在于,所述卡止齿轮、卡止块、电动推杆和第一拉索均设置有六组,且均为均布设置。
6.根据权利要求1所述的水下打捞作业工具,其特征在于,所述收卷机构包括旋转盘,所述旋转盘转动安装在安装座底部,旋转盘内侧设置有收卷盘,收卷盘与安装座固定连接,收卷盘上设置有通孔,旋转盘上对称设置有两组导向管,通孔内设置有拉绳,拉绳的两端分别从两组导向管穿出,拉绳两端分别连接有一组旋转连接座,旋转盘外径上设置有蜗轮,安装座上安装有收卷电机,收卷电机连接有蜗杆,蜗杆与蜗轮配合连接。
7.根据权利要求1所述的水下打捞作业工具,其特征在于,螺旋推进器设置有三组。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211015436.9A CN115123493A (zh) | 2022-08-24 | 2022-08-24 | 一种水下打捞作业工具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211015436.9A CN115123493A (zh) | 2022-08-24 | 2022-08-24 | 一种水下打捞作业工具 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115123493A true CN115123493A (zh) | 2022-09-30 |
Family
ID=83387396
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211015436.9A Pending CN115123493A (zh) | 2022-08-24 | 2022-08-24 | 一种水下打捞作业工具 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115123493A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117602042A (zh) * | 2024-01-23 | 2024-02-27 | 自然资源部第二海洋研究所 | 一种长续航水下观测设备 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4007816A (en) * | 1974-09-13 | 1977-02-15 | The United States Of America As Represented By The Secretary Of The Navy | Portable salvage lift apparatus |
| CA2353069A1 (en) * | 2001-07-13 | 2003-01-13 | Triton Logging Company Inc. | Method and apparatus for underwater tree cutting and retrieval |
| JP2012030637A (ja) * | 2010-07-29 | 2012-02-16 | M Hikari Energy Kaihatsu Kenkyusho:Kk | 水中重量物の降下および浮上方法 |
| KR101251631B1 (ko) * | 2012-06-21 | 2013-04-08 | 이정훈 | 침몰시 상승 추진력을 제공하는 추진백을 구비한 잠수함 구조시스템 |
| CN206202632U (zh) * | 2016-09-28 | 2017-05-31 | 天津津龙水工海洋工程有限公司 | 一种气控沉物打捞装置 |
| CN108313240A (zh) * | 2018-01-03 | 2018-07-24 | 中广核核电运营有限公司 | 核电站水下状态检查机器人 |
| CN112208717A (zh) * | 2020-11-11 | 2021-01-12 | 上海戍海机电科技有限公司 | 海上多功能智能打捞系统 |
| CN112591055A (zh) * | 2020-12-30 | 2021-04-02 | 浙江海洋大学 | 一种水下机器人 |
| CN212980507U (zh) * | 2020-08-06 | 2021-04-16 | 威海浦鲸智能设备有限公司 | 可调液下作业机器人 |
| CN112722203A (zh) * | 2021-03-16 | 2021-04-30 | 杭州伍磊商贸有限公司 | 一种水下沉船打捞设备 |
-
2022
- 2022-08-24 CN CN202211015436.9A patent/CN115123493A/zh active Pending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4007816A (en) * | 1974-09-13 | 1977-02-15 | The United States Of America As Represented By The Secretary Of The Navy | Portable salvage lift apparatus |
| CA2353069A1 (en) * | 2001-07-13 | 2003-01-13 | Triton Logging Company Inc. | Method and apparatus for underwater tree cutting and retrieval |
| JP2012030637A (ja) * | 2010-07-29 | 2012-02-16 | M Hikari Energy Kaihatsu Kenkyusho:Kk | 水中重量物の降下および浮上方法 |
| KR101251631B1 (ko) * | 2012-06-21 | 2013-04-08 | 이정훈 | 침몰시 상승 추진력을 제공하는 추진백을 구비한 잠수함 구조시스템 |
| CN206202632U (zh) * | 2016-09-28 | 2017-05-31 | 天津津龙水工海洋工程有限公司 | 一种气控沉物打捞装置 |
| CN108313240A (zh) * | 2018-01-03 | 2018-07-24 | 中广核核电运营有限公司 | 核电站水下状态检查机器人 |
| CN212980507U (zh) * | 2020-08-06 | 2021-04-16 | 威海浦鲸智能设备有限公司 | 可调液下作业机器人 |
| CN112208717A (zh) * | 2020-11-11 | 2021-01-12 | 上海戍海机电科技有限公司 | 海上多功能智能打捞系统 |
| CN112591055A (zh) * | 2020-12-30 | 2021-04-02 | 浙江海洋大学 | 一种水下机器人 |
| CN112722203A (zh) * | 2021-03-16 | 2021-04-30 | 杭州伍磊商贸有限公司 | 一种水下沉船打捞设备 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117602042A (zh) * | 2024-01-23 | 2024-02-27 | 自然资源部第二海洋研究所 | 一种长续航水下观测设备 |
| CN117602042B (zh) * | 2024-01-23 | 2024-04-16 | 自然资源部第二海洋研究所 | 一种长续航水下观测设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115556873B (zh) | 一种船舶系泊装置及方法 | |
| EP2978965B1 (en) | Deployment system | |
| CN112407191B (zh) | 一种海洋工程勘探用水下机器人面域打捞捕获装置及方法 | |
| CN111483576B (zh) | 一种载人潜水器水下布放回收大长细比载荷系统 | |
| CN115123493A (zh) | 一种水下打捞作业工具 | |
| CN112591045A (zh) | 救生舱及其使用方法 | |
| CN110185057B (zh) | 一种用于海上风电单桩基础钢管桩起吊立桩的工装及施工方法 | |
| CN114715336A (zh) | 适用于深水的海上风电筒型基础运输安装一体化船舶及安装方法 | |
| CN109866883B (zh) | 一种艇用拖曳声纳的布放回收装置 | |
| CN117433839A (zh) | 一种调控浮力的海洋调查用机器人取样装置 | |
| CN104229100A (zh) | 一种沉船打捞方法及装置 | |
| CN215946597U (zh) | 用于提取海水的提升系统 | |
| CN214648933U (zh) | 救生舱 | |
| CN210151774U (zh) | 一种用于海上风电单桩基础钢管桩起吊立桩的工装 | |
| CN204110339U (zh) | 一种水底作业整体式沉船打捞工具 | |
| CN118083039A (zh) | 一种负浮力重型缆控潜器增程系统 | |
| CN118309843B (zh) | 一种海底管道铺设用牵引沉管装置及方法 | |
| CN221775997U (zh) | 一种自动收放护舷装置 | |
| CN216783785U (zh) | 具有同步回转功能的单臂回转式救生艇降放装置 | |
| CN110329433B (zh) | 一种绞盘式起锚装置 | |
| CN113830268B (zh) | 一种载人潜器自动释放对接装置及操作方法 | |
| CN117184368B (zh) | 一种海上救援用机器化救捞装置 | |
| CN218907572U (zh) | 一种水下逐级充气逐级提升打捞系统 | |
| CN116280102B (zh) | 一种海洋水下辅助救援装置 | |
| CN217231819U (zh) | 一种钢桩定位水上振冲桩施工船 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20220930 |
|
| RJ01 | Rejection of invention patent application after publication |