CN1146805C - 通信型计算机图象动画方法 - Google Patents
通信型计算机图象动画方法 Download PDFInfo
- Publication number
- CN1146805C CN1146805C CNB97113510XA CN97113510A CN1146805C CN 1146805 C CN1146805 C CN 1146805C CN B97113510X A CNB97113510X A CN B97113510XA CN 97113510 A CN97113510 A CN 97113510A CN 1146805 C CN1146805 C CN 1146805C
- Authority
- CN
- China
- Prior art keywords
- mentioned
- data
- action
- skeleton
- animation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T13/00—Animation
- G06T13/20—3D [Three Dimensional] animation
- G06T13/40—3D [Three Dimensional] animation of characters, e.g. humans, animals or virtual beings
Abstract
一种通信型计算机图象动画方法,根据动物的复杂动作、复杂的物理计算结果得到的物体动作、摄像机和光源的复杂动作,真正实现了可再现的3维计算机图象处理、动画。处理1~4由发送侧计算机用存储装置处理,传送数据后,处理5~12由接收侧计算机用存储装置和显示装置处理。处理1、2各动画数据的制作、编辑,处理4、5各动画数据的发送、接收,处理6向存储装置5存储,处理7环境形状数据的初期配置,处理8算出某时刻骨骼构造的位置和形态,处理9把人的形状数据与骨骼构造相结合或生成物体的表面形状数据。
Description
技术领域
本发明属于计算机图象处理动画领域,特别是涉及在计算机间以包含把人和动物等多关节物体和弹性物体等的动作作为时间序列数据记述时的计算机图象动画数据进行通信,用接收侧计算机生成计算机图象处理、动画图象的技术。
背景技术
近年来,通过互连网络的多媒体通信非常盛行。其中,全球电信网(World-Wide-Web:WWW)形成了中心构架。对此,文献[益介,木庭袋圭,“World-Wide-Web”,情报处理学会志,PP1155-1165,Vol.36,No.12.1995.]已经作了说明。
根据已有文献的说明,WWW的中心概念是URL(UniformResource Locators),HTTP(Hyper Text Transfer Protocol),HTML(Hyper Text Markup Language),CGI(Common Gateway Interface)。
URL是在互连网络上统一表述各种资源的记法。HTTP是进行WWW委托人和WWW服务程序通信的通信规定。HTML是记述超级文本的记述语言。CGI是WWW委托人和WWW服务程序的指令对话方法的商定。
根据这些概念对结构予以说明。WWW委托人把通过WWW服务程序的互连网络由URL指定的信息,使用HTTP作为HTML文本取得后,采用称为“ズラゥザ”的显示程序显示在画面上。在该画面上,用户选择连接指令,则对应于该指令的URL即被指定,已被指定的信息通过来自连接指令的WWW服务程序的互连网络,使用HTTP作为HTML文本取得后,显示在画面上。
以上是基本动作。进一步来看,根据CGI,例如用WWW服务程序中的HTTP,当请求“GET/cgi-bin/Command/path HTTP/1.0”时,在WWW服务程序中,环境变数“PATH-INFO”设定为“/path”,实行“Command”。可把在实行该“Command”时标准输出的结果,作为数据返回到已选取的WWW委托人。采用这种结构,WWW担负多媒体通信中心的任务。
但是,上述HTML仅涉及二维图象的记述方法,不能用于三维计算机图象处理。在这种状况下,作为HTML的扩展,记述三维计算机图象处理的记述语言VRML(Virtual Reality Modeling Language)的方法已在1995年5月作了规定。
对此,文献[Mark peace“VRML-Browsing and BuildingCyberspace”,New Riders Publishing,1995.]作了详细说明。其操作基本上与HTML文本的情况是一样的,HTML文本的变化,用VRML记述的数据可作为URL指定的信息得到。
另外,为了表示用VRML记述的数据,专用程序是必要的。在被显示的三维计算机图象处理图象中,进行了视点的变更,在VRML记述方法(Version 1.0)中,不是移动物体的方法,被表示的物体始终是静止的。
在这种情况下,在计算机间通信三维计算机图象处理、动画数据并进行对话,已经考虑了在委托人侧表示的方法。例如,有美国微软公司提出的Active VRML方法。
关于Active VRML已记述在[Microsoft Corporation,“ActiveVRML Reference Manual”,Preliminary Version,1995.]以及[MicrosoftCorporation,“A Brief Introduction to Active VRML”,1995.]中。
然而,用这些方法,对于用简单函数表示的动作,可在计算机间通信数据进行对话,在委托人侧作为三维计算机图象处理、动画图象予以显示,但是,对以人为主的动物的复杂动作、面部表情动作、根据复杂物理计算结果而得出的物体动作、对摄象和光源的复杂动作等,实现真实再现三维计算机图象处理、动画是非常困难的问题。这些动作以函数关系真实表现是非常困难的,即使可以表现,还必须计算须要多少时间。
另外,无论Active VRML,还是VRML都仅仅是单眼视图象,存在不能生成两眼视立体图象的问题。
本发明针对上述问题,在由发送装置、接收装置、上述发送装置和上述接收装置之间的通信媒介组成的系统中,提供了一种计算机图象动画发送接收的复杂动作方法。
为了解决上述问题,根据本发明一种计算机图象动画发送接收的生成方法,是在由发送装置、多个或单个接收装置、上述发送装置和上述接收装置之间的通信媒介组成的系统中,关于所述接收装置接收计算机图象动画的数据和生成图象的方法,其特征是包括:第1阶段,接收所述动画数据,并将其存储在所述接收装置的存储装置中,所述动画数据由物体的形状数据、物体存在环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、按时间序列生成对应于各物体行动的物体动作的时间序列动作数据组成;第2阶段,把图象生成的视点的移动及视线方向、视场角的变更记述为时间序列动作数据,填入所述接收装置的所述存储装置存储的所述动画数据,根据上述时间序列动作数据进行图象生成的视点和视线方向、视场角的变更并进行重现,并且把计算机图象、动画图象显示在显示装置。
附图说明
图1是本发明实施例的系统构成图。
图2是本发明实施例1的计算机图象处理、动画数据发送接收生成方法的处理流程图。
图3是本发明实施例2的计算机图象处理、动画数据发送接收生成方法的处理流程图。
图4是本发明实施例3的计算机图象处理、动画数据发送接收生成方法的处理流程图。
图5是本发明实施例4的计算机图象处理、动画数据发送接收生成方法的处理流程图。
图6是本发明实施例的动画数据构成图。
图7是骨骼构造的说明图。
图8是骨骼构造的说明图。
图9是接头角数据的说明图。
图10是时间序列数据的说明图。
图11是形状数据结合的说明图。
图12是物体表面形状数据生成的说明图。
图13是因事件发生的基本行动状态迁移的说明图。
图14是因事件发生的基本行动状态迁移的说明图。
图15是时间序列基本动作数据变更的说明图。
图16是网格形状变形的说明图。
具体实施方式
实施例1
图1表示实施本发明方法的系统构成。图中,1是发送侧计算机,2是构成发送侧计算机1的存储装置,3是通信媒介,4是接收侧计算机,5是构成接收侧计算机的存储装置,6是作为接收侧计算机和使用者之间接口的显示装置。
根据上述结构的系统,参照图2详细说明本发明实施例1的计算机图象处理、动画数据发送接收生成方法。
如图2所示,全部处理由第1阶段到第7阶段实行。即,第1阶段实行处理1、处理2、处理3,第2阶段实行处理4和处理5,第3阶段实行处理6,第4阶段实行处理7,第5阶段实行处理8,第6阶段实行处理9,第7阶段实行处理10和处理11。
上述处理1进行动画数据制作的处理,处理2进行动画数据编辑的处理,处理3进行向动画数据存储装置存储的处理,处理4进行动画数据发送的处理,处理5进行动画数据接收的处理,处理6进行向存储装置5存储的处理,处理7进行后述的环境形状数据初期配置的处理,处理8算出在该时刻骨骼构造的位置和形态的处理,处理9进行物体(人)的形状数据与骨骼构造相结合的处理、或者生成物体表面形状数据的处理,处理10是用指定的校正方法进行重现的处理,处理11是把重现的计算机图象处理图象显示在显示装置6的处理,处理12是判定结束命令是否生效的处理。处理1到处理4通过发送侧计算机1用存储装置2实行,通过通信媒介3传送动画数据后,处理5到处理12通过接收侧计算机4,用存储装置5和显示装置6实行。
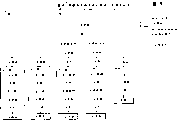
上述处理1制作的动画数据的构成,在形状与物体结合的情况下,如图6(a)所示,即为:骨骼构造、结合形状的数据、环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、时间序列动作数据。另外,与骨骼构造合在一起生成物体表面形状时,如图6(b)所示,即为:骨骼构造、环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、时间序列动作数据。以下对各项目进行说明。
首先,对骨骼构造的说明从用语的说明开始。把由连杆(三维矢量)连接的多个部位(骨骼端部)称为段,特别是由连杆连接的2个部位称为骨架(骨)。由定义可知,段可分解为骨架。段(骨架)和段(骨架)在部位之间连接的部分称为接头(关节)。
由这些段和骨架、接头记述的构造物称为骨骼构造物。为了挪动骨骼构造物,决定骨骼构造物全体的位置和方向的局部座标系(1点和互相正交的3个矢量)是必要的,称其为根部。
根据根部的位置(局部座标系的原点)规定骨骼构造物的全体座标系的位置,根据定义局部座标系座标轴的单位矢量,规定骨骼构造物的正面方向、上方向、横方向。根部认为属于规定骨骼构造物的1个段,如后所述,部位位置(接头位置)由在每段定义的局部座标系规定,根据该局部座标系间的变换列,规定在全体座标系的位置。因此,若根部属于1个段,则段的部位和接头可用根部的局部座标系记述,与不属于的情况比较,变换列可以少一个。所以,根部是特别的部位。
图7(a)、(b)表示上述关系。作为具体的例子,图7(c)是用骨骼构造物表示人的情况。
图7(c)是阶层化表示骨骼构造物。上位阶层骨骼构造物(初步模型骨骼构造物)与下位阶层骨骼构造物(详细模型骨骼构造物)相比,段数和接头数少,因此,与下位阶层骨骼构造物(详细模型骨骼构造物)相比,缺少动作的自由度和平滑性,在进行计算机图象处理、动画时的计算量和时间序列动作数据量就少了。所以要考虑数据量及接收侧计算机性能、动画状况(视点远的情况)等分别使用,以达到有效利用的目的。在图7(c)中,没有括弧的名字是接头名,有括弧的名字是段(骨架)名。
特别称端部为端部部位。这些名字是识别子,因此只要可以识别,可不管符号化。部位名的记述方法,由于接头是根据2个部位来定义的,与这两个部位比较时,接近根部的地方在接头名上附加[部位0],远离的地方附加[部位1],在部位上写名字。图7(c)仅记述了右肘,其它的都省略了。
这种骨骼构造物可用树木构造来记述。图8是用树木构造图示图7(c)的内容。在图8的段中,相当于接头和端部部位的部位除外(或者说不记述重复使用)。这里,采用的树木构造的图示方法如下所述。
(1)规定根部和根部所属的段。
(2)以根部为基准,从近处追寻接头,用段接上追寻到的接头和接头之间。
(3)到了端部部位,对未追寻的其它路径,反复同样的操作。
由于骨骼构造用树木构造表示,因此可用肘节构造的形式记述。该记述形式在1阶层情况下,可用以下处理实现。
(1)段的定义:记述段名,记述规定段的部位名和其初期状态的位置矢量。连杆用该位置矢量表示。该位置矢量的表示方法可通过把每段定义的局部座标系的成分表示和局部座标系轴上的单位矢量变换为部位的位置矢量的4×4行列(齐次座标形式)来进行。局部座标系的原点属于该段的部位中,决定在根部规定路径近处接头的部位(根部属于段的情况,把根部作为原点)。考虑处理动力学等的情况,可附加记述质量和惯性张量、重心位置。这时,在后述的接头角定义中必须予以注意。记述顺序是从树木构造的根部向末端(容易看到)。
(2)接头的定义:接头名和规定接头的2个部位名,根据接头种类和自由度数来定义。接头的种类分为转动系列和滑动系列,自由度数是进行转动和滑动的参数的数目。因为处理3维空间的运动,因此,转动、滑动的最大自由度数分别为3。该自由度数也是后述接头转动角定义的方法的依据。
(3)根部的定义:当根据部位定义时,按段名和部位名记述。不是这种情况时,为从根部追寻路径的最近的段名和部位名,记述在根部规定的局部座标系中的该部位的位置矢量。应注意的是,规定了记述部位的位置矢量时刻的根部局部座标系。
此外,为了进行数据的输入检验,附加记述了总段数和部位数、接头数。
多阶层情况的记述形式,采用了上述单阶层的情况,用以下处理可实现:
(1)主阶层的骨骼构造的记述;
(2)作为子阶层记述开始的识别子(详细骨骼构造记述的识别子)使用条件的记述;
(3)子段的定义:除上述单阶层情况的记述以外,修改主段名;
(4)子接头的定义:与上述记述形式一样;
(5)根部的定义:当子阶层表现变化时,根部变更情况下,用上述要领记述,不是这种情况时,记述未变更的识别子;
(6)在阶层进一步继续情况下,反复(2)-(5)的处理。母子关系是连接在与当前阶层之间(禁止2阶层以上不连续的记述)。
用以上记述形式进行骨骼构造的记述,具体的记述如下:
(1)骨骼构造名的记述;
(2)具体骨骼构造的记述(上述记述形式),在其它文件记述的情况下,记述文件名,
还要追加在处理9时生成骨骼构造物的物体表面形状的情况下的下述(3);
(3)用该段的局部座标系记述用于定义在每段产生的物体表面形状的曲面控制点的座标,此时,在邻接段间的边界进行控制点的共有化,防止接头运转时的断裂。另外,为了防止在接头部断裂,段部要规定另外的曲面形状(参照图12)。具体地说,在上述情况下为:
(段名)(控制点座标值列),……。
在后述情况下为:
(段名)(控制点座标值列)(接头名)(控制点座标值列或球半径),……
下面,对在处理9把物体形状与骨骼构造相结合时的形状数据和环境的形状数据进行说明。
对骨骼构造结合表面形状的情况,记述结合的物体的形状(图6(a)的情况)。无论是结合物体的形状还是环境形状,一般都用三维计算机图象处理,物体的形状由多面形(多角形平面)、网格(三角形网格、四角形网格)、原始形状定义。所谓原始形状为立方体和球等的形状,一般所谓的空间对称性的基本形状。
以哪个物体形状作为原始,应根据其说明的规格。此外,根据称为由花键等定义的曲面和金属球的能量(电位)界面来定义物体形状。简单形状情况下,用单阶层定义形状。这时,使用称为物体座标系的局部座标系。复杂图形情况下,用每个零件确定的局部座标系构成零件形状,再根据把这些零件变换到表示物体全体的局部座标系的映像来构成全体。零件本身是多阶层时,重复上述过程。
环境形状情况下,零件的局部座标系是适当的,而在结合形状情况下,必须用与骨骼构造物的段对应的局部座标系定义零件。自己定义物体形状的情况下,在动画数据制作时用段的局部座标系构成零件。使用市售的物体的形状(事前的某物体形状)的情况下,在动画数据编辑时,寻求把原来使用的局部座标系变换到段的局部座标系的映像(仿射变换)。用该变换的算出方法,指定把构成零件的形状的多面和网格代表点(9点以上)配置在段的何处,用解表示与原位置的对应关系的联立方程式可以求得。
以下是物体形状记述方法的实例:
(1)全体物体形状的名字的记述;
(2)零件形状的名字的记述;
(3)根据上述构成零件形状的多面和网格记述。具体地说,多面和网格的情况为顶点和节点的3维座标值的列,在其它文件记述的情况下,记述文件名,原始情况下,记述原始的名字和中心位置(代表位置)的座标、标度变换量,
在各个构成形状中,记述对应的属性数据和变换座标,原始形状的情况,变换座标可固定化,固定化情况是不必要的,
最后记述向表示零件全体的局部座标系的变换行列,在结合的形状的情况下,记述结合的段名以代替该变换行列;
(4)仅必要的重复(2)和(3)的处理,
骨骼构造物在接头运转时,接合形状在接头部引起断裂,预防的办法是在接头部配置球等原始形状(照图11),这时可用从动侧计算机在描画时自动附加,也可以予先明示,在这种情况下,如上所示,可附加记述:
(5)附加记述接头名和配置在那里的原始形状名、标度量,对于该接头的结合,规定了对应于接头位置的原始内部的点(例如重心)。
防止断裂的其它的方法是使结合2个段的零件形状的边界可变,对应于接头的变化,必须使边界连续变化。
另外,当概略记述和详细记述并用时,可如下记述:
(1)全体物体形状名字的记述;
(2)概略零件形状名字的记述;
(3)根据以上已明示的构成概略零件形状的多面和网格记述,具体地说,多面和网格的情况为顶点和节点的3维座标值列,原始形状的情况下,记述原始形状的名字和中心位置(代表位置)的座标、标度变换量;
记述对应于各个构成形状的属性数据和变换座标。原始形状的情况下,变换座标可固定化,固定化情况是不必要的;
最后记述向表示零件全体的局部座标系的变换行列。在结合的形状的情况下,记述结合的段名以代替该变换行列;
(4)详细记述的识别子和使用条件的记述;
(5)详细零件形状名字的记述;
(6)详细零件形状构成的记述(与上述(3)一样);
(7)仅必要的重复(2)-(6)。
属性数据记述的是物体的反射率(镜面成分、扩散成分)和透明度、织构数据(色数据的分布)、凸度数据(法线矢量的成分分布或变位成分量的分布)和照度分布。反射率和透明度在用常数的情况和分布提供时,可提供每个光源的颜色(RGB和YCbCr等)。相对于分布形数据的屏蔽数据也包含其中。
具体的记述如下:
(1)数据名或识别子的记述;
(2)数据种类的记述;
(3)分布的种类和分布的记述,常数的情况是矩形分布,尺寸为1,分布的种类与矩形分布和三角形分布等的基本形状相配合;
(4)数据(列)的记述,例如,矩形分布时以行列形式记述,但在其它文件上记述时,记述文件名。
作为光源数据,点光源时是初期位置和光源强度、衰减率;线光源时是端点的初期位置、方向矢量、光源强度、衰减率、长度;面光源时是代表点的初期位置、法线矢量、光源强度、衰减率、形状定义、面积。当在各光源附有配光分布时,除上述以外,还要提供配光分布。
具体记述如下:
(1)光源名或识别子的记述;
(2)光源种类的记述;
(3)初期位置的记述;
(4)光源强度的记述;
(5)衰减率的记述;
(6)在线光源情况下记述方向矢量、长度,在面光源情况下记述法线矢量、形状定义(形状名或顶点座标)和面积;
(7)有配光分布的情况,记述配光分布,但在其它文件上记述时,记述文件名。
作为摄像机参数,记述初期位置、初期的视线矢量、上部矢量(表示摄像机上方向的矢量)焦点距离、画面视角。
具体记述如下:
(1)摄像机名或识别子的记述;
(2)记述初期位置,初期的视线矢量、上部矢量(表示摄像机上方向的矢量)焦点距离、画面视角。
作为校正方法,记述进行重现时的具体校正的算法名(或识别子)。也就是是记述引线连接框、平面校正、发光校正、声强校正、滞后重转、照度变换等的名字,或与其对应的识别子。照度变换的情况作为属性数据,仅在提供照度分布的情况下可以使用。也可以进行具有优先顺序的多个记述。优先顺序附有处理时间,以便根据接收侧计算机性能分别使用。
环境设定是进行环境形状初期配置的数据,根据仿射行列记述,具体记述如下:
(1)记述环境的形状物体的名字或识别子;
(2)记述仿射变换行列;
(3)重复环境的形状物体数(1)和(2)的处理;
环境管理控制方法进行物体(骨骼构造物)的运动管理;光源和摄像机运动时也进行该项管理,具体记述如下:
(1)骨骼构造物(光源,摄像机)的名字或识别子的记述;
(2)对应的时间序列动作数据名字的记述。在其它文件存储时,附记该文件名;
(3)重复骨骼构造物(光,摄像机)数(1)和(2)的处理。
下面,说明时间序列动作数据。时间序列动作数据基本上记述骨骼构造物的运动,此外,也记述摄像机和光源的运动。
对骨骼构造物的情况,在连杆长固定时,由根部的仿射变换的时间序列数据和接头角(转动量)的时间序列数据构成。当不固定时,必须附加有关后述连杆的时间序列数据。根部的仿射变换时间序列数据由根部位置即骨骼构造物全体存在的位置以及转动量即骨骼构造物全体的姿势控制量组成。关于根部位置,由整个(全体)座标系的3维座标值(3维位置矢量)提供。关于转动量,存在与接头角同样的各种提供方法。用图9先说明接头角(转动量)的代表的内容,其后说明根部的转动量。
图9(a)、9(b)是由各段定义的局部座标系,是与根部局部座标系平行时(即X、Y、Z各轴的单位矢量与连杆一致)使用的接头角(转动量)。图9(a)是骨骼构造物的初期状态,使连杆在X轴、Y轴、Z轴周围转动时,提供现在时刻连杆状态的转动量。或者,对骨骼构造物的当前时刻状态,使连杆在X轴、Y轴、Z轴周围转动时,提供现在时刻连杆状态的转动量。根据转动的序号,改变转动量,也必须规定转动的顺序。图9(h)是用极座标表示,提供了连杆的Z轴周围的转动量和连杆与Z轴形成的角。无论哪种方法,当连杆长不固定时,必须提供在各时刻的连杆长的时间序列数据。或者相对于连杆长的该当前时刻变化量的时间序列数据。
图9(c),(d)是提供接头角(转动量)的情况,段完全由骨架构成。这时,图9(c)是用欧拉角提供,图9(d)是用偏转、排、间距提供。无论哪种情况,对于连杆的初期状态,都以现在连杆状态的欧拉角、偏转、排列、间距的角度量提供时间序列数据。这时,初期状态的段的局部座标系的任一个轴都与连杆一致(在图9(c)、(d)Z轴一致),在各时刻与连杆一样,局部座标系也移动。因此,用该局部座标系表示的部位的位置,在连杆长固定时是不变的。当连杆长不固定时,除了接头转动外,还将导致接头的滑动(所谓机器人工程学中的滑动关节)。此外,作为接头角(转动量)的提供方法,在机器人工程学领域有著名的DH(Denavit-Hartenberg)表记法。无论哪种方法都应根据各接头的自由度决定角度(可完全转动的3自由度)。根据转动的序号变化各转动量,因此,必须规定序号。
作为根部的转动量,可用图9(a)或图9(b)的方法提供。也就是说,为了在根部决定的局部座标系的原点重合,在平行移动全体座标系时,如图9(a),应提供在全体座标系与根部局部座标系一致的X轴、Y轴、Z轴周围的转动变换中的转动量。图9(b)的情况是提供相对于全体座标系的根部局部座标系各轴的Z轴周围的转动量,以及与Z轴形成角的根部转动量。
如上所述,对于骨骼构造物的时间序列动作数据可根据对于根部的上述矢量和对于段的矢量构成,其数据的记述方法有以下两种方法。
(1)在各时刻完全记述以上矢量;
(2)在全部时刻记述各矢量。
由于在各个时刻都进行描画,因此应注意负荷的数据,(1)的情况对定域的领域存取就可以了,(2)的情况对一定程度分散的领域存取。从这点考虑,(1)的记述方法更好。
对摄像机运动提供的时间序列动作数据是各时刻摄像机位置、视线矢量、记述上部矢量的(3+3+3)维矢量、仿射变换行列、焦点距离、画面视角。这样,即可比所谓的运动控制摄机更好地模拟摄像机的工作。
对光源运动提供的时间系列动作数据,基本上可提供上述关于光源的全部数据。根据不同的目的,例如若是点光源,则提供各时刻的位置和光源强度,可表现萤及夜光虫等移动光源物体。
如上所述,时间序列数据具体记述可按以下方式进行:
(1)时间序列动作数据名的记述;
(2)动作种类(骨骼构造物、摄像机、光源)的记述;
(3)各时刻矢量的记述,应附加记述显示什么(段名和摄像机位置、画面视角等)的矢量的名字和识别子,当数据形式混合时,应附加对数据形式(矢量大小和行列大小)的识别子。
这些实际时间序列动作数据的制作可通过顺、逆活动,顺逆动态,动作的最造化计算,动作捕捉等来进行。以上时间序列动作数据是长时间动作时,把各个动作进行多个组合而制成(参照图10(a))。
动画数据在每个项目记述在可识别该项目的领域(由开始识别子和结束识别子围成的领域)或记述在显示该项目文件名的文件上。
在处理2进行上述动画数据的偏辑。所谓编辑,其目的是进行计算机图象处理。动画的确认和数据调整。关于结合骨骼构造物的物体形状的编辑可按照上述方法进行。关于环境的形状,确认是否建立目的环境形状,确认是否按环境设定配置,并加以适时修正。关于时间序列动作数据,在特别长时间的动作情况下,如上所述,时间序列动作数据可以多个组合各个动作而制成,再进行其连续的调整和确认是否按目的进行了动作,适时修正。在确认时,同时进行属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法的确认。
在处理3,把已确认修正的动画数据存储在存储装置2。
在处理4、处理5,进行存储在存储装置的动画数据的发送接收。发送接收可根据http和ftp进行,以议定出的规则形式,通过通信媒介进行从发送侧计算机1向接收侧计算机4的传送。
在处理6把接收的动画数据存储在接收侧计算机4的存储装置5。
从处理7到处理12用接收侧计算机4进行计算机图象处理。动画图象的生成。以下予以说明。
在处理7,根据在动画数据的环境设定中记述的环境的形状物体的名字或识别子,进行处理的环境的形状物体的判别,根据继续记述的仿射行列,通过变换用物体座标系表示的环境形状数据,向整个(全体)空间的规定位置配置。
也就是说,空间上的配置的形成,实际的处理是座标变换。对全部的环境的形状物体都进行以上处理,把变换的数据暂时存储在存储装置5。
在处理8,根据在动画数据的环境管理控制方法中记述的骨骼构造物(光源、摄像机)的名字或识别子,进行处理的骨骼构造物(光源、摄像机)的判别,根据继续记述的时间序列动作数据的名字或文件名表示的时间序列动作数据,读取该时刻的骨骼构造物(光源、摄像机)的矢量(状态数据)。根据读取的矢量,如果是骨骼构造物的情况时,进行向该时刻的位置的移动(变换),变形为该时刻的骨骼状态(姿势)。这些都要根据在上述每段定义的局部座标系和整个(全体)座标系的变换关系以及局部座标系之间的变换关系来进行。如果是光源(摄像机)的情况,把光(摄像机)移动到时间序列动作数据中记述的该时刻的位置,变更为该时刻的光源(摄像机)参数。以上求得的数据暂时存储在存储装置5。
在处理9,把存储在存储装置5的该时刻骨骼构造物的位置和骨骼状态(姿势)合在一起,与对应的物体形状相结合,或者生成物体的表面形状。与物体形状结合时,如图11所示,根据算出骨骼构造物的位置和骨骼状态(姿势)时使用的全体(整个)座标系和局部座标系的变换、局部座标系之间的变换系列,变换在每段组合的另件形状。
如图11所示,通过在接头部结合球等的形状,堵塞另件形状的断裂。如果是球的情况,则以接头位置为中心,以由另件形状和接头可动范围决定的半径,产生球(或者对物体座标系定义的球,在该位置进行仿射变换)。把已结合的物体形状的数据(已变换的数据)暂时存储在存储装置5。
在产生物体的表面形状的情况,如上所述,在动画数据的骨骼构造中追记的每个段中,对用于产生被定义的另件曲面的控制点,根据向局部座标系的全体(世界)座标系的变换、局部座标系之间的变换系列进行变换,根据变换的控制点产生曲面。
产生的曲面分为原封不动地使用,还是作为近似曲面的网格使用的两种情况。仍保持曲面的情况,由于增大了计算量,一般不用,仅限于重现的方法(以位置。描图为标准的方法),因此,这里仅说明网格化的情况。从控制点产生网络的方法,是使希望产生的定义曲面方程式的2个媒介变数的节点数离散化,把该离散值代入曲面方程式,求出对应的曲面上的点。可把该点作为网格的节点。当控制点在段间共有化时,则在全段生成网格(曲面),并把它存储在存储装置5。当产生防止接头部断裂的形状时,也把它存储在存储装置5。产生的方式与段的情况一样。图12是表示以上处理结果的模式图。
在处理10,根据动画数据中记述的校正方法,用存储在存储装置5的环境形状的配置数据、光源数据、摄像机数据、结合的物体的形状数据或产生的物体的表面形状数据,生成进行重现时刻的图象。重现与通常的计算机图象处理是一样的,生成的图象数据是每个图象元素(象素)的颜色数据(RGB值)。生成的图象数据暂时存储在存储装置5。
在处理11,用在通常计算机图象处理中同样的方法,把存储在上述存储装置5的图象数据表示在表示装置。
在处理12,进行结束命令是否生效的判定。结束命令在处理8到处理11之间生效,在已生效的情况进行插入处理,在存储装置5设定领域代入表示生效的识别记号。看到该识别记号,即可进行结束命令是否生效的判别。
当在处理12判别结束领域生效时,则处理结束;而判别未生效时,反复处理8到处理12。
为了不断进行计算机图象处理,动画,可使时间序列动作数据周期化(使开始和结束相同。周期是时间序列动作数据的长度)。
实施例2
下面参照图3对本发明实施例2的计算机图象处理。动画数据发送接收生成方法进行详细说明。
如图3所示,全体处理由第1阶段到第9阶段实行。即:第1阶段实行处理21和处理22、处理23,第2阶段实行处理24和处理25,第3阶段实行处理26,第4阶段实行处理27,第5阶段实行处理28,第6阶段实行处理29,第7阶段实行处理30和处理31,第8阶段实行处理32,第9阶段实行处理33和处理34。
上述处理21进行动画数据制作处理,处理22进行动画数据编辑处理,处理23进行向动画数据存储装置2的存储处理,处理24进行动画数据发送处理,处理25进行动画数据接收处理,处理26进行向存储装置5的存储处理,处理27进行环境形状数据初期配置处理,处理28进行该时刻是基本行动期间内还是接续期间内的判定处理,处理29是判定在基本行动期间内时算出在该时刻骨骼构造的位置和形态的处理,处理30是判定在接续期间内时生成接续动作的处理,处理31是判定在接续期间内时算出在该时刻的骨骼构造的位置和形态的处理,处理32是把物体(人)的形状数据与骨骼构造相结合的处理,或者是生成物体表面形状数据的处理,处理33是用指定的校正方法进行重现的处理,处理34是把已重现的计算机图象处理图象显示在显示装置的处理,处理35是判定结束命令是否生效的处理。
在上述处理21到处理24是在发送侧计算机1用存储装置2实行的,通过通信媒介3传送动画数据后,从处理25到处理35是在接收侧计算机4用存储装置5和显示装置6实行的。
如图6(c)所示,在形状与物体结合的情况下,上述处理21制作的动画数据的构成是:骨骼构造、结合的形状数据、环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、基本行动、行动规则、时间序列基本动作数据。另外,如图6(d)所示,在与骨骼构造合在一起生成物体表面形状的情况下,其数据构成是:骨骼构造、环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、基本行动、行动规则、时间序列基本动作数据。
骨骼构造、结合的形状数据、环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定都与实施例1的情况相同,这里省略其详细说明,仅说明基本行动、行动规则、时间序列基本动作数据、环境管理控制方法。
所谓基本行动就是分割骨骼构造物一连串动作时的单位动作。例如,坐、站立、步行、踢等都称为基本行动,可由名称或识别子进行判别。由于分割为基本行动是经验分割,因此在一定程度上随使用者不同,其分割单位亦有差别,然而,在以下的处理中,没有对分割单位(分割方法)的依存性,无论哪种分割单位都是可以的。基本行动与时间序列基本动作数据是1对1对应的,对这种对应关系的记述就是基本行动的记述。另外,也可以追记基本行动(时间序列基本动作数据)的行动时间。具体记述如下:
(1)基本行动的名字或识别子的记述;
(2)对应的时间序列基本动作数据的名字或识别子的记述;
(3)上述时间序列基本动作数据的时间(基本行动时间)的记述;
(4)以基本行动数反复(1)到(3)的处理。
另外,若文件开头载明全部基本行动数,则在管理上是方便的。
行动规则记述骨骼构造物实际行动时组合这些基本行动的顺序以及基本行动之间的接续时间。具体记述如下:
(1)识别号码和第1基本行动名字或识别子的记述;
(2)识别号码和第1基本行动与第2基本行动的接续时间(接续帧数)的记述;
(3)识别号码和第2基本行动名字或识别子的记述。
时间序列基本动作数据,如上所述是对应于基本行动的,上述时间序列动作数据的时间很短(以达到单位化),记述形式与时间序列动作数据的情况完全相同。
以上基本行动、行动规则、时间序列基本动作数据也适用于光源、摄像机。
环境管理控制方法进行物体(骨骼构造物)的运动管理。在光源和摄像机运动时,也进行该管理。具体记述如下:
(1)骨骼构造物(光源、摄像机)名字或识别子的记述;
(2)对应的行动规则名字的记述。存储在其它文件时,附记该文件名;
(3)重复骨骼构造物(光源、摄像机)数的(1)和(2)的处理。
在处理22,进行上述动画数据的编辑。这里,所谓的编辑,其目的是进行计算图象处理。动画的确认和数据调整。与骨骼构造物结合的物体形状的编辑与上述相同。关于环境的形状,是确认是否制作目的的环境的形状,确认是否按环境设定配置,再增加适时修正。关于基本行动和行动规则、时间序列基本动作数据,进行是否进行基本行动组合的调整、接续时间的调整和按照目的的行动的确认,并适时修正。在以上确认时,同时进行属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法的确认。
处理23与本发明第1实施例的处理3一样。
处理24与处理25与本发明第1实施例的处理4、处理5一样。
处理26与本发明第1实施例的处理6一样。
处理27到处理35的处理是进行接收侧计算机4的计算机图象处理。动画图象的生成。以下予以说明。
处理27与本发明第1实施例的处理7一样。
在处理28,根据动画数据的环境管理控制方法记述的骨骼构造物(光源,摄像机)的名字或识别子,进行处理的骨骼构造物(光源,摄像机)的判别,进行该骨骼构造物在该时刻是基本行动期间内还是接续期间内的判定。该判定是根据在环境管理控制方法中的骨骼构造物名连续记述的行规则名的行动规则所表示的接续时间,以及该行动规则中记述的基本行动名的基本行动所表示的基本行动时间来进行的。具体地说,把该骨骼构造物第1基本行动时间作为Bti(i=1,2,…),把第i基本行动和第i+1基本行动的接续时间作为Cti(i=1,2,…),当该时刻为T时,按以下顺序进行。
(1)求出Bt1+Ct1+…+Btn+Ctn≤T的最大的n(n=1,2,…);
(2)若(1)中n存在,求dT=T-(Bt1+Ct1+…+Btn+Ctn);
(3)若(2)中dT≤Btn+1,则该时刻是第n+1基本行动期间内的时刻dT的状态。各基本行动从时O开始;
(4)若(2)中Btn+1<dT,则该时刻T是第n+1基本行动和第n+2基本行动接续期间的时刻dT-Btn+1的状态。各接续动作从0开始;
(5)若(1)中n不存在时,
(5-1)若dT≤Bt1,则该时刻是第1基本行动期间内的时dT刻的状态,
(5-2)若Bt1<dT,则该时刻是第1基本行动和第2基本行动接续期间的时刻dT-Bt1的状态。
上述(1)中,在每个构造物,若存储了结束的接续期间的识别号码,则那就是寻求的最大的n。若识别号码从1开始,存储领域的初期状态为0,则可判断存储的识别号码为0时不存在寻求的最大的n。把基本行动或接续期间的时刻暂时存储在存储装置5。
在处理29,当处理28判别为基本行动期间内时,可从对应的时间序列基本动作数据读取该时刻的骨骼构造物(光源、摄像机)的矢量。读取时,利用存储在存储装置5的上述基本行动的时刻。根据读取的矢量,向该时刻的位置移动(变换),变形为该时刻的骨骼状态(姿势)。以上处理通过在每段定义的局部座标系和世界(全体)座标系的变换关系,以及局部座标系之间的变换关系来进行。在光源(摄像机)的情况下,把光源(摄像机)移动到在时间序列动作数据中记述的该时刻的位置,变更为该时刻的光源(摄像机)参数。以上求出的数据暂时存储在存储装置5。
在处理30,当处理28判别为接续期间内时,生成接续动作。参照图10(b)说明接续动作的生成方法。把对应于希望寻求的接续动作前后的基本行动的时间序列基本动作数据作为前基本动作数据、后基本动作数据。全基本动作数据是时间ts,接续时间是te-ts。后基本动作数据从时刻te开始。各时间序列基本动作数据从时刻0开始,后基本动作数据的时间,仅te平行移动。根据这一前提,按以下顺序生成接续动作。
(1)用前基本动作数据的后半部数据,进行时刻te以后的予测。该予测在矢量的各成分进行,用插补后半部数据来寻求,插补采用花键插补等的多项式插补和把三角函数作为规定的秋比采布(チェビチェフ)多项式,成分1的予测曲线为Ai(t);
(2)用后基本动作数据的前半部数据,进行时刻ts以前的予测。该予测在矢量的各成分进行,用插补前半部数据来寻求。成分i的予测曲线为Bi(t)。
(3)在时刻ts是1,在时刻te是0,单调减少且可微分函数为φ(t)时,可根据:
Ai(t)φ(t)+Bi(t)(1-φ(t))
求出各成分在时刻ts到时刻te的接续动作的时间序列接续动作数据。例如,具体的φ(t)j:
φ(t)=(1+cos(π(t-ts)/(te-ts)))/2
然而,(3)在时刻ts是0,在时刻te是1,单调减少且可微分的函数为φ(t)时,可根据:
A(it)(1-φ(t))+Bi(t)φ(t)
求出各成分在时刻ts到时刻te的接续动作的时间序列接续动作数据。例如,具体的φ(t)是:
φ(t)=(1-cos(π(t-ts)/(te-ts)))/2
在处理28判定为接续期间内时,在时间te-ts期间,接续动作继续,因此,接续动作的生成仅在开始进入接续期间内时进行,接续动作结束时,生成时间序列接续动作数据,并把其存储在存储装置5,第2以后不生成接续动作,仅从存储装置5读出。另外,向前的予测曲线、向后的予测曲线都由各自的时间序列基本动作数据固定,因此若计算和存储接续时间的最大值时,可以不按接续的次数计算予测曲线。
在处理31,在骨骼构造物情况下,从处理30生成的接续动作,向该时刻的位置移动(变换),变形为该时刻的骨骼状态(姿势)。上述处理通过在上述每段定义的局部座标系和世界(全体)座标系的变换关系,以及局部座标系之间的变换关系来进行。在光源(摄像机)的情况下,把光源(摄像机)移动到时间序列动作数据记述的该时刻的位置,变更为该时刻的光源(摄像机)参数。以上求出的数据暂时存储在存储装置5。
在处理32,把存储在存储装置5的该时刻的骨骼构造物的位置和骨骼状态(姿势)合在一起,结合对应的物体形状,或者生成物体的表面形状。该处理与本发明第1实施例的处理9一样。
在处理33,根据在动画数据记述的校正方法,使用存储在存储装置5的环境形状的配置数据、光源数据、摄像机数据、结合的物体的形状数据或者产生的物体的表面形状数据,进行重现,生成该时刻的图象。该处理与本发明实施例1的处理10一样。
在处理34,用与通常计算机图象处理同样的方法,把存储在上述存储装置5的图象数据表示在表示装置。
在处理35,进行结束命令是否生效的结束命令生效判定。该处理与本发明实施例1的处理12一样。若结束命令未生效时,则重复处理28到处理35。
为了不断进行计算机图象处理。动画,可使行规则中记述的基本行动周期化(使开始和结束相同。周期是时间序列基本动作数据和接续动作的合计时间)。
实施例3
下面,参照图4详细说明本发明实施例3的计算机图象处理。动画数据的发送接收生成方法。
如图4所示,全体处理在第1阶段到第10阶段实行。即:第1阶段实行处理41和处理42、处理43,第2阶段实行处理44和处理45,第3阶段实行处理46,第4阶段实行处理47,第5阶段实行处理48,第6阶段实行处理49,第7阶段实行处理50,第8阶段实行处理51和处理52,第9阶段实行处理53,第10阶段实行处理54和处理55。
上述处理41进行动画数据的制作处理,处理42进行动画数据的编辑处理,处理43进行向动画数据存储装置2的存储处理,处理44进行动画数据的发送处理,处理45进行动画数据的接收处理,处理46进行向存储装置5的存储处理,处理47进行环境形状数据的初期配置处理,处理48进行关于事件的发生的检出和基本行动的状态迁移的处理,处理49进行该时刻在基本行动期间内还是接续期间内的判定处理,处理50是判定在基本行期间内时算出该时刻的骨骼构造的位置和形态的处理,处理51是判定在接续期间内时生成接续动作的处理,处理52是判定在接续期间内时算出该时刻骨骼构造的位置和形态的处理,处理53是把物体(人)的形状数据与骨骼构造相结合的处理或者生成物体表面形状数据的处理,处理54是用指定的校正方法进行重现的处理,处理55是把已处理的计算机图象处理图象显示在显示装置的处理,处理56是判定结束命令是否生效的处理。
上述处理41到处理44是通过发送侧计算机1,用存储装置2实行的,通过通信媒介3传送动画数据后,处理45到处理56是通过接收侧计算机4,用存储装置5和表示装置6实行的。
如图6(c)所示,当把形状与物体结合时,在处理41制作的动画数据的构成是:骨骼构造、结合的形状数据、环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、基本行动、行动规则、时间序列基本动作数据。另外,如图6(d)所示,与骨骼构造合在一起生成物体表面形状情况下,其数据构成是:骨骼构造、环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、基本行动、行动规则、时间序列基本动作数据。
关于结合的形状数据、环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、基本行动、时间序列基本动作数据,与上述实施例2的说明相同,这里省略其说明,仅对骨骼构造、行动规则、环境管理控制方法予以说明。
关于骨骼构造,在上述实施例1、2的骨骼构造中,追记了对外界读出的项目。设置了视觉和触觉的传感器。对视觉来说,以相当于眼前的部分(地点)为中心,把组合了球或球的大园的扇型的3维领域定义为读出领域。关于触觉,把手边的地点为中心的球领域定义为读出领域。具体地说,是在实施例1、2的骨骼构造记述中追记以下记述:
(A)传感器种类(视觉或触觉)的识别子记述;
(B)中心地点名的记述;
(C)领域定义的记述。
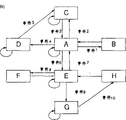
在骨骼构造物组合了基本行动而进行行动时,行动规则记述这些基本行动之间的状态迁移和引起该状态迁移的事件,以及状态迁移时接续动作的接续时间。这里所谓的事件是对上述骨骼构造的读出,以及鼠标器和键盘的外部输入。
图13是基本行动状态迁移图的例子。行动规则记述了该状态迁移图。具体记述如下:
(1)第1基本行动的名字或识别子的记述,附记事件未发生时以反复该基本行动的状态待机类型的基本行动、或无条件向其它基本行动迁移类型的基本行动的类型识别子,
(2)状态迁移的记述,
(2-1)事件识别子的记述,
(2-2)事件发生后迁移前的基本行动名字或识别子的记述,行动前是无条件向其他基本行动迁移类型的基本行动时,记述返回前的基本行动名字或识别子,
(2-3)接续时间(接续帧数)的记述,行动前是无条件无条件向其他基本行动迁移类型的基本行动时,记述该返回前基本行动的接续时间;
(3)第2基本行动名字或识别子和类型识别子的记述。
环境管理控制方法进行物体(骨骼构造物)的运动管理和事件管理。光源和摄像机运动时也进行该管理。具体记述如下:
(1)骨骼构造物(光源、摄像机)名字或识别子的记述;
(2)对应的行动规则名字的记述,保存于其它文件时,附记该文件名;
(3)使用的事件识别子的记述,包含无条件向其他基本行动迁移类型的基本行动时,记述表示其情况的识别子;
(4)按骨骼构造物(光源、摄像机)数,反复(1)到(3)的处理;
(5)事件识别子和该事件发生的判定条件的记述。
在处理42,进行上述动画数据的编辑。这里的所谓编辑,是确认进行计算机图象处理。动画以及数据的调整。关于与骨骼构造物结合的物体形状的编辑与上述方法一样。关于环境的形状,目的是确认是否制作目的环境的形状,确认是否按环境设定为配置,增加适时修正。关于基本行动和行动规则、时间序列基本动作数据,是进行是否进行基本行动的组合和迁移的调整、接续时间的调整、按照目的的动作的确认,并适时修正。在上述确认时,同时进行属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法的确认。
处理43与上述实施例1的处理3一样。
处理44和处理45与上述实施例1的处理4、处理5一样。
处理46与上述实施例1的处理6一样。
处理47到处理56的处理是进行接收侧计算机4的计算机图象处理。动画图象的生成。以下予以说明。
处理47与实施例1的处理7一样。
在处理48,进行关于事件发生的检出和基本行动的状态迁移的处理。
作为处理的前提,对各骨骼构造物,写入现在状态的领域应确保在存储装置5中。在该领域,现在的状态以环路进行基本行动时,存储动作的基本行动名字或识别子和时间序列基本动作数据的现在状态的时刻,在迁移情况下,存储表示迁移中的识别子和迁移前后的基本行动名字或识别子以及迁移开始时刻、接续时间。迁移中的写入在事件发生的时刻立即进行。
在无条件向在其他基本行动中移动的类型的基本行动迁移时,存储表示迁移中的识别子(与上述不同的识别子)、原来的基本行动、经由的基本行动和经由后的基本行动的名字或识别子、经由的基本行动前后的接续时间,把事件发生后(该时刻)到移动至经由后的基本行动称为迁移中。
关于事件的检出,是检验在动画数据的环境管理控制方法中记述的事件发生的判定条件,找出该事件,存储该事件的识别子。从环境管理控制方法的记述中找出对应于存储的事件识别子的骨骼构造物(光源、摄像机)和行动规则,存储该行动规则的名字或识别子。关于基本行动的迁移,找出对应于存储的行动规则名字或识别子的行动规则。该处理在存储装置5进行,结果写入在每个骨骼构造物设置的表示现在状态的领域。关于现在状态迁移中的骨骼构造物,事件的发生可以忽略。
在处理49,进行处理的骨骼构造物(光源、摄像机)在时刻T是基本行动期间内还是接续时间内的判定。该判定参照在上述各骨骼构造物中设置的现在状态来进行。若不是状态迁移中,则判定为存储的基本行动期间内。对状态迁移中的骨骼构造物,判定是否在向无条件在其他基本行动中移动的类型的基本行动迁移中,若不是这种情况,则判定为接续期间中。接续时间为Ct0、迁移开始时刻为Ts、该时刻为T时,判定为接续期间中的T-Ts状态。特别是T=Ts+Ct0时,把表示现在状态的领域的迁移中基本行动的识别子变更为先前基本行动名称为识别子,使时间序列基本行动数据中的现在时刻为1,把判定结果变更到基本行动期间内。
在向无条件在其他基本行动中移动的类型的基本行动迁移中的情况下,经由的基本行动的动作时间为Bt、其前后的接续时间为Ct0,Ct1、迁移开始时刻为Ts,则在该时刻为T(Ts<T≤Ct0+Bt+Ct1)时,按以下顺序进行。
(1)若T<Ts+Ct0,则为进行的接续动作接续期间中的时刻T-Ts状态。各接续动作从时刻0开始。
(2)若Ts+Ct0≤T<Ts+Ct0+Bt,则为经由的基本行动期间中的时刻T-(Ts+Ct0)状态。基本行动从时刻0开始。
(3)若Ts+Ct0+Bt≤Ts+Ct0+Bt+Ct1,则为返回的接续动作接续期间中的时刻T-(Ts+Ct0+Bt)状态。特别是T=Ts+Ct0+Bt+Ct1时,把表示现在状态的领域的迁移中的识别子变更为经由后基本行动的名字或识别子,使表示时间序列基本动作数据中的现在状态的时刻为-1,把判定结果变更在基本行动期间内。
在处理50,当在处理49判别为基本行动期间内时,则从对应的时间序列基本动作数据,读取该时刻的骨骼构造物(光源、摄像机)的矢量(状态数据)。读取的方法是在存储装置5存储的每个基本行动中确保的现在时刻增加1的时刻的矢量相对应的时间序列基本动作数据中读取。读取后,更新现在的时刻。如果现在的时刻超过时间序列基本动作数据为最大值的时刻,则矢量为0(为最大值刻+1的剩余)。这样,时节动作就可能了。根据读取的矢量,若为骨骼构造物的情况,则向该时刻的位置移动(变换),变形为该时刻的骨骼状态(姿势)。
上述处理根据上述每段定义的局部座标系和世界(全体)座标系的变换关系以及局部座标系之间的变换关系来进行。若为光源(摄像机)时,把光源(摄像机)移动到时间序列动作数据记述的该时刻的位置,变更为该时刻的光源(摄像机)参数。把以上求得的数据存储在存储装置5。
在处理51,当在处理49判别为接续期间内时,根据必要生成接续动作。也就是说,如前所述,以无条件向其他基本行动移动的类型的基本行动,判定为迁移中时,则经由的基本行动期间中没有必要生成接续动作,采用对应于经由基本行动的时间序列基本动作数据。接续动作生成的算法基本上与实施例2的处理30一样,这一点说明在前基本动作数据中间与后基本动作数据连接的必要性。因此,向后予测曲线的生成方法是不同的。
当前基本动作数据为最大的时刻是ts,接续时间是tc,在时刻T≤ts时,有必要生成接续动作。这时,
(1)若T=ts,与实施例2的处理30一样;
(2)若te≤ts-T,把从时刻T开始的te分的前基本动作数据(未实行的剩余数据)作再向后予测曲线利用;
(3)若ts-T<te,把从时刻T开始到ts的前基本动作数据,与用实施例2的处理30的方法在时间te-(ts-T)分生成的向后予测曲线组合使用。
关于向前予测曲线,与实施例2的处理30所说明的一样,可用于前面的计算。若在前基本动作数据中间,不进行事件处理(即前基本动作数据移到完成后接续处理),则可用与实施例2的处理30完全一样的方法生成接续曲线。
在处理52,根据处理51生成的接续动作(经由中的情况是对应于经由的基本行动的时间序列基本动作数据),若是骨构造的情况,向该时刻的位置移动(变换),变形为该时刻的骨骼状态(姿势)。上述处理根据在上述每段定义的局部座标系和世界(全体)座标系的变换关系,以及局部座标系之间的变换关系来进行。若为光源(摄像机)时,把光源(摄像机)移动到时间序列动作数据记述的该时刻的位置,变更为该时刻的光源(摄像机)参数。以上求得的数据存储在存储装置5。
在处理53,把存储在存储装置5的该时刻骨骼构造物的位置和骨骼状态(姿势)合在一起,结合对应的物体形状,或者生成物体的表面形状。该处理与实施例1的处理9一样。
在处理54,根据动画数据记述的校正方法,使用存储在存储装置5的环境形状的配置数据、光源数据、摄像机数据、结合的物体的形状数据、或者产生的物体的表面形状数据,进行重现,生成该时刻的图象。该处理与实施例1的处理10一样。
在处理5S,用通常计算机图象处理的同样方法,把存储在存储装置5的图象数据显示在显示装置。
在处理56,进行结束命令是否生效的结束命令生效判定。该处理与实施例1的处理12一样。结束命令未生效时,反复处理48到处理56。
实施例4
下面,参照图5详细说明本发明实施例4的计算机图象处理,动画数据发送接收生成方法。
如图5所示,全体处理在第1阶段到第10阶段实行。也就是说,第1阶段实行处理61和处理62、处理63,第2阶段实行处理64和处理65,第3阶段实行处理66,第4阶段实行处理67,第5阶段实行处理68,第6阶段实行处理69,第7阶段实行处理70和处理71,第8阶段实行处理72、处理73、处理74,第9阶段实行处理75,第10阶段实行处理76和处理77。
上述处理61进行动画数据的制作处理,处理62进行动画数据的编辑处理,处理63进行向动画数据存储装置2的存储处理,处理64进行动画数据的发送处理,处理65进行动画数据的接收处理,处理66进行向存储装置5的存储处理,处理67进行环境形状数据的初期配置处理,处理68进行关于事件发生的检出和基本行动的状态迁移处理,处理69进行该时刻是基本行动期间内还是接续期间内的判定处理,处理70是判别环境状态并变更时间序列基本动作数据的处理,处理71是判定为基本行动期间内时算出该时刻骨骼构造的位置和形态的处理,处理72进行环境状态的判别处理,处理73是判定为接续期间内时考虑环境状态并生成接续动作的处理,处理74是判定为接续期间内时算出该时刻骨骼构造的位置和形态的处理,处理75是使物体(人)的形状数据与骨骼构造相结合的处理或者是生成物体表面形状数据的处理,处理76是用指定的校正方法进行重现的处理,处理77是把已重现的计算机图象处理表示在表示装置的处理,处理78是结束命令是否生效的判定处理。
上述处理61到处理64是通过发送侧计算机1用存储装置2实行,通过通信媒介3传送动画数据后,处理65到处理78是通过接收侧计算机4用存储装置5和显示装置6实行。
如图6(c)所示,当形状与物体相结合时,处理61制作的动画数据的构成是:骨骼构造、结合的形状数据、环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、基本行动、行动规则、时间序列基本动作数据。另外,如图6(d)所示,与骨骼构造合在一起生成物体的表面形状时,其数据构成是:骨骼构造、环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、基本行动、行动规则、时间序列基本动作数据。
关于骨骼构造、结合的形状数据、环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、基本行动、时间序列基本动作数据,与上述实施例3的说明相同,这里省略其说明,仅对行动规则、环境管理控制方法予以记述。
本实施例4的行规则是在上述实施例3说明的行动规则中,再附记相对于环境的状态条件的基本行动变更和接续动作变更的参数。后面将说明具体的基本行动变更方法以及基本行动变更参数。
图14表示基本行动状态迁移图的例子。行动规则记述了该状态迁移图。与本发明第3实施例不同点是:在事件发生时,再观察环境状态,根据该环境状态,在迁移前的基本行动中增加变更。行动规则的具体记述如下:
(1)第1基本行的名字或识别子的记述,事件未发生时,也要附记类型识别子:是反复该基本行动状态的待机类型的基本行动,还是无条件向其他基本行动迁移类型的基本行动;
(2)状态迁移的记述;
(2-1)事件识别子的记述,
(2-2)事件发生后迁移前的基本行动名字或识别子的记述,若进行前是无条件向其他基本行动迁移类型的基本行动时,则也要记述返回前的基本行动名字或识别子,
(2-3)接续时间(接续帧数)的记述,当进行前是无条件向其他基本行动迁移类型的基本行动时,则对返回前的基本行动也应记述接续时间;
(3)环境的状态条件的记述;
(3-1)环境的状态条件的识别子的记述;
(3-2)基本行动变更识别子和变更参数的记述;
(3-3)接续动作变更识别子和变更参数的记述;
(4)第2基本行动名字或识别子和类型识别子的记述。
环境管理控制方法进行物体(骨骼构造物)的运动管理和事件管理,以及根据环境状态条件的基本行动的变更。光源和摄像机运动时也进行该项管理。具体记述如下:
(1)骨骼构造物(光源、摄像机)名字或识别子的记述;
(2)对应的行动规则名字的记述,当存储在其他文件时,也应附记该文件名;
(3)使用的事件识别子的记述,若包含无条件向其他基本行动迁移类型的基本行动时,应记述表示它的识别子;
(4)按骨骼构造物(光源、摄像机)数,反复(1)到(3)的处理;
(5)事件识别子和该事件发生的判定条件的记述,对全部事件进行记述;
(6)环境状态条件的识别子和其判定条件的记述,对全部环境状态条件进行记述。
在处理62,进行上述动画数据的编辑。这里的所谓编辑,目的是确认进行计算机图象处理。动画以及数据的调整。关于与骨骼构造物结合的物体形状的编辑与上述方法一样。关于环境的形状,目的是确认是否制作目的环境的形状,确认是否按环境设定为配置,增加适时修正。关于基本行动和行动规则、时间序列基本动作数据,是进行是否根据基本行动的组合和迁移的调整、接续时间的调整、环境的状态条件适当变更动作,是否按目的进行动作的确认,并适时修正。在上确认时,同时进行属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法的确认。
处理63与上述实施例1的处理3一样。
处理64和处理65与上述实施例1的处理4、处理5一样。
处理66与上述实施例1的处理6一样。
处理67到处理78进行接收侧计算机4的计算机图象处理。动画图象的生成。以下进行说明。
处理67与上述实施例1的处理7一样。
在处理68,进行有关事件发生的检出和基本行动状态迁移的处理。该处理与上述实施例3一样。
如实施例3所示,在写入相对于存储装置5确保的各骨骼构造物的现在状态的领域,当基本行动变更时,存储表示在变更的基本行动时间序列基本动作数据存储装置5中的所在地名字或识别子(地址)、现在状态的时刻。在迁移中情况下,存储表示迁移中的识别子,以及表示在对应于接续动作的时间序列数据存储装置5中的所在地名字或识别子(地址)。迁移中的识别子写入事件发生后(该时刻)。
在无条件向在其他基本行动中移动类型的基本行动迁移时,存储表示迁移中的识别子(提供与上述不同的识别子)、表示在与经由前的接续动作对应的时间序列数据存储装置5中的所在地名字或识别子(地址)、经由的基本行动(在变更的情况下,表示在对应于变更的基本行动的时间序列基本动作数据存储装置5中的所在地名字或识别子)和经由后的基本行动名字或识别子,把从事件发生后(该时刻)到移动至经由后的基本行动作迁移中。
在处理69,进行处理的骨骼构造物(光源,摄像机)的该时刻,是在基本行动期间内还是在接续时间内的判定。该判定参照在上述各骨骼构造物设置的现在状态来进行。不是状态迁移中时,判定为存储的基本行动期间内。
在处理70,当处理69判别为基本行动期间内时,对于各骨骼构造物,如果现在状态是基本行动(时间序列基本动作数据)的最终时刻,则根据环境管理方法以及该骨骼构造物的行动规则的记述,进行环境是否适合任何环境状态条件的确认处理。根据该确认处理,当适合任何条件时,则进行基本行动(对应的时间序列基本动作数据)的变更。下面说明基本行动的具体变更方法。
基本行动的变更有:与时间有关的动作的伸长和压缩、原来动作经由点的变更、2个动作的合成、骨骼构造的部分构造的动作的交换。根据图15(a)、(b)说明与时间有关的动作的伸长和压缩。
图15(a)表示与时间有关的伸长。关于对应于原基本行动的时间序列基本动作数据,当时刻数(帧数)为F、动作时间为T时,把该时刻数变更为F’>F,时间即伸长了。首先,根据原时间序列基本动作数据生成插补曲线(由多项式插补等生成),求出每个时刻T/F’的插补曲线值,生成新的时间序列数据,制作成时间伸长的时间序列基本动作数据。图15(b)表示与时间有关的压缩。这时,使条件为F’<F,可用与伸长相同的方式实现。作为变更参数,对F’或F提供标度量。当这些参数是常数时,形成固定的变更,当这些变更参数是变数时,可提供适应该状况的值。
图15(c)表示变更原动作经由点的情况。提供变更经由点的键控时刻(图15(c)的tp,tq)和变更值,以及包含该时刻的变更时间,用该时间前后的数据和键控时刻的数据生成插补曲线,从插补曲线求出在变更时间的键控以外时刻的值,生成变更的时间系列基本动作数据。这时的变更参数是键控时刻列和与其对应的变更值列及变更时间。与关于上述时间的伸长、压缩一样,当这些参数与常数时,形成固定变更,当定义为变数时,若提供了每次变更的值,则可实现与该情况相适应的动作变更。
图15(d)表示根据在实施例2所示2个动作的处理30的接续加权函数的2个动作的合成。首先用关于上述时间的伸长、压缩,把两方动作时刻数(帧数)合在一起。首先,再根据在实施例2的处理30所示动作接续中采用的接续加权函数进行合成。也就是说,使调整了时刻数的2个动作为A(t)、B(t),使接续加权函数为φ(t)时,根据
A(t)φ(t)+B(t)(1-φ(t))生成合成动作。这样,从A(t)渐渐变化为B(t)的动作。上式中,若φ(t)=(0和1之间的常数),则为稳定合成。变更参数分别是时刻数F、合成的基本行动名字或识别子、表示合成方法(接续加权、稳定合成)的识别子(使合成方法符号化)。当把时刻数F、合成的基本行动识别子(这时用名字处理是困难的)、合成方法的识别子作为变数提供时,则相应于该情况的合成动作的生成是可能的。
对于骨骼构造的部分构造动作的交换,用与上述时间相关的伸长和压缩,使交换后动作的时刻数与交换前动作的时刻数相一致,就可以交换部分构造的动作。这时是与部分构造的名字或识别子交换的基本动作的名字或识别子。若以变数提供这些参数(识别子)时,则相应于该情况的动作的变更是可能的。
处理71是根据变更的时间序列基本动作数据或原来的时间序列基本动作数据,读取该时刻骨骼构造物(光源、摄像机)的矢量(状态数据)。读取的方法是:从对应于在存储装置5存储的各基本行动确保的现在时刻上加1时刻的矢量的时间序列基本动作数据中读取。读取后,更新现在时刻。如果现在的时刻是超过时间序列基本动作数据最大值的时刻,则为0(时刻的最大值+1的剩余)。这样,肘节动作即为可能。根据读取的矢量,在骨骼构造物情况,向该时刻的位置移动(变换),变形为该时刻的骨暖和状态(姿势)。
上述处理是根据在上述每段定义的局部座标系和世界(全体)座标系的变换关系,以及局部座标系之间的变换关系来进行的。在光源(摄像机)的情况下,把光源(摄像机)移动到时间序列动作数据记述的该时刻的位置,变更为该时刻光源(摄像机)参数。以上求得的数据存储在存储装置5。
在处理72,当处理69判别为接续期间时(即,迁移中),则在事件发生后(该时刻),判别相对于此时迁移前基本行动的环境状态条件。在无条件向其他基本行动移动类型的基本行动中,对事件发生后立即迁移中的情况,应进行对于经由的基本行动的环境状态条件和对于经由后的基本动作的环境状态条件的判别。
在处理73,在迁移中而且是事件发生后,则根据处理72的判别结果生成接续动作,并把其名字或识别子(地址)和接续时间、生成的时间序列接续动作数据存储在存储装置5。除此以外的情况,不必生成接续动作。
接续动作的生成方法是:当处理72的环境状态条件的判别结果是没有必要变更后基本行动(对任何环境状态条件都不适合)时,与实施例3的处理51一样。当处理72的环境状态条件的判别结果是有必要变更后基本行动时,则在变更后基本动作数据后,对该变更的后基本动作数据,用与实施例3的处理51同样的方法,生成接续动作,再根据行动规则所示的变更方法和接续动作变更参数,以上述动作变更方法变更生成的接续动作。
特别是在无条件向其他基本行动移动类型的情况下,对经由的基本行动、经由后的基本行动都进行上述同样的处理,生成2个接续动作。生成的接续动作,把其名字或识别子和接续时间、生成的时间序列接续动作数据存储在存储装置5。
在经由后的基本行动变更时,初次使用变更的时间序列基本动作数据。
在处理74,根据处理73生成的接续动作(经由动作中的情况是对应于经由基本行动的变更的时间序列基本动作数据或原来的时间序列基本动作数据),在骨骼构造物的情况下,向该时刻的位置移动(变换),变形为该时刻的骨骼状态(姿势)。上述处理是根据在上述每段定义的局部座标系和世界(全体)座标系的变换关系,以及局部座标系之间的变换关系来进行的。在光源(摄像机)的情况下,把光源(摄像机)移动到时间序列动作数据中记述的该时刻的位置,变更为该时刻光源(摄像机)参数。以上求得的数据存储在存储装置5。
在处理75,把存储在存储装置5的该时刻的骨骼构造的位置和骨骼状态(姿势)合在一起,结合对应的物体形状,或生成物体的表面形状。该处理与实施例1的处理9一样。
在处理76,按动画数据中记述的校正方法,用存储在存储装置5的环境形状的配置数据、光源数据、摄像机数据、结合的物体的形状数据或产生的物体的表面形状数据,进行重现并生成该时刻的图象。该处理与实施例1的处理10一样。
在处理77,用与通常计算机图象处理同样的方法,把存储在上述存储装置5的图象数据显示在显示装置。
在处理78,进行结束命令是否生效的结束命令生效判定。该处理与本发明实施例1的处理12一样。结束命令未生效时,反复处理68到处理78。
在上述本发明的实施例1到4中,接收侧计算机可以是多台。在使用现状的ftp和http情况下,从有发送要求的接收侧计算机,顺序传送动画数据。为了一次把动画传送到多个接收侧计算机,扩弃ftp和http,还要附加广播功能。
在上述实施例1到4是以骨骼构造的动作为例的,然而,如图16(a)所示,用同样的方法,也可适用于网格的动作。这时,用时间序列(基本)动作数据移动黑圈表示的节点(参照图16(b))。这样,对旗等布基材的动作,以及面部表情等的变化的计算机图象处理。动画也可适用。
如上所述,本发明的上述构成,提供了一种计算机图象处理。动画图象的生成方法:在由发送侧计算机、接收侧计算机、上述发送侧计算机和上述接收侧计算机之间的通信媒介组成的系统中,通过计算机图象处理。动画数据的发送接收以及上述接收侧计算机,可以处理从以人为主的动物复杂动作及面部表情、复杂物理计算结果得到的物体动作、摄像机和光源的复杂动作。
Claims (12)
1、一种计算机图象动画发送接收的生成方法,是在由发送装置、多个或单个接收装置、上述发送装置和上述接收装置之间的通信媒介组成的系统中,关于所述接收装置接收计算机图象动画的数据和生成图象的方法,其特征是包括:
第1阶段,接收所述动画数据,并将其存储在所述接收装置的存储装置中,所述动画数据由物体的形状数据、物体存在环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、按时间序列生成对应于各物体行动的物体动作的时间序列动作数据组成;
第2阶段,把图象生成的视点的移动及视线方向、视场角的变更记述为时间序列动作数据,填入所述接收装置的所述存储装置存储的所述动画数据,根据上述时间序列动作数据进行图象生成的视点和视线方向、视场角的变更并进行重现,并且把计算机图象、动画图象显示在显示装置。
2、根据权利要求1所述的计算机图象动画发送接收的生成方法,其特征是:
在第1阶段接收所述动画数据,并将其存储在所述接收装置的存储装置中,所述动画数据由物体的形状数据、物体存在环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、各物体的基本行动、各物体的行动规则、按时间序列生成对应于各物体行动的物体动作的时间序列动作数据组成;
在第2阶段,根据在上述接收装置的上述存储装置的上述动画数据的所述行动规则,使多个上述时间序列基本动作数据动作接续,并生成物体动作。
3、根据权利要求1所述的计算机图象动画发送接收的生成方法,其特征是:
在第1阶段接收所述动画数据,并将其存储在所述接收装置的存储装置中,所述动画数据由多关节物体的骨骼构造、与上述骨骼构造结合的形状数据、物体存在环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、按时间序列生成上述骨骼构造的动作的时间序列动作数据组成;
在第2阶段,从存储在上述接收装置的存储装置中的上述动画数据的上述时间序列动作数据,算出在该时刻的上述骨骼构造的位置和形态,并把存储在上述接收装置的存储装置中的上述动画数据的上述形状数据与第2阶段的上述骨骼构造的位置和形态结合在一起。
4、根据权利要求1所述的计算机图象动画发送接收的生成方法,其特征是:
在第1阶段接收所述动画数据,并将其存储在所述接收装置的存储装置中,所述动画数据由多关节物体的骨骼构造、与上述骨骼构造结合的形状数据、物体存在环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、按时间序列生成上述骨骼构造的动作的时间序列动作数据组成;
在第2阶段,从存储在上述接收装置的存储装置中的上述动画数据的上述时间序列动作数据,算出在该时刻的上述骨骼构造的位置和形态,并结合上述骨骼构造的位置和形态,生成物体表面形状。
5、根据权利要求1所述的计算机图象动画发送接收的生成方法,其特征是:
在第1阶段将动画数据存储在所述接收装置的存储装置中,所述动画数据由多关节物体的骨骼构造、与上述骨骼构造结合的形状数据、物体存在环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、各物体的基本行动、各物体的运动规则、按时间序列生成对应于上述基本行动的上述骨骼构造的动作的时间序列基本动作数据组成;
在第2阶段,从存储在上述接收装置的存储装置中的上述动画数据的上述行动规则,对该时刻进行在基本行动期间内还是在接续期间内的判定,在判定为基本行动期间内时,对应于该时刻的基本行动,根据存储在上述接收装置的存储装置中的上述动画数据的上述时间序列基本动作数据,算出该时刻的上述骨骼构造的位置和形态,在判定为接续期间内时,根据上述接续期间前后存储在上述接收装置的存储装置中的上述动画数据的上述时间序列动作数据,算出上述接续期间的所述骨骼构造的动作,并算出该时刻的上述骨骼构造的位置和形态。
6、根据权利要求1所述的计算机图象动画发送接收的生成方法,其特征是:
在第1阶段将动画数据存储在所述接收装置的存储装置中,所述动画数据由多关节物体的骨骼构造、与上述骨骼构造结合的形状数据、物体存在环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、各物体的基本行动,表示对应于事件发生的物体行动状态迁移的行动规则、按时间序列生成对应于上述基本行动的上述骨骼构造的动作的时间序列基本动作数据组成,
在第2阶段,根据存储在上述接收装置的存储装置中的上述动画数据的上述环境管理控制方法,检出事件发生,并依据上述行动规则对事件的发生进行基本行动的状态迁移决定,根据存储在上述接收装置存储装置的上述动画数据的上述行动规则,对该时刻进行在基本行动期间内还是在接续期间内的判定,在判定为基本行动期间内时,对应于该时刻的基本行动,根据存储在上述接收装置的存储装置中存储的上述动画数据的上述时间序列基本动作数据,算出该时刻的上述骨骼构造的位置和形态,在判定为接续期间内时,根据上述接续期间前后存储在上述接收装置存储装置的上述动画数据的上述时间序列动作数据,算出上述接续期间的骨骼构造的动作,并算出该时刻的上述骨骼构造的位置和形态。
7、根据权利要求1所述的计算机图象动画发送接收的生成方法,其特征是:
在第1阶段将动画数据存储在所述接收装置的存储装置中,所述动画数据由多关节物体的骨骼构造、与上述骨骼构造结合的形状数据、物体存在环境的形状数据、属性数据、光源数据、摄像机参数、校正方法、环境设定、环境管理控制方法、各物体的基本行动,表示对应于事件发生的物体行动状态迁移的行动规则、按时间序列生成对应于上述基本行动的上述骨骼构造的动作的时间序列基本动作数据组成;
在第2阶段,根据存储在上述接收装置存储装置的上述动画数据的上述环境管理控制方法,检出事件的发生,并依据上述行动规则对事件的发生进行基本行动的状态迁移决定,根据存储在上述接收装置的存储装置的上述动画数据的上述行动规则,对该时刻进行在基本行动期间内还是在接续期间内的判定,在判定为基本行动期间内时,根据存储在上述接收装置的存储装置的上述动画数据的上述环境管理控制方法,判别在进行上述基本行动时间中的环境状态条件,根据上述判别结果,进行对应于上述基本行动的上述时间序列基本动作数据的变更,再从已变更的上述时间序列基本动作数据算出在上述该时刻的上述骨骼构造的位置和形态,在判定为接续期间内时,根据上述接续期间前后存储在上述接收装置存储装置的上述动画数据的时间序列动作数据以及上述环境管理控制方法,从判别在上述接续期间的环境状态条件的结果,算出上述接续期间的上述骨骼构造的动作,并算出上述该时刻的上述骨骼构造的位置和形态。
8、根据权利要求1所述的计算机图象动画接收的生成方法,其特征是:
在第2阶段,指定两眼视差和两眼视线方向,根据上述两眼视差和上述两眼视线方向的指定,形成立体的计算机图象、动画图象。
9、根据权利要求1所述的计算机图象动画接收的生成方法,其特征是:
在第2阶段,把图象生成的视点的移动及视线方向、视场角的变更记述为时间序列动作数据,接续上述时间序列动作数据,并同时进行图象生成的视点和视线方向、视场角的变更。
10、根据权利要求1所述的计算机图象动画接收的生成方法,其特征是:
在第2阶段,把光源的移动及光源强度、光线的方向、光达到范围的变更记述为时间序列动作数据,根据上述时间序列动作数据,进行光源位置的变更及光源强度、光线的方向、光达到范围的变更。
11、根据权利要求2所述的计算机图象动画接收的生成方法,其特征是:
在第2阶段,在接续2个时间序列基本动作数据、前基本动作数据和后基本动作数据的情况下,指定接续时间,对上述前基本动作数据生成上述接续时间的向后预测曲线,对上述后基本动作数据生成接续时间的向前预测曲线,使接续开始时刻为1、接续结束时刻为0,采用单调减少而且可对时间微分的接续加权函数,求出上述向后预测曲线和上述接续加权函数的积,以及上述向前预测曲线和1减去上述接续加权函数之差的积,根据上述积之和,生成上述前基本动作数据和上述后基本动作数据的接续动作,进行时间序列基本动作数据的接续。
12、根据权利要求2所述的计算机图象动画接收的生成方法,其特征是:
在第2阶段,在接续2个时间序列基本动作数据、前基本动作数据和后基本动作数据的情况下,指定接续时间,对上述前基本动作数据生成上述接触时间的向后预测曲线,对上述后基本动作数据生成接续时间的向前预测曲线,使接续开始时刻为0、接续结束时刻为1,采用单调增加而且可对时间微分的接续加权函数,求出上述向后预测曲线和1减去上述接续加权函数之差的积,以及上述向前预测曲线和上述接续加权函数的积,根据上述积之和,生成上述前基本动作数据和上述后基本动作数据的接续动作,进行时间序列基本动作数据的接续。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP10507696 | 1996-04-25 | ||
| JP105076/96 | 1996-04-25 | ||
| JP105076/1996 | 1996-04-25 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1171580A CN1171580A (zh) | 1998-01-28 |
| CN1146805C true CN1146805C (zh) | 2004-04-21 |
Family
ID=14397855
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB97113510XA Expired - Fee Related CN1146805C (zh) | 1996-04-25 | 1997-04-24 | 通信型计算机图象动画方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6414684B1 (zh) |
| EP (1) | EP0805418B1 (zh) |
| CN (1) | CN1146805C (zh) |
| DE (1) | DE69730372T2 (zh) |
Families Citing this family (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9722343D0 (en) * | 1997-10-22 | 1997-12-17 | British Telecomm | Distributed virtual environment |
| US6243865B1 (en) * | 1998-04-01 | 2001-06-05 | Multiscience System Ptl Ltd. | Method of relaying digital video & audio data via a communication media |
| US6351267B1 (en) * | 1998-12-10 | 2002-02-26 | Gizmoz Ltd | Fast transmission of graphic objects |
| US6373489B1 (en) * | 1999-01-12 | 2002-04-16 | Schlumberger Technology Corporation | Scalable visualization for interactive geometry modeling |
| JP4215891B2 (ja) * | 1999-02-19 | 2009-01-28 | 任天堂株式会社 | オブジェクト画像プリントサービスシステム |
| US6559845B1 (en) * | 1999-06-11 | 2003-05-06 | Pulse Entertainment | Three dimensional animation system and method |
| US6996770B1 (en) * | 1999-07-26 | 2006-02-07 | Microsoft Corporation | Methods and systems for preparing extensible markup language (XML) documents and for responding to XML requests |
| US6957177B1 (en) * | 1999-12-10 | 2005-10-18 | Microsoft Corporation | Geometric model database for use in ubiquitous computing |
| US7362331B2 (en) * | 2000-01-05 | 2008-04-22 | Apple Inc. | Time-based, non-constant translation of user interface objects between states |
| US6910001B2 (en) | 2000-03-22 | 2005-06-21 | Schlumberger Technology Corp. | Distributed multiresolution geometry modeling system and method |
| JP3636681B2 (ja) * | 2000-08-24 | 2005-04-06 | 株式会社ソニー・コンピュータエンタテインメント | 画像処理方法、画像処理装置、半導体デバイス、コンピュータプログラム及び記録媒体 |
| JP4380042B2 (ja) * | 2000-09-04 | 2009-12-09 | ソニー株式会社 | アニメーション生成方法および装置 |
| JP4399133B2 (ja) * | 2000-09-08 | 2010-01-13 | カシオ計算機株式会社 | 撮影条件提供装置、撮影条件設定システム、撮影条件提供方法 |
| DE10045117C2 (de) * | 2000-09-13 | 2002-12-12 | Bernd Von Prittwitz | Verfahren und Vorrichtung zur Echtzeit-Geometriesteuerung |
| JP2002095012A (ja) * | 2000-09-18 | 2002-03-29 | Hitachi Ltd | ステレオ画像生成装置およびその方法 |
| EP1814300A1 (en) * | 2000-10-06 | 2007-08-01 | Sony Corporation | Data processing method and system |
| US20030140126A1 (en) * | 2001-03-30 | 2003-07-24 | Vitria Technology, Inc. | Method of deployment for concurrent execution of multiple versions of an integration model |
| DE10136988A1 (de) * | 2001-07-23 | 2003-02-13 | Egi Sys Ag | Verfahren zum Anzeigen von komplexen Bildern |
| US7714880B2 (en) * | 2001-11-16 | 2010-05-11 | Honeywell International Inc. | Method and apparatus for displaying images on a display |
| EP1345179A3 (en) * | 2002-03-13 | 2004-01-21 | Matsushita Electric Industrial Co., Ltd. | Method and apparatus for computer graphics animation |
| JP2004021866A (ja) * | 2002-06-19 | 2004-01-22 | Matsushita Electric Ind Co Ltd | オブジェクト形状変形装置 |
| WO2004066200A2 (en) * | 2003-01-17 | 2004-08-05 | Yeda Research And Development Co. Ltd. | Reactive animation |
| US7333111B2 (en) * | 2003-04-25 | 2008-02-19 | Honda Giken Kogyo Kabushiki Kaisha | Joint component framework for modeling complex joint behavior |
| US7173623B2 (en) * | 2003-05-09 | 2007-02-06 | Microsoft Corporation | System supporting animation of graphical display elements through animation object instances |
| US7098911B2 (en) * | 2003-07-18 | 2006-08-29 | Microsoft Corporation | Placing feathers on a surface |
| US7042456B2 (en) * | 2003-07-18 | 2006-05-09 | Microsoft Corporation | Modeling and rendering of realistic feathers |
| US20050017975A1 (en) * | 2003-07-23 | 2005-01-27 | Russo Michael John | Displaying image data |
| JP4559092B2 (ja) * | 2004-01-30 | 2010-10-06 | 株式会社エヌ・ティ・ティ・ドコモ | 携帯通信端末及びプログラム |
| US7696995B2 (en) * | 2004-05-07 | 2010-04-13 | Valve Corporation | System and method for displaying the effects of light illumination on a surface |
| WO2006050198A2 (en) * | 2004-10-28 | 2006-05-11 | Accelerated Pictures, Llc | Client/server-based animation software, systems and methods |
| US7412389B2 (en) * | 2005-03-02 | 2008-08-12 | Yang George L | Document animation system |
| US7636093B1 (en) * | 2005-07-29 | 2009-12-22 | Adobe Systems Incorporated | Parameterized motion paths |
| JP4244972B2 (ja) * | 2005-08-02 | 2009-03-25 | ソニー株式会社 | 情報処理装置,情報処理方法,およびコンピュータプログラム |
| US8026917B1 (en) * | 2006-05-01 | 2011-09-27 | Image Metrics Ltd | Development tools for animated character rigging |
| WO2008014486A2 (en) * | 2006-07-28 | 2008-01-31 | Accelerated Pictures, Inc. | Improved camera control |
| WO2008014487A2 (en) * | 2006-07-28 | 2008-01-31 | Accelerated Pictures, Inc. | Scene organization in computer-assisted filmmaking |
| US8508537B2 (en) * | 2008-11-17 | 2013-08-13 | Disney Enterprises, Inc. | System and method for dependency graph evaluation for animation |
| US9198623B2 (en) | 2010-04-22 | 2015-12-01 | Abbott Diabetes Care Inc. | Devices, systems, and methods related to analyte monitoring and management |
| CN101814190A (zh) * | 2010-04-28 | 2010-08-25 | 邹玉杰 | 一种动画制作系统和方法 |
| US8860732B2 (en) * | 2010-09-27 | 2014-10-14 | Adobe Systems Incorporated | System and method for robust physically-plausible character animation |
| US8922547B2 (en) * | 2010-12-22 | 2014-12-30 | Electronics And Telecommunications Research Institute | 3D model shape transformation method and apparatus |
| US8887074B2 (en) * | 2011-02-16 | 2014-11-11 | Apple Inc. | Rigging parameters to create effects and animation |
| CN105427365A (zh) * | 2015-11-26 | 2016-03-23 | 盛趣信息技术(上海)有限公司 | 动画实现方法、系统以及动画更新方法 |
| US10121221B2 (en) * | 2016-01-18 | 2018-11-06 | Advanced Micro Devices, Inc. | Method and apparatus to accelerate rendering of graphics images |
| US11016643B2 (en) | 2019-04-15 | 2021-05-25 | Apple Inc. | Movement of user interface object with user-specified content |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5261041A (en) * | 1990-12-28 | 1993-11-09 | Apple Computer, Inc. | Computer controlled animation system based on definitional animated objects and methods of manipulating same |
| FR2695230B1 (fr) * | 1992-08-26 | 1994-11-04 | Cuadros Isabelle | Procédé de création d'images animées. |
| US5485600A (en) * | 1992-11-09 | 1996-01-16 | Virtual Prototypes, Inc. | Computer modelling system and method for specifying the behavior of graphical operator interfaces |
| JPH0816820A (ja) * | 1994-04-25 | 1996-01-19 | Fujitsu Ltd | 3次元アニメーション作成装置 |
| US5793382A (en) * | 1996-06-10 | 1998-08-11 | Mitsubishi Electric Information Technology Center America, Inc. | Method for smooth motion in a distributed virtual reality environment |
-
1997
- 1997-04-24 US US08/842,447 patent/US6414684B1/en not_active Expired - Lifetime
- 1997-04-24 CN CNB97113510XA patent/CN1146805C/zh not_active Expired - Fee Related
- 1997-04-25 DE DE69730372T patent/DE69730372T2/de not_active Expired - Fee Related
- 1997-04-25 EP EP97106876A patent/EP0805418B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| CN1171580A (zh) | 1998-01-28 |
| EP0805418A2 (en) | 1997-11-05 |
| EP0805418A3 (en) | 1999-11-03 |
| EP0805418B1 (en) | 2004-08-25 |
| DE69730372D1 (de) | 2004-09-30 |
| US6414684B1 (en) | 2002-07-02 |
| DE69730372T2 (de) | 2005-09-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1146805C (zh) | 通信型计算机图象动画方法 | |
| CN1132123C (zh) | 计算深度信息的方法和使用深度信息进行图象处理的方法 | |
| CN1815409A (zh) | 系统、图像处理装置及信息处理方法 | |
| CN1171182C (zh) | 图象处理系统和图象处理方法 | |
| CN1161700C (zh) | 网络系统 | |
| CN1114891C (zh) | 图象处理装置、方法及设备 | |
| CN1099888A (zh) | 脸部图像数据处理装置 | |
| CN100351750C (zh) | 信息处理设备,信息处理方法,记录介质,以及程序 | |
| CN1747559A (zh) | 三维几何建模系统和方法 | |
| CN1764890A (zh) | 用于对象的行为翻译器 | |
| CN1095105C (zh) | 控制可移动装置的设备与方法 | |
| CN1272933A (zh) | 图像处理装置与图像处理方法、程序提供媒体、以及数据提供媒体 | |
| CN1742482A (zh) | 合成图像输出设备以及合成图像传送设备 | |
| CN101055646A (zh) | 用于处理图像的方法、装置和计算机程序 | |
| CN1707431A (zh) | 信号处理装置及其方法 | |
| CN1172239C (zh) | 执行移动对象的方法 | |
| CN1518699A (zh) | 信息图像利用系统、信息图像管理装置、信息图像管理方法、用户信息图像、程序、和记录介质 | |
| CN101040249A (zh) | 虚拟桌面—元-组织和控制系统 | |
| CN1655700A (zh) | 利用计算机网络进行浏览、储存和传输服装模型的方法和设备 | |
| CN1867940A (zh) | 成像装置及其图像处理方法 | |
| CN1383532A (zh) | 图像指定文件的制作和使用了该文件的图像的播放 | |
| CN1384455A (zh) | 信息处理装置和方法 | |
| CN1121199A (zh) | 字符发生装置及其实现方法 | |
| CN1645415A (zh) | 绘制装置和绘制方法 | |
| CN1116744A (zh) | 通过对任意部位图象的组合生成目标图象的装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20040421 Termination date: 20100424 |