CN112211992A - 调节机构、驱动装置以及机器设备 - Google Patents
调节机构、驱动装置以及机器设备 Download PDFInfo
- Publication number
- CN112211992A CN112211992A CN202011025948.4A CN202011025948A CN112211992A CN 112211992 A CN112211992 A CN 112211992A CN 202011025948 A CN202011025948 A CN 202011025948A CN 112211992 A CN112211992 A CN 112211992A
- Authority
- CN
- China
- Prior art keywords
- output shaft
- elastic
- adjustment mechanism
- abutting part
- outer contour
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H57/021—Shaft support structures, e.g. partition walls, bearing eyes, casing walls or covers with bearings
- F16H57/022—Adjustment of gear shafts or bearings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H57/021—Shaft support structures, e.g. partition walls, bearing eyes, casing walls or covers with bearings
- F16H57/022—Adjustment of gear shafts or bearings
- F16H2057/0222—Lateral adjustment
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Retarders (AREA)
Abstract
本发明公开一种调节机构及应用其的机器设备,该调节机构包括输出轴以及固定壳体,输出轴用于与旋转驱动件的输出端连接,输出轴上套设有凸轮件,凸轮件包括绕输出轴的外轮廓面,外轮廓面在周向上至少包括有第一区域和第二区域,其中,至少第一区域与所述输出轴的距离大于第二区域与输出轴的距离;固定壳体包括有弹性抵接件,弹性抵接件用于与外轮廓面抵接,其中,弹性抵接件与第一区域抵接时,弹性抵接件在凸轮件的压力下进行弹性蓄能,当弹性抵接件与第二区域抵接时,弹性抵接件释放弹性蓄能以给输出轴提供扭矩补偿。通过上述方式,本发明可以给旋转驱动件的输出扭矩进行调节与补偿,以使得旋转驱动件在较好工作区间内工作。
Description
技术领域
本发明涉及电机领域,特别涉及一种调节机构、驱动装置以及机器设备。
背景技术
对于驱动组件而言一般包括有一个较佳工作区间,在该工作区间内驱动组件的性能可以达到较优效果。然而在实际场景中,由于环境的重力或者来自驱动对象的阻力的问题,驱动组件一般无法一直在较佳工作区间进行工作。
发明内容
本发明提供一种调节机构、驱动装置以及机器设备,以解决现有技术中在无法一直在较佳工作区域内工作的问题。
为解决上述技术问题,本发明采用的一个技术方案是:提供一种调节机构,所述调节机构包括:输出轴,用于与旋转驱动件的输出端连接,所述输出轴上套设有凸轮件,所述凸轮件包括绕所述输出轴的外轮廓面,所述外轮廓面在周向上至少包括有第一区域和第二区域,其中,至少第一区域与所述输出轴的距离大于第二区域与所述输出轴的距离;固定壳体,包括有弹性抵接件,所述弹性抵接件用于与所述外轮廓面抵接,其中,所述弹性抵接件与所述第一区域抵接时,所述弹性抵接件在所述凸轮件的压力下进行弹性蓄能,当所述弹性抵接件与所述第二区域抵接时,所述弹性抵接件释放所述弹性蓄能以给所述输出轴提供扭矩补偿。
根据本发明提供的一实施方式,所述弹性抵接件沿垂直于所述输出轴的轴线的方向抵接于所述外轮廓面上。
根据本发明提供的一实施方式,所述凸轮件包括沿所述外轮廓面的周向设置的环形槽,所述外轮廓面包括所述环形槽的槽底面,所述弹性抵接件抵接于所述槽底面上。
根据本发明提供的一实施方式,所述凸轮件包括沿所述外轮廓面的周向设置的滑轨,所述弹性抵接件的端部设置有滑块以与所述滑轨配合以使得所述弹性抵接件滑动性设置于所述滑轨上。
根据本发明提供的一实施方式,所述外轮廓面沿周向上与输出轴的角度-距离曲线为预设曲线。
根据本发明提供的一实施方式,所述弹性抵接件包括弹性件和设置于所述弹性件靠近所述凸轮件的第一端的且与所述外轮廓面抵接的抵接件。
根据本发明提供的一实施方式,所述固定壳体上包括有容纳通道,所述弹性件位于所述容纳通道内,所述抵接件的至少部分位于所述容纳通道内。
根据本发明提供的一实施方式,所述弹性抵接件还包括调节件,所述调节件设置于所述弹性件远离所述凸轮件的第二端,用于调节所述第二端与所述输出轴的距离。
根据本发明提供的一实施方式,所述容纳通道为贯穿孔,且在远离所述凸轮件的一端设置有内螺纹,所述调节件设置有外螺纹,所述调节件通过螺纹配合固定于所述固定壳体上,且通过螺纹旋转以调节所述第二端与所述输出轴的距离。
根据本发明提供的一实施方式,所述固定壳体套设于所述输出轴上且与所述输出轴相对转动设置,所述调节机构还包括轴承,所述轴承的内圈与所述输出轴固定,所述轴承的外圈与所述固定壳体固定。
为解决上述技术问题,本发明采用的一个技术方案是:提供一种驱动装置,所述驱动装置包括旋转驱动件与上述任一实施例中的调节机构,所述调节机构包括:输出轴,与所述旋转驱动件的输出端连接,所述输出轴上套设有凸轮件,所述凸轮件包括绕所述输出轴的外轮廓面,所述外轮廓面在周向上至少包括有第一区域和第二区域,其中,至少第一区域与所述输出轴的距离大于第二区域与所述输出轴的距离;固定壳体,包括有弹性抵接件,所述弹性抵接件用于与所述外轮廓面抵接,其中,所述弹性抵接件与所述第一区域抵接时,所述弹性抵接件在所述凸轮件的压力下进行弹性蓄能,当所述弹性抵接件与所述第二区域抵接时,所述弹性抵接件释放所述弹性蓄能以给所述输出轴提供扭矩补偿。
根据本发明提供的一实施方式,所述驱动装置还包括连接所述输出轴与所述旋转驱动件的输出端的减速组件,所述减速组件包括太阳齿轮、多个行星齿轮以及内齿轮;所述太阳齿轮与所述旋转驱动件的输出端连接,所述多个行星齿轮绕所述太阳齿轮设置且均与所述太阳齿轮齿合,所述内齿轮则环绕所述多个行星齿轮且与所述多个行星齿轮齿合;其中,所述输出轴与所述多个行星齿轮固定,所述固定壳体与所述内齿轮固定。
根据本发明提供的一实施方式,所述固定壳体套设于所述输出轴上且与所述旋转驱动件的座体固定设置。
为解决上述技术问题,本发明采用的一个技术方案是:提供一种机器设备,其特征在于,所述机器设备包括上述中任一项所述的驱动装置。
有益效果:区别于现有技术,本发明通过在输出轴上设置凸轮件,且凸轮件的外轮廓面包括第一区域和第二区域,且进一步通过设置包括弹性抵接件的固定壳体,弹性抵接件与第一区域抵接时,弹性抵接件在凸轮件的压力下进行弹性蓄能,当弹性抵接件与第二区域抵接时,弹性抵接件释放弹性蓄能以给输出轴提供扭矩补偿。即通过对输出轴的补偿和调整,可以有效的保持整个旋转驱动件在一个较佳的工作区间内进行工作。
附图说明
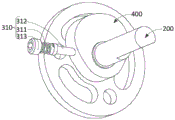
图1是本发明提供的调节机构第一实施例的结构示意图;
图2是图1所示调节机构的正视示意图;
图3是图2所示调节机构沿A-A的剖面示意图;
图4是图1所示调节机构的部分分解示意图;
图5是图1所示调节机构中固定外壳的结构示意图;
图6是图5所示固定外壳与凸轮件的配合示意图;
图7是图1所示调节机构中凸轮件的结构示意图;
图8是图1所示调节机构中输出轴、凸轮件以及弹性抵接件的配合示意图;
图9是本申请提供的驱动装置中减速组件与旋转驱动件的配合示意图;
图10是本申请提供的驱动装置中旋转驱动件、减速组件以及输出轴的配合示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
请参阅图1-图10,本发明提供一种调节机构10,该调节机构10包括有输出轴200以及固定壳体300。可选的,调节机构10具体可以用于配合旋转驱动件100从而调节输出扭矩和功率。
如图1所示,输出轴200具体可以与旋转驱动件100的输出端连接,该输出轴200上凸轮件400,该凸轮件400包括绕输出轴200的外轮廓面410,外轮廓面410在周向上包括有多个区域,其中,至少有两个区域与输出轴的距离不同。
其中,旋转驱动件100具体可以是旋转电机,如转子电机等等,这里不做限定。
如图7所示,外轮廓面410沿着周向上可以包括第一区域和第二区域,其中,第一区域与输出轴200的距离大于第二区域与输出轴200的距离。
如图2和图3所示,固定壳体300包括有弹性抵接件310,该弹性抵接件310用于与外轮廓面410抵接,其中,当弹性抵接件310与第一区域抵接时,弹性抵接件310在凸轮件400的压力下进行弹性蓄能,当弹性抵接件310与第二区域抵接时,弹性抵接件310释放弹性蓄能以给输出轴200供扭矩补偿。
在具体场景中,由于外轮廓面410在周向上与输出轴200的距离所有不同,因此当旋转驱动件100带动输出轴200并进而带动凸轮件400旋转时,外轮廓面410与弹性抵接件310的抵接程度所有区别,可选的,由于第一区域与输出轴200较远,则该第一区域对弹性抵接件310的抵接程度较强,即可以对弹性抵接件310施加相应的压力,从而使得弹性抵接件310开始进行弹性蓄能,由于第二区域与输出轴200较近,则第二区域对弹性抵接件310的抵接程度较弱,则弹性抵接件310可以释放相应的弹性蓄能以给输出轴200提供扭矩补偿。
可选的,在第一区域对弹性抵接件310进行弹性蓄能时,输出轴200会减弱一定的扭矩,而在第二区域时,弹性抵接件310则可以对输出轴200进行扭矩的补偿,从而可以克服由于环境带来的影响,从而使得在整个调节机构10一直保持较佳工作区域。
例如,在具体场景中,调节机构10可以应用于机器设备上,,该机器设备具体可以是外骨骼机器人,以给关节提供动力。由于重力和关节弯曲程度的影响,如在用户穿戴外骨骼机器人时例如行走时,在行走过程中由于关节的弯曲程度不同,则穿戴外骨骼机器需要提供的助力也不同,即调节机构10所需要输出的目标功率有所不同。在所需的目标功率较低的情况下,旋转驱动件100所输出的功率相对目标功率较大,即有部分溢出,因此可以通过凸轮件400将多余的能量给弹性抵接件310进行弹性蓄能。在所需目标功率较高的情况下,旋转驱动件100所输出的功率相对目标功率较低,即需要补偿功率,因此弹性抵接件310可以释放弹性蓄能并通过凸轮件400提供给输出轴200。
在另一场景中,如用户穿戴外骨骼机器人搬动重物时,在放置重物时候,在重力的作用下可以带动输出轴200转动并进而给弹性抵接件310进行弹性蓄能,在搬动重物时,弹性抵接件310可以释放弹性蓄能并补偿输出轴200的扭矩。
在具体实施例中,外轮廓面410沿周向上与输出轴200的角度-距离曲线具体可以为预设曲线。该预设曲线可以为直角坐标系,角度为X轴,距离为Y轴。即在可选实施例中,外轮廓面410划分为360度,可以预设一个基准角度作为0度(360°),并以旋转方向为正方向,在每个角度均对应相应的距离。这个预设曲线具体是根据该调节机构10的输出功率信息以及所需应用场景的所需输出功率信息而生成的。
上述实施例中,通过在输出轴200上设置凸轮件400,且凸轮件400的外轮廓面410包括第一区域和第二区域,且进一步通过设置包括弹性抵接件310的固定壳体300,弹性抵接件310与第一区域抵接时,弹性抵接件310在凸轮件400的压力下进行弹性蓄能,当弹性抵接件310与第二区域抵接时,弹性抵接件310释放弹性蓄能以给输出轴200提供扭矩补偿。即通过对输出轴200的补偿和调整,可以有效的保持整个调节机构10在一个较佳的工作区间内进行工作。
在可选实施例中,外轮廓面410在周向上是一个连续的曲面。且外轮廓面410沿周向上具体可以包括多个区域,多个区域包括有第一区域和第二区域,在可选实施例中,不同区域离输出轴的距离不同。即凸轮件400为一个不规则的环状体结构。
在可选实施例中,多个区域中也可以存在与输出轴200的距离较短的区域,使得弹性抵接件310无法与该区域直接接触。
在一可选场景中,多个区域是具有较长周向长度的区域,且相邻的每个区域离输出轴200的距离均不同。可选的,每个区域之间离输出轴200的距离均不同。
在另一可选场景中,多个区域是也可以具有较短周向长度的区域,即每个区域可以为一条平行于输出轴200的轴线的线,且沿周向上,多个区域与输出轴200的距离为渐变的。
在可选实施例中,该弹性抵接件310可以沿垂直于输出轴200的轴线的方向抵接于外轮廓面410上。从而可以达到最佳的蓄能或者释放蓄能的效果。需要知道的是,这里的垂直是可以满足一定角度误差内的,如工艺上不可避免的角度。
在可选实施例中,弹性抵接件310与外轮廓面410相互抵接的平面是平行的。
在可选实施例中,外轮廓面410与输出轴200的轴线平行。
在另一可选实施例中,该弹性抵接件310也可以与输出轴200的轴线呈现45°-90°的角度抵接于外轮廓面410上,这里不做限定。
在可选实施例中,弹性抵接件310可以为多个,这里不做限定。
在可选实施例中,凸轮件400包括沿外轮廓面410的周向设置的环形槽(图未示),外轮廓面410还进一步包括环形槽的槽底面,弹性抵接件310则抵接于槽底面上。即凸轮件400还可以包括有一个环形槽,该弹性抵接件310与凸轮件400的抵接部分可以位于该环形槽内,且该环形槽在沿输出轴200的轴线方向长度大于弹性抵接件310输出轴200的轴线方向长度一定的预设长度,从而可以限制弹性抵接件310沿输出轴200的轴线方向的位移,以提高整个结构的稳定性。
在可选实施例中,凸轮件400还可以包括沿外轮廓面410的周向设置的滑轨(图未示),弹性抵接件310的端部设置有滑块以与滑轨配合以使得弹性抵接件310滑动性设置于滑轨上,进而与外轮廓面410相抵接。
可选的,该滑轨可以设置于环形槽内,这里不做限定。
如图3和图8所示,弹性抵接件310包括弹性件311和抵接件312,该抵接件312具体可以设置于弹性件311靠近凸轮件400的第一端的且与外轮廓面410抵接。可选的,抵接件312与弹性件311的第一端可以是简单的抵接关系,没有进行固定连接。
在可选实施例中,弹性件311具体可以为压簧,抵接件312具体可以为顶针等。
如图3和图4所示,固定壳体300上还可以包括有容纳通道320,弹性件311则位于容纳通道320内,抵接件312的至少部分位于容纳通道320内。
即可选的,抵接件312可以沿着容纳通道320的长度方向移动,在输出轴200带动凸轮件400旋转时,当第一区域抵接抵接件312时,凸轮件400给抵接件312提供压力以使得抵接件312朝向弹性件311运动,以使得弹性件311压缩并开始弹性蓄能。随后在当二区域抵接抵接件312时,此时弹性件311会释放弹性蓄能并进而使得抵接件312给凸轮件400提供一定的补偿扭矩。且通过设置容纳通道420,以保证整个弹性件311和抵接件312的稳固性。
如图3所示,弹性抵接件310还包括调节件313,调节件313设置于弹性件311远离凸轮件400的第二端,用于调节第二端与输出轴200的距离。
上述实施例中,通过设置调节件313,用于调节弹性件311的第二端与输出轴200的距离,从而可以调节弹性件311的弹性力,即调节整个弹性抵接件310的蓄能程度,从而改变对输出轴200的扭矩调节量和补偿量。
具体的,容纳通道320具体可以为贯穿孔,且在远离凸轮件400的一端设置有内螺纹,调节件313设置有外螺纹,调节件313可以通过外螺纹与容纳通道320的内螺纹的螺纹配合,从而固定于固定壳体300上,且可以通过调节件313进行螺纹旋转从而调节第二端与所述输出轴200的距离。
可选的,通过在调节件313设置外螺纹与容纳通道320的内螺纹的螺纹配合,一方面无需对整个调节机构10进行拆分则可以直接通过扭动调节件313从而对改变对输出轴200的扭矩调节量和补偿量。另一方面,由于弹性件311与抵接件312没有连接关系,则可以通过松动调节件313以解除与固定壳体300的固定,从而快速且便捷将弹性件311进行替换,不仅仅可以替换使用较久导致弹性疲劳的弹性件311,还可以根据需求替换不同规格的弹性件311。
如图2和图3所示,固定壳体300套设于输出轴200上且与输出轴200相对转动设置,可选的,调节机构10还包括轴承500,轴承500的内圈510与输出轴200固定,轴承500的外圈520与固定壳体300固定。
在具体场景中,本申请的调节机构10可以是模块化结构,可以包括多种规格从而与不同旋转驱动件100进行适配,如旋转驱动件100是市面上的HT3510电机,可以针对该电机提供相关对应规格的调节机构10与其适配,从而实现对该HT3510电机的输出扭矩与功率进行调节。类似的,可以针对不同的旋转驱动件100提供不同的调节机构10的适配方案,以保证调节机构10可以与旋转驱动件100相配合。从而可以实现灵活化组装,如同一旋转驱动件100搭配不同规格的调节机构10所输出的功率和扭矩有所不同,从而极大化的提供灵活度。
本申请还提供一种驱动装置,该驱动装置包括上述任一实施例中的旋转驱动件100和调节机构10。
输出轴200具体可以与旋转驱动件100的输出端连接,该输出轴200上凸轮件400,该凸轮件400包括绕输出轴200的外轮廓面410,外轮廓面410在周向上包括有多个区域,其中,至少有两个区域与输出轴的距离不同。
如图7所示,外轮廓面410沿着周向上可以包括第一区域和第二区域,其中,第一区域与输出轴200的距离大于第二区域与输出轴200的距离。
如图2和图3所示,固定壳体300包括有弹性抵接件310,该弹性抵接件310用于与外轮廓面410抵接,其中,当弹性抵接件310与第一区域抵接时,弹性抵接件310在凸轮件400的压力下进行弹性蓄能,当弹性抵接件310与第二区域抵接时,弹性抵接件310释放弹性蓄能以给输出轴200供扭矩补偿。
如图9和图10所示,驱动装置还包括连接输出轴200与旋转驱动件100的输出端的减速组件600,该减速组件600包括太阳齿轮610、多个行星齿轮620以及内齿轮630;太阳齿轮610与旋转驱动件100的输出端连接,多个行星齿轮620绕太阳齿轮610设置且均与太阳齿轮610齿合,内齿轮630则环绕多个行星齿轮620且与多个行星齿轮620齿合。且进一步的,输出轴200与多个行星齿轮620固定,固定壳体300与内齿轮630固定。
可选的,行星齿轮620具体可以为3个,通过设置减速组件600,可以有效的调整输出轴200相对旋转驱动件100的输出端的转速,并增大输出轴200的输出扭矩。
在可选实施例中,固定壳体300套设于输出轴200上且与旋转驱动件100的座体固定设置。
在可选实施例中,固定壳体300套设于输出轴200上且与旋转驱动件100的相对转动设置。
本发明还提供一种机器设备,该机器设备包括上述任一实施例中的调节机构10。
可选的,机器设备具体可以是外骨骼机器人,四足机器人或者其他会受重力场等环境因素影响机器设备,这里不做限定。
在其他实施例中,机器设备还可以是假肢,如下肢假肢或者上肢假肢等需要进行行走或辅助行走等需要周期性运动的机器设备等。
综上所述,本发明提供的调节机构、驱动装置以及机器设备,通过在输出轴200上设置凸轮件400,且凸轮件400的外轮廓面410包括第一区域和第二区域,且进一步通过设置包括弹性抵接件310的固定壳体300,弹性抵接件310与第一区域抵接时,弹性抵接件310在凸轮件400的压力下进行弹性蓄能,当弹性抵接件310与第二区域抵接时,弹性抵接件310释放弹性蓄能以给输出轴200提供扭矩补偿。即通过对输出轴200的补偿和调整,可以有效的保持整个驱动装置在一个较佳的工作区间内进行工作。且整个结构紧凑且简单,且可以对弹性抵接件310进行便捷的调节与替换等,可以基于具体的应用场景进行快速改变对输出轴200的调节量和补偿量。
以上仅为本发明的实施方式,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结果或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
Claims (14)
1.一种调节机构,其特征在于,所述调节机构包括:
输出轴,用于与旋转驱动件的输出端连接,所述输出轴上套设有凸轮件,所述凸轮件包括绕所述输出轴的外轮廓面,所述外轮廓面在周向上至少包括有第一区域和第二区域,其中,至少第一区域与所述输出轴的距离大于第二区域与所述输出轴的距离;
固定壳体,包括有弹性抵接件,所述弹性抵接件用于与所述外轮廓面抵接,其中,所述弹性抵接件与所述第一区域抵接时,所述弹性抵接件在所述凸轮件的压力下进行弹性蓄能,当所述弹性抵接件与所述第二区域抵接时,所述弹性抵接件释放所述弹性蓄能以给所述输出轴提供扭矩补偿。
2.根据权利要求1所述的调节机构,其特征在于,所述弹性抵接件沿垂直于所述输出轴的轴线的方向抵接于所述外轮廓面上。
3.根据权利要求1所述的调节机构,其特征在于,所述凸轮件包括沿所述外轮廓面的周向设置的环形槽,所述外轮廓面包括所述环形槽的槽底面,所述弹性抵接件抵接于所述槽底面上。
4.根据权利要求1所述的调节机构,其特征在于,所述凸轮件包括沿所述外轮廓面的周向设置的滑轨,所述弹性抵接件的端部设置有滑块以与所述滑轨配合以使得所述弹性抵接件滑动性设置于所述滑轨上。
5.根据权利要求1所述的调节机构,其特征在于,所述外轮廓面沿周向上与输出轴的角度-距离曲线为预设曲线。
6.根据权利要求1所述的调节机构,其特征在于,所述弹性抵接件包括弹性件和设置于所述弹性件靠近所述凸轮件的第一端的且与所述外轮廓面抵接的抵接件。
7.根据权利要求6所述的调节机构,其特征在于,所述固定壳体上包括有容纳通道,所述弹性件位于所述容纳通道内,所述抵接件的至少部分位于所述容纳通道内。
8.根据权利要求7所述的调节机构,其特征在于,所述弹性抵接件还包括调节件,所述调节件设置于所述弹性件远离所述凸轮件的第二端,用于调节所述第二端与所述输出轴的距离。
9.根据权利要求8所述的调节机构,其特征在于,所述容纳通道为贯穿孔,且在远离所述凸轮件的一端设置有内螺纹,所述调节件设置有外螺纹,所述调节件通过螺纹配合固定于所述固定壳体上,且通过螺纹旋转以调节所述第二端与所述输出轴的距离。
10.根据权利要求1所述的调节机构,其特征在于,所述固定壳体套设于所述输出轴上且与所述输出轴相对转动设置,所述调节机构还包括轴承,所述轴承的内圈与所述输出轴固定,所述轴承的外圈与所述固定壳体固定。
11.一种驱动装置,其特征在于,所述驱动装置包括旋转驱动件与上述任一实施例中的调节机构,所述调节机构包括:
输出轴,与所述旋转驱动件的输出端连接,所述输出轴上套设有凸轮件,所述凸轮件包括绕所述输出轴的外轮廓面,所述外轮廓面在周向上至少包括有第一区域和第二区域,其中,至少第一区域与所述输出轴的距离大于第二区域与所述输出轴的距离;
固定壳体,包括有弹性抵接件,所述弹性抵接件用于与所述外轮廓面抵接,其中,所述弹性抵接件与所述第一区域抵接时,所述弹性抵接件在所述凸轮件的压力下进行弹性蓄能,当所述弹性抵接件与所述第二区域抵接时,所述弹性抵接件释放所述弹性蓄能以给所述输出轴提供扭矩补偿。
12.根据权利要求11所述的驱动装置,其特征在于,所述驱动装置还包括连接所述输出轴与所述旋转驱动件的输出端的减速组件,所述减速组件包括太阳齿轮、多个行星齿轮以及内齿轮;
所述太阳齿轮与所述旋转驱动件的输出端连接,所述多个行星齿轮绕所述太阳齿轮设置且均与所述太阳齿轮齿合,所述内齿轮则环绕所述多个行星齿轮且与所述多个行星齿轮齿合;
其中,所述输出轴与所述多个行星齿轮固定,所述固定壳体与所述内齿轮固定。
13.根据权利要求1所述的驱动装置,其特征在于,所述固定壳体套设于所述输出轴上且与所述旋转驱动件的座体固定设置。
14.一种机器设备,其特征在于,所述机器设备包括权利要求10-12中任一项所述的调节机构。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011025948.4A CN112211992A (zh) | 2020-09-25 | 2020-09-25 | 调节机构、驱动装置以及机器设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011025948.4A CN112211992A (zh) | 2020-09-25 | 2020-09-25 | 调节机构、驱动装置以及机器设备 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112211992A true CN112211992A (zh) | 2021-01-12 |
Family
ID=74051156
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011025948.4A Pending CN112211992A (zh) | 2020-09-25 | 2020-09-25 | 调节机构、驱动装置以及机器设备 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112211992A (zh) |
-
2020
- 2020-09-25 CN CN202011025948.4A patent/CN112211992A/zh active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109073047B (zh) | 带有齿隙自动调节的摆线减速器和具有这种减速器的动力转向系统 | |
| US9321172B2 (en) | Modular rotational electric actuator | |
| EP0719959A1 (en) | Speed reducer | |
| CN107053245B (zh) | 一种旋转型变刚度柔性关节 | |
| CN110744584A (zh) | 一种柔性主-被动变刚度关节 | |
| CN101371062A (zh) | 弗雷摩擦齿轮 | |
| JP2022500612A (ja) | 2つのフレクスプラインを備える変形量制限可能式波動減速機 | |
| US11378170B2 (en) | Gear device and robot | |
| CN207328569U (zh) | 蜗轮蜗杆配合间隙调节机构、助力转向器及其系统和车辆 | |
| CN111571566A (zh) | 用于辅助肌肉力量的可穿戴设备 | |
| CN214743199U (zh) | 调节机构、驱动装置以及机器设备 | |
| CN112211992A (zh) | 调节机构、驱动装置以及机器设备 | |
| CN113246179A (zh) | 用于重载下肢助力外骨骼的无源重力补偿髋关节及机器人 | |
| CN110076812B (zh) | 一种欠驱动灵巧手手指 | |
| CN110202614A (zh) | 防护装置和工业机器人 | |
| CN214924594U (zh) | 一种用于重载下肢助力外骨骼的无源重力补偿髋关节 | |
| CN112643710B (zh) | 可变力矩输出装置和机器人 | |
| CN210920040U (zh) | 一种摆线钢球减速器轴向锁紧装置 | |
| CN210715759U (zh) | 蜗轮蜗杆传动机构 | |
| JP2014214799A (ja) | 遊星歯車機構および遊星歯車機構の組み立て方法 | |
| CN203980157U (zh) | 激光设备和调节组件 | |
| CN112648345A (zh) | 可变力矩输出装置和机器人 | |
| CN215810466U (zh) | 一种枪瞄调节器及具有该枪瞄调节器的枪瞄设备 | |
| CN111271435B (zh) | 具有防偏心功能的搅拌设备用减速机壳体 | |
| CN111360844B (zh) | 刚度主动控制的末段肢杆及包含该末段肢杆的仿生机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |