CN112171651A - 一种6轴大负载工业机器人手腕结构 - Google Patents
一种6轴大负载工业机器人手腕结构 Download PDFInfo
- Publication number
- CN112171651A CN112171651A CN202011057609.4A CN202011057609A CN112171651A CN 112171651 A CN112171651 A CN 112171651A CN 202011057609 A CN202011057609 A CN 202011057609A CN 112171651 A CN112171651 A CN 112171651A
- Authority
- CN
- China
- Prior art keywords
- bevel gear
- reducer
- axis
- speed reducer
- input bevel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/08—Programme-controlled manipulators characterised by modular constructions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/102—Gears specially adapted therefor, e.g. reduction gears
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Gear Transmission (AREA)
Abstract
本发明公开了一种6轴大负载工业机器人手腕结构,包括J5轴输入锥齿轮、J5减速机组件、J6减速机组件、J6轴输入锥齿轮和J6轴传动过渡组件;其中:J5减速机组件的J5减速机输入锥齿轮与J5轴输入锥齿轮齿合连接,J5轴输入锥齿轮传动连接J5电机;J6减速机组件的J6减速机输入锥齿轮通过J6轴传动过渡组件与J6轴输入锥齿轮齿合连接,J6轴输入锥齿轮传动连接J6电机。且J5减速机组件及J6减速机组件中采用双列角接触球轴承固定安装在对应转接法兰上。本发明的6轴大负载工业机器人手腕结构,只需外接一根输出轴,降低了对5、6轴减速机的选定要求和过多的定制要求,且有效的承担了锥齿轮专递过程中的轴向载荷,避免了轴向力对减速机带来的不利影响。
Description
技术领域
本发明涉及机器人技术领域,尤其涉及一种6轴大负载工业机器人手腕结构。
背景技术
现有6轴工业机器人5、6轴即手腕传动部分大多分为电机前置和电机后置两种结构形式。电机前置的结构形式即为5、6轴电机安装在手腕附近,通过电机与减速机直连或者电机、同步带、减速机等传动形式进行传动;电机后置的形式即为5、6轴电机置于三轴附近,通过一系列的传动链将动力输送到手腕,再分别与5、6轴减速机进行连接,实现手腕5、6轴的驱动。由于电机本身具有一定的重量,电机前置的方案会造成手腕重量增加,增大其它关节传动所需的负载大小,影响机器人整机性能。此外,随着机器人负载的增大,其各轴所需的电机功率也需增大,即电机重量和大小也会对应的增大。因此,在大负载工业机器人中手腕适宜采用采用电机后置的方式。
现有大负载工业机器人一般采用电机后置的方式进行传动。由于电机后置,5、6轴的传动一般都需要利用齿轮、花键、锥齿轮等结构形式进行动力的传递,在与减速机进行传动的位置通常采用锥齿轮传动。标准减速机的输入轴通常采用直齿轮进行输入,电机后置的结构中,由于锥齿轮的采用,通常需要与减速机厂家进行对接,对标准减速机的设计进行相应的修改,将标准减速机更改为可与锥齿轮进行连接的结构形式。
发明内容
本发明所要解决的技术问题是:针对现有技术中存在的上述缺陷,提出一种6轴大负载工业机器人手腕结构。
为实现上述目的,本发明采用以下技术方案:
本发明提供一种6轴大负载工业机器人手腕结构,包括J5轴输入锥齿轮、J5减速机组件、J6减速机组件、J6轴输入锥齿轮和J6轴传动过渡组件;其中:
所述J5减速机组件的J5减速机输入锥齿轮与所述J5轴输入锥齿轮齿合连接,所述J5轴输入锥齿轮传动连接J5电机;
所述J6减速机组件的J6减速机输入锥齿轮通过所述J6轴传动过渡组件与所述J6轴输入锥齿轮齿合连接,所述J6轴输入锥齿轮传动连接J6电机。
进一步地,在所述的6轴大负载工业机器人手腕结构上,所述J5减速机组件包括J5减速机输入锥齿轮、J5双列角接触球轴承、J5双列角接触球轴承压盖、J5减速机转接法兰和J5减速机本体,其中:
所述J5减速机输入锥齿轮通过J5平键与所述J5减速机本体的输入轴连接,并与所述J5双列角接触球轴承的内圈相配合,配合后通过所述第一J5螺钉、J5双列角接触球轴承内圈压盖进行固定;
所述J5双列角接触球轴承的外圈安装于所述J5减速机转接法兰内,并通过J5双列角接触球轴承压盖和第二J5螺钉对其外圈进行固定。
进一步地,在所述的6轴大负载工业机器人手腕结构上,所述J5减速机转接法兰通过位于内圈的第三J5螺钉和位于外圈的第四J5螺钉与所述J5减速机本体连接。
进一步优选地,在所述的6轴大负载工业机器人手腕结构上,所述J5减速机组件还包括J5减速机盖板,其中:
所述J5减速机盖板密封装配于所述J5减速机本体的背面。
进一步地,在所述的6轴大负载工业机器人手腕结构上,所述J6减速机组件包括J6减速机输入锥齿轮、J6双列角接触球轴承、J6双列角接触球轴承压盖、J6减速机转接法兰以及J6减速机本体,其中:
所述J6减速机输入锥齿轮通过J6平键与所述J6减速机本体的输入轴连接,并与所述J6双列角接触球轴承的内圈相配合,配合后通过第一J6螺钉和卡簧进行轴向固定;
所述J6双列角接触球轴承的外圈安装于所述J6减速机转接法兰内,并通过所述J6双列角接触球轴承压盖和第二J6螺钉对其外圈进行固定。
进一步优选地,在所述的6轴大负载工业机器人手腕结构上,所述J6减速机转接法兰通过第三J6螺钉和第四J6螺钉与所述J6减速机本体连接。
进一步优选地,在所述的6轴大负载工业机器人手腕结构上,所述J6减速机组件还包括J6减速机输出法兰,其中:
所述J6减速机输出法兰密封装配于所述J6减速机本体的背面。
进一步地,在所述的6轴大负载工业机器人手腕结构上,所述J5轴输入锥齿轮通过双列圆锥滚子轴承装配于J5箱体内。
进一步地,在所述的6轴大负载工业机器人手腕结构上,所述J6轴输入锥齿轮通过轴承装配于所述J5轴输入锥齿轮内。
进一步地,在所述的6轴大负载工业机器人手腕结构上,所述J6轴传动过渡组件包括J6轴主动直齿轮传动组件、J6轴从动直齿轮传动组件,其中:
所述J6轴主动直齿轮传动组件的输入端为锥齿轮,与所述J6轴输入锥齿轮齿合连接;以及
所述J6轴从动直齿轮传动组件的输出端亦为锥齿轮,与所述J6减速机输入锥齿轮齿合连接;和
所述J6轴主动直齿轮传动组件输出端和所述J6轴从动直齿轮传动组件的输出端亦为直齿轮,两直齿轮之间通过直齿轮啮合进行连接。
本发明采用上述技术方案,与现有技术相比,具有如下技术效果:
(1)该工业机器人手腕结构,降低了对5、6轴减速机选定的要求,采用此手腕结构后,5、6轴减速机只需外接一根输出轴,避免了过多定制的要求。
(2)J5减速机组件以及J6减速机组件中使用的双列角接触球轴承固定安装在所对应的转接法兰上,有效的承担了锥齿轮专递过程中的轴向载荷,避免了轴向力对减速机带来的不利影响;
(3)该工业机器人手腕结构中,J5减速机组件以及J6减速机组件以组件的形式进行安装,简化了设计流程,降低了安装难度,提高了生产效率。
附图说明
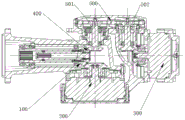
图1为本发明一种6轴大负载工业机器人手腕结构的整体剖视结构示意图;
图2为本发明一种6轴大负载工业机器人手腕结构中J5减速机组件的剖视结构示意图;
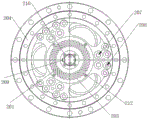
图3为本发明一种6轴大负载工业机器人手腕结构中J5减速机组件的俯视结构示意图;
图4为本发明一种6轴大负载工业机器人手腕结构中J6减速机组件的剖视结构示意图;
图5为本发明一种6轴大负载工业机器人手腕结构中J6减速机组件的俯视结构示意图;
其中,各附图标记为:
100-J5轴输入锥齿轮;
200-J5减速机组件,201-J5减速机输入锥齿轮,202-J5双列角接触球轴承,203-J5双列角接触球轴承压盖,204-J5减速机转接法兰,205-J5减速机本体,206-J5减速机盖板,207-第三J5螺钉,208-第四J5螺钉,209-J5平键,210-第一J5螺钉,211-J5双列角接触球轴承内圈压盖,212-第二J5螺钉;
300-J6减速机组件,301-J6减速机输入锥齿轮,302-J6双列角接触球轴承,303-J6双列角接触球轴承压盖,304-J6减速机转接法兰,305-J6减速机本体,306-J6减速机输出法兰,307-第三J6螺钉,308-第四J6螺钉,309-J6平键,310-卡簧,311-第二J6螺钉,312-第一J6螺钉;
400-J6轴输入锥齿轮;
500-J6轴传动过渡组件,501-J6轴主动直齿轮传动组件,502-J6轴从动直齿轮传动组件。
具体实施方式
下面通过具体实施例对本发明进行详细和具体的介绍,以使更好的理解本发明,但是下述实施例并不限制本发明范围。
在一些实施例中,如图1所示,提供一种6轴大负载工业机器人手腕结构,尤其是提供一种负载150公斤的6轴机器人手腕结构,其主要包括J5轴输入锥齿轮100、J5减速机组件200、J6减速机组件300、J6轴输入锥齿轮400和J6轴传动过渡组件500五个部分,且J5减速机组件200以及J6减速机组件300均以组件的形式进行安装,简化了设计流程,降低了安装难度。
J5减速机组件200的J5减速机输入锥齿轮201与J5轴输入锥齿轮100齿合连接,J5轴输入锥齿轮100传动连接J5电机;J6减速机组件300的J6减速机输入锥齿轮301通过J6轴传动过渡组件500与J6轴输入锥齿轮400齿合连接,J6轴输入锥齿轮400传动连接J6电机。该6轴大负载工业机器人手腕结构的5、6轴采用了电机后置的传功方式,有效减轻了手腕部分的重量,提高了机器人的有效负载能力,降低了对5、6轴减速机选定的要求,采用此手腕结构后,5、6轴减速机只需外接一根输出轴,避免了过多定制的要求,克服现有6轴机器人的不足。
在一些实施例中,如图2和图3所示,J5减速机组件200主要包括J5减速机输入锥齿轮201、J5双列角接触球轴承202、J5双列角接触球轴承压盖203、J5减速机转接法兰204和J5减速机本体205,在该J5减速机组件200通过使用双列角接触球轴承202固定安装在J5减速机转接法兰204上,有效的承担了锥齿轮专递过程中的轴向载荷,避免了轴向力对减速机带来的不利影响。
在其中的一个实施例中,如图2和图3所示,J5减速机输入锥齿轮201通过J5平键209与J5减速机本体205的输入轴连接,并且J5减速机输入锥齿轮201的下部外圈与J5双列角接触球轴承202的内圈相配合,配合后通过位于J5双列角接触球轴承202顶部的第一J5螺钉210和位于J5双列角接触球轴承202底部的J5双列角接触球轴承内圈压盖211进行固定。使得J5减速机输入锥齿轮201的上端固定在J5减速机本体205的输入轴上,下端套设在J5双列角接触球轴承202上起到一定的限位作用。
在其中的一个实施例中,如图2和图3所示,J5双列角接触球轴承202的外圈安装于J5减速机转接法兰204内,并通过J5双列角接触球轴承压盖203和第二J5螺钉212对其外圈进行固定,有效保证了J5双列角接触球轴承202在锥齿轮专递过程中的轴向载荷的稳定性。
在其中的一个实施例中,如图3所示,为保证J5减速机转接法兰204在锥齿轮专递过程中的稳定性,避免因J5减速机转接法兰204松动造成J5双列角接触球轴承202不稳定,故需保证J5减速机转接法兰204相对J5减速机本体205的稳定性,将J5减速机转接法兰204通过位于内圈的第三J5螺钉207和位于外圈的第四J5螺钉208与J5减速机本体205连接,内外圈装配的第三J5螺钉207和第四J5螺钉208为若干组,沿J5减速机转接法兰204的周向等距间隔布置,可将该J5减速机转接法兰204牢固地固定在J5减速机本体205上。
在其中的一个实施例中,如图2所示,J5减速机组件200还包括J5减速机盖板206,其中:J5减速机盖板206密封装配于J5减速机本体205的背面,即将J5减速机盖板206安装到J5减速机本体205的背面并进行相应的密封。
在一些实施例中,如图4和图5所示,J6减速机组件300包括J6减速机输入锥齿轮301、J6双列角接触球轴承302、J6双列角接触球轴承压盖303、J6减速机转接法兰304以及J6减速机本体305,该J6减速机组件通过将J6双列角接触球轴承302固定安装在所对应的6减速机转接法兰304上,有效的承担了锥齿轮专递过程中的轴向载荷,避免了轴向力对减速机带来的不利影响。
在其中的一个实施例中,如图3和图4所示,J6减速机输入锥齿轮301通过J6平键309与J6减速机本体305的输入轴连接,并且J6减速机输入锥齿轮301与J6双列角接触球轴承302的内圈相配合,配合后通过位于J6减速机输入锥齿轮301顶部的第一J6螺钉312和位于J6双列角接触球轴承302底部的卡簧310进行轴向固定。使得J6减速机输入锥齿轮301的上端固定在J6减速机本体305的输入轴上,下端套设在J6双列角接触球轴承302上起到一定的限位作用。
在其中的一个实施例中,如图3和图4所示,J6双列角接触球轴承302的外圈安装于J6减速机转接法兰304内,并通过J6双列角接触球轴承压盖303和第二J6螺钉311对其外圈进行固定,有效保证了J6双列角接触球轴承302在锥齿轮专递过程中的轴向载荷的稳定性。
在其中的一个实施例中,如图3和图4所示,为保证J6减速机转接法兰304在锥齿轮专递过程中的稳定性,避免因J6减速机转接法兰304松动造成J6双列角接触球轴承302不稳定,故需保证J6减速机转接法兰304相对J6减速机本体305的稳定性,将J6减速机转接法兰304通过第三J6螺钉307和第四J6螺钉308与J6减速机本体305连接。第三J6螺钉307和第四J6螺钉308至少为两组,沿J6减速机转接法兰304的周向等距间隔布置,可将该J6减速机转接法兰304牢固地固定在J6减速机本体305上。
在其中的一个实施例中,如图3和图4所示,J6减速机组件300还包括J6减速机输出法兰306,J6减速机输出法兰306密封装配于J6减速机本体305的背面,,即将J5减速机盖板206安装到J5减速机本体205的背面并也进行相应的密封。
在一些实施例中,如图1所示,J5轴输入锥齿轮100通过双列圆锥滚子轴承可转动装配于J5箱体内。且J6轴输入锥齿轮400通过轴承装配于J5轴输入锥齿轮100内,即J6轴输入锥齿轮400与J5轴输入锥齿轮100同轴心布置,缩小了体积占比,提高了空间利用率。
在另外的一些实施例中,如图1所示,J6轴传动过渡组件500包括J6轴主动直齿轮传动组件501、J6轴从动直齿轮传动组件502,J6轴主动直齿轮传动组件501的输入端为锥齿轮,与J6轴输入锥齿轮400齿合连接;以及J6轴从动直齿轮传动组件502的输出端亦为锥齿轮,与J6减速机输入锥齿轮301齿合连接;和J6轴主动直齿轮传动组件501输出端和J6轴从动直齿轮传动组件502的输出端亦为直齿轮,两直齿轮之间通过直齿轮啮合进行连接。
本发明提供的6轴大负载工业机器人手腕结构,采用了电机后置的传功方式,有效减轻了手腕部分的重量,提高了机器人的有效负载能力,同时锥齿轮与减速机传递的位置采用了转接法兰以及双列角接触球轴承,避免了锥齿轮传递过程中轴向载荷对减速机的影响,同时也降低了对减速机的要求。
以上对本发明的具体实施例进行了详细描述,但其只是作为范例,本发明并不限制于以上描述的具体实施例。对于本领域技术人员而言,任何对本发明进行的等同修改和替代也都在本发明的范畴之中。因此,在不脱离本发明的精神和范围下所作的均等变换和修改,都应涵盖在本发明的范围内。
Claims (10)
1.一种6轴大负载工业机器人手腕结构,其特征在于,包括J5轴输入锥齿轮(100)、J5减速机组件(200)、J6减速机组件(300)、J6轴输入锥齿轮(400)和J6轴传动过渡组件(500);其中:
所述J5减速机组件(200)的J5减速机输入锥齿轮(201)与所述J5轴输入锥齿轮(100)齿合连接,所述J5轴输入锥齿轮(100)传动连接J5电机;
所述J6减速机组件(300)的J6减速机输入锥齿轮(301)通过所述J6轴传动过渡组件(500)与所述J6轴输入锥齿轮(400)齿合连接,所述J6轴输入锥齿轮(400)传动连接J6电机。
2.根据权利要求1所述的6轴大负载工业机器人手腕结构,其特征在于,所述J5减速机组件(200)包括J5减速机输入锥齿轮(201)、J5双列角接触球轴承(202)、J5双列角接触球轴承压盖(203)、J5减速机转接法兰(204)和J5减速机本体(205),其中:
所述J5减速机输入锥齿轮(201)通过J5平键(209)与所述J5减速机本体(205)的输入轴连接,并与所述J5双列角接触球轴承(202)的内圈相配合,配合后通过所述第一J5螺钉(210)、J5双列角接触球轴承内圈压盖(211)进行固定;
所述J5双列角接触球轴承(202)的外圈安装于所述J5减速机转接法兰(204)内,并通过J5双列角接触球轴承压盖(203)和第二J5螺钉(212)对其外圈进行固定。
3.根据权利要求2所述的6轴大负载工业机器人手腕结构,其特征在于,所述J5减速机转接法兰(204)通过位于内圈的第三J5螺钉(207)和位于外圈的第四J5螺钉(208)与所述J5减速机本体(205)连接。
4.根据权利要求2所述的6轴大负载工业机器人手腕结构,其特征在于,所述J5减速机组件(200)还包括J5减速机盖板(206),其中:
所述J5减速机盖板(206)密封装配于所述J5减速机本体(205)的背面。
5.根据权利要求1所述的6轴大负载工业机器人手腕结构,其特征在于,所述J6减速机组件(300)包括J6减速机输入锥齿轮(301)、J6双列角接触球轴承(302)、J6双列角接触球轴承压盖(303)、J6减速机转接法兰(304)以及J6减速机本体(305),其中:
所述J6减速机输入锥齿轮(301)通过J6平键(309)与所述J6减速机本体(305)的输入轴连接,并与所述J6双列角接触球轴承(302)的内圈相配合,配合后通过第一J6螺钉(312)和卡簧(310)进行轴向固定;
所述J6双列角接触球轴承(302)的外圈安装于所述J6减速机转接法兰(304)内,并通过所述J6双列角接触球轴承压盖(303)和第二J6螺钉(311)对其外圈进行固定。
6.根据权利要求5所述的6轴大负载工业机器人手腕结构,其特征在于,所述J6减速机转接法兰(304)通过第三J6螺钉(307)和第四J6螺钉(308)与所述J6减速机本体(305)连接。
7.根据权利要求5所述的6轴大负载工业机器人手腕结构,其特征在于,所述J6减速机组件(300)还包括J6减速机输出法兰(306),其中:
所述J6减速机输出法兰(306)密封装配于所述J6减速机本体(305)的背面。
8.根据权利要求1所述的6轴大负载工业机器人手腕结构,其特征在于,所述J5轴输入锥齿轮(100)通过双列圆锥滚子轴承装配于J5箱体内。
9.根据权利要求1所述的6轴大负载工业机器人手腕结构,其特征在于,所述J6轴输入锥齿轮(400)通过轴承装配于所述J5轴输入锥齿轮(100)内。
10.根据权利要求1所述的6轴大负载工业机器人手腕结构,其特征在于,所述J6轴传动过渡组件(500)包括J6轴主动直齿轮传动组件(501)、J6轴从动直齿轮传动组件(502),其中:
所述J6轴主动直齿轮传动组件(501)的输入端为锥齿轮,与所述J6轴输入锥齿轮(400)齿合连接;以及
所述J6轴从动直齿轮传动组件(502)的输出端亦为锥齿轮,与所述J6减速机输入锥齿轮(301)齿合连接;和
所述J6轴主动直齿轮传动组件(501)输出端和所述J6轴从动直齿轮传动组件(502)的输出端亦为直齿轮,两直齿轮之间通过直齿轮啮合进行连接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011057609.4A CN112171651A (zh) | 2020-09-30 | 2020-09-30 | 一种6轴大负载工业机器人手腕结构 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011057609.4A CN112171651A (zh) | 2020-09-30 | 2020-09-30 | 一种6轴大负载工业机器人手腕结构 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112171651A true CN112171651A (zh) | 2021-01-05 |
Family
ID=73947127
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011057609.4A Pending CN112171651A (zh) | 2020-09-30 | 2020-09-30 | 一种6轴大负载工业机器人手腕结构 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112171651A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114872080A (zh) * | 2022-04-11 | 2022-08-09 | 烟台艾迪艾创机器人科技有限公司 | 一种机器人末端腕部结构 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2504051A1 (fr) * | 1981-04-15 | 1982-10-22 | Jungheinrich Kg | Tete articulee pour robot industriel |
| JPH054188A (ja) * | 1991-01-31 | 1993-01-14 | Yaskawa Electric Corp | 産業用ロボツトの手首機構 |
| CN203697030U (zh) * | 2014-02-25 | 2014-07-09 | 北京邮电大学世纪学院 | 一种机器人手腕机构 |
| CN203836153U (zh) * | 2014-06-25 | 2014-09-17 | 台州长城机械制造有限公司 | 螺旋减速箱 |
| CN106426264A (zh) * | 2016-11-09 | 2017-02-22 | 常州机电职业技术学院 | 一种具有内置传动轴的机器人手腕 |
| CN207309971U (zh) * | 2017-06-12 | 2018-05-04 | 巨轮(广州)机器人与智能制造有限公司 | 一种六轴工业机器人手腕结构 |
| CN109591043A (zh) * | 2017-09-30 | 2019-04-09 | 沈阳新松机器人自动化股份有限公司 | 一种偏置型腕关节 |
| CN210371932U (zh) * | 2019-06-13 | 2020-04-21 | 湖北科峰传动设备有限公司 | 具有两种速比和两方向输出的直角行星减速机 |
-
2020
- 2020-09-30 CN CN202011057609.4A patent/CN112171651A/zh active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2504051A1 (fr) * | 1981-04-15 | 1982-10-22 | Jungheinrich Kg | Tete articulee pour robot industriel |
| JPH054188A (ja) * | 1991-01-31 | 1993-01-14 | Yaskawa Electric Corp | 産業用ロボツトの手首機構 |
| CN203697030U (zh) * | 2014-02-25 | 2014-07-09 | 北京邮电大学世纪学院 | 一种机器人手腕机构 |
| CN203836153U (zh) * | 2014-06-25 | 2014-09-17 | 台州长城机械制造有限公司 | 螺旋减速箱 |
| CN106426264A (zh) * | 2016-11-09 | 2017-02-22 | 常州机电职业技术学院 | 一种具有内置传动轴的机器人手腕 |
| CN207309971U (zh) * | 2017-06-12 | 2018-05-04 | 巨轮(广州)机器人与智能制造有限公司 | 一种六轴工业机器人手腕结构 |
| CN109591043A (zh) * | 2017-09-30 | 2019-04-09 | 沈阳新松机器人自动化股份有限公司 | 一种偏置型腕关节 |
| CN210371932U (zh) * | 2019-06-13 | 2020-04-21 | 湖北科峰传动设备有限公司 | 具有两种速比和两方向输出的直角行星减速机 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114872080A (zh) * | 2022-04-11 | 2022-08-09 | 烟台艾迪艾创机器人科技有限公司 | 一种机器人末端腕部结构 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| GB2587157A (en) | Axle assembly for low floor vehicle | |
| CN203317423U (zh) | 一种六轴自由度机械手 | |
| CN110774277A (zh) | 蛇形臂三自由度手腕关节及运动方法 | |
| JP3537438B2 (ja) | N個の出力を有する差動装置 | |
| CN112171651A (zh) | 一种6轴大负载工业机器人手腕结构 | |
| CN211220700U (zh) | 蛇形臂三自由度手腕关节 | |
| CN112066155B (zh) | 一种可差速支撑轮式管道机器人 | |
| CN217967078U (zh) | 工业机器人三轴传动机构 | |
| CN208578930U (zh) | 一种消隙齿轮箱 | |
| CN215618179U (zh) | 一种工业机器人手腕和机器人 | |
| CN210034302U (zh) | 一种大速比中空式行星减速机 | |
| CN113669419A (zh) | 一种可变减速比的减速机构 | |
| CN109695664B (zh) | 一种直升机用分扭传动减速装置 | |
| CN112873243A (zh) | 一种喷涂机器人的手腕 | |
| CN217926968U (zh) | 一种用于农机动力输出的机械臂 | |
| CN219639388U (zh) | 一种新型角度定位齿轮箱 | |
| CN216407631U (zh) | 行星轮减速器 | |
| CN218082780U (zh) | 机器人关节及机器人 | |
| CN113217585B (zh) | 一种前轮双驱叉车用轮边减速机构 | |
| CN211082771U (zh) | 一种轮式机器人专用蜗轮蜗杆减速机 | |
| CN219221169U (zh) | 一种适用于大载荷的减速装置 | |
| CN212055691U (zh) | 一种平行轴式行星减速机 | |
| CN213381628U (zh) | 工业机器人手腕结构 | |
| CN219327761U (zh) | 一种长使用寿命的行星齿轮减速机结构 | |
| CN219132365U (zh) | 一种机器人手腕关节动力结构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| CB02 | Change of applicant information | ||
| CB02 | Change of applicant information |
Address after: 201306 201B, building 6, No. 600, Xinyuan South Road, Lingang New District, China (Shanghai) pilot Free Trade Zone, Pudong New Area, Shanghai Applicant after: Shanghai carrier Intelligent Technology Co.,Ltd. Address before: 201306 C tower 888, two West Road, Pudong New Area, Shanghai. Applicant before: Shanghai carrier Intelligent Technology Co.,Ltd. |