CN112120723A - 基于高精度加速计的滑环采样点计算方法 - Google Patents
基于高精度加速计的滑环采样点计算方法 Download PDFInfo
- Publication number
- CN112120723A CN112120723A CN202010944486.XA CN202010944486A CN112120723A CN 112120723 A CN112120723 A CN 112120723A CN 202010944486 A CN202010944486 A CN 202010944486A CN 112120723 A CN112120723 A CN 112120723A
- Authority
- CN
- China
- Prior art keywords
- axis
- slip ring
- alpha
- accelerometer
- sampling point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/02—Devices for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computerised tomographs
- A61B6/032—Transmission computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4429—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/56—Details of data transmission or power supply, e.g. use of slip rings
Abstract
本发明涉及医学影像设备技术领域,尤其涉及一种基于高精度加速计的滑环采样点计算方法,使用加速计并通过计算即可得出滑环的实时位置,无需再进行复位;采样点可配置,无需滑环孔位支持,所以可以适配原来不同孔位的滑环系统;此方法基于高精度加速计,实时性和可靠性高,可以取代现有有孔滑环。
Description
技术领域
本发明涉及医学影像设备技术领域,尤其涉及一种基于高精度加速计的滑环采样点计算方法。
背景技术
现有CT系统的滑环定位和探测器数据采样点输出都是依赖于滑环上的特定孔位来实现,如系统判断滑环的位置需要先设置起始位,即把滑环转到滑环上的零度位置,然后根据读取滑环上的孔数来判断当前滑环的角度位置。当滑环上的孔位被遮挡时,会影响到系统的正常运行,探测器数据可能会不正常,并且此类问题故障点调查比较困难;此外,现在使用的滑环孔位有1024和1440两种,如果CT系统需要更换采样点个数,需要更换整个滑环及对应的传感器模块,这个过程非常麻烦,不易操作。
基于此,本案由此提出。
发明内容
为解决上述问题,本发明的目的在于提供一种基于高精度加速计的滑环采样点计算方法。
为了实现上述目的,本发明的技术方案如下:
一种基于高精度加速计的滑环采样点计算方法,包括安装有加速计的滑环,通过读取,可获取加速计处X轴和Y轴的加速度值,所述滑环采样点计算方法包括以下步骤:
S1. 设定滑环起始位,当滑环位于0°位置时,加速计X轴的加速度值为0,Y轴的加速度值为g,当滑环位于180°位置时,加速计X轴的加速度值为0,Y轴的加速度值为-g,其中g为引力值常数;
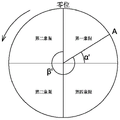
S2.定义滑环转至任一采样点A时,旋转的角度为β’,该采样点与X轴的最小夹角为α’,0°≤α’<90°,则此时加速计X轴的加速度值的绝对值为gx’,Y轴的加速度值的绝对值为g,通过三角关系计算tanα’=g/gx’,则α’=tan-1 g/gx’;
S3. 滑环当前位置β’计算:当X轴的输出值为正,Y轴输出值为正,则α’位于第一象限,β’=270°+α’;当X轴的输出为正,Y轴输出值为负,则α’位于第四象限,β’=270°-α’;当X轴的输出为负,Y轴输出值为负,则α’位于第三象限,β’=90°+α’;当X轴的输出为负,Y轴输出值为正,则α’位于第二象限,β’=90°-α’。
进一步的,所述滑环采样点计算方法还包括以下步骤:
S4.定义滑环转至与采样点A相邻的采样点B时,旋转的角度为β’’,该采样点与X轴的最小夹角为α’’, 则此时加速计X轴的加速度值的绝对值为gx’’,Y轴的加速度值的绝对值为g,通过步骤S2的计算,可得出α’’=tan-1 g/ gx’’ ,通过步骤S3的计算,可得出滑环当前位置β’’;
S5.计算相邻采样点的夹角Δβ=∣β’’-β’∣;采样点个数可以根据Δβ的值大小来进行控制,即采样点个数n=360°/Δβ。
本发明的优点在于:使用加速计并通过计算即可得出滑环的实时位置,无需再进行复位;采样点可配置,无需滑环孔位支持,所以可以适配原来不同孔位的滑环系统;此方法基于高精度加速计,实时性和可靠性高,可以取代现有有孔滑环。
附图说明
图1 为实施例中α’位于第一象限时的角度计算示意图;
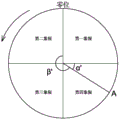
图2为实施例中α’ 位于第四象限时的角度计算示意图;
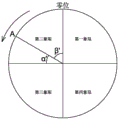
图3为实施例中α’ 位于第三象限时的角度计算示意图;
图4为实施例中α’ 位于第二象限时的角度计算示意图;
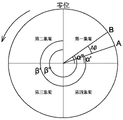
图5为实施例中α’和α’’均位于第一象限时的角度计算示意图。
具体实施方式
以下结合实施例对本发明作进一步详细描述。
本实施例提出一种基于高精度加速计的滑环采样点计算方法,包括安装有加速计的滑环,通过读取,可获取加速计处X轴和Y轴的加速度值,所述滑环采样点计算方法包括以下步骤:
S1. 设定滑环起始位,当滑环位于0°位置时,加速计X轴的加速度值为0,Y轴的加速度值为g,当滑环位于180°位置时,加速计X轴的加速度值为0,Y轴的加速度值为-g,其中g为引力值常数;
S2.定义滑环转至任一采样点A时,旋转的角度为β’,该采样点与X轴的最小夹角为α’,0°≤α’<90°,则此时加速计X轴的加速度值的绝对值为gx’,Y轴的加速度值的绝对值为g,通过三角关系计算tanα’=g/gx’,则α’=tan-1 g/gx’;
S3. 根据零位、计算出的α’和α’所在的象限,即可计算出滑环当前的位置信息,即β’值:
如图1所示,当X轴的输出值为正,Y轴输出值为正,则α’位于第一象限,β’=270°+α’;
如图2所示,当X轴的输出为正,Y轴输出值为负,则α’位于第四象限,β’=270°-α’;
如图3所示,当X轴的输出为负,Y轴输出值为负,则α’位于第三象限,β’=90°+α’;
如图就4所示,当X轴的输出为负,Y轴输出值为正,则α’位于第二象限,β’=90°-α’。
所述滑环采样点计算方法还包括以下步骤:
S4.定义滑环转至与采样点A相邻的采样点B时,旋转的角度为β’’,该采样点与X轴的最小夹角为α’’, 则此时加速计X轴的加速度值的绝对值为gx’’,Y轴的加速度值的绝对值为g,通过步骤S2的计算,可得出α’’=tan-1 g/ gx’’ ,通过步骤S3的计算,可得出滑环当前位置β’’;
S5.计算相邻采样点的夹角Δβ=∣β’’-β’∣,如图5所示,以α’和α’’均位于第一象限所示,Δβ=∣β’’-β’∣=∣(270°+α’’)-(270°+α’)∣=∣α’’-α’∣=
∣tan-1 g/ gx’’- tan-1 g/ gx’∣。
采样点个数可以根据Δβ的值大小来进行控制,即采样点个数n=360°/Δβ,由此n是关于gx的一个函数,可见本方案中,采样点个数的配置可由滑环的加速度来控制,而无需滑环孔位支持。
上述实施例仅用于解释说明本发明的构思,而非对本发明权利保护的限定,凡利用此构思对本发明进行非实质性的改动,均应落入本发明的保护范围。
Claims (2)
1.一种基于高精度加速计的滑环采样点计算方法,其特征在于:包括安装有加速计的滑环,通过读取,可获取加速计处X轴和Y轴的加速度值,所述滑环采样点计算方法包括以下步骤:
S1. 设定滑环起始位,当滑环位于0°位置时,加速计X轴的加速度值为0,Y轴的加速度值为g,当滑环位于180°位置时,加速计X轴的加速度值为0,Y轴的加速度值为-g,其中g为引力值常数;
S2.定义滑环转至任一采样点A时,旋转的角度为β’,该采样点与X轴的最小夹角为α’,0°≤α’<90°,则此时加速计X轴的加速度值的绝对值为gx’,Y轴的加速度值的绝对值为g,通过三角关系计算tanα’=g/gx’,则α’=tan-1 g/gx’;
S3. 滑环当前位置β’计算:当X轴的输出值为正,Y轴输出值为正,则α’位于第一象限,β’=270°+α’;当X轴的输出为正,Y轴输出值为负,则α’位于第四象限,β’=270°-α’;当X轴的输出为负,Y轴输出值为负,则α’位于第三象限,β’=90°+α’;当X轴的输出为负,Y轴输出值为正,则α’位于第二象限,β’=90°-α’。
2.如权利要求1所述的一种基于高精度加速计的滑环采样点计算方法,其特征在于:所述滑环采样点计算方法还包括以下步骤:
S4.定义滑环转至与采样点A相邻的采样点B时,旋转的角度为β’’,该采样点与X轴的最小夹角为α’’, 则此时加速计X轴的加速度值的绝对值为gx’’,Y轴的加速度值的绝对值为g,通过步骤S2的计算,可得出α’’=tan-1 g/ gx’’ ,通过步骤S3的计算,可得出滑环当前位置β’’;
S5.计算相邻采样点的夹角Δβ=∣β’’-β’∣;采样点个数可以根据Δβ的值大小来进行控制,即采样点个数n=360°/Δβ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010944486.XA CN112120723A (zh) | 2020-09-10 | 2020-09-10 | 基于高精度加速计的滑环采样点计算方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010944486.XA CN112120723A (zh) | 2020-09-10 | 2020-09-10 | 基于高精度加速计的滑环采样点计算方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112120723A true CN112120723A (zh) | 2020-12-25 |
Family
ID=73845170
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010944486.XA Pending CN112120723A (zh) | 2020-09-10 | 2020-09-10 | 基于高精度加速计的滑环采样点计算方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112120723A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112932514A (zh) * | 2021-01-29 | 2021-06-11 | 明峰医疗系统股份有限公司 | 飞焦点模式下的虚拟积分时间的插值计算方法、系统、成像方法和计算机可读存储介质 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6873931B1 (en) * | 2000-10-10 | 2005-03-29 | Csi Technology, Inc. | Accelerometer based angular position sensor |
| CN101112317A (zh) * | 2006-07-28 | 2008-01-30 | Ge医疗系统环球技术有限公司 | X射线计算机断层摄影设备 |
| CN102165395A (zh) * | 2008-06-27 | 2011-08-24 | 莫韦公司 | 具有滚转补偿的手持指示设备 |
| CN103185563A (zh) * | 2011-12-30 | 2013-07-03 | 上海西门子医疗器械有限公司 | 一种角度计算装置 |
| CN110584691A (zh) * | 2018-06-13 | 2019-12-20 | 西门子医疗有限公司 | 具有加速度传感器的计算机断层扫描设备 |
-
2020
- 2020-09-10 CN CN202010944486.XA patent/CN112120723A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6873931B1 (en) * | 2000-10-10 | 2005-03-29 | Csi Technology, Inc. | Accelerometer based angular position sensor |
| CN101112317A (zh) * | 2006-07-28 | 2008-01-30 | Ge医疗系统环球技术有限公司 | X射线计算机断层摄影设备 |
| CN102165395A (zh) * | 2008-06-27 | 2011-08-24 | 莫韦公司 | 具有滚转补偿的手持指示设备 |
| CN103185563A (zh) * | 2011-12-30 | 2013-07-03 | 上海西门子医疗器械有限公司 | 一种角度计算装置 |
| CN110584691A (zh) * | 2018-06-13 | 2019-12-20 | 西门子医疗有限公司 | 具有加速度传感器的计算机断层扫描设备 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112932514A (zh) * | 2021-01-29 | 2021-06-11 | 明峰医疗系统股份有限公司 | 飞焦点模式下的虚拟积分时间的插值计算方法、系统、成像方法和计算机可读存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1712889B (zh) | 编码器及其信号调整方法 | |
| TWI650528B (zh) | 旋轉角度檢測裝置及旋轉角度檢測方法 | |
| US6823279B1 (en) | Spectral method for calibrating a multi-axis accelerometer device | |
| CN203219237U (zh) | 零位校验器 | |
| CN110463020A (zh) | 电机的初始机械角度的获取方法及系统 | |
| CN112120723A (zh) | 基于高精度加速计的滑环采样点计算方法 | |
| CN111521212A (zh) | 磁编码器校正系统及方法、控制终端及可读存储介质 | |
| Park et al. | A linear compensation method for improving the accuracy of an absolute multipolar magnetic encoder | |
| CN108981746B (zh) | 转台标校方法及装置 | |
| CN116759358A (zh) | 一种晶圆边缘对准方法及系统 | |
| CN110673657B (zh) | 一种稳定平台角度自动补偿解算方法 | |
| CN115302506A (zh) | 关节模组的测试方法、装置、设备和存储介质 | |
| CN110146290B (zh) | 一种基于定位普遍法则的滚动轴承外圈缺陷定位诊断方法 | |
| CN111912428A (zh) | 一种检测陀螺仪的方法和系统 | |
| JP2006138778A (ja) | 角度検出装置 | |
| CN111220817A (zh) | 一种捷联惯组三轴加速度计的标定方法 | |
| CN106595584B (zh) | 天线姿态数据获取装置、获取方法及天线装置 | |
| CN101010566B (zh) | 带绝对角度传感器的轴承装置 | |
| CN209570317U (zh) | 一种方向自校正振动传感器 | |
| JP2004361212A (ja) | 回転角度検出装置 | |
| CN209878287U (zh) | 一种轴系动态阻力矩测试装置 | |
| RU2044274C1 (ru) | Стенд для контроля прецизионного гироскопического датчика угловой скорости | |
| JP2023538316A (ja) | 磁気ターンカウンタエラーを検出するためのシステム及び方法 | |
| RU2115128C1 (ru) | Стенд для контроля измерителей угловых скоростей | |
| JPH06147814A (ja) | 回転角度検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20201225 |
|
| RJ01 | Rejection of invention patent application after publication |