CN111792020B - 一种基于sma驱动的折叠式伞翼无人机 - Google Patents
一种基于sma驱动的折叠式伞翼无人机 Download PDFInfo
- Publication number
- CN111792020B CN111792020B CN202010694239.9A CN202010694239A CN111792020B CN 111792020 B CN111792020 B CN 111792020B CN 202010694239 A CN202010694239 A CN 202010694239A CN 111792020 B CN111792020 B CN 111792020B
- Authority
- CN
- China
- Prior art keywords
- rod
- unfolding
- wing
- folding
- hinged
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 claims abstract description 9
- 230000007246 mechanism Effects 0.000 claims description 81
- 238000010438 heat treatment Methods 0.000 claims description 23
- 230000006835 compression Effects 0.000 claims description 15
- 238000007906 compression Methods 0.000 claims description 15
- 230000009467 reduction Effects 0.000 claims description 15
- 239000011229 interlayer Substances 0.000 claims description 12
- 238000005096 rolling process Methods 0.000 claims description 10
- 230000033001 locomotion Effects 0.000 claims description 8
- 239000012634 fragment Substances 0.000 claims description 6
- 230000003287 optical effect Effects 0.000 claims description 4
- 230000008569 process Effects 0.000 abstract description 7
- 239000010410 layer Substances 0.000 description 10
- 230000007480 spreading Effects 0.000 description 5
- 230000008602 contraction Effects 0.000 description 3
- RZVHIXYEVGDQDX-UHFFFAOYSA-N 9,10-anthraquinone Chemical group C1=CC=C2C(=O)C3=CC=CC=C3C(=O)C2=C1 RZVHIXYEVGDQDX-UHFFFAOYSA-N 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000004083 survival effect Effects 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C3/00—Wings
- B64C3/18—Spars; Ribs; Stringers
- B64C3/187—Ribs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C19/00—Aircraft control not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C25/00—Alighting gear
- B64C25/02—Undercarriages
- B64C25/08—Undercarriages non-fixed, e.g. jettisonable
- B64C25/10—Undercarriages non-fixed, e.g. jettisonable retractable, foldable, or the like
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C25/00—Alighting gear
- B64C25/02—Undercarriages
- B64C25/08—Undercarriages non-fixed, e.g. jettisonable
- B64C25/10—Undercarriages non-fixed, e.g. jettisonable retractable, foldable, or the like
- B64C25/18—Operating mechanisms
- B64C25/26—Control or locking systems therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C3/00—Wings
- B64C3/26—Construction, shape, or attachment of separate skins, e.g. panels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C3/00—Wings
- B64C3/38—Adjustment of complete wings or parts thereof
- B64C3/56—Folding or collapsing to reduce overall dimensions of aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C9/00—Adjustable control surfaces or members, e.g. rudders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/40—Arrangements for mounting power plants in aircraft
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/40—Weight reduction
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- Toys (AREA)
Abstract
一种基于SMA驱动的折叠式伞翼无人机,属于无人机技术领域,本发明为了解决现有伞翼无人机在使用过程中需要人工手动进行两次伞翼机的拆解工作,操作复杂,自动化程度不高,且飞行前后拆解的各部件需要通过交通工具进行运送,增加了其使用成本的问题,本发明所述无人机包括收展组件、机身主体和控制系统,收展组件安装在机身主体上,控制系统控制收展机构和机身主体的工作。本发明提供了一种伞翼可以自动张开和收缩的无人机,自动化程度高,节约了无人机机翼组装和拆卸过程中的成本。
Description
技术领域
本发明属于无人机技术领域,具体涉及一种基于SMA驱动的折叠式伞翼无人机。
背景技术
无人驾驶飞机简称无人机,是一种利用无线遥控或程序控制来执行特定航空任务的不载人飞行器,具有反应迅速、机动灵活、生存能力强、操作要求低的优点。近年来,随着飞控核心技术的成熟以及新型轻质材料的广泛应用,无人机在军事、民用、科研三大领域内的作用逐渐凸显,具体应用于战场侦察、航空拍摄、抢险救灾、物流运输等方面,已成为未来航空发展趋势之一。
传统的伞翼无人机只能进行简单的折叠、拆装存放,在使用过程中需要人工手动进行两次伞翼机的拆解工作,操作复杂,自动化程度不高,且飞行前后拆解的各部件需要通过交通工具进行运送,增加了其使用成本。因此,伞翼无人机需要设计有更优化的收展机构。
发明内容
本发明为了解决现有伞翼无人机在使用过程中需要人工手动进行两次伞翼机的拆解工作,操作复杂,自动化程度不高,且飞行前后拆解的各部件需要通过交通工具进行运送,增加了其使用成本的问题,进而提供一种基于SMA驱动的折叠式伞翼无人机;
一种基于SMA驱动的折叠式伞翼无人机,所述无人机包括收展组件、机身主体和控制系统,收展组件安装在机身主体上,控制系统控制收展机构和机身主体的工作;
进一步地,所述收展组件包连杆机构、展开驱动机构和锁定机构,所述连杆机构安装在展开驱动机构上,锁定机构安装在连杆机构上,展开驱动机构安装在机身主体上;
进一步地,所述连杆机构包括龙骨、主滑块、固定块和两个展翼结构,所述主滑块和固定块结构相同,龙骨包括滑动杆和限位杆,滑动杆的一端和限位杆一端一体设置,且滑动杆的端面直径小于限位杆的端面直径,滑动杆的一端插装在固定块的下部,主滑块套设在滑动杆上,且主滑块与滑动杆滑动连接,两个展翼结构相对设置在龙骨的两侧,且每个展翼结构的一端与主滑块铰接,每个展翼结构的另一端与固定块铰接;
进一步地,所述展翼结构包括前缘杆、导向滑块、第一翼肋杆、第二翼肋杆、辅助三角架和辅助杆,所述前缘杆的一端与固定块的中部铰接,前缘杆的另一端顶部铰接有导向滑块,辅助杆为折杆,辅助杆中长杆末端设置在导向滑块中,且辅助杆中长杆与导向滑块滑动连接,辅助杆的折点处与第一翼肋杆的一端铰接,辅助杆的短杆末端与第二翼肋杆的一端铰接,辅助三角架的三个顶点处分别与主滑块的上部、第一翼肋杆中部和第二翼肋杆的另一端铰接,第一翼肋杆的另一端与固定块的上部铰接,第一翼肋杆中设有第一夹层,第一夹层的高度与辅助三角架的厚度相同,第二翼肋杆中设有第二夹层,第二夹层的高度与辅助杆的厚度相同;
进一步地,所述展开驱动机构包括滚珠丝杠、展开步进电机和减速齿轮机构,所述滚珠丝杠设置在滑动杆的上方,滚珠丝杠的一端设置在固定块上并与固定块转动连接,主滑块套设在滚珠丝杠上,且主滑块与滚珠丝杠滑动连接,展开步进电机通过电机支架固定在限位杆上,展开步进电机的输出轴插装在减速齿轮机构的输入端,滚珠丝杠的另一端插装在减速齿轮机构的输出端;
进一步地,所述锁定机构包括两个压缩弹簧和插销,所述滑动杆的底部加工有插销运动槽,插销运动槽的一端上设有一个定位槽,压缩弹簧设置在主滑块与滑动杆的接触处,每个压缩弹簧的一端与主滑块固定连接,每个压缩弹簧的另一端与插销底部固定连接,插销上部设置在插销运动槽中;
进一步地,所述机身主体包括仰角控制机构、横滚角控制机构、动力装置和可折叠起落架;
仰角控制机构包括推杆电机和俯仰转接环,所述推杆电机的壳体与可折叠起落架的顶部铰接,推杆电机的推杆端通过俯仰转接环与龙骨中的滑动杆相连,俯仰转接环设置滑动杆靠近固定块的一端处;
横滚角控制机构包括电控加热装置和基于SMA弹簧驱动的舵机机构,电控加热装置通过固定架固接在可折叠起落架的顶部,基于SMA弹簧驱动的舵机机构的输入端与电控加热装置的输出端相连,基于SMA弹簧驱动的舵机机构的输出端通过安装板及光轴止推环固定限位杆的末端;
动力装置包括发动机和螺旋桨,发动机通过安装板固定在可折叠起落架的尾部,螺旋桨套装在发动机的输出轴上;
可折叠起落架包括机架、前轮、两个可伸缩前轮减震支柱、两个后轮、可伸缩后轮轮轴、两个三角连接轴和两个收展滑块,所述两个可伸缩前轮减震支柱相对设置,每个可伸缩前轮减震支柱的顶端与机架底部的前端固定连接,前轮设置在两个可伸缩前轮减震支柱之间,前轮通过轮轴与两个可伸缩前轮减震支柱转动连接,两个后轮分别套设在可伸缩后轮轮轴的一端上,且可伸缩后轮轮轴通过两个三角连接轴安装在机架底部的后端上,每个三角连接轴包括一个机身横滚连接轴和一个偏航平面连接轴,机身横滚连接轴的一端与机架侧壁铰接,机身横滚连接轴的另一端与可伸缩后轮轮轴的一端铰接,偏航平面连接轴的一端与可伸缩后轮轮轴的一端固接,偏航平面连接轴的另一端通过一个收展滑块与机架侧壁滑动连接;
进一步地:所述推杆电机的壳体与机架的顶部铰接,电控加热装置通过固定架固接在机架的顶部,发动机通过安装板固定在机架的尾部;
进一步地:所述控制系统控制展开步进电机、电控加热装置和发动机的启停。
本发明与现有技术相比具有以下有益效果:
本发明提供了一种基于SMA驱动的折叠式伞翼无人机,能够实现翼面与起落装置自动收展,无需人工操作,自动化程度高,较大的收展比使伞翼无人机在完全折叠状态下具有更加紧凑的结构,减少了占用空间;同时,在展开过程中自动形成支撑翼面蒙皮的翼肋,翼面部分采用了更多的刚体结构,飞行器稳定性高。
附图说明
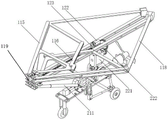
图1为本发明的新型折叠式伞翼无人机的展开状态立体结构示意图;
图2为本发明的新型折叠式伞翼无人机的折叠状态立体结构示意图;
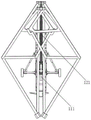
图3为图2的新型折叠式伞翼无人机的折叠状态的俯视图;
图4为本发明的新型折叠式伞翼无人机可折叠起落装置的展开状态立体结构示意图;
图5为本发明的新型折叠式伞翼无人机可折叠起落装置的折叠状态立体结构示意图;
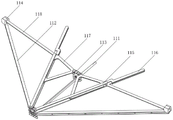
图6为本发明的新型折叠式伞翼无人机的连杆机构立体结构示意图;
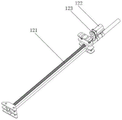
图7为本发明的新型折叠式伞翼无人机的展开驱动机构立体结构示意图;
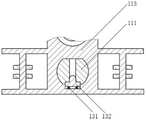
图8为本发明的新型折叠式伞翼无人机的锁定机构在主滑块113处的剖视图。
图中111龙骨、112前缘杆、113主滑块、114导向滑块、115第一翼肋杆、116第二翼肋杆、117辅助三角架、118辅助杆、119固定块、121滚珠丝杠、122展开步进电机、123减速齿轮机构、131压缩弹簧、132插销、211推杆电机、212俯仰转接环、221电控加热装置、222基于SMA弹簧驱动的舵机机构、231发动机、232螺旋桨、241机架、242前轮、243可伸缩前轮减震支柱、244后轮、245可伸缩后轮轮轴、246三角连接轴和247收展滑块
具体实施方式
具体实施方式一:参照图1至图8说明本实施方式,本实施方式提供了一种基于SMA驱动的折叠式伞翼无人机,所述无人机包括收展组件、机身主体和控制系统,收展组件安装在机身主体上,控制系统控制收展机构和机身主体的工作。
本实施方式中提供的一种基于SMA驱动的折叠式伞翼无人机,通过控制系统控制收展机构和机身主体的工作,能够实现翼面与起落装置自动收展,无需人工操作,自动化程度高,较大的收展比使伞翼无人机在完全折叠状态下具有更加紧凑的结构,减少了占用空间;同时,在展开过程中自动形成支撑翼面蒙皮的翼肋,翼面部分采用了更多的刚体结构,飞行器稳定性高。
具体实施方式二:参照图1、图2、图3、图6至图8说明本实施方式,本实施方式是对具体实施方式一所述的收展组件作进一步限定,本实施方式中,所述收展组件包连杆机构、展开驱动机构和锁定机构,所述连杆机构安装在展开驱动机构上,锁定机构安装在连杆机构上,展开驱动机构安装在机身主体上。其它组成及连接方式与具体实施方式一相同。
本实施方式中,展开驱动机构作为动力源可以使连杆机构改变收缩或是张开两种状态,锁定机构可以保证连杆机构在处于任何状态时都可以实现良好的定位,保证其可以在该状态下进行良好的保持。
具体实施方式三:参照图1、图2和图6说明本实施方式,本实施方式是对具体实施方式二所述的连杆机构作进一步限定,本实施方式中,所述连杆机构包括龙骨111、主滑块113、固定块119和两个展翼结构,所述主滑块113和固定块119结构相同,龙骨111包括滑动杆和限位杆,滑动杆的一端和限位杆一端一体设置,且滑动杆的端面直径小于限位杆的端面直径,滑动杆的一端插装在固定块119的上,主滑块113套设在滑动杆上,且主滑块113与滑动杆滑动连接,两个展翼结构相对设置在龙骨111的两侧,且每个展翼结构的一端与主滑块113铰接,每个展翼结构的另一端与固定块119铰接。其它组成及连接方式与具体实施方式二相同。
本实施方式中,主滑块113和固定块119均为三层结构(参照图1或图2),龙骨111中的滑动杆插装在固定块119的下层结构中,主滑块113下层结构上设有通孔,龙骨111中的滑动杆插入在主滑块113下层结构的通孔中,并为间隙配合,保证主滑块113可已在滑动杆上滑动,滑动杆的端面直径小于限位杆的端面直径,目的是通过限位杆与滑动杆之间形成的台阶对主滑块113进行限位。
具体实施方式四:参照图1、图2和图6说明本实施方式,本实施方式是对具体实施方式三所述的展翼结构作进一步限定,本实施方式中,所述展翼结构包括前缘杆112、导向滑块114、第一翼肋杆115、第二翼肋杆116、辅助三角架117和辅助杆118,所述前缘杆112的一端与固定块119的中部铰接,前缘杆112的另一端顶部铰接有导向滑块114,辅助杆118为折杆,辅助杆118中长杆末端设置在导向滑块114中,且辅助杆118中长杆与导向滑块114滑动连接,辅助杆118的折点处与第一翼肋杆115的一端铰接,辅助杆118的短杆末端与第二翼肋杆116的一端铰接,辅助三角架117的三个顶点处分别与主滑块113的上部、第一翼肋杆115中部和第二翼肋杆116的另一端铰接,第一翼肋杆115的另一端与固定块119的上部铰接,第一翼肋杆115中设有第一夹层,第一夹层的高度与辅助三角架117的厚度相同,第二翼肋杆116中设有第二夹层,第二夹层的高度与辅助杆118的厚度相同。其它组成及连接方式与具体实施方式三相同。
本实施方式中,第一翼肋杆115的一端与固定块119中的上层结构铰接,前缘杆112的一端与固定块119的中层结构铰接,辅助三角架117中的一个顶点与主滑块113的上层结构铰接,前缘杆112也为夹层结构,前缘杆112的夹层中沿前缘杆112的长度方向等距设有多个支撑立柱,保证前缘杆112刚性,辅助杆118中的长杆末端设有限位块,限位块设置在导向滑块114的外部,保证辅助杆118不会脱离导向滑块114。
具体实施方式五:参照图2和图3说明本实施方式,本实施方式是对具体实施方式四所述的展开驱动机构作进一步限定,本实施方式中,所述展开驱动机构包括滚珠丝杠121、展开步进电机122和减速齿轮机构123,所述滚珠丝杠121设置在滑动杆的上方,滚珠丝杠121的一端设置在固定块119上并与固定块119转动连接,主滑块113套设在滚珠丝杠121上,且主滑块113与滚珠丝杠121滑动连接,展开步进电机122通过电机支架固定在限位杆上,展开步进电机122的输出轴插装在减速齿轮机构123的输入端,滚珠丝杠121的另一端插装在减速齿轮机构123的输出端。其它组成及连接方式与具体实施方式四相同。
本实施方式中,滚珠丝杠121的一端设置在固定块119中的中层结构,并与固定块119之间设有轴承,滚珠丝杠121的一端与轴承的内圈固定连接,固定块119与轴承外圈固定连接,主滑块113的中层结构中加工有通孔,滚珠丝杠121设置在通孔中,在滚珠丝杠121和主滑块113之间设有轴承,主滑块113与轴承外圈固定连接,轴承内圈上加工有内螺纹,滚珠丝杠121与轴承内圈螺纹连接,所述减速齿轮机构123包括主动齿轮和减速齿轮,主动齿轮套装在展开步进电机122的输出轴上,减速齿轮套装在滚珠丝杠121的另一端上,且主动齿轮和减速齿轮齿啮合设置。
具体实施方式六:参照图8说明本实施方式,本实施方式是对具体实施方式五所述锁定机构作进一步限定,本实施方式中,所述锁定机构包括两个压缩弹簧131和插销132,所述滑动杆的底部加工有插销运动槽,插销运动槽的一端上设有一个定位槽,压缩弹簧131设置在主滑块113与滑动杆的接触处,每个压缩弹簧131的一端与主滑块113固定连接,每个压缩弹簧131的另一端与插销132底部固定连接,插销132上部设置在插销运动槽中。其它组成及连接方式与具体实施方式五相同。
本实施方式中,插销132负责锁紧,压缩弹簧131负责调解,定位槽对应在龙骨111的下止点,滑动杆和限位杆形成的台阶对应为龙骨111的下止点上,由于伞翼无人机中的伞翼仅有张开或收缩两个状态,定位槽对应伞翼在张开时,主滑块113在滑动杆中的位置,滑动杆和限位杆形成的台阶对应伞翼在收缩时,主滑块113在滑动杆中的位置,当插销132进入到定位槽时可以保证主滑块113不再发生移动,同时保证了伞翼处于张开状态下的稳定性。
具体实施方式七:参照图1、图2、图4和图5说明本实施方式,本实施方式是对具体实施方式六所述机身主体作进一步限定,所述机身主体包括仰角控制机构、横滚角控制机构、动力装置和可折叠起落架;
仰角控制机构包括推杆电机211和俯仰转接环212,所述推杆电机211的壳体与可折叠起落架的顶部铰接,推杆电机211的推杆端通过俯仰转接环212与龙骨111中的滑动杆相连,俯仰转接环212设置滑动杆靠近固定块119的一端处;
横滚角控制机构包括电控加热装置221和基于SMA弹簧驱动的舵机机构222,电控加热装置221通过固定架固接在可折叠起落架的顶部,基于SMA弹簧驱动的舵机机构222的输入端与电控加热装置221的输出端相连,基于SMA弹簧驱动的舵机机构222的输出端通过安装板及光轴止推环固定限位杆的末端;
动力装置包括发动机231和螺旋桨232,发动机231通过安装板固定在可折叠起落架的尾部,螺旋桨232套装在发动机231的输出轴上;
可折叠起落架包括机架241、前轮242、两个可伸缩前轮减震支柱243、两个后轮244、可伸缩后轮轮轴245、两个三角连接轴246和两个收展滑块247,所述两个可伸缩前轮减震支柱243相对设置,每个可伸缩前轮减震支柱243的顶端与机架241底部的前端固定连接,前轮242设置在两个可伸缩前轮减震支柱243之间,前轮242通过轮轴与两个可伸缩前轮减震支柱243转动连接,两个后轮244分别套设在可伸缩后轮轮轴245的一端上,且可伸缩后轮轮轴245通过两个三角连接轴246安装在机架241底部的后端上,每个三角连接轴246包括一个机身横滚连接轴和一个偏航平面连接轴,机身横滚连接轴的一端与机架241侧壁铰接,机身横滚连接轴的另一端与可伸缩后轮轮轴245的一端铰接,偏航平面连接轴的一端与可伸缩后轮轮轴245的一端固接,偏航平面连接轴的另一端通过一个收展滑块247与机架241侧壁滑动连接。其它组成及连接方式与具体实施方式六相同。
本实施方式中,通过电控加热装置221控制基于SMA弹簧驱动的舵机机构222中的SMA弹簧工作,经过基于SMA弹簧驱动的舵机机构222带动龙骨111转动,实现伞翼机横滚运动;通过控制推杆电机211工作,实现伞翼机俯仰运动;通过控制收展滑块247上下运动,实现伞翼无人机起落架的展开与折叠,发动机231作为本发明的主要动力源,用于对无人机提供飞行动力,电控加热装置221通过固定架固接在可折叠起落架的顶部,利用加热薄膜对其局部空间进行加热,继而实现对SMA弹簧的无接触式加热。基于SMA弹簧驱动的舵机机构222受两端的SMA弹簧收缩进行控制转向,并通过键连接的方式与龙骨进行连接,轴向采用光轴止推环进行固定。
具体实施方式八:参照图2说明本实施方式,本实施方式是对具体实施方式七所述机架241作进一步限定,所述推杆电机211的壳体与机架241的顶部铰接,电控加热装置221通过固定架固接在机架241的顶部,发动机231通过安装板固定在机架241的尾部。其它组成及连接方式与具体实施方式七相同。
具体实施方式九:参照图2说明本实施方式,本实施方式是对具体实施方式八所述控制系统作进一步限定,所述控制系统控制展开步进电机122、电控加热装置221和发动机231的启停。其它组成及连接方式与具体实施方式八相同。
工作原理:
本发明包括两种状态,其一为伞翼张开飞行状态,其二为伞翼收缩回收状态;
可折叠伞翼无人机处于展开状态,主滑块113运动至龙骨111下止点位置,压缩弹簧131将插销132顶入龙骨111所开的定位槽中,实现可折叠伞翼无人机翼面的锁定;第一翼肋杆115与第二翼肋杆116、辅助三角架117右侧杆件以及辅助杆118短杆部分处于共线状态,形成两根支撑翼面的完整翼肋,导向滑块114运动至辅助杆118长杆端点位置,前缘杆112在导向滑块114的带动下沿背离龙骨方向运动。翼面完全展开时,两辅助三角架处于同一高度位置;
可折叠伞翼无人机的折叠状态,主滑块113运动至龙骨111上止点位置,第一翼肋杆115与第二翼肋杆116、辅助三角架117右侧杆件以及辅助杆118组成一个平行四边形连杆机构。辅助杆118在辅助三角架117和平行四边形连杆机构的带动下绕其与第一翼肋杆115之间的转动副转动,同时导向滑块114沿辅助杆118滑动,带动前缘杆112向龙骨111方向收缩。折叠过程中辅助三脚架117相对于主滑块113做旋转运动,原本展开时处于同一高度位置的两辅助三角架将在螺旋传动的带动下相互错开,翼面实现折叠;
本发明的控制系统控制展开步进电机122工作,展开步进电机122转动后通过减速齿轮机构123控制滚珠丝杠121转动,主滑块113在滚珠丝杠121的带动下沿龙骨111直线方向运动,控制翼面展开与折叠;电控加热装置221通过固定架固接在可折叠起落架的顶部,利用加热薄膜对其局部空间进行加热,继而实现对SMA弹簧的无接触式加热。利用两端SMA弹簧的收缩力对SMA弹簧驱动的舵机机构222进行控制转向,继而通过键将转矩传递至龙骨,实现伞翼机横滚运动;通过控制推杆电机211工作,实现伞翼机俯仰运动;通过控制收展滑块247上下运动,实现伞翼无人机起落架的展开与折叠。
Claims (5)
1.一种基于SMA驱动的折叠式伞翼无人机,所述无人机包括收展组件、机身主体和控制系统,收展组件安装在机身主体上,控制系统控制收展机构和机身主体的工作;
所述收展组件包连杆机构、展开驱动机构和锁定机构,所述连杆机构安装在展开驱动机构上,锁定机构安装在连杆机构上,展开驱动机构安装在机身主体上;
所述连杆机构包括龙骨(111)、主滑块(113)、固定块(119)和两个展翼结构,所述主滑块(113)和固定块(119)结构相同,龙骨(111)包括滑动杆和限位杆,滑动杆的一端和限位杆一端一体设置,且滑动杆的端面直径小于限位杆的端面直径,滑动杆的一端插装在固定块(119)上,主滑块(113)套设在滑动杆上,且主滑块(113)与滑动杆滑动连接,两个展翼结构相对设置在龙骨(111)的两侧,且每个展翼结构的一端与主滑块(113)铰接,每个展翼结构的另一端与固定块(119)铰接
其特征在于:所述展翼结构包括前缘杆(112)、导向滑块(114)、第一翼肋杆(115)、第二翼肋杆(116)、辅助三角架(117)和辅助杆(118),所述前缘杆(112)的一端与固定块(119)的中部铰接,前缘杆(112)的另一端顶部铰接有导向滑块(114),辅助杆(118)为折杆,辅助杆(118)中长杆末端设置在导向滑块(114)中,且辅助杆(118)中长杆与导向滑块(114)滑动连接,辅助杆(118)的折点处与第一翼肋杆(115)的一端铰接,辅助杆(118)的短杆末端与第二翼肋杆(116)的一端铰接,辅助三角架(117)的三个顶点处分别与主滑块(113)的上部、第一翼肋杆(115)中部和第二翼肋杆(116)的另一端铰接,第一翼肋杆(115)的另一端与固定块(119)的上部铰接,第一翼肋杆(115)中设有第一夹层,第一夹层的高度与辅助三角架(117)的厚度相同,第二翼肋杆(116)中设有第二夹层,第二夹层的高度与辅助杆(118)的厚度相同;
所述机身主体包括仰角控制机构、横滚角控制机构、动力装置和可折叠起落架;
仰角控制机构包括推杆电机(211)和俯仰转接环(212),所述推杆电机(211)的壳体与可折叠起落架的顶部铰接,推杆电机(211)的推杆端通过俯仰转接环(212)与龙骨(111)中的滑动杆相连,俯仰转接环(212)设置滑动杆靠近固定块(119)的一端处;
横滚角控制机构包括电控加热装置(221)和基于SMA弹簧驱动的舵机机构(222),电控加热装置(221)通过固定架固接在可折叠起落架的顶部,基于SMA弹簧驱动的舵机机构(222)的输入端与电控加热装置(221)的输出端相连,基于SMA弹簧驱动的舵机机构(222)的输出端通过安装板及光轴止推环固定限位杆的末端;
动力装置包括发动机(231)和螺旋桨(232),发动机(231)通过安装板固定在可折叠起落架的尾部,螺旋桨(232)套装在发动机(231)的输出轴上;
可折叠起落架包括机架(241)、前轮(242)、两个可伸缩前轮减震支柱(243)、两个后轮(244)、可伸缩后轮轮轴(245)、两个三角连接轴(246)和两个收展滑块(247),所述两个可伸缩前轮减震支柱(243)相对设置,每个可伸缩前轮减震支柱(243)的顶端与机架(241)底部的前端固定连接,前轮(242)设置在两个可伸缩前轮减震支柱(243)之间,前轮(242)通过轮轴与两个可伸缩前轮减震支柱(243)转动连接,两个后轮(244)分别套设在可伸缩后轮轮轴(245)的一端上,且可伸缩后轮轮轴(245)通过两个三角连接轴(246)安装在机架(241)底部的后端上,每个三角连接轴(246)包括一个机身横滚连接轴和一个偏航平面连接轴,机身横滚连接轴的一端与机架(241)侧壁铰接,机身横滚连接轴的另一端与可伸缩后轮轮轴(245)的一端铰接,偏航平面连接轴的一端与可伸缩后轮轮轴(245)的一端固接,偏航平面连接轴的另一端通过一个收展滑块(247)与机架(241)侧壁滑动连接。
2.根据权利要求1中所述的一种基于SMA驱动的折叠式伞翼无人机,其特征在于:所述展开驱动机构包括滚珠丝杠(121)、展开步进电机(122)和减速齿轮机构(123),所述滚珠丝杠(121)设置在滑动杆的上方,滚珠丝杠(121)的一端设置在固定块(119)上并与固定块(119)转动连接,主滑块(113)套设在滚珠丝杠(121)上,且主滑块(113)与滚珠丝杠(121)滑动连接,展开步进电机(122)通过电机支架固定在限位杆上,展开步进电机(122)的输出轴插装在减速齿轮机构(123)的输入端,滚珠丝杠(121)的另一端插装在减速齿轮机构(123)的输出端。
3.根据权利要求2中所述的一种基于SMA驱动的折叠式伞翼无人机,其特征在于:所述锁定机构包括两个压缩弹簧(131)和插销(132),所述滑动杆的底部加工有插销运动槽,插销运动槽的一端上设有一个定位槽,压缩弹簧(131)设置在主滑块(113)与滑动杆的接触处,每个压缩弹簧(131)的一端与主滑块(113)固定连接,每个压缩弹簧(131)的另一端与插销(132)底部固定连接,插销(132)上部设置在插销运动槽中。
4.根据权利要求3中所述的一种基于SMA驱动的折叠式伞翼无人机,其特征在于:所述推杆电机(211)的壳体与机架(241)的顶部铰接,电控加热装置(221)通过固定架固接在机架(241)的顶部,发动机(231)通过安装板固定在机架(241)的尾部。
5.根据权利要求4中所述的一种基于SMA驱动的折叠式伞翼无人机,其特征在于:所述控制系统控制展开步进电机(122)、电控加热装置(221)和发动机(231)的启停。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010694239.9A CN111792020B (zh) | 2020-07-17 | 2020-07-17 | 一种基于sma驱动的折叠式伞翼无人机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010694239.9A CN111792020B (zh) | 2020-07-17 | 2020-07-17 | 一种基于sma驱动的折叠式伞翼无人机 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111792020A CN111792020A (zh) | 2020-10-20 |
| CN111792020B true CN111792020B (zh) | 2022-07-08 |
Family
ID=72807739
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010694239.9A Active CN111792020B (zh) | 2020-07-17 | 2020-07-17 | 一种基于sma驱动的折叠式伞翼无人机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111792020B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11905022B2 (en) * | 2021-03-24 | 2024-02-20 | Schain Lolatchy | Helicopter flight support |
| CN114248906B (zh) * | 2021-11-14 | 2022-06-21 | 北京工业大学 | 一种飞行器机翼折叠装置 |
| CN114084323A (zh) * | 2021-12-16 | 2022-02-25 | 上海交通大学 | 可折展微型水下机器人及其工作方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105314092A (zh) * | 2014-07-16 | 2016-02-10 | 波音公司 | 使用形状记忆合金的适应性复合结构体 |
| CN109922945A (zh) * | 2016-11-03 | 2019-06-21 | Cc3D有限公司 | 复合载具本体 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6283409B1 (en) * | 1999-10-18 | 2001-09-04 | Usbi Co. | Sail closure mechanism for cross bar access deployable wing |
| US8628040B2 (en) * | 2006-01-30 | 2014-01-14 | The Boeing Company | Aircraft configuration |
| US7878459B2 (en) * | 2007-06-29 | 2011-02-01 | The Boeing Company | Aircraft systems with shape memory alloy (SMA) actuators, and associated methods |
| US9132915B2 (en) * | 2010-05-07 | 2015-09-15 | Ohio Univeristy | Multi-modal vehicle |
| US9598167B2 (en) * | 2014-03-04 | 2017-03-21 | The Boeing Company | Morphing airfoil leading edge |
| US10252792B2 (en) * | 2015-04-21 | 2019-04-09 | The United States Of America As Represented By The Administrator Of Nasa | Flow disruption devices for the reduction of high lift system noise |
| CN109353496B (zh) * | 2018-07-04 | 2022-05-31 | 哈尔滨工业大学(威海) | 一种展开式三角翼飞行装置 |
| CN109572995B (zh) * | 2018-11-19 | 2021-11-05 | 南京航空航天大学 | 双程形状记忆合金和液压复合驱动的可变翼型机翼前缘 |
-
2020
- 2020-07-17 CN CN202010694239.9A patent/CN111792020B/zh active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105314092A (zh) * | 2014-07-16 | 2016-02-10 | 波音公司 | 使用形状记忆合金的适应性复合结构体 |
| CN109922945A (zh) * | 2016-11-03 | 2019-06-21 | Cc3D有限公司 | 复合载具本体 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111792020A (zh) | 2020-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111792020B (zh) | 一种基于sma驱动的折叠式伞翼无人机 | |
| CN109018349B (zh) | 一种适用于高速飞行条件下稳定投放的多旋翼无人机系统 | |
| EP3632793B1 (en) | Unmanned aerial vehicle and landing gear thereof | |
| WO2018098993A1 (zh) | 一种螺旋桨双轴矢量伺服变向装置及垂直起降固定翼无人机 | |
| US8752785B2 (en) | Semi-levered articulated landing gear system | |
| CN104743110A (zh) | 一种折叠式空投无人机 | |
| US20150274280A1 (en) | Air vehicle, actuator assembly and associated method of manufacture | |
| CN109050906B (zh) | 共轴双旋翼推力矢量无人机 | |
| CN102602529A (zh) | 折叠式全动平尾机构 | |
| CN112520014B (zh) | 一种折叠控制一体化无人机 | |
| CN116119052A (zh) | 一种机翼可折叠的固定翼无人机 | |
| CN109896002B (zh) | 一种可变形的四旋翼飞行器 | |
| CN209972084U (zh) | 可折叠水陆空三栖四旋翼飞行器 | |
| CN109533310B (zh) | 一种机动发射可折叠式微型共轴双旋翼悬浮装置 | |
| CN105366035A (zh) | 用于阻止飞行操纵面的装置和方法 | |
| US20230211902A1 (en) | Deployable wing system for air vehicle | |
| CN219008166U (zh) | 无人机轮式起落架及无人机 | |
| EP3736213B1 (en) | Hybrid unmanned aerial vehicle | |
| CN115320843B (zh) | 水空双动力倾转旋翼跨介质无人机 | |
| CN115056966B (zh) | Z型折叠翼无人飞行器机翼折叠构架及其工作方法 | |
| CN107719665B (zh) | 扑翼飞行器的机翼及扑翼飞行器 | |
| CN217456332U (zh) | 一种变形机翼装置、机翼及飞行设备 | |
| CN211810219U (zh) | 一种飞行器 | |
| CN112124589B (zh) | 一种二旋翼矢量倾转无人机 | |
| CN113716024A (zh) | 一种便于展开调节的无人机起落架 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |