CN111670341B - 驱动器、扫描模组及激光测量装置 - Google Patents
驱动器、扫描模组及激光测量装置 Download PDFInfo
- Publication number
- CN111670341B CN111670341B CN201980005729.9A CN201980005729A CN111670341B CN 111670341 B CN111670341 B CN 111670341B CN 201980005729 A CN201980005729 A CN 201980005729A CN 111670341 B CN111670341 B CN 111670341B
- Authority
- CN
- China
- Prior art keywords
- assembly
- wall
- ring
- magnet
- rotor assembly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000004804 winding Methods 0.000 claims description 27
- 230000005540 biological transmission Effects 0.000 claims description 17
- 230000008859 change Effects 0.000 claims description 17
- 238000009413 insulation Methods 0.000 claims description 12
- 238000009434 installation Methods 0.000 claims description 11
- 230000005389 magnetism Effects 0.000 claims description 9
- 238000001514 detection method Methods 0.000 claims description 4
- 230000000149 penetrating effect Effects 0.000 claims description 2
- 238000002955 isolation Methods 0.000 claims 19
- 230000002452 interceptive effect Effects 0.000 claims 5
- 230000004907 flux Effects 0.000 claims 4
- 230000004888 barrier function Effects 0.000 claims 3
- 230000007717 exclusion Effects 0.000 claims 2
- 230000003287 optical effect Effects 0.000 description 16
- 238000005070 sampling Methods 0.000 description 9
- 238000005299 abrasion Methods 0.000 description 8
- 229910052751 metal Inorganic materials 0.000 description 8
- 239000002184 metal Substances 0.000 description 8
- 230000002035 prolonged effect Effects 0.000 description 8
- 239000003990 capacitor Substances 0.000 description 6
- 239000000428 dust Substances 0.000 description 6
- 239000000463 material Substances 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- 239000000523 sample Substances 0.000 description 6
- 239000000314 lubricant Substances 0.000 description 5
- 238000005259 measurement Methods 0.000 description 5
- 239000004020 conductor Substances 0.000 description 4
- 238000005260 corrosion Methods 0.000 description 4
- 230000007797 corrosion Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 3
- 230000000452 restraining effect Effects 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000000691 measurement method Methods 0.000 description 2
- 230000035699 permeability Effects 0.000 description 2
- 230000010363 phase shift Effects 0.000 description 2
- 239000010965 430 stainless steel Substances 0.000 description 1
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 239000006117 anti-reflective coating Substances 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000004519 grease Substances 0.000 description 1
- 239000011810 insulating material Substances 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 230000002045 lasting effect Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000001208 nuclear magnetic resonance pulse sequence Methods 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/02—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using mechanical means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
Abstract
一种激光测量装置(300)、扫描模组(200)及驱动器(100)。驱动器(100)包括定子组件(10)、转子组件(20)、支撑组件(30)、磁体(40)及能够导磁的码盘(50),转子组件(20)穿设在定子组件(10)内,定子组件(10)用于驱动转子组件(20)绕转子组件(20)的转轴(OO1)转动;支撑组件(30)套设于转子组件(20)上并径向抵持于定子组件(10);磁体(40)沿转轴(OO1)的方向套设于转子组件(20)外的一侧;码盘(50)套设于转子组件(20)外并在转轴(OO1)的方向上位于支撑组件(30)及磁体(40)之间。
Description
技术领域
本申请涉及驱动器技术领域,特别涉及一种驱动器、扫描模组及激光测量装置。
背景技术
驱动器一般包括定子组件、安装在定子组件内的转子组件、以及安装在定子组件与转子组件之间的轴承,定子组件用于驱动转子组件转动,轴承用于限制转子组件以使转子组件绕转轴转动。由于轴承内部存在间隙,当转子组件在转动时,转子组件容易产生晃动。现有解决转子组件在转动时产生晃动的方法是通过强磁铁给轴承施加预紧力,然而,轴承中的铁屑在强磁铁的作用下会聚集到轴承的滚道上,加剧了轴承在转到时受到的磨损,并导致轴承的使用寿命较低。
发明内容
本申请的实施方式需要提供一种驱动器、扫描模组及激光测量装置。
本申请的驱动器包括定子组件、转子组件、支撑组件、磁体及能够导磁的码盘,所述转子组件穿设在所述定子组件内,所述定子组件用于驱动所述转子组件绕所述转子组件的转轴转动;所述支撑组件套设于所述转子组件上并径向抵持于所述定子组件;所述磁体沿所述转轴的方向套设于所述转子组件外的一侧;所述码盘套设于所述转子组件外并在所述转轴的方向上位于所述支撑组件及所述磁体之间。
本申请的扫描模组包括驱动器及棱镜,所述驱动器包括定子组件、转子组件、支撑组件、磁体及能够导磁的码盘,所述转子组件穿设在所述定子组件内,所述定子组件用于驱动所述转子组件绕所述转子组件的转轴转动,所述支撑组件套设于所述转子组件上并径向抵持于所述定子组件,所述磁体沿所述转轴的方向套设于所述转子组件外的一侧,所述码盘套设于所述转子组件外并在所述转轴的方向上位于所述支撑组件及所述磁体之间;所述棱镜安装在所述转子组件内,所述驱动器用于驱动所述棱镜转动以改变经过所述棱镜的激光脉冲的传输方向。
本申请的激光测量装置包括光线收发模组及扫描模组,所述光线收发模组用于发射激光脉冲及接收经探测物反射回的激光脉冲;所述扫描模组包括驱动器及棱镜,所述驱动器包括定子组件、转子组件、支撑组件、磁体及能够导磁的码盘,所述转子组件穿设在所述定子组件内,所述定子组件用于驱动所述转子组件绕所述转子组件的转轴转动,所述支撑组件套设于所述转子组件上并径向抵持于所述定子组件,所述磁体沿所述转轴的方向套设于所述转子组件外的一侧,所述码盘套设于所述转子组件外并在所述转轴的方向上位于所述支撑组件及所述磁体之间;所述棱镜安装在所述转子组件内;所述扫描模组设置在所述光线收发模组的出光光路上,所述驱动器用于驱动所述棱镜转动以改变经过所述棱镜的所述激光脉冲的传输方向。
本申请的激光测量装置、扫描模组及驱动器通过将码盘设置为导磁体,从而减小了磁体在支撑组件处形成的磁场的强度,避免了支撑组件上产生的金属磨屑聚集到支撑组件的内部,进而减小了支撑组件在转动时受到的磨损,提升了支撑组件的使用寿命。
本申请的驱动器包括定子组件、转子组件、支撑组件及绝缘环。所述转子组件穿设在所述定子组件内并与所述定子组件间隔设置,所述定子组件用于驱动所述转子组件绕所述转子组件的转轴转动;所述支撑组件套设于所述转子组件上并位于所述转子组件与所述定子组件之间;所述绝缘环套设于所述支撑组件外并位于所述支撑组件与所述定子组件之间。
本申请的扫描模组包括驱动器及棱镜,所述驱动器包括定子组件、转子组件、支撑组件及绝缘环,所述转子组件穿设在所述定子组件内并与所述定子组件间隔设置,所述定子组件用于驱动所述转子组件绕所述转子组件的转轴转动;所述支撑组件套设于所述转子组件上并位于所述转子组件与所述定子组件之间;所述绝缘环套设于所述支撑组件外并位于所述支撑组件与所述定子组件之间;所述棱镜安装在所述转子组件内,所述驱动器用于驱动所述棱镜转动以改变经过所述棱镜的激光脉冲的传输方向。
本申请的激光测量装置包括光线收发模组及扫描模组,所述光线收发模组用于发射激光脉冲及接收经探测物反射回的激光脉冲;所述扫描模组包括驱动器及棱镜;所述驱动器包括定子组件、转子组件、支撑组件及绝缘环,所述转子组件穿设在所述定子组件内并与所述定子组件间隔设置,所述定子组件用于驱动所述转子组件绕所述转子组件的转轴转动;所述支撑组件套设于所述转子组件上并位于所述转子组件与所述定子组件之间;所述绝缘环套设于所述支撑组件外并位于所述支撑组件与所述定子组件之间;所述棱镜安装在所述转子组件内;所述扫描模组设置在所述光线收发模组的出光光路上,所述驱动器用于驱动所述棱镜转动以改变经过所述棱镜的所述激光脉冲的传输方向。
本申请的激光测量装置、扫描模组及驱动器通过在定子组件与支撑组件之间设置绝缘环,绝缘环隔绝了定子组件与支撑组件之间的电性连接,从而避免了定子组件、转子组件与支撑组件共同形成闭环的电路,进而避免支撑组件在转动时受到电腐蚀,提升了支撑组件的使用寿命。
本申请的实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实施方式的实践了解到。
附图说明
本申请的上述和/或附加的方面和优点从结合下面附图对实施方式的描述中将变得明显和容易理解,其中:
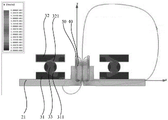
图1是本申请实施方式的激光测量装置的立体结构示意图。
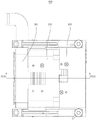
图2和是图1中激光测量装置沿II-II线的剖面示意图。
图3是现有的驱动器的磁场分布示意图。
图4是本申请实施方式的驱动器的磁场分布示意图。
图5是图1中激光测量装置沿II-II线的剖面示意图。
图6是本申请另一实施方式的驱动器的磁场分布示意图。
图7是本申请另一实施方式的激光测量装置的立体结构示意图。
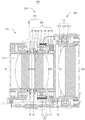
图8是图7中激光测量装置沿VIII-VIII线的剖面示意图。
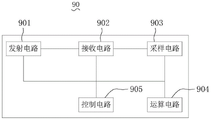
图9是本申请实施方式的激光测量装置的光线收发模组的模块示意图。
图10是本申请实施方式的激光测量装置的测距原理示意图。
图11是图7中激光测量装置沿VIII-VIII线的剖面示意图。
具体实施方式
下面详细描述本申请的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本申请,而不能理解为对本申请的限制。
在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本申请的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本申请中的具体含义。
在本申请中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
下文的公开提供了许多不同的实施方式或例子用来实现本申请的不同结构。为了简化本申请的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本申请。此外,本申请可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本申请提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
请参与图1及图2,本申请的驱动器100包括定子组件10、转子组件20、支撑组件30、磁体40及能够导磁的码盘50。转子组件20穿设在定子组件10内,定子组件10用于驱动转子组件20绕转子组件20的转轴OO1转动。支撑组件30套设于转子组件20上并径向抵持于定子组件10。磁体40沿转轴OO1的方向套设于转子组件20外的一侧。码盘50套设于转子组件20外并在转轴OO1的方向上位于支撑组件30及磁体40之间。具体地,转子组件20开设有收容通孔214,收容通孔214可用于安装待驱动元件(例如棱镜80)。
由图3可以看出,当码盘50不导磁时,支撑组件30的内圈滚道311和外圈滚道321处的磁场强度的最大值为0.1特斯拉(tesla)。由图4可以看出,当码盘50导磁时,也即是当码盘50为导磁体,支撑组件30的内圈滚道311和外圈滚道321处的磁场强度的最大值为0.0167特斯拉。其中,内圈滚道311为内圈31上的与滚珠33相结合的沟槽,外圈滚道321为外圈32上的与滚珠33相结合的沟槽。
本实施方式的驱动器100通过将码盘50设置为导磁体,从而减小了磁体40在支撑组件30处形成的磁场的强度,避免了支撑组件30上产生的金属磨屑聚集到支撑组件30的内部,进而减小了支撑组件30在转动时受到的磨损,提升了支撑组件30的使用寿命。
请参阅图8,本申请另一实施方式的驱动器100包括定子组件10、转子组件20、支撑组件30及绝缘环70。转子组件20穿设在定子组件10内并与定子组件10间隔设置,定子组件10用于驱动转子组件20绕转子组件20的转轴OO1转动。支撑组件30套设于转子组件20上并位于转子组件20与定子组件10之间。绝缘环70套设于支撑组件30外并位于支撑组件30与定子组件10之间。具体地,转子组件20开设有收容通孔214,收容通孔214可用于安装待驱动元件(例如棱镜80)。
现有的驱动器100中,支撑组件30与定子组件10之间一般不设置绝缘环70,由于定子组件10与转子组件20之间存在间隙,支撑组件30的内部存在间隙,并且支撑组件30内的间隙填充有润滑剂(包括润滑油及润滑脂),因而定子组件10与转子组件20之间会形成等效电容并定义为第一等效电容,支撑组件30会形成两个等效电容并分别定义为第二等效电容及第三等效电容,则转子组件20产生的感应电动势与第一等效电容、第二等效电容及第三等效电容共同形成一个闭环的等效电路。当支撑组件30转动时,支撑组件30内的间隙会发生变化并导致第二等效电容或第三等效电容发生放电现象,从而导致支撑组件30会受到电腐蚀而影响支撑组件30的使用寿命。
转子组件20安装在定子组件10内一般会存在偏心问题,当转子组件20相对定子组件10转动时,由于转子组件20处于交变磁场中,因而转子组件20会产生交变的感应电动势。若支撑组件30与定子组件10之间不设置绝缘环70,由于定子组件10与转子组件20之间存在间隙,支撑组件30的内部也存在间隙,并且支撑组件30内的间隙填充有润滑剂,因而每个驱动器100中的定子组件10与转子组件20之间会形成等效电容并定义为第一等效电容,每个驱动器100中的支撑组件30会形成两个等效电容并分别定义为第二等效电容及第三等效电容,则转子组件20产生的感应电动势与第一等效电容、第二等效电容及第三等效电容共同形成一个闭环的等效电路。当支撑组件30转动时,支撑组件30内的间隙会发生变化并导致第二等效电容或第三等效电容发生放电现象,从而导致支撑组件30会受到电腐蚀而影响支撑组件30的使用寿命。
本实施方式的驱动器100通过在定子组件10与支撑组件30之间设置绝缘环70,绝缘环70隔绝了定子组件10与支撑组件30之间的电性连接,从而避免了定子组件10、转子组件20与支撑组件30共同形成闭环的电路,进而避免支撑组件30在转动时受到电腐蚀,提升了支撑组件30的使用寿命。
请参阅图2,本申请的扫描模组200包括上述任意一实施方式的驱动器100及棱镜80,棱镜80安装在转子组件20内,驱动器100用于驱动棱镜80转动以改变经过棱镜80的激光脉冲的传输方向。具体地,棱镜80安装在收容通孔214内。
请参阅图2,本申请激光测量装置300包括光线收发模组90和上述任意一实施方式的扫描模组200,光线收发模组90用于发射激光脉冲及接收经探测物反射回的激光脉冲,扫描模组200设置在光线收发模组90的出光光路上,扫描模组200用于改变经过棱镜80的激光脉冲的传输方向。
本申请实施方式的激光测量装置300及扫描模组200中的驱动器100通过将码盘50设置为导磁体,从而减小了磁体40在支撑组件30处形成的磁场的强度,避免了支撑组件30上产生的金属磨屑聚集到支撑组件30的内部,进而减小了支撑组件30在转动时受到的磨损,提升了支撑组件30的使用寿命。或者,本申请实施方式的激光测量装置300及扫描模组200中的驱动器100通过在定子组件10与支撑组件30之间设置绝缘环70,绝缘环70隔绝了定子组件10与支撑组件30之间的电性连接,从而避免了定子组件10、转子组件20与支撑组件30共同形成闭环的电路,进而避免支撑组件30在转动时受到电腐蚀,提升了支撑组件30的使用寿命。
请参阅图2,本申请的驱动器100包括定子组件10、转子组件20、支撑组件30、环形的磁体40及能够导磁的码盘50。
定子组件10包括外壳11及绕组12,外壳11包括中空的外壁111环形限位壁112,限位壁112自外壁111的内表面延伸。外壁111围成有容置空间113,限位壁112位于容置空间113内并将容置空间113分隔成相连通的安装空间114及收容空间115。绕组12安装在收容空间115内并固定在外壳11的内壁上。
转子组件20穿设在外壳11及绕组12内,定子组件10用于驱动转子组件20绕转子组件20的转轴OO1转动。转子组件20包括磁轭21及环形的磁铁22。磁轭21包括环形的本体211及环形的安装壁212。环形的本体211的内部形成有收容通孔214。安装壁212自本体211的外表面延伸形成,安装壁212位于本体211的远离绕组12的一端。安装壁212包括相连接的环状的安装部2121及环状的抵持部2122,安装部2121与抵持部2122沿转轴OO1的轴向分布,抵持部2122的外径小于安装部2121的外径。磁铁22套设于本体211的远离安装壁212的一端并收容在收容空间115内,磁铁22与绕组12相对并相间隔。
支撑组件30套设于本体211外并位于本体211的靠近安装壁212的一端,支撑组件30和磁铁22位于安装壁212的同一侧。支撑组件30包括轴承30。轴承30包括内圈31、外圈32和滚珠33。内圈31套设于本体211外并能够跟随本体211转动,内圈31的一端与抵持部2122抵触。外圈32固定在外壁111内并相对外壁111固定,外圈32套设于内圈31外,外圈32的远离安装壁212的一端与限位壁112抵持。内圈31的外壁形成有内圈滚道311,外圈32的内壁形成有外圈滚道321并与内圈滚道311相对。滚珠33位于内圈31与外圈32之间,滚珠33能够在内圈滚道311及外圈滚道321内滚动。滚珠33的数量为多个,多个滚珠33环绕内圈31设置,多个滚珠33共同限定磁轭21绕转轴OO1转动。
磁体40套设于本体211外并位于安装壁212的远离支撑组件30的一侧。磁体40可以为永磁体。
码盘50套设于本体211外并位于安装壁212与磁体40之间。具体地,码盘50固定在安装部2121及本体211上。码盘50由导磁材料制成,导磁材料包括430不锈钢。码盘50的厚度为0.4mm。码盘50一般配合光开关(图未示)使用并共同用于检测磁轭21的转动参数,转动参数包括转动角度、转速、转动加速度等。
由图3可以看出,当码盘50不导磁时,支撑组件30的内圈滚道311和外圈滚道321处的磁场强度的最大值为0.1特斯拉(tesla)。由图4可以看出,当码盘50导磁时,也即是当码盘50为导磁体,支撑组件30的内圈滚道311和外圈滚道321处的磁场强度的最大值为0.0167特斯拉。
本实施方式的驱动器100通过将码盘50设置为导磁体,从而减小了磁体40在支撑组件30的内圈滚道311和外圈滚道321处产生的磁场强度,减少了支撑组件30内的金属磨屑聚集到内圈滚道311及外圈滚道321上,进而减小了滚珠33在内圈滚道311及外圈滚道321内滚道时滚珠33、内圈滚道311及外圈滚道321受到的磨损,提升了支撑组件30的使用寿命。
请参阅图2,在某些实施方式中,磁轭21包括环形的本体211、环形的安装壁212及环形的定位壁213。安装壁212自本体211的外表面延伸形成,安装壁212位于本体211的远离绕组12的一端,具体地,安装壁212位于支撑组件30与码盘50之间。定位壁213自本体211的外表面延伸并位于安装壁212与支撑组件30之间,定位壁213在转轴OO1的方向上与安装壁212相间隔,定位壁213与内圈31的远离磁铁22的一端相抵触。此时,安装壁212可以仅包括安装部2121而不包括抵持部2122。
由于定位壁213与安装壁212在转轴OO1的方向上间隔,并且空气的导磁系数较小,因而,本实施方式的驱动器100相当于在定位壁213与安装壁212之间设置了隔磁环(如图5所示)。由图6可以看出,当码盘50导磁并且支撑组件30和安装壁212之间间隔空气(或设置有隔磁环60)时,支撑组件30的内圈滚道311和外圈滚道321处的磁场强度的最大值为0.0133特斯拉。本实施方式的驱动器100通过将码盘50设置为导磁体,并且在支撑组件30和安装壁212之间间隔空气,从而减小了磁体40在支撑组件30的内圈滚道311和外圈滚道321处产生的磁场强度,减少了支撑组件30内的金属磨屑聚集到内圈滚道311及外圈滚道321上,进而减小了滚珠33在内圈滚道311及外圈滚道321内滚道时滚珠33、内圈滚道311及外圈滚道321受到的磨损,提升了支撑组件30的使用寿命。
请参阅图5,在某些实施方式中,驱动器100还包括隔磁环60,隔磁环60套设于本体211外并位于支撑组件30与安装壁212之间,隔磁环60的相对两端分别与内圈31及安装壁212抵触。此时,安装壁212可以仅包括安装部2121而不包括抵持部2122。隔磁环60由导磁系数较低的材料制成,例如,隔磁环60可以由铝合金材料制成。
由图6可以看出,当码盘50导磁并且支撑组件30和安装壁212之间设置有隔磁环60时,支撑组件30的内圈滚道311和外圈滚道321处的磁场强度的最大值为0.0133特斯拉。本实施方式的驱动器100通过将码盘50设置为导磁体,并且在支撑组件30和安装壁212之间设置隔磁环60,从而减小了磁体40在支撑组件30的内圈滚道311和外圈滚道321处产生的磁场强度,减少了支撑组件30内的金属磨屑聚集到内圈滚道311及外圈滚道321上,进而减小了滚珠33在内圈滚道311及外圈滚道321内滚道时滚珠33、内圈滚道311及外圈滚道321受到的磨损,提升了支撑组件30的使用寿命。
请参阅图7及图8,在某些实施方式中,驱动器100还包括绝缘环70,绝缘环70套设于支撑组件30外并位于支撑组件30与定子组件10之间。具体地,绝缘环70包括环形侧壁71及环形端壁72,端壁72自侧壁71的一端朝侧壁71的中心延伸。绝缘环70设置在安装空间114内并固定在外壁111上,端壁72与限位壁112抵持,外圈32设置在绝缘环70内,外圈70的远离绝缘环70的一端与限位壁112抵持。绝缘环70由绝缘材料制成。一般地,磁轭21、磁铁22、绕组12、外壳11、外圈32、滚珠33、内圈31均能够导电。
转子组件20安装在定子组件10内一般会存在偏心问题,当转子组件20相对定子组件10转动时,由于转子组件20处于交变磁场中,因而转子组件20会产生交变的感应电动势。若支撑组件30与定子组件10之间不设置绝缘环70,由于磁铁22与绕组12之间存在间隙,外圈滚道321与滚珠33之间存在间隙,内圈滚道311与滚珠33之间也存在间隙,外圈滚道321与滚珠33之间的间隙填充有润滑剂,内圈滚道311与滚珠33之间的间隙也填充有润滑剂,因而磁铁22与绕组12会形成等效电容并定义为第一等效电容,外圈32与滚珠33会形成等效电容并定义为第二等效电容,内圈31与滚珠33会形成等效电容并定义为第三等效电容,则转子组件20产生的感应电动势与第一等效电容、第二等效电容及第三等效电容共同形成一个闭环的等效电路。当支撑组件30转动时,支撑组件30内的间隙会发生变化并导致第二等效电容或第三等效电容发生放电现象,从而导致内圈滚道311及外圈滚道321会受到电腐蚀而影响支撑组件30的使用寿命。
本实施方式的驱动器100通过在外壁111与外圈32之间设置绝缘环70,绝缘环70使外壁111与外圈32分离并隔绝了外壁111与外圈32之间的电性连接,从而避免了定子组件10、转子组件20与支撑组件30共同形成闭环的电路,进而避免支撑组件30在转动时受到电腐蚀,提升了支撑组件30的使用寿命。
请参阅图8,本申请的扫描模组200包括上述实施方式的驱动器100及棱镜80,棱镜80安装在转子组件20内,驱动器100用于驱动棱镜80转动以改变经过棱镜80的激光脉冲的传输方向。本实施方式的棱镜80为楔形体,具体地,棱镜80近似呈圆柱体状,棱镜80的底面与棱镜80的轴线相垂直,棱镜80的顶面与棱镜80的轴线相对倾斜,棱镜80的厚度不均匀。棱镜80安装在收容通孔214内。棱镜80的轴线与转轴OO1平行,驱动器100用于驱动棱镜80绕转轴OO1转动。当光线穿过棱镜80的顶面时,光线会发生折射并改变光线的传输方向。
本申请的扫描模组200中的驱动器100通过将码盘50设置为导磁体,从而减小了磁体40在支撑组件30的内圈滚道311和外圈滚道321处产生的磁场强度,减少了支撑组件30内的金属磨屑聚集到内圈滚道311及外圈滚道321上,进而减小了滚珠33在内圈滚道311及外圈滚道321内滚道时滚珠33、内圈滚道311及外圈滚道321受到的磨损,提升了支撑组件30的使用寿命。同时,扫描模组200中的驱动器100通过在外壁111与外圈32之间设置绝缘环70,绝缘环70使外壁111与外圈32分离并隔绝了外壁111与外圈32之间的电性连接,从而避免了定子组件10、转子组件20与支撑组件30共同形成闭环的电路,进而避免支撑组件30在转动时受到电腐蚀,提升了支撑组件30的使用寿命。
请参阅图8至图10,本申请的激光测量装置300包括光线收发模组90及上述实施方式的扫描模组200。光线收发模组90用于发射激光脉冲及接收经探测物反射回的激光脉冲。扫描模组200设置在光线收发模组90的出光光路上,扫描模组200用于改变经过棱镜80的激光脉冲的传输方向。
光线收发模组90用于向扫描模组200发射激光脉冲,扫描模组200用于改变激光脉冲的传输方向后出射,经探测物反射回的激光脉冲经过扫描模组200后入射至光线收发模组,光线收发模组90用于根据反射回的激光脉冲确定探测物与激光测量装置300之间的距离。
本申请实施方式提供一种光线收发模组90,该光线收发模组90可以用来确定探测物相对光线收发模组90的距离和/或方向。该光线收发模组90可以是激光雷达、激光测距设备等电子设备。在一种实施方式中,光线收发模组90可用于感测外部环境信息,例如,环境目标的距离信息、方位信息、反射强度信息、速度信息等。一种实现方式中,光线收发模组90可以通过测量光线收发模组90和探测物之间光传播的时间,即光飞行时间(Time-of-Flight,TOF),来探测探测物到光线收发模组90的距离。或者,光线收发模组90也可以通过其他技术来探测探测物到光线收发模组90的距离,例如基于相位移动(phase shift)测量的测距方法,或者基于频率移动(frequency shift)测量的测距方法,在此不做限制。光线收发模组90探测到距离和方位可以用于遥感、避障、测绘、建模、导航等。
为了便于理解,以下将结合图9所示的光线收发模组90对测距的工作流程进行举例描述。如图9所示,光线收发模组90可以包括发射电路901、接收电路902、采样电路903和运算电路904。
发射电路901可以发射光脉冲序列(例如激光脉冲序列)。接收电路902可以接收经过被探测物反射的光脉冲序列,并对该光脉冲序列进行光电转换,以得到电信号,再对电信号进行处理之后可以输出给采样电路903。采样电路903可以对电信号进行采样,以获取采样结果。运算电路904可以基于采样电路903的采样结果,以确定被探测物与光线收发模组90之间的距离。
可选地,该光线收发模组90还可以包控制电路905,该控制电路905可以实现对其他电路的控制,例如,可以控制各个电路的工作时间和/或对各个电路进行参数设置等。
应理解,虽然图9示出的光线收发模组90中包括一个发射电路901、一个接收电路902、一个采样电路903和一个运算电路904,但是本申请实施例并不限于此,发射电路901、接收电路902、采样电路903、运算电路904中的任一种电路的数量也可以是至少两个。
上面对光线收发模组90的电路框架的一种实现方式进行了描述,下面将结合各个附图对光线收发模组90的结构的一些示例进行描述。
请参阅图10,光线收发模组90包括光源91、光路改变元件92、准直元件93、及探测器94。
光源91可以用于发射光脉冲序列,可选地,光源91发射出的光束为波长在可见光范围之外的窄带宽光束。在一些实施例中,光源91可以包括激光二极管(Laser diode),通过激光二极管发射纳秒级别的激光。例如,光源91发射的激光脉冲持续10ns。本实施方式中,发射电路901可包括光源91。
准直元件93设置在光源91的出光光路上,用于准直从光源91发出的激光光束,即,对光源91发出的激光光束准直,并将来自光源91的光脉冲准直后投射至扫描模组200。准直元件93位于光源91与扫描模组200之间。准直元件93还用于会聚经探测物反射、并经过扫描模组200的回光的至少一部分至探测器94。准直元件93可以是准直透镜或者是其他能够准直光束的元件。在一个实施例中,准直元件93上镀有增透膜,能够增加透射光束的强度。
光路改变元件92设置在光源91的出光光路上,用于改变光源91发出的激光光束的光路,及用于将光源91的出射光路和探测器94的接收光路合并。具体地,光路改变元件92位于准直元件93的与扫描模组200相背的一侧。光路改变元件92可以为反射镜或半反半透镜。在一个例子中,光路改变元件92为小反射镜,能够将光源91发出的激光光束的光路方向改变90度或其他角度。
探测器94与光源91放置于准直元件93的同一侧,其中,探测器94与准直元件93正对,可以理解,扫描模组200可以将光脉冲序列在不同时刻改变至不同传输方向出射,经探测物反射回的光脉冲经过扫描模组200后可入射至探测器94,而探测器94可用于将穿过准直元件93的至少部分回光转换为电信号,电信号具体可以为电脉冲,探测器94还可基于电脉冲确定探测物与激光测量装置300之间的距离。本实施方式中,探测器94可包括接收电路902、采样电路903、运算电路904和控制电路905。
激光测量装置300工作时,光源91发出激光脉冲,该激光脉冲经光路改变元件92改变光路方向(可以为改变90度或改变其他角度)后被准直元件93准直,准直后的激光脉冲被扫描模组200改变传输方向后出射并投射到探测物上,经探测物反射回的激光脉冲经过扫描模组200后至少一部分的回光被准直元件93会聚到探测器94上。探测器94将穿过准直元件93的至少部分回光转换为电信号脉冲,激光测量装置300通过该电信号脉冲的上升沿时间和/或下降沿时间确定激光脉冲接收时间。如此,激光测量装置300可以利用脉冲接收时间信息和脉冲发出时间信息计算飞行时间,从而确定探测物到激光测量装置300的距离。
本申请的激光测量装置300中的驱动器100通过将码盘50设置为导磁体,从而减小了磁体40在支撑组件30的内圈滚道311和外圈滚道321处产生的磁场强度,减少了支撑组件30内的金属磨屑聚集到内圈滚道311及外圈滚道321上,进而减小了滚珠33在内圈滚道311及外圈滚道321内滚道时滚珠33、内圈滚道311及外圈滚道321受到的磨损,提升了支撑组件30的使用寿命。同时,由于棱镜80能够改变经过棱镜80的激光脉冲的传输方向,并且驱动器100能够驱动棱镜80绕转轴OO1转动,因而扫描模组200能够增大激光测量装置300测量场景中的目标的范围。进一步地,激光测量装置300中的驱动器100通过在外壁111与外圈32之间设置绝缘环70,绝缘环70使外壁111与外圈32分离并隔绝了外壁111与外圈32之间的电性连接,从而避免了定子组件10、转子组件20与支撑组件30共同形成闭环的电路,进而避免支撑组件30在转动时受到电腐蚀,提升了支撑组件30的使用寿命。
请参阅图8,在某些实施方式中,激光测量装置300中的扫描模组200的数量至少为两个,至少两个扫描模组200包括第一扫描模组201及第二扫描模组202,第一扫描模组201的转轴OO1平行于第二扫描模组202的转轴OO2,第一扫描模组201的磁体40(第一磁体41)与第二扫描模组202的磁体40(第二磁体42)相对设置并相互排斥。
第一磁体41与第二磁体42之间的相互排斥的磁力使得:第一磁体41推动第一扫描模组201的磁轭21沿转轴OO1的方向朝第一扫描模组201的支撑组件30一侧移动,从而使得磁轭21带动支撑组件30的内圈31朝远离第一磁体41的方向移动,由于外圈32的移动受到限位壁112的限制而不能够发生移动,因而内圈31能够将滚珠33压紧在内圈滚道311及外圈滚道321上,进而当第一扫描模组201驱动转子组件20转动时,转子组件20产生的晃动较小。第一磁体41与第二磁体42之间的相互排斥的磁力还使得:第二磁体42推动第二扫描模组202的磁轭21沿转轴OO2的方向朝第二扫描模组202的支撑组件30一侧移动,从而使得磁轭21带动支撑组件30的内圈31朝远离第二磁体42的方向移动,由于外圈32的移动受到限位壁112的限制而不能够发生移动,因而内圈31能够将滚珠33压紧在内圈滚道311及外圈滚道321上,进而当第二扫描模组202驱动转子组件20转动时,转子组件20产生的晃动较小。
本实施方式的激光测量装置300中的第一扫描模组201和第二扫描模组202均包括绝缘环70。在其他实施方式中,激光测量装置300中的第一扫描模组201和第二扫描模组202均不包括绝缘环70(如图5所示),或者,第一扫描模组201和第二扫描模组202中的一个包括绝缘环70另一个不包括绝缘环70(如图11所示)。
请参阅图11,在某些实施方式中,激光测量装置300中的扫描模组200的数量至少为两个,至少两个扫描模组200还包括第三扫描模组203,第三扫描模组203的转轴OO3平行于第二扫描模组202的转轴OO2,第三扫描模组203的磁体40(第三磁体43)位于第三扫描模组203的靠近第二扫描模组202的一端。
本实施方式的第三磁体43在外界的磁场作用下使得:第三磁体43推动第三扫描模组203的磁轭21沿转轴OO3的方向朝第三扫描模组203的支撑组件30一侧移动,从而使得磁轭21带动支撑组件30的内圈31朝远离第三磁体43的方向移动,由于外圈32的移动受到限位壁112的限制而不能够发生移动,因而内圈31能够将滚珠33压紧在内圈滚道311及外圈滚道321上,进而当第三扫描模组203驱动转子组件20转动时,转子组件20产生的晃动较小。
在其他实施方式中,第三扫描模组203的外壳11上还设置有第四磁体(图未示),第四磁体位于第三磁体43的靠近第二扫描模组203的一侧并与第三磁体43相对并相互排斥,第三磁体43磁体在第四磁体之间的相互排斥的磁力使得:第三磁体43推动第三扫描模组203的磁轭21沿转轴OO3的方向朝第三扫描模组203的支撑组件30一侧移动,从而使得磁轭21带动支撑组件30的内圈31朝远离第三磁体43的方向移动,由于外圈32的移动受到限位壁112的限制而不能够发生移动,因而内圈31能够将滚珠33压紧在内圈滚道311及外圈滚道321上,进而当第三扫描模组203驱动转子组件20转动时,转子组件20产生的晃动较小。
在本说明书的描述中,参考术语“某些实施方式”、“一个实施方式”、“一些实施方式”、“示意性实施方式”、“示例”、“具体示例”、或“一些示例”等的描述意指结合所述实施方式或示例描述的具体特征、结构、材料或者特点包含于本申请的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。
尽管上面已经示出和描述了本申请的实施方式,可以理解的是,上述实施方式是示例性的,不能理解为对本申请的限制,本领域的普通技术人员在本申请的范围内可以对上述实施方式进行变化、修改、替换和变型,本申请的范围由权利要求及其等同物限定。
Claims (59)
1.一种驱动器,其特征在于,包括:
定子组件;
转子组件,所述转子组件穿设在所述定子组件内,所述定子组件用于驱动所述转子组件绕所述转子组件的转轴转动;
支撑组件,所述支撑组件套设于所述转子组件上并径向抵持于所述定子组件;
磁体,所述磁体沿所述转轴的方向套设于所述转子组件外的一侧;及
能够导磁的码盘,所述码盘套设于所述转子组件外并在所述转轴的方向上位于所述支撑组件及所述磁体之间。
2.根据权利要求1所述的驱动器,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体及环形安装壁,所述安装壁自所述本体的外表面延伸并位于所述支撑组件与所述码盘之间,所述安装壁与所述支撑组件抵触。
3.根据权利要求1所述的驱动器,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体、环形安装壁及环形定位壁,所述安装壁自所述本体的外表面延伸并位于所述支撑组件与所述码盘之间,所述定位壁自所述本体的外表面延伸并位于所述安装壁与所述支撑组件之间,所述定位壁与所述支撑组件抵触并与所述安装壁相间隔。
4.根据权利要求1所述的驱动器,其特征在于,所述驱动器还包括隔磁环,所述隔磁环套设于所述转子组件外并位于所述支撑组件与所述码盘之间,所述隔磁环与所述支撑组件抵触。
5.根据权利要求4所述的驱动器,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体及环形安装壁,所述安装壁自所述本体的外表面延伸并位于所述隔磁环与所述码盘之间。
6.根据权利要求1所述的驱动器,其特征在于,所述驱动器还包括绝缘环,所述绝缘环套设于所述支撑组件外并位于所述支撑组件与所述定子组件之间。
7.根据权利要求6所述的驱动器,其特征在于,所述转子组件包括磁轭及套设于所述磁轭外的磁铁;所述定子组件包括外壳及绕组,所述绕组套设于所述磁铁外并与所述磁铁相间隔,所述外壳套设于所述绕组和所述支撑组件外;所述支撑组件和所述磁铁在所述磁轭的轴向上相间隔,所述绝缘环位于所述外壳与所述支撑组件之间。
8.根据权利要求7所述的驱动器,其特征在于,所述支撑组件包括轴承,所述轴承包括内圈、外圈和滚珠,所述内圈套设于所述磁轭外,所述外圈固定在所述外壳内并套设于所述内圈外,所述滚珠位于所述内圈与所述外圈之间。
9.根据权利要求8所述的驱动器,其特征在于,所述外壳包括中空的外壁及环形限位壁,所述限位壁自所述外壁的内表面延伸,所述限位壁和所述外壁共同围成安装空间;所述绝缘环包括环形侧壁及环形端壁,所述端壁自所述侧壁的一端朝所述侧壁的中心延伸,所述绝缘环设置在所述安装空间内,所述端壁与所述限位壁抵持,所述外圈设置在所述绝缘环内,所述外圈的一端与所述限位壁抵持。
10.一种扫描模组,其特征在于,包括:
驱动器,所述驱动器包括定子组件、转子组件、支撑组件、磁体及能够导磁的码盘,所述转子组件穿设在所述定子组件内,所述定子组件用于驱动所述转子组件绕所述转子组件的转轴转动,所述支撑组件套设于所述转子组件上并径向抵持于所述定子组件,所述磁体沿所述转轴的方向套设于所述转子组件外的一侧,所述码盘套设于所述转子组件外并在所述转轴的方向上位于所述支撑组件及所述磁体之间;及
棱镜,所述棱镜安装在所述转子组件内,所述驱动器用于驱动所述棱镜转动以改变经过所述棱镜的激光脉冲的传输方向。
11.根据权利要求10所述的扫描模组,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体及环形安装壁,所述安装壁自所述本体的外表面延伸并位于所述支撑组件与所述码盘之间,所述安装壁与所述支撑组件抵触。
12.根据权利要求10所述的扫描模组,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体、环形安装壁及环形定位壁,所述安装壁自所述本体的外表面延伸并位于所述支撑组件与所述码盘之间,所述定位壁自所述本体的外表面延伸并位于所述安装壁与所述支撑组件之间,所述定位壁与所述支撑组件抵触并与所述安装壁相间隔。
13.根据权利要求10所述的扫描模组,其特征在于,所述驱动器还包括隔磁环,所述隔磁环套设于所述转子组件外并位于所述支撑组件与所述码盘之间,所述隔磁环与所述支撑组件抵触。
14.根据权利要求13所述的扫描模组,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体及环形安装壁,所述安装壁自所述本体的外表面延伸并位于所述隔磁环与所述码盘之间。
15.根据权利要求10所述的扫描模组,其特征在于,所述驱动器还包括绝缘环,所述绝缘环套设于所述支撑组件外并位于所述支撑组件与所述定子组件之间。
16.根据权利要求15所述的扫描模组,其特征在于,所述转子组件包括磁轭及套设于所述磁轭外的磁铁;所述定子组件包括外壳及绕组,所述绕组套设于所述磁铁外并与所述磁铁相间隔,所述外壳套设于所述绕组和所述支撑组件外;所述支撑组件和所述磁铁在所述磁轭的轴向上相间隔,所述绝缘环位于所述外壳与所述支撑组件之间。
17.根据权利要求16所述的扫描模组,其特征在于,所述支撑组件包括轴承,所述轴承包括内圈、外圈和滚珠,所述内圈套设于所述磁轭外,所述外圈固定在所述外壳内并套设于所述内圈外,所述滚珠位于所述内圈与所述外圈之间。
18.根据权利要求17所述的扫描模组,其特征在于,所述外壳包括中空的外壁及环形限位壁,所述限位壁自所述外壁的内表面延伸,所述限位壁和所述外壁共同围成安装空间;所述绝缘环包括环形侧壁及环形端壁,所述端壁自所述侧壁的一端朝所述侧壁的中心延伸,所述绝缘环设置在所述安装空间内,所述端壁与所述限位壁抵持,所述外圈设置在所述绝缘环内,所述外圈的一端与所述限位壁抵持。
19.根据权利要求10所述的扫描模组,其特征在于,所述棱镜的厚度不均匀。
20.一种激光测量装置,其特征在于,包括:
光线收发模组,所述光线收发模组用于发射激光脉冲及接收经探测物反射回的激光脉冲;及
扫描模组,所述扫描模组包括驱动器及棱镜,所述驱动器包括定子组件、转子组件、支撑组件、磁体及能够导磁的码盘,所述转子组件穿设在所述定子组件内,所述定子组件用于驱动所述转子组件绕所述转子组件的转轴转动,所述支撑组件套设于所述转子组件上并径向抵持于所述定子组件,所述磁体沿所述转轴的方向套设于所述转子组件外的一侧,所述码盘套设于所述转子组件外并在所述转轴的方向上位于所述支撑组件及所述磁体之间;所述棱镜安装在所述转子组件内;所述扫描模组设置在所述光线收发模组的出光光路上,所述驱动器用于驱动所述棱镜转动以改变经过所述棱镜的所述激光脉冲的传输方向。
21.根据权利要求20所述的激光测量装置,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体及环形安装壁,所述安装壁自所述本体的外表面延伸并位于所述支撑组件与所述码盘之间,所述安装壁与所述支撑组件抵触。
22.根据权利要求20所述的激光测量装置,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体、环形安装壁及环形定位壁,所述安装壁自所述本体的外表面延伸并位于所述支撑组件与所述码盘之间,所述定位壁自所述本体的外表面延伸并位于所述安装壁与所述支撑组件之间,所述定位壁与所述支撑组件抵触并与所述安装壁相间隔。
23.根据权利要求20所述的激光测量装置,其特征在于,所述驱动器还包括隔磁环,所述隔磁环套设于所述转子组件外并位于所述支撑组件与所述码盘之间,所述隔磁环与所述支撑组件抵触。
24.根据权利要求23所述的激光测量装置,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体及环形安装壁,所述安装壁自所述本体的外表面延伸并位于所述隔磁环与所述码盘之间。
25.根据权利要求20所述的激光测量装置,其特征在于,所述驱动器还包括绝缘环,所述绝缘环套设于所述支撑组件外并位于所述支撑组件与所述定子组件之间。
26.根据权利要求25所述的激光测量装置,其特征在于,所述转子组件包括磁轭及套设于所述磁轭外的磁铁;所述定子组件包括外壳及绕组,所述绕组套设于所述磁铁外并与所述磁铁相间隔,所述外壳套设于所述绕组和所述支撑组件外;所述支撑组件和所述磁铁在所述磁轭的轴向上相间隔,所述绝缘环位于所述外壳与所述支撑组件之间。
27.根据权利要求26所述的激光测量装置,其特征在于,所述支撑组件包括轴承,所述轴承包括内圈、外圈和滚珠,所述内圈套设于所述磁轭外,所述外圈固定在所述外壳内并套设于所述内圈外,所述滚珠位于所述内圈与所述外圈之间。
28.根据权利要求27所述的激光测量装置,其特征在于,所述外壳包括中空的外壁及环形限位壁,所述限位壁自所述外壁的内表面延伸,所述限位壁和所述外壁共同围成安装空间;所述绝缘环包括环形侧壁及环形端壁,所述端壁自所述侧壁的一端朝所述侧壁的中心延伸,所述绝缘环设置在所述安装空间内,所述端壁与所述限位壁抵持,所述外圈设置在所述绝缘环内,所述外圈的一端与所述限位壁抵持。
29.根据权利要求20所述的激光测量装置,其特征在于,所述棱镜的厚度不均匀。
30.根据权利要求20所述的激光测量装置,其特征在于,所述扫描模组的数量至少为两个,至少两个所述扫描模组包括第一扫描模组及第二扫描模组,所述第一扫描模组的所述转轴平行于所述第二扫描模组的所述转轴,所述第一扫描模组的所述磁体与所述第二扫描模组的所述磁体相对设置并相互排斥。
31.根据权利要求30所述的激光测量装置,其特征在于,至少两个所述扫描模组还包括第三扫描模组,所述第三扫描模组的所述转轴平行于所述第二扫描模组的所述转轴,所述第三扫描模组的所述磁体位于所述第三扫描模组的靠近所述第二扫描模组的一端。
32.一种驱动器,其特征在于,包括:
定子组件;
转子组件,所述转子组件穿设在所述定子组件内并与所述定子组件间隔设置,所述定子组件用于驱动所述转子组件绕所述转子组件的转轴转动;
支撑组件,所述支撑组件套设于所述转子组件上并位于所述转子组件与所述定子组件之间;及
绝缘环,所述绝缘环套设于所述支撑组件外并位于所述支撑组件与所述定子组件之间;
所述驱动器还包括磁体及能够导磁的码盘,所述磁体套设于所述转子组件外并位于所述支撑组件的一侧,所述码盘套设于所述转子组件外并位于所述支撑组件及所述磁体之间。
33.根据权利要求32所述的驱动器,其特征在于,所述转子组件包括磁轭及套设于所述磁轭外的磁铁;所述定子组件包括外壳及绕组,所述绕组套设于所述磁铁外并与所述磁铁相间隔,所述外壳套设于所述绕组和所述支撑组件外;所述支撑组件和所述磁铁在所述磁轭的轴向上相间隔,所述绝缘环位于所述外壳与所述支撑组件之间。
34.根据权利要求33所述的驱动器,其特征在于,所述支撑组件包括轴承,所述轴承包括内圈、外圈和滚珠,所述内圈套设于所述磁轭外,所述外圈固定在所述外壳内并套设于所述内圈外,所述滚珠位于所述内圈与所述外圈之间。
35.根据权利要求34所述的驱动器,其特征在于,所述外壳包括中空的外壁及环形限位壁,所述限位壁自所述外壁的内表面延伸,所述限位壁和所述外壁共同围成安装空间;所述绝缘环包括环形侧壁及环形端壁,所述端壁自所述侧壁的一端朝所述侧壁的中心延伸,所述绝缘环设置在所述安装空间内,所述端壁与所述限位壁抵持,所述外圈设置在所述绝缘环内,所述外圈的一端与所述限位壁抵持。
36.根据权利要求32所述的驱动器,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体及环形安装壁,所述安装壁自所述本体的外表面延伸并位于隔磁环与所述磁体之间,所述安装壁与所述支撑组件抵触。
37.根据权利要求32所述的驱动器,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体、环形安装壁及环形定位壁,所述安装壁自所述本体的外表面延伸并位于所述支撑组件与所述码盘之间,所述定位壁自所述本体的外表面延伸并位于所述安装壁与所述支撑组件之间,所述定位壁与所述支撑组件抵触并与所述安装壁相间隔。
38.根据权利要求32所述的驱动器,其特征在于,所述驱动器还包括隔磁环,所述隔磁环套设于所述转子组件外并位于所述支撑组件与所述码盘之间,所述隔磁环与所述支撑组件抵触。
39.根据权利要求38所述的驱动器,其特征在于,所述转子组件包括磁轭,所述 磁轭包括环形的本体及环形安装壁,所述安装壁自所述本体的外表面延伸并位于所述隔磁环与所述码盘之间。
40.一种扫描模组,其特征在于,包括:
驱动器,所述驱动器包括定子组件、转子组件、支撑组件及绝缘环,所述转子组件穿设在所述定子组件内并与所述定子组件间隔设置,所述定子组件用于驱动所述转子组件绕所述转子组件的转轴转动;所述支撑组件套设于所述转子组件上并位于所述转子组件与所述定子组件之间;所述绝缘环套设于所述支撑组件外并位于所述支撑组件与所述定子组件之间;及
棱镜,所述棱镜安装在所述转子组件内,所述驱动器用于驱动所述棱镜转动以改变经过所述棱镜的激光脉冲的传输方向;
所述驱动器还包括磁体及能够导磁的码盘,所述磁体套设于所述转子组件外并位于所述支撑组件的一侧,所述码盘套设于所述转子组件外并位于所述支撑组件及所述磁体之间。
41.根据权利要求40所述的扫描模组,其特征在于,所述转子组件包括磁轭及套设于所述磁轭外的磁铁;所述定子组件包括外壳及绕组,所述绕组套设于所述磁铁外并与所述磁铁相间隔,所述外壳套设于所述绕组和所述支撑组件外;所述支撑组件和所述磁铁在所述磁轭的轴向上相间隔,所述绝缘环位于所述外壳与所述支撑组件之间。
42.根据权利要求41所述的扫描模组,其特征在于,所述支撑组件包括轴承,所述轴承包括内圈、外圈和滚珠,所述内圈套设于所述磁轭外,所述外圈固定在所述外壳内并套设于所述内圈外,所述滚珠位于所述内圈与所述外圈之间。
43.根据权利要求42所述的扫描模组,其特征在于,所述外壳包括中空的外壁及环形限位壁,所述限位壁自所述外壁的内表面延伸,所述限位壁和所述外壁共同围成安装空间;所述绝缘环包括环形侧壁及环形端壁,所述端壁自所述侧壁的一端朝所述侧壁的中心延伸,所述绝缘环设置在所述安装空间内,所述端壁与所述限位壁抵持,所述外圈设置在所述绝缘环内,所述外圈的一端与所述限位壁抵持。
44.根据权利要求40所述的扫描模组,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体及环形安装壁,所述安装壁自所述本体的外表面延伸并位于隔磁环与所述磁体之间,所述安装壁与所述支撑组件抵触。
45.根据权利要求40所述的扫描模组,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体、环形安装壁及环形定位壁,所述安装壁自所述本体的外表面延伸并位于所述支撑组件与所述码盘之间,所述定位壁自所述本体的外表面延伸并位于所述安装壁与所述支撑组件之间,所述定位壁与所述支撑组件抵触并与所述安装壁相间隔。
46.根据权利要求40所述的扫描模组,其特征在于,所述驱动器还包括隔磁环,所述隔磁环套设于所述转子组件外并位于所述支撑组件与所述码盘之间,所述隔磁环与所述支撑组件抵触。
47.根据权利要求46所述的扫描模组,其特征在于,所述转子组件包括磁轭,所述 磁轭包括环形的本体及环形安装壁,所述安装壁自所述本体的外表面延伸并位于所述隔磁环与所述码盘之间。
48.根据权利要求40所述的扫描模组,其特征在于,所述棱镜的厚度不均匀。
49.一种激光测量装置,其特征在于,包括:
光线收发模组,所述光线收发模组用于发射激光脉冲及接收经探测物反射回的激光脉冲;及
扫描模组,所述扫描模组包括驱动器及棱镜;所述驱动器包括定子组件、转子组件、支撑组件及绝缘环,所述转子组件穿设在所述定子组件内并与所述定子组件间隔设置,所述定子组件用于驱动所述转子组件绕所述转子组件的转轴转动;所述支撑组件套设于所述转子组件上并位于所述转子组件与所述定子组件之间;所述绝缘环套设于所述支撑组件外并位于所述支撑组件与所述定子组件之间;所述棱镜安装在所述转子组件内;所述扫描模组设置在所述光线收发模组的出光光路上,所述驱动器用于驱动所述棱镜转动以改变经过所述棱镜的所述激光脉冲的传输方向;
所述驱动器还包括磁体及能够导磁的码盘,所述磁体套设于所述转子组件外并位于所述支撑组件的一侧,所述码盘套设于所述转子组件外并位于所述支撑组件及所述磁体之间。
50.根据权利要求49所述的激光测量装置,其特征在于,所述转子组件包括磁轭及套设于所述磁轭外的磁铁;所述定子组件包括外壳及绕组,所述绕组套设于所述磁铁外并与所述磁铁相间隔,所述外壳套设于所述绕组和所述支撑组件外;所述支撑组件和所述磁铁在所述磁轭的轴向上相间隔,所述绝缘环位于所述外壳与所述支撑组件之间。
51.根据权利要求50所述的激光测量装置,其特征在于,所述支撑组件包括轴承,所述轴承包括内圈、外圈和滚珠,所述内圈套设于所述磁轭外,所述外圈固定在所述外壳内并套设于所述内圈外,所述滚珠位于所述内圈与所述外圈之间。
52.根据权利要求51所述的激光测量装置,其特征在于,所述外壳包括中空的外壁及环形限位壁,所述限位壁自所述外壁的内表面延伸,所述限位壁和所述外壁共同围成安装空间;所述绝缘环包括环形侧壁及环形端壁,所述端壁自所述侧壁的一端朝所述侧壁的中心延伸,所述绝缘环设置在所述安装空间内,所述端壁与所述限位壁抵持,所述外圈设置在所述绝缘环内,所述外圈的一端与所述限位壁抵持。
53.根据权利要求49所述的激光测量装置,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体及环形安装壁,所述安装壁自所述本体的外表面延伸并位于隔磁环与所述磁体之间,所述安装壁与所述支撑组件抵触。
54.根据权利要求49所述的激光测量装置,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体、环形安装壁及环形定位壁,所述安装壁自所述本体的外表面延伸并位于所述支撑组件与所述码盘之间,所述定位壁自所述本体的外表面延伸并位于所述安装壁与所述支撑组件之间,所述定位壁与所述支撑组件抵触并与所述安装壁相间隔。
55.根据权利要求49所述的激光测量装置,其特征在于,所述驱动器还包括隔磁环,所述隔磁环套设于所述转子组件外并位于所述支撑组件与所述码盘之间,所述隔磁环与所述支撑组件抵触。
56.根据权利要求55所述的激光测量装置,其特征在于,所述转子组件包括磁轭,所述磁轭包括环形的本体及环形安装壁,所述安装壁自所述本体的外表面延伸并位于所述隔磁环与所述码盘之间。
57.根据权利要求49所述的激光测量装置,其特征在于,所述棱镜的厚度不均匀。
58.根据权利要求49所述的激光测量装置,其特征在于,所述扫描模组的数量至少为两个,至少两个所述扫描模组包括第一扫描模组及第二扫描模组,所述第一扫描模组的所述转轴平行于所述第二扫描模组的所述转轴,所述第一扫描模组的所述磁体与所述第二扫描模组的所述磁体相对设置并相互排斥。
59.根据权利要求58所述的激光测量装置,其特征在于,至少两个所述扫描模组还包括第三扫描模组,所述第三扫描模组的所述转轴平行于所述第二扫描模组的所述转轴,所述第三扫描模组的所述磁体位于所述第三扫描模组的靠近所述第二扫描模组的一端。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2019/070927 WO2020142913A1 (zh) | 2019-01-09 | 2019-01-09 | 驱动器、扫描模组及激光测量装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111670341A CN111670341A (zh) | 2020-09-15 |
| CN111670341B true CN111670341B (zh) | 2022-07-15 |
Family
ID=71520592
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980005729.9A Expired - Fee Related CN111670341B (zh) | 2019-01-09 | 2019-01-09 | 驱动器、扫描模组及激光测量装置 |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN111670341B (zh) |
| WO (1) | WO2020142913A1 (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114623849B (zh) * | 2022-03-10 | 2023-09-15 | 朝阳市加华电子有限公司 | 一种光电编码器模块化码盘 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001183444A (ja) * | 1999-12-27 | 2001-07-06 | Minolta Co Ltd | 測距装置 |
| CN101030725A (zh) * | 2006-03-02 | 2007-09-05 | 赵典军 | 车用缓速器 |
| CN101572159A (zh) * | 2009-02-26 | 2009-11-04 | 浙江工业大学 | 耐高压低惯量旋转电磁铁 |
| CN101931300A (zh) * | 2009-06-19 | 2010-12-29 | 建准电机工业股份有限公司 | 无刷直流马达及其定子 |
| CN102868279A (zh) * | 2012-09-12 | 2013-01-09 | 沈阳市蓝光自动化技术有限公司 | 低速电机磁旋转编码器 |
| CN102928978A (zh) * | 2012-11-02 | 2013-02-13 | 北京航空航天大学 | 一种基于旋转双楔镜的光束扫描机构 |
| CN203166676U (zh) * | 2013-04-14 | 2013-08-28 | 王必生 | 一种电机轴承室的绝缘结构 |
| CN204290620U (zh) * | 2014-12-31 | 2015-04-22 | 深圳市大疆创新科技有限公司 | 电机、动力装置及使用该动力装置的飞行器 |
| CN106052723A (zh) * | 2016-06-01 | 2016-10-26 | 江苏森尼克电子科技有限公司 | 一种磁编码器及其导磁码盘及导磁码盘的制备方法 |
| CN108496298A (zh) * | 2017-04-28 | 2018-09-04 | 深圳市大疆创新科技有限公司 | 驱动装置、激光测量装置及移动平台 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN205602145U (zh) * | 2016-01-19 | 2016-09-28 | 深圳市大疆创新科技有限公司 | 电机、动力装置及使用该动力装置的无人飞行器 |
| CN205469814U (zh) * | 2016-03-31 | 2016-08-17 | 深圳市大疆创新科技有限公司 | 电机以及具有该电机的动力装置、无人飞行器 |
-
2019
- 2019-01-09 WO PCT/CN2019/070927 patent/WO2020142913A1/zh active Application Filing
- 2019-01-09 CN CN201980005729.9A patent/CN111670341B/zh not_active Expired - Fee Related
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001183444A (ja) * | 1999-12-27 | 2001-07-06 | Minolta Co Ltd | 測距装置 |
| CN101030725A (zh) * | 2006-03-02 | 2007-09-05 | 赵典军 | 车用缓速器 |
| CN101572159A (zh) * | 2009-02-26 | 2009-11-04 | 浙江工业大学 | 耐高压低惯量旋转电磁铁 |
| CN101931300A (zh) * | 2009-06-19 | 2010-12-29 | 建准电机工业股份有限公司 | 无刷直流马达及其定子 |
| CN102868279A (zh) * | 2012-09-12 | 2013-01-09 | 沈阳市蓝光自动化技术有限公司 | 低速电机磁旋转编码器 |
| CN102928978A (zh) * | 2012-11-02 | 2013-02-13 | 北京航空航天大学 | 一种基于旋转双楔镜的光束扫描机构 |
| CN203166676U (zh) * | 2013-04-14 | 2013-08-28 | 王必生 | 一种电机轴承室的绝缘结构 |
| CN204290620U (zh) * | 2014-12-31 | 2015-04-22 | 深圳市大疆创新科技有限公司 | 电机、动力装置及使用该动力装置的飞行器 |
| CN106052723A (zh) * | 2016-06-01 | 2016-10-26 | 江苏森尼克电子科技有限公司 | 一种磁编码器及其导磁码盘及导磁码盘的制备方法 |
| CN108496298A (zh) * | 2017-04-28 | 2018-09-04 | 深圳市大疆创新科技有限公司 | 驱动装置、激光测量装置及移动平台 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111670341A (zh) | 2020-09-15 |
| WO2020142913A1 (zh) | 2020-07-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11802762B2 (en) | Laser-based measurement device and movable platform | |
| KR101820187B1 (ko) | 광학적 측정 장치를 위한 편향 거울 부품 및 상응하는 광학적 측정 장치 | |
| US20210311173A1 (en) | Laser measuring device and unmanned aerial vehicle | |
| CN109991617B (zh) | 激光雷达 | |
| WO2017096321A1 (en) | Compact wedge prism beam steering | |
| CN110346811B (zh) | 激光雷达及其探测装置 | |
| CN111670341B (zh) | 驱动器、扫描模组及激光测量装置 | |
| CN220271559U (zh) | 激光雷达及移动设备 | |
| CN112636500B (zh) | 中空电机、驱动装置、激光测量装置和移动平台 | |
| CN209488391U (zh) | 驱动器、扫描模组及激光测量装置 | |
| CN209483807U (zh) | 深沟球轴承、驱动器、扫描模组及激光测量装置 | |
| RU2666224C1 (ru) | Система сканирования для лидара, основанного на отражателе с магнитной подвеской | |
| CN110609265A (zh) | 一种用于激光雷达的轴承安装结构及激光雷达 | |
| EP3822657B1 (en) | Multi-beam measuring device with high directional stability for 3d scanning of an environment | |
| CN216696662U (zh) | 测距雷达和移动机器人 | |
| CN114244065A (zh) | 一种音圈电机及柔性振动盘 | |
| CN220171239U (zh) | 一种旋转式激光雷达 | |
| WO2021138752A1 (zh) | 扫描模组、测距装置及移动平台 | |
| CN111381240A (zh) | 激光雷达和清洁机器人 | |
| CN114063038A (zh) | 测距雷达和移动机器人 | |
| CN212749254U (zh) | 测量装置 | |
| CN216748085U (zh) | 激光雷达 | |
| WO2023065117A1 (zh) | 扫描模组及测距装置 | |
| CN111999738A (zh) | 测量装置 | |
| CN220171238U (zh) | 一种旋转式激光雷达 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20220715 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |