CN111220324B - 一种mems微力-力矩传感器的标定装置及标定方法 - Google Patents
一种mems微力-力矩传感器的标定装置及标定方法 Download PDFInfo
- Publication number
- CN111220324B CN111220324B CN202010074375.8A CN202010074375A CN111220324B CN 111220324 B CN111220324 B CN 111220324B CN 202010074375 A CN202010074375 A CN 202010074375A CN 111220324 B CN111220324 B CN 111220324B
- Authority
- CN
- China
- Prior art keywords
- force
- sensor
- mems micro
- axis
- platform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L25/00—Testing or calibrating of apparatus for measuring force, torque, work, mechanical power, or mechanical efficiency
Abstract
本发明涉及一种MEMS微力‑力矩传感器的标定装置,其特征在于,包括测试平台、设于测试平台上的纳米压痕仪、设于纳米压痕仪的放置平台上的斜面平台组件、以及与待测MEMS微力‑力矩传感器连接的模数转换电路和传感器供电电源;斜面平台组件包括若干个斜面倾斜角度不同的斜面平台元件;所述的待测MEMS微力‑力矩传感器为六轴传感器,包括传感器本体和与所述的传感器本体连接的立柱;所述的传感器本体固定于所述的斜面平台元件的斜面上;所述的纳米压痕仪的施力杆与所述的立柱在竖直方向上对齐。与现有技术相比,本发明具有成本低,标定精度高等优点。
Description
技术领域
本发明涉及一种,尤其是涉及一种MEMS微力-力矩传感器的标定装置及标定方法。
背景技术
机器人手指里面使用的接触式传感器,是使用半导体材料单晶硅制作而成,部件包括半球硅胶外壳,传力杆,基座,传感芯片,线路板,导线,这是一种可以连接到机器人指尖的接触式传感器,通过物体之间的压力,引起电压的变化,从而产生力和力矩,这个传感器使得机器人可以准确的拿起物体,并进行物体识别。这种传感器是一个六轴传感器,通过其压阻效应可将施加的力进行分解,得到其水平和竖直两个方向的分量,以此来对比电压和施加力的大小。通过将这种传感器阵列高密度集成在柔性基板上,在进一步制造出高性能传感器,这种接触式传感器的目标功能:第一目的是对被握持物的识别,是获得不能获得暗处或遮物的影等视觉信息的状况、环境下物体的形状识别、以及硬度和材质等接触后才知道的关于被握持物的信息。第二目的是获得用于在机械手握住并操作物体时进行用于进行稳定控制的信息。这些信息包括施加到被握持物上的握持力、在被握持物与手之间产生的滑动、通过被握持物的自重向手施加力矩等。而且模仿生物体的人工触觉传感器的性能还远未达到生物体的灵敏度。然而,触觉传感器通常具有比活生物体更高的分辨率,并且可以获得定量信息。这种属性被认为适用于人类难以完成的任务,例如医学手术和工业用途(尤其是需要经验和技能的精确工作)。另外,认为即使在需要诸如福利,家庭和娱乐之类的人类兼容性的机器人中,也可以开发具有柔性接触部分的触觉传感器。未来的方向有望应用于阵列,智能和传感器融合。为了满足这些期望,传感器和信息处理技术的集成是必不可少的,并且与半导体技术越来越兼容的MEMS制造技术的利用和进步被认为是重要的。
中国专利CN101109670A公布了一种三向力传感器标定装置。装有X向加载机构的X向平移用直线导轨和装有Y向加载机构的Y向平移用直线导轨以相互正交的方式固定在标定工作台上,横梁的两端固定在横梁升降用滚珠丝杠上,横梁升降用滚珠丝杠垂直安装在标定工作台上,Z向加载机构固定在横梁上;分别装在X向、Y向和Z向加载机构上的标准力传感器相交,定位加载夹具夹紧被标定三向力传感器,放置在标定工作台上并位于三个传感器交点,电机带动两根横梁升降用滚珠丝杠在Z方向同步直线运动。但是该装置在实际使用时受到很多限制,一是滚珠丝杠的转动带动滑动横梁上下移动,但是两个滚珠丝杠如果不能同步转动就会造成横梁两端高度不一致,进而使Z向加载力方向发生偏转,对实验数据影响很大;二是X向、Y向和Z向加载机构上标定力传感器作用点正交与一点,三个方向的加载机构只能在单一方向上移动,但是在实际使用中要求加载机构能实现多方向的移动来满足测量的要求,同时也限制了传感器尺寸的大小,对尺寸大的传感器进行标定时就需要在此装置的基础上移动或是增加复杂的附加装置来实现;在使用过程中,需要分别控制X、Y、Z方向上的加载机构,操作不便。
发明内容
本发明的目的就是为了克服上述现有技术存在的精度不佳、标定过程复杂、操作不便等缺陷而提供一种MEMS微力-力矩传感器的标定装置及标定方法。
本发明的目的可以通过以下技术方案来实现:
一种MEMS微力-力矩传感器的标定装置,其特征在于,包括测试平台、设于测试平台上的纳米压痕仪、设于纳米压痕仪的放置平台上的斜面平台组件、以及与待测MEMS微力-力矩传感器连接的模数转换电路和传感器供电电源;所述的斜面平台组件包括若干个斜面倾斜角度不同的斜面平台元件;所述的待测MEMS微力-力矩传感器为六轴传感器,包括传感器本体和与所述的传感器本体连接的立柱;所述的传感器本体固定于所述的斜面平台元件的斜面上;所述的纳米压痕仪的施力杆与所述的立柱在竖直方向上对齐。
所述的斜面平台元件为顶部设有斜面的圆柱体。
所述的斜面平台元件的材质为铝材。
铝材质轻便,不容易损坏纳米压痕仪。
所述的斜面平台元件通过双面胶固定于纳米压痕仪的放置平台上。
所述的传感器本体通过双面胶固定于所述的斜面平台元件的斜面上。
通过双面胶完成固定,由于纳米压痕仪z方向上施加的最大力为10N,分到斜面的分力远远小于双面胶产生的摩擦力,因此不至于让传感器本体和斜面平台元件在水平方向上移动。
所述的施力杆上套有硅胶橡胶套,并且该硅胶橡胶套的顶部设有半球形的第一硅胶垫;所述的待测MEMS微力-力矩传感器的立柱上套设有半球形的第二硅胶垫;所述的第一硅胶垫的球面与第二硅胶垫的球面接触连接。
本发明还提供了一种MEMS微力-力矩传感器的标定装置的使用方法,包括以下步骤:
(1)将所述的待测MEMS微力-力矩传感器通过双面胶置于纳米压痕仪的放置平台上,启动纳米压痕仪使纳米压痕仪的施力杆下降,通过所述的立柱将垂直于所述的传感器本体表面的力施加到传感器本体上,通过模数转换电路测得待测MEMS微力-力矩传感器的输出电压,并记录所述的施力杆施加的力和力矩数值,绘制出输出压力和力的变化关系图,作为对比数据;测量完成后,纳米压痕仪的施力杆回缩复位;
(2)将待测MEMS微力-力矩传感器从所述的放置平台上取出,将所述的斜面平台元件通过双面胶固定于纳米压痕仪的放置平台上,然后将所述的传感器本体通过双面胶固定于斜面平台元件上,并且使传感器本体的Y轴与所述传感器本体的倾向的下滑方向存在φ角,0°<φ角<90°;启动纳米压痕仪使纳米压痕仪的施力杆下降,通过立柱对所述的传感器本体施加力,通过模数转换电路测得待测MEMS微力-力矩传感器的X轴、Y轴、Z轴上的输出电压,并且采用正交分解的方法将所述的施力杆施加的力分解到X轴、Y轴、Z轴对应的方向上得到分解力数值,获得X轴、Y轴、Z轴的输出电压和分解力的对应数据;测量完成后,纳米压痕仪的施力杆回缩复位;
(3)更换倾斜角度不同的斜面平台元件,重复步骤(b)得到不同的输出电压和分解力的对应数据,并绘X轴、Y轴、Z轴对应的方向上的制输出压力和力的变化关系图。
步骤(a)和步骤(b)中,所述的纳米压痕仪的施力杆的下降速度为0.08~0.12mm/秒,当施力杆到达施加力的目标值时,施力杆静止5秒后返回。
步骤(a)和步骤(b)中,所述的纳米压痕仪启动时施力杆与斜面平台元件的最高点距离为4.5~5.5cm。
斜面平台元件的最高点高度与纳米压痕仪施加棒收缩时的间距在5CM左右是因为有足够的观测时间,并且保持一定的工作距离。
本发明通过设计一个带有斜面的平台,从而使在竖直方向上的力可以在力矩传感器的X轴、Y轴、Z轴形成的坐标体系内进行正交分解,从而可以对传感器进行X、Y、Z方向的加载,一次测量即可获得三组数据,使得标定具有多维性,操作更加简便,降低了测量成本以及增加了标定结果的精度。
与现有技术相比,本发明具有以下优点:
(1)采用带有斜面的平台,配合力的正交分解,使得标定不止局限于Z方向,可以同时在X-Y-Z三个方向上同时标定力的大小;更加真实的模拟了六轴传感器的受力情况,测量结果更加精确;
(2)同时获得X-Y-Z三个方向的标定结果,操作简单,测量速度快,提高了标定效率;
(3)通过纳米压痕仪施加力,加载过程精度高,加载过程平稳和准确,进一步提高了测量精度;
(4)在立柱和施力杆的表面设计半球形橡胶,通过半球形橡胶接触施加压力,避免了施力杆和立柱的硬接触,有利于保护施力杆和立柱。
附图说明
图1为本发明的结构示意图;
图2为图1中A部的局部放大图;
图3为本发明中待测MEMS微力-力矩传感器和施力杆的结构示意图;
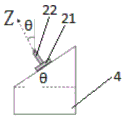
图4为力的分解过程示意图;
图中,1为纳米压痕仪,11为施力杆,2为待测MEMS微力-力矩传感器,21为传感器本体,22为立柱,3为供电电源,4为斜面平台元件,5为模数转换电路,6为计算机,7为第一硅胶垫,8为第二硅胶垫,θ为待测微压阻力-力矩传感器的Z轴与竖直方向的夹角。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
实施例
一种MEMS微力-力矩传感器的标定装置,如图1所示,包括测试平台、设于测试平台上的纳米压痕仪1、设于纳米压痕仪1的放置平台上的斜面平台组件、以及与待测MEMS微力-力矩传感器2连接的模数转换电路5和传感器供电电源3,为了方面显示数据,模数转换电路5与一计算机6连接。
待测MEMS微力-力矩传感器2为六轴传感器,包括传感器本体21和与传感器本体21连接的立柱22;传感器本体21固定于斜面平台元件4的斜面上;纳米压痕仪1的施力杆11与立柱22在竖直方向上对齐。待测MEMS微力-力矩传感器2由其PCB,基板,盖子,引线,传感器,立柱,以及硅胶外壳组成。将传感芯片粘附到塑料基板上。环氧树脂用于粘附,用金线键合传感芯片的键合焊盘和电路板的布线。用环氧树脂粘合塑料外壳。立柱从壳体的中心孔用环氧树脂粘结到感测芯片的中心板上,盖上盖子。之后把其接触式传感器固定在纳米压痕仪上。
本实施例中,纳米压痕仪型号为岛图试微压缩试验机HMV2000,纳米压痕仪的施力杆采用铝材,其强度在10n以下,杆的速度为0.1mm/秒,在达到目标施加力后,使杆停止5秒并返回;施力杆作为载荷单元对立柱22施加力,为最大可施加应力为10n、分辨率为0.01N的载荷单元;纳米压痕仪与计算机连接,计算机可以显示并记录施力杆上的力。
斜面平台组件包括若干个斜面倾斜角度不同的斜面平台元件4,斜面平台元件4为顶部设有斜面的圆柱体,并且其材质为铝材;测量时,斜面平台元件4通过双面胶固定于纳米压痕仪1的放置平台上;传感器本体21通过双面胶固定于斜面平台元件4的斜面上,如图2所示。斜面平台元件4的法向方向即为待测MEMS微力-力矩传感器2的立柱21的延伸方向,也是待测MEMS微力-力矩传感器2的Z向方向,待测微压阻力-力矩传感器的Z轴与竖直方向的夹角为θ角,如图4所示,θ角也为斜面平台的斜面相对于水平面的夹角;将传感器本体21放置于斜面平台的斜面上,并且传感器本体21的X轴和Y轴分别与斜面平台的斜面的X轴和Y轴重合,以此为基准位置,将传感器本体21旋转φ角,即传感器本体21的水平转动与初始X轴之间的夹角为φ角,一共有三个斜面测试状态,分别对应θ=30°,φ=45°;θ=30°,φ=0°;θ=30°,φ=90°。施力杆11上套有硅胶橡胶套,并且该硅胶橡胶套的顶部设有半球形的第一硅胶垫7;待测MEMS微力-力矩传感器2的立柱22上套设有半球形的第二硅胶垫8;第一硅胶垫7的球面与第二硅胶垫8的球面接触连接,如图3所示。
供电电源运用其5V电源即可,为待测MEMS微力-力矩传感器2提供电源。
模数转换电路5连接在待测MEMS微力-力矩传感器2与计算机6之间,将数字信号转换为模拟信号以电流、电压或电荷的形式。电脑对这种信号不能直接处理,因此由利用keyence制模拟数字转换器NR-250(A/D converter)将来自传感器芯片的输出电压从模拟转换为数字信号,并利用NEC产PC、LAVIE-NX和LW40H/1(Computer)进行监测。之后转化成电脑能识别的数字信号。
计算机6接受来自模数转换电路5的数字信号,通过现有的软件即可把数字信号转换成折线图使其可以直观表现出力的的输出和电压的变化为正比。
采用上述的标定装置标定MEMS微力-力矩传感器的方法,包括以下步骤:
a将待测MEMS微力-力矩传感器2通过双面胶置于纳米压痕仪1的放置平台上,启动纳米压痕仪1使纳米压痕仪1的施力杆11下降,纳米压痕仪1启动时施力杆11与斜面平台元件4的最高点距离为5cm,通过立柱22将垂直于传感器本体21表面的力施加到传感器本体21上,通过模数转换电路5测得待测MEMS微力-力矩传感器2的输出电压,并记录施力杆11施加的力和力矩数值,绘制出输出压力和力的变化关系图,作为对比数据;测量完成后,纳米压痕仪1的施力杆11回缩复位;
b将待测MEMS微力-力矩传感器2从放置平台上取出,将斜面平台元件4通过双面胶固定于纳米压痕仪1的放置平台上,然后将传感器本体21通过双面胶固定于斜面平台元件4上,启动纳米压痕仪1使纳米压痕仪1的施力杆11下降,通过立柱22对传感器本体21施加力,通过模数转换电路5测得待测MEMS微力-力矩传感器2的X轴、Y轴、Z轴上的输出电压,并且采用正交分解的方法将施力杆11施加的力分解到X轴、Y轴、Z轴对应的方向上得到分解力数值,获得X轴、Y轴、Z轴的输出电压和分解力的对应数据;测量完成后,纳米压痕仪1的施力杆11回缩复位;每次施力杆11先将对立柱22施加力时,设置施力杆11施加力以100mN的步长从100mN增加到500mN,即依次测试100mN、200mN、300mN、400mN的施加力的输出电压。
c更换倾斜角度不同的斜面平台元件4,重复步骤2得到不同的输出电压和分解力的对应数据,并绘X轴、Y轴、Z轴对应的方向上的制输出压力和力的变化关系图。
施力杆11施加的力为F,该力在X轴、Y轴、Z轴对应的方向上的分解力分别为Fx、Fy、Fz,则


Fz=Fcosθ
本实施例提供了一种新型的标定方法来完成MEMS阵列传感器测试,可以用于微力-力矩传感器的多方位多角度同时测试,于现有技术相比,本实施例具有以下优点:1.采用其自身搭建的测试仪器,因此具有独立性,可靠性,成本也较低。2.硅单晶具有良好的线性压阻系数,不存在由于机械上的缺陷和应变粘贴时造成的迟滞和重复性误差,因此测试可以做到很高的精度。3.数据后期用折线图表示可以更加直观的看出传感器力和电压的变化呈现线性。4.斜面的运用使得标定不止局限于Z方向,可以同时在X-Y-Z三个方向上同时标定力的大小。
总之,本发明的测试大大保证了传感器元件阵列的高灵敏度和高性能,也证实了该传感器的受力与电压变化是呈现线性变化。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。
Claims (9)
1.一种MEMS微力-力矩传感器的标定装置,其特征在于,包括测试平台、设于测试平台上的纳米压痕仪(1)、设于纳米压痕仪(1)的放置平台上的斜面平台组件、以及与待测MEMS微力-力矩传感器(2)连接的模数转换电路(5)和传感器供电电源(3);所述的斜面平台组件包括若干个斜面倾斜角度θ不同的斜面平台元件(4);所述的待测MEMS微力-力矩传感器(2)为六轴传感器,包括传感器本体(21)和与所述的传感器本体(21)连接的立柱(22);所述的传感器本体(21)固定于所述的斜面平台元件(4)的斜面上;所述的传感器本体(21)的Y轴方向与传感器本体(21)在斜面平台元件(4)上的下滑倾向方向存在φ角,且0<φ<90°,所述的纳米压痕仪(1)的施力杆(11)与所述的立柱(22)在竖直方向上对齐。
2.根据权利要求1所述的一种MEMS微力-力矩传感器的标定装置,其特征在于,所述的斜面平台元件(4)为顶部设有斜面的圆柱体。
3.根据权利要求2所述的一种MEMS微力-力矩传感器的标定装置,其特征在于,所述的斜面平台元件(4)的材质为铝材。
4.根据权利要求1所述的一种MEMS微力-力矩传感器的标定装置,其特征在于,所述的斜面平台元件(4)通过双面胶固定于纳米压痕仪(1)的放置平台上。
5.根据权利要求1所述的一种MEMS微力-力矩传感器的标定装置,其特征在于,所述的传感器本体(21)通过双面胶固定于所述的斜面平台元件(4)的斜面上。
6.根据权利要求1所述的一种MEMS微力-力矩传感器的标定装置,其特征在于,所述的施力杆(11)上套有硅胶橡胶套,并且该硅胶橡胶套的顶部设有半球形的第一硅胶垫(7);所述的待测MEMS微力-力矩传感器(2)的立柱(22)上套设有半球形的第二硅胶垫(8);所述的第一硅胶垫(7)的球面与第二硅胶垫(8)的球面接触连接。
7.一种采用如权利要求1所述的标定装置标定MEMS微力-力矩传感器的方法,其特征在于,包括以下步骤:
(a)将所述的待测MEMS微力-力矩传感器(2)通过双面胶置于纳米压痕仪(1)的放置平台上,启动纳米压痕仪(1)使纳米压痕仪(1)的施力杆(11)下降,通过所述的立柱(22)将垂直于所述的传感器本体(21)表面的力施加到传感器本体(21)上,通过模数转换电路(5)测得待测MEMS微力-力矩传感器(2)的输出电压,并记录所述的施力杆(11)施加的力和力矩数值,绘制出输出压力和力的变化关系图,作为对比数据;测量完成后,纳米压痕仪(1)的施力杆(11)回缩复位;
(b)将待测MEMS微力-力矩传感器(2)从所述的放置平台上取出,将所述的斜面平台元件(4)通过双面胶固定于纳米压痕仪(1)的放置平台上,然后将所述的传感器本体(21)通过双面胶固定于斜面平台元件(4)上,启动纳米压痕仪(1)使纳米压痕仪(1)的施力杆(11)下降,通过立柱(22)对所述的传感器本体(21)施加力,通过模数转换电路(5)测得待测MEMS微力-力矩传感器(2)的X轴、Y轴、Z轴上的输出电压,并且采用正交分解的方法将所述的施力杆(11)施加的力分解到X轴、Y轴、Z轴对应的方向上得到分解力数值,获得X轴、Y轴、Z轴的输出电压和分解力的对应数据;测量完成后,纳米压痕仪(1)的施力杆(11)回缩复位;
(c)更换倾斜角度不同的斜面平台元件(4),重复步骤(b)得到不同的输出电压和分解力的对应数据,并绘X轴、Y轴、Z轴对应的方向上的制输出压力和力的变化关系图。
8.根据权利要求7所述的一种标定MEMS微力-力矩传感器的方法,其特征在于,步骤(a)和步骤(b)中,所述的纳米压痕仪(1)的施力杆(11)的下降速度为0.08~0.12mm/秒,当施力杆(11)到达施加力的目标值时,施力杆(11)静止5秒后返回。
9.根据权利要求7所述的一种标定MEMS微力-力矩传感器的方法,其特征在于,步骤(a)和步骤(b)中,所述的纳米压痕仪(1)启动时施力杆(11)与斜面平台元件(4)的最高点距离为4.5~5.5cm。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010074375.8A CN111220324B (zh) | 2020-01-22 | 2020-01-22 | 一种mems微力-力矩传感器的标定装置及标定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010074375.8A CN111220324B (zh) | 2020-01-22 | 2020-01-22 | 一种mems微力-力矩传感器的标定装置及标定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111220324A CN111220324A (zh) | 2020-06-02 |
| CN111220324B true CN111220324B (zh) | 2021-09-28 |
Family
ID=70827256
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010074375.8A Active CN111220324B (zh) | 2020-01-22 | 2020-01-22 | 一种mems微力-力矩传感器的标定装置及标定方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111220324B (zh) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115648285B (zh) * | 2022-09-19 | 2023-07-21 | 重庆智能机器人研究院 | 机器人本体零点外部校准方法 |
| CN115711701A (zh) * | 2022-11-09 | 2023-02-24 | 上海交通大学 | 基于压痕的视触觉传感器力学参数原位标定方法 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0719405A1 (de) * | 1993-09-14 | 1996-07-03 | Werner Kluft | Kraftmessvorrichtung |
| JPH10160599A (ja) * | 1996-12-04 | 1998-06-19 | Toyota Motor Corp | トルク検出装置 |
| CN101354296A (zh) * | 2008-08-04 | 2009-01-28 | 东华大学 | 织物三维压力模拟测试系统 |
| CN101865737A (zh) * | 2009-04-15 | 2010-10-20 | 友达光电(厦门)有限公司 | 压力测试装置及方法 |
| CN202562819U (zh) * | 2012-04-28 | 2012-11-28 | 长沙理工大学 | 透水性沥青混合料水稳定性的测试装置 |
| CN203606067U (zh) * | 2013-11-19 | 2014-05-21 | 广州广电计量检测无锡有限公司 | 测力传感器检定支架 |
| CN105115840A (zh) * | 2015-09-25 | 2015-12-02 | 山东交通学院 | 一种基于mts的等厚度路面结构疲劳试验装置及方法 |
| CN106525294A (zh) * | 2016-11-15 | 2017-03-22 | 中南大学 | 一种tbm滚刀用三向力标定装置及方法 |
| CN106556516A (zh) * | 2016-11-26 | 2017-04-05 | 启东锦桥轴承有限公司 | 一种可消除共振的bvt噪音测试加载装置 |
| CN108534970A (zh) * | 2018-06-01 | 2018-09-14 | 南京理工大学 | 高精度直线导轨副静刚度综合测量装置及方法 |
| CN109883611A (zh) * | 2019-03-14 | 2019-06-14 | 上海交通大学 | 一种简易的力传感器标定装置和方法 |
| CN209541987U (zh) * | 2018-11-12 | 2019-10-25 | 中国铁道科学研究院集团有限公司铁道建筑研究所 | 压电式压力传感器的标定装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN204314004U (zh) * | 2014-11-07 | 2015-05-06 | 中国矿业大学 | 一种施工立井悬吊绳与稳绳张力在线检测装置 |
| CN109374268A (zh) * | 2018-05-02 | 2019-02-22 | 中南大学 | 一种盾构机/tbm滚刀刀座疲劳应力和寿命测试方法及其装置 |
-
2020
- 2020-01-22 CN CN202010074375.8A patent/CN111220324B/zh active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0719405A1 (de) * | 1993-09-14 | 1996-07-03 | Werner Kluft | Kraftmessvorrichtung |
| JPH10160599A (ja) * | 1996-12-04 | 1998-06-19 | Toyota Motor Corp | トルク検出装置 |
| CN101354296A (zh) * | 2008-08-04 | 2009-01-28 | 东华大学 | 织物三维压力模拟测试系统 |
| CN101865737A (zh) * | 2009-04-15 | 2010-10-20 | 友达光电(厦门)有限公司 | 压力测试装置及方法 |
| CN202562819U (zh) * | 2012-04-28 | 2012-11-28 | 长沙理工大学 | 透水性沥青混合料水稳定性的测试装置 |
| CN203606067U (zh) * | 2013-11-19 | 2014-05-21 | 广州广电计量检测无锡有限公司 | 测力传感器检定支架 |
| CN105115840A (zh) * | 2015-09-25 | 2015-12-02 | 山东交通学院 | 一种基于mts的等厚度路面结构疲劳试验装置及方法 |
| CN106525294A (zh) * | 2016-11-15 | 2017-03-22 | 中南大学 | 一种tbm滚刀用三向力标定装置及方法 |
| CN106556516A (zh) * | 2016-11-26 | 2017-04-05 | 启东锦桥轴承有限公司 | 一种可消除共振的bvt噪音测试加载装置 |
| CN108534970A (zh) * | 2018-06-01 | 2018-09-14 | 南京理工大学 | 高精度直线导轨副静刚度综合测量装置及方法 |
| CN209541987U (zh) * | 2018-11-12 | 2019-10-25 | 中国铁道科学研究院集团有限公司铁道建筑研究所 | 压电式压力传感器的标定装置 |
| CN109883611A (zh) * | 2019-03-14 | 2019-06-14 | 上海交通大学 | 一种简易的力传感器标定装置和方法 |
Non-Patent Citations (2)
| Title |
|---|
| 《航向测量系统中三轴磁传感器标定的等效两步法》;石岗等;《仪器仪表学报》;20170228;402-407 * |
| 《钢轨轮廓全断面高精度动态视觉测量方法研究》;占栋等;《铁道学报》;20150930;96-106 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111220324A (zh) | 2020-06-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Kim et al. | A novel six-axis force/torque sensor for robotic applications | |
| CN111220324B (zh) | 一种mems微力-力矩传感器的标定装置及标定方法 | |
| KR102189054B1 (ko) | 역반사 다중축 힘 토크 센서들 | |
| Yousef et al. | Tactile sensing for dexterous in-hand manipulation in robotics—A review | |
| US9869597B1 (en) | Compound strain gage carrier for multi-axis force/torque sensing | |
| Suwanratchatamanee et al. | Robotic tactile sensor system and applications | |
| Vogt et al. | A soft multi-axis force sensor | |
| Kim et al. | Design of flexible tactile sensor based on three-component force and its fabrication | |
| Xi et al. | A flexible tactile sensor array based on pressure conductive rubber for three-axis force and slip detection | |
| Zhou et al. | A force decoupling method for simultaneously measuring vertical and shear force | |
| Kim et al. | Development of surgical forceps integrated with a multi-axial force sensor for minimally invasive robotic surgery | |
| Black et al. | Towards differential magnetic force sensing for ultrasound teleoperation | |
| Zhao et al. | A tri-axial touch sensor with direct silicon to PC-board packaging | |
| Zhao et al. | Design and calibration experiment of a novel rigid-flexible hybrid parallel three-dimensional force sensor with deformability | |
| Kim et al. | Displacement sensor integrated into a remote center compliance device for a robotic assembly | |
| Zhang et al. | SkinCell: A Modular Tactile Sensor Patch for Physical Human–Robot Interaction | |
| Kawashima et al. | Shear-force sensor with point-symmetric electrodes driven by LTPS TFT active matrix backplane | |
| Park et al. | Three-Axis Flat and Lightweight Force/Torque Sensor for Enhancing Kinesthetic Sensing Capability of Robotic Hand | |
| Li et al. | F-touch sensor for three-axis forces measurement and geometry observation | |
| Morton et al. | Soft 3-Axis Capacitive Force Sensor for Robotic E-Skin on Curved Surfaces | |
| CN112284438A (zh) | 一种多功能手指传感器标定工装 | |
| CN114235230B (zh) | 一种基于榫卯结构的柔性六维力传感器 | |
| Peng et al. | Modular artificial tactile receptors based on mechanical field sensing | |
| Drimus et al. | Novel approaches for bio-inspired mechano-sensors | |
| Kaneta et al. | Redesigned microcantilevers for sensitivity improvement of microelectromechanical system tactile sensors |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |