CN110889552B - 一种基于最优参数遗传算法的苹果自动装箱路径优化方法 - Google Patents
一种基于最优参数遗传算法的苹果自动装箱路径优化方法 Download PDFInfo
- Publication number
- CN110889552B CN110889552B CN201911171812.1A CN201911171812A CN110889552B CN 110889552 B CN110889552 B CN 110889552B CN 201911171812 A CN201911171812 A CN 201911171812A CN 110889552 B CN110889552 B CN 110889552B
- Authority
- CN
- China
- Prior art keywords
- apple
- chromosome
- population
- point
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/04—Forecasting or optimisation specially adapted for administrative or management purposes, e.g. linear programming or "cutting stock problem"
- G06Q10/047—Optimisation of routes or paths, e.g. travelling salesman problem
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/12—Computing arrangements based on biological models using genetic models
- G06N3/126—Evolutionary algorithms, e.g. genetic algorithms or genetic programming
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/02—Agriculture; Fishing; Forestry; Mining
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Theoretical Computer Science (AREA)
- Human Resources & Organizations (AREA)
- Strategic Management (AREA)
- General Physics & Mathematics (AREA)
- Biophysics (AREA)
- Economics (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Marketing (AREA)
- Tourism & Hospitality (AREA)
- General Business, Economics & Management (AREA)
- General Health & Medical Sciences (AREA)
- Evolutionary Biology (AREA)
- Bioinformatics & Computational Biology (AREA)
- Artificial Intelligence (AREA)
- Entrepreneurship & Innovation (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Computing Systems (AREA)
- Molecular Biology (AREA)
- Evolutionary Computation (AREA)
- Development Economics (AREA)
- Data Mining & Analysis (AREA)
- Game Theory and Decision Science (AREA)
- Computational Linguistics (AREA)
- General Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Operations Research (AREA)
- Quality & Reliability (AREA)
- Genetics & Genomics (AREA)
- Physiology (AREA)
- Agronomy & Crop Science (AREA)
- Animal Husbandry (AREA)
- Marine Sciences & Fisheries (AREA)
- Mining & Mineral Resources (AREA)
- Primary Health Care (AREA)
Abstract
本发明公开了一种基于最优参数遗传算法的苹果自动装箱路径优化方法。主要包括以下步骤:通过图像处理得到苹果抓取点位与放置点位的信息,并生成相应的点位矩阵;通过点位矩阵生成一定规模大小的初始种群;对初始种群进行交叉、变异、比较替换操作生成子代种群;重复交叉、变异、比较替换操作直至达到迭代次数输出优化结果;随机改变种群规模、交叉、变异、比较替换操作中的四个参数值代入上述遗传算法,并得到运行时间;将输出值与四个参数值进行线性拟合;基于拟合方程找出四个参数的最优值,继而重新代入上述遗传算法得到优化路径。本发明可以生成优化后的苹果自动装箱路径,该路径能够有效减少机械臂移动时间,提高机械臂工作效率。
Description
技术领域
本发明涉及智能农业生产自动化技术,尤其是涉及一种基于最优参数遗传算法的苹果自动装箱路径优化方法。
背景技术
目前农业产品生产已逐步由人工操作技术向自动化生产技术发展,农业产品生产方式升级在即。苹果相关产业是农业产品中急需改善和升级的产业之一。苹果年产量高、群众需求量大,促使相关产业规模逐年增大,国内外苹果相关产业需求不断提高。为更有效的改善苹果相关产业的发展模式以及提高工作效率,用机械臂自动装箱技术代替传统人工装箱作业不仅减少了劳动成本,降低了劳动强度,还提高了产业的工作效率,促进了产业的优化升级。
苹果自动装箱是指在视觉系统获取当前苹果抓取点位和放置点位的位置信息条件下,利用控制系统控制机械臂末端执行器将苹果从抓取点处移动到放置点处的过程。不同点位位置能够标记出多个不同的机械臂旋转角度解,从而使得机械臂在抓取点和放置点之间有着多种不同的路径可供规划,具有多样性。目前,苹果相关产业装箱环节主要依赖人工作业,费时费力,并且自动化装箱方式中主要使用固定装箱路径,工作效率低下,无法达到现代工业自动化生产的水平和要求,所以迫切需要一种苹果自动装箱路径优化方法。
发明内容
本发明目的在于提供一种基于最优参数遗传算法的苹果自动装箱路径优化方法,能够提高产业工作效率,减少相关产业工作时间,促进农业智能化生产方式升级。
为实现上述目的,本发明采用的技术方案是:
本发明通过图像处理技术得到苹果抓取点位与放置点位的位置信息,生成相应的点位矩阵;通过点位矩阵生成初始种群,初始种群是以N条染色体组成,其中抓取点位和放置点位构成的路径编码称为染色体;对初始种群染色体进行交叉、变异操作;进而对染色体进行比较替换操作,即通过对当前种群染色体进行基于机械臂末端执行器运行时间的适应度计算,并将当前种群最优染色体与历代种群最优染色体比较,保留两者中较优染色体为当前种群新最优,并用当前新最优染色体替换较差染色体;重复交叉、变异、比较替换操作的过程,直至达到迭代次数并输出优化结果;多次随机改变种群规模大小N、交叉操作中交叉概率、变异操作中变异概率、比较替换操作中比较替换概率四个操作参数的值重复进行上述操作,并得到相对应的机械臂末端执行器的运行时间和程序运行时间;将输出值与四个操作参数值进行线性拟合得到回归方程;利用穷举法在回归方程中基于各个参数的取值范围以机械臂末端执行器运行时间以及程序运算时间之和最小为目标找出合适的参数值作为遗传算法的最优参数值,进而重新执行上述遗传算法并得到最终优化后的苹果自动装箱路径。
所述的通过图像处理技术得到苹果抓取点位与放置点位的位置信息,生成相应的点位矩阵,具体过程为:提前设定苹果抓取点位和放置点位的坐标,并将抓取点位和放置点位分别按顺序进行负实数标号和正实数标号;利用图像采集装置采集并判断当前设定的苹果抓取点位和放置点位中是否存在苹果,记录目前抓取点位中存在苹果的负实数标号和目前放置点位中不存在苹果的正实数标号;将记录出的正实数标号和负实数标号分别生成实数矩阵。
所述的通过点位矩阵生成初始种群,初始种群是以N条染色体组成,其中抓取点位和放置点位构成的路径编码称为染色体,具体过程为:在苹果抓取点位对应的负实数矩阵以及苹果放置点位对应的正实数矩阵基础上,由于苹果自动装箱采用双连杆双水平旋转关节的装箱机械臂,因此在设定的抓取范围之内,末端执行器在任一位置点机械臂都有两种不同姿态旋转角度解,分别记为同一个点位的相邻实数标号,如当前末端执行器所在的位置点位编号为-2,则此位置点位的两种不同姿态旋转角度解编号为-21、-22,故负实数矩阵空间长度为2倍的抓取点个数,正实数矩阵空间长度为2倍的放置点个数,矩阵中每奇偶相邻的两个实数标号表示抓取范围内同一个点的机械臂不同姿态旋转角度解;
染色体的路径编码的初始点和最终点记为0,0表示机械臂末端执行器的初始位置和最终结束位置,初始位置和结束位置均为机械臂的两连杆自然伸展状态下位于机械臂基座正前方时末端执行器所在位置;其他偶数位编码为负实数,负实数从负实数矩阵中随机抽取;其他奇数位编码为正实数,正实数从正实数矩阵中随机抽取不同点位的任一角度解标号,同一个放置点位不重复抽取;
重复上述过程直至满足生成的种群染色体为N条,即种群规模大小为N,N取值为(10,100),取整。
所述的对初始种群染色体进行交叉操作,其交叉算法过程描述如下:假设苹果抓取点位有m个位置和苹果放置点位有n个位置,对于满足交叉概率的父代个体,其中交叉概率取值为(0,1),
a)随机产生两个正整数acr_node和acr_len,其中acr_node表示交叉起点位,范围为[2,2n+1],acr_len表示交叉长度,范围为[0,2n-1];若产生的acr_node+acr_len≥2n+1,则记acr_node+acr_len=2n+1;假设苹果抓取点位和苹果放置点位分别有4和14个位置,产生的两个数分别为acr_node=6,acr_len=12;
b)假设此时需要交叉的两个父代个体为A=[0-11 12-22 21-31 32-42 41-1252-21 61-32 72-41 81-11 92-22 101-31 112-42 121-12 132-21 141 0],B=[0-41 51-32 21-21 81-12 61-42 12-31 111-22 121-11 32-41 92-32 141-21 42-12 72-42 132-31 101 0];首先将两个父代个体的第acr_node位到第acr_node+acr_len位进行交叉互换,则得到子代个体为A1=[0-11 12-22 21-21 81-12 61-42 12-31 111-22 121-11 32-4192-22 101-31 112-42 121-12 132-21 141 0],B1=[0-41 51-32 21-31 32-42 41-1252-21 61-32 72-41 81-11 92-32 141-21 42-12 72-42 132-31 101 0];
c)分别对子代个体A1、B1中的染色体编码进行搜索检查,将A1、B1编码中未进行交叉的第acr_node位之前的编码和第acr_node+acr_len位之后的编码分别与交叉区间[acr_node,acr_node+acr_len]内的编码进行比较,若发现未进行交叉的编码区间中正实数部分与交叉区间中的正实数部分具有相同或者相邻的实数,则标记出这些实数编码并用200代替;最终子代染色体更新得A1=[0-11 200-22 21-21 81-12 61-42 12-31 111-22 121-1132-41 92-22 101-31 200-42 200-12 132-21 141 0],B1=[0-41 200-32 21-31 32-4241-12 52-21 61-32 72-41 81-11 92-32 141-21 200-12 200-42 132-31 101 0];
d)对当前含有200的每个染色体进行扫描,标记出A1、B1染色体中已存在的大于0且不等于200的实数编码,将这些实数编码映射到苹果放置点的位置,即标记出当前染色体中已有的苹果放置点位;从初始苹果放置点位中去除已标记的苹果放置点位,得到未使用的苹果放置点位;将含有200的染色体中每个实数200随机替换成未使用的任一苹果放置点位中任一角度解标号,苹果放置点位不可重复选取;于是子代染色体更新得A1=[0-11 71-22 21-21 81-12 61-42 12-31 111-22 121-11 32-41 92-22 101-31 42-42 52-12 132-21 141 0],B1=[0-41 111-32 21-31 32-42 41-12 52-21 61-32 72-41 81-11 92-32141-21 12-12 122-42 132-31 101 0]。
所述的对当前种群染色体进行变异操作,其变异算法过程具体表现为:对于满足变异概率的染色体,变异概率取值为(0,1),随机生成一个在区间[2,2n+1]的正整数mut_node,其中n为放置点位个数,若mut_node为奇数,观察染色体中在此奇数位编码上的实数是正奇数还是正偶数,若是正奇数则加1,若是正偶数则减1;若mut_node为偶数,观察此偶数位编码上的实数是负奇数还是负偶数,若是负奇数则减1,若是负偶数则加1;最终更新得到新的染色体。
所述的比较替换操作中对当前种群染色体进行基于机械臂末端执行器运行时间的适应度计算,适应度函数为fitness(x)=1/Time(x),将每条染色体的适应度值置于区间(0,1),其中Time(x)表示为当前染色体所规划路径运行的总时间;
所述的将当前种群最优染色体与历代种群最优染色体比较,保留两者中较优染色体为当前种群最优,具体表现为:将已经计算过适应度值的染色体进行排序,记录当前染色体中最优染色体及其适应度值于ch_best及Max_fit中,将此染色体的适应度值Max_fit和历代种群最优染色体的适应度值相比较,适应度值较高者保留为新历代最优染色体,比较所得的新历代最优染色体及其适应度值为ch_best_new及Max_fit_new;
所述的用当前新历代最优染色体替换较差染色体,具体表现为:通过适应度限制条件fitness_limit=(Max_fit_new-Min_fit)×coefficient+Min_fit,将当前种群染色体适应度值小于fitness_limit的染色体全部标记出来,并将当前种群中适应度值小于fitness_limit的染色体全部用当前新历代最优染色体进行替换,最终形成N条染色体的新一代种群,其中Max_fit_new表示当前新历代最优染色体适应度值,Min_fit表示当前种群中染色体最低适应度值,coefficient表示比较替换概率且取值区间为(0,1)。
所述的重复交叉、变异、比较替换操作的过程,直至达到迭代次数输出优化结果,具体表现为:每一次种群中所有染色体完成交叉、变异、比较替换操作视为一次迭代过程,当前迭代所得的新种群作为下一次迭代过程的输入种群,最终迭代次数设为iter,即运算iter代将最终优化后的苹果自动装箱路径和时间输出。
所述的多次随机改变种群规模大小N、交叉操作中交叉概率、变异操作中变异概率、比较替换操作中比较替换概率四个操作参数的值重复进行上述操作,并得到相对应的机械臂末端执行器的运行时间和程序运行时间,具体表现为:通过随机函数生成H组不重复的种群规模、交叉概率、变异概率、比较替换概率值,种群染色体在上述交叉、变异、比较替换的操作流程下,每一组参数能输出一个相对应的机械臂末端执行器的运行时间值Time_action以及程序运算时间值Time_operation,并记录下来。
所述的将输出值与四个操作参数值进行线性拟合并得到回归方程,具体表现为:将H组不重复的种群规模、交叉概率、变异概率、比较替换概率值作为输入以及机械臂末端执行器的运行时间值Time_action、程序运算时间值Time_operation作为输出建立回归模型,最终求得两个线性回归方程分别为机械臂末端执行器的运行时间值Time_action与种群规模、交叉概率、变异概率、比较替换概率的回归方程以及程序运算时间值Time_operation与种群规模、交叉概率、变异概率、比较替换概率的回归方程。
所述的利用穷举法在回归方程中基于各个参数的取值范围以机械臂末端执行器运行时间以及程序运算时间之和最小为目标找出合适的参数值作为遗传算法的最优参数值,进而重新执行上述遗传算法并得到最终优化后的苹果自动装箱路径,具体表现为:利用穷举法找出使得机械臂末端执行器运行时间值Time_action与程序运算时间值Time_operation之和为最小的种群规模、交叉概率、变异概率、比较替换概率值,并将求出的四个参数值代入上述遗传算法,求得最终的输出结果,即为所求的优化后的苹果自动装箱路径。
本发明具有的有益效果是:
本发明利用当前已知的苹果抓取点和放置点位置信息,通过自动装箱技术能够提高产业工作效率,减少相关产业工作时间,同时减少了劳动成本,降低了劳动强度,有效促进农业智能化生产方式升级。
附图说明
图1表示本发明的基于最优参数遗传算法的苹果自动装箱路径优化方法的系统组成图;
图2表示本发明的基于最优参数遗传算法的苹果自动装箱路径优化方法的流程图;
图3表示本发明的末端执行器在某个点位的机械臂旋转角度多解图俯视图例;
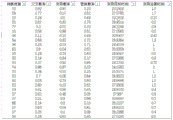
图4表示种群规模、交叉、变异、比较替换参数以及输出结果的部分数值图例;
图5表示本发明的基于最优参数遗传算法路径优化迭代图例;
图6表示本发明的最终优化路径得到的机械臂路径简图图例。
图1中:1.自动装箱机械臂,2.苹果放置点位,3.苹果抓取点位,4.计算机,5.路径优化算法实现软件,6.图像采集装置。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明。
图1为基于最优参数遗传算法的苹果自动装箱路径优化方法的一个具体实施例。机械臂自动装箱是通过具有二连杆的水平转动关节的自动装箱机械臂1在苹果抓取点位3和苹果放置点位2之间进行装箱运动,自动装箱机械臂1的连杆长度分别为400mm和350mm;计算机4为华硕K550V笔记本电脑,内存4G,CPU为Intel Core i5-6300HQ,WIN 10操作系统;软件5为MATLAB R2017a编写的装箱路径优化算法。如图2所示,算法具体实现如下:
本发明通过图像处理技术得到苹果抓取点位3与放置点位2的位置信息,生成相应的点位矩阵;通过点位矩阵生成初始种群,初始种群是以N条染色体组成,其中抓取点位3和放置点位2构成的路径编码称为染色体;对初始种群染色体进行交叉、变异操作;进而对染色体进行比较替换操作,即通过对当前种群染色体进行基于机械臂末端执行器运行时间的适应度计算,并将当前种群最优染色体与历代种群最优染色体比较,保留两者中较优染色体为当前种群新最优,并用当前新最优染色体替换较差染色体;重复交叉、变异、比较替换操作的过程,直至达到迭代次数并输出优化结果;多次随机改变种群规模大小N、交叉操作中交叉概率、变异操作中变异概率、比较替换操作中比较替换概率四个操作参数的值重复进行上述操作,并得到相对应的机械臂末端执行器的运行时间和程序运行时间;将输出值与四个操作参数值进行线性拟合得到回归方程;利用穷举法在回归方程中基于各个参数的取值范围以机械臂末端执行器运行时间以及程序运算时间之和最小为目标找出合适的参数值作为遗传算法的最优参数值,进而重新执行上述遗传算法并得到最终优化后的苹果自动装箱路径。
所述的通过图像处理技术得到苹果抓取点位3与放置点位2的位置信息,生成相应的点位矩阵,具体过程为:提前设定苹果抓取点位3和放置点位2的坐标,并将抓取点位3和放置点位2分别按顺序进行负实数标号和正实数标号;利用图像采集装置6采集并判断当前设定的苹果抓取点位3和放置点位2中是否存在苹果,记录目前抓取点位3中存在苹果的负实数标号和目前放置点位2中不存在苹果的正实数标号;将记录出的正实数标号和负实数标号分别生成实数矩阵。
所述的通过点位矩阵生成初始种群,初始种群是以N条染色体组成,其中抓取点位和放置点位构成的路径编码称为染色体,具体过程为:在已生成的正实数矩阵和负实数矩阵基础上,由于苹果自动装箱采用双连杆双水平旋转关节的装箱机械臂1,因此在设定的抓取范围之内,末端执行器在任一位置点机械臂都有两种不同姿态的旋转角度解(如图3所示),分别记为同一个点位的相邻实数标号,如当前末端执行器所在的位置点位编号为-2,则此位置点位的两种不同姿态的旋转角度解编号为-21、-22,故负实数矩阵空间长度为2倍的抓取点个数,正实数矩阵空间长度为2倍的放置点个数,矩阵中每奇偶相邻的两个实数标号表示抓取范围内同一个点的机械臂不同姿态的旋转角度解;染色体的路径编码的初始点和最终点记为0,0表示机械臂末端执行器的初始位置和最终结束位置,初始位置和结束位置均为机械臂1的两连杆自然伸展状态下位于机械臂基座正前方时末端执行器所在位置;其他染色体偶数位编码为负实数,负实数从负实数矩阵中随机抽取;其他染色体奇数位编码为正实数,正实数从正实数矩阵中随机抽取不同点位的任一角度解标号,同一个放置点位不重复抽取;重复上述过程直至满足生成的种群染色体为N条,即种群规模大小为N。此处N取值为(10,100),取整。
所述的对种群染色体进行交叉操作,其交叉算法过程描述如下:假设记录的苹果抓取点位3和苹果放置点位2分别有m和n个,其中m和n均为正整数,对于满足交叉概率的父代个体有如下步骤,其中交叉概率取值为(0,1),
a)随机产生两个正整数acr_node和acr_len,其中acr_node表示交叉起点位,范围为[2,2n+1],acr_len表示交叉长度,范围为[0,2n-1];若产生的acr_node+acr_len≥2n+1,则记acr_node+acr_len=2n+1;假设苹果抓取点位3有4个位置和苹果放置点位2有14个位置(如图3所示),产生的两个数分别为acr_node=6,acr_len=12;
b)假设此时需要交叉的两个父代个体为A=[0-11 12-22 21-31 32-42 41-1252-21 61-32 72-41 81-11 92-22 101-31 112-42 121-12 132-21 141 0],B=[0-41 51-32 21-21 81-12 61-42 12-31 111-22 121-11 32-41 92-32 141-21 42-12 72-42 132-31 101 0];首先将两个父代个体的第acr_node位到第acr_node+acr_len位进行交叉互换,则得到子代个体为A1=[0-11 12-22 21-21 81-12 61-42 12-31 111-22 121-11 32-4192-22 101-31 112-42 121-12 132-21 141 0],B1=[0-41 51-32 21-31 32-42 41-1252-21 61-32 72-41 81-11 92-32 141-21 42-12 72-42 132-31 101 0];
c)分别对子代个体A1、B1中的染色体编码进行搜索检查,将A1、B1编码中未进行交叉的第acr_node位之前的编码和第acr_node+acr_len位之后的编码分别与交叉区间[acr_node,acr_node+acr_len]内的编码进行比较,若发现未进行交叉的编码区间中正实数部分与交叉区间中的正实数部分具有相同或者相邻的实数,则标记出这些实数编码并用200代替;最终子代染色体更新得A1=[0-11 200-22 21-21 81-12 61-42 12-31 111-22 121-1132-41 92-22 101-31 200-42 200-12 132-21 141 0],B1=[0-41 200-32 21-31 32-4241-12 52-21 61-32 72-41 81-11 92-32 141-21 200-12 200-42 132-31 101 0];
d)对当前含有200的每个染色体进行扫描,标记出A1、B1染色体中已存在的大于0且不等于200的实数编码,将这些实数编码映射到苹果放置点的位置,即标记出当前染色体中已有的苹果放置点位;从初始苹果放置点位中去除已标记的苹果放置点位,得到未使用的苹果放置点位;将含有200的染色体中每个实数200随机替换成未使用的任一苹果放置点位中任一角度解标号,苹果放置点位不可重复选取;于是子代染色体更新得A1=[0-11 71-22 21-21 81-12 61-42 12-31 111-22 121-11 32-41 92-22 101-31 42-42 52-12 132-21 141 0],B1=[0-41 111-32 21-31 32-42 41-12 52-21 61-32 72-41 81-11 92-32141-21 12-12 122-42 132-31 101 0]。
所述的对当前种群染色体进行变异操作,其变异算法过程具体表现为:对于满足变异概率的染色体,变异概率取值为(0,1),随机生成一个在区间[2,2n+1]的正整数mut_node,其中n为放置点位2的个数,若mut_node为奇数,观察染色体中在此奇数位编码上的实数是正奇数还是正偶数,若是正奇数则加1,若是正偶数则减1;若mut_node为偶数,观察此偶数位编码上的实数是负奇数还是负偶数,若是负奇数则减1,若是负偶数则加1;最终更新得到新的染色体。具体表现为:假设在变异概率为0.2的前提下,假设mut_node为7,在上述最新子代染色体A1中,第7位编码是正奇数81,则需要将81加1,即将81更改为82,此处变更所表达的意思为相同点位中选择不同的角度解进行运算。
所述的比较替换操作中对当前种群染色体进行基于机械臂末端执行器运行时间的适应度计算,适应度函数为fitness(x)=1/Time(x),将每条染色体的适应度值置于区间(0,1),其中Time(x)表示为当前染色体所规划路径运行的总时间;所述的将当前种群最优染色体与历代种群最优染色体比较,保留两者中较优染色体为当前种群最优,具体表现为将已经计算过适应度值的染色体进行排序,记录当前染色体中最优染色体及其适应度值于ch_best及Max_fit中,将此染色体的适应度值Max_fit和历代种群最优染色体的适应度值相比较,适应度值较高者保留为新历代最优染色体,比较所得的新历代最优染色体及其适应度值为ch_best_new及Max_fit_new;所述的用当前新历代最优染色体替换较差染色体,具体表现为通过适应度限制条件fitness_limit=(Max_fit_new-Min_fit)×coefficient+Min_fit,将当前种群染色体适应度值小于fitness_limit的染色体全部标记出来,并将当前种群中适应度值小于fitness_limit的染色体全部用当前新历代最优染色体进行替换,最终形成N条染色体的新一代种群,其中Max_fit_new表示当前新历代最优染色体适应度值,Min_fit表示当前种群中染色体最低适应度值,coefficient表示比较替换概率且取值区间为(0,1)。假设当前Max_fit_new为0.03571,Min_fit为0.02778,coefficient取值为0.2,则fitness_limit为0.029366,则表示适应度值小于0.029366的染色体均会被当前新历代最优染色体替换。
所述的重复交叉、变异、比较替换操作的过程,直至达到迭代次数输出优化结果,具体表现为每一次种群中所有染色体完成交叉、变异、比较替换操作视为一次迭代过程,当前迭代所得的新种群作为下一次迭代过程的输入种群,最终迭代次数设为iter,即运算iter代将最终优化后的苹果自动装箱路径和时间输出,此处iter设为150。
所述的多次随机改变种群规模大小N、交叉操作中交叉概率、变异操作中变异概率、比较替换操作中比较替换概率四个操作参数的值重复进行上述操作,并得到相对应的机械臂末端执行器的运行时间和程序运行时间,具体表现为通过随机函数生成H组不重复的种群规模、交叉概率、变异概率、比较替换概率值,种群染色体在上述交叉、变异、比较替换的操作流程下,每一组参数能输出一个相对应的机械臂末端执行器的运行时间值Time_action以及程序运算时间值Time_operation,并记录下来。其中H设为365,部分数值如图4所示。
所述的将输出值与四个操作参数值进行线性拟合并得到回归方程,具体表现为将H组不重复的种群规模、交叉概率、变异概率、比较替换概率值作为输入以及机械臂末端执行器的运行时间值Time_action、程序运算时间值Time_operation作为输出建立回归模型,最终求得两个线性回归方程分别为机械臂末端执行器的运行时间值Time_action与种群规模、交叉概率、变异概率、比较替换概率的回归方程以及程序运算时间值Time_operation与种群规模、交叉概率、变异概率、比较替换概率的回归方程。
所述的利用穷举法在回归方程中基于各个参数的取值范围以机械臂末端执行器运行时间以及程序运算时间之和最小为目标找出合适的参数值作为遗传算法的最优参数值,进而重新执行上述遗传算法并得到最终优化后的苹果自动装箱路径,具体表现为利用穷举法找出使得机械臂末端执行器运行时间值Time_action与程序运算时间值Time_operation之和为最小的种群规模、交叉概率、变异概率、比较替换概率值,并将求出的四个参数值代入上述遗传算法,求得最终的输出结果,即为所求的优化后的苹果自动装箱路径。最终经过四个最优参数得到的一个迭代图例如图5所示,优化路径简图如图6所示。
Claims (9)
1.一种基于最优参数遗传算法的苹果自动装箱路径优化方法,其特征在于:通过图像处理技术得到苹果抓取点位与放置点位的位置信息,生成相应的点位矩阵;通过点位矩阵生成初始种群,初始种群是以N条染色体组成,其中抓取点位和放置点位构成的路径编码称为染色体,在苹果抓取点位对应的负实数矩阵以及苹果放置点位对应的正实数矩阵基础上,由于苹果自动装箱采用双连杆双水平旋转关节的装箱机械臂,因此在设定的抓取范围之内,末端执行器在任一位置点机械臂都有两种不同姿态的旋转角度解,分别记为同一个点位的相邻实数标号,故负实数矩阵空间长度为2倍的抓取点个数,正实数矩阵空间长度为2倍的放置点个数,矩阵中每奇偶相邻的两个实数标号表示抓取范围内同一个点的机械臂不同姿态旋转角度解;染色体的路径编码的初始点和最终点记为0,0表示机械臂末端执行器的初始位置和最终结束位置,初始位置和结束位置均为机械臂的两连杆自然伸展状态下位于机械臂基座正前方时末端执行器所在位置,其他偶数位编码为负实数,负实数从负实数矩阵中随机抽取,其他奇数位编码为正实数,正实数从正实数矩阵中随机抽取不同点位的任一角度解标号,同一个放置点位不重复抽取;重复上述过程直至满足生成的种群染色体为N条,即种群规模大小为N,N取值为(10,100),取整;对初始种群染色体进行交叉、变异操作;进而对染色体进行比较替换操作,即通过对当前种群染色体进行基于机械臂末端执行器运行时间的适应度计算,适应度函数为fitness(x)=1/Time(x),其中Time(x)为当前染色体所规划路径运行的总时间,将每条染色体的适应度值置于区间(0,1),并将当前种群最优染色体与历代种群最优染色体比较,保留两者中较优染色体为当前种群新最优,并用当前新最优染色体替换较差染色体;重复交叉、变异、比较替换操作的过程,直至达到迭代次数并输出优化结果;多次随机改变种群规模大小N、交叉操作中交叉概率、变异操作中变异概率、比较替换操作中比较替换概率四个操作参数的值重复进行上述操作,并得到相对应的机械臂末端执行器的运行时间和程序运行时间;将输出值与四个操作参数值进行线性拟合得到回归方程;利用穷举法在回归方程中基于各个参数的取值范围以机械臂末端执行器运行时间以及程序运算时间之和最小为目标找出合适的参数值作为遗传算法的最优参数值,进而重新执行上述遗传算法并得到最终优化后的苹果自动装箱路径。
2.根据权利要求1所述的一种基于最优参数遗传算法的苹果自动装箱路径优化方法,其特征在于,所述的通过图像处理技术得到苹果抓取点位与放置点位的位置信息,生成相应的点位矩阵,具体过程为:提前设定苹果抓取点位和放置点位的坐标,并将抓取点位和放置点位分别按顺序进行负实数标号和正实数标号;利用图像采集装置采集并判断当前设定的苹果抓取点位和放置点位中是否存在苹果,记录目前抓取点位中存在苹果的负实数标号和目前放置点位中不存在苹果的正实数标号;将记录出的正实数标号和负实数标号分别生成实数矩阵。
3.根据权利要求1所述的一种基于最优参数遗传算法的苹果自动装箱路径优化方法,其特征在于,所述的对初始种群染色体进行交叉操作,其交叉算法过程描述如下:假设苹果抓取点位有m个位置和苹果放置点位有n个位置,对于满足交叉概率的父代个体,其中交叉概率取值为(0,1),
a)随机产生两个正整数acr_node和acr_len,其中acr_node表示交叉起点位,范围为[2,2n+1],acr_len表示交叉长度,范围为[0,2n-1];若产生的acr_node+acr_len≥2n+1,则记acr_node+acr_len=2n+1;假设苹果抓取点位和苹果放置点位分别有4和14个位置,产生的两个数分别为acr_node=6,acr_len=12;
b)假设此时需要交叉的两个父代个体为A=[0-11 12-22 21-31 32-42 41-1252-2161-32 72-41 81-11 92-22 101-31 112-42 121-12 132-21 141 0],B=[0-4151-32 21-21 81-12 61-42 12-31 111-22 121-11 32-41 92-32 141-21 42-12 72-42 132-31 1010];首先将两个父代个体的第acr_node位到第acr_node+acr_len位进行交叉互换,则得到子代个体为A1=[0-11 12-22 21-21 81-12 61-42 12-31111-22 121-11 32-41 92-22101-31 112-42 121-12 132-21 141 0],B1=[0-41 51-32 21-31 32-42 41-12 52-2161-32 72-41 81-11 92-32 141-21 42-12 72-42132-31 101 0];
c)分别对子代个体A1、B1中的染色体编码进行搜索检查,将A1、B1编码中未进行交叉的第acr_node位之前的编码和第acr_node+acr_len位之后的编码分别与交叉区间[acr_node,acr_node+acr_len]内的编码进行比较,若发现未进行交叉的编码区间中正实数部分与交叉区间中的正实数部分具有相同或者相邻的实数,则标记出这些实数编码并用200代替;最终子代染色体更新得A1=[0-11200-22 21-21 81-12 61-42 12-31 111-22 121-1132-41 92-22 101-31 200-42200-12 132-21 141 0],B1=[0-41 200-32 21-31 32-4241-12 52-21 61-32 72-4181-11 92-32 141-21 200-12 200-42 132-31 101 0];
d)对当前含有200的每个染色体进行扫描,标记出A1、B1染色体中已存在的大于0且不等于200的实数编码,将这些实数编码映射到苹果放置点的位置,即标记出当前染色体中已有的苹果放置点位;从初始苹果放置点位中去除已标记的苹果放置点位,得到未使用的苹果放置点位;将含有200的染色体中每个实数200随机替换成未使用的任一苹果放置点位中任一角度解标号,苹果放置点位不可重复选取;于是子代染色体更新得A1=[0-11 71-2221-21 81-12 61-4212-31 111-22 121-11 32-41 92-22 101-31 42-42 52-12 132-21141 0],B1=[0-41 111-32 21-31 32-42 41-12 52-21 61-32 72-41 81-11 92-32 141-21 12-12122-42 132-31 101 0]。
4.根据权利要求1所述的一种基于最优参数遗传算法的苹果自动装箱路径优化方法,其特征在于,所述的对当前种群染色体进行变异操作,其变异算法过程具体表现为:对于满足变异概率的染色体,变异概率取值为(0,1),随机生成一个在区间[2,2n+1]的正整数mut_node,其中n为放置点位个数,若mut_node为奇数,观察染色体中在此奇数位编码上的实数是正奇数还是正偶数,若是正奇数则加1,若是正偶数则减1;若mut_node为偶数,观察此偶数位编码上的实数是负奇数还是负偶数,若是负奇数则减1,若是负偶数则加1;最终更新得到新的染色体。
5.根据权利要求1所述的一种基于最优参数遗传算法的苹果自动装箱路径优化方法,其特征在于,
所述的将当前种群最优染色体与历代种群最优染色体比较,保留两者中较优染色体为当前种群最优,具体表现为将已经计算过适应度值的染色体进行排序,记录当前染色体中最优染色体及其适应度值于ch_best及Max_fit中,将此染色体的适应度值Max_fit和历代种群最优染色体的适应度值相比较,适应度值较高者保留为新历代最优染色体,比较所得的新历代最优染色体及其适应度值为ch_best_new及Max_fit_new;
所述的用当前新历代最优染色体替换较差染色体,具体表现为通过适应度限制条件fitness_limit=(Max_fit_new-Min_fit)×coefficient+Min_fit,将当前种群染色体适应度值小于fitness_limit的染色体全部标记出来,并将当前种群中适应度值小于fitness_limit的染色体全部用当前新历代最优染色体进行替换,最终形成N条染色体的新一代种群,其中Max_fit_new表示新历代最优染色体适应度值,Min_fit表示当前种群中染色体最低适应度值,coefficient表示比较替换概率且取值区间为(0,1)。
6.根据权利要求1所述的一种基于最优参数遗传算法的苹果自动装箱路径优化方法,其特征在于,所述的重复交叉、变异、比较替换操作的过程,直至达到迭代次数输出优化结果,具体表现为:每一次种群中所有染色体完成交叉、变异、比较替换操作视为一次迭代过程,当前迭代所得的新种群作为下一次迭代过程的输入种群,最终迭代次数设为iter,即运算iter代将最终优化后的苹果自动装箱路径和时间输出。
7.根据权利要求1所述的一种基于最优参数遗传算法的苹果自动装箱路径优化方法,其特征在于,所述的多次随机改变种群规模大小N、交叉操作中交叉概率、变异操作中变异概率、比较替换操作中比较替换概率四个操作参数的值重复进行上述操作,并得到相对应的机械臂末端执行器的运行时间和程序运行时间,具体表现为:通过随机函数生成H组不重复的种群规模、交叉概率、变异概率、比较替换概率值,种群染色体在上述交叉、变异、比较替换的操作流程下,每一组参数能输出一个相对应的机械臂末端执行器的运行时间值Time_action以及程序运算时间值Time_operation,并记录下来。
8.根据权利要求1所述的一种基于最优参数遗传算法的苹果自动装箱路径优化方法,其特征在于,所述的将输出值与四个操作参数值进行线性拟合并得到回归方程,具体表现为:将H组不重复的种群规模、交叉概率、变异概率、比较替换概率值作为输入以及机械臂末端执行器的运行时间值Time_action、程序运算时间值Time_operation作为输出建立回归模型,最终求得两个线性回归方程分别为机械臂末端执行器的运行时间值Time_action与种群规模、交叉概率、变异概率、比较替换概率的回归方程以及程序运算时间值Time_operation与种群规模、交叉概率、变异概率、比较替换概率的回归方程。
9.根据权利要求1所述的一种基于最优参数遗传算法的苹果自动装箱路径优化方法,其特征在于,所述的利用穷举法在回归方程中基于各个参数的取值范围以机械臂末端执行器运行时间以及程序运算时间之和最小为目标找出合适的参数值作为遗传算法的最优参数值,进而重新执行上述遗传算法并得到最终优化后的苹果自动装箱路径,具体表现为:利用穷举法找出使得机械臂末端执行器运行时间值Time_action与程序运算时间值Time_operation之和为最小的种群规模、交叉概率、变异概率、比较替换概率值,并将求出的四个参数值代入上述遗传算法,求得最终的输出结果,即为所求的优化后的苹果自动装箱路径。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911171812.1A CN110889552B (zh) | 2019-11-26 | 2019-11-26 | 一种基于最优参数遗传算法的苹果自动装箱路径优化方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911171812.1A CN110889552B (zh) | 2019-11-26 | 2019-11-26 | 一种基于最优参数遗传算法的苹果自动装箱路径优化方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110889552A CN110889552A (zh) | 2020-03-17 |
| CN110889552B true CN110889552B (zh) | 2023-05-23 |
Family
ID=69748750
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911171812.1A Expired - Fee Related CN110889552B (zh) | 2019-11-26 | 2019-11-26 | 一种基于最优参数遗传算法的苹果自动装箱路径优化方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110889552B (zh) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112035224B (zh) * | 2020-07-17 | 2024-03-12 | 中国科学院上海微系统与信息技术研究所 | 一种适用于智能工厂的雾计算调度方法 |
| CN112188825B (zh) * | 2020-10-12 | 2021-09-24 | 合肥安迅精密技术有限公司 | 一种基于蝙蝠算法的多头贴片机贴装效率优化方法及系统 |
| CN113505930B (zh) * | 2021-07-16 | 2022-10-14 | 上海聚水潭网络科技有限公司 | 一种三维空间订单耗材推荐方法和系统 |
| CN113696189B (zh) * | 2021-10-28 | 2022-03-18 | 苏州贝塔智能制造有限公司 | 衣物裁片分配系统的容器优化分配方法及裁片分配方法 |
| CN116442215B (zh) * | 2023-03-13 | 2025-12-16 | 中国科学院深圳先进技术研究院 | 机械臂参数辨识补偿方法及系统 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101320441A (zh) * | 2008-07-18 | 2008-12-10 | 浙江大学 | 面向装箱问题的组合优化方法 |
| CN102870534A (zh) * | 2012-09-21 | 2013-01-16 | 浙江大学 | 一种基于遗传算法的穴盘苗自动移钵路径优化方法 |
| CN104978607A (zh) * | 2015-06-23 | 2015-10-14 | 浙江理工大学 | 一种基于贪心遗传算法的钵苗稀植移栽路径优化方法 |
| CN107784396A (zh) * | 2017-11-06 | 2018-03-09 | 上海海事大学 | 一种自动化集装箱码头关键装卸资源集成调度方法 |
| CN108364069A (zh) * | 2018-01-23 | 2018-08-03 | 广东工业大学 | 一种基于遗传算法的机器人焊接路径规划方法 |
| CN109800071A (zh) * | 2019-01-03 | 2019-05-24 | 华南理工大学 | 一种基于改进遗传算法的云计算任务调度方法 |
| CN109910012A (zh) * | 2019-04-03 | 2019-06-21 | 中国计量大学 | 一种基于遗传算法的机械臂轨迹规划优化方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107238388B (zh) * | 2017-05-27 | 2018-02-23 | 合肥工业大学 | 多无人机任务分配与航迹规划联合优化方法及装置 |
-
2019
- 2019-11-26 CN CN201911171812.1A patent/CN110889552B/zh not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101320441A (zh) * | 2008-07-18 | 2008-12-10 | 浙江大学 | 面向装箱问题的组合优化方法 |
| CN102870534A (zh) * | 2012-09-21 | 2013-01-16 | 浙江大学 | 一种基于遗传算法的穴盘苗自动移钵路径优化方法 |
| CN104978607A (zh) * | 2015-06-23 | 2015-10-14 | 浙江理工大学 | 一种基于贪心遗传算法的钵苗稀植移栽路径优化方法 |
| CN107784396A (zh) * | 2017-11-06 | 2018-03-09 | 上海海事大学 | 一种自动化集装箱码头关键装卸资源集成调度方法 |
| CN108364069A (zh) * | 2018-01-23 | 2018-08-03 | 广东工业大学 | 一种基于遗传算法的机器人焊接路径规划方法 |
| CN109800071A (zh) * | 2019-01-03 | 2019-05-24 | 华南理工大学 | 一种基于改进遗传算法的云计算任务调度方法 |
| CN109910012A (zh) * | 2019-04-03 | 2019-06-21 | 中国计量大学 | 一种基于遗传算法的机械臂轨迹规划优化方法 |
Non-Patent Citations (2)
| Title |
|---|
| 基于改进自适应遗传算法的机器人路径规划研究;田欣;刘广瑞;周文博;郭珂甫;;机床与液压(第17期);全文 * |
| 基于改进遗传算法的移动机器人路径规划;张毅;代恩灿;罗元;;计算机测量与控制(第01期);全文 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110889552A (zh) | 2020-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110889552B (zh) | 一种基于最优参数遗传算法的苹果自动装箱路径优化方法 | |
| Funk et al. | Learn2assemble with structured representations and search for robotic architectural construction | |
| Qian et al. | A hybrid differential evolution method for permutation flow-shop scheduling | |
| CN107186713B (zh) | 一种过路径点的机械臂多轴运动规划优化方法 | |
| Liu et al. | An improved genetic algorithm approach on mechanism kinematic structure enumeration with intelligent manufacturing | |
| CN117215275B (zh) | 一种基于遗传编程的柔性车间大规模动态双效调度方法 | |
| CN114037341B (zh) | 一种基于ddqn的智能车间动态自适应调度方法及系统 | |
| CN108364069A (zh) | 一种基于遗传算法的机器人焊接路径规划方法 | |
| CN115302507B (zh) | 数字孪生驱动的工业机器人拆解过程智能决策方法 | |
| US12508710B2 (en) | Method and system for cooperating packing actions and unpacking actions of mechanical arm based on deep reinforcement learning | |
| CN102867078A (zh) | 一种基于三维cad平台的机械产品拆卸工艺快速规划方法 | |
| CN110722560A (zh) | 一种基于重力势能的模块化机械臂构型优化方法 | |
| CN114707748A (zh) | 一种基于群体免疫-遗传算法的混流产线智能排产方法 | |
| CN106611213A (zh) | 一种求解作业车间调度问题的混合粒子群算法 | |
| CN117840985A (zh) | 一种考虑末端执行机构多姿态角的机器人工艺路径规划方法及系统 | |
| CN103714211A (zh) | 基于移动模式序列与多智能体粒子群的集成电路布图方法 | |
| CN113819919A (zh) | 一种基于布尔约束的机器人最优路径规划方法 | |
| CN117993280A (zh) | 不确定不可拆状态下的工业机器人拆解过程动态决策方法 | |
| CN113792927B (zh) | 基于遗传算法的航空航天柔性产品工序优化方法 | |
| Li et al. | Unity 3d-based simulation data driven robotic assembly sequence planning using genetic algorithm | |
| Wong et al. | A hybrid planning process for improving fabric utilization | |
| CN112885416A (zh) | 一种基于遗传算法的辛烷值损失模型参数优化方法 | |
| CN103996080B (zh) | 一种具有最大联通性的制造系统构型优化方法 | |
| Halperin et al. | Dynamic maintenance of kinematic structures | |
| CN115793591A (zh) | 基于改进仿生智能优化算法的液压缸分布式制造调度方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20230523 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |